1. Introduction
Leg design for humanoid robots with the goal of achieving human-like locomotion poses major difficulties in structural and actuator design [
1,
2]. Many state-of-the-art humanoid robots such as Atlas [
3], ASIMO [
4], LOLA [
5], TALOS [
6], and Digit [
7] have achieved remarkable advancements in performing versatile and stable bipedal locomotion. However, these robots still fall short of their biological counterparts due to distinct limitations across various aspects, such as energy consumption, locomotion agility, and physical interaction with the environment during highly dynamic locomotion [
8,
9,
10,
11]. Researchers continue to explore strategies to bridge the gap between humanoid robots and humans in achieving human-like locomotion, while balancing energy efficiency, agility, and stability.
The functionality and overall performance of a humanoid robot heavily depend on the design of its robotic legs, as these are the primary components for locomotion. Several technical aspects must be considered during leg development, including mechanical structure, communication architecture, actuators, and sensors. Among these, actuator design plays a crucial role, as actuators are the primary source of motion and force required to perform tasks with the desired efficiency and precision [
12,
13]. Due to the widespread nature of this challenge, extensive literature exists on this topic. For instance, Atlas from Boston Dynamics [
3] and the Festo Bionic Kangaroo [
14] use hydraulic and pneumatic actuators, respectively, to perform highly dynamic maneuvers with outstanding environmental compliance. However, these actuation systems require significantly more energy than their biological counterparts and come with several other drawbacks. In particular, hydraulic actuators are prone to energy inefficiency and maintenance issues such as oil leaks [
15], while pneumatic actuators suffer from low precision, noisy operation, and susceptibility to ambient temperature and pressure changes [
16]. Moreover, both of these actuation types limit the robot’s operational time due to energy inefficiencies and often require tethering the robot to a power source [
16]. Given these limitations, electromechanical actuators have become a popular choice due to their potential for lightweight, energy-efficient, and compact design, and the ability to deliver relatively high peak torque when needed. Notably, the Atlas robot has recently transitioned from hydraulic to electric actuation with the goal of enhancing energy efficiency, strength, dexterity, and agility [
17].
A well-known method for the design of electric actuators (i.e., combination of motor and gearbox) was proposed in [
18], selecting the gear ratio by matching the effective inertia of the motor with the external load. This essentially minimizes the power demand of the chosen motor. However, high energy efficiency typically requires high gear ratios, which hinder fast joint movements and make the leg system undesirable for force/impedance control [
12]. For high-fidelity force control and better compliance, series elastic actuators (SEAs) are used as robotic legs, which integrates an elastic element between the actuator and joint load in series connection [
19,
20]. SEAs enhance stability and adaptability in uneven terrain, improve energy efficiency, absorb shocks, and reduce damage to mechanical components [
19,
21,
22]. However, the implementation of SEAs at robotic joints demands larger actuator setup with higher gear ratios [
23], which reduces the robot’s ability to perform high-speed, agile movements. To address these issues, Parallel Elastic Actuators (PEAs) [
24,
25] and Variable Stiffness Actuators (VSAs) [
26,
27] have been introduced. These actuators also reduce motor torque demands and improve performance, precision, and energy efficiency [
20]. However, they often sacrifice control bandwidth and introduce mechanical complexity, especially for a compact leg design. The addition of components to modulate stiffness introduces nonlinearities to the system that then complicate control strategies as well [
28].
Recent advancements in brushless direct-current (BLDC) motors have enabled the development of quasi-direct-drive actuators, which combine high-torque-density BLDC motors with low-reduction-ratio transmissions. These systems enable accurate force control via motor current with high transparency [
29,
30]. MIT Cheetah [
31] and SpaceBok [
32] are two popular robots equipped with high-torque-density motor actuators with large gap radii. However, for biped robots requiring multiple degrees of freedom and dynamic performance, such large motors are impractical [
29]. Other proposed solutions, such as continuously variable transmissions and infinitely variable transmissions [
33,
34], offer promising capabilities; however, they introduce considerable mechanical complexity, making them difficult to integrate into compact actuators, and often result in increased system weight and component count [
29]. Nonetheless, the optimal selection of the gear reduction ratio enables the achievement of highly instantaneous joint power across a wide range of movements without significantly increasing the actuator’s size, weight, or mechanical impedance of the system [
29].
In our previous work [
8], we proposed a unified optimization framework for the optimal design of actuators for an anthropomorphic robotic leg that operates only in the sagittal plane. The framework focused on the optimal selection of electric motors and transmission mechanisms to enable energy-efficient, precisely controllable, and agile bipedal locomotion. Next, we extended this framework to account for motion in all three planes and used it in the design and development of our new humanoid platform named Mithra [
35]. Mithra was specifically developed with the goal of matching an average human in overall size, mobility, kinematics, kinetics, and actuation performance. While the previous paper focused on the optimization framework and matching anthropomorphic traits, in this paper, we present the details of Mithra’s leg actuators’ design and development. In particular, we present the results of both theoretical and experimental evaluations to assess the actuators’ functionality and overall joint performance, including comparisons with the leg designs of other bipedal robots, wherever applicable.
This paper is organized as follows:
Section 2 outlines the high-level design considerations of the humanoid robot Mithra.
Section 3 presents a comprehensive description of each leg actuator design, along with the relevant engineering analyses.
Section 4 discusses the results obtained from both experimental and theoretical evaluations on the developed joint actuators and compare with other legged robots. Finally,
Section 5 concludes this paper with a summary and future research directions.
3. Six-DoF Anthropomorphic Legs of Mithra
With the objective of achieving human-like motion and dynamics in walking and running locomotion patterns, Mithra was designed with high-performance and powerful joints. While Mithra has been developed with the capability of conducting various human tasks, its most demanding case is characterized by running at 3 m/s. Thus, each joint was designed and developed to provide sufficient torque and rotational speed for running at this speed. To ensure a robust yet lightweight mechanical design, engineering analyses such as finite element and fatigue analyses were conducted, with a minimum factor of safety of 2 considered for all mechanical components. Based on the outcomes of these analyses, the structural components of Mithra were refined and finalized to enhance its mechanical performance while aligning with anthropomorphic kinematic and kinetic attributes.
3.1. Desired Joint Kinematics and Kinetics
To identify the required range of motion and joint moments for each leg joint, averaged and normalized normative human trajectory data were utilized from [
45,
46]. The mass normalized joint moment data were then denormalized based on the target mass of Mithra (75 Kg). Additionally, transmission efficiency was factored in, along with the direction of power flow, to ensure robust performance and a long operational life for the robot.
To support the structural design while ensuring safety and lightweight characteristics, a quasi-static force analysis was performed in the design of each structural component. This analysis used ground reaction forces and joint moments during running at 3 m/s to compute the peak forces and moments applied to each leg structural component. These forces were used in the finite element analysis (FEA) of the respective structural components.
3.2. Hip Actuator Design and Analysis
The 3D CAD model of Mithra’s hip joints is shown in
Figure 4. Each actuator assembly consists of a brushless direct-current (BLDC) motor paired with a compound planetary gearbox. In the exploded view of the abduction/adduction hip actuator, one end of the motor’s rotor is connected to an incremental encoder, while the other end is coupled to the sun gear of the gearbox. The gearbox contains three planetary gear sets, each comprising a sun–planet gear and a ring–planet gear. The gear wheels for each part of these gearboxes were selected using the optimization framework detailed in [
8,
35]), ensuring that they withstand the worst-case loading conditions. This was accomplished through constraining the nominal tangential load on the pitch circle of each gear to be below the allowable tangential load calculated using the AGMA bending stress equation [
47]. Considering the uncertain nature of impact loads in dynamic robotic locomotion and the critical importance of maintaining a lightweight design, a factor of safety (FoS) of 2 was applied to all gear wheels during the optimization process. All three hip gearboxes utilize a transmission ratio of 15:1. The gear wheels were purchased off-the-shelf to minimize manufacturing time and cost. However, modifications were made to reduce the weight and moment of inertia of the gears, maintaining the minimum FoS at 2. The cylindrical shaft, which is connected to the planetary carrier, serves as the joint’s output shaft and is supported by a roller bearing embedded in a bearing holder (
Figure 4).
In Mithra’s hip joint model, the kinematic chain of the robotic leg begins with the actuator designated for internal and external rotation. This actuator includes connection plates that ensure a solid and secure interface with the robot torso, as shown in
Figure 4. At the actuator output, a combined radial and thrust bearing was used to accommodate multidirectional loads, particularly high axial loads in the
z-direction encountered during both the stance and swing phases. This bearing also enables smooth, low-friction rotation around the vertical axis, which is essential for the accurate and rapid turning of the entire leg during locomotion. The actuator’s output shaft is connected to the hip internal/external rotation joint mount, which is a U-shaped frame that supports the remainder of the leg assembly. This mount is an assembled structure composed of three components and serves as one of critical components of Mithra’s leg. It is subjected to the highest forces in all directions during the stance phase and supports the entire weight of the leg (excluding the internal/external rotation actuator). It is also subjected to the significant inertial forces during leg swing. The actuator for hip abduction and adduction is mounted directly onto this joint mount. Two hip abduction and adduction joint mounts, connected via cylindrical shafts that rotate within radial bearings, are used to attach the hip flexion/extension actuator to this U-shaped frame, as illustrated in
Figure 4. The output of the flexion/extension actuator is linked to the hip flexion/extension joint mount frame, which connects the rest of Mithra’s leg. Each actuator in Mithra is equipped with both a high-resolution incremental encoder for motor angular position and an absolute encoder for direct joint position measurement. This absolute encoders facilitate accurate joint position identification during system startup while the incremental encoders can provide high-resolution control on the motor side.
After careful evaluation of material options for Mithra’s mechanical structure, aluminum 7075-T6 was selected due to its optimal combination of yield strength, modulus of elasticity, density, and cost. To prevent excessive weight in the leg structure, all structural components were analyzed and optimized through extensive FEA. All leg structural components were designed to ensure structural integrity, resistance to deformation, and protection against buckling under the maximum forces expected during dynamic locomotion. While all structural components of Mithra underwent FEA, this paper focuses on the most critical structures in the hip actuation system: the hip abduction/adduction joint mount, the mount and assembled mounting frame for hip flexion/extension joint, and the back mount and assembled mounting frame for hip internal/external rotation joint. These components and assemblies were identified as critical because they endure the highest loads during the worst-case scenario, which is running at 3m/s, and any failure or lack of rigidity in these parts would significantly impair the function of the entire leg mechanism.
For the FEA of these mechanical components and assemblies, quasi-static structural analysis was performed under the loads corresponding to the maximum forces and torques obtained from the force analysis. To ensure the reliability and accuracy of the results, a mesh convergence study was conducted. The mesh was refined incrementally until changes in maximum stress and displacement were less than 0.1 percent, confirming that the solution was not further sensitive to mesh density and independent of mesh refinement. All final design versions of the structural components were validated to meet the minimum FoS of 2 under the highest loading conditions, while also aiming to minimize weight and maintain better appearance and functional leg design.
Figure 5 presents the FEA results of the final versions of the selected components, following an iterative design process aimed at removing as much material as possible to produce lightweight parts with improved aesthetics and structural integrity. As shown in
Figure 5a,b, the hip abduction/adduction joint mount and the hip flexion/extension joint mount were designed to achieve a minimum FoS of 2 when fabricated with aluminum 7075-T6. In contrast, the hip internal/external rotation back mount (see
Figure 5c) demonstrated a significantly higher minimum FoS, approximately 4. This was due to design constraints associated with embedding a radial bearing within the component, which required increased wall thickness to accommodate the press fit of bearing. To reflect real-world conditions more accurately, components were analyzed both individually and within their respective assemblies. For the assembly-level FEA, fastener and bearing connections were defined to capture more realistic contact interactions, and additional boundary conditions and load distributions were considered. This approach allows for a more accurate representation of real-world effects, including the combined influence of multiple loads and the presence of contact stresses between mating parts.
Figure 5d,e show the results of the analysis for the assembled components. In both cases, the minimum factor of safety remained close to 2, confirming that Mithra’s hip structure is capable of withstanding impact loads and high stress conditions encountered during running at 3 m/s.
3.3. Knee Actuator Design and Analysis
The parallelogram four-bar linkage configuration of Mithra’s knee actuation system enables the gearbox output torque to be transmitted to the knee joint with a 1:1 transmission ratio. The knee actuator shares the same motor and gearbox configuration as the actuators used for the hip abduction and flexion, with one important difference: the knee motor, an Allied Motion MF0127020 BLDC motor, features a customized winding to increase the torque constant
from the default 0.16 Nm/A to 0.26 Nm/A. As a result, the actuator design was based on a similar concept. The 3D CAD model of Mithra’s knee actuator is shown in
Figure 6. Because the gearbox output in the knee joint connects directly to the parallelogram linkage, the planetary carrier was redesigned to attach the knee input link instead of using the planetary carrier and the joint output shaft found in the hip actuators. To accommodate the larger diameter but relatively thin profile of the planetary carrier disk, and to ensure high load tolerance with smooth rotation, needle-roller bearings were used between the carrier disk and its holder.
To preserve the desired thigh length, two knee side brackets (top and bottom) were designed as shown in
Figure 6. The axis of rotation for the knee joint is defined by the connection axis between the bottom knee bracket and the ankle side bracket. Mechanical hard stops were integrated between the left and right knee bottom brackets and the ankle bracket to prevent hyperextension of the knee joint during motion (
Figure 6). These stops also help to avoid singular configurations in the linkage, where the input and transmission links become colinear, potentially causing control instability and a loss of mechanical advantage. At the contact surfaces of the hard stops, polymer strips made from D3O, an impact-absorbing material, were used to mitigate impact forces, reduce post-impact vibration, and protect structural components from damage under high-shock conditions.
The knee joint gearbox utilizes a custom-designed ring gear, as it is required to deliver the highest torque among all joints in Mithra’s leg. Based on the AGMA bending stress equation [
47], the ring gear was designed with a width of 25 mm, which is significantly wider than the 15 mm off-the-shelf ring gears used in the hip gearboxes, to withstand the elevated stresses and forces acting on the gear teeth. Due to these high loads, the ring gear was assembled onto its holder using heavy-duty set screws, rather than the press-fit method employed in the hip gearboxes. The complete knee actuation assembly was designed to be mounted to the base plate of the hip flexion/extension mounting frame.
As with the hip actuation setup, aluminum 7075-T6 was selected for constructing all mechanical structures in Mithra’s knee actuation system, except for the knee transmission link rod, which was fabricated using carbon fiber. All mechanical components were analyzed and optimized through extensive FEA, following the same methodology described earlier for the hip assembly. This process ensured structural integrity, resistance to deformation, and prevention of buckling under the maximum forces expected during dynamic locomotion. Although every mechanical component of the knee setup was subjected to FEA, here, we only present the simulation results for the most critical structures: knee side brackets, knee planetary carrier, knee input link, knee connecting column, and knee transmission link assembly.
Figure 7 shows the FEA results of the final design version of these structural components after an iterative weight reduction process aimed at producing lightweight parts with better appearance.
Based on the quasi-static force analysis, approximately half of the maximum forces acting on the knee joint are distributed to each of the side brackets, which include the top and bottom brackets that support the thigh structure. Under these loading conditions, FEA results showed that all final design versions of knee side brackets achieved a minimum factor of safety of 2, as illustrated in
Figure 7a,b, confirming their suitability for the worst-case loading condition during running. Further, our analyses showed that the knee planetary carrier achieved a minimum factor of safety of 2.3 under maximum actuator torque output, as shown in
Figure 7c. The knee input link, the transmission link assembly, and the connecting column are critical components of the knee linkage system. These components were designed with precise dimensions to maintain proper clearance for link movement near the gearbox output and internal joints. This ensured a feasible and collision-free linkage configuration that could achieve the full knee joint range of motion from
to
. Under the maximum loading conditions, all three components exhibited a minimum FoS greater than 2, as presented in
Figure 7d–f, with small deflections.
3.4. Ankle Actuation Design and Analysis
3.4.1. Ankle Actuation Mechanism Design
Based on the optimization results presented in [
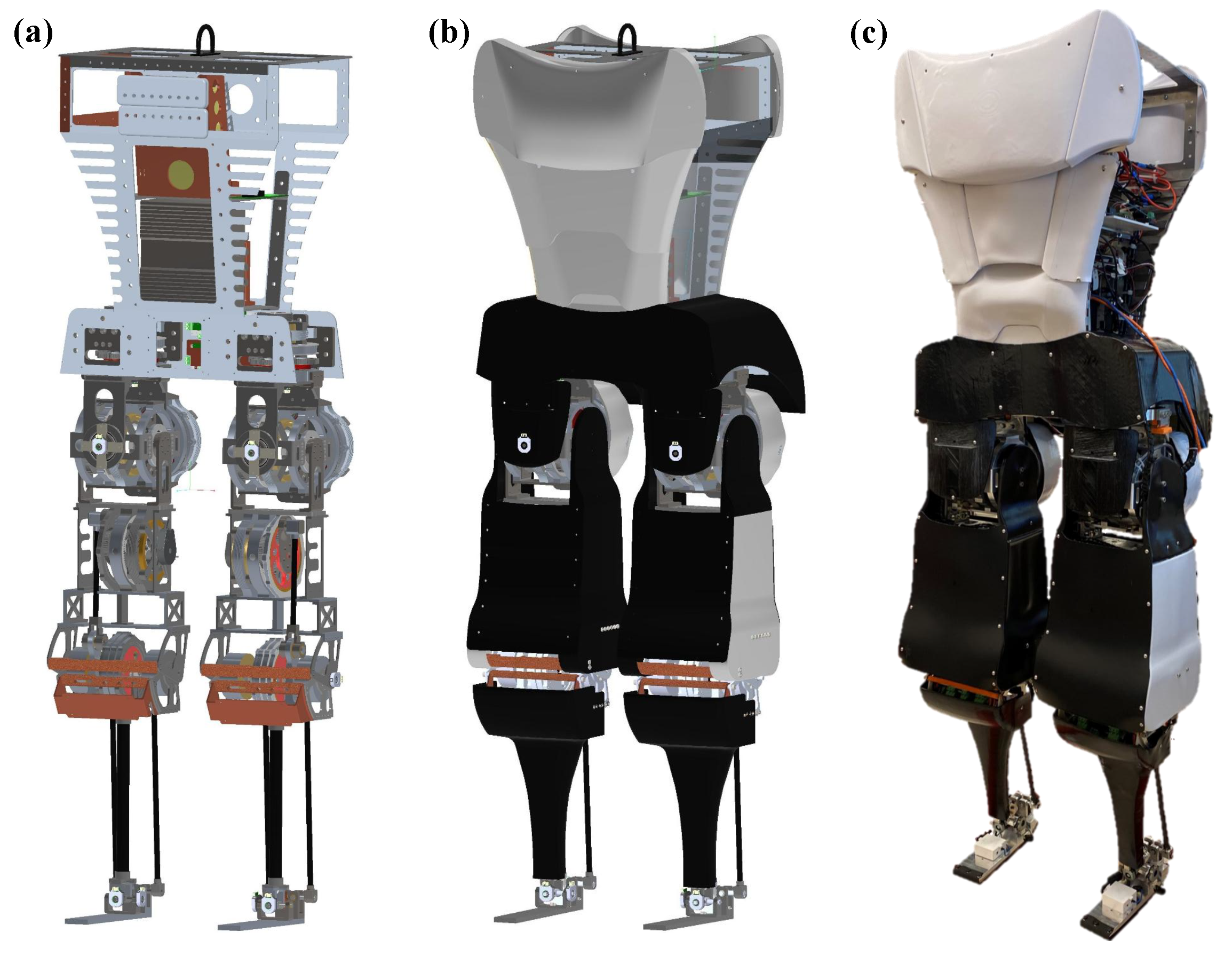
35], the ankle joint actuation setup was designed using a parallel four-bar linkage mechanism with coupled actuation driven by two geared brushless DC (BLDC) motors, each equipped with a single-stage planetary gearbox (
Figure 2b,c).
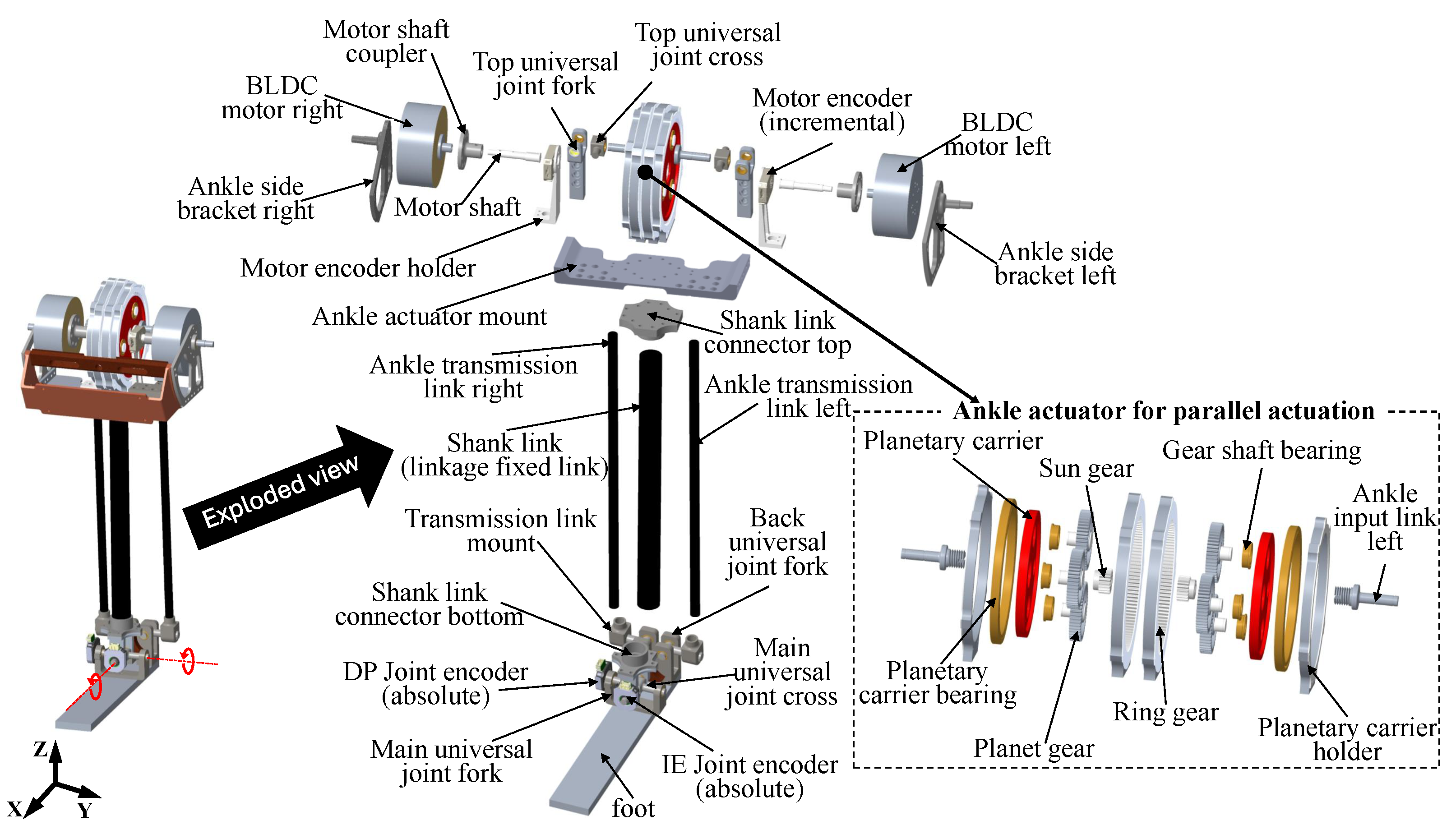
Figure 8 illustrates the design of the ankle actuation system for Mithra.
Each gearbox output connects to the foot through a transmission link and two universal joints, i.e., top and back (see
Figure 8), enabling the ankle joint to achieve two degrees of freedom (2-DoF) motion at the main universal joint located on the foot. The dorsi/plantarflexion motions are achieved by rotating both planetary carriers of the ankle gearboxes in the same direction at the same speed. In contrast, inversion/eversion motions are realized by driving the planetary carriers in opposite directions. With this coupled actuation scheme, the ankle joint can deliver twice the torque of a single actuation setup (comprising a motor, gearbox, and single 4-bar linkage) while retaining its output speed. In other words, this configuration allows the ankle to perform high-torque operations at high joint speeds. The ankle actuator differs from the hip and knee actuators, since it employs an outrunner-type BLDC motor paired with a single-stage planetary gearbox. As shown in
Figure 8, the ankle motor is mounted on the ankle side bracket, and its motor shaft is attached via a shaft coupler. The shaft passes through a high-resolution incremental encoder for motor position and velocity measurements, and a sun gear is mounted at the end of the shaft.
The exploded view of the ankle actuator in
Figure 8 shows the gearbox assembly, which uses a planetary carrier similar in style to the knee gearbox. However, in this case, the ankle input link shaft, which serves as the gearbox output, is mounted at a radial offset from the center of the planetary carrier disk. To ensure smooth and reliable operation under load, a universal joint (the top universal joint) is used at the distal end of the ankle input link shaft. The ankle actuator mount is a rigid component that secures the actuator and encoders, and serves as the structural connection between the shank and the knee joint. The shank connects to the foot through the main universal joint, while the transmission link connects to the foot through the back universal joint, as shown in
Figure 8. The ankle’s four-bar parallel linkage mechanism is illustrated in 2D in
Figure 9a, along with the optimal link lengths derived from our actuator optimization process.
Integrating parallel mechanisms into the leg posed several design challenges, particularly in maintaining a desired joint range of motion comparable to those of a human’s while achieving compactness. The ankle, having two degrees of freedom, required the inclusion of two gearboxes and motors within a compact space at the knee joint. This led to a wider knee joint in Mithra’s leg. Despite this, the ankle actuators are positioned higher on Mithra’s leg than in most existing robots, so it reduces the distal mass for enhanced leg dynamic movements. In contrast, robots such as ASIMO [
4] and COMAN [
48] position their ankle actuators below the knee joint. Although the positional difference is only a few centimeters, the associated reduction in distal mass significantly influences the dynamic behavior of the leg.
3.4.2. Kinematic Analysis of the Ankle Actuation Mechanism
The parallel four-bar linkage mechanism of the ankle actuation requires a closed-form inverse kinematics solution for several reasons, including accurate ankle control, force analysis for structural component design, and determining motor positions at robot startup using feedback from joint encoders. In the inverse kinematics calculation of the ankle, two distinct kinematic chains were defined between the two universal joints located at the end of the shank and the ankle input link. One chain passes through the shank link (highlighted in blue in
Figure 9b), while the other passes through the ankle transmission link (highlighted in red). These two kinematic chains are further illustrated on a simplified 3D schematic shown in
Figure 9c.
The blue kinematic chain begins at the main universal joint located at the end of the shank. From this point, the transformation proceeds as follows: a translation along the
z-axis by a distance of
to the center of the ankle gearbox, followed by a rotation about the gearbox output axis by an angle
representing the geared motor angle; next, a translation along the x-axis from the center of the gearbox to the rotational axis indexed by
; and finally, a translation along the y-axis to reach the universal joint at the end of the ankle input link. The final homogeneous transformation matrix [
49] for this kinematic chain is given by
Likewise, the final homogeneous transformation matrix for the red kinematic chain can be obtained by considering rotations at ankle joint (i.e.,
,
), rotations at linkage joints (i.e.,
,
,
,
), and translations in all
x,
y, and
z directions:
where
,
,
,
, , ,
.
Since
and
are fixed link lengths in the linkage mechanism, the total distance from the top universal joint (at the ankle input link) to the back universal joint (at the heel) can be computed using the Pythagorean theorem, as follows:
where
and
are the position vectors of the center of top and back universal joints, respectively, relative to the ankle joint (
Figure 9d). Note that
can be obtained from
. A new homogeneous transformation matrix,
, which is constructed from the matrix product
, can be used for computing
. After expanding Equation (
3) and simplifying, the following relation can be derived:
where
a and
b depend only on the (fixed) linkage lengths and the ankle angles, and not on
. Solving Equation (
4) we obtain
where plus and minus correspond to the left and right kinematic chains, respectively, in the coupled actuation of parallel linkage mechanism. Using the previously derived relationship for the ankle gearbox output position,
, the corresponding output velocity,
, and acceleration,
, can be obtained by considering the first (Jacobian) and second time derivatives of
, respectively. Through further analysis of the kinematic chains, the additional joint angles
,
,
, and
can also be determined. These intermediate angles are essential for estimating quasi-static forces acting on the linkage components during both walking and running, which are to be used in the engineering analysis of structural components.
3.4.3. Structural Analysis
As with the hip and knee actuation setups, aluminum 7075-T6 was selected for the construction of all major structural components in the ankle actuation system, except for the shank link rod and transmission link rods, which were designed using carbon fiber tubes. Additionally, stainless steel 410 was chosen for the planetary gearbox output shaft due to its higher strength and wear resistance requirements. All structural components were designed to be lightweight while ensuring structural integrity, resistance to deformation, and the prevention of buckling under the maximum forces anticipated during dynamic activities. All designed components of Mithra’s ankle actuation system were further analyzed and optimized using extensive FEA, following the same methodology applied to the hip and knee actuation setups.
Figure 10 presents the FEA results of the final design version of the most critical structures, including the ankle side bracket, ankle actuator mount, ankle planetary carrier assembly with output shaft, transmission link assembly, shank link assembly, main universal joint fork, and main universal joint cross.
The FEA on the ankle side brackets was conducted by applying fixtures at the array of clearance holes that is used to fasten the bracket to the ankle actuator mount and applying the calculated forces to the extruded shaft in all three directions.
Figure 10a shows the outcomes of this analysis. The results indicate that the final design version of the bracket has a minimum FoS greater than 2, confirming its structural integrity under the maximum loading conditions. The ankle actuator mount is another critical component, as it houses both ankle geared motors. It experiences high stress during foot–ground impacts due to its direct connection to the shank. Further, during the swing phase, the knee actuator force is applied to and transmitted through this mount. The FEA results for the final design version of this component in
Figure 10b shows a minimum FoS of 2 at the worst-case conditions, validating its readiness for integration into Mithra. For the ankle planetary carrier, the FEA was performed similar to the analysis conducted for the knee planetary carrier. Considering that the output shaft is fabricated from stainless steel 410 and is positioned near the boundary of the carrier disk, the analysis was conducted on the assembly of the planetary carrier and the ankle input link. As shown in
Figure 10c, the final design version demonstrated a minimum FoS of 2.1, which is sufficient for safe operation under maximum load.
Figure 10d presents the FEA results for the ankle transmission link assembly under the maximum loading conditions. The final design achieved a minimum FoS of 2.3. Given the importance of link length to joint position and power transmission, deflection analysis was also performed. The link was found to deflect only 0.0018 mm at maximum load, which is negligible and does not compromise actuator performance. A higher safety factor was required for components closer to the foot due to the increased impacts experienced at the distal end of the leg. To address this, a minimum FoS of 2.5 was targeted for all foot-level structural components.
Figure 10e–g present the FEA results for the final design versions of the shank assembly, main universal joint cross, and the joint fork located below the knee, respectively. All components met or exceeded the FoS threshold of 2.5, ensuring structural integrity, resistance to deformation, and protection against buckling under the maximum dynamic loads. During both piecewise and assembly-level FEA, we aimed to replicate real-world conditions as accurately as possible. For example, in the case of the main universal joint, fixtures were defined to simulate proper support at the roller bearing connections, along with directional fixtures to represent the placement of snap rings that fix the component both radially and axially.
3.5. Fatigue Analysis
All the structural components of Mithra have been optimized with respect to weight, size, and structural integrity to enhance both overall performance and appearance. However, to ensure long-term reliability and durability, fatigue analysis had also been performed on critical components that are subjected to repetitive loading. The critical components for fatigue analysis include those that regularly experience high stress under cyclic loading, parts with complex geometries that are more expensive and time-consuming to manufacture, and components that are difficult to replace, especially if replacement involves disassembling press-fit connections or undertaking labor-intensive procedures. Given that walking is the most common locomotion pattern in humans [
50] and align with our study of human-inspired robotic locomotion, fatigue analysis was conducted based on the forces derived from quasi-static analysis scaled to Mithra’s total weight. The analysis considered data from fast walking at a speed of 2.0 m/s, which was chosen as the worst-case scenario for fatigue loading due to the relatively high force repetition involved in this locomotion mode.
Although the S–N curve for Al7075-T6 is available in the published literature (e.g., [
51,
52]), directly applying these experimentally derived values to custom structural designs is often unrealistic. This is primarily due to variations in factors such as surface finish, loading type, stress concentrations, and operating temperature, all of which significantly influence fatigue performance in real-world applications. To address these discrepancies, a method for adjusting the endurance limit by incorporating six modifying factors has been proposed [
53]: surface condition,
; size,
; loading type,
; temperature,
; reliability factor,
; and miscellaneous items,
. These factors are used to find the material’s endurance limit more accurately to reflect the realistic conditions of the customized structural components during operation. The adjusted endurance limit calculation using Marin’s equation is formulated as
Based on the guidelines provided in [
54], Mithra’s structural components were assumed to be polished, machined parts. Therefore, the surface condition factor was chosen as
= 0.9. Since the average sizes of components operate at room temperature, the size and temperature factors were both set to
=1 and
= 1, respectively. The loading factor was assigned as
= 0.85, reflecting the axial nature of the loading condition. For the reliability factor,
= 0.868 was selected, corresponding to a 95% reliability level, as discussed in [
54]. This selection considers the high-performance nature of the robotic applications and the expectation that structural components should endure for the full operational lifespan of the robot with no planned replacements. Since no additional effects such as case hardening or residual stresses were considered, the miscellaneous factor was set to
= 1. After incorporating all these factors, an adjusted endurance limit for Al7075-T6 was found with the consideration of maximum fatigue strength found in the literature [
51,
52].
From the published data for the S–N curve of Al7075-T6 [
51,
52], it is observed that the high-cycle fatigue domain extends from
to
cycles, with the maximum fatigue strength reaching approximately 150 MPa. To construct an adjusted S–N curve suitable for our customized structural components, we considered the ultimate tensile strength of the material as the reference point at the onset of the high-cycle fatigue domain (
cycles) and adjusted endurance limit at the
cycles. The adjusted S–N curve for Al7075-T6, used in our fatigue analysis, is presented in
Figure 11. This curve was derived using the following empirical equation provided in [
54]:
where
is the adjusted stress amplitude,
is the ultimate tensile strength of the material,
is the fatigue exponent determined using the endurance strength and its corresponding number of cycles, and
N is number of cycles to failure. Using the adjusted S–N curve for Al7075-T6, fatigue analysis was performed on critical structural components of Mithra based on the quasi-static force data derived for a fast walking gait. Among those critical components, the results of the fatigue analysis for the hip internal/external rotation joint back mount, knee input link, ankle side bracket, ankle planetary carrier assembly, and main universal joint cross are presented in
Figure 12.
Assuming that a fast-walking scenario with each trial lasts for about 20 min and an average gait cycle duration of approximately 0.8 s, the robot completes around 1500 gait cycles per trial. Over a planned operational lifespan of 5000 trials, the total number of the cycles amounts to approximately 7,500,000. Based on fatigue analysis of critical structural components, the minimum fatigue life is observed at the knee input link, with a simulated total cycles of 11,000,000 for fast-walking conditions. Therefore, it is theoretically evident that Mithra can undergo more than 5000 sessions of 20-minute fast-walking tests without experiencing structural failure or any maintenance requirement due to fatigue.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}