1. Introduction
The human hand is a result of biological evolution, which is responsible for designing a dexterous, multi-functional tool over several million years. Its structure enables precision, power, and compliance, and thus, providing a role model for a gripper design that we are familiar with from our everyday life [
1]. Such anthropomorphic grippers can be used as prostheses; are compatible with a human-oriented environment, like ergonomic tools; or can be intuitively teleoperated by humans, e.g., operated in hazardous environments without risking one’s health [
2].
Throughout the last century, Piazza et al. have reported on the development of over two hundred robotic hands of different types [
3]. Robotic hand designs vary widely across the spectrum from rigid to soft, with hybrid approaches gaining traction in recent years. Notable examples of classic hand grippers made of rigid machined part and characterized by precision and predictable movements [
4] are the SpaceHand [
4], the Shadow Dexterous Hand [
5], or the Schunk SVH [
6]. The SpaceHand is a space-qualified robotic hand that is able to work in harsh conditions to assist astronauts [
4]. The Shadow Dexterous Hand is a tendon-driven, five-fingered hand that is claimed to be the most advanced robotic hand available, with the possibility to equip it with tactile sensing [
5]. The Schunk SVH is a highly complex robotic hand with nine drives and gear transmission [
6]. Others followed an approach of replicating essential biomechanical elements, such as bones, tendons, routing, ligaments, or joints, and developed a highly biomimetic anthropomorphic robotic hand [
7]. The concept of so-called hand synergies has been successfully engineered by others, leading to a drastic reduction in the number of actuators. As a result, The Pisa/IIT SoftHand 2 has been developed, featuring only two drives while demonstrating impressive in-hand manipulations [
8]. Deimel and Brock have developed the RBO Hand 2, a fully compliant soft robotic pneumatically driven hand capable of dexterous grasping. It achieves 94% of the postures from the human grasp taxonomy and scores 7 out of 8 points in the Kapandji test (thumb test) [
9].
In a world of the increasing importance of human–machine interaction and collaboration, designs like the Schunk SVH or Shadow Dexterous Hand lack inherent compliance and overload protection, and thus, do not assure safety. For this reason, the field of soft pneumatic robotics became a dynamically blooming field generating compliant, life-like solutions, e.g., RBO Hand 2. Unfortunately, on account of the softness, they are usually weaker in producing force and lack mechanical support. This can be solved globally or locally using stiffer silicones or rigid parts. Such soft–rigid hybrid gripper approaches have been developed and studied.
Nemoto et al. reported a lightweight prosthesis driven by curved pneumatic artificial muscles inserted into a realistic plastic hand [
10]. Very similarly, Fras and Althoefer manufactured a fully compliant robotic hand driven by linear pneumatic actuators placed in the fingers of a one-part cast biomimetic hand, which directs linear motion into bending [
11]. Chen et al. presented a robotic finger inspired by lobsters that comprises rigid and soft components. An inflatable hose is enclosed in multiple, rotatably connected rigid shells, which only allow for bending [
12]. Galloway et al. programmed the bending radius and bending axis of a fiber-reinforced soft-bending actuator using a sleeve and fiber-reinforced laminate [
13]. Gafer et al. developed a soft–rigid Quad-Spatula Gripper for food handling with a passively compliant structure and spatula-shaped interlocking fingertips [
14]. Zhu et al. introduced a two-fingered soft–rigid gripper, drawing inspiration from the human metacarpophalangeal (MCP) joint [
15]. It comprises eight independent muscles (four for each finger) and features lateral compliance for in-hand manipulation. The gripper incorporates hinge joints, resulting in conventional kinematics. Godaba et al. designed a tendon-driven two-fingered gripper consisting of pneumatic flexure hinges. The stiffness of these joints can be controlled with pressure, thus allowing different shapes of the finger [
16].
A research gap remains in the development of low-cost, soft–rigid hybrid robotic hands that combine mechanical simplicity, modularity, and ease of tactile sensor deployment on non-deforming surfaces, while also supporting accessible manufacturing techniques and maintaining compliance. Existing rigid hands typically lack inherent compliance, as they are designed for precision and power. The prices for such commercial solutions can easily reach five-digit figures in USD. Tendon-driven hands often exhibit structural complexity due to low-friction cable routing, pulleys, and related mechanisms. Biomimetic approaches—such as those by Xu [
7] and Faudzi [
17], and involving anatomically correct testbed (ACT) hands [
18]—aim to replicate human hand anatomy by incorporating ligaments or preserving specialized geometries, which further increases the mechanical complexity. Zhang made notable progress by simplifying joint geometries while preserving dexterity; however, the resulting design remains mechanically intricate [
19]. Underactuated designs, like the Pisa/IIT SoftHand and Li’s open-source antagonistic tendon-driven hand, simplify control through concepts such as adaptive synergies, yet introduce complex transmission mechanisms [
8,
20]. Fully soft hands, such as the RBO Hand 2, deform internally, making them unsuitable for reliable tactile array testing, as unintentional sensor activation can occur [
9]. Some designs have adopted principles similar to ours. For example, Zhang’s fully 3D-printed hybrid hand is notably simple but relies on multi-material printing, is limited to low-pressure actuation (16 kPa), and is not open source [
21]. Zhu’s design also shares conceptual similarities, using discrete joints that support tactile sensor integration and a pneumatic direct drive for simplified construction. However, it is also closed source and achieves only 60° of joint flexion [
15]. Xu introduced a conceptually similar hand made entirely from silicone, incorporating MCP joints and achieving 90° joint bending. However, it is fully soft, and thus, not ideal for sensor integration, and it also lacks open-source accessibility [
22]. Recent open-source efforts, such as the DexHand [
23], ORCA Hand [
24], and LEAP Hand [
25], have advanced the affordability and replicability. Nevertheless, most of these remain tendon- or motor-driven, and therefore, retain mechanical complexity and limited compliance. In contrast, our work focuses on a mechanically simpler solution. Lobster-inspired actuators, such as those by Chen, offer discrete joint-like sections but suffer from limited passive extension due to their rigid shells and rely on multiple joints rather than a few human-like segments [
12]. Similarly, Galloway’s fiber-reinforced actuators [
13] support programmable curvature but require high pressures (∼400 kPa) to achieve 90° bending and do not follow simple forward kinematics.
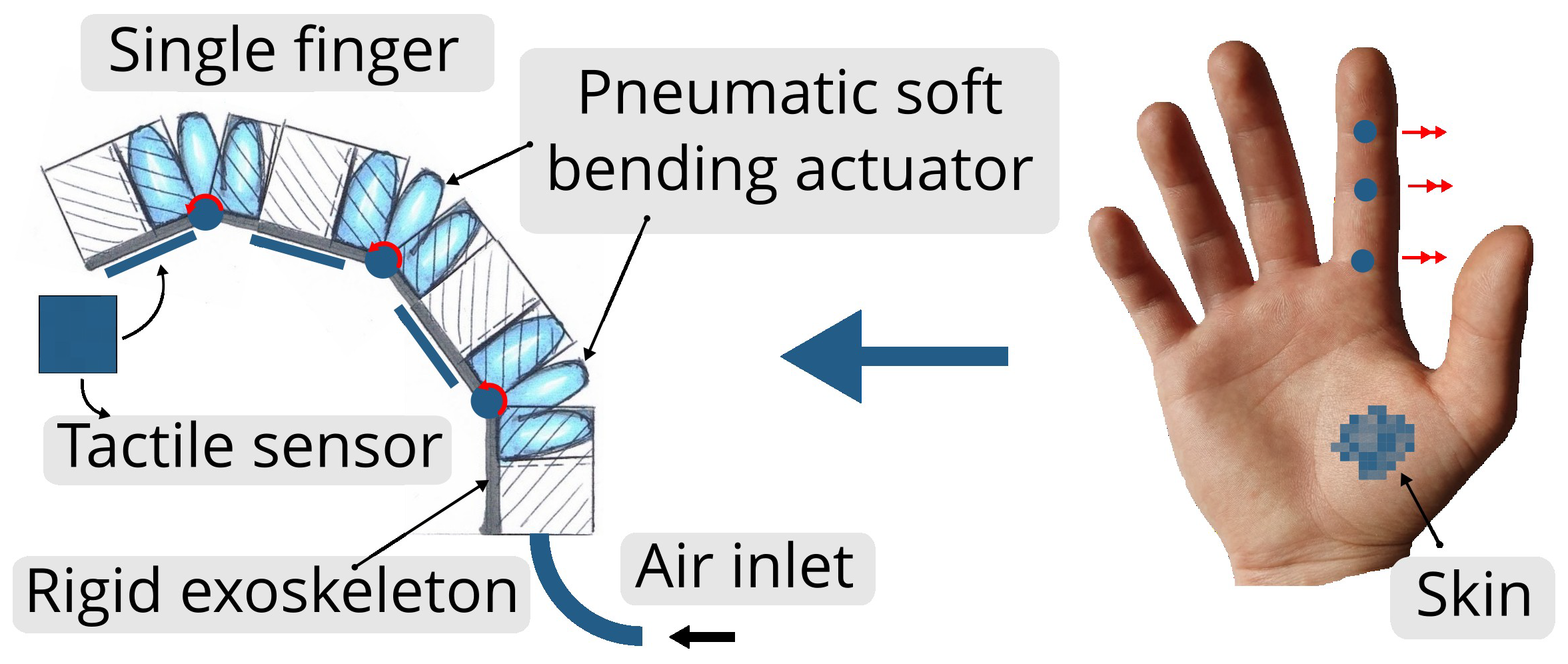
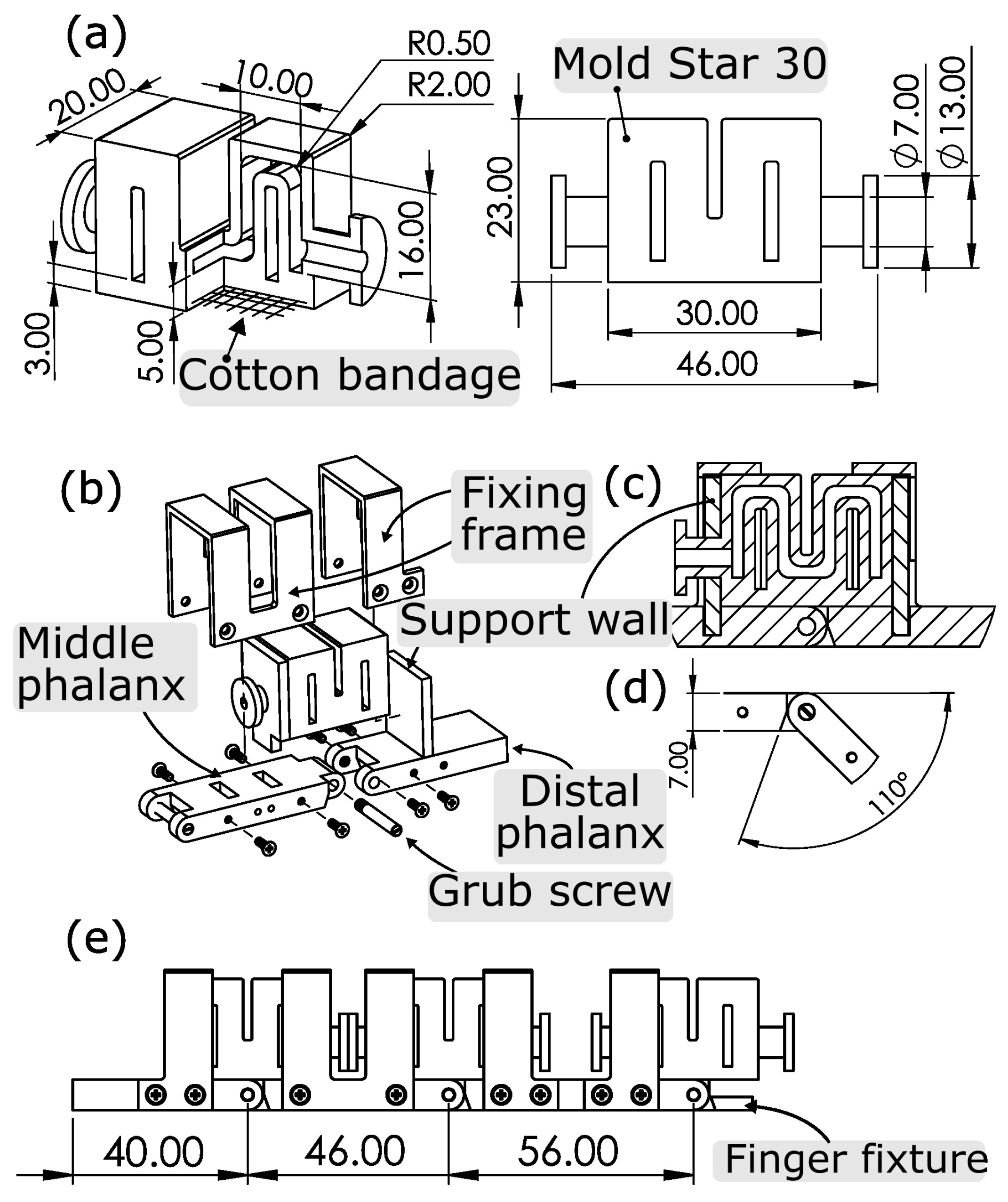
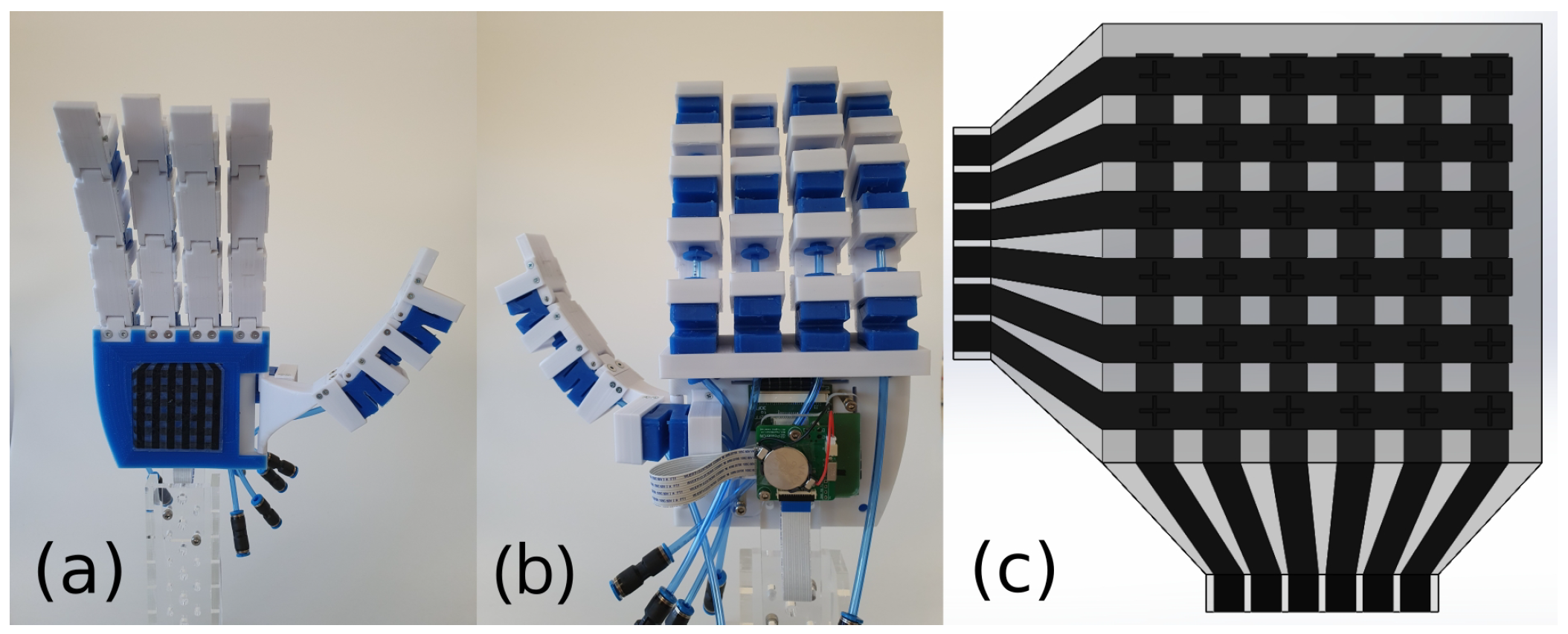
In this paper, we report a low-cost do-it-yourself (DIY) prototype of a soft–rigid hybrid anthropomorphic gripper. The five-fingered hand can be manufactured using fused deposition modeling (FDM) and silicone molding methods. As one of the first testing platforms for PowerON’s resistive tactile sensors, the robotic hand has big spaces on the finger links and on the palm of the hand to accommodate the sensors. These rigid skeletal elements connected with hinge joints give mechanical support, follow forward kinematics, and focus the movement of the pneumatic soft bending actuators, which directly drive the robotic hand. Furthermore, the rigidity will prevent deformation of the finger links, and thus, unintended activation of the sensor. In the first step, we only integrated the tactile sensor array in the palm of the hand and demonstrated position recognition of an object and reflexive features, such as catching a falling object. Due to the compressibility of pneumatic soft bending actuators, we were able to simplify the control system by reducing the number of pneumatic lines while maintaining the joint’s adaptivity to grasped objects. We propose a mechanical model of a single finger for future control, which can be extended further for complete hand control. We demonstrate the hand’s capability to perform precision grips using both two and three fingers with lateral and strong grip types. We present comprehensive insights into the gripper’s design and manufacturing process. Additionally, we report on conducted experimental investigations involving both individual joints and the hand as a whole. Moreover, we provide a description of our mobile five-channel pneumatic platform and current control schematics. Finally, we share CAD models of a single actuated joint that serve as building blocks and toolkit components for constructing various types of robotic structures, including human-like grippers, two-fingered grippers, or even terrestrial robots.
This paper addresses the lack of accessible, modular, and sensor-ready soft robotic platforms that combine compliance, mechanical robustness, simplicity, and practical usability. While many advanced robotic hands exist, they are often prohibitively expensive, difficult to modify or build due to closed-source designs, and do not provide suitable surfaces for integrating tactile sensors. We propose a low-cost, modular, soft–rigid hybrid joint design that follows simple forward kinematics and is manufactured using accessible techniques, such as FDM printing and silicone molding. The rigid skeleton provides mechanical support, guides the actuator motion, and offers integration space for tactile sensors while effectively isolating them from actuator deformation and unintended activation. The soft actuators, in turn, ensure adaptive and compliant interaction with the environment. The novelty of our work lies in the unique combination of affordability, a straightforward hybrid mechanical design, simplified pneumatic control, and sensor-compatible architecture, offering a practical and customizable gripper for research, education, and real-world applications.
4. Results
4.1. Mechanical Model of the Finger
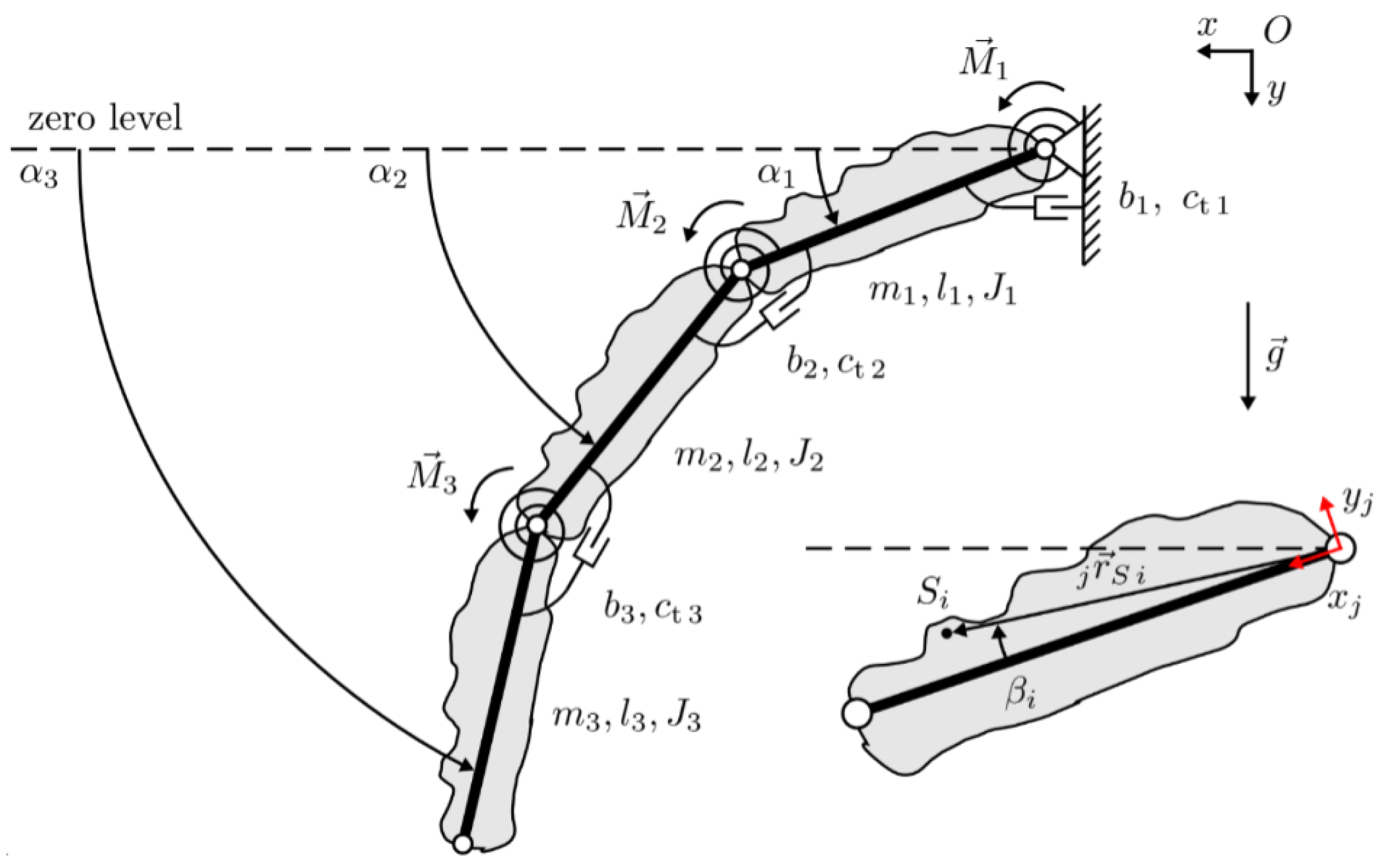
Here, a mechanical model of the robotic finger is proposed (see
Figure 12), which is intended to serve as a basis for developing a control system for the finger and, subsequently, the entire hand. Equations of motion are derived. The model represents a triple physical pendulum. The grey pendulum links with a continuous black rod are rigid bodies that represent the finger links of the robotic finger. Each finger link has a mass
, a moment of inertia
, a length
, and a center of gravity
. In addition to the overall structure of each finger link, the masses
and the moments of inertia
take into account the pneumatic compliant actuators, which are not listed as separate elements for simplicity. Furthermore, they should be included in the coordinates of the centers of gravity
, whose positions are generally formulated and, therefore, arbitrary. The length of the vector
and the offset angle
describe the positions of the centers of gravity. The left index stands for a coordinate system specific to each link and is positioned in the joint on which the link hangs. Its x-axis always follows a straight line along the link to the next joint, and the y-axis is perpendicular, as indicated in red in
Figure 12. The link lengths
of the pendulum extend in a straight line between the rotation points. The torques
,
, and
represent pressure-dependent torques generated by the actuators. The angle dependency of the torques is neglected in the first approximation. The spiral symbols in
Figure 12 represent torsion springs with the torsion spring stiffnesses
, which model the pressure-dependent torsional stiffnesses of the actuators mounted on the joints. The joint friction is taken into account by damping
. To generalize the model, the pressure dependencies are omitted.
The Lagrangian formalism is used for the derivation of the equations of motion, which is described, e.g., by Janschek [
33]. For this purpose, the Euler–Lagrange equations of the second kind are used:
where the Lagrangian function is given by
Here,
denotes the generalized coordinates,
represents the generalized external forces, and
represents the dissipative forces. First, the kinetic coenergy
and the potential energy
V need to be established, from which the Lagrangian function is composed. The mechanical model can be described using three independent minimal generalized coordinates
, as indicated in
Figure 12. The rigid body motion always includes translational and rotational components, which must be taken into account when establishing the kinetic coenergy
with respect to the center of mass. For this purpose, the position vectors
to the center of masses of the finger elements are first determined:
With the chosen minimal generalized coordinates
,
, and
, the equations for the kinetic coenergy can be written as
and the potential energy can be written as
The reference level for calculating the potential energy is indicated in
Figure 12. To formulate the potential energy in general terms, angles
,
, and
are introduced to describe the rest positions of the finger elements. In this case, they are all zero, which is achieved by choosing a coordinate system. The angles of the rest positions are defined absolutely from the dashed line to the corresponding finger element. Then, the Lagrangian function
L can be established by substituting Equations (
6) and (
7) into Equation (
2). The Lagrangian function, along with the generalized applied forces
and the dissipative forces
with the Rayleigh dissipation function
can now be substituted into Equation (
1) to calculate the equations of motion for the motion directions
,
, and
. Due to the computational complexity, the calculations are implemented and computed in a computer algebra system (CAS).
4.2. Angular Displacement–Pressure Characteristic of a Joint
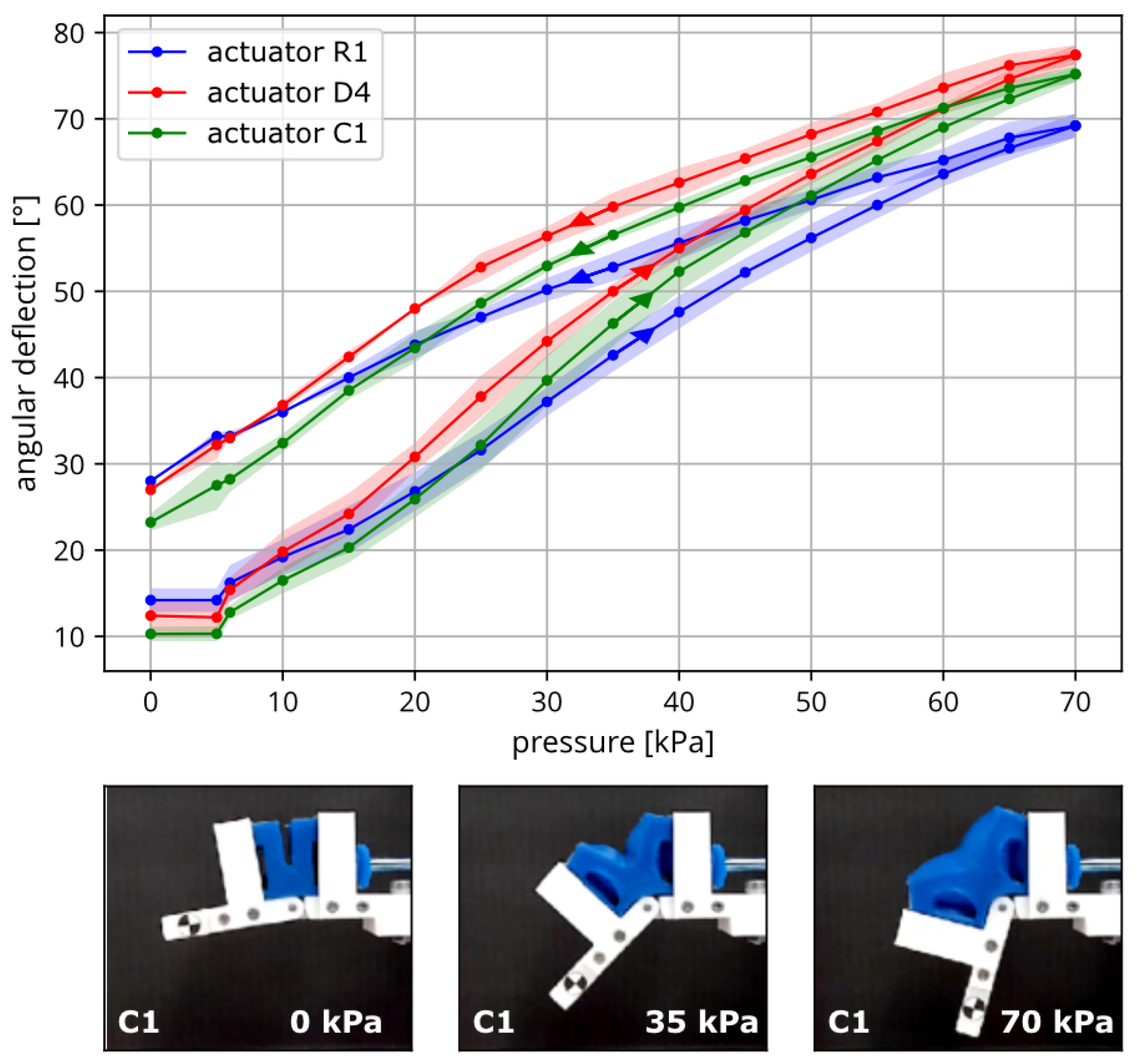
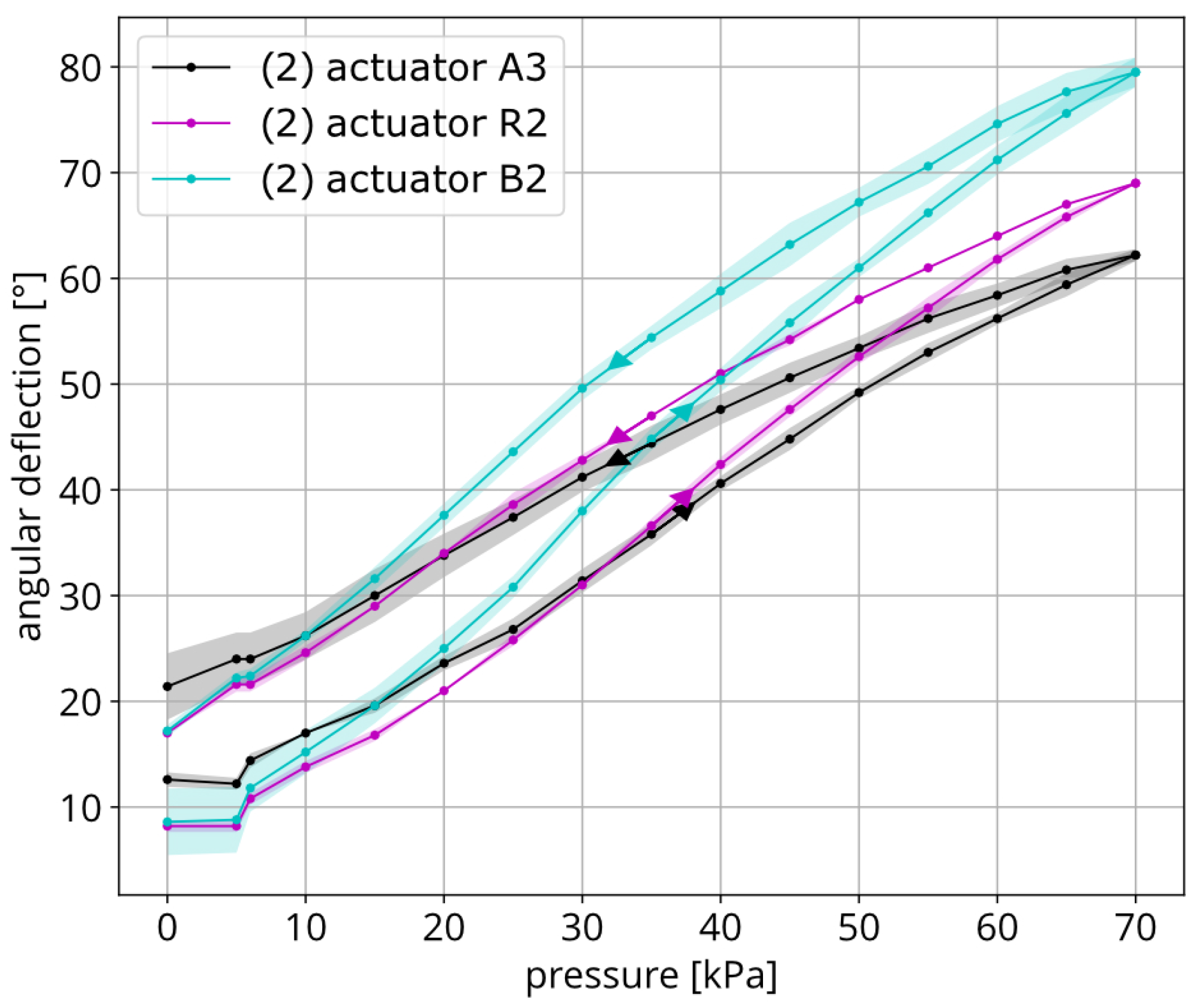
Six actuator specimens were examined for the angular deflection versus pressure response: three with one connection (R1, D4, C1) and three with two connections (A3, R2, B2). The pressure was incrementally increased in each actuator and decreased afterward, as indicated in the diagrams by an arrow pointing up and down. At first, we observe a nonlinear dependence of the angular displacement to pressure in
Figure 4 and
Figure 5, which can be explained by the nonlinear stress–strain behavior of Mold Star 30. Hysteresis was observed in all the actuators studied, which means that the deflection angle varied depending on the inflation and deflation. The cause was friction at the contact between the compliant pneumatic actuator and surrounding rigid parts. When pressurized with compressed air, the actuator moves out of the frame and does not return to the initial state when the pressure is released because the friction prevents it. Each actuator specimen shows a slightly different curve, especially in
Figure 5, the cause of which can be attributed to repeatability in manufacturing the actuators. The maximum difference in angular displacement was 17.3° and occurred at 70 kPa. When comparing the results of the actuators with one port shown in
Figure 4 and the actuators with two ports shown in
Figure 5, no trends can be identified that would indicate the different behavior of these two actuator variants. Actuator B2 with two ports achieved a maximum angular displacement of 79.5° from the studied actuators. The maximum expanded uncertainty reached ±3.14°. Actuator R2 showed the lowest expanded uncertainty of ±1.12°, which shows that improvement is possible.
Hysteresis in the angular deflection–pressure characteristics of the actuator is influenced by both viscoelastic material behavior and mechanical boundary conditions, particularly friction and wall deformation. Measures should be taken to ensure that the friction conditions are implemented in a more defined and controlled manner, although achieving and accurately measuring such conditions remains challenging. The following discusses specific issues observed in the current setup, along with corresponding design recommendations for reducing the hysteresis.
First, the bulging of the actuator walls opposite the support walls may increase the deflection of the finger joint, but it also causes the actuator to shift out of the mounting frame. Due to the current tight fit and the resulting increased friction, the actuator cannot easily return to its original position. Bulging could be mitigated by making the wall stiffer or bonding it to the frame, which would reduce the hysteresis. The tight fit is partly a result of general dimensional constraints. However, it has also been observed that the actuators are approximately 1 mm wider than intended. Reducing the dimensions of the main body would help restore the intended fit.
Second, while increasing the gap between the actuator and the frame reduces friction and allows the actuator to move more freely, it also increases the risk of slippage. To address this, the fixing frame should be extended to better contain the actuator and prevent it from slipping out during operation. A potential design solution is to surround more of the actuator while still allowing a loose internal fit. This should help limit the hysteresis, but it eliminates the passive extension capability of the joint. Another idea is to fix the silicone actuator to the rigid parts using form-fit fixing points, thereby ensuring it returns to its original position.
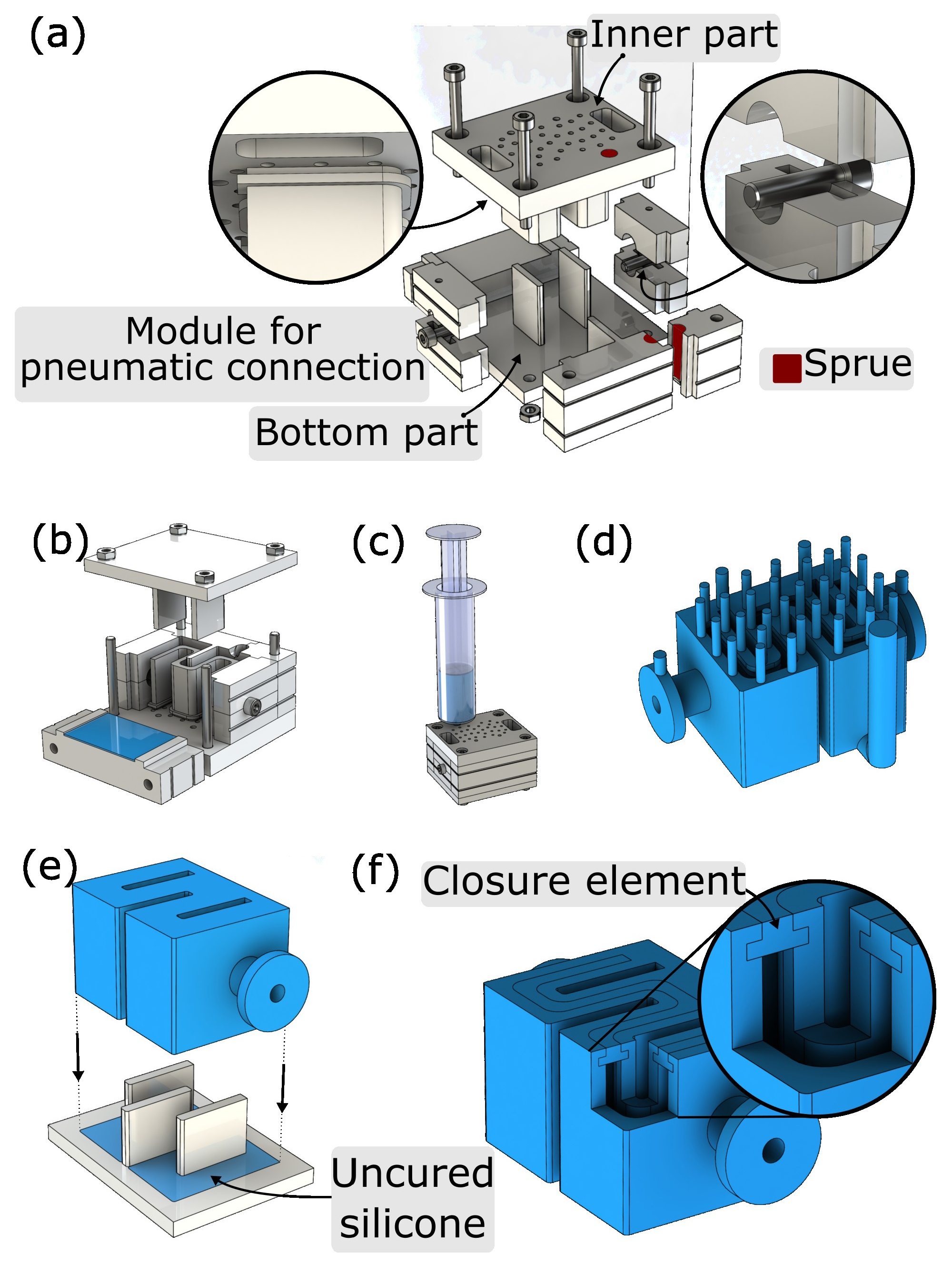
With regard to the manufacturing process, the side wall of the actuator, which is sealed in a subsequent step, should be carefully examined for its geometric consistency. The cutout used to seal the side wall may benefit from modification to allow for a uniform and consistent distribution of silicone. To facilitate this, the protruding walls could be designed to be removable, enabling even silicone distribution with the aid of a squeegee. However, achieving complete symmetry remains challenging, as the inner shape cannot be formed as precisely as the opposing side, which is created using the inner core. This issue could be addressed by adapting the manufacturing process so that both side walls are produced using the same method, thereby improving the symmetry.
4.3. Blocking Force–Pressure Characteristic of a Joint
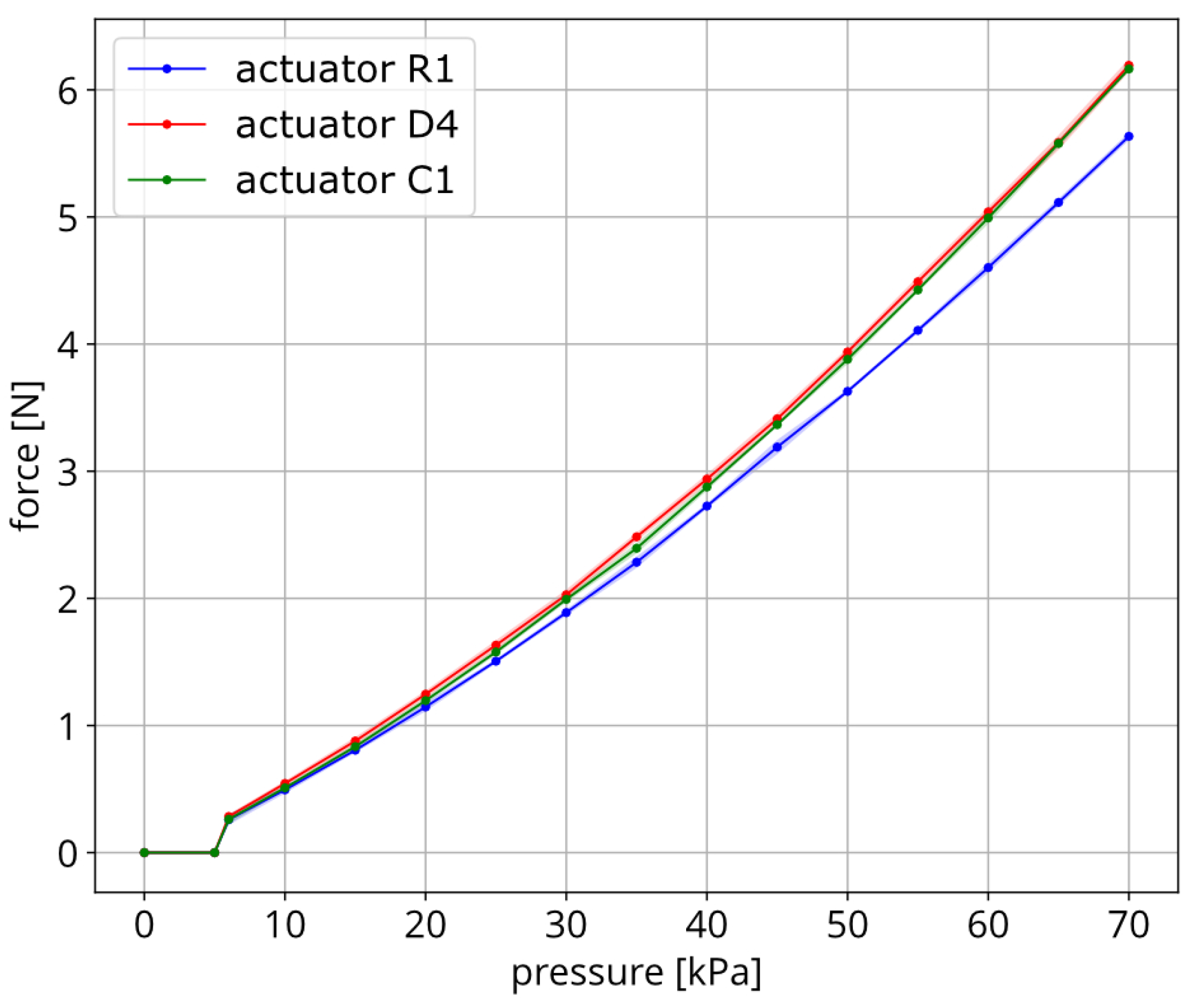
We studied the identical actuator specimens with one connection (R1, D4, C1), as in
Section 4.2, and the recorded data are shown in
Figure 6. The maximal blocking force reached by the actuator D4 was 6.19 N at 70 kPa, which was the final value of the pressure range studied. The repeatability of each sample was in the range of ±0.06 N, which corresponded to the value of maximum expanded uncertainty and included 97.5% of the values. One of the actuators performed visibly worse than the remaining two and reached a blocking force of 5.63 N.
In conclusion, the results demonstrate a consistent increase in the blocking force with applied pressure, with good repeatability among the actuator samples. The performance of two out of three actuators indicates reliable functionality, while the lower output of one sample suggests the need for tighter quality control or further investigation into variability. Since the maximum pressure tested was 70 kPa and the force output had not plateaued, further testing at higher pressures could help determine whether a saturation point exists for this actuator design.
4.4. Fingertip Force Benchmarking
The measured blocking force of a single joint was used to estimate the total fingertip force of the finger. Based on the joint geometry, this corresponded to a torque of
. Assuming equal torques across all three joints and known distances from each joint to the fingertip (
m,
m,
m), the fingertip force was calculated by summing the torques divided by their respective lever arms:
. This estimated value at 70 kPa is used in
Table 1 to benchmark the fingertip force performance of the proposed system against related work.
4.5. Grasp Variety
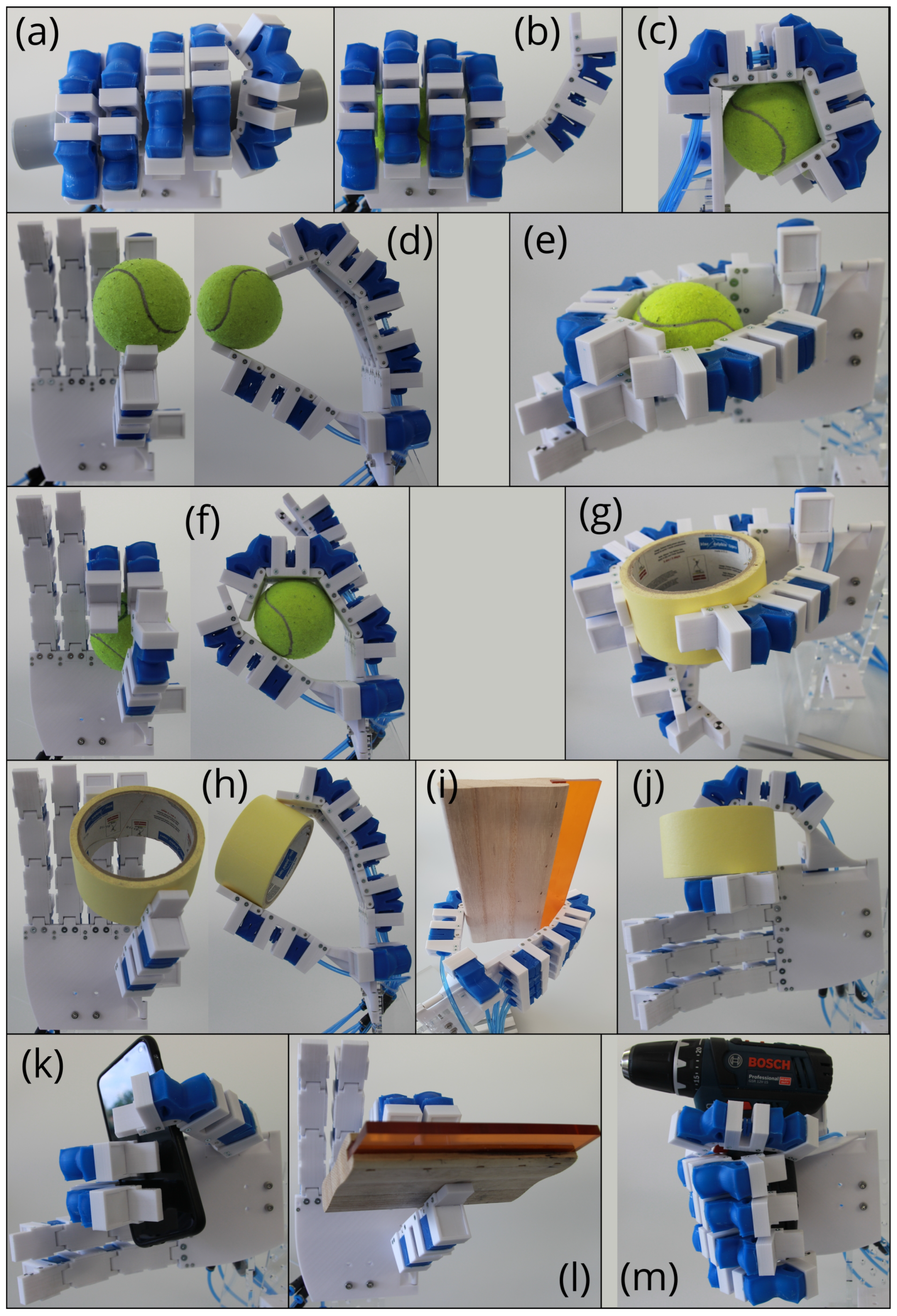
The hand’s gripping ability was tested upright and horizontally with six different objects of different shapes, sizes, and weights. The results are documented in
Figure 13. Objects were given to the hand and its fingers were operated by manually adjusting the pressure to reach the desired position, as shown in
Figure 11. The robotic gripper performed a two-finger precision grip (
Figure 13d), a three-finger precision grip (
Figure 13h,l), a side grip (
Figure 13j), and a strong grip (
Figure 13a–c,m).
Figure 13f,g,i,k show how joints controlled with the same channel perform a different flexion upon contact with an object, which is due to the inherent softness of soft pneumatic actuators. In some cases, however, it would be advantageous to control some joints separately or to place soft pads on the palm and finger surfaces. In
Figure 13h, for example, it can be observed how the index finger lost contact with the object as the pressure increased further and more force was introduced via the edge of the finger. In this case, it was advantageous to drive the PIP and/or MCP joints instead of the DIP joint so that the finger end link made sufficient contact. Especially in this control configuration, precise gripping of small objects was only possible with the edge of the finger end link, as shown in
Figure 13d. In this case, it was necessary to mount the soft fingertips to increase the contact area.
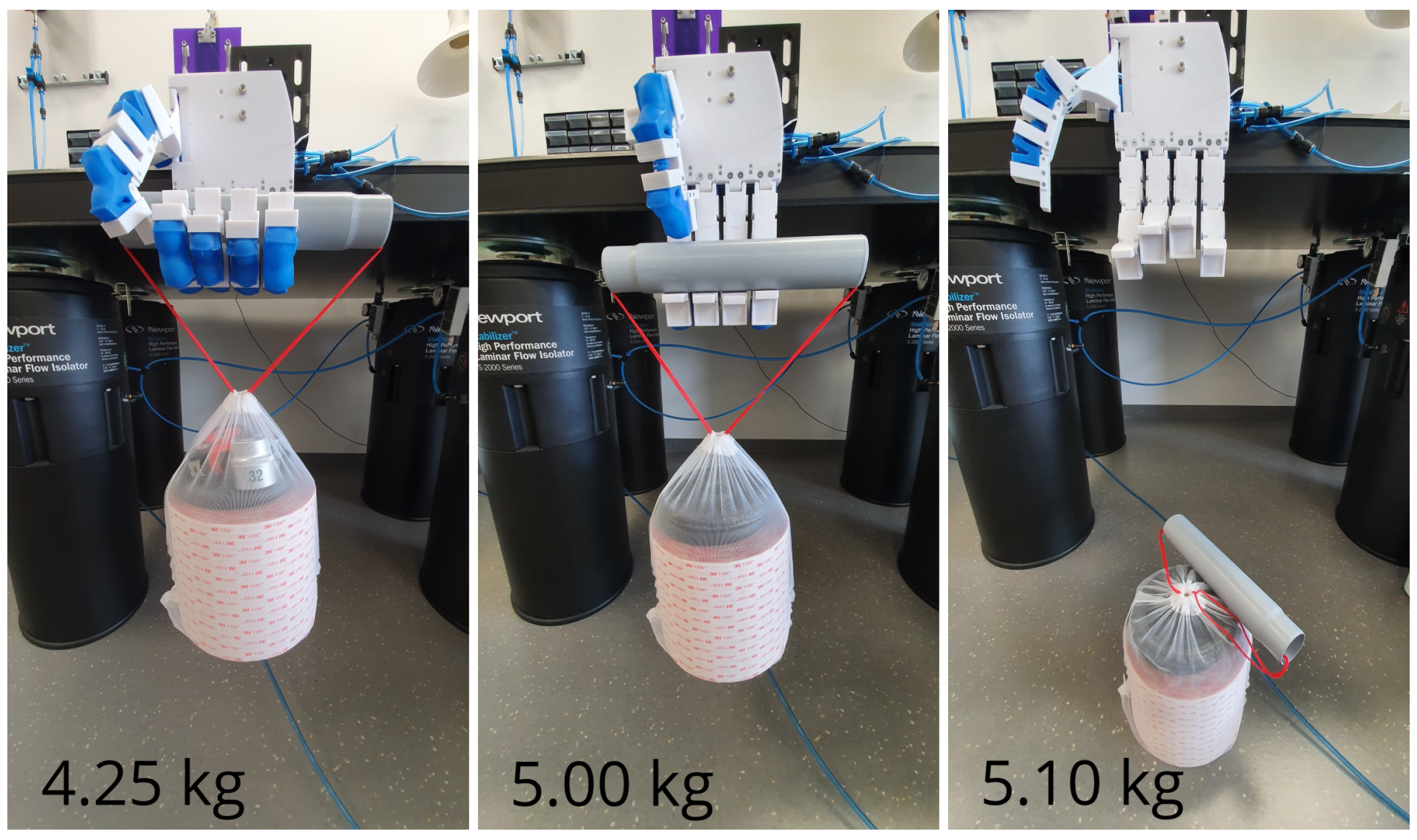
4.6. Weighted Suitcase Grip Test
This section describes a test in which the hand was directed vertically downward to perform a suitcase grip test. A pressure of 80 kPa was applied to the hand. The weights were placed in a bag with a cylindrical handle of relatively large diameter (45 mm) to prevent the bag’s line from becoming wedged in the hand. The hand could stably hold 4.25 kg, as shown in
Figure 14.
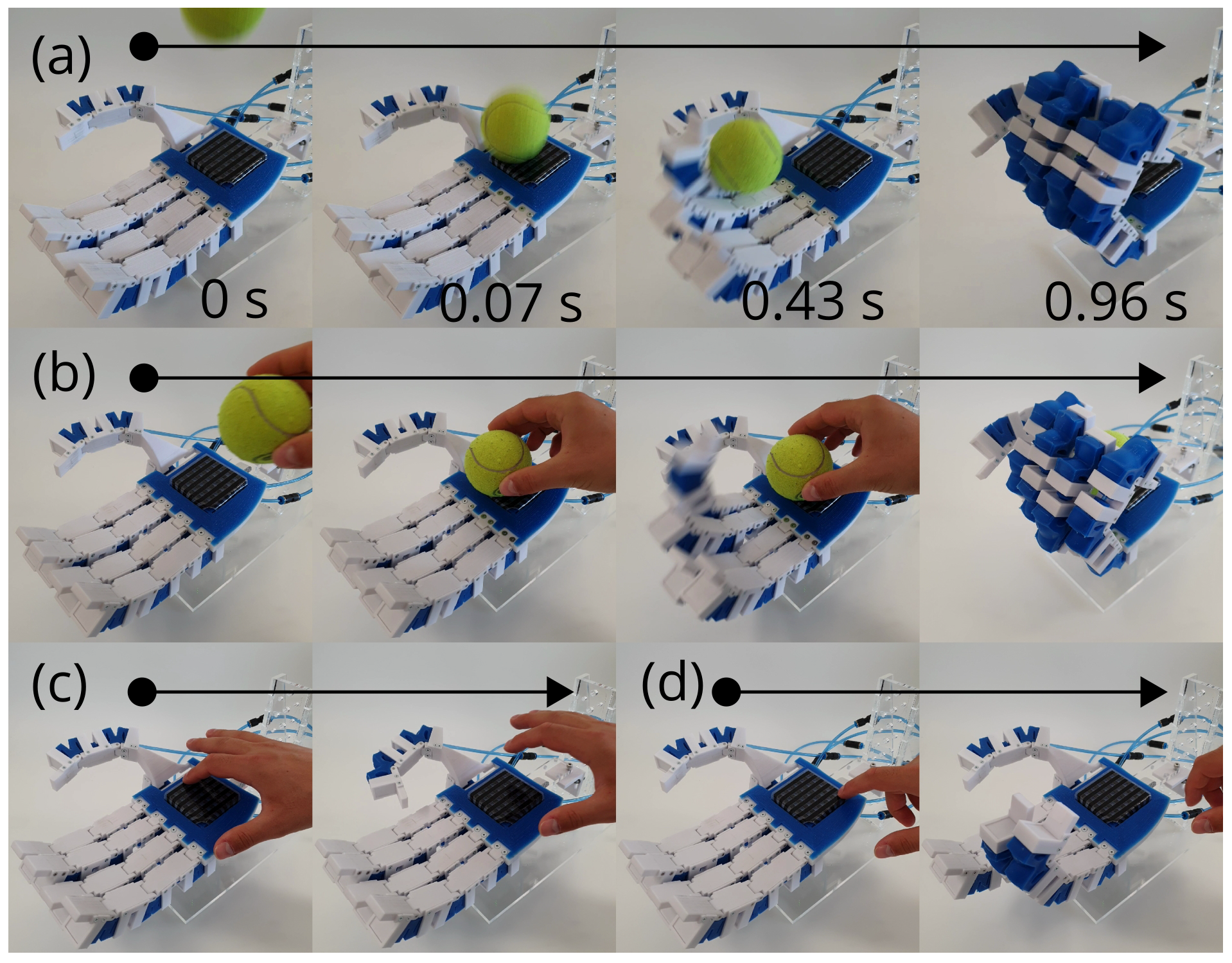
4.7. Demonstrations of Hand Features That Incorporated Tactile Sensor Array
Three demonstrations were programmed and performed. All are shown in
Figure 15, in which the hand (I) detects and catches a falling object, (II) detects the object somewhere on the palm and grasps it, (III) actuates different fingers depending on the row of sensors pressed, thus proving the operation of the sensor array.
Currently, such a sensor array could support vision systems with tactile feedback, e.g., when approaching an object by palpation, but also by giving the hand automatic functions to close the grip. Future enhancements to the tactile sensor array, from a position sensor to small distributed pressure sensors, combined with their integration into the fingers, will enable new functions, such as shape recognition, grip adjustment, weight sensing, and preventing the hand from exerting high forces and crushing objects.
6. Discussion
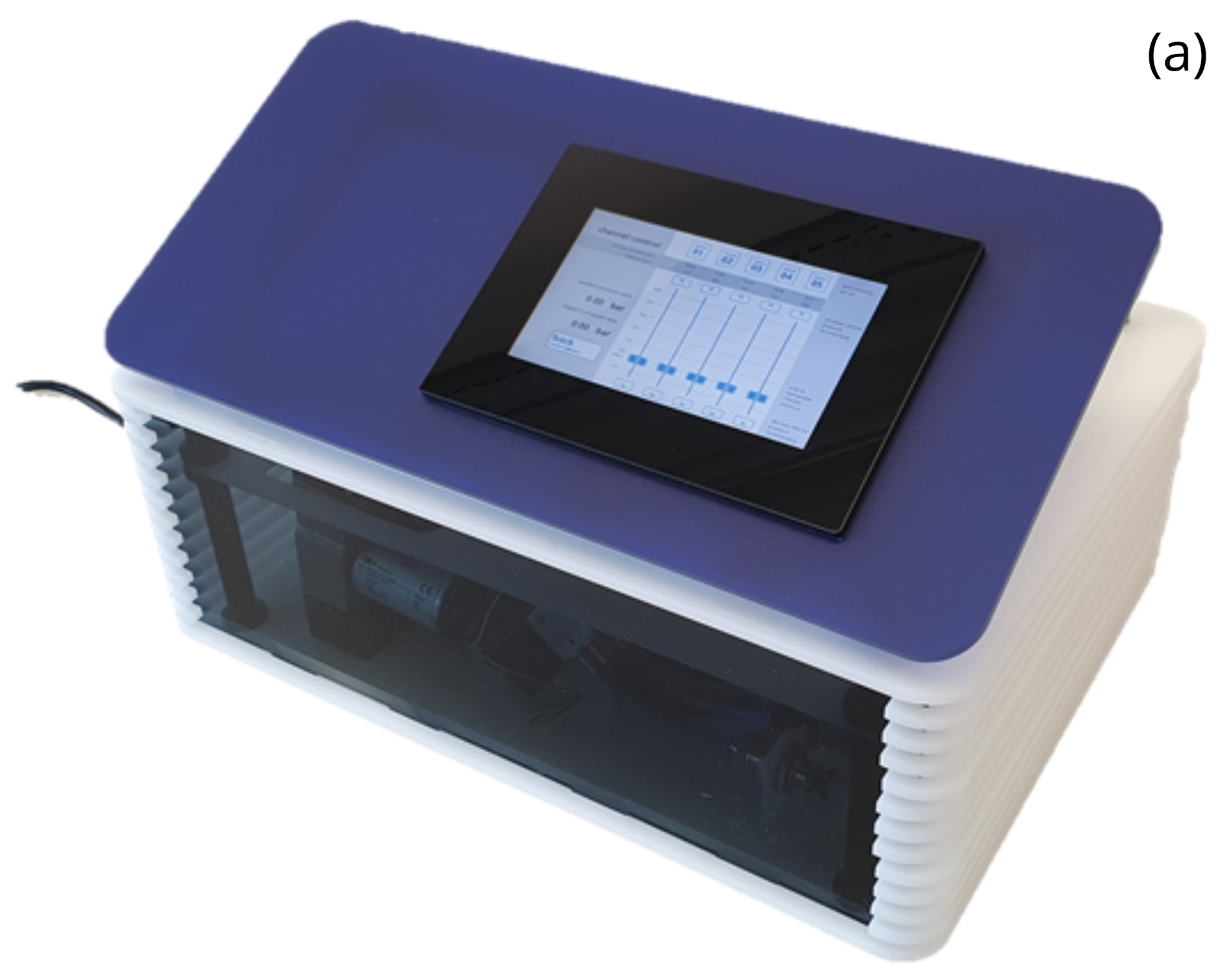
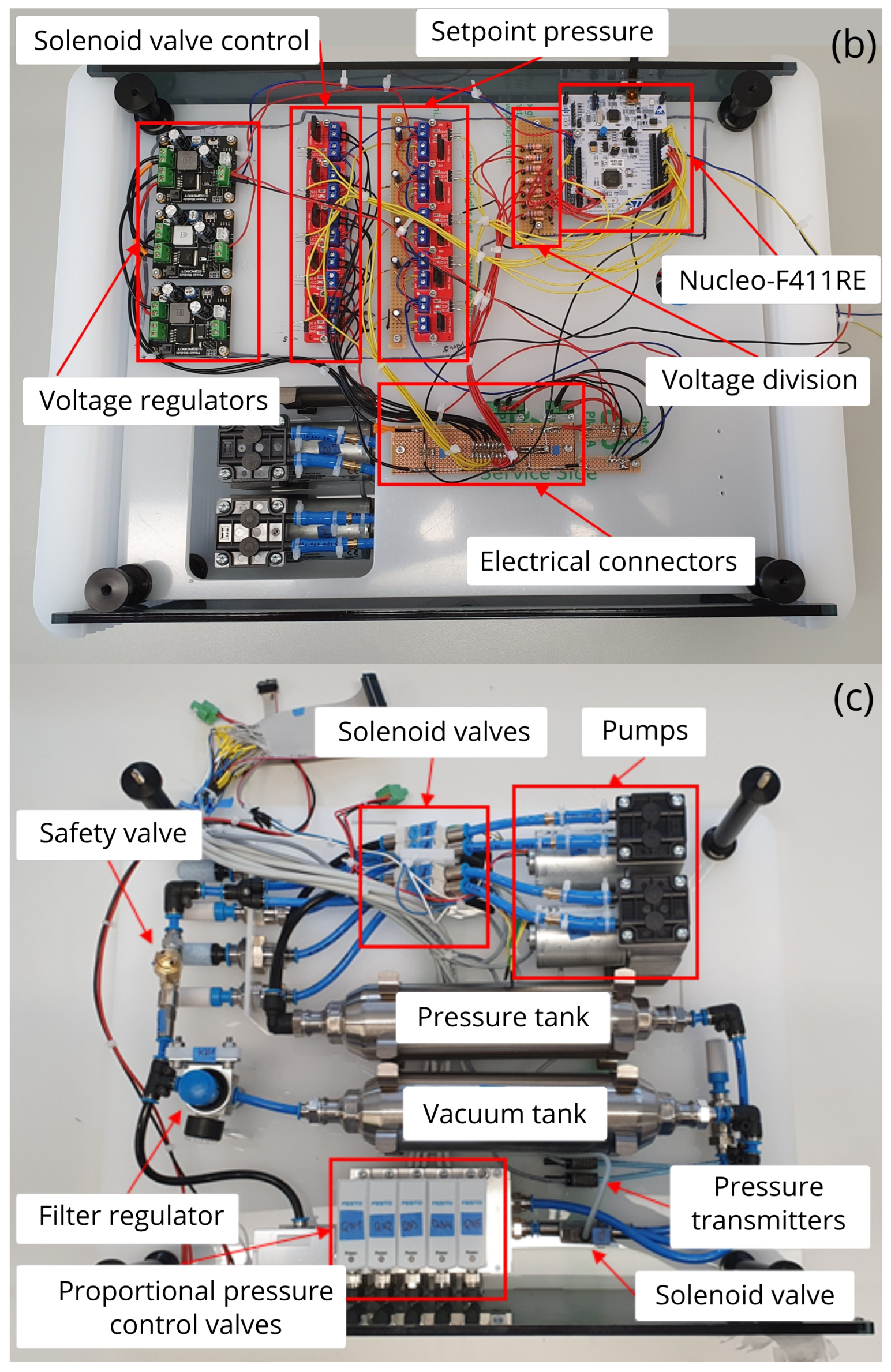
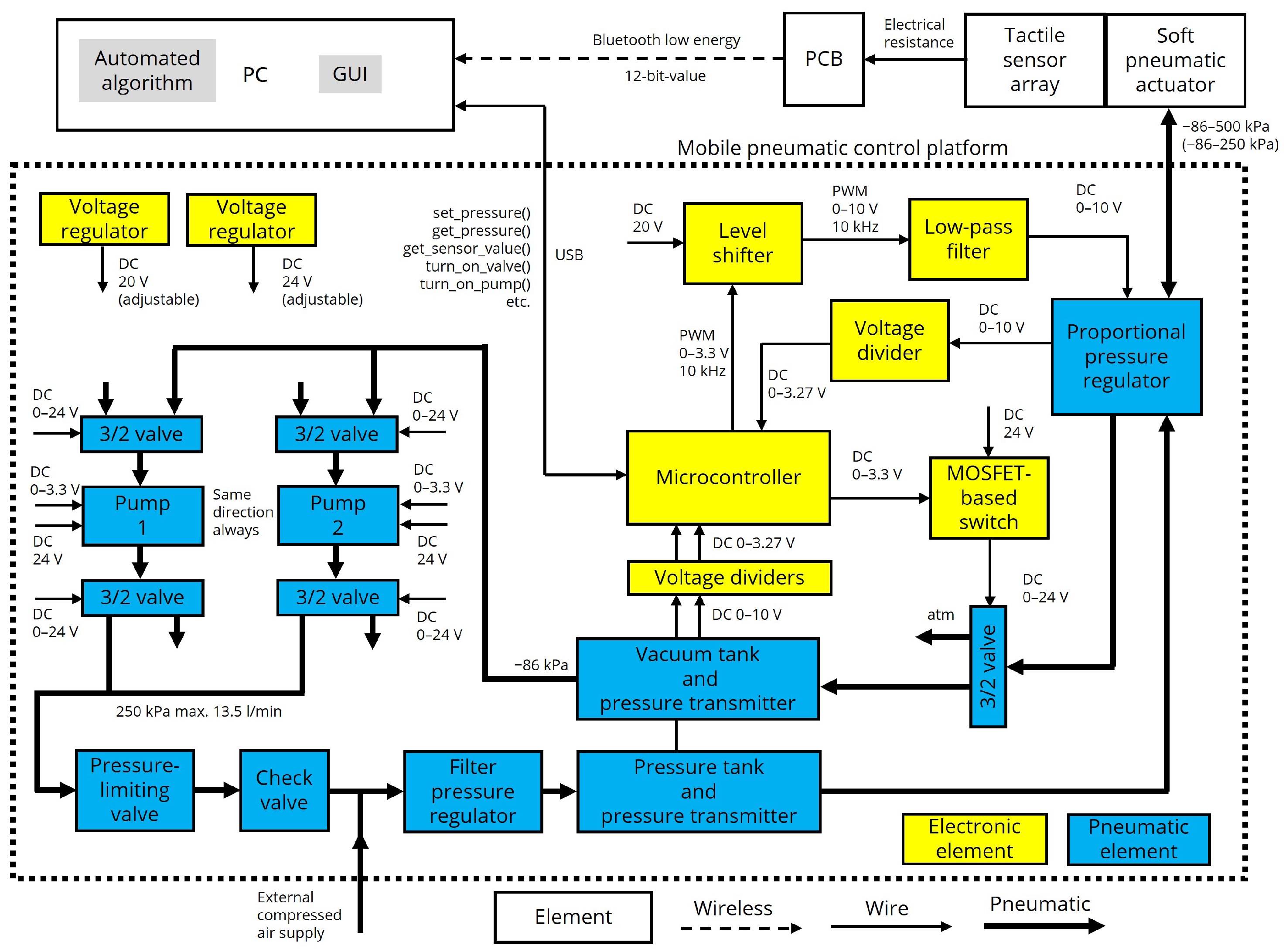
This work presents a low-cost prototype of a soft–rigid hybrid anthropomorphic robotic gripper, which can be completely built using FDM and molding methods. This is an alternative to robotic hands available on the market, which are generally very expensive and unaffordable for every researcher or startup. The five-fingered gripper is directly driven by 15 soft pneumatic bending actuators placed on each joint but controlled by five pressure-controlled lines. The compressibility of the pneumatic bending actuators enables each joint to achieve different bending angles, depending on the objects being gripped or the environmental constraints, even when pressurized by the same control line. Thus, the actuators do not have to be controlled separately, significantly simplifying the control. In contrast to conventional robotics, we pursued a combination of soft and rigid parts to maintain adaptability but keep the structure more mechanically stable by using rigid parts. The skeleton structure defines the otherwise infinite degrees of freedom of soft pneumatic actuators and focuses the motion they generate. As it is intended to be a testing platform for tactile sensor arrays, our robotic hand is characterized by large rigid surface areas on the phalanges for placing sensors, which could be achieved using hinge joints. The rigidity of the phalanges prevents the unintended activation of the tactile sensor arrays, which could be caused by the environment or by the pneumatic bending actuators. In this work, only a resistive tactile sensor was integrated into the palm of the hand. Joints with discrete rotation points simplify the kinematics of pneumatic soft bending actuators to forward kinematics. For the development of future control, we propose a mechanical model that first describes the behavior of one robotic finger and provides the equations of motions. The parameters of the mechanical model, e.g., spring stiffness, damping, or torques, have not yet been calculated or estimated experimentally and have to be determined. The robotic hand and a single joint were experimentally investigated. As a result, the gripper could grasp objects of different shapes and sizes, even though it was controlled with five air channels, but the integration of finger pads would improve the performance. From a strength standpoint, the hand held 4.5 kg in the weighted suitcase test, where the hand hung with the fingers pointing down. At the maximum test pressure of 70 kPa, a single joint achieved a maximum blocking force of 6.19 N and a maximum angular displacement of 79.5°, which was different from the desired 90°. However, the pressure could be further increased to reach the desired maximal angular deflection. When we examined a single joint, we found poor reproducibility regarding angular displacement, which we attribute to the second general manufacturing step of the pneumatic soft bending actuators. In this step, the actuator was dipped in silicone to close the remaining sidewall, the shape and dimensions of which could not be controlled well. We tended to have better reproducibility in terms of the blocking force. With an integrated resistive sensor array on the palm of the hand, we demonstrated reflexive features and position sensing. We demonstrated that the hand could grasp falling objects or perceive and grasp objects it touched with the help of the tactile sensor. In order to fully exploit the potential of the sense of touch, sensors must also be integrated into the fingers, and further investigations must be carried out. We have also presented our mobile pneumatic control platform with detailed information about its pneumatic and electric circuits. Finally, we provide CAD files for manufacturing a single soft–rigid hybrid pneumatic joint, which can serve as a building block and accelerate the design of robotic structures.


 ,
, 


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}