
Research on Active Disturbance Rejection Control of Rigid–Flexible Coupled Constant Force Actuator


Abstract
1. Introduction
- Decoupled Rigid–Flexible Actuator Design: A hybrid rigid–flexible coupled structure employs compliant hinges to reduce contact stiffness by three orders of magnitude. This enables force regulation via millimeter-scale elastic deformation instead of micron-level positioning, inherently attenuating high-frequency disturbances while reducing displacement sensitivity.
- ADRC-ESO Co-Design for Robust Force Control: Tight integration of Active Disturbance Rejection Control (ADRC) with the compliant actuator facilitates real-time estimation and compensation of dynamic disturbances (e.g., friction hysteresis, workpiece vibrations) through an Extended State Observer (ESO), eliminating dependency on precise system models. This co-design bridges mechanical compliance with control sophistication, achieving simultaneous high-precision motion and disturbance-robust force regulation.
2. Rigid–Flexible Coupled Constant Force Actuator: Principle and Advantages
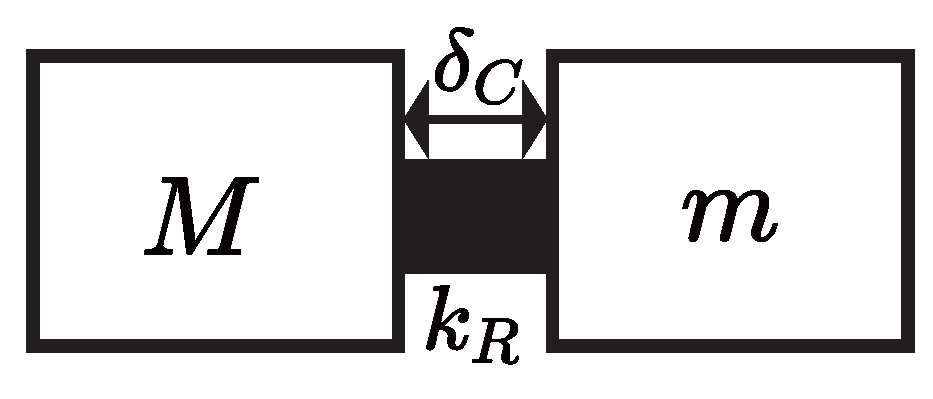
2.1. Limitations of Traditional Rigid Contact Models
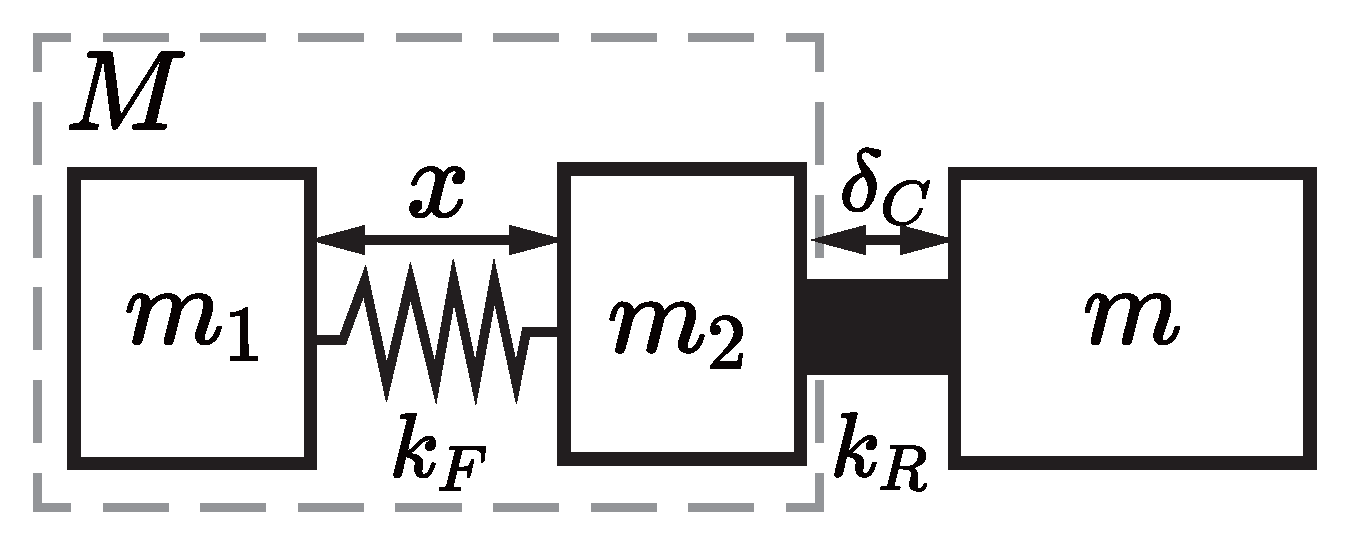
2.2. Structural Innovation: Decoupling via Flexible Interfaces
2.3. Key Performance Advantages
2.3.1. Reduced Force–Displacement Sensitivity
2.3.2. Enhanced Disturbance Rejection Capability
2.3.3. Facilitation of Control Strategy Implementation
3. Control System Implementation and Comparative Analysis
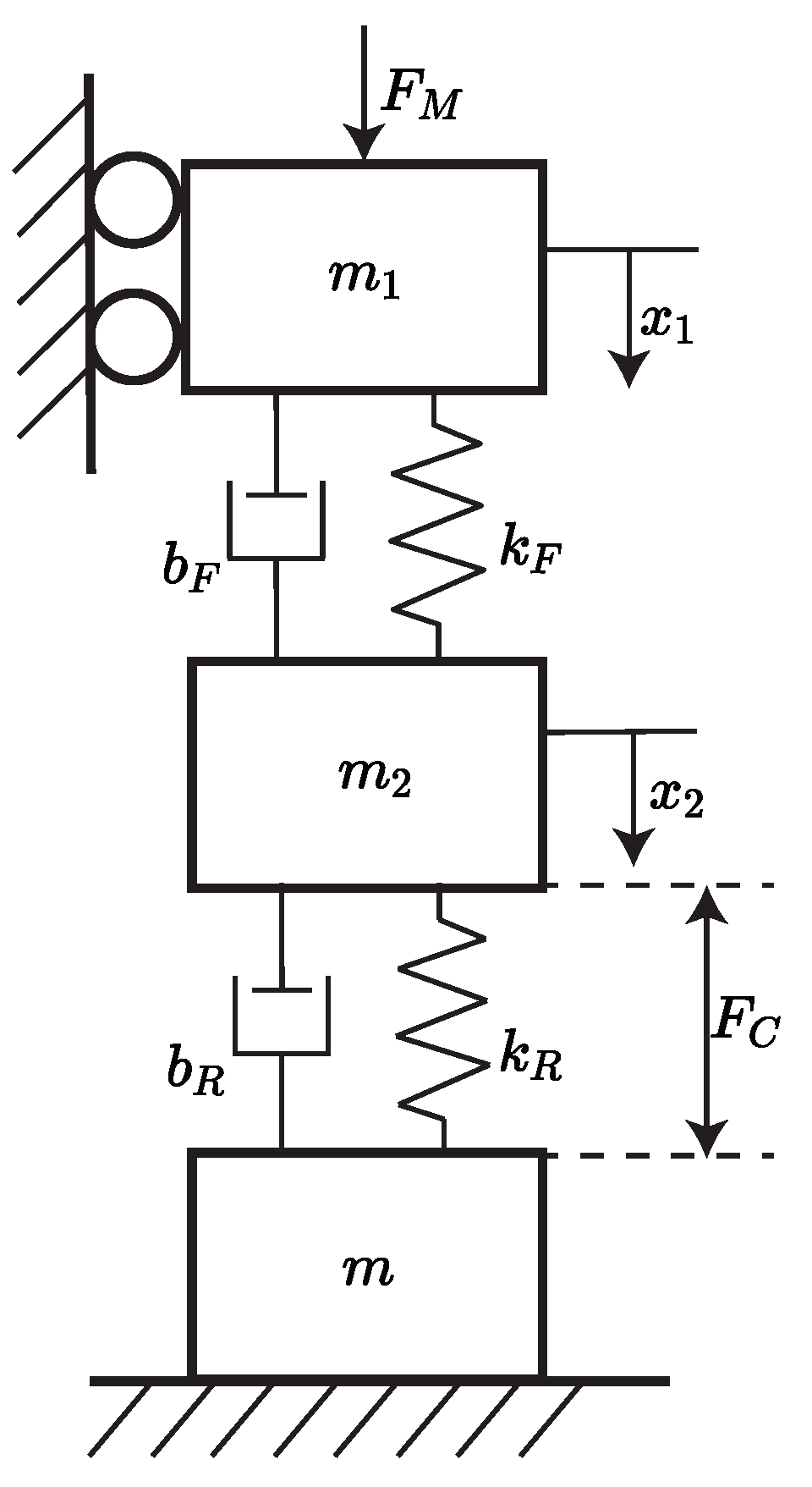
3.1. Dynamic Modeling of Rigid–Flexible Coupled Constant-Force Mechanism
3.2. PID-Based Constant-Force Control System Design
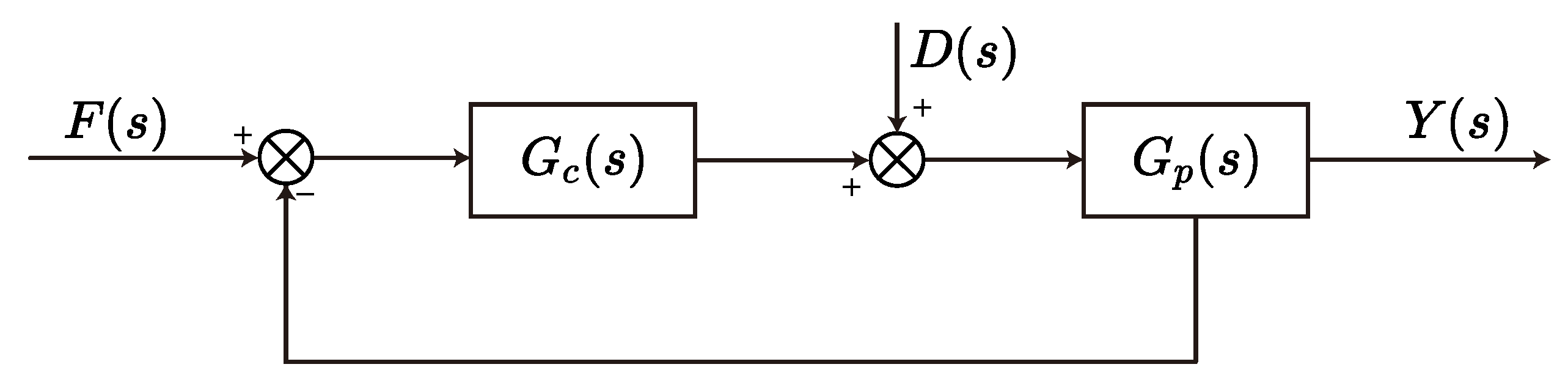
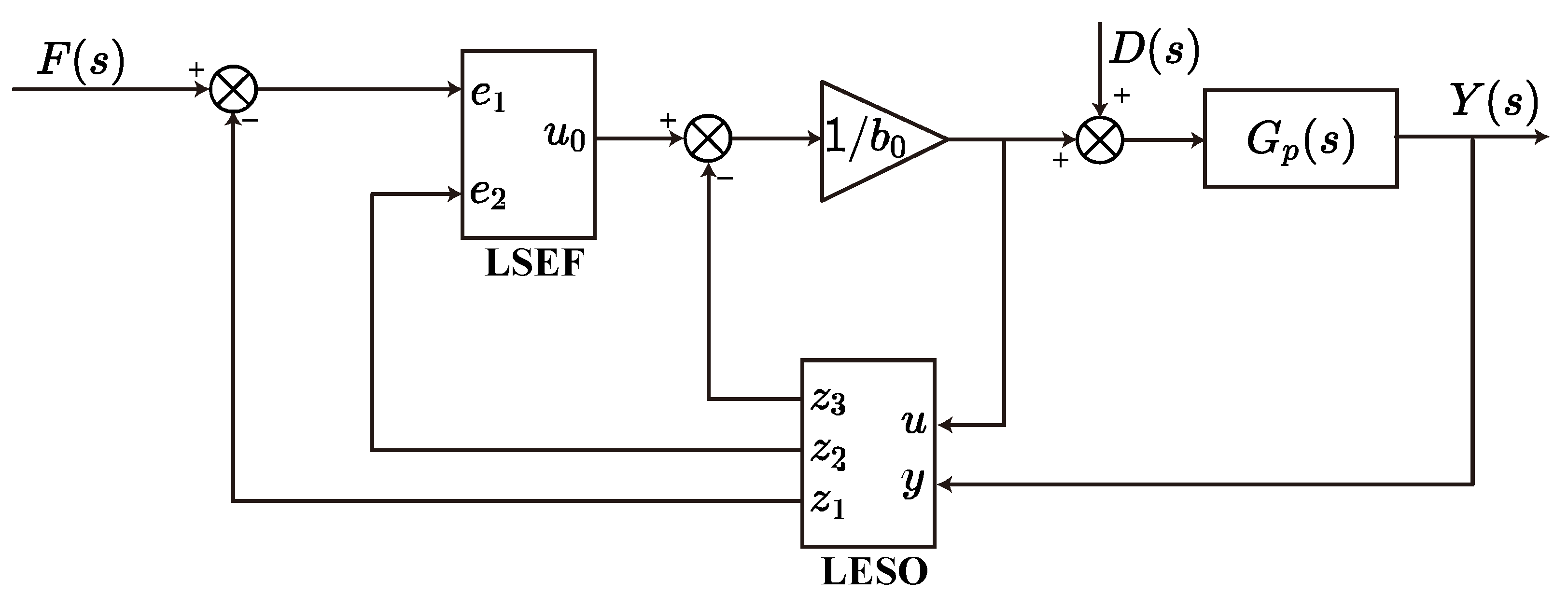
3.3. ADRC-Based Constant-Force Control System Design
3.4. Controller Parameter Configuration
- Controller bandwidth: Set rad/s to ensure rapid transient response.
- Observer bandwidth: Define rad/s for disturbance estimation.
- Feedback gains: Calculate and to stabilize the closed-loop dynamics.
- Control gain: The parameter represents the designer’s estimate of the plant’s input gain b in (15). Its accurate selection is critical for ESO performance and closed-loop stability, as directly scales the disturbance compensation in the control law. Underestimation () causes sluggish disturbance rejection; overestimation () induces instability through overcompensation. We employ the following systematic tuning procedure: First, initialize at 50–70% of the nominal gain value derived from (23). Then, monotonically increase while observing the system’s step response. For the system in (26), is set to ensure both fast disturbance rejection and closed-loop stability.
- ESO parameters: Determine observer gains as , , and to ensure accurate state and disturbance estimation.
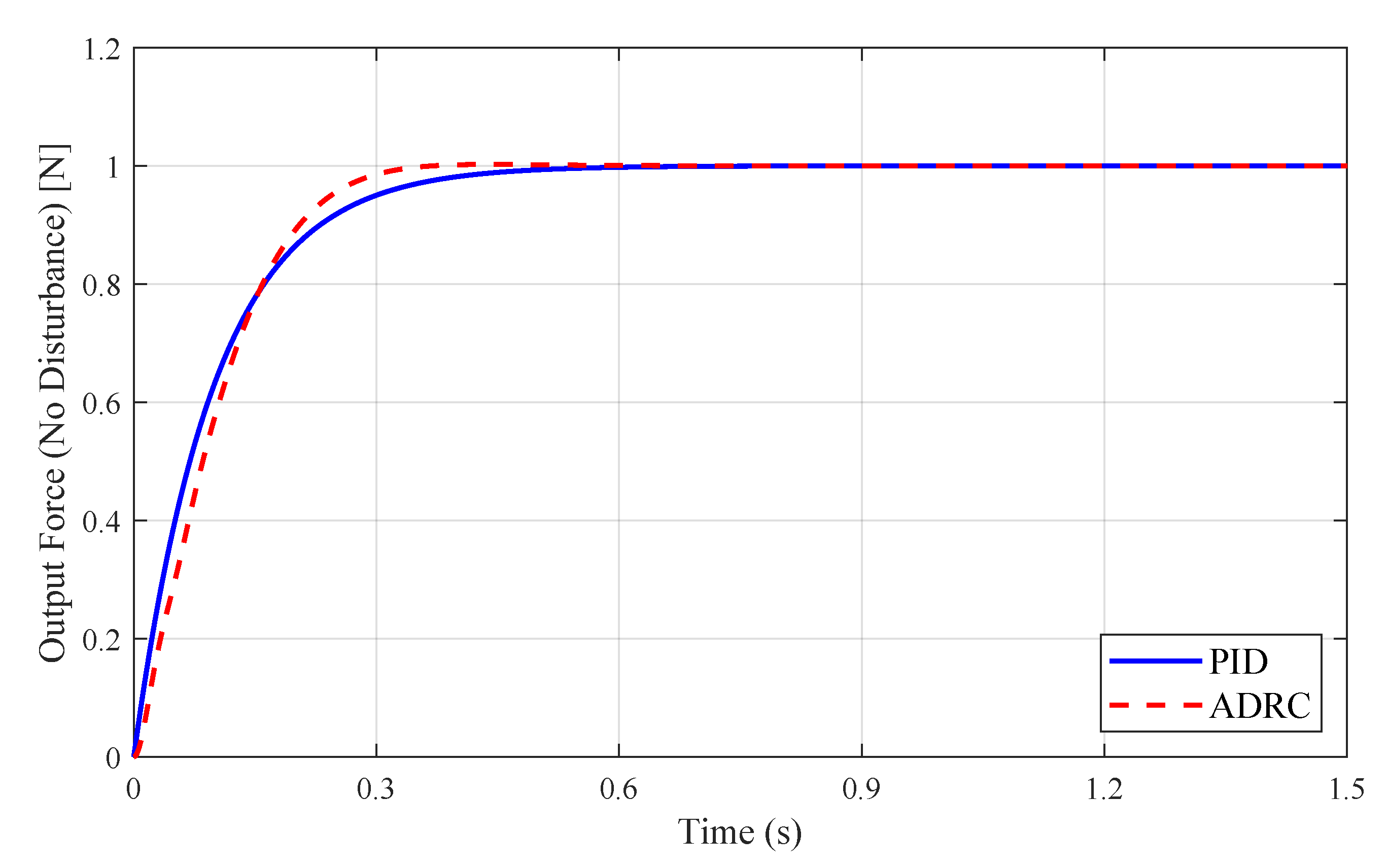
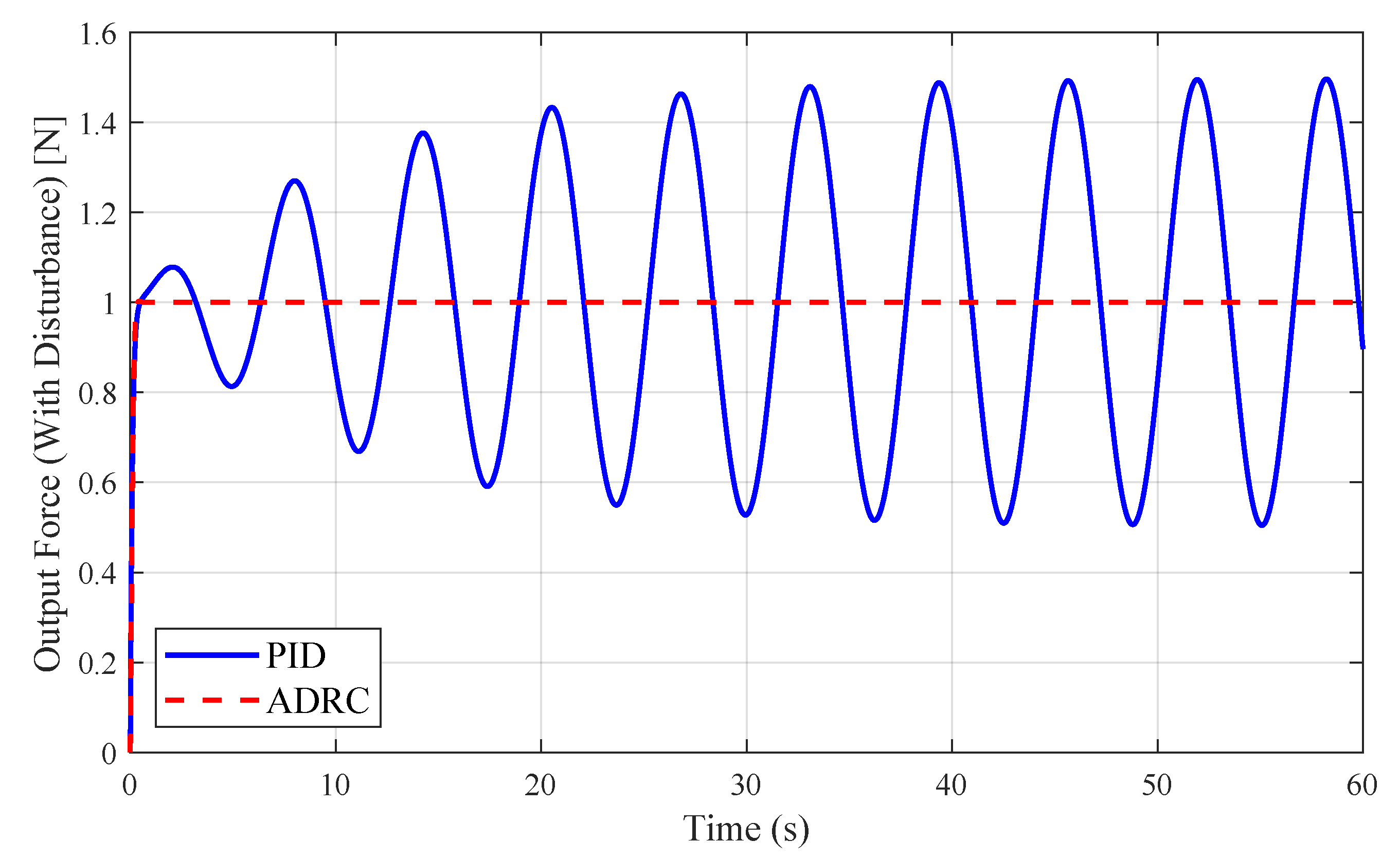
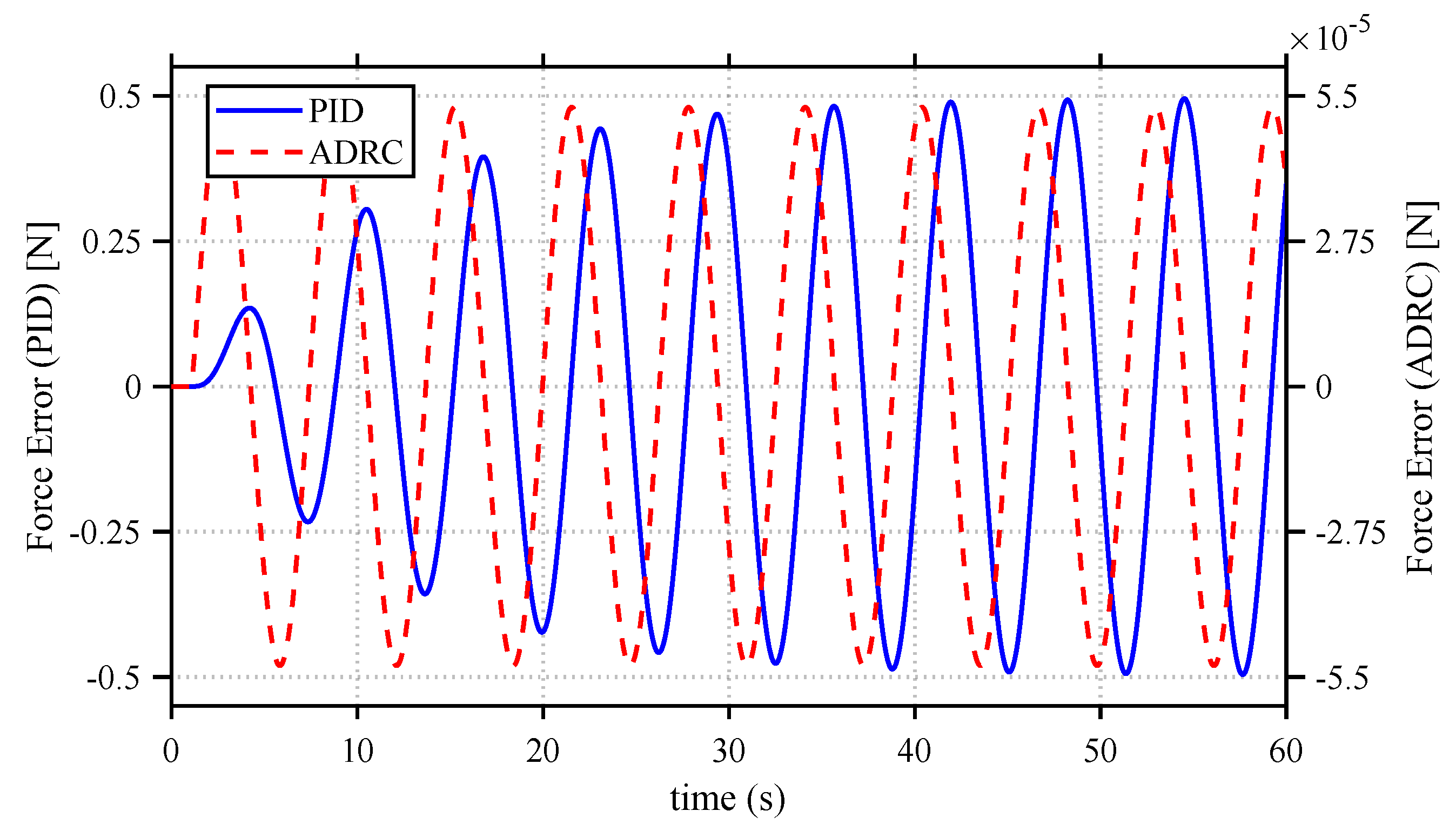
3.5. Comparative Analysis of PID and ADRC in Constant-Force Control
4. Experiment
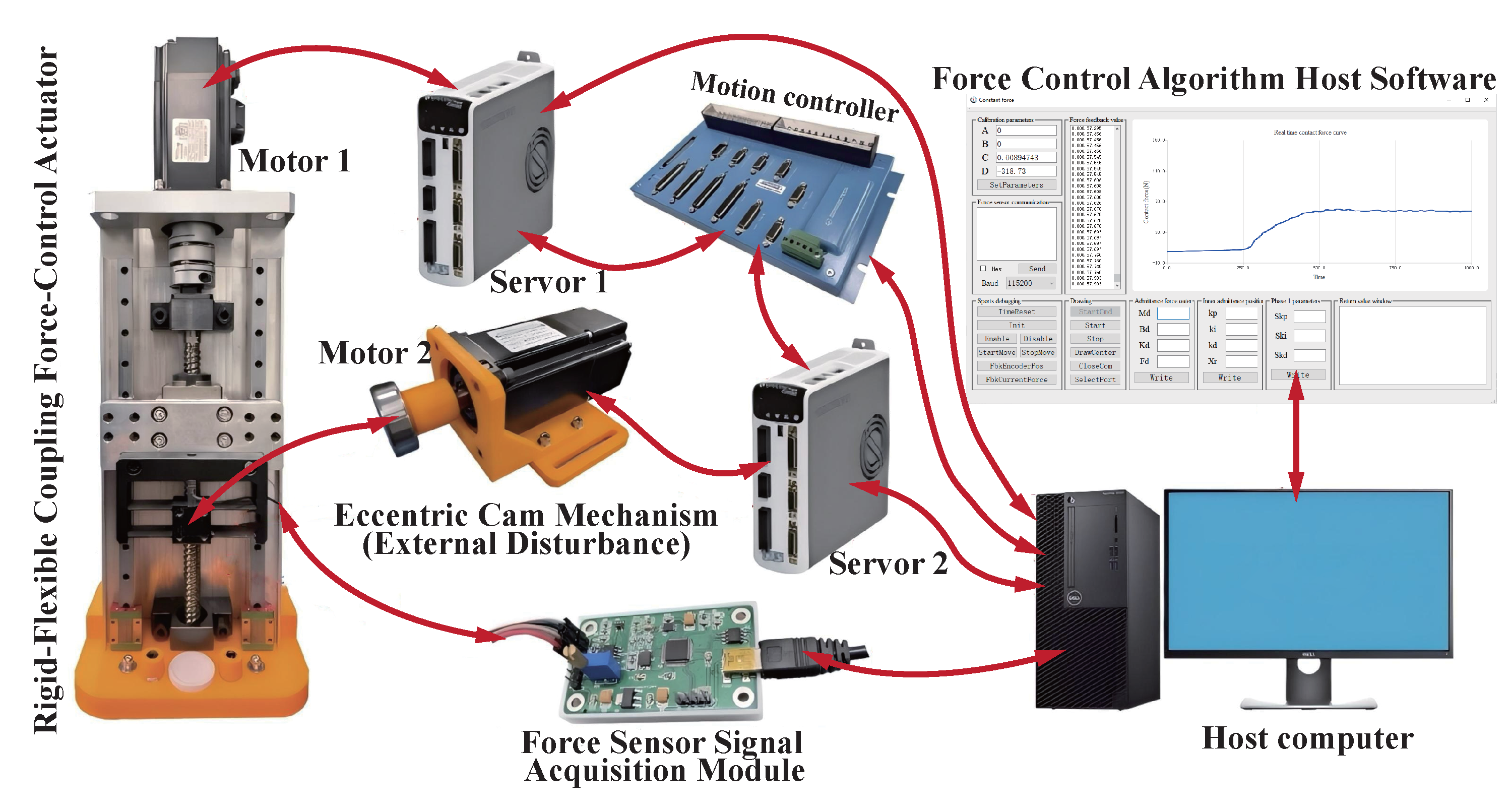
4.1. Experimental Prototype Composition
- Rigid–Flexible Coupled Force Control Actuator: The actuator consists of a rigid frame, four parallel leaf-spring flexure hinges, a flexible working stage, and an SBT630B-10Kg force sensor. The inflexible framework, linked to a servo motor-operated ball screw mechanism, facilitates extensive displacement, whereas the adaptable working stage produces the requisite output force. The flexure hinges, constructed from 7075-T6 aluminum alloy (Young’s modulus ), utilize a corner-fillet leaf-spring configuration with dimensions , , , and (Figure 11). The stiffness of each individual hinge is determined to be . The overall stiffness of the actuator () is the sum of the contributions from four hinges () and the force sensor (), resulting in . This guarantees that the actuator functions within the elastic deformation range, even at the maximum safe deformation () of the force sensor, which corresponds to a force capacity of .
- Eccentric Cam Mechanism: As illustrated in Figure 12 and Figure 13, a servo motor actuates an eccentric cam to produce periodic sinusoidal perturbations. The cam rotates at 30 r/min, generating a vertical displacement amplitude of 2 mm, which results in a cyclic perturbation force exerted on the flexible working stage. This configuration replicates the external disturbances examined in the simulation (Section 3).
- Real-Time Control system: The experimental platform employs a custom-developed force sensor signal acquisition module communicating via USB and a motion control card (GTS-400-PG-VB, GoogolTech. Inc., China) interfaced directly through the host PC’s PCIe slot. Both components achieve direct hardware-level real-time communication with the dedicated host software, maximizing control loop determinism as depicted in Figure 9. Discrete-time formulations of both PID and ADRC controllers are directly implemented within the host software. The force acquisition module conditions the sensor’s differential signal through hardware-based amplification and filtering circuitry. An onboard ADC converts this analog signal, which is then processed by the microcontroller incorporating an FIR filter before transmission as a digital contact force value to the host PC. This design, utilizing exclusively digital signals for communication beyond the acquisition unit, significantly mitigates external noise interference on the critical force feedback.
4.2. Experimental Test Conditions
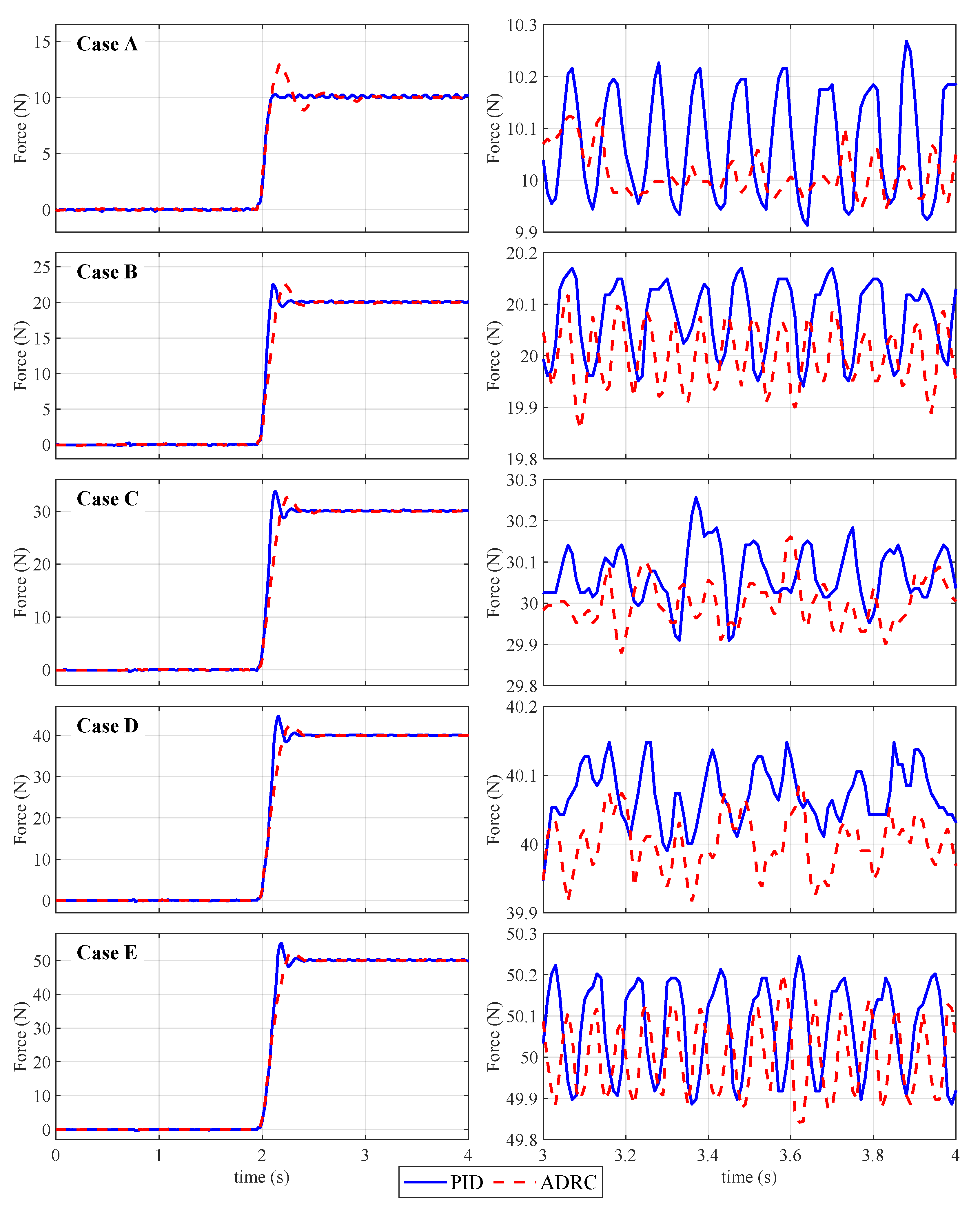
- Disturbance-Free Case: The eccentric cam mechanism shown in Figure 12 is deactivated. Step force commands (Cases A-E: 10 N, 20 N, 30 N, 40 N, and 50 N) are sequentially applied to the actuator. Steady-state force tracking errors and response times are recorded for both PID and ADRC strategies.
- Disturbance-Induced Case: The eccentric cam mechanism is activated to impose a sinusoidal disturbance force (Figure 13) while maintaining the same step force commands (Cases A–E). The controllers’ability to reject disturbances and maintain stable force output is quantified by analyzing force fluctuation amplitudes and recovery times. All experiments are repeated three times to ensure statistical reliability.
4.3. Experimental Implementation
4.4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Meng, X.; Wang, Y.; Yin, X.; Fu, H.; Sun, S.; Sun, Y. Investigation of Force-Controlled Polishing of Complex Curved PMMA Parts on a Machining Center. Machines 2024, 12, 259. [Google Scholar] [CrossRef]
- Tan, Q.; Basri, M.A.M.; Wang, J. Constant Force Control and Trajectory Planning of Multi-Axis Polishing Machine Using Active Disturbance Rejection Control and B-spline Curve Algorithm. IEEE Access 2024, 12, 99851–99871. [Google Scholar] [CrossRef]
- Dai, J.; Chen, C.Y.; Zhu, R.; Yang, G.; Wang, C.; Bai, S. Suppress Vibration on Robotic Polishing with Impedance Matching. Actuators 2021, 10, 59. [Google Scholar] [CrossRef]
- Zhu, Z.; Zhang, H.; Liu, G.; Zhang, D. Adaptive Variable Impedance Force/Position Hybrid Control for Large Surface Polishing. Ind. Robot. Int. J. Robot. Res. Appl. 2024, 51, 747–760. [Google Scholar] [CrossRef]
- Oh, S.; Kong, K. High-Precision Robust Force Control of a Series Elastic Actuator. IEEE/ASME Trans. Mechatron. 2017, 22, 71–80. [Google Scholar] [CrossRef]
- Chen, H.; Yang, J.; Ding, H. Robotic Compliant Grinding of Curved Parts Based on a Designed Active Force-Controlled End-Effector with Optimized Series Elastic Component. Robot. Comput.-Integr. Manuf. 2023, 86, 102646. [Google Scholar] [CrossRef]
- Zeng, F.; Xiao, J.; Liu, H. Force/Torque Sensorless Compliant Control Strategy for Assembly Tasks Using a 6-DOF Collaborative Robot. IEEE Access 2019, 7, 108795–108805. [Google Scholar] [CrossRef]
- Hameed, A.; Ordys, A.; Możaryn, J.; Sibilska-Mroziewicz, A. Control System Design and Methods for Collaborative Robots: Review. Appl. Sci. 2023, 13, 675. [Google Scholar] [CrossRef]
- Du, W.; Fnadi, M.; Benamar, F. Rolling Based Locomotion on Rough Terrain for a Wheeled Quadruped Using Centroidal Dynamics. Mech. Mach. Theory 2020, 153, 103984. [Google Scholar] [CrossRef]
- Li, C.; Zhang, F.; Guo, J.; Yang, J.; Ji, Y.; Cui, J.; Fan, W.; Gang, X. Coupling Control Theory and Bench Test of Body Attitude and Wheel Reaction Force for Multi-Axle Vehicles in 3D off-Road Terrain. Int. J. Automot. Technol. 2025, 26. [Google Scholar] [CrossRef]
- Xu, K.; Wang, S.; Shi, L.; Li, J.; Yue, B. Horizon-Stability Control for Wheel-Legged Robot Driving over Unknow, Rough Terrain. Mech. Mach. Theory 2025, 205, 105887. [Google Scholar] [CrossRef]
- Lopes, A.; Almeida, F. A Force–Impedance Controlled Industrial Robot Using an Active Robotic Auxiliary Device. Robot. Comput.-Integr. Manuf. 2008, 24, 299–309. [Google Scholar] [CrossRef]
- Zeng, X.; Zhu, G.; Gao, Z.; Ji, R.; Ansari, J.; Lu, C. Surface Polishing by Industrial Robots: A Review. Int. J. Adv. Manuf. Technol. 2023, 125, 3981–4012. [Google Scholar] [CrossRef]
- Yang, J.; Chen, H.; Qi, R.; Ding, H.; Yin, Y. A Novel Approach to Robotic Grinding Guaranteeing Profile Accuracy Using Rigid-Flexible Coupling Force Control for Free-Formed Surfaces. CIRP Ann. 2023, 72, 313–316. [Google Scholar] [CrossRef]
- Cao, H.; Chen, X.; He, Y.; Zhao, X. Dynamic Adaptive Hybrid Impedance Control for Dynamic Contact Force Tracking in Uncertain Environments. IEEE Access 2019, 7, 83162–83174. [Google Scholar] [CrossRef]
- Zhang, G.; Yang, G.; Deng, Y.; Chen, C.; Zhu, R.; Yang, K. Modeling and Force Control of a Pneumoelectric End-Effector for Robotic Continuous Contact Operations. Int. J. Adv. Manuf. Technol. 2022, 121, 1219–1234. [Google Scholar] [CrossRef]
- Dai, S.; Huang, C.; Yang, Y.; Ji, W.; Wang, X.; Jiang, D.; Ning, H. A Polishing Force Control Strategy for Robot Pneumatic End-Effector Based on Adaptive Sliding Mode Backstepping Algorithm. Int. J. Adv. Manuf. Technol. 2024, 133, 3383–3397. [Google Scholar] [CrossRef]
- Mohammad, A.E.K.; Hong, J.; Wang, D.; Guan, Y. Synergistic Integrated Design of an Electrochemical Mechanical Polishing End-Effector for Robotic Polishing Applications. Robot. Comput.-Integr. Manuf. 2019, 55, 65–75. [Google Scholar] [CrossRef]
- Li, J.; Guan, Y.; Chen, H.; Wang, B.; Zhang, T.; Liu, X.; Hong, J.; Wang, D.; Zhang, H. A High-Bandwidth End-Effector with Active Force Control for Robotic Polishing. IEEE Access 2020, 8, 169122–169135. [Google Scholar] [CrossRef]
- Ma, Z.; Hong, G.S.; Ang, M.H.; Poo, A.N. Design and Control of an End-Effector Module for Industrial Finishing Applications. In Proceedings of the 2016 IEEE International Conference on Advanced Intelligent Mechatronics (AIM), Banff, AB, Canada, 12–15 July 2016; pp. 339–344. [Google Scholar] [CrossRef]
- Zhu, R.; Yang, G.; Fang, Z.; Yang, M.; Chen, C.Y.; Zhang, C. Kinematic Design of a 3-DOF Force-Controlled End-Effector with Flexure Joints for Robotic Finishing Applications. In Proceedings of the 2019 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Hong Kong, China, 8–12 July 2019; pp. 1473–1478. [Google Scholar] [CrossRef]
- Haddadin, S.; Shahriari, E. Unified Force-Impedance Control. Int. J. Robot. Res. 2024, 43, 2112–2141. [Google Scholar] [CrossRef]
- Wei, Y.; Xu, Q. Design of a New Robot End-Effector Based on Compliant Constant-Force Mechanism. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September–1 October 2021; pp. 7601–7606. [Google Scholar] [CrossRef]
- Zhang, J.; Zhao, L.; Li, L.; Ma, F.; Chen, G. Design of Passive Constant-Force End-Effector for Robotic Polishing of Optical Reflective Mirrors. Chin. J. Mech. Eng. 2022, 35, 141. [Google Scholar] [CrossRef]
- Ding, Y.; Zhao, J.; Min, X. Impedance Control and Parameter Optimization of Surface Polishing Robot Based on Reinforcement Learning. Proc. Inst. Mech. Eng. Part B J. Eng. Manuf. 2023, 237, 216–228. [Google Scholar] [CrossRef]
- Ott, C.; Mukherjee, R.; Nakamura, Y. A Hybrid System Framework for Unified Impedance and Admittance Control. J. Intell. Robot. Syst. 2014, 78, 359–375. [Google Scholar] [CrossRef]
- Schumacher, M.; Wojtusch, J.; Beckerle, P.; von Stryk, O. An Introductory Review of Active Compliant Control. Robot. Auton. Syst. 2019, 119, 185–200. [Google Scholar] [CrossRef]
- Lew, J. Contact Control of Flexible Micro/Macro-Manipulators. In Proceedings of the International Conference on Robotics and Automation, Albuquerque, NM, USA, 25–25 April 1997; Volume 4, pp. 2850–2855. [Google Scholar] [CrossRef]
- Zhou, H.; Ma, S.; Wang, G.; Deng, Y.; Liu, Z. A Hybrid Control Strategy for Grinding and Polishing Robot Based on Adaptive Impedance Control. Adv. Mech. Eng. 2021, 13, 168781402110040. [Google Scholar] [CrossRef]
- Raibert, M.H.; Craig, J.J. Hybrid Position/Force Control of Manipulators. J. Dyn. Syst. Meas. Control 1981, 103, 126–133. [Google Scholar] [CrossRef]
- Bone, G.; Elbestawi, M. Active End Effector Control of a Low Precision Robot in Deburring. Robot. Comput.-Integr. Manuf. 1991, 8, 87–96. [Google Scholar] [CrossRef]
- Whitney, D.E. Historical Perspective and State of the Art in Robot Force Control. Int. J. Robot. Res. 1987, 6, 3–14. [Google Scholar] [CrossRef]
- Lu, Z.; Kawamura, S.; Goldenberg, A. Sliding Mode Impedance Control and Its Application to Grinding Tasks. In Proceedings of the IROS ’91:IEEE/RSJ International Workshop on Intelligent Robots and Systems ’91, Osaka, Japan, 3–5 November 1991; Volume 1, pp. 350–355. [Google Scholar] [CrossRef]
- Han, J. From PID to Active Disturbance Rejection Control. IEEE Trans. Ind. Electron. 2009, 56, 900–906. [Google Scholar] [CrossRef]
- Chen, Y.H.; Lan, C.C. An Adjustable Constant-Force Mechanism for Adaptive End-Effector Operations. J. Mech. Des. 2012, 134, 031005. [Google Scholar] [CrossRef]
- Zhang, X.; Fu, Z.; Wang, G. Design and Development of a Novel 3-DOF Parallel Robotic Polishing End-Effector. In Proceedings of the 2021 6th IEEE International Conference on Advanced Robotics and Mechatronics (ICARM), Chongqing, China, 3–5 July 2021; pp. 352–357. [Google Scholar] [CrossRef]
- Gao, Z. Scaling and Bandwidth-Parameterization Based Controller Tuning. In Proceedings of the 2003 American Control Conference, Denver, CO, USA, 4–6 June 2003; Volume 6, pp. 4989–4996. [Google Scholar] [CrossRef]
- Wu, C.; Guo, K.; Sun, J. Dual PID Adaptive Variable Impedance Constant Force Control for Grinding Robot. Appl. Sci. 2023, 13, 11635. [Google Scholar] [CrossRef]
- Liu, M.; Zhang, F.; He, L.; Shang, M. Dynamic Neural Network for Motion/Force Control of Manipulators with Polynomial Noises. IEEE Trans. Ind. Electron. 2024, 71, 12559–12569. [Google Scholar] [CrossRef]
- Chen, F.; Zhao, H.; Li, D.; Chen, L.; Tan, C.; Ding, H. Contact Force Control and Vibration Suppression in Robotic Polishing with a Smart End Effector. Robot. Comput.-Integr. Manuf. 2019, 57, 391–403. [Google Scholar] [CrossRef]
- Wei, Y.; Xu, Q. Design of a New Passive End-Effector Based on Constant-Force Mechanism for Robotic Polishing. Robot. Comput.-Integr. Manuf. 2022, 74, 102278. [Google Scholar] [CrossRef]
- Li, R.; Yang, Z.; Cai, B.; Chen, G.; Wu, B.; Wei, Y. A Compliant Guiding Mechanism Utilizing Orthogonally Oriented Flexures with Enhanced Stiffness in Degrees-of-Constraint. Mech. Mach. Theory 2022, 167, 104555. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cases | Controller | Disturbance-Free | Disturbance-Induced | ||||
|---|---|---|---|---|---|---|---|
|
Absolute
SSE (N) |
Relative
SSE |
Settling
Time (s) |
Absolute
SSE (N) |
Relative
SSE |
Settling
Time (s) | ||
| A (10 N) | PID | 0.25 | 2.50% | 0.24 | 5.40 | 54.00% | >5 |
| ADRC | 0.12 | 1.20% | 0.55 | 0.20 | 2.00% | 0.56 | |
| B (20 N) | PID | 0.18 | 0.90% | 0.40 | 4.80 | 24.00% | >5 |
| ADRC | 0.12 | 0.60% | 0.40 | 0.30 | 1.50% | 0.46 | |
| C (30 N) | PID | 0.26 | 0.87% | 0.32 | 4.50 | 15.00% | >5 |
| ADRC | 0.13 | 0.43% | 0.39 | 0.30 | 1.00% | 0.51 | |
| D (40 N) | PID | 0.22 | 0.55% | 0.40 | 4.72 | 11.80% | >5 |
| ADRC | 0.19 | 0.48% | 0.42 | 0.50 | 1.25% | 0.46 | |
| E (50 N) | PID | 0.25 | 0.50% | 0.43 | 5.10 | 10.20% | >5 |
| ADRC | 0.18 | 0.36% | 0.40 | 0.50 | 1.00% | 0.56 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, C.; Yang, Z.; Zheng, J.; Fu, B.; Bai, Y. Research on Active Disturbance Rejection Control of Rigid–Flexible Coupled Constant Force Actuator. Actuators 2025, 14, 325. https://doi.org/10.3390/act14070325
Jiang C, Yang Z, Zheng J, Fu B, Bai Y. Research on Active Disturbance Rejection Control of Rigid–Flexible Coupled Constant Force Actuator. Actuators. 2025; 14(7):325. https://doi.org/10.3390/act14070325
Chicago/Turabian StyleJiang, Chuanxing, Zhijun Yang, Jun Zheng, Bangshang Fu, and Youdun Bai. 2025. "Research on Active Disturbance Rejection Control of Rigid–Flexible Coupled Constant Force Actuator" Actuators 14, no. 7: 325. https://doi.org/10.3390/act14070325
APA StyleJiang, C., Yang, Z., Zheng, J., Fu, B., & Bai, Y. (2025). Research on Active Disturbance Rejection Control of Rigid–Flexible Coupled Constant Force Actuator. Actuators, 14(7), 325. https://doi.org/10.3390/act14070325