
Investigation of Hysteresis Phenomena and Compensation in Piezoelectric Stacks for Active Rotor


Abstract
1. Introduction
2. Hysteresis Behaviors of a Piezoelectric Actuator
3. Hysteresis Model of Piezoelectric Actuator
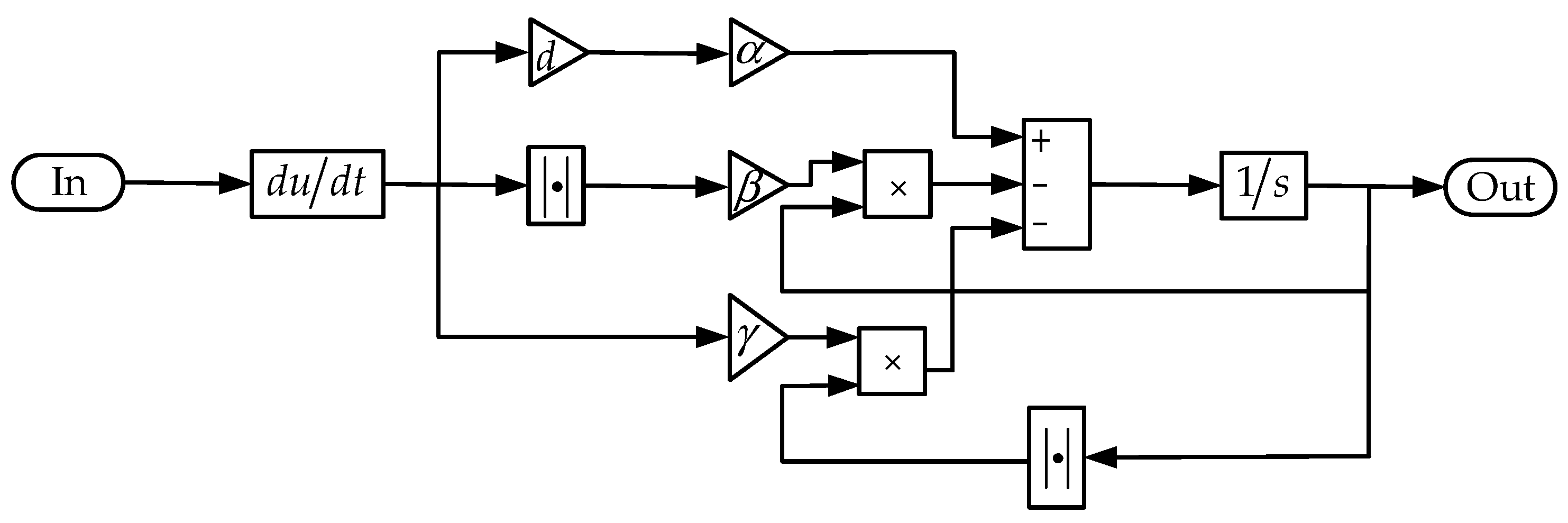
3.1. Bouc–Wen Model
3.2. Parameter Identification of Bouc–Wen Model
4. Hysteresis Compensation
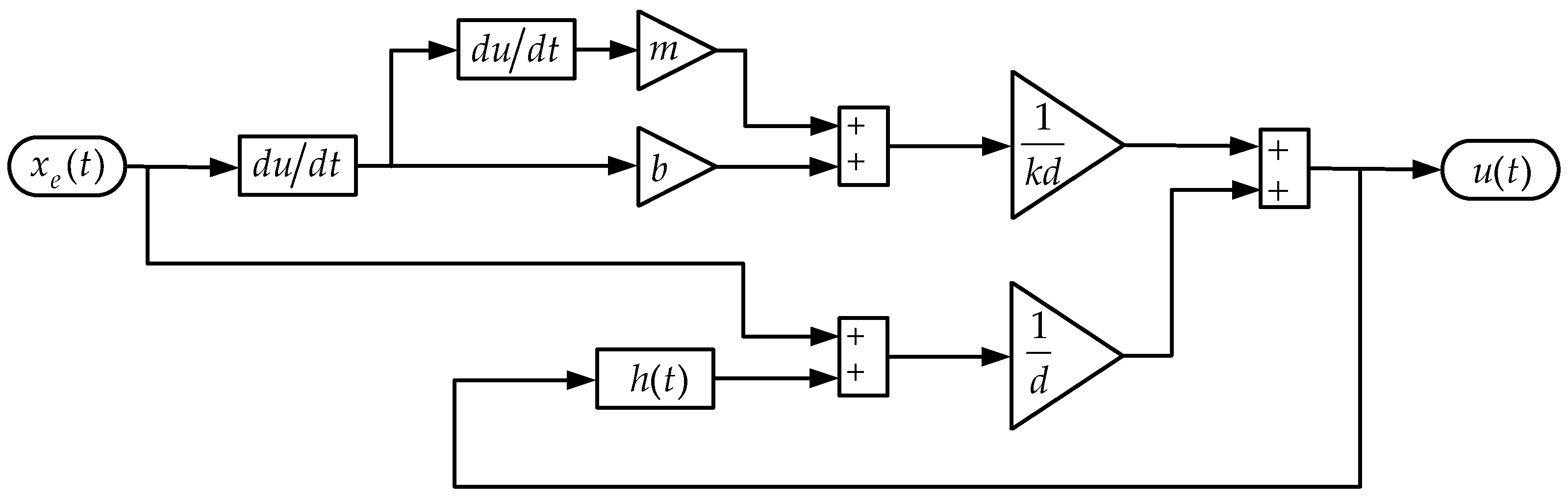
4.1. Inverse Bouc–Wen Hysteresis Model
4.2. Compound Control
5. Conclusions
- (1)
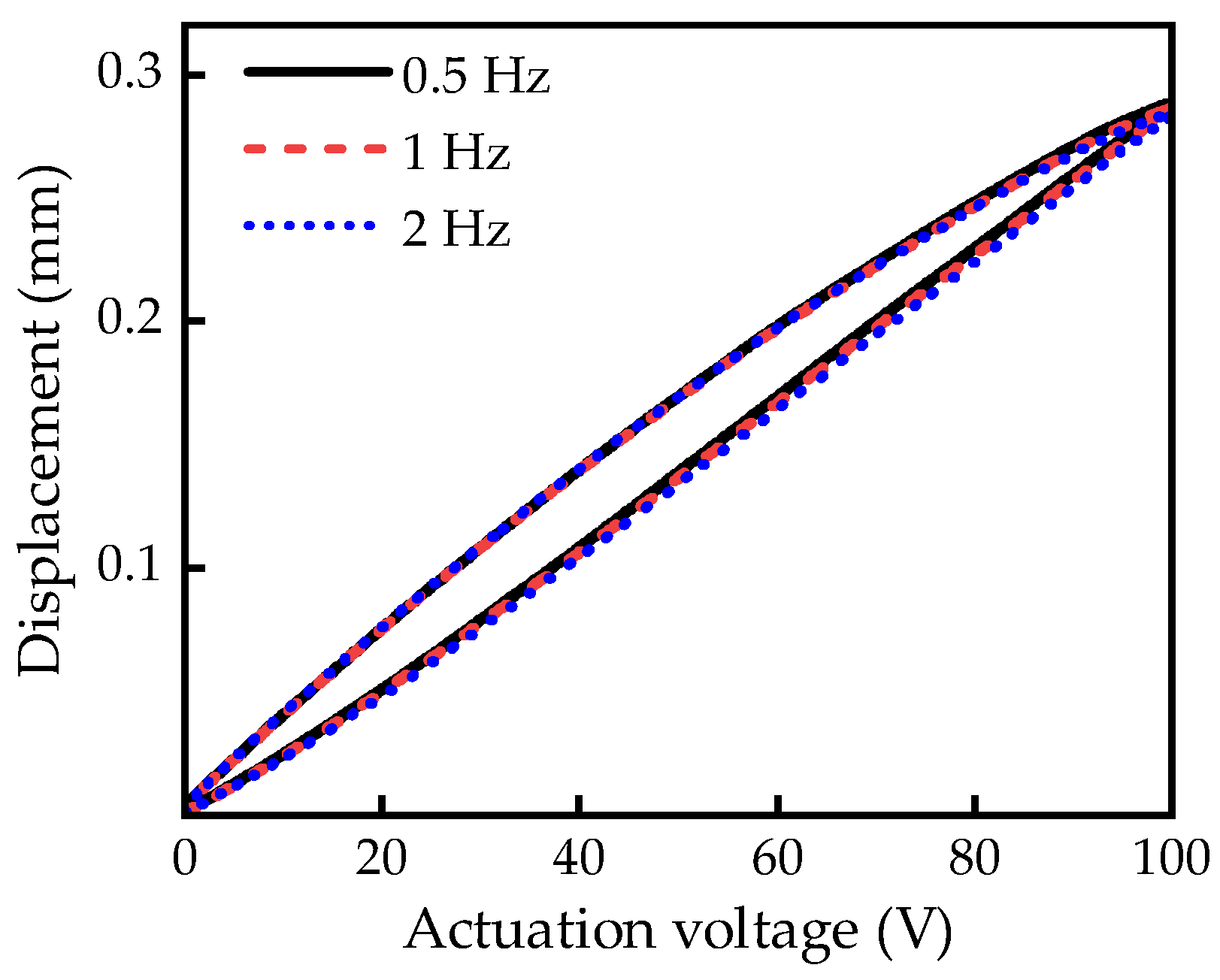
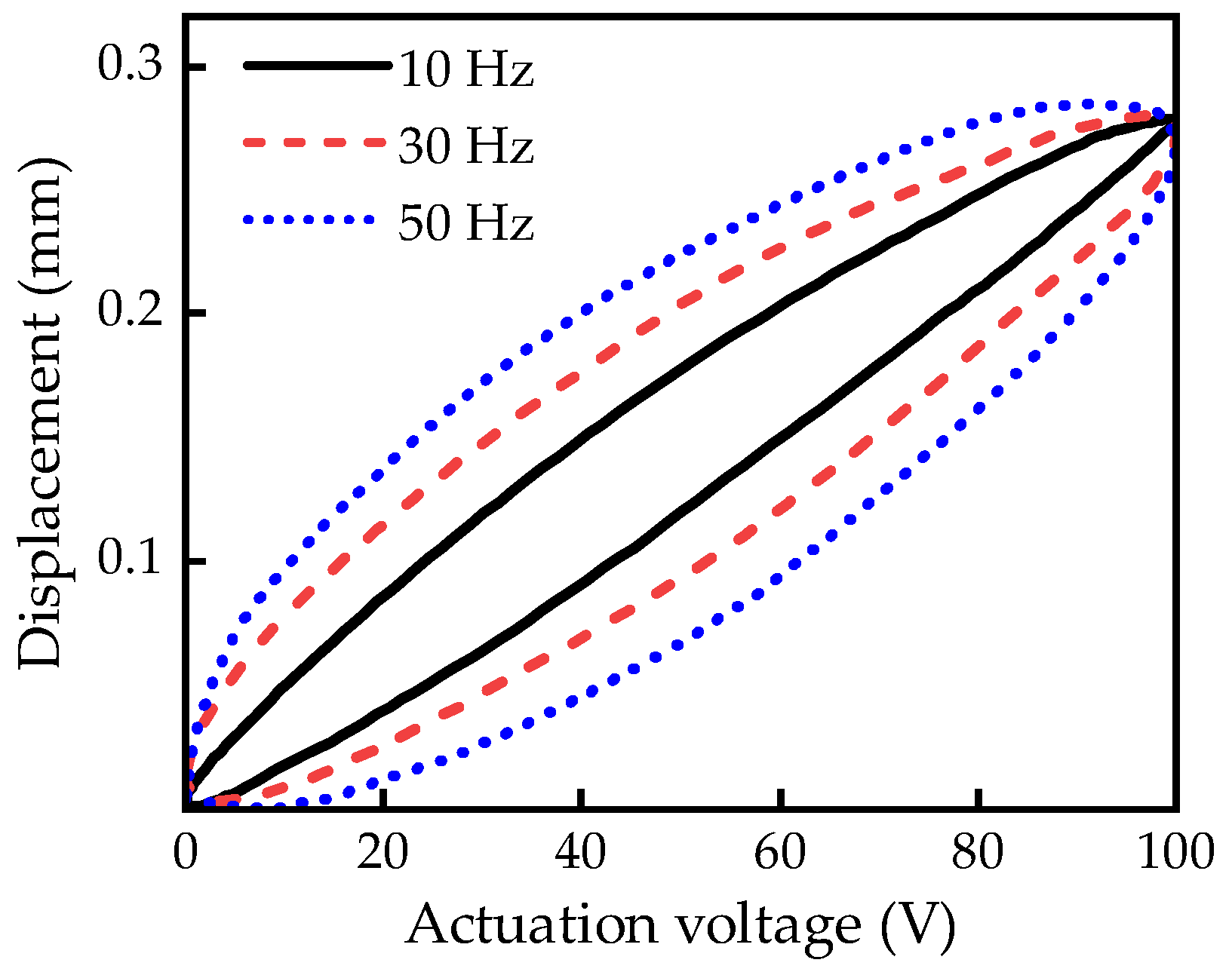
- Bench-top tests were conducted to study the hysteresis characteristics of the piezoelectric actuator. The test results showed that when the actuation frequencies are lower than 10 Hz, the hysteresis of the piezoelectric actuator is mainly determined by the characteristics of the piezoelectric materials, and the hysteresis curves of the piezoelectric actuator are almost identical. As the frequency of the actuation signal increases, the system characteristics of the actuator such as mass, damping, and stiffness will become more and more significant in the actuator hysteresis.
- (2)
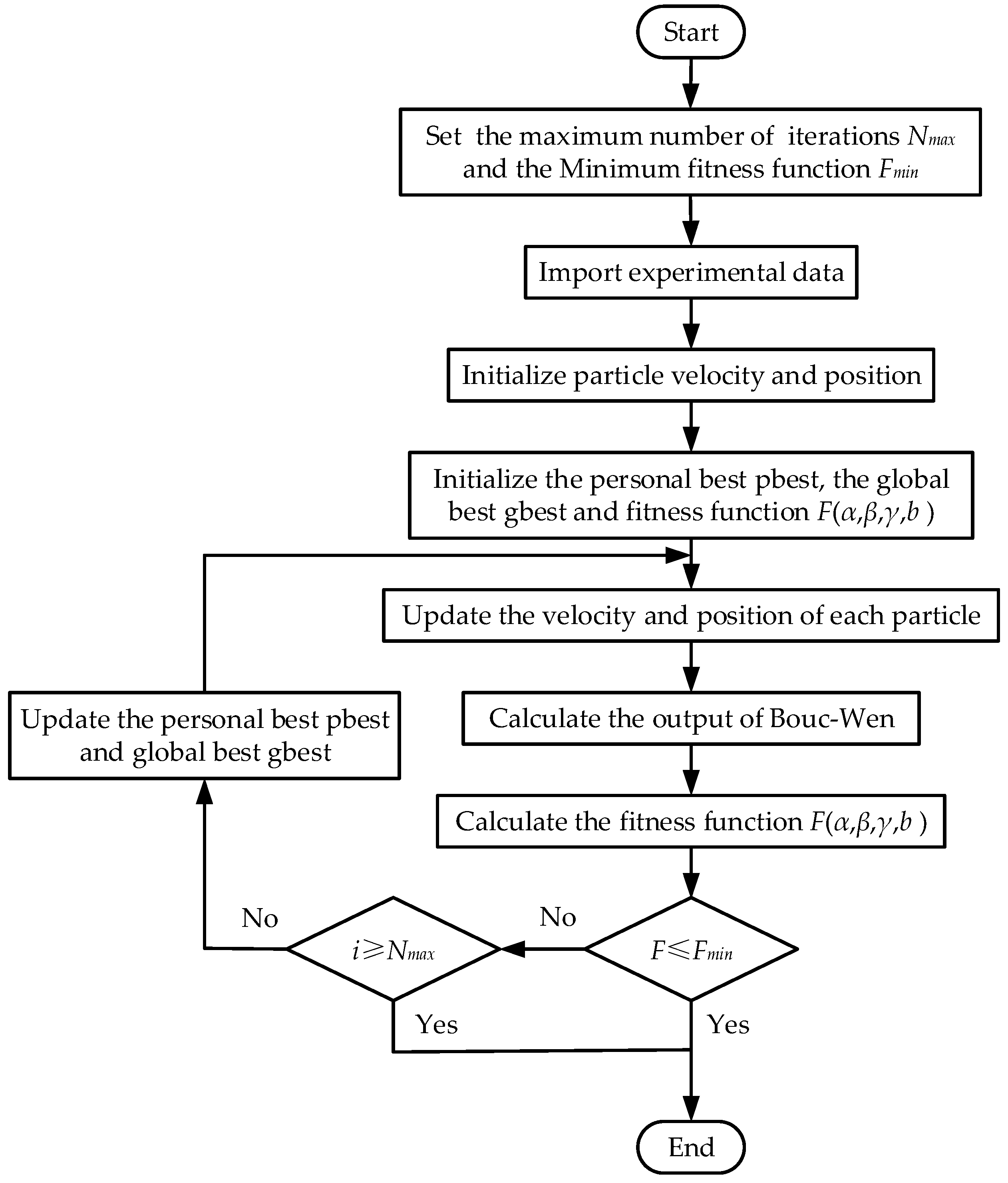
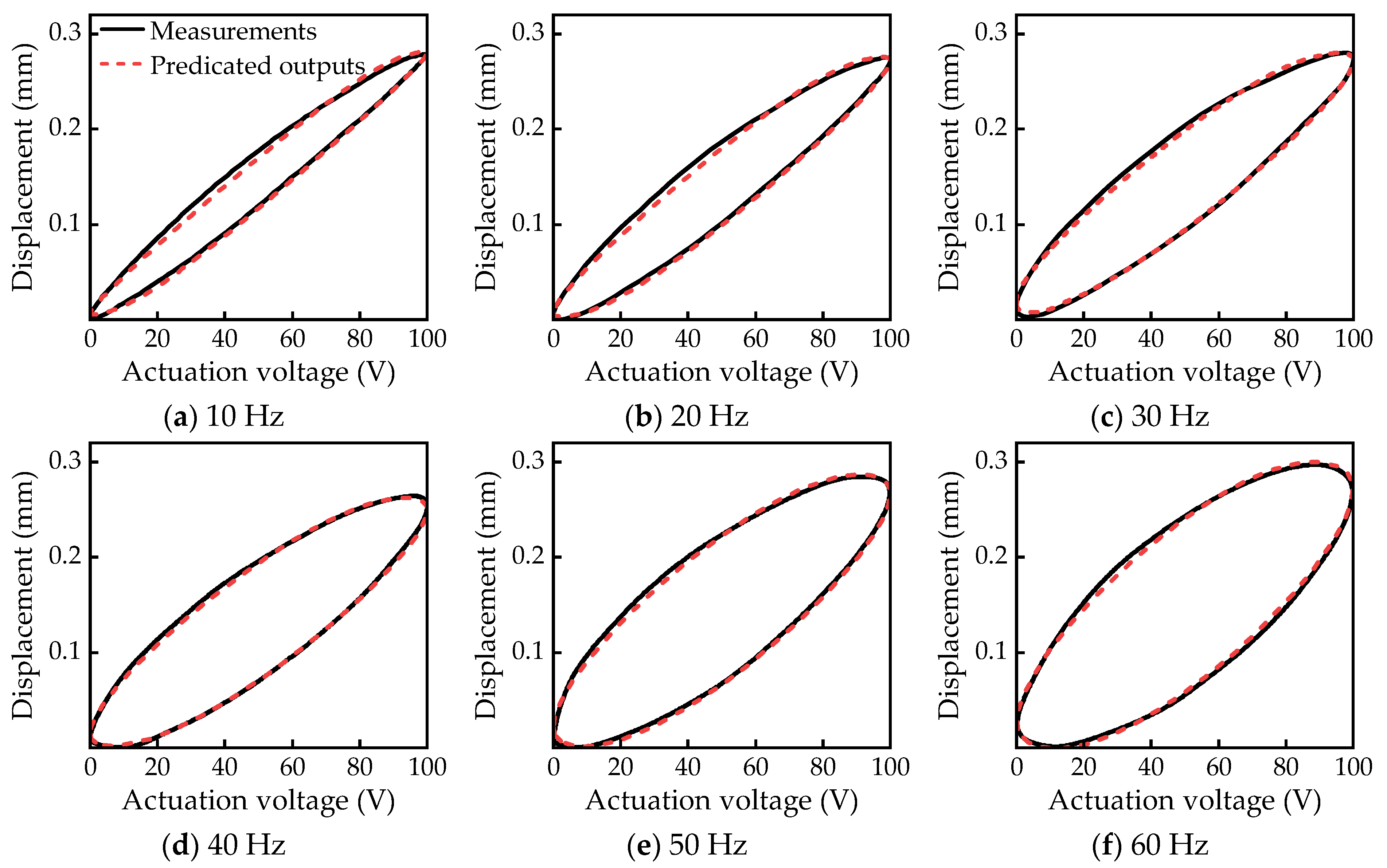
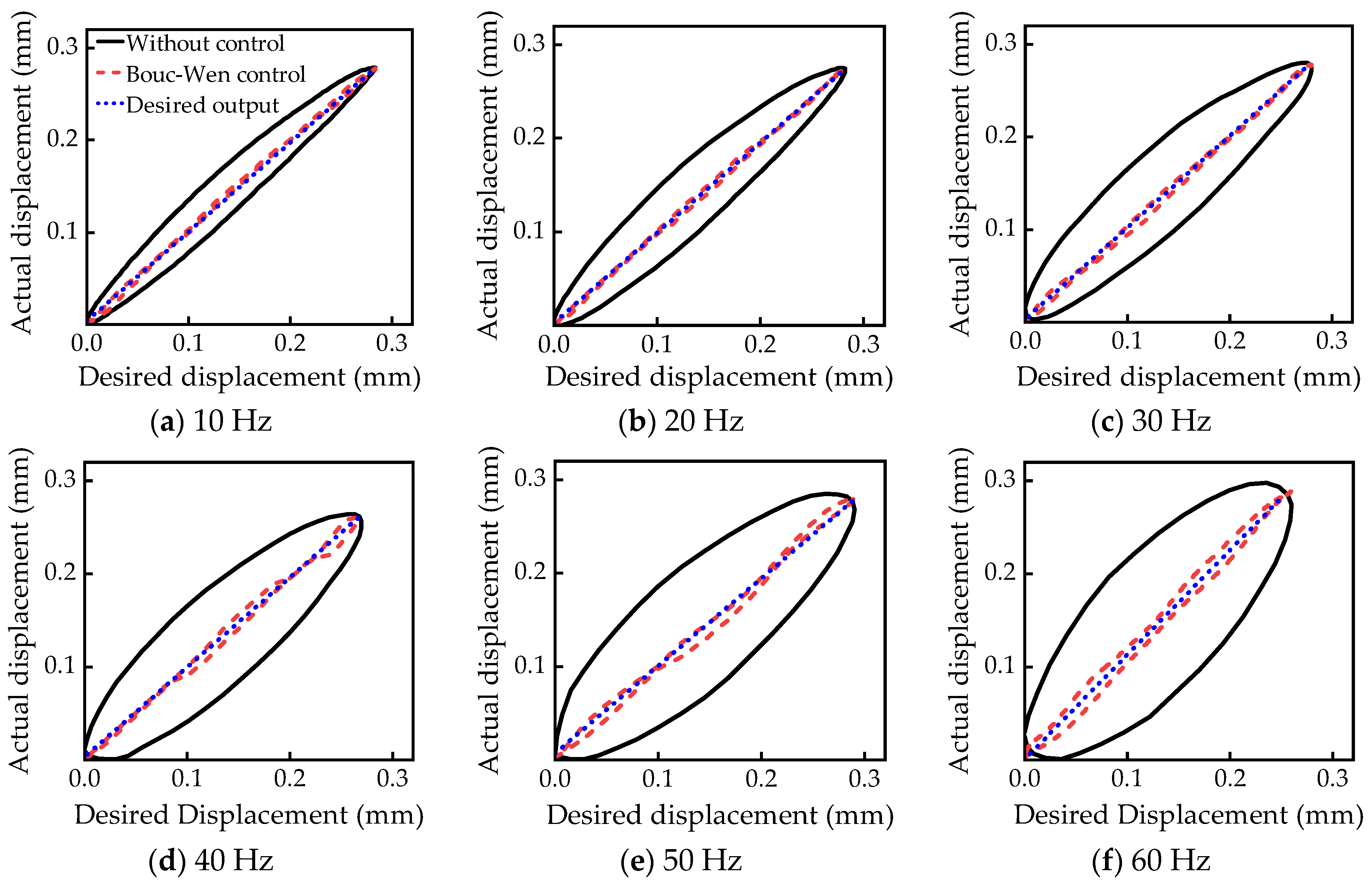
- The Bouc–Wen model was utilized to depict the actuator hysteresis behavior within the bandwidth range of 1 Hz to 60 Hz, and the PSO algorithm was used to identify the parameters of the Bouc–Wen model. The measurement and simulation results indicated that the Bouc–Wen model could accurately capture the hysteresis behavior of the actuator, which lay a foundation for hysteresis compensation.
- (3)
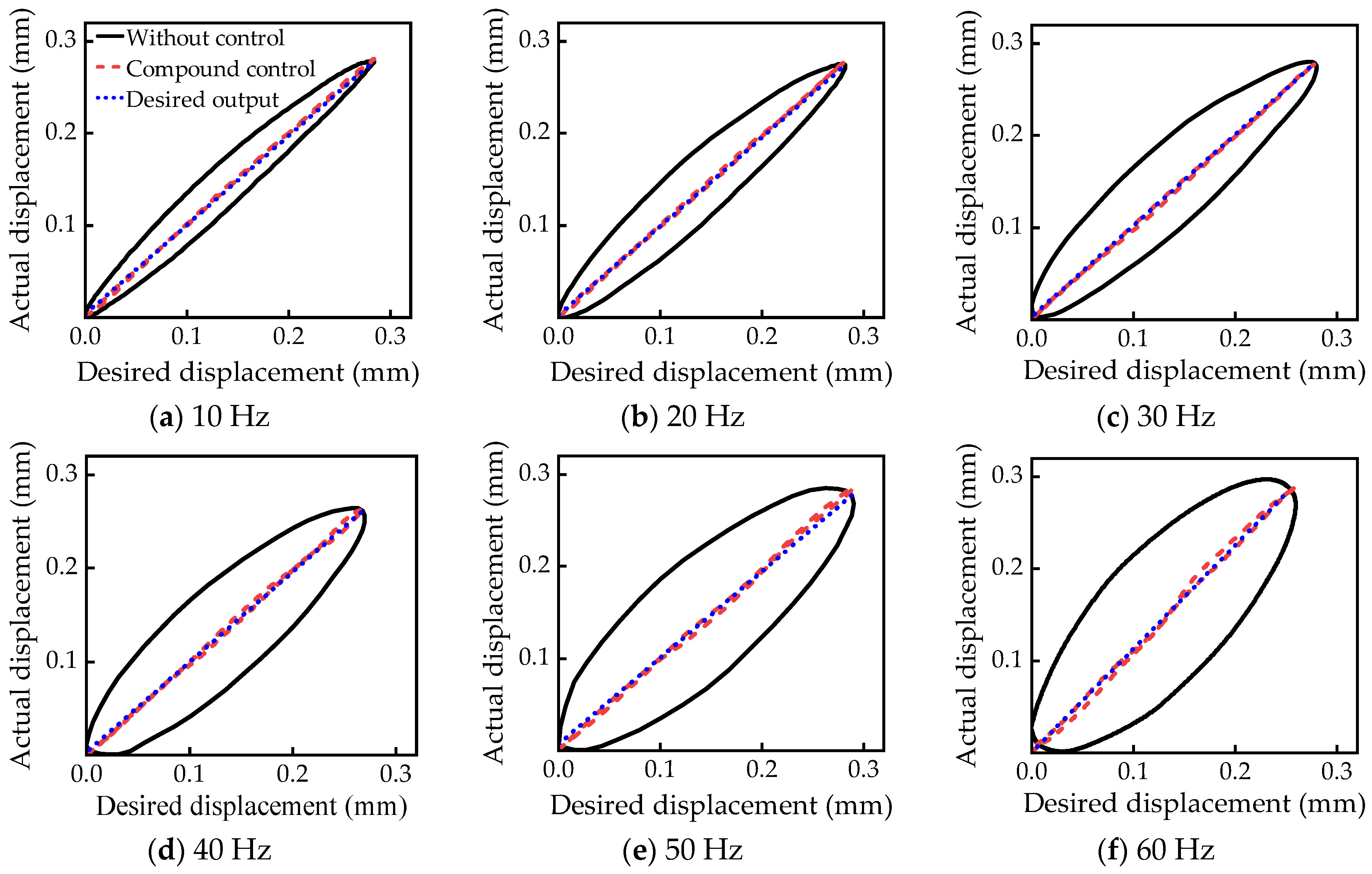
- Based on the inverse Bouc–Wen model and fuzzy PID feedback control, the compound control method was developed. Experimental results demonstrated that the hysteresis behavior of the piezoelectric actuator in the frequency bandwidth from 10 Hz to 60 Hz could be significantly suppressed. This method integrates a traditional rate-dependent model with fuzzy control, thus enhancing the adaptability and robustness of the hysteresis suppression in piezoelectric actuators for the active rotor.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Bertolino, A.C.; Gaidamo, M.; Smorto, S.; Porro, P.G.; Sorli, M. Development of a High-Performance Low-Weight Hydraulic Damper for Active Vibration Control of the Main Rotor on Helicopters—Part 1: Design and Mathematical Model. Aerospace 2023, 10, 391. [Google Scholar] [CrossRef]
- Breitbach, E.; Buter, A. The main sources of helicopter vibration and noise emissions and adaptive concepts to reduce them. J. Struct. Control. 1996, 3, 21–32. [Google Scholar] [CrossRef]
- Friedmann, P.P. On-blade control of rotor vibration, noise, and performance: Just around the corner? J. Am. Helicopter Soc. 2014, 59, 1–37. [Google Scholar] [CrossRef]
- Zhou, J.L.; Dong, L.H.; Yang, W.D. Experimental study on transfer functions of an active rotor under different flight conditions. Chin. J. Aeronaut. 2022, 35, 107–120. [Google Scholar] [CrossRef]
- Wu, Q.L.; Zhao, N.; Yao, M.H.; Niu, Y.; Wang, C. Free vibrations and frequency sensitivity of bionic microcantilevers with stress concentration effect. Int. J. Struct. Stab. Dy. 2025, 26, 265022. [Google Scholar] [CrossRef]
- Napole, C.M. Advanced control of piezoelectric actuators. Ph.D. Thesis, University of the Basque Country, Euskad, Spain, 2022. [Google Scholar]
- Nie, Z.G.; Cui, Y.G.; Huang, J.; Wang, Y.Q.; Chen, T.H. Precision open-loop control of piezoelectric actuator. J. Intel. Mat. Syst. Str. 2022, 33, 1198–1214. [Google Scholar] [CrossRef]
- Kurdila, A.J.; Li, J.; Strganac, T.; Webb, G. Nonlinear control methodologies for hysteresis in PZT actuated on-blade elevons. J. Aerosp. Eng. 2003, 16, 167–176. [Google Scholar] [CrossRef]
- Viswamurth, S.R.; Ganguli, R. Effect of piezoelectric hysteresis on helicopter vibration control using trailing-edge flaps. J. Guid. Control. Dyn. 2006, 29, 1201–1209. [Google Scholar] [CrossRef]
- Viswamurth, S.R.; Ganguli, R. Modeling and compensation of piezoceramic actuator hysteresis for helicopter vibration control. Sens. Actuators A Phys. 2007, 135, 801–810. [Google Scholar] [CrossRef]
- Viswamurth, S.R.; Rao, A.K.; Ganguli, R. Dynamic hysteresis of piezoceramic stack actuators used in helicopter vibration control: Experiments and simulations. Smart Mater. Struct. 2007, 16, 1109–1119. [Google Scholar] [CrossRef]
- Muir, E.R.; Friedmann, P.P.; Kumar, D. Effect of piezoceramic actuator hysteresis on helicopter vibration and noise reduction. J. Guid. Control. Dyn. 2012, 35, 1299–1311. [Google Scholar] [CrossRef]
- Muir, E.R.; Friedmann, P.P.; Kumar, D. Hysteresis characterization in piezoceramic stack actuators and its influence on vibration and noise reduction in helicopters using actively controlled flaps. In Proceedings of the 51st AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, Orlando, FL, USA, 12–15 April 2010. [Google Scholar]
- Ganguli, R.; Viswamurth, S.R. Piezoelectric actuators in helicopter active vibration control. In Micro and Smart Devices and Systems; Springer: New Delhi, India, 2014; pp. 111–125. [Google Scholar] [CrossRef]
- Kanchan, M.; Santhya, M.; Bhat, R.; Naik, N. Application of Modeling and Control Approaches of Piezoelectric Actuators: A Review. Technologies 2023, 11, 155. [Google Scholar] [CrossRef]
- Hao, G.L.; Cao, K.R.; Li, R.; Li, Z.; Du, H.; Tan, L.Y. Rate-dependent hysteresis modeling and compensation for fast steering mirrors. Sens. Actuators A Phys. 2024, 376, 115568. [Google Scholar] [CrossRef]
- Cai, J.N.; Dong, W.; Nagamune, R. A survey of Bouc-Wen hysteretic models applied to piezo-actuated mechanical systems: Modeling, identification, and control. J. Intel. Mat. Syst. Str. 2023, 34, 1843–1863. [Google Scholar] [CrossRef]
- Zhang, Z.X.; Zhang, G.H.; Wang, S.X.; Shi, C.Y. hysteresis modeling and compensation for tendon-sheath mechanisms in robot-assisted endoscopic surgery based on the modified Bouc-Wen model with decoupled model parameters. IEEE Trans. Med. Robot. Bionics 2023, 5, 218–219. [Google Scholar] [CrossRef]
- Yu, L.H.; Zhang, X.M.; Lai, J.H.; Fatikow, S. Tracking control of a piezo-actuated compliant mechanism based on an improved Bouc-Wen hysteresis model with variable parameters. Aip Adv. 2023, 13, 055129. [Google Scholar] [CrossRef]
- Zhang, Y.; Lu, J.J.; Huang, Z.X.; Feng, B. Modeling and hysteresis inverse compensation control of soft pneumatic gripper for gripping phosphorites. Actuators 2025, 14, 193. [Google Scholar] [CrossRef]
- Li, X.Q.; Hu, K.M.; Li, H.; Wang, B.; Xu, S.; He, Y.C. Adaptive hysteresis compenstion control of a macro-fiber composite bimorph by improved rein forcement learning. J. Intel. Mat. Syst. Str. 2024, 35, 1471–1482. [Google Scholar] [CrossRef]
- Zhou, J.L.; Dong, L.H.; Yang, W.D. Hysteresis Compensation for a Piezoelectric Actuator of Active Helicopter Rotor Using Compound Control. Micromachines 2021, 12, 1298. [Google Scholar] [CrossRef] [PubMed]
- Sun, W. Research on Real-Time Tuning of PID Parameters Based on Fuzzy Control. In Proceedings of the IEEE 2nd International Conference on Image Processing and Computer Applications, Shenyang, China, 28–30 June 2024. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Preload (N) | 1400 |
| Dimensions (mm) | 155 × 55 × 10 |
| Maximum displacement (mm) | 0.58 |
| Mass (g) | 242.6 |
| Blocking force (N) | 447 |
| Stiffness (N/mm) | 768.6 |
| Resonance frequency (Hz) | 566.4 |
| Source | Piezomechanik Gmbh Company |
|---|---|
| Type | Hard |
| Dimensions (mm) | 18 × 10.1 × 10.1 |
| d33 (pm/V) | 635 |
| Mechanical quality factor | 70 |
| Parameter | Value |
|---|---|
| m (kg) | 0.0607 |
| b (N·s·m−1) | 1250 |
| k (N/m) | 7.68 × 105 |
| d (mm/V) | 2.98 × 10−6 |
| α | 0.469 |
| β | 0.114 |
| γ | 0.01 |
| e | NB | NM | NS | ZO | PS | PM | PB | |
|---|---|---|---|---|---|---|---|---|
| ec | ||||||||
| NB | PB | PB | PM | PM | PS | ZO | ZO | |
| NM | PB | PB | PM | PS | PS | ZO | NS | |
| NS | PM | PM | PM | PS | ZO | NS | NS | |
| ZO | PM | PM | PS | ZO | NS | NM | NM | |
| PS | PS | PS | ZO | NS | NS | NM | NM | |
| PM | PS | ZO | NS | NM | NM | NM | NB | |
| PB | ZO | ZO | NM | NM | NM | NB | NB | |
| e | NB | NM | NS | ZO | PS | PM | PB | |
|---|---|---|---|---|---|---|---|---|
| ec | ||||||||
| NB | NB | NB | NM | NM | NS | ZO | ZO | |
| NM | NB | NB | NM | NS | NS | ZO | ZO | |
| NS | NB | NM | NS | NS | ZO | PS | PS | |
| ZO | NM | NM | NS | NS | ZO | PS | PS | |
| PS | NM | NS | ZO | PS | PS | PB | PB | |
| PM | ZO | ZO | PS | PS | PM | PB | PB | |
| PB | ZO | ZO | PS | PM | PM | PB | PB | |
| e | NB | NM | NS | ZO | PS | PM | PB | |
|---|---|---|---|---|---|---|---|---|
| ec | ||||||||
| NB | PS | NS | NB | NB | NM | NM | PS | |
| NM | PS | NS | NB | NM | NM | NS | ZO | |
| NS | ZO | NS | NM | NM | NS | NS | ZO | |
| ZO | ZO | NS | NS | NS | NS | NS | ZO | |
| PS | ZO | ZO | ZO | ZO | ZO | ZO | ZO | |
| PM | PB | NS | PS | PS | PS | PS | PB | |
| PB | PB | PM | PM | PM | PS | PS | PB | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gu, X.; Yang, W.; Dong, L.; Zhou, J. Investigation of Hysteresis Phenomena and Compensation in Piezoelectric Stacks for Active Rotor. Actuators 2025, 14, 327. https://doi.org/10.3390/act14070327
Gu X, Yang W, Dong L, Zhou J. Investigation of Hysteresis Phenomena and Compensation in Piezoelectric Stacks for Active Rotor. Actuators. 2025; 14(7):327. https://doi.org/10.3390/act14070327
Chicago/Turabian StyleGu, Xiancheng, Weidong Yang, Linghua Dong, and Jinlong Zhou. 2025. "Investigation of Hysteresis Phenomena and Compensation in Piezoelectric Stacks for Active Rotor" Actuators 14, no. 7: 327. https://doi.org/10.3390/act14070327
APA StyleGu, X., Yang, W., Dong, L., & Zhou, J. (2025). Investigation of Hysteresis Phenomena and Compensation in Piezoelectric Stacks for Active Rotor. Actuators, 14(7), 327. https://doi.org/10.3390/act14070327