
Design and Performance Evaluation of a μ-Synthesis-Based Robust Impedance Controller for Robotic Joints


Abstract
1. Introduction
- A robust impedance control framework leveraging -synthesis to address structured uncertainties in robotic joints, including dynamic parameter perturbations, sensor noise, and actuator dynamics. This framework ensures stable interaction with passive environments while maintaining high-fidelity impedance rendering.
- A novel frequency domain performance index based on the maximum structured singular value (), designed to systematically minimize impedance matching errors and optimize closed-loop robust performance.
- Experimental validation on a modular robotic joint, demonstrating the controller’s effectiveness in achieving accurate impedance rendering and interaction stability under real-world disturbances and uncertainties.
2. Robot Dynamic System Modeling
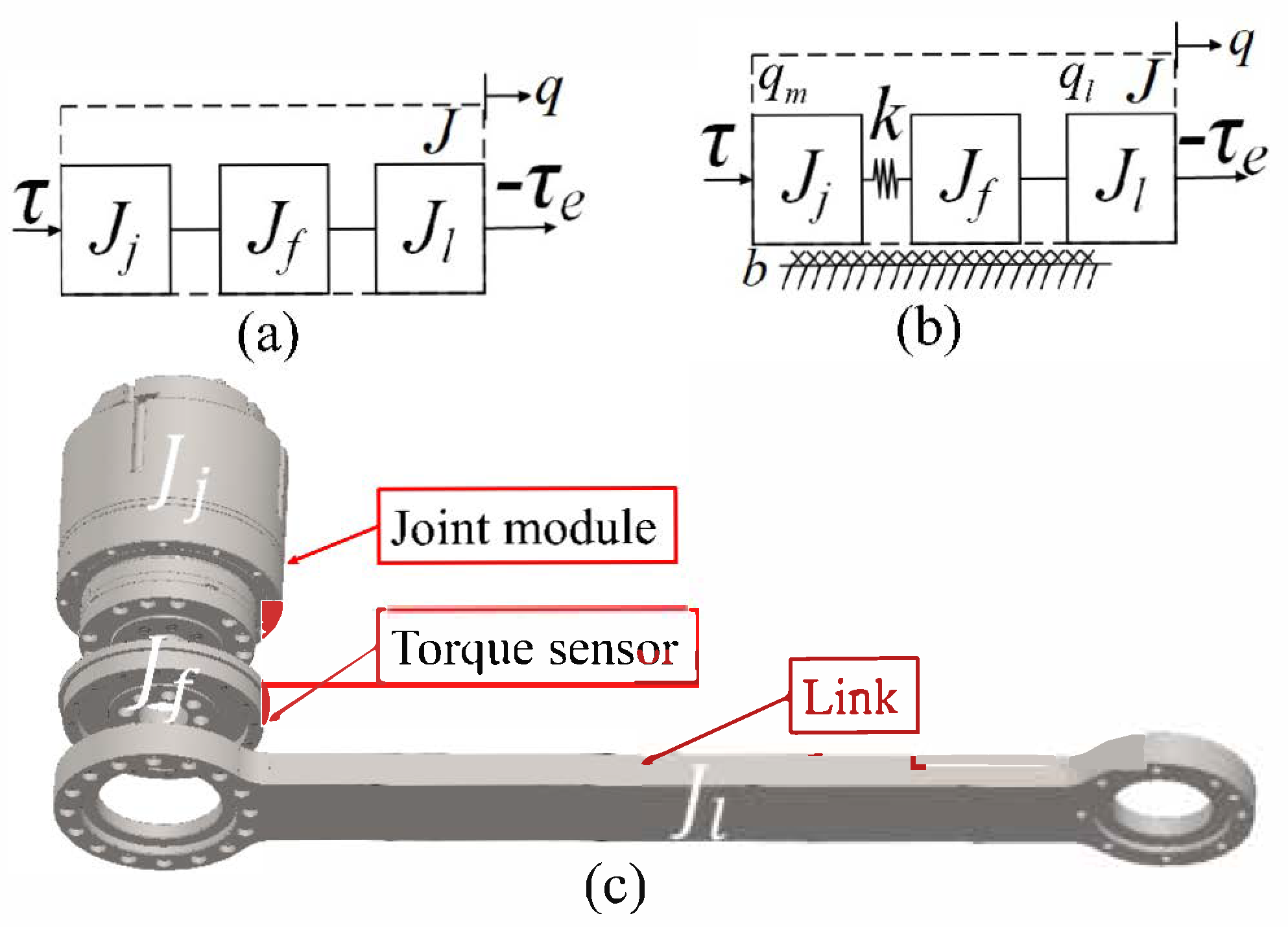
2.1. Dynamic Model
2.2. Building Uncertain Models
2.2.1. Uncertain Real Parameters
2.2.2. Measurement of Noise Uncertainty
2.2.3. Input Disturbance
2.2.4. Actuator Uncertainty
3. Methodology
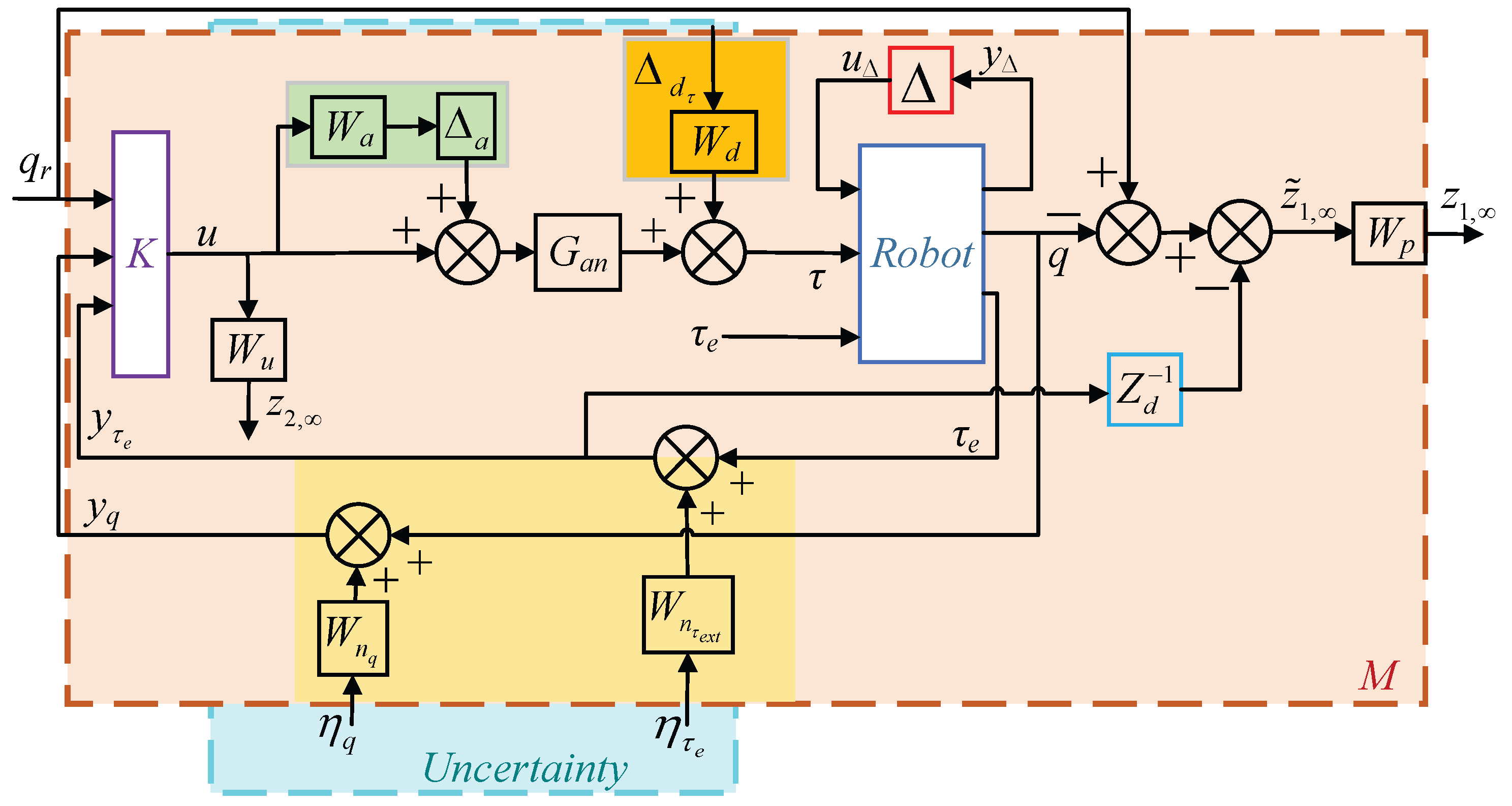
3.1. Robust Impedance Control Framework
3.2. -Synthesis Problem
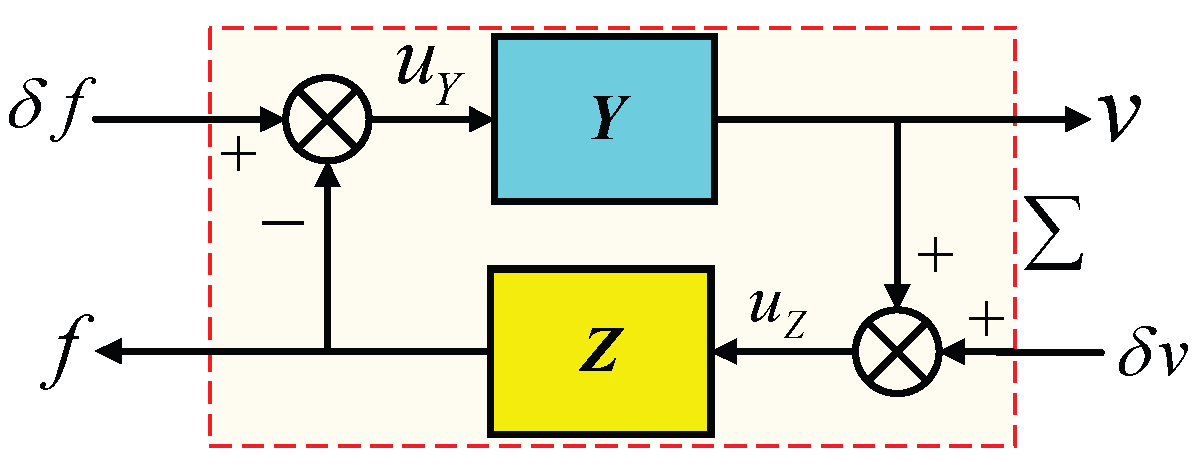
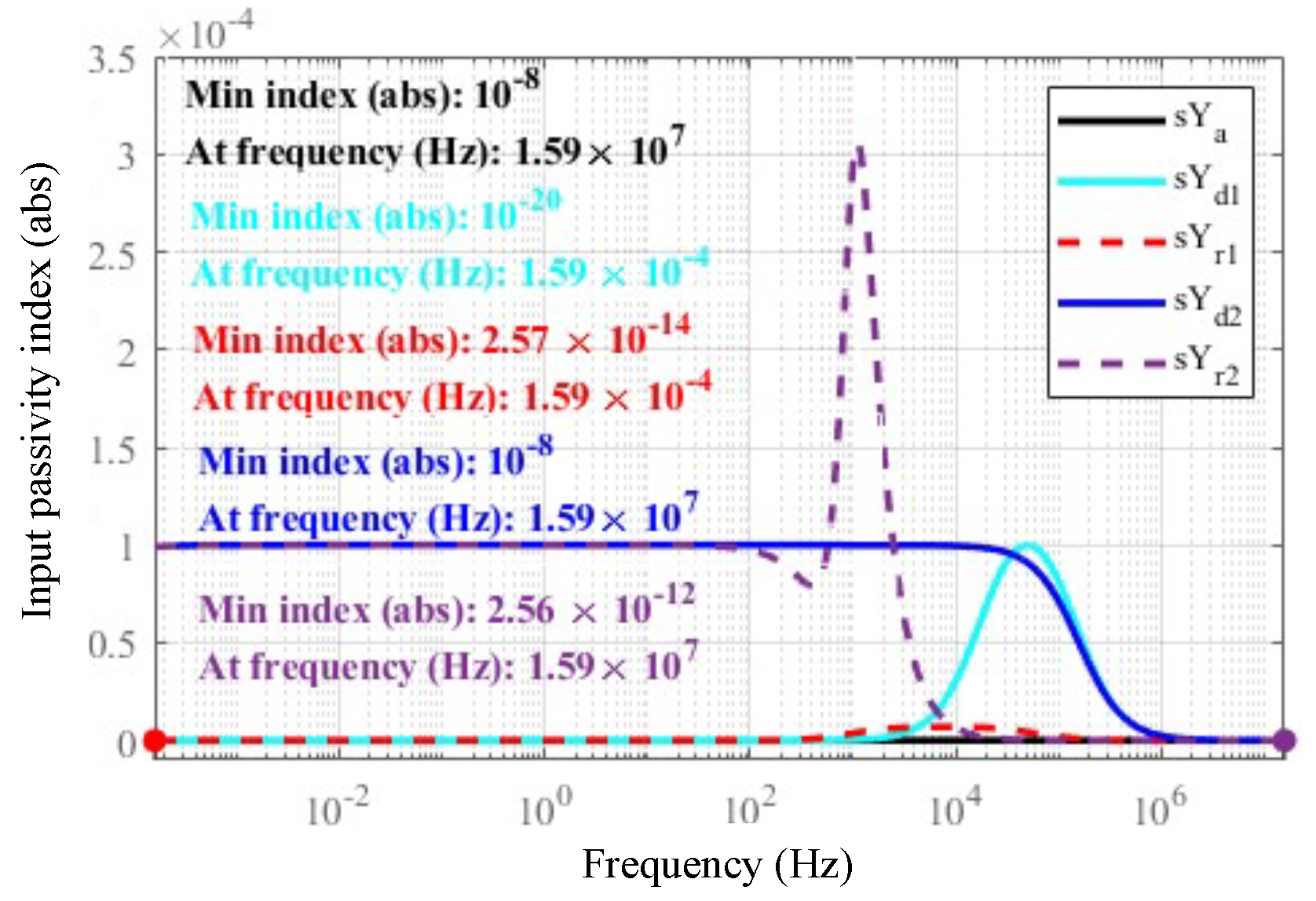
3.3. Interaction Stability Based on Passivity Index
- (input u) is the external torque (unit: Nm),
- (output y) is the angular velocity (unit: rad/s).
3.4. Impedance Control -Synthesis via D-K Iteration
3.5. Weighting Functions Selection
3.6. Performance Metrics and Iterative Tuning
4. Results and Discussion
4.1. Simulation Setup
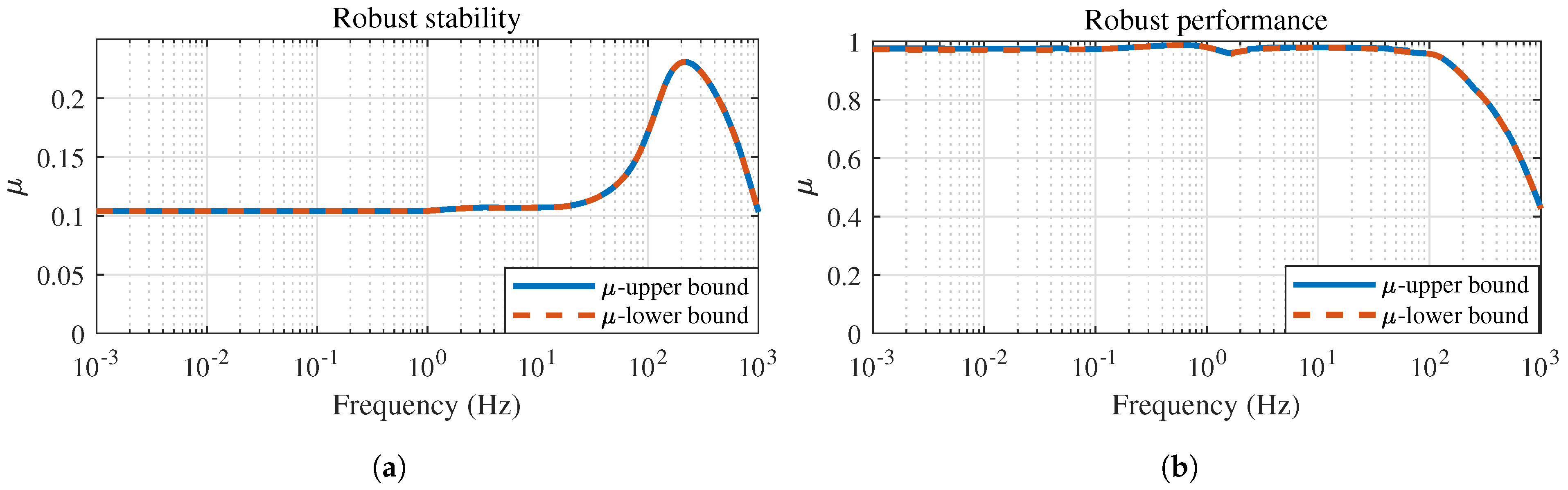
4.2. Robust Stability and Performance Assessment of the Closed-Loop System
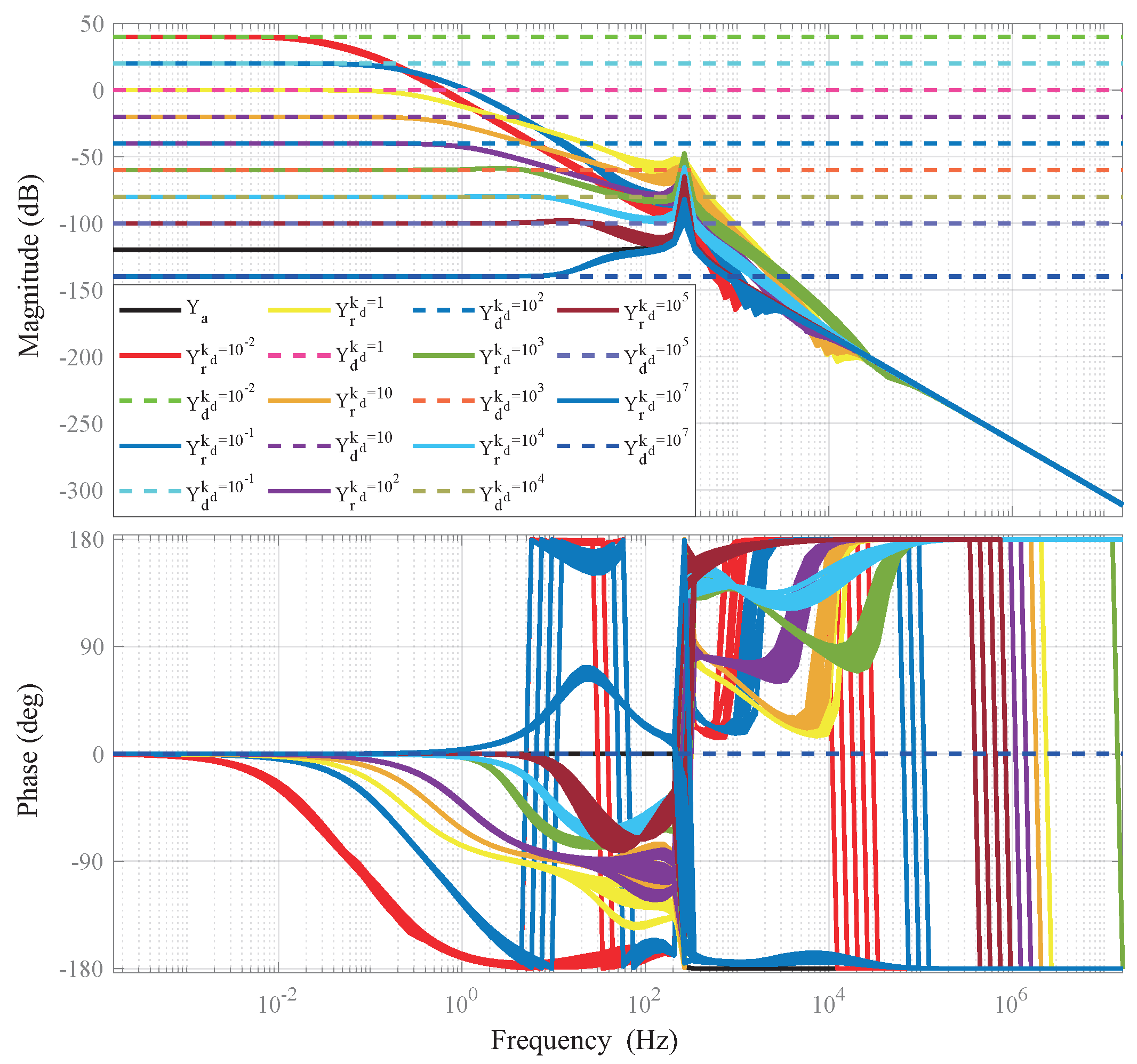
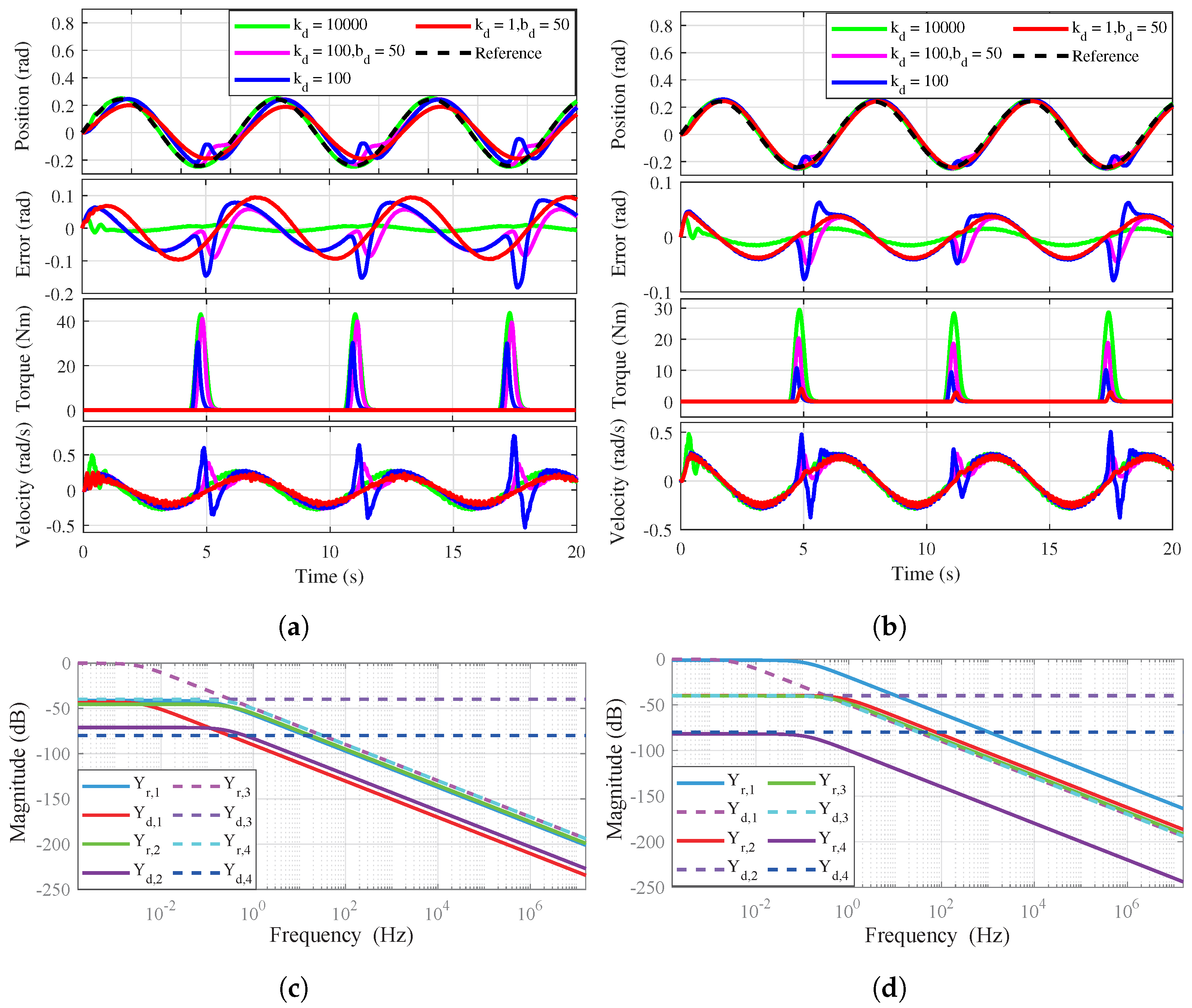
4.3. Evaluation of Impedance Rendering Performance
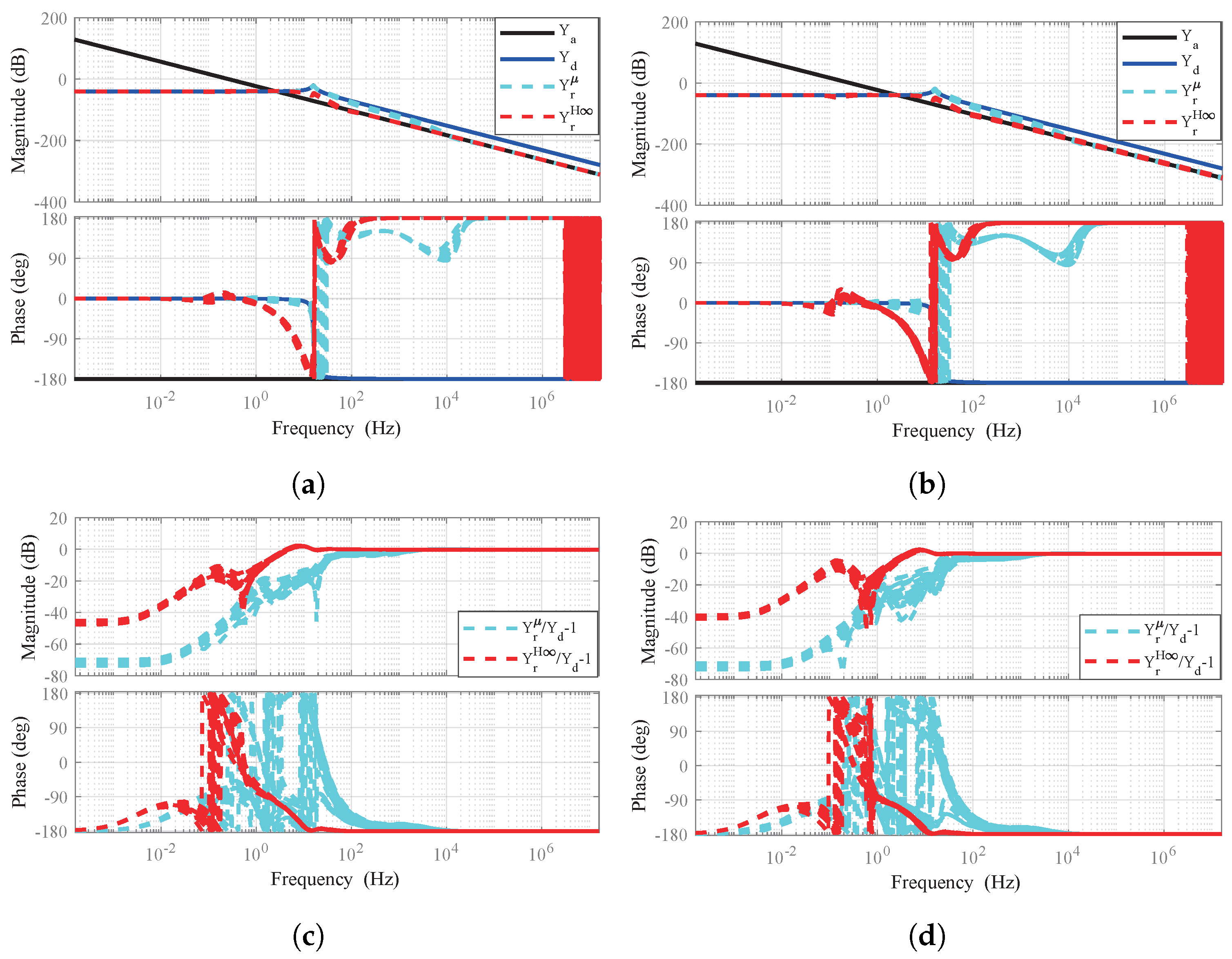
4.4. Comparative Analysis of Impedance Matching: -Synthesis vs. Control
4.5. Analysis of Critical Factors Influencing Impedance Matching Performance
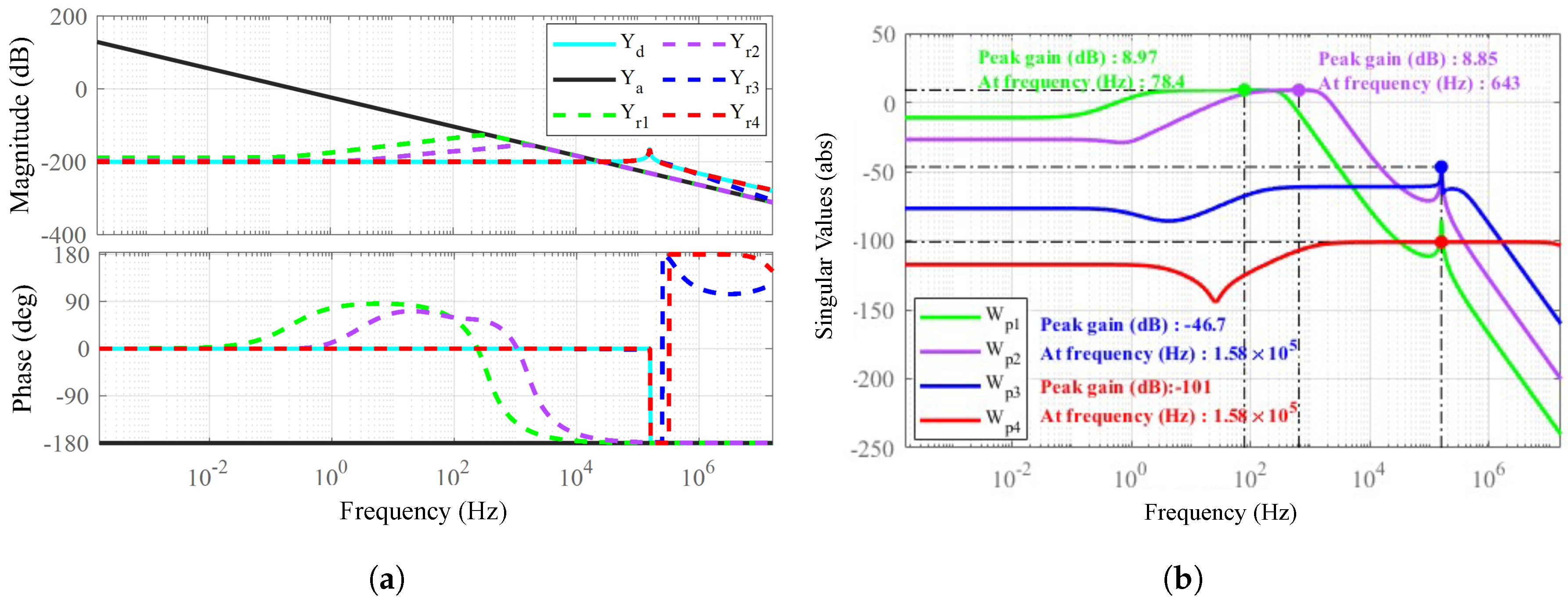
4.5.1. Effect of Performance Weighting Functions on Bandwidth
4.5.2. Impact of Joint Flexibility on Impedance Rendering Accuracy
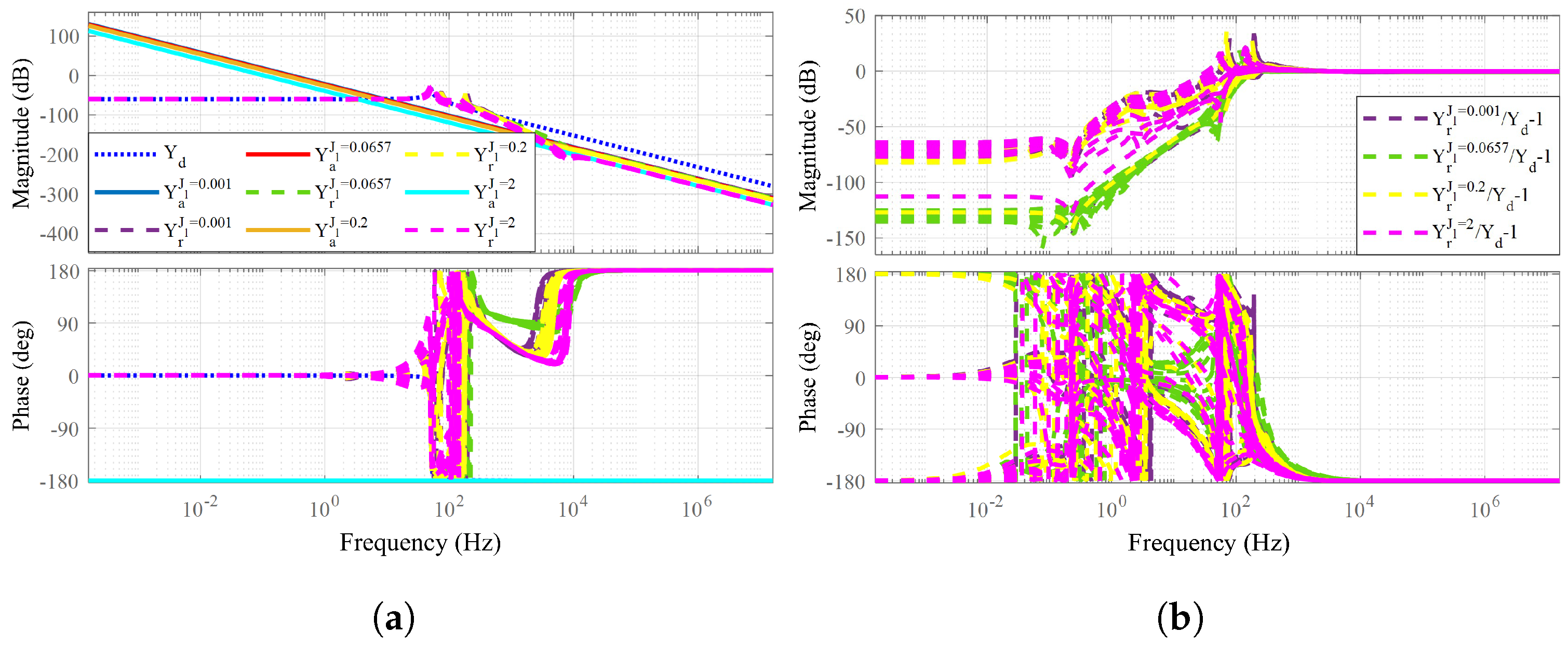
4.5.3. Influence of Load Inertia Variations on Impedance Matching Performance
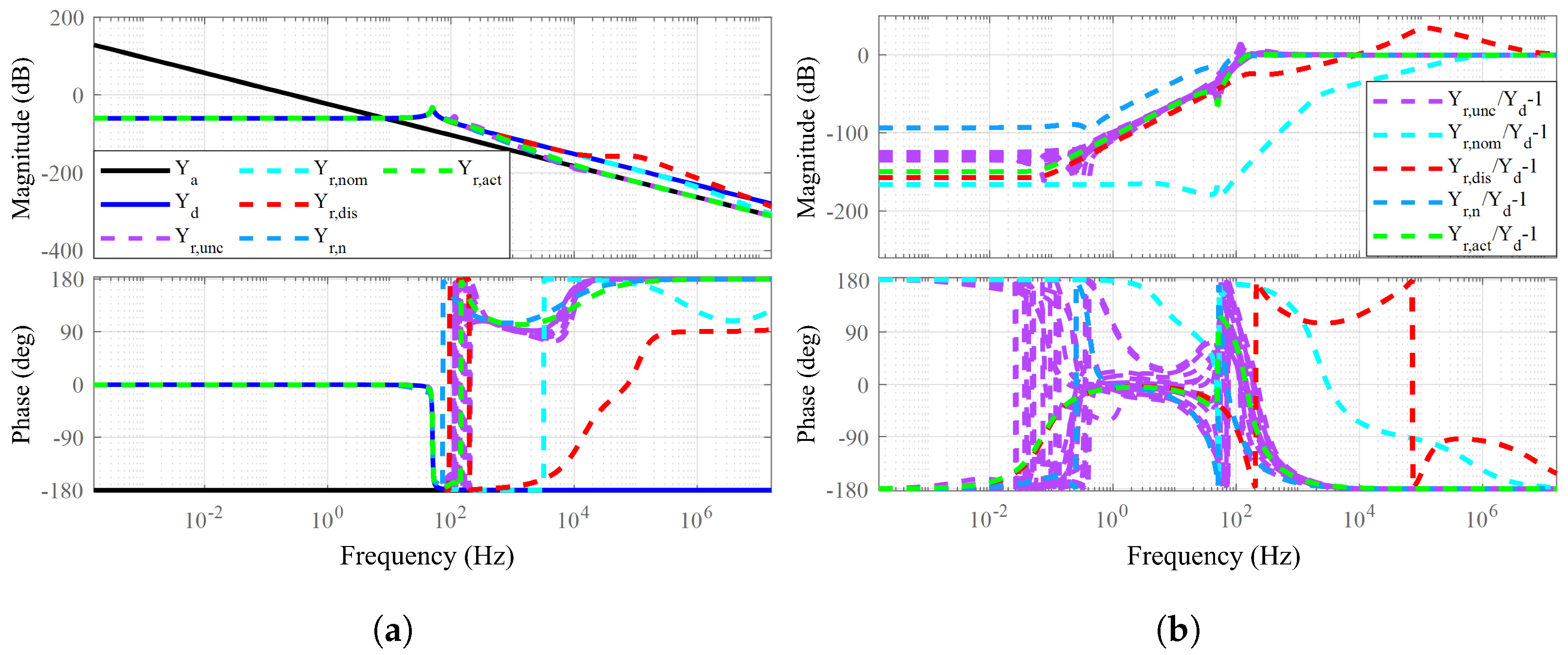
4.5.4. Effect of Uncertainty Sources on Impedance Matching Performance
4.6. Robots Interaction with the “Worst-Case” Environments
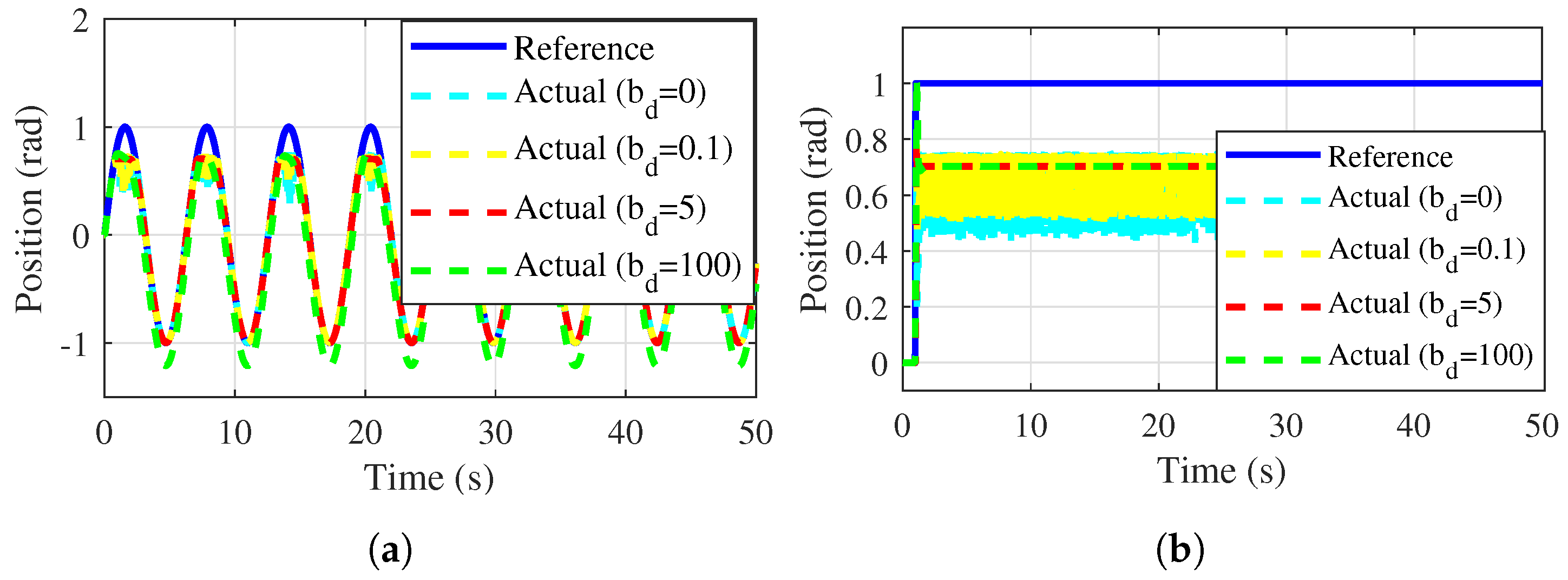
4.6.1. Impact of Virtual Damping on Control Performance
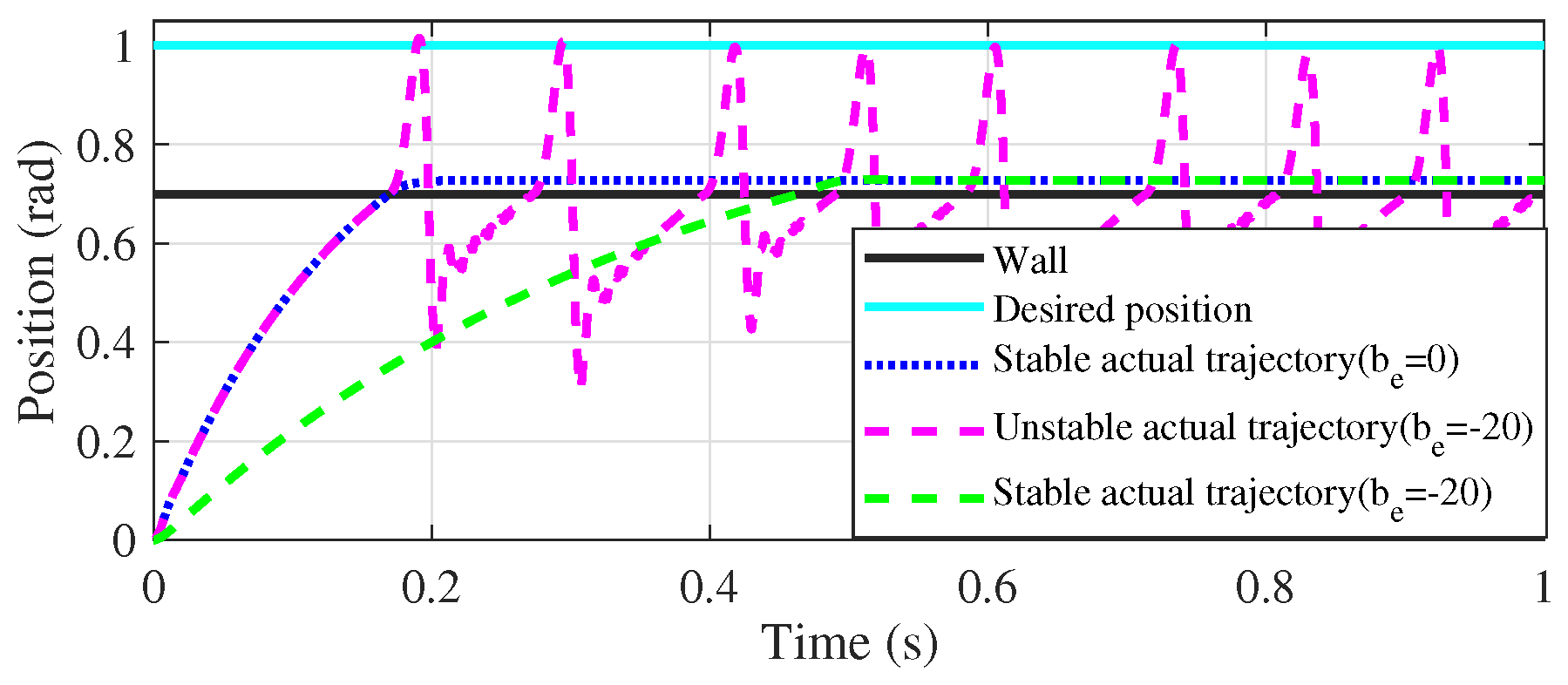
4.6.2. Contact with Viscoelastic Environments Featuring Negative Damping
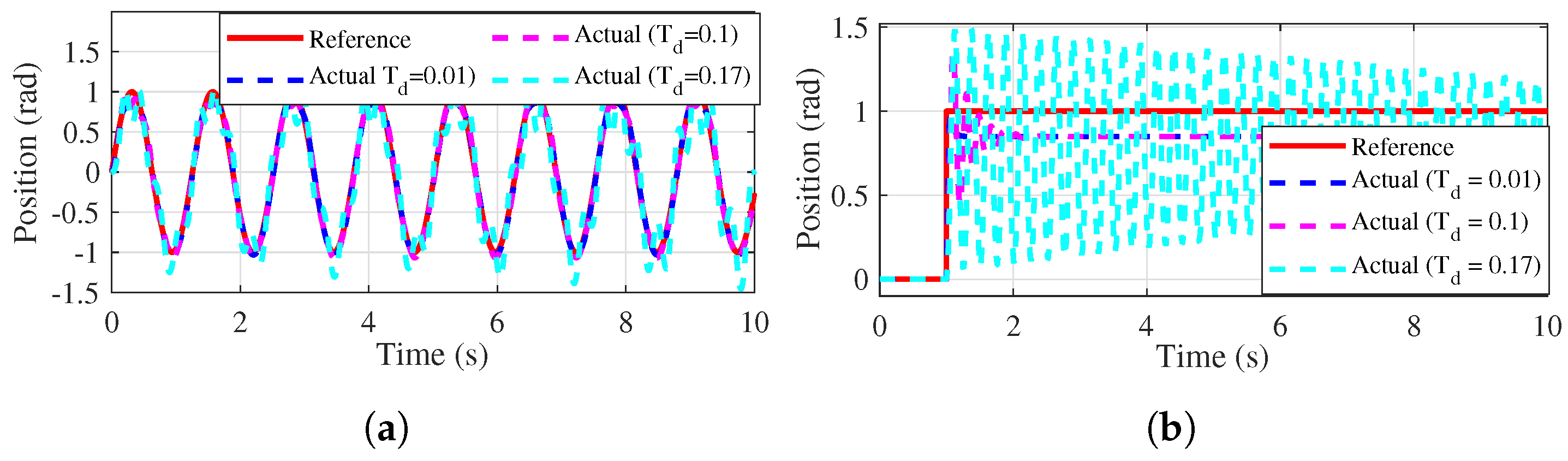
4.6.3. Effect of Actuator Phase Lag
4.7. Passivity Analysis
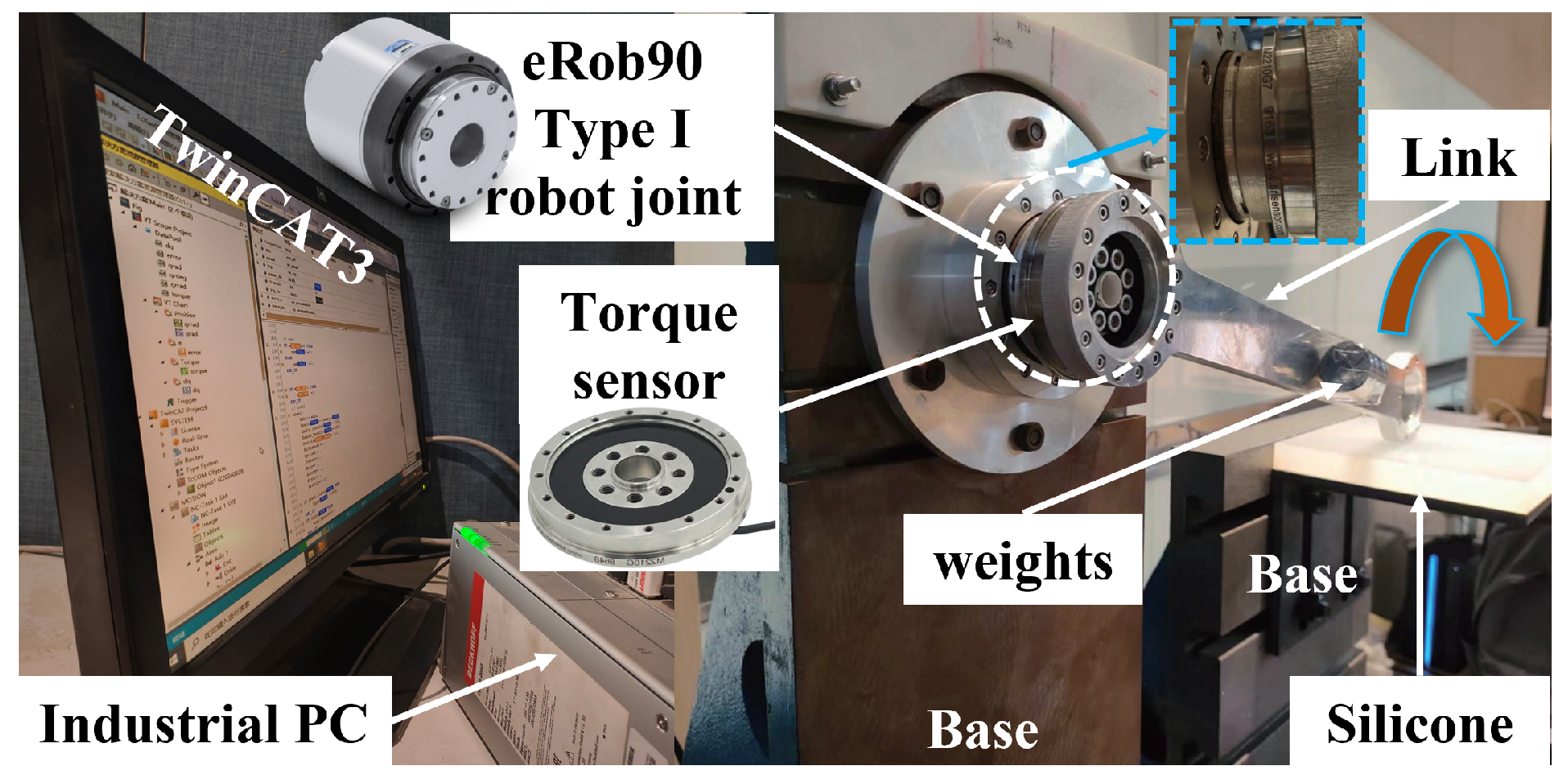
4.8. Experimental Setup
4.9. Experiments: Comparison of Contact Performance
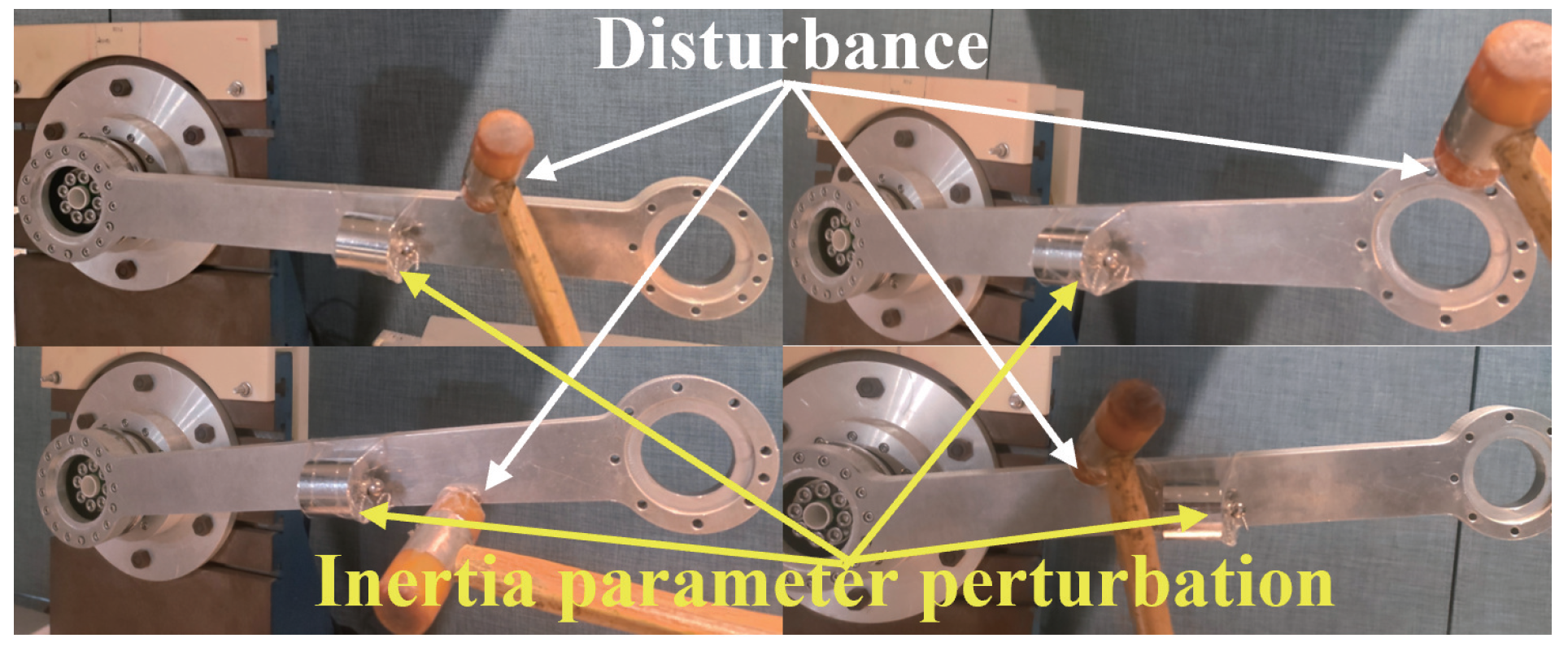
4.10. Experiments: Robustness Verification
4.11. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Billard, A.; Kragic, D. Trends and challenges in robot manipulation. Science 2019, 364, eaat8414. [Google Scholar] [CrossRef] [PubMed]
- Hogan, N.; Buerger, S.P. Impedance and interaction control. In Robotics and Automation Handbook; CRC Press: Boca Raton, FL, USA, 2018; pp. 375–398. [Google Scholar]
- Hogan, N. Impedance control—An approach to manipulation. I—Theory. II—Implementation. III—Applications. J. Dyn. Syst. Meas. Control 1985, 107, 1–24. [Google Scholar] [CrossRef]
- Albu-Schäffer, A.; Ott, C.; Hirzinger, G. A unified passivity-based control framework for position, torque and impedance control of flexible joint robots. Int. J. Robot. Res. 2007, 26, 23–39. [Google Scholar] [CrossRef]
- Valency, T.; Zacksenhouse, M. Accuracy/Robustness Dilemma in Impedance Control. J. Dyn. Syst. Meas. Control 2003, 125, 310–319. [Google Scholar] [CrossRef]
- Siciliano, B.; Villani, L. Robot Force Control; Springer: New York, NY, USA, 1999. [Google Scholar]
- Lawrence, D. Impedance Control Stability Properties in Common Implementations. In Proceedings of the 1988 IEEE International Conference on Robotics and Automation, Philadelphia, PA, USA, 24–29 April 1988; Volume 2, pp. 1185–1190. [Google Scholar] [CrossRef]
- Hogan, N. Contact and physical interaction. Annu. Rev. Control Robot. Auton. Syst. 2022, 5, 179–203. [Google Scholar] [CrossRef]
- Tosun, F.E.; Patoglu, V. Necessary and sufficient conditions for the passivity of impedance rendering with velocity-sourced series elastic actuation. IEEE Trans. Robot. 2020, 36, 757–772. [Google Scholar] [CrossRef]
- Hace, A.; Uran, S.; Jezernik, K.; Curk, B. Robust Sliding Mode Based Impedance Control. In Proceedings of the IEEE International Conference on Intelligent Engineering Systems, Budapest, Hungary, 15–17 September 1997; pp. 77–82. [Google Scholar] [CrossRef]
- Lu, Z.; Goldenberg, A.A. Robust impedance control and force regulation: Theory and experiments. Int. J. Robot. Res. 1995, 14, 225–254. [Google Scholar]
- Kelly, R.; Carelli, R.; Amestegui, M.; Ortega, R. On Adaptive Impedance Control of Robot Manipulators. In Proceedings of the 1989 International Conference on Robotics and Automation, Scottsdale, AZ, USA, 14–19 May 1989; Volume 1, pp. 572–577. [Google Scholar] [CrossRef]
- Izadbakhsh, A.; Khorashadizadeh, S. Robust impedance control of robot manipulators using differential equations as universal approximator. Int. J. Control 2018, 91, 2170–2186. [Google Scholar] [CrossRef]
- Zhou, K.; Doyle, J.C. Essentials of Robust Control; Prentice Hall Upper: Saddle River, NJ, USA, 1998; Volume 104. [Google Scholar]
- Packard, A.K. What’s New With Mu: Structured Uncertainty in Multivariable Control; University of California: Berkeley, CA, USA, 1988. [Google Scholar]
- Zhang, S.Y.; Hui, Z.; Huang, Q.T. Application of μ theory in compliant force control. Chin. J. Aeronaut. 2006, 19, 89–96. [Google Scholar] [CrossRef]
- Uchimura, Y.; Kazerooni, H. A μ-Synthesis Based Control for Compliant Maneuvers. J. Dyn. Syst. Meas. Control 2006, 128, 914–921. [Google Scholar] [CrossRef]
- Aghili, F. Robust Impedance-Matching of Manipulators Interacting With Uncertain Environments: Application to Task Verification of the Space Station’s Dexterous Manipulator. IEEE/ASME Trans. Mechatronics 2019, 24, 1565–1576. [Google Scholar] [CrossRef]
- Fotuhi, M.J.; Ben Hazem, Z.; Bingül, Z. Modelling and Torque Control of an Non-Linear Friction Inverted Pendulum Driven with a Rotary Series Elastic Actuator. In Proceedings of the 2019 3rd International Symposium on Multidisciplinary Studies and Innovative Technologies (ISMSIT), Ankara, Turkey, 11–13 October 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Guo, X.; Volery, M.; Lissek, H. PID-like active impedance control for electroacoustic resonators to design tunable single-degree-of-freedom sound absorbers. J. Sound Vib. 2022, 525, 116784. [Google Scholar] [CrossRef]
- Kim, W.; Lee, D.; Yun, D.; Ji, Y.; Kang, M.; Han, J.; Han, C. Neurorehabilitation Robot System for Neurological Patients Using H-Infinity Impedance Controller. In Proceedings of the 2015 IEEE International Conference on Rehabilitation Robotics (ICORR), Singapore, 11–14 August 2015; pp. 876–881. [Google Scholar] [CrossRef]
- Ott, C.; Albu-Schaffer, A.; Kugi, A.; Hirzinger, G. On the Passivity-Based Impedance Control of Flexible Joint Robots. IEEE Trans. Robot. 2008, 24, 416–429. [Google Scholar] [CrossRef]
- Losey, D.P.; Erwin, A.; McDonald, C.G.; Sergi, F.; O’Malley, M.K. A Time-Domain Approach to Control of Series Elastic Actuators: Adaptive Torque and Passivity-Based Impedance Control. IEEE/ASME Trans. Mechatronics 2016, 21, 2085–2096. [Google Scholar] [CrossRef]
- Lee, H.; Lee, J.; Keppler, M.; Oh, S. Robust Elastic Structure Preserving Control for High Impedance Rendering of Series Elastic Actuator. IEEE Robot. Autom. Lett. 2024, 9, 3601–3608. [Google Scholar] [CrossRef]
- Yu, N.; Zou, W.; Tan, W.; Yang, Z. Augmented virtual stiffness rendering of a cable-driven SEA for human-robot interaction. IEEE/CAA J. Autom. Sin. 2017, 4, 714–723. [Google Scholar] [CrossRef]
- Haddadin, S.; De Luca, A.; Albu-Schäffer, A. Robot collisions: A survey on detection, isolation, and identification. IEEE Trans. Robot. 2017, 33, 1292–1312. [Google Scholar] [CrossRef]
- Griggs, W.M.; Anderson, B.D.; Shorten, R.N. A test for determining systems with “mixed” small gain and passivity properties. Syst. Control Lett. 2011, 60, 479–485. [Google Scholar] [CrossRef]
- Xia, M.; Antsaklis, P.J.; Gupta, V.; Zhu, F. Passivity and dissipativity analysis of a system and its approximation. IEEE Trans. Autom. Control 2016, 62, 620–635. [Google Scholar] [CrossRef]
- Huang, Y.; Huang, Q. Interaction Stability Analysis from the Input-Output Viewpoints. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 7878–7884. [Google Scholar]
- Huang, Y.; Li, S.; Huang, Q. Robust impedance control for SEAs. J. Frankl. Inst. 2020, 357, 7921–7943. [Google Scholar] [CrossRef]
- Huang, Y.C.; Shao, N.F. LMI-based impedance control synthesis: A case study on fixed-stiffness actuators (FSAs). Int. J. Control 2023, 96, 2945–2957. [Google Scholar] [CrossRef]
- Huo, L.; Qu, C.; Li, H. Robust control of civil structures with parametric uncertainties through D-K iteration. Struct. Des. Tall Spec. Build. 2016, 25, 158–176. [Google Scholar] [CrossRef]
- Keemink, A.Q.; Van der Kooij, H.; Stienen, A.H. Admittance control for physical human–robot interaction. Int. J. Robot. Res. 2018, 37, 1421–1444. [Google Scholar] [CrossRef]
- Packard, A.; Doyle, J. The complex structured singular value. Automatica 1993, 29, 71–109. [Google Scholar] [CrossRef]
- Skogestad, S.; Postlethwaite, I. Multivariable Feedback Control: Analysis and Design; John Wiley & Sons: Hoboken, NJ, USA, 2005. [Google Scholar]
- Colgate, J.E.; Hogan, N. Robust control of dynamically interacting systems. Int. J. Control 1988, 48, 65–88. [Google Scholar] [CrossRef]
- Colgate, E.; Hogan, N. An Analysis of Contact Instability in Terms of Passive Physical Equivalents. In Proceedings of the 1989 International Conference on Robotics and Automation, Scottsdale, AZ, USA, 14–19 May 1989; pp. 404–409. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Key Characteristics for Robust Stability and Interaction | Limitations and Constraints |
|---|---|---|
| Classical PID [20] | Simple to implement; maintains basic stability under nominal conditions. Suitable for rigid environments with low compliance requirements. | Lacks robustness to model uncertainties and sensor noise; poorly handles dynamic or compliant interaction; sensitive to external disturbances. |
| Adaptive Control [12] | Capable of adjusting to slowly varying system parameters; effective in repetitive tasks with predictable dynamics. | Prone to instability under fast-changing dynamics or impacts; limited in handling high-frequency uncertainties and unmodeled dynamics. |
| Control [21] | Offers guaranteed robustness to bounded unstructured uncertainties; suitable for worst-case disturbance rejection in mid-frequency range. | Design tends to be overly conservative; ignores structured uncertainties; may restrict achievable impedance shaping bandwidth. |
| Sliding Mode Control [10] | Highly robust to matched uncertainties and persistent disturbances; effective in maintaining contact force in uncertain environments. | Discontinuous control induces chattering, leading to mechanical wear and unsafe interaction with soft or delicate environments. |
| Passivity-Based Control [22,23] | Intrinsically stable by enforcing energy dissipation; well-suited for safe interaction with passive or low-stiffness environments. | Cannot handle active or highly dynamic environments; restrictive in rendering high-stiffness or dynamic impedance profiles. |
| -Synthesis [17,18] | Simultaneously accounts for structured uncertainties (e.g., parametric, sensor, and model uncertainties); enables stable and accurate impedance rendering across a broad stiffness range. | Requires detailed uncertainty modeling and high computational cost for controller synthesis; performance depends on accurate frequency domain characterizations. |
| Parameter | Symbol | Nominal Value | Uncertainty/Notes |
|---|---|---|---|
| Joint inertia | 0.29 | ||
| Torque sensor inertia | |||
| Link inertia | 0.06 | ||
| Joint stiffness | k | ||
| Joint damping | b | ||
| Actuator gain | 1.0 | Fixed | |
| Actuator time constant | 0.01 | First-order lag | |
| Position noise weighting function | Noise model for position measurement | ||
| Torque noise weighting function | Noise model for torque measurement | ||
| External disturbance weighting function | Disturbance input |
| (Nm/rad) | CF (Hz) | IMA | IMB (Hz) | ST (s) | OS (%) | CLB (Hz) | RCSM | |
|---|---|---|---|---|---|---|---|---|
| 0.027 | 0.089 | 0.024 | 21.43 | 12.52 | 0.035 | 1.52 | ||
| 0.086 | 0.013 | 0.157 | 15.72 | 18.21 | 0.112 | 1.58 | ||
| 1 | 0.272 | 0.006 | 0.252 | 5.89 | 5.13 | 0.327 | 1.81 | |
| 0.861 | 0.003 | 0.511 | 2.43 | 2.75 | 0.854 | 1.75 | ||
| 2.722 | 0.002 | 1.127 | 3.21 | 1.33 | 2.141 | 2.05 | ||
| 8.607 | 0.004 | 7.615 | 9.05 | 1.86 | 8.912 | 2.59 | ||
| 27.22 | 0.007 | 13.78 | 2.04 | 0.23 | 28.37 | 1.12 | ||
| 86.07 | 0.008 | 37.27 | 2.02 | 0.10 | 89.45 | 1.47 | ||
| 860.7 | 0.032 | 859.0 | 2.01 | 0.62 | 865.2 | 1.43 |
| (Nm/rad) | (Nm/(rad/s)) | IMA (CIC) | IMA (RIC) | Error Reduction (%) |
|---|---|---|---|---|
| 1 | 50 | 0.9914 | 0.4425 | 55.36 |
| 100 | 0 | 0.4380 | 0.0023 | 99.47 |
| 100 | 50 | 0.4630 | 0.0042 | 99.09 |
| 10,000 | 0 | 1.7966 | 0.1994 | 88.90 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shao, N.; Huang, Y.; Hong, D.; Zhong, W. Design and Performance Evaluation of a μ-Synthesis-Based Robust Impedance Controller for Robotic Joints. Actuators 2025, 14, 266. https://doi.org/10.3390/act14060266
Shao N, Huang Y, Hong D, Zhong W. Design and Performance Evaluation of a μ-Synthesis-Based Robust Impedance Controller for Robotic Joints. Actuators. 2025; 14(6):266. https://doi.org/10.3390/act14060266
Chicago/Turabian StyleShao, Nianfeng, Yuancan Huang, Da Hong, and Weiheng Zhong. 2025. "Design and Performance Evaluation of a μ-Synthesis-Based Robust Impedance Controller for Robotic Joints" Actuators 14, no. 6: 266. https://doi.org/10.3390/act14060266
APA StyleShao, N., Huang, Y., Hong, D., & Zhong, W. (2025). Design and Performance Evaluation of a μ-Synthesis-Based Robust Impedance Controller for Robotic Joints. Actuators, 14(6), 266. https://doi.org/10.3390/act14060266