
Multi-Metric Fusion Hypergraph Neural Network for Rotating Machinery Fault Diagnosis


Abstract
1. Introduction
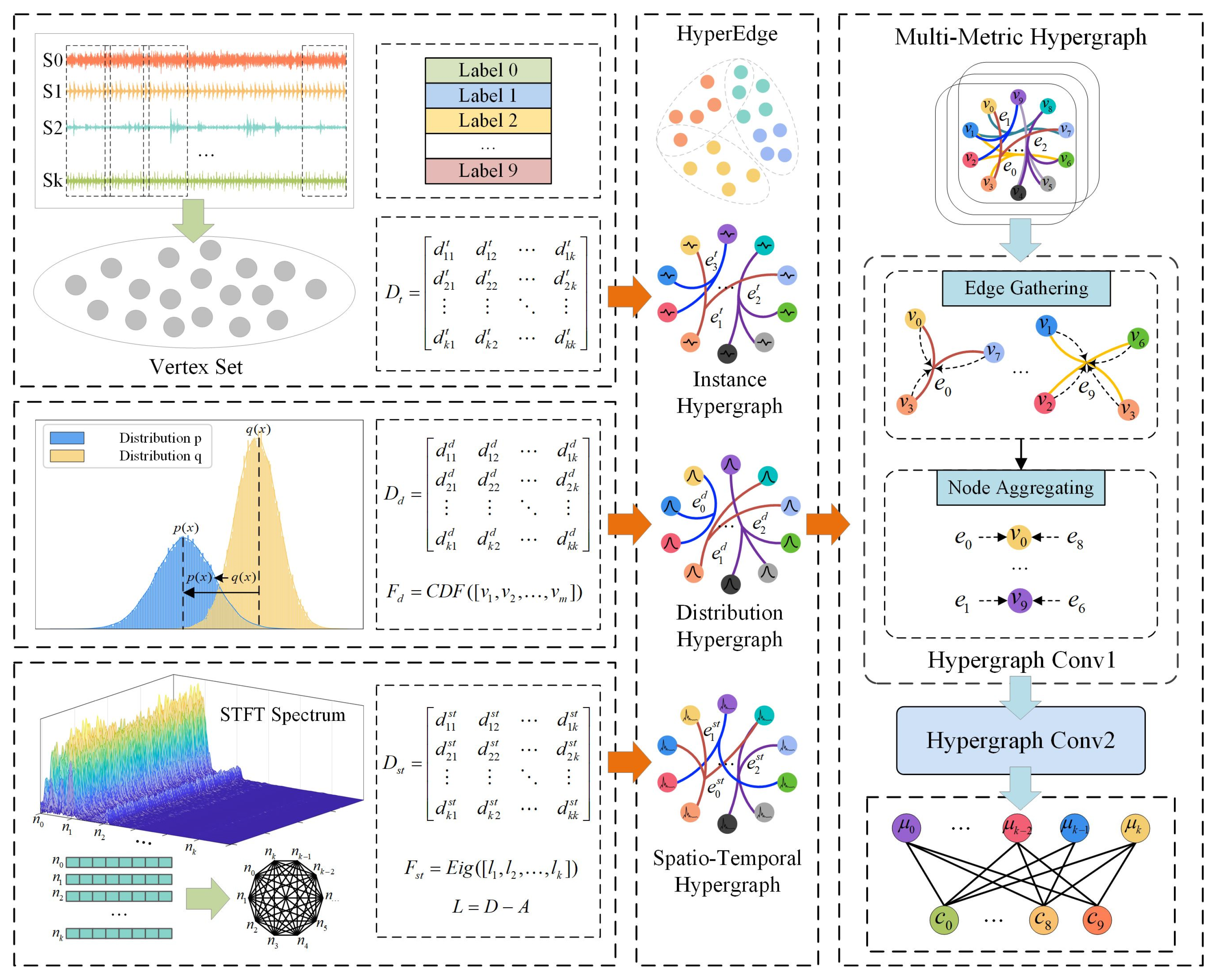
- A method for constructing multi-metric fused hypergraphs based on various similarity metrics is proposed. This involves creating a multi-metric weighted hypergraph by integrating instance hypergraphs, distribution hypergraphs, and spatiotemporal hypergraphs, which comprehensively describe the relational features among samples.
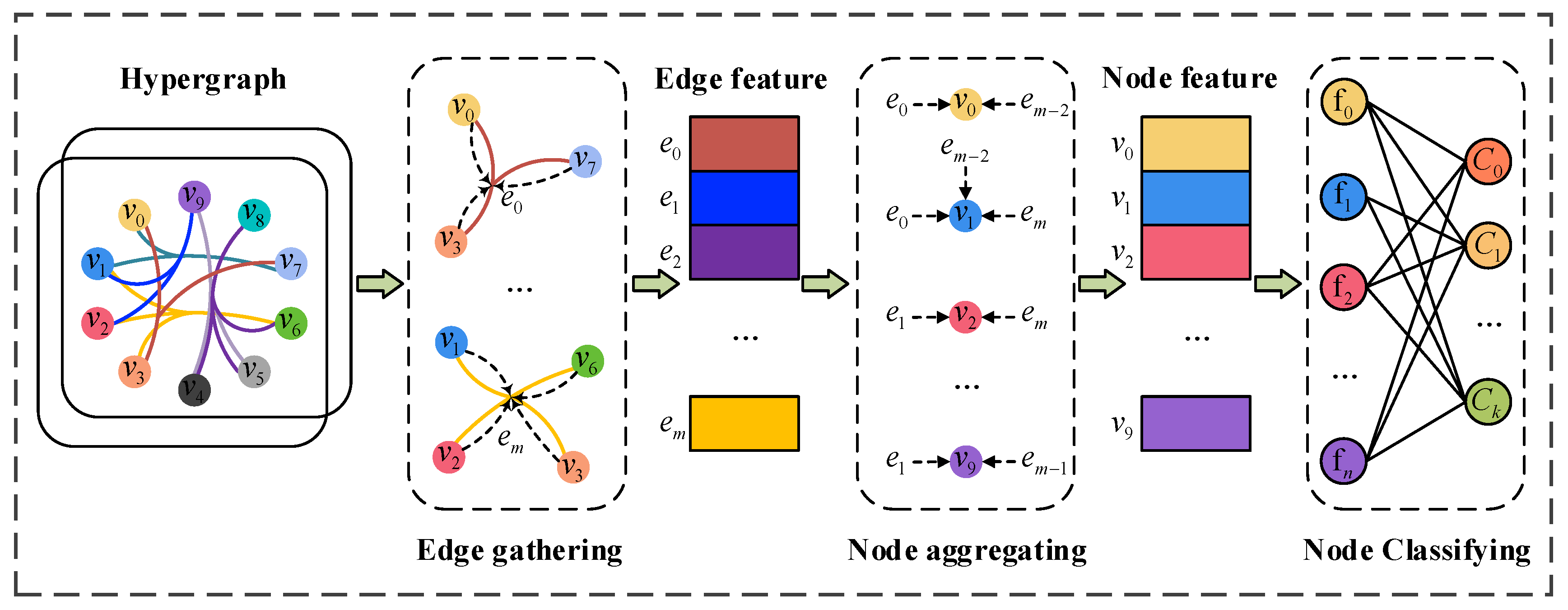
- A Multi-Metric Fusion Hypergraph Neural Network (MMF-HGNN) is developed by utilizing a dual-layer hypergraph convolutional network within a hypergraph neural network framework, thereby enhancing the accuracy of fault diagnosis in rotating machinery.
- A thorough analysis of crucial factors for the proposed MMF-HGNN method is conducted and its effectiveness is validated on three benchmark datasets. Additionally, the method’s dependency on labeled samples and its robustness to noise are examined to further assess its performance.
2. Related Work
3. The Multi-Metric Hypergraph Neural Network
3.1. Multi-Metric Hypergraph Construction
3.2. Instance Hypergraph Generation
| Algorithm 1: Constructing instance hypergraph from samples |
| Input: , ; Output: ; |
| 1: ; 2: according to Equation (2); 3: using KNN: 4: do 5: ; 6. , ; 7: end for; 8: ; |
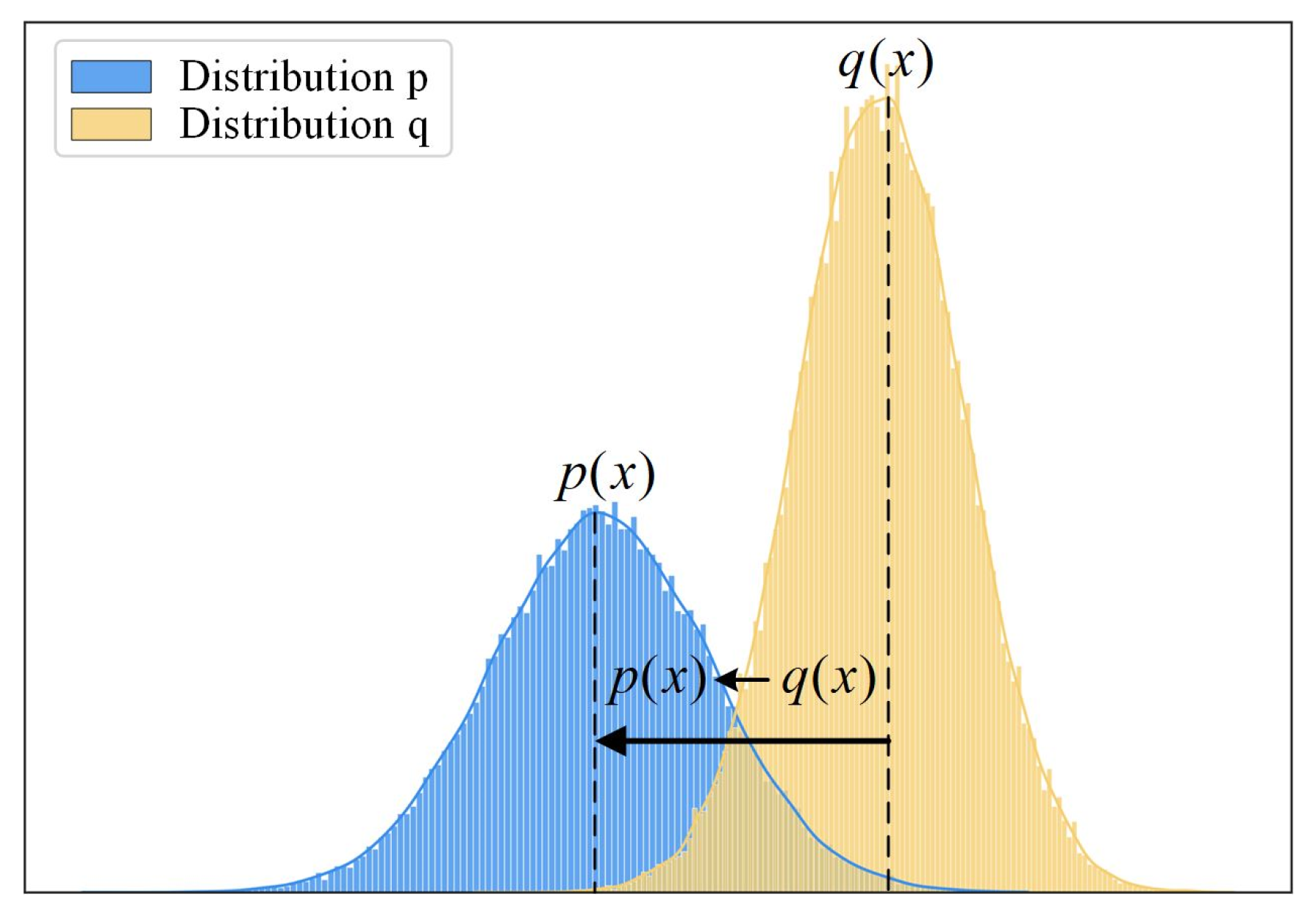
3.3. Distribution Hypergraph Generation
| Algorithm 2: Constructing distribution hypergraph from samples |
| Input: ; Output: ; |
| 1: to histograms; 2: according to Formula (3); 3: using KNN; 4: do 5: ; 6: , ; 7: end for 8: |
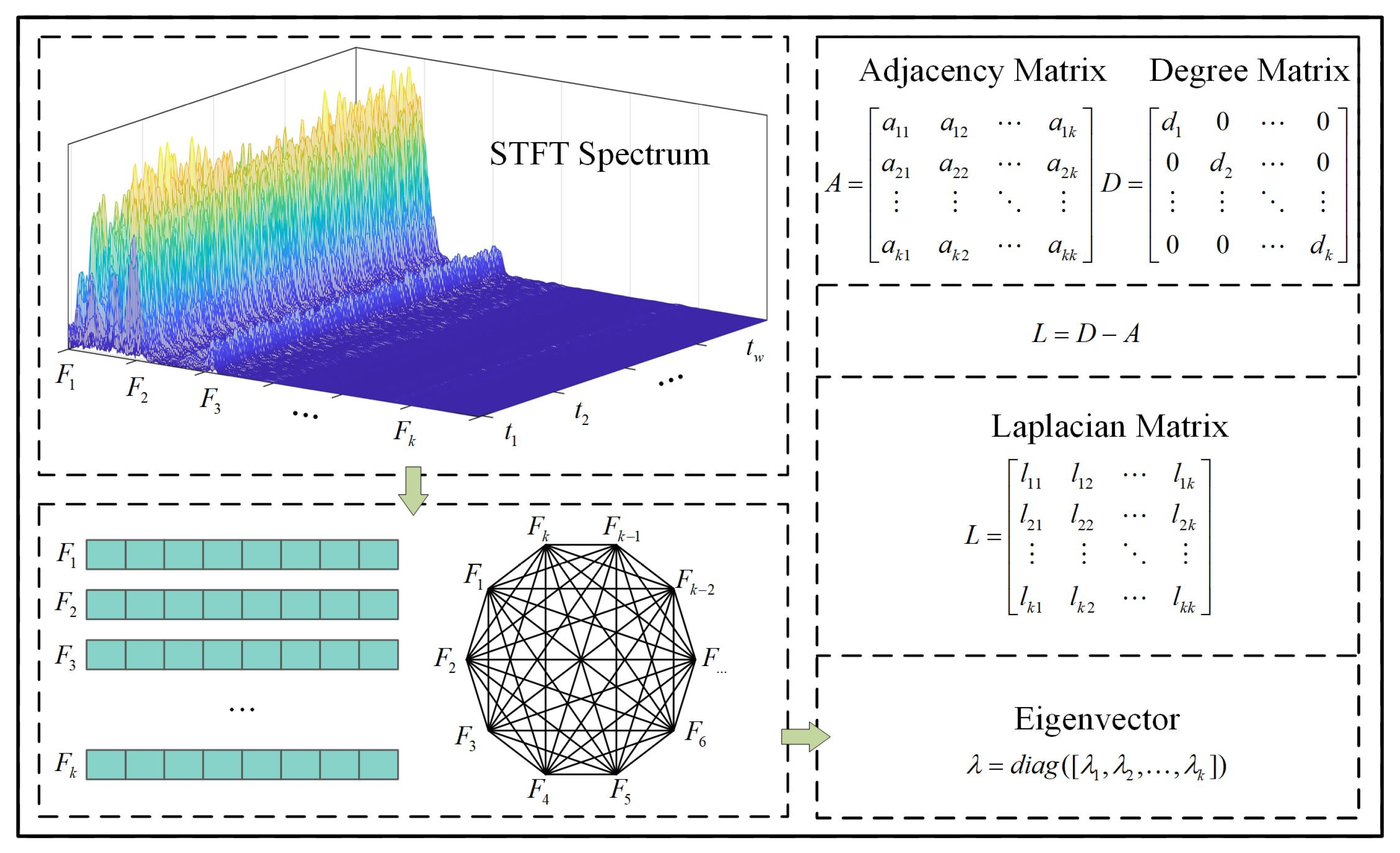
3.4. Spatio-Temporal Hypergraph Generation
| Algorithm 3: Constructing spatio-temporal hypergraph from samples |
| Input: ; Output: ; |
| 1: ; 2: , ; 3: as nodes; 4: according to Formula (3); 5: ; 6: according to Formula (2); 7: using KNN; 8: return ; |
3.5. Multi-Metric Hypergraphs Fusion
4. Experimental Analysis
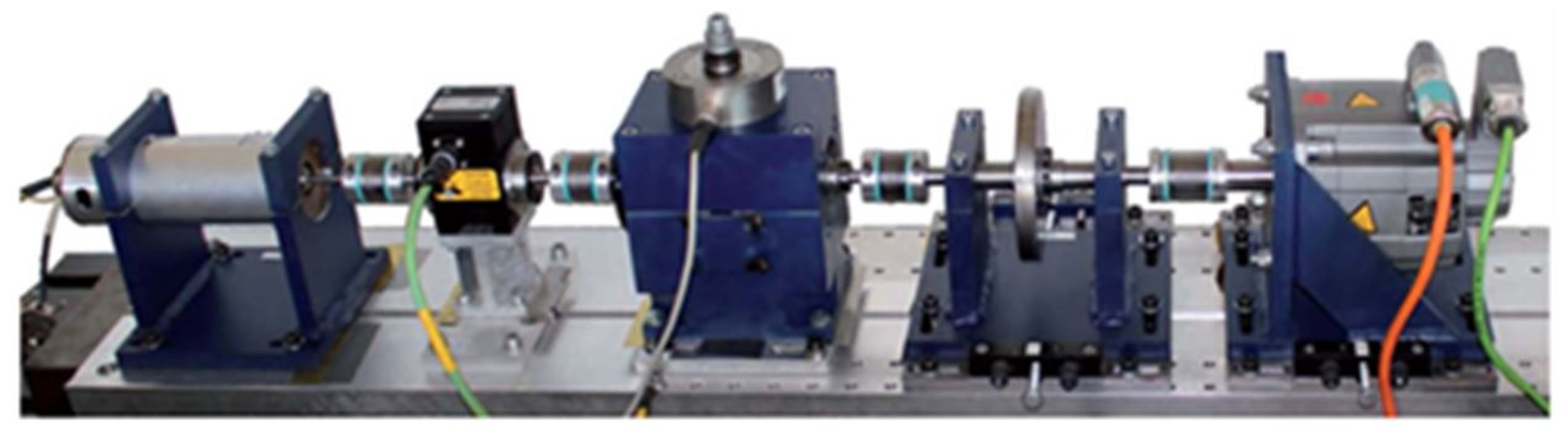
4.1. Dataset Description
4.2. Experimental Settings
4.3. Results and Analysis
5. Experimental Validation
5.1. Case 1: Robustness to Sample Ratio
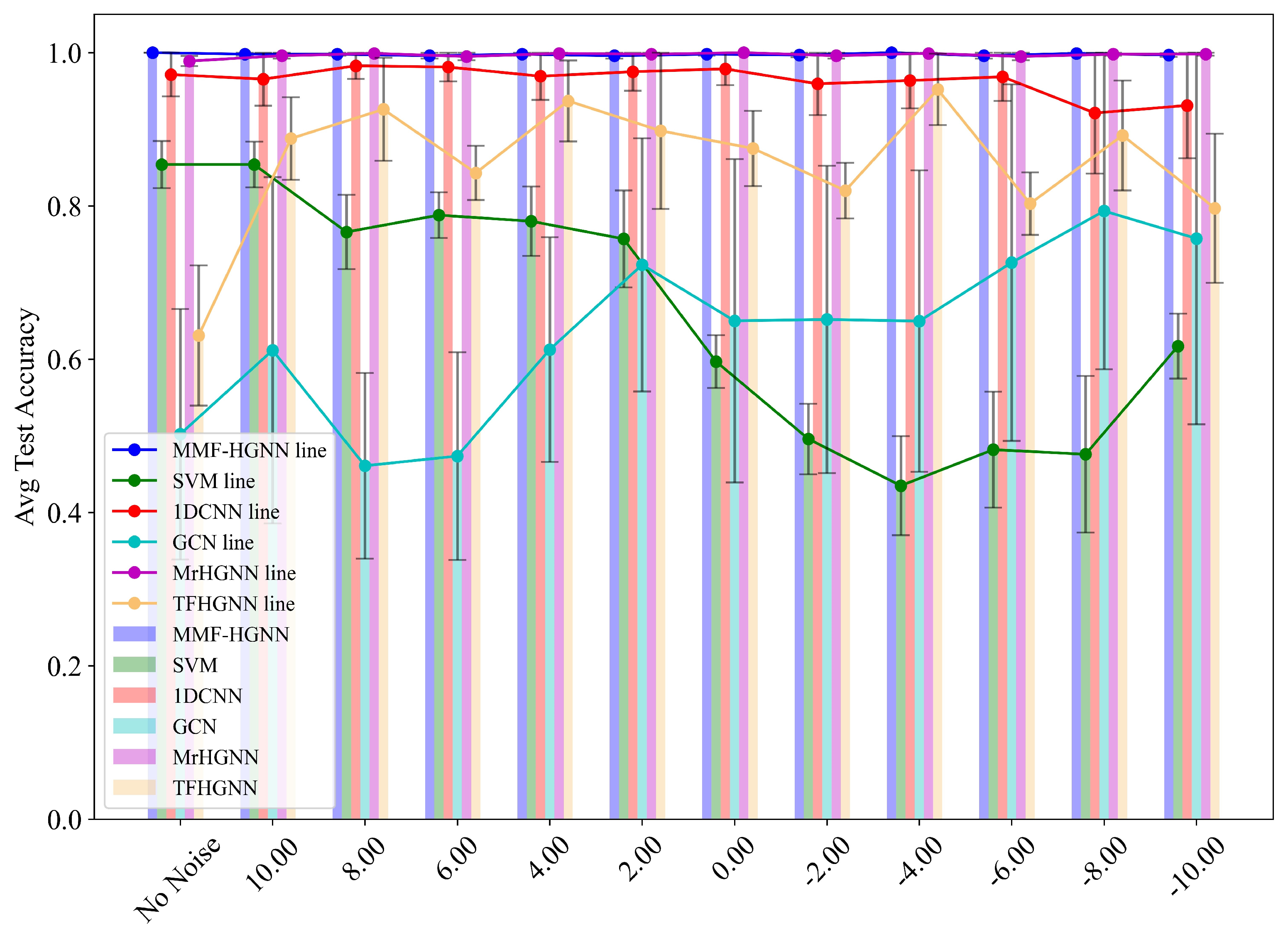
- SVM: Employed 18 common statistical features in the time and frequency domains, which are typically used to assess the state of a device, including average value, standard deviation, root-mean-square, peak value, peak-to-peak value, peak factors, pulse factors, margin factors, waveform factors, skewness, kurtosis, entropy in time domain, and central frequency, average frequency, frequency standard deviation, frequency root-mean-square, frequency variance and signal energy in frequency domain. Training and evaluation provide a baseline for traditional machine learning performance.
- 1DCNN [29]: Used vibration signal samples as input. The network consisted of two convolutional layers (32 and 64 filters, respectively), followed by max-pooling layers, and two fully connected layers (1024 neurons and the number of output classes).
- GCN [30]: Constructed graphs with 12 nodes each, connected by six nearest neighbor (KNN) edges. The network consisted of two graph convolutional layers with 1024 hidden units, followed by batch normalization and fully connected layers with a dropout layer.
- MrHGNN [22]: Resampled vibration signals at different resolutions (1, 0.5, 0.25), and then constructed hypergraphs from the FFT-transformed frequency-domain signals at each resolution. These hypergraphs were concatenated horizontally for input into the two-layer hypergraph convolution network.
- TFHGNN [23]: Integrated both time and frequency domain signals. CNNs were employed to extract features from time and frequency domains separately, and these features were combined using self-attention mechanisms before being input into the two-layer hypergraph convolution network.
5.2. Case 2: Robustness to Random Noise
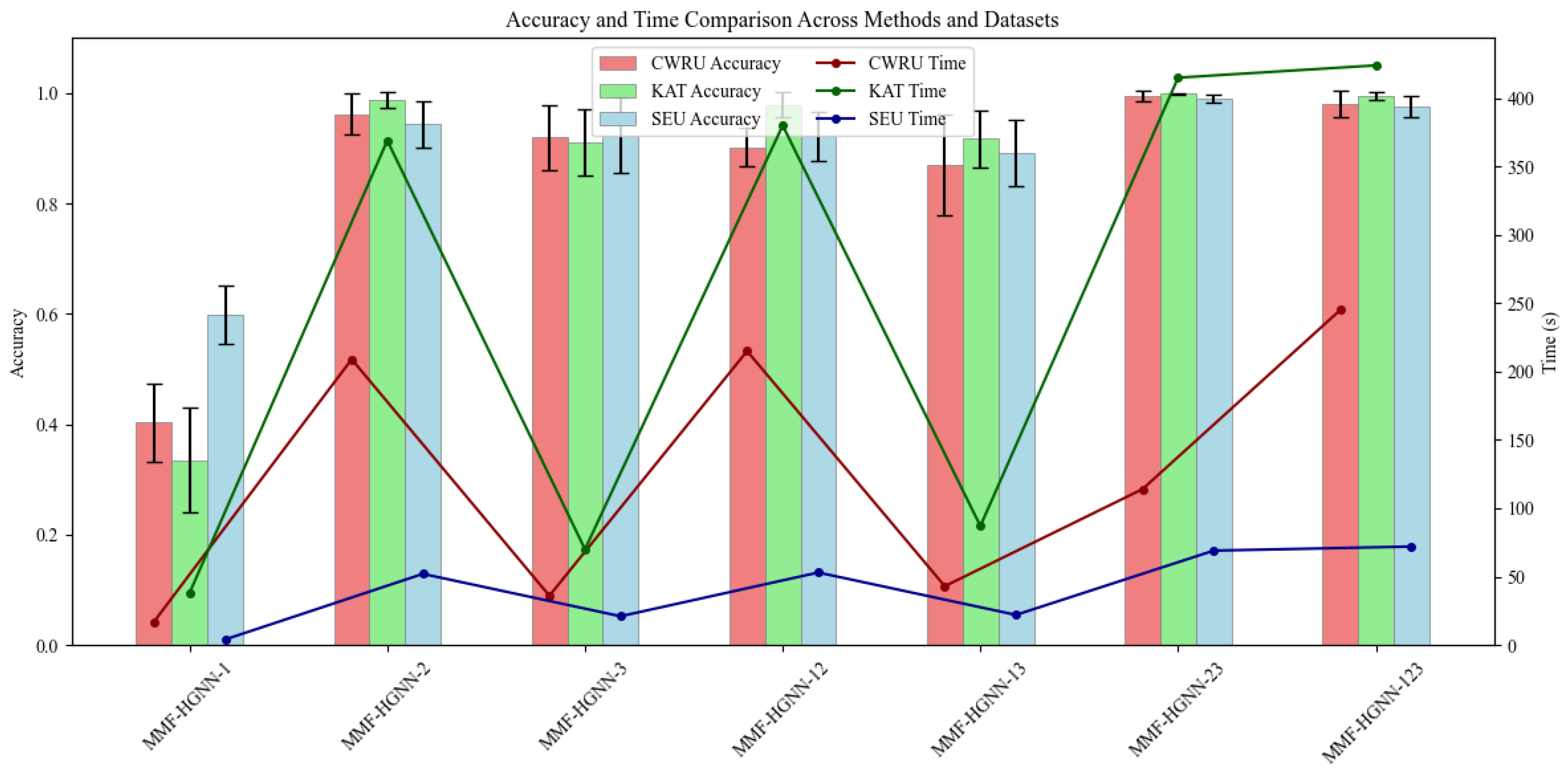
5.3. Ablation Study
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Hou, J.; Lu, X.; Zhong, Y.; He, W.; Zhao, D.; Zhou, F. A comprehensive review of mechanical fault diagnosis methods based on convolutional neural network. J. Vibroeng. 2024, 26, 44–65. [Google Scholar] [CrossRef]
- Misbah, I.; Lee, C.K.M.; Keung, K.L. Fault diagnosis in rotating machines based on transfer learning: Literature review. Knowl.-Based Syst. 2024, 283, 111158. [Google Scholar] [CrossRef]
- An, Y.; Eun, Y. Online Fault Detection for Four Wheeled Skid Steered UGV Using Neural Network. Actuators 2022, 11, 307. [Google Scholar] [CrossRef]
- Xu, X.; Huang, X.; Bian, H.; Wu, J.; Liang, C.; Cong, F. Total process of fault diagnosis for wind turbine gearbox, from the perspective of combination with feature extraction and machine learning: A review. Energy AI 2024, 15, 100318. [Google Scholar] [CrossRef]
- Liu, D.; Cui, L.; Wang, H. Rotating machinery fault diagnosis under time-varying speeds: A review. IEEE Sens. J. 2023, 23, 29969–29990. [Google Scholar] [CrossRef]
- Duan, Z.; Wu, T.; Guo, S.; Shao, T.; Malekian, R.; Li, Z. Development and trend of condition monitoring and fault diagnosis of multi-sensors information fusion for rolling bearings: A review. Int. J. Adv. Manuf. Technol. 2018, 96, 803–819. [Google Scholar] [CrossRef]
- Tiboni, M.; Remino, C.; Bussola, R.; Amici, C. A review on vibration-based condition monitoring of rotating machinery. Appl. Sci. 2022, 12, 972. [Google Scholar] [CrossRef]
- Wei, Y.; Li, Y.; Xu, M.; Huang, W. A review of early fault diagnosis approaches and their applications in rotating machinery. Entropy 2019, 21, 409. [Google Scholar] [CrossRef]
- Li, C.; Zhang, S.; Qin, Y.; Estupinan, E. A systematic review of deep transfer learning for machinery fault diagnosis. Neurocomputing 2020, 407, 121–135. [Google Scholar] [CrossRef]
- Chen, S.; Yu, J.; Wang, S. One-dimensional convolutional neural network-based active feature extraction for fault detection and diagnosis of industrial processes and its understanding via visualization. ISA Trans. 2022, 122, 424–443. [Google Scholar] [CrossRef]
- Li, T.; Sun, C.; Li, S.; Wang, Z.; Chen, X.; Yan, R. Explainable graph wavelet denoising network for intelligent fault diagnosis. IEEE Trans. Neural Netw. Learn. Syst. 2022, 35, 8535–8548. [Google Scholar] [CrossRef] [PubMed]
- Shao, S.; McAleer, S.; Yan, R.; Baldi, P. Highly accurate machine fault diagnosis using deep transfer learning. IEEE Trans. Ind. Inform. 2018, 15, 2446–2455. [Google Scholar] [CrossRef]
- Zhao, D.; Liu, S.; Gu, D.; Sun, X.; Wang, L.; Wei, Y.; Zhang, H. Enhanced data-driven fault diagnosis for machines with small and unbalanced data based on variational auto-encoder. Meas. Sci. Technol. 2019, 31, 035004. [Google Scholar] [CrossRef]
- Gao, X.; Deng, F.; Yue, X. Data augmentation in fault diagnosis based on the Wasserstein generative adversarial network with gradient penalty. Neurocomputing 2020, 396, 487–494. [Google Scholar] [CrossRef]
- Chen, X.; Yang, R.; Xue, Y.; Huang, M.; Ferrero, R.; Wang, Z. Deep transfer learning for bearing fault diagnosis: A systematic review since 2016. IEEE Trans. Instrum. Meas. 2023, 72, 3508221. [Google Scholar] [CrossRef]
- Wu, Z.; Pan, S.; Chen, F.; Long, G.; Zhang, C.; Yu, P.S. A comprehensive survey on graph neural networks. IEEE Trans. Neural Netw. Learn. Syst. 2020, 32, 4–24. [Google Scholar] [CrossRef]
- Gao, Y.; Chen, M.; Yu, D. Semi-supervised graph convolutional network and its application in intelligent fault diagnosis of rotating machinery. Measurement 2021, 186, 110084. [Google Scholar] [CrossRef]
- Wang, H.; Wang, J.; Zhao, Y.; Liu, Q.; Liu, M.; Shen, W. Few-shot learning for fault diagnosis with a dual graph neural network. IEEE Trans. Ind. Inform. 2022, 19, 1559–1568. [Google Scholar] [CrossRef]
- Ji, S.; Li, W.; Wang, Y.; Zhang, B.; Ng, S.-K. A Soft Sensor Model for Predicting the Flow of a Hydraulic Pump Based on Graph Convolutional Network–Long Short-Term Memory. Actuators 2024, 13, 38. [Google Scholar] [CrossRef]
- Berge, C. Graphs and Hypergraphs; Elsevier Science Ltd.: Amsterdam, The Netherlands, 1985. [Google Scholar]
- Feng, Y.; You, H.; Zhang, Z.; Ji, R.; Gao, Y. Hypergraph neural networks. In Proceedings of the AAAI’19: AAAI Conference on Artificial Intelligence, Honolulu, HI, USA, 27 January–1 February 2019; Volume 33, pp. 3558–3565. [Google Scholar]
- Yan, X.; Liu, Y.; Zhang, C.-A. Multiresolution hypergraph neural network for intelligent fault diagnosis. IEEE Trans. Instrum. Meas. 2022, 71, 3525910. [Google Scholar] [CrossRef]
- Ke, H.; Chen, Z.; Xu, J.; Fan, X.; Yang, C.; Peng, T. Time-frequency Hypergraph Neural Network for Rotating Machinery Fault Diagnosis with Limited Data. In Proceedings of the 2023 IEEE 12th Data Driven Control and Learning Systems Conference (DDCLS), Xiangtan, China, 12–14 May 2023; pp. 1786–1792. [Google Scholar]
- Xia, L.; Liang, Y.; Zheng, P.; Huang, X. Residual-hypergraph convolution network: A model-based and data-driven integrated approach for fault diagnosis in complex equipment. IEEE Trans. Instrum. Meas. 2022, 72, 3501811. [Google Scholar] [CrossRef]
- Bai, S.; Zhang, F.; Torr, P.H.S. Hypergraph convolution and hypergraph attention. Pattern Recognit. 2021, 110, 107637. [Google Scholar] [CrossRef]
- Wang, T.; Liu, Z.; Lu, G.; Liu, J. Temporal-spatio graph based spectrum analysis for bearing fault detection and diagnosis. IEEE Trans. Ind. Electron. 2020, 68, 2598–2607. [Google Scholar] [CrossRef]
- Loparo, K.A. Bearing Vibration Dataset. Available online: https://engineering.case.edu/bearingdatacenter/download-data-file (accessed on 9 May 2025).
- Lessmeier, C.; Kimotho, J.K.; Zimmer, D.; Sextro, W. Condition monitoring of bearing damage in electromechanical drive systems by using motor current signals of electric motors: A benchmark data set for data-driven classification. Phm Soc. Eur. Conf. 2016, 3. [Google Scholar] [CrossRef]
- Yu, J.; Zhou, X. One-dimensional residual convolutional autoencoder based feature learning for gearbox fault diagnosis. IEEE Trans. Ind. Inform. 2020, 16, 6347–6358. [Google Scholar] [CrossRef]
- Li, T.; Zhou, Z.; Li, S.; Sun, C.; Yan, R.; Chen, X. The emerging graph neural networks for intelligent fault diagnostics and prognostics: A guideline and a benchmark study. Mech. Syst. Signal Process. 2022, 168, 108653. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fault Location | Fault Diameter (Mils) | Label |
|---|---|---|
| Normal | 0 mils | 0 |
| Inner Race | 7 mils | 1 |
| 14 mils | 2 | |
| 21 mils | 3 | |
| Ball | 7 mils | 4 |
| 14 mils | 5 | |
| 21 mils | 6 | |
| Outer Race | 7 mils | 7 |
| 14 mils | 8 | |
| 21 mils | 9 |
| Fault Type | Sample Number | Bearings for Test |
|---|---|---|
| Normal | 200 × 1 | K003 |
| Outer Ring | 200 × 3 | KA04, KA15, KA16 |
| Mixed | 200 × 3 | KB23, KB24, KB27 |
| Inner Ring | 200 × 3 | KI04, KI16, KI21 |
| Methods | Accuracy | Precision | Recall | F1 Score | Total Time/s |
|---|---|---|---|---|---|
| MFFHGNN | 0.9860 ± 0.049 | 0.9872 ± 0.042 | 0.9860 ± 0.049 | 0.9861 ± 0.048 | 349 s |
| SVM | 0.8620 ± 0.0316 | 0.8775 ± 0.0327 | 0.8620 ± 0.0316 | 0.8552 ± 0.0357 | 22 s |
| 1DCNN | 0.5542 ± 0.1349 | 0.5972 ± 0.1390 | 0.5542 ± 0.1349 | 0.5051 ± 0.1587 | 564 s |
| GCN | 0.3255 ± 0.0408 | 0.2770 ± 0.0797 | 0.3255 ± 0.0408 | 0.2667 ± 0.0512 | 194 s |
| MrHGNN | 0.9670 ± 0.0289 | 0.9704 ± 0.025 | 0.9670 ± 0.0289 | 0.9663 ± 0.0295 | 53 s |
| TFHGNN | 0.6595 ± 0.1096 | 0.6758 ± 0.1095 | 0.6595 ± 0.1095 | 0.6404 ± 0.1143 | 56 s |
| Fault Type | Sample Number | Discription |
|---|---|---|
| Normal | 200 | Normal |
| Chipped | 200 | Gear Bottom Crack |
| Miss | 200 | Gear Missing Tooth |
| Root | 200 | Gear Root Crack |
| Surface | 200 | Gear Surface Wear |
| 5-1. Performance of various metrics on CWRU dataset | |||||
| Methods | Accuracy | Precision | Recall | F1 Score | Total Time/s |
| MMF-HGNN-1 | 0.4033 ± 0.0713 | 0.4519 ± 0.1057 | 0.4033 ± 0.0713 | 0.3804 ± 0.0761 | 17 s |
| MMF-HGNN-2 | 0.9620 ± 0.0367 | 0.9705 ± 0.0251 | 0.9620 ± 0.0367 | 0.9634 ± 0.0341 | 209 s |
| MMF-HGNN-3 | 0.9200 ± 0.0586 | 0.9345 ± 0.0444 | 0.9200 ± 0.0586 | 0.9213 ± 0.0579 | 36 s |
| MMF-HGNN-12 | 0.9020 ± 0.0354 | 0.9184 ± 0.0233 | 0.9020 ± 0.0354 | 0.9025 ± 0.0344 | 215 s |
| MMF-HGNN-13 | 0.8700 ± 0.0918 | 0.8929 ± 0.0649 | 0.8700 ± 0.0918 | 0.8694 ± 0.0933 | 43 s |
| MMF-HGNN-23 | 0.9953 ± 0.0093 | 0.9957 ± 0.0086 | 0.9953 ± 0.0093 | 0.9953 ± 0.0093 | 114 s |
| MMF-HGNN-123 | 0.9800 ± 0.0241 | 0.9827 ± 0.0196 | 0.9800 ± 0.0241 | 0.9798 ± 0.00246 | 245 s |
| 5-2. Performance of various metrics on KAT dataset | |||||
| Methods | Accuracy | Precision | Recall | F1 Score | Total Time/s |
| MMF-HGNN-1 | 0.3350 ± 0.0957 | 0.4408 ± 0.1683 | 0.3350 ± 0.0957 | 0.3325 ± 0.1172 | 38 s |
| MMF-HGNN-2 | 0.9870 ± 0.0144 | 0.9892 ± 0.0118 | 0.9870 ± 0.0144 | 0.9873 ± 0.0140 | 369 s |
| MMF-HGNN-3 | 0.9100 ± 0.0602 | 0.9205 ± 0.0504 | 0.9100 ± 0.0602 | 0.9107 ± 0.0596 | 70 s |
| MMF-HGNN-12 | 0.9790 ± 0.0224 | 0.9850 ± 0.0156 | 0.9790 ± 0.0224 | 0.9797 ± 0.0217 | 380 s |
| MMF-HGNN-13 | 0.9170 ± 0.0520 | 0.9371 ± 0.0329 | 0.9170 ± 0.0520 | 0.9185 ± 0.0504 | 87 s |
| MMF-HGNN-23 | 0.9990 ± 0.0020 | 0.9990 ± 0.0019 | 0.9990 ± 0.0020 | 0.9990 ± 0.0020 | 415 s |
| MMF-HGNN-123 | 0.9950 ± 0.0063 | 0.9952 ± 0.0060 | 0.9950 ± 0.0063 | 0.9950 ± 0.0063 | 424 s |
| 5-3. Performance of various metrics on SEU dataset | |||||
| Methods | Accuracy | Precision | Recall | F1 Score | Total Time/s |
| MMF-HGNN-1 | 0.5980 ± 0.0530 | 0.6321 ± 0.0566 | 0.5980 ± 0.0530 | 0.5960 ± 0.0544 | 4 s |
| MMF-HGNN-2 | 0.9440 ± 0.0415 | 0.9500 ± 0.0337 | 0.9440 ± 0.0415 | 0.9438 ± 0.0420 | 52 s |
| MMF-HGNN-3 | 0.9240 ± 0.0680 | 0.9258 ± 0.0687 | 0.9240 ± 0.0680 | 0.9236 ± 0.0684 | 21 s |
| MMF-HGNN-12 | 0.9220 ± 0.0442 | 0.9260 ± 0.0451 | 0.9220 ± 0.0442 | 0.9222 ± 0.0440 | 53 s |
| MMF-HGNN-13 | 0.8920 ± 0.0596 | 0.9006 ± 0.0530 | 0.8920 ± 0.0596 | 0.8916 ± 0.0620 | 22 s |
| MMF-HGNN-23 | 0.9900 ± 0.0077 | 0.9903 ± 0.0075 | 0.9900 ± 0.0077 | 0.9900 ± 0.0077 | 69 s |
| MMF-HGNN-123 | 0.9760 ± 0.0191 | 0.9772 ± 0.0189 | 0.9760 ± 0.0191 | 0.9759 ± 0.0194 | 72 s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, J.; Hu, J.; Sheng, B. Multi-Metric Fusion Hypergraph Neural Network for Rotating Machinery Fault Diagnosis. Actuators 2025, 14, 242. https://doi.org/10.3390/act14050242
Zhu J, Hu J, Sheng B. Multi-Metric Fusion Hypergraph Neural Network for Rotating Machinery Fault Diagnosis. Actuators. 2025; 14(5):242. https://doi.org/10.3390/act14050242
Chicago/Turabian StyleZhu, Jiaxing, Junlan Hu, and Buyun Sheng. 2025. "Multi-Metric Fusion Hypergraph Neural Network for Rotating Machinery Fault Diagnosis" Actuators 14, no. 5: 242. https://doi.org/10.3390/act14050242
APA StyleZhu, J., Hu, J., & Sheng, B. (2025). Multi-Metric Fusion Hypergraph Neural Network for Rotating Machinery Fault Diagnosis. Actuators, 14(5), 242. https://doi.org/10.3390/act14050242