
Design and Test of a Magnetorheological Damper of a Multi-Layered Permanent Magnet

 ,
,
Abstract
1. Introduction
2. Damping Strategies for Vibration Attenuation
3. Design of MR Damper and Its Mechanical Properties Experiment
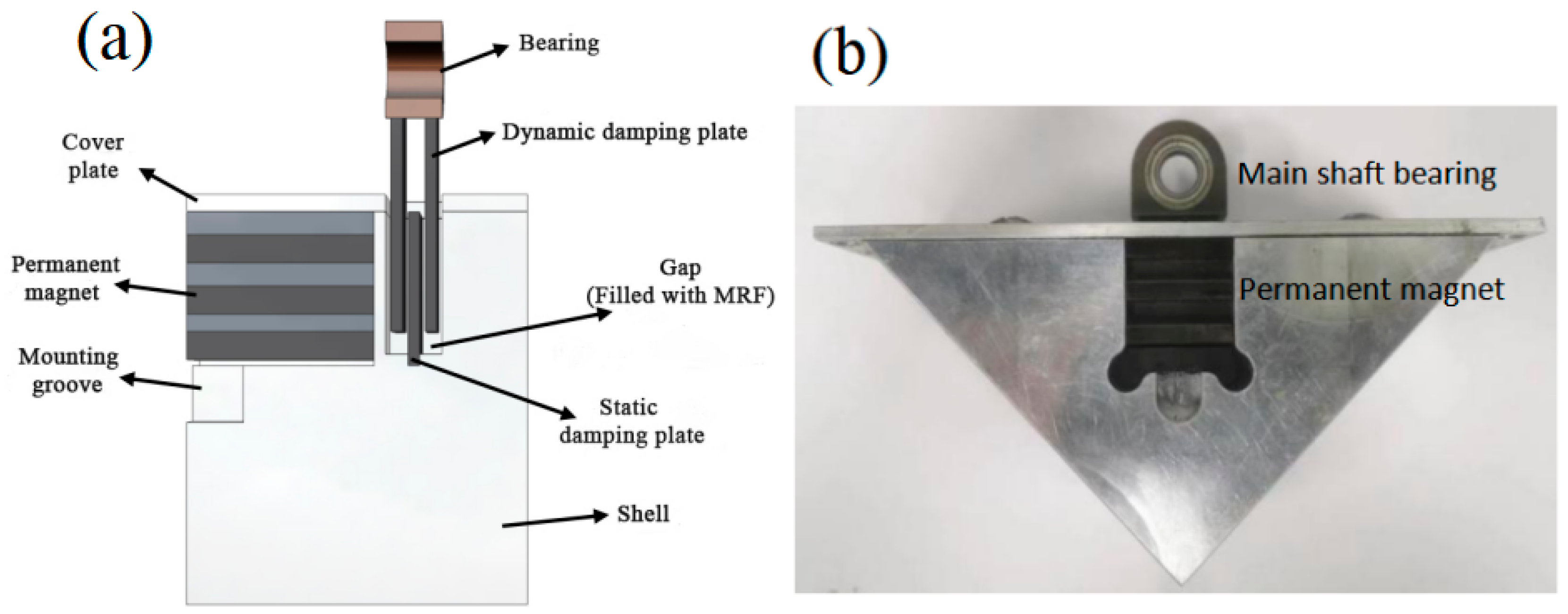
3.1. The Structure and Parameters of the MR Damper
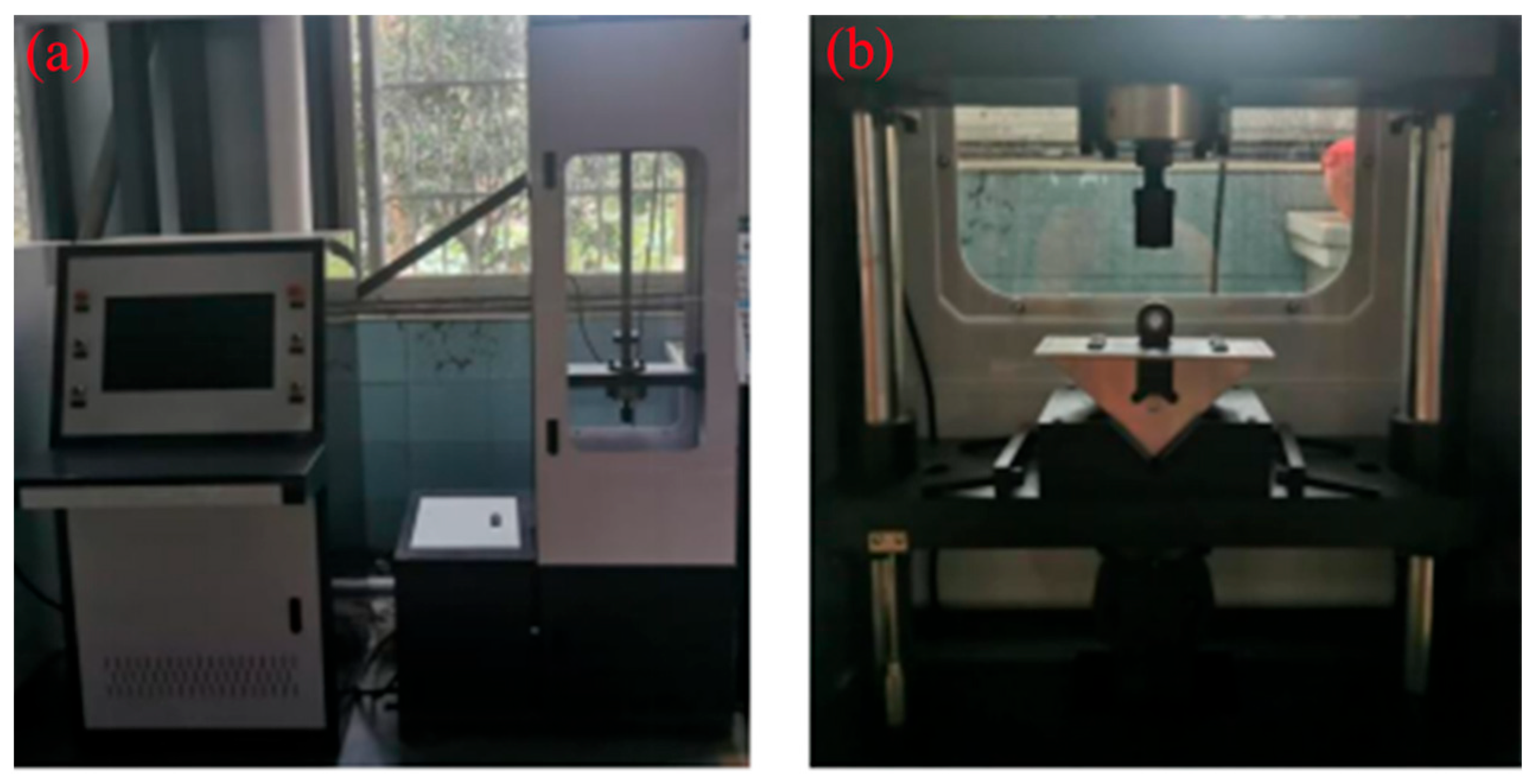
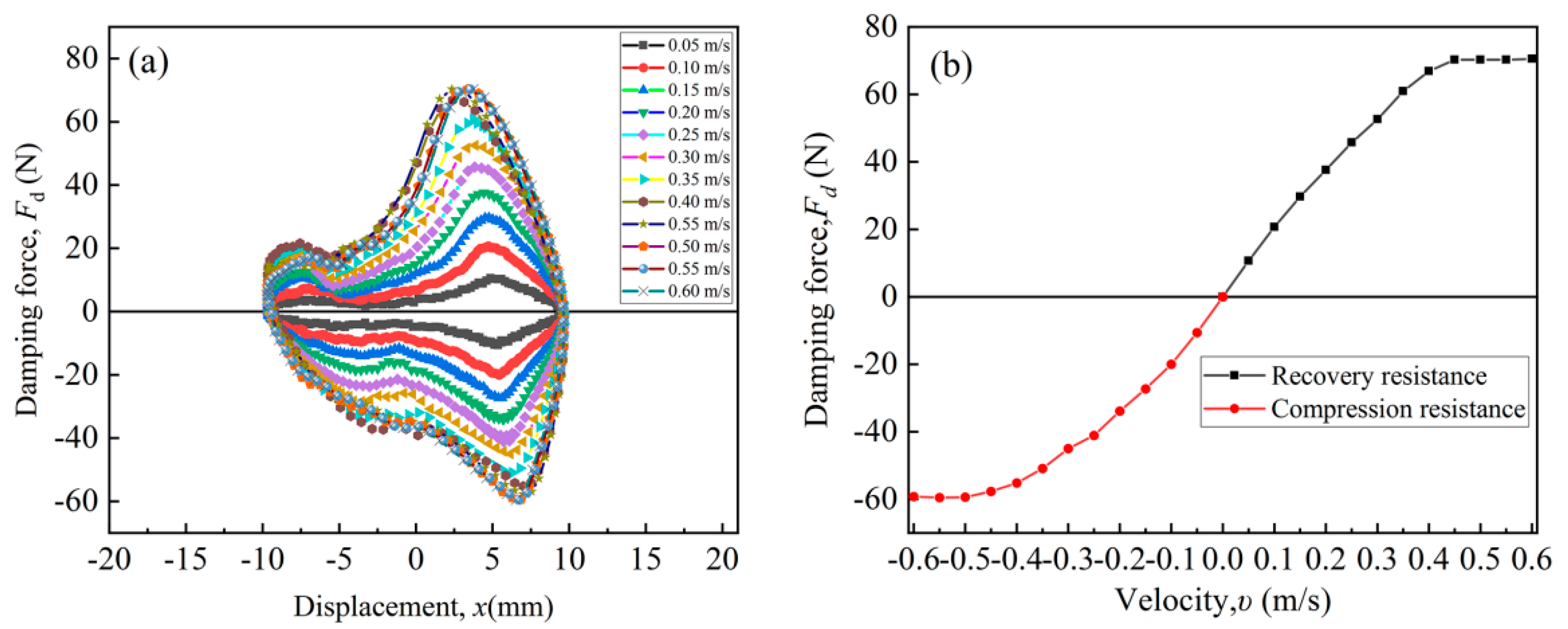
3.2. The Test and Calculation of Mechanical Properties of the MR Damper
3.3. Simulation and Experiment of Vibration Reduction System of MR Damper
3.3.1. Simulation of Vibration Reduction Effect of MR Damper
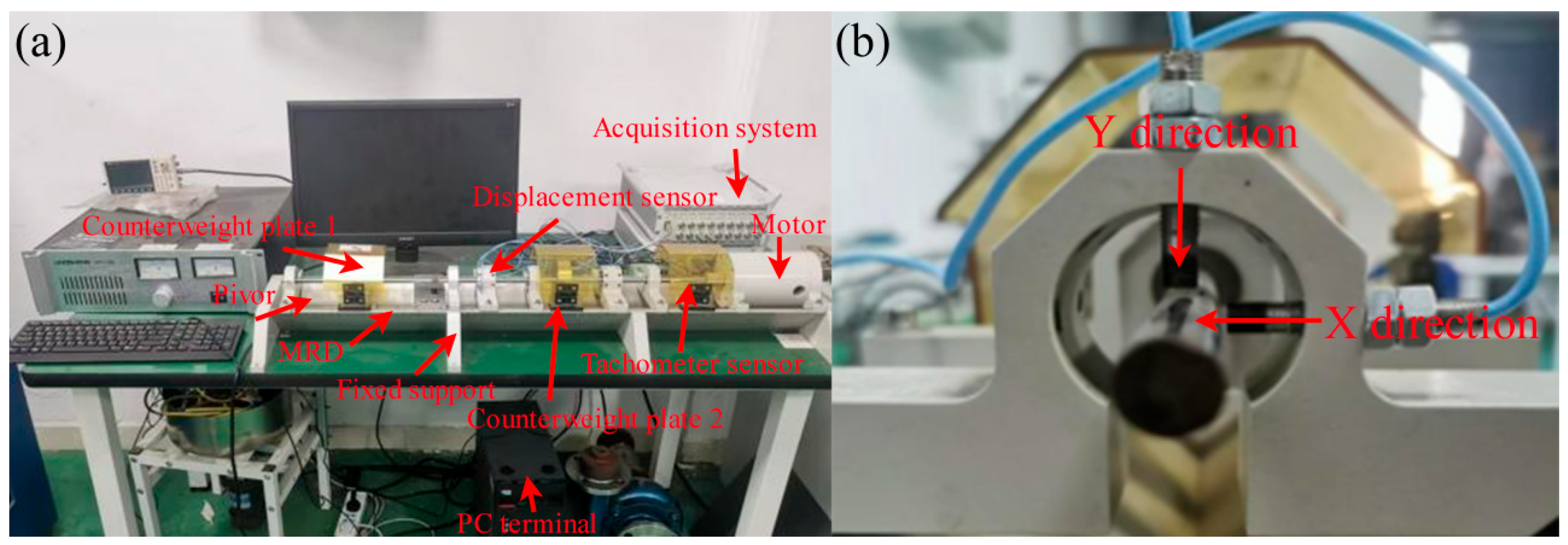
3.3.2. Experiment Procedures of Vibration Reduction Effect of MR Damper
4. Simulation and Experiment of Vibration Reduction Effect of Rotor System
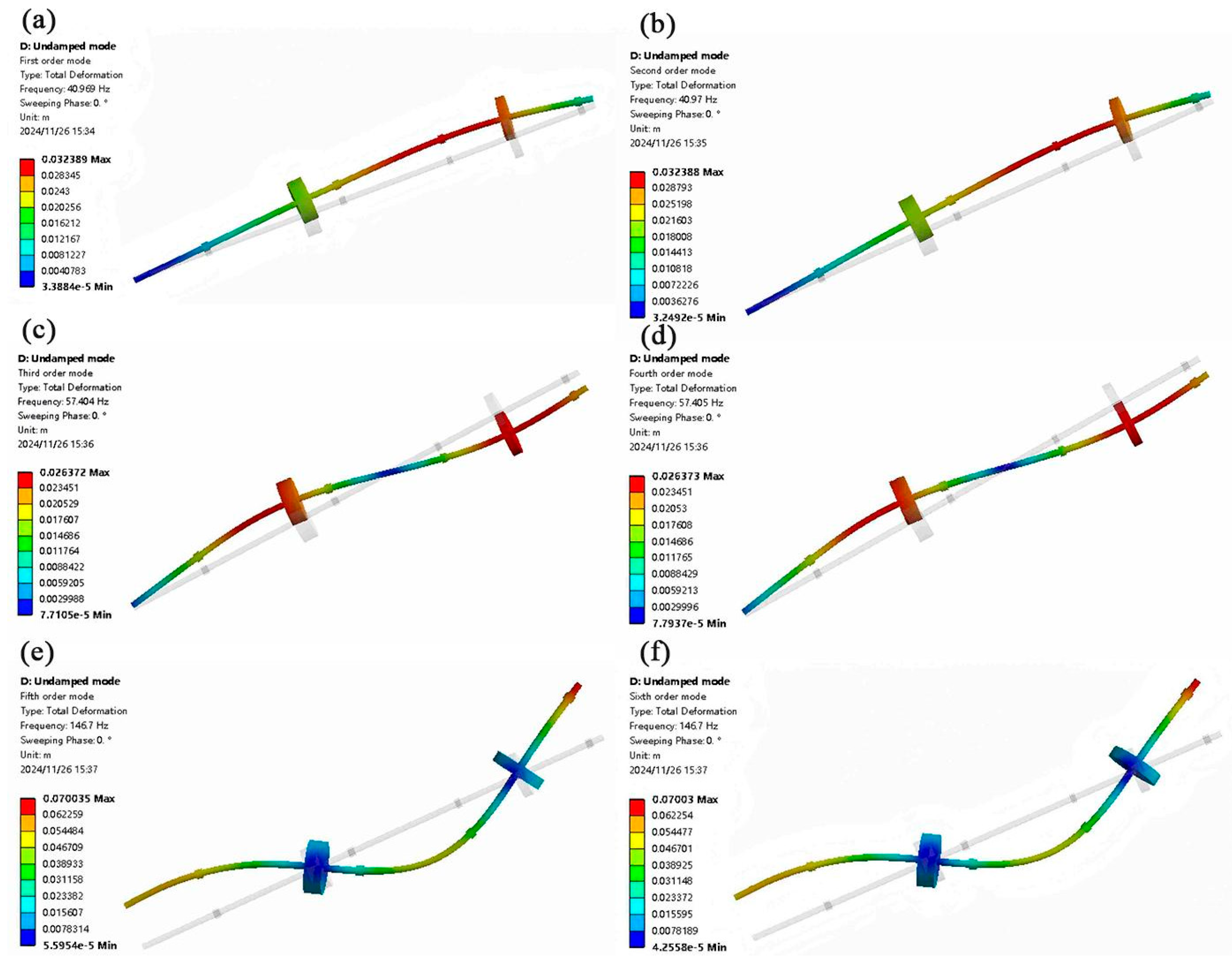
4.1. The Analysis of Simulation Results
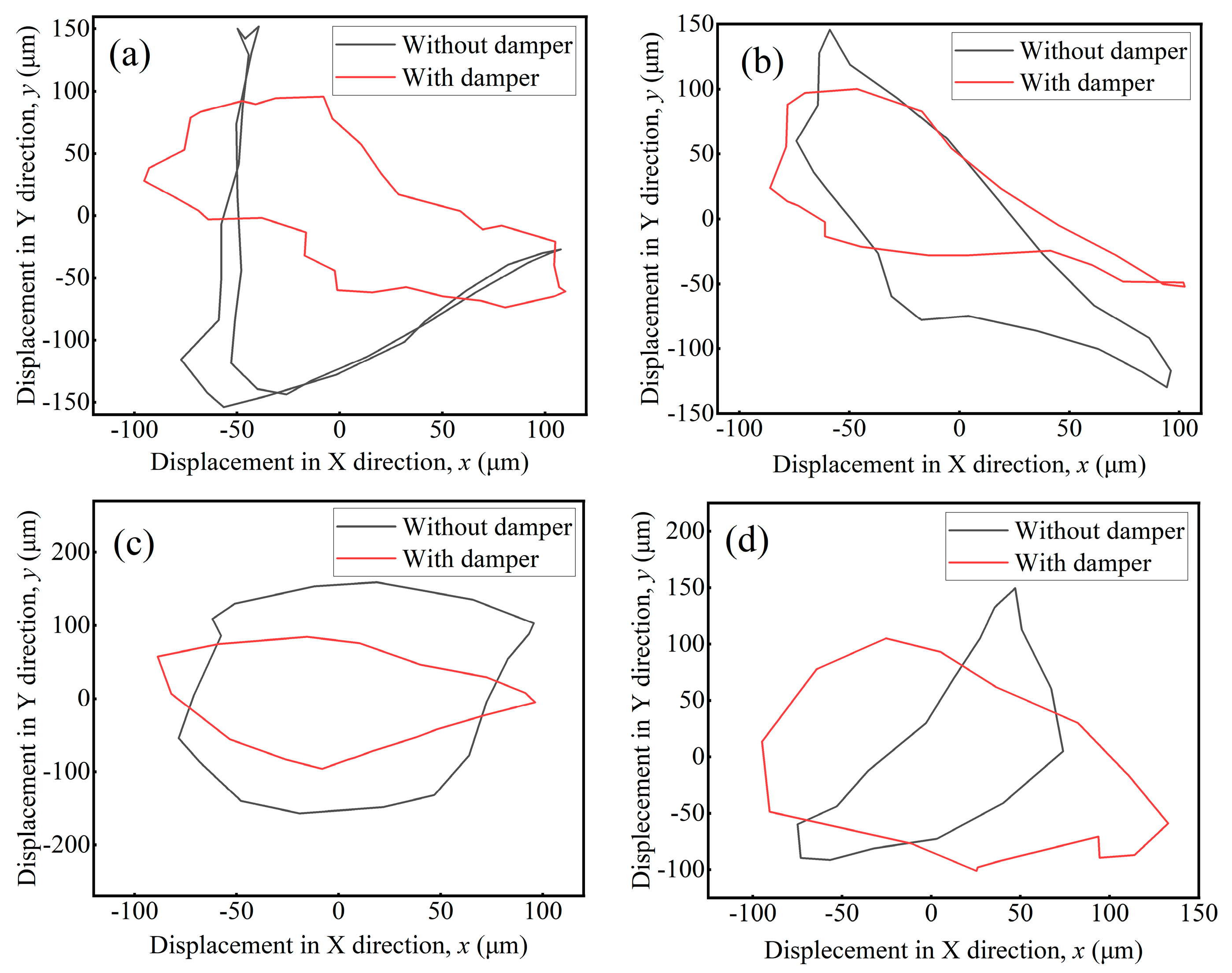
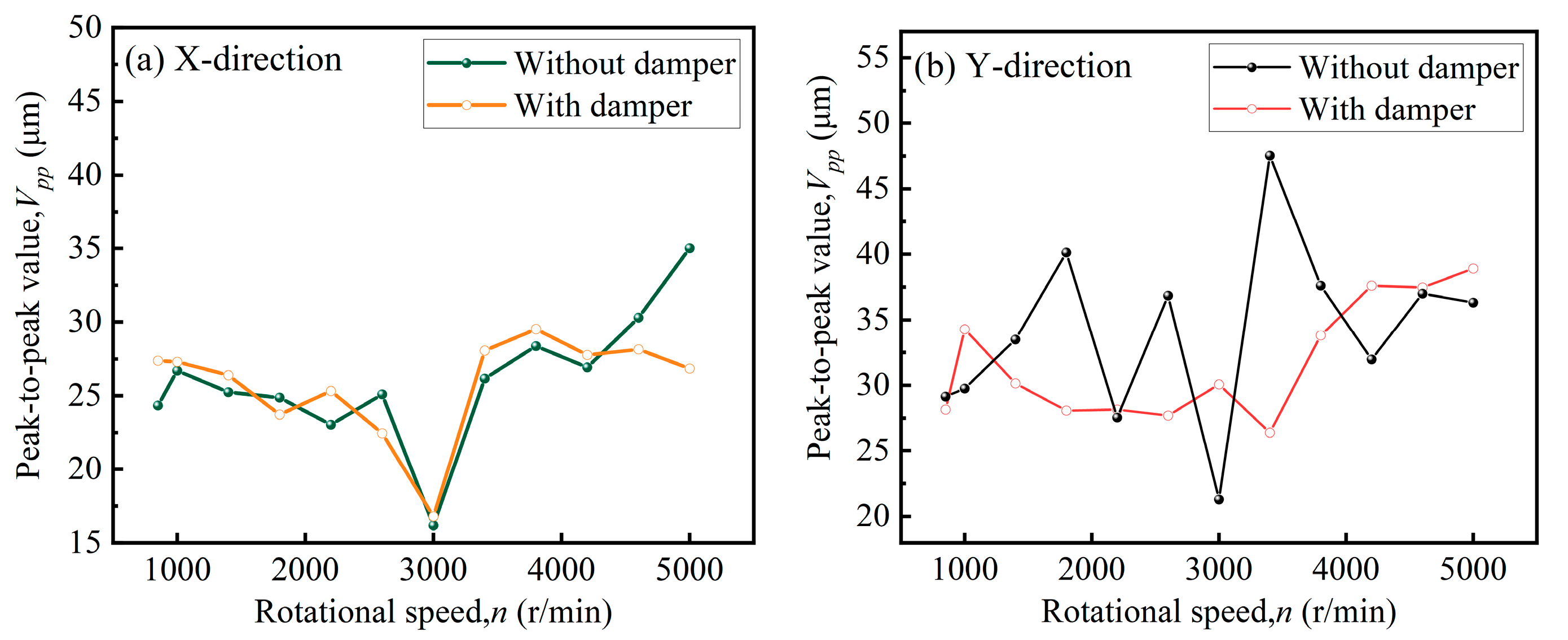
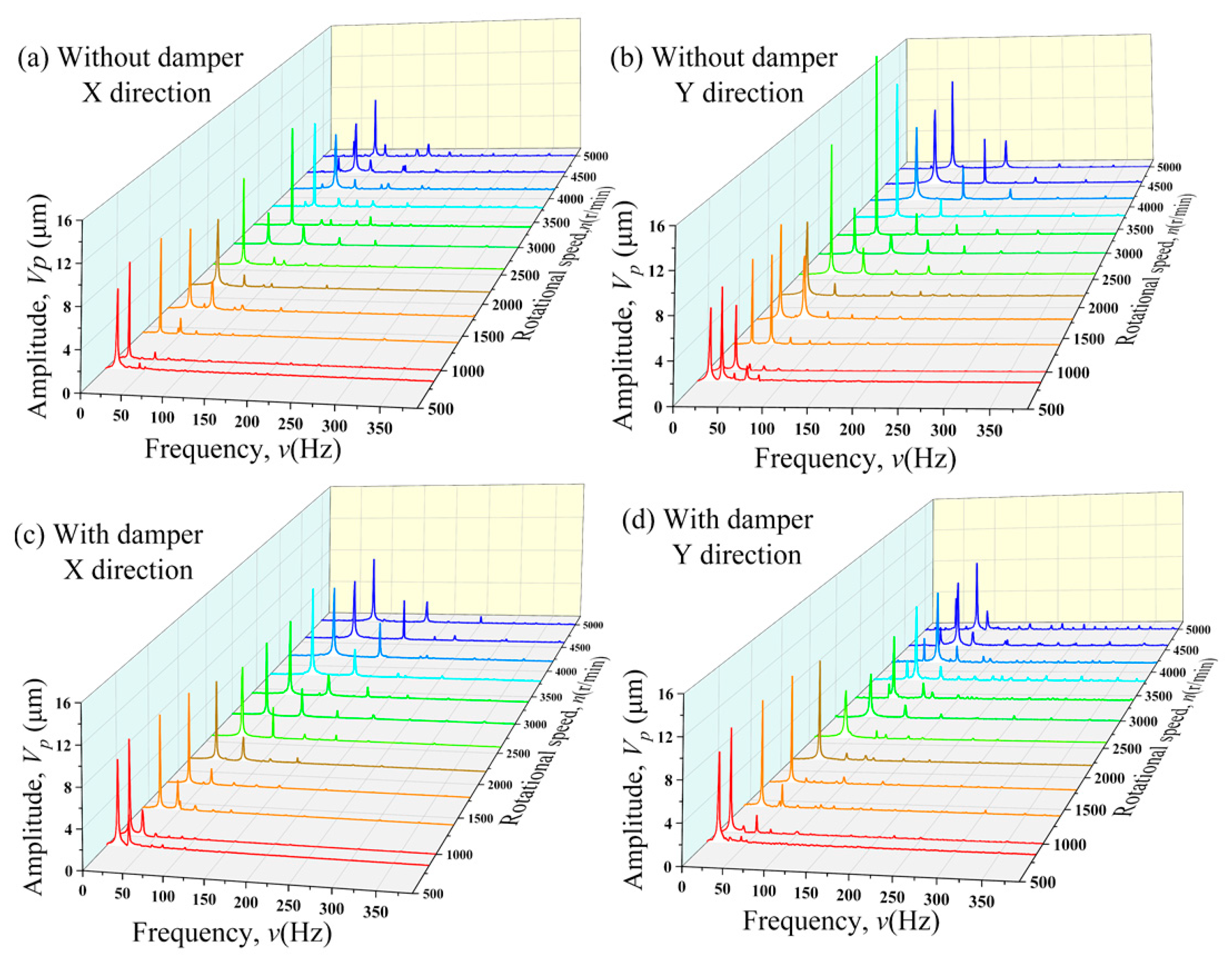
4.2. The Analysis of Experimental Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wei, Y.; Ran, X.; Sun, T.; Liu, S.; Zhang, H.; Zhao, D. Dynamic characteristics analysis of a vertical Jeffcott rotor-brush seal system. J. Chin. Inst. Eng. 2022, 45, 245–254. [Google Scholar] [CrossRef]
- Li, W.; Li, Z.; Han, W.; Wang, Y.; Zhao, J.; Zhou, J. Morphologic transformation of ferrofluid during micropump driving under field control. Ann. N. Y. Acad. Sci. 2025, 1543, 194–203. [Google Scholar] [CrossRef] [PubMed]
- Al-Obaidi, A.R.; Alhamid, J. Analyses of the transient turbulence flow in a 3D impeller axial pump using Novel vibration signals and Inner dynamic simulation techniques. Flow Meas. Instrum. 2025, 102, 102779. [Google Scholar] [CrossRef]
- Hu, G.; Wu, L.; Deng, Y.; Yu, L.; Li, G. Optimal design and performance analysis of magnetorheological damper based on multiphysics coupling model. J. Magn. Magn. Mater. 2022, 558, 169527. [Google Scholar] [CrossRef]
- Wang, Z.; Liu, C.; Zheng, X.; Zhao, L.; Qiu, Y. Advancements in Semi-Active Automotive Suspension Systems with Magnetorheological Dampers: A Review. Appl. Sci. 2024, 14, 7866. [Google Scholar] [CrossRef]
- Hou, S.J.; Gong, J.L.; Wang, G.Y.; Bai, X.F. Experimental and simulation study on the temperature of bone drilled holes with axial low-frequency vibration. Mach. Des. Manuf. 2023, 6, 114–118. [Google Scholar]
- Song, S.; Luo, Y.; Ren, H.; Wang, Y.; Luo, J. Study on the microscopic model of magnetorheological fluids of three magnetic particles with different diameters. J. Magn. Magn. Mater. 2022, 564, 169854. [Google Scholar] [CrossRef]
- Pei, P.; Peng, Y. Constitutive modeling of magnetorheological fluids: A review. J. Magn. Magn. Mater. 2022, 550, 169076. [Google Scholar] [CrossRef]
- Marins, J.A.; Plachý, T.; Kuzhir, P. Iron–sepiolite magnetorheological fluids with improved performances. J. Rheol. 2019, 63, 125–139. [Google Scholar] [CrossRef]
- Rahman, M.; Ong, Z.C.; Julai, S.; Ferdaus, M.; Ahamed, R. A review of advances in magnetorheological dampers: Their design optimization and applications. J. Zhejiang Univ. A 2017, 18, 991–1010. [Google Scholar] [CrossRef]
- Chen, F.; Zhang, J.; Li, Z.; Yan, S.; Li, W.; Yan, Z.; Liu, X. Effect of the surface coating of carbonyl iron particles on the dispersion stability of magnetorheological fluid. Sci. Rep. 2024, 14, 1–15. [Google Scholar] [CrossRef]
- Chen, F.; Zhang, J.; Guo, Q.; Liu, Y.; Liu, X.; Ding, W.; Yan, S.; Yan, Z.; Li, Z. Carbonyl Iron Particles’ Enhanced Coating Effect Improves Magnetorheological Fluid’s Dispersion Stability. Materials 2024, 17, 4449. [Google Scholar] [CrossRef]
- Yang, G.; Pan, J.; Wang, D. A review on the magnetorheological materials and applications. Int. J. Appl. Electromagn. Mech. 2024, 75, 407–443. [Google Scholar] [CrossRef]
- Eshgarf, H.; Nadooshan, A.A.; Raisi, A. An overview on properties and applications of magnetorheological fluids: Dampers, batteries, valves and brakes. J. Energy Storage 2022, 50, 104648. [Google Scholar] [CrossRef]
- Li, W.; Li, Z.; Han, W.; Li, D.; Yan, S.; Zhou, J. Study of the Flow Characteristics of Pumped Media in the Confined Morphology of a Ferrofluid Pump with Annular Microscale Constraints. J. Fluids Eng. 2024, 147, 1–31. [Google Scholar] [CrossRef]
- Lu, M.; Yang, Y.; Lin, J.; Du, Y. Research progress of magnetorheological polishing technology: A review. Adv. Manuf. 2024, 1–37. [Google Scholar] [CrossRef]
- Li, W.; Li, Z.; Qin, Z.; Yan, S.; Wang, Z.; Peng, S. Influence of the solution pH on the design of a hydro-mechanical magneto-hydraulic sealing device. Eng. Fail. Anal. 2022, 135, 106091. [Google Scholar] [CrossRef]
- Oh, J.-S.; Sohn, J.W.; Choi, S.-B. Applications of Magnetorheological Fluid Actuator to Multi-DOF Systems: State-of-the-Art from 2015 to 2021. Actuators 2022, 11, 44. [Google Scholar] [CrossRef]
- Aziz, M.A.; Aminossadati, S.M. State-of-the-art developments of bypass Magnetorheological (MR) dampers: A review. Korea-Aust. Rheol. J. 2021, 33, 225–249. [Google Scholar] [CrossRef]
- Chen, A.; Liu, D.; Zhu, P. Progress in the study of nonlinear vibration of rotor system. J. Xiangtan Stitute Min. 1999, 2, 59–65. [Google Scholar]
- Wang, J.; Meng, G. Experimental study of magnetorheological fluid dampers for rotor vibration control. J. Huazhong Univ. Sci. Technol. Intrinsic Sci. Ed. 2001, 29, 3. [Google Scholar]
- Zhao, Q.; Zhao, J.Y.; Zhang, N. Modeling and control of vehicle dual magnetorheological damping seat suspension. J. Chongqing Univ. Technol. Intrinsic Sci. 2018, 32, 37–42. [Google Scholar]
- Zhang, L.; Tang, H.; Sun, T.; Yu, J.; Li, Z.; Wang, X. Vibration characteristics analysis of shaft system for bulb hydroelectric generating unit based on magnetorheological fluid damper. Chaos Solitons Fractals 2022, 163, 112559. [Google Scholar] [CrossRef]
- Hu, G.; Liu, F.; Xie, Z.; Xu, M. Design, analysis, and experimental evaluation of a double coil magnetorheological fluid damper. Shock. Vib. 2016, 1, 4184726. [Google Scholar] [CrossRef]
- Tae-Hoon, L.; Choi, S.-K. On the response time of a new permanent magnet based magnetorheological damper: Experimental investigation. Smart Mater. Struct. 2018, 28, 14001. [Google Scholar]
- Wang, J.; Liu, Y.; Qin, Z.; Ma, L.; Chu, F. Nonlinear characteristic investigation of magnetorheological damper-rotor system with local nonline-arity. Chin. J. Aeronaut. 2023, 36, 111–126. [Google Scholar]
- Ma, L.; Wang, J.; Li, C. Vibration suppression of a rotor system with a nonlinear MR damper. Arch. Appl. Mech. 2021, 91, 4053–4068. [Google Scholar] [CrossRef]
- Liu, P.; Ma, L.; Bo, W.; Wang, Z. Study on new type of permanent magnet magnetorheological damper for inclined cable and its parameter optimization. Bridge Constr. 2018, 48, 51–55. [Google Scholar]
- Kim, W.H.; Park, J.H.; Kaluvan, S.; Lee, Y.-S.; Choi, S.-B. A novel type of tunable magnetorheological dampers operated by permanent magnets. Sens. Actuators A Phys. 2017, 255, 104–117. [Google Scholar] [CrossRef]
- Khedkar, Y.M.; Bhat, S.; Adarsha, H. Fabrication and Testing of Modified Magnetorheological Damper Fitted with External Permanent Magnet Assembly. Int. J. Mech. Eng. Robot. Res. 2022, 11, 215–226. [Google Scholar] [CrossRef]
- Duan, Y.; Ni, Y.Q.; Zhang, H.F.B., Jr.; Ko, J.M.; Fang, Y. Design formulas for vibration control of taut cables using passive MR dampers. Smart Struct. Syst. Int. J. 2019, 23, 521–536. [Google Scholar]
- Hu, W.; Cheng, L.; Xi, L. Dynamic balance design and modal analysis of scroll compressor drive system. Model. Simul. 2023, 12, 524. [Google Scholar]
- Aziz, M.A.; Mohtasim, S.M.; Ahammed, R. State-of-the-art recent developments of large magnetorheological (MR) dampers: A review. Korea-Aust. Rheol. J. 2022, 34, 105–136. [Google Scholar] [CrossRef]
- Yao, D.K.; Zou, J.X.; Zhao, S.S. Effect of stiffness on shafting stability of Three Gorges Hydropower Generator Set. Power Stn. Syst. Eng. 2005, 21, 3. [Google Scholar]
- Qian, R.; Wang, G.; Jiang, M.; Zhang, Y.; Zhai, R.; Wang, W. Frequency-Dependent Bouc–Wen Modeling of Magnetorheological Damper Using Harmonic Balance Approach. Actuators 2024, 13, 297. [Google Scholar] [CrossRef]
- Zhang, G.C.; Wang, J.; Ma, L.; Li, C.H. Research on dynamic characteristics of rotor-MRD system under friction fault. Mech. Des. Manuf. 2021, 1, 210–215. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Damper System | Damping Device | Applicable Motor Characteristic Range |
|---|---|---|
| Passive dampers | Hydraulic damper | Size range 50–500 mm Power range > 100 kW |
| Rubber ring | Size range 1–500 mm Power range 1–10 kW | |
| Semi-active damper | Current flow damper | Size range 5–150 mm Power range 1–100 kW |
| Active dampers | Piezoelectric actuators | Size range 5–200 mm Power range < 1 kW |
| Hybrid dampers | The piezoelectric actuator is combined with the rubber ring | The size can be adjusted by the piezoelectric actuator and rubber ring Power range > 100 kW |
| Structure | Parameters |
|---|---|
| Dynamic damping plate | Length: 37.5 mm; width: 22 mm; thickness: 2 mm |
| Static damping plate | Length: 27 mm; width: 28 mm; thickness: 2 mm |
| Permanent magnet | Length: 24 mm; width: 33 mm; thickness: 5 mm |
| Septum | Length: 24 mm; width: 33 mm; thickness: 4 mm |
| Bearing | Outer diameter: 8.5 mm; inner diameter: 5 mm |
| Physical Quantity | Parameters |
|---|---|
| Particle size | 5 μm |
| Mass fraction of particles | 60 wt.% |
| Density of coated CIP | 5.036 g/cm3 |
| Zero-field viscosity (25 °C) | 19.47 Pa·s |
| Field-induced shear yield stress (175 kA/m, 25 °C, 1000 s−1) | 18.95 kPa |
| System Device | Parameters |
|---|---|
| Pivot | Diameter: 10 mm; length: 820 mm |
| Counterweight plate 1 | Diameter: 74 mm; thickness: 25 mm; mass: 500 g |
| Counterweight plate 2 | Diameter: 74 mm; thickness: 15 mm; mass; 800 g |
| Motor | Rotational speed: 0~10,000 r/min |
| Displacement sensor | Diameter: 5 mm; sensitivity: −8 V/mm; range: 0~10,000 Hz |
| Tachometer sensor | Test range: 1~20,000 r/min |
| Character Radical | Parameters |
|---|---|
| Spindle diameter | 10 mm |
| Spindle length | 820 mm |
| Counterweight disk diameter | 74 mm |
| Counterweight disk length | 5 mm |
| Variable | Modal Order | Rotate Direction | Critical Speed (rpm) | Intrinsic Frequency (Hz) |
|---|---|---|---|---|
| Undamped | 1 | BW | 2452.5 | 40.969 |
| 2 | FW | 2463.7 | 40.970 | |
| 3 | BW | 3437.7 | 57.404 | |
| 4 | FW | 3450.8 | 57.405 | |
| 5 | BW | - | 146.700 | |
| 6 | FW | - | 146.700 | |
| Damping | 1 | BW | 3104.7 | 51.768 |
| 2 | FW | 3107.5 | 51.768 | |
| 3 | BW | 3637.0 | 60.724 | |
| 4 | FW | 3649.9 | 60.727 | |
| 5 | BW | - | 143.760 | |
| 6 | FW | - | 143.760 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, F.; Guo, Q.; Liu, Y.; Dong, Y.; Xiao, Y.; Zhang, N.; Li, W. Design and Test of a Magnetorheological Damper of a Multi-Layered Permanent Magnet. Actuators 2025, 14, 271. https://doi.org/10.3390/act14060271
Chen F, Guo Q, Liu Y, Dong Y, Xiao Y, Zhang N, Li W. Design and Test of a Magnetorheological Damper of a Multi-Layered Permanent Magnet. Actuators. 2025; 14(6):271. https://doi.org/10.3390/act14060271
Chicago/Turabian StyleChen, Fang, Qinkui Guo, Yuchen Liu, Yuan Dong, Yangjie Xiao, Ningqiang Zhang, and Wangxu Li. 2025. "Design and Test of a Magnetorheological Damper of a Multi-Layered Permanent Magnet" Actuators 14, no. 6: 271. https://doi.org/10.3390/act14060271
APA StyleChen, F., Guo, Q., Liu, Y., Dong, Y., Xiao, Y., Zhang, N., & Li, W. (2025). Design and Test of a Magnetorheological Damper of a Multi-Layered Permanent Magnet. Actuators, 14(6), 271. https://doi.org/10.3390/act14060271