
Adaptive Super-Twisting Controller-Based Modified Extended State Observer for Permanent Magnet Synchronous Motors



Abstract
:1. Introduction
2. PMSM Mathematical Model
- (1)
- The three-phase stator current of the motor is a sine wave, the phase difference is 120 degrees, and the amplitude is equal.
- (2)
- The magnetic saturation phenomenon of the iron core is ignored.
- (3)
- The eddy current phenomenon is ignored, and there is no other form of hysteresis loss.
3. Controller Design
3.1. Sliding Mode Control
3.2. Super-Twisting Control
3.3. Adaptive Super-Twisting Control
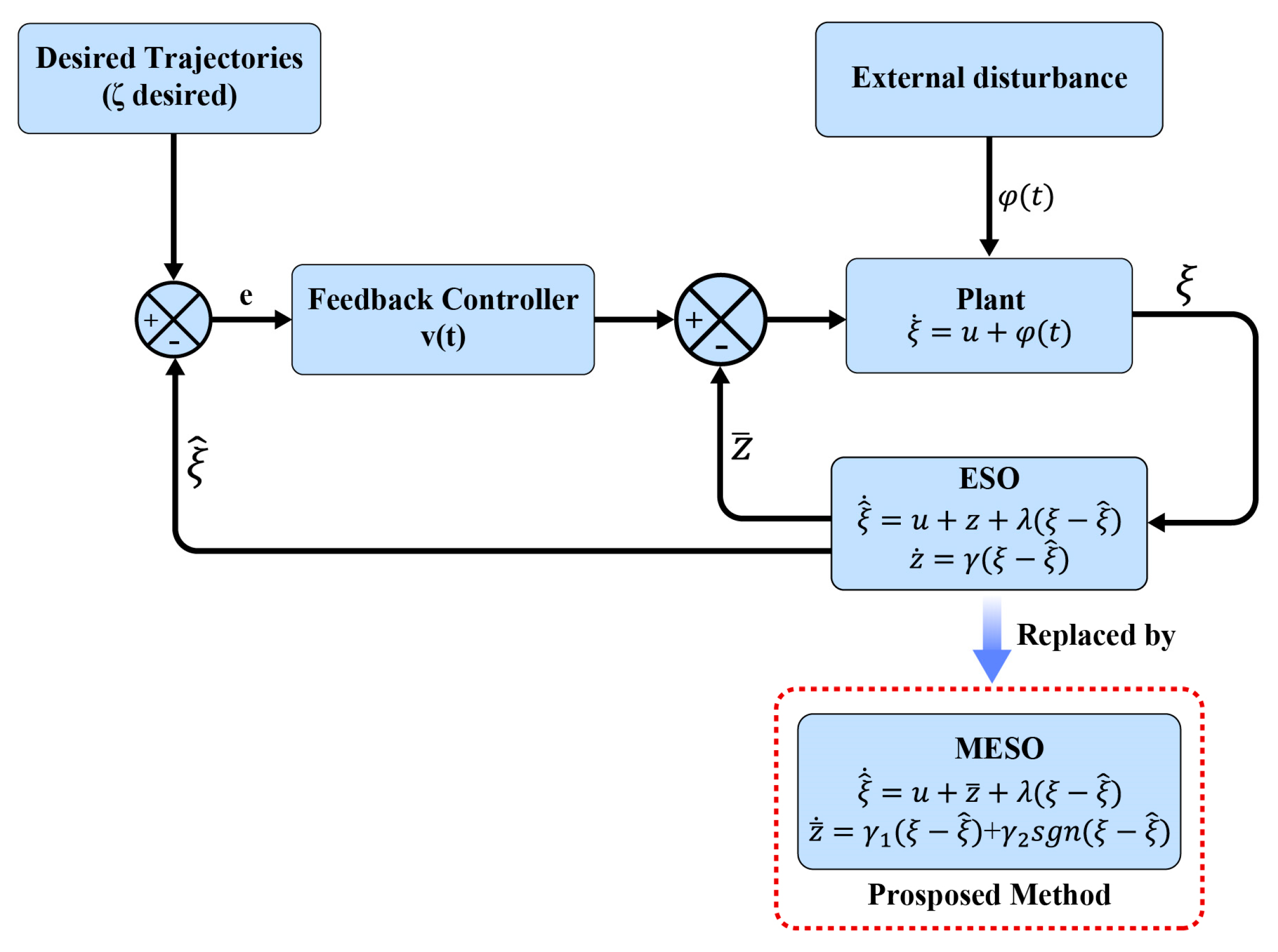
4. Observer Design
4.1. Extended State Observer
4.2. Modified Extended State Observer
4.3. MESO Stability Analysis
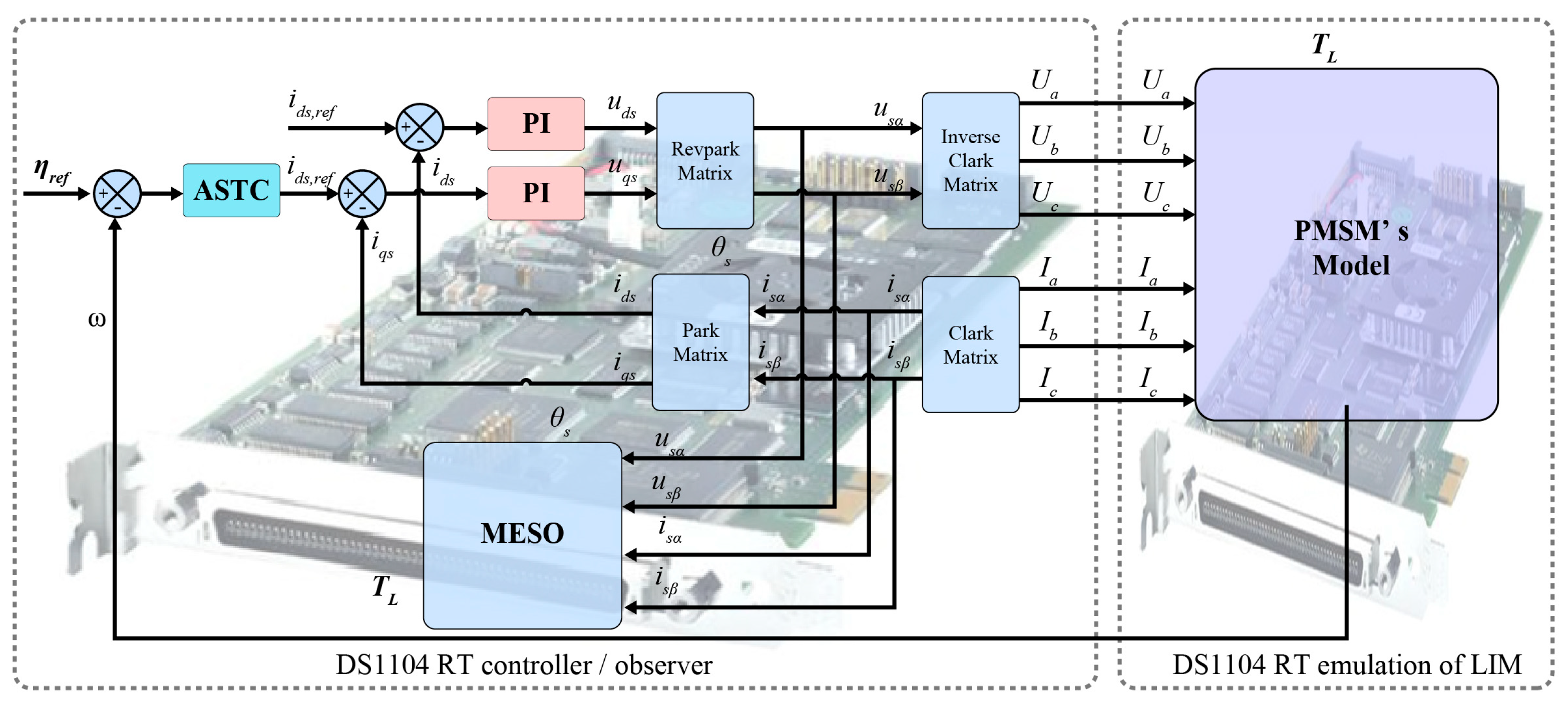
5. Hardware-in-the Loop (HIL) Validation
5.1. HIL Experiment Test
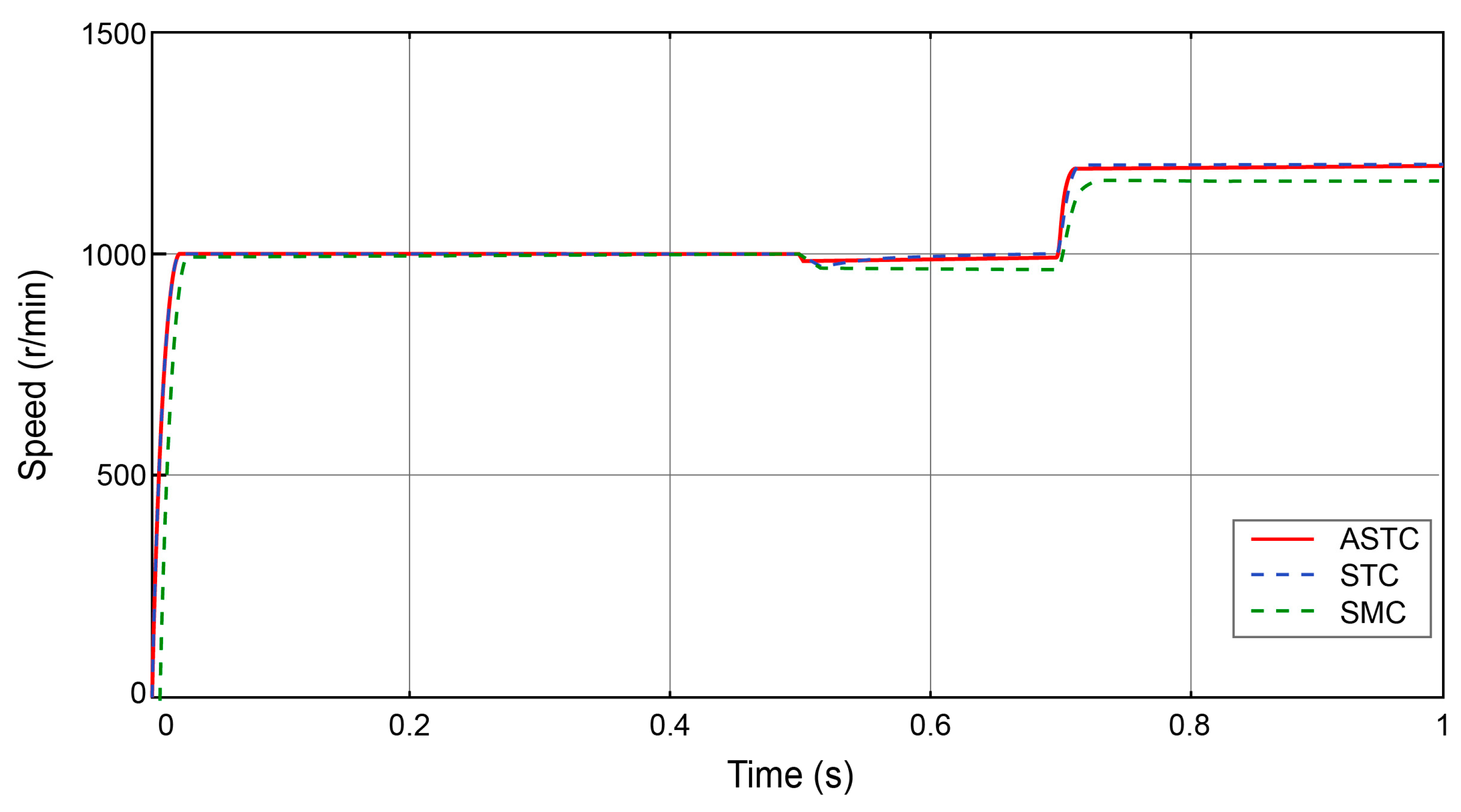
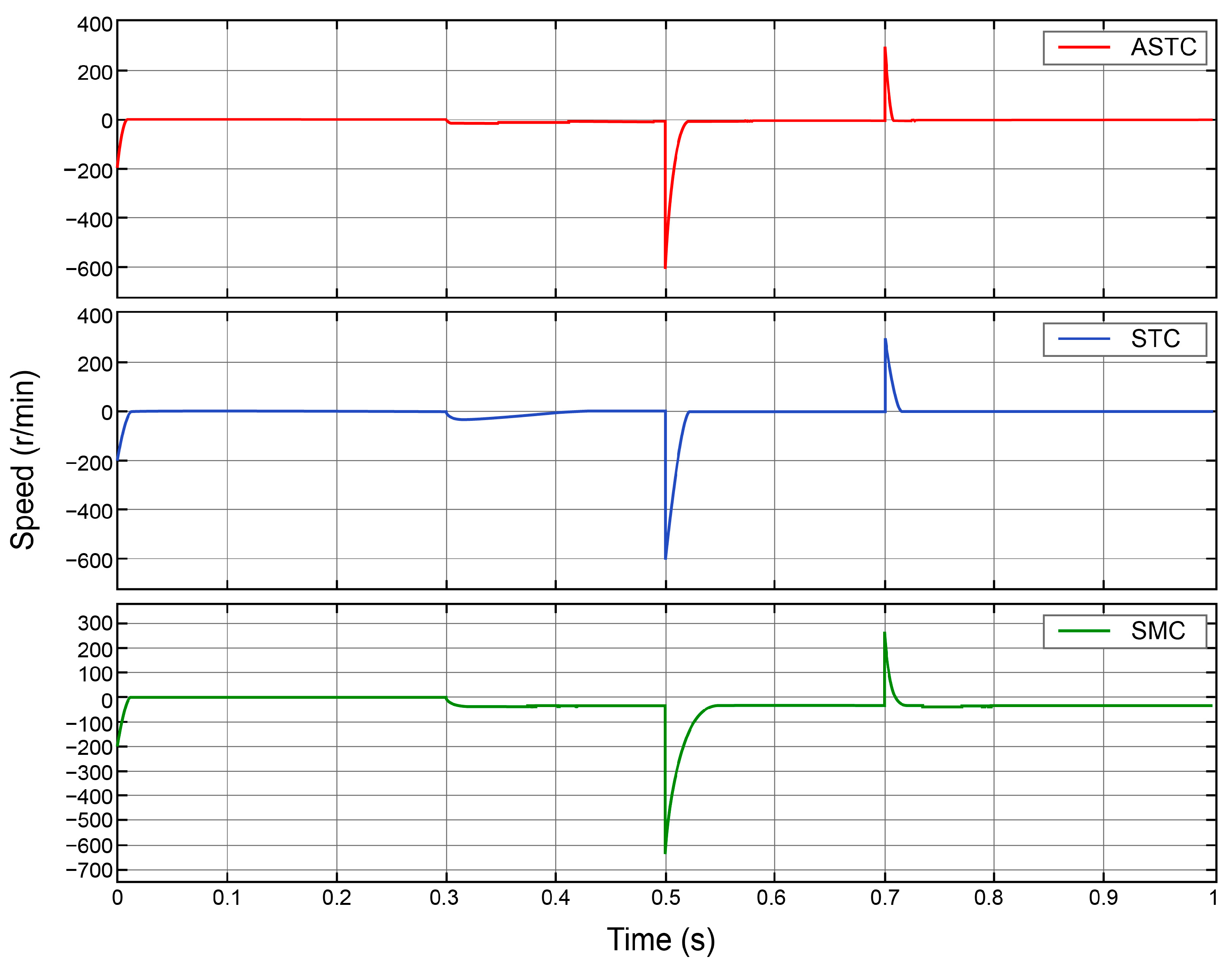
5.2. Control Performance Analysis
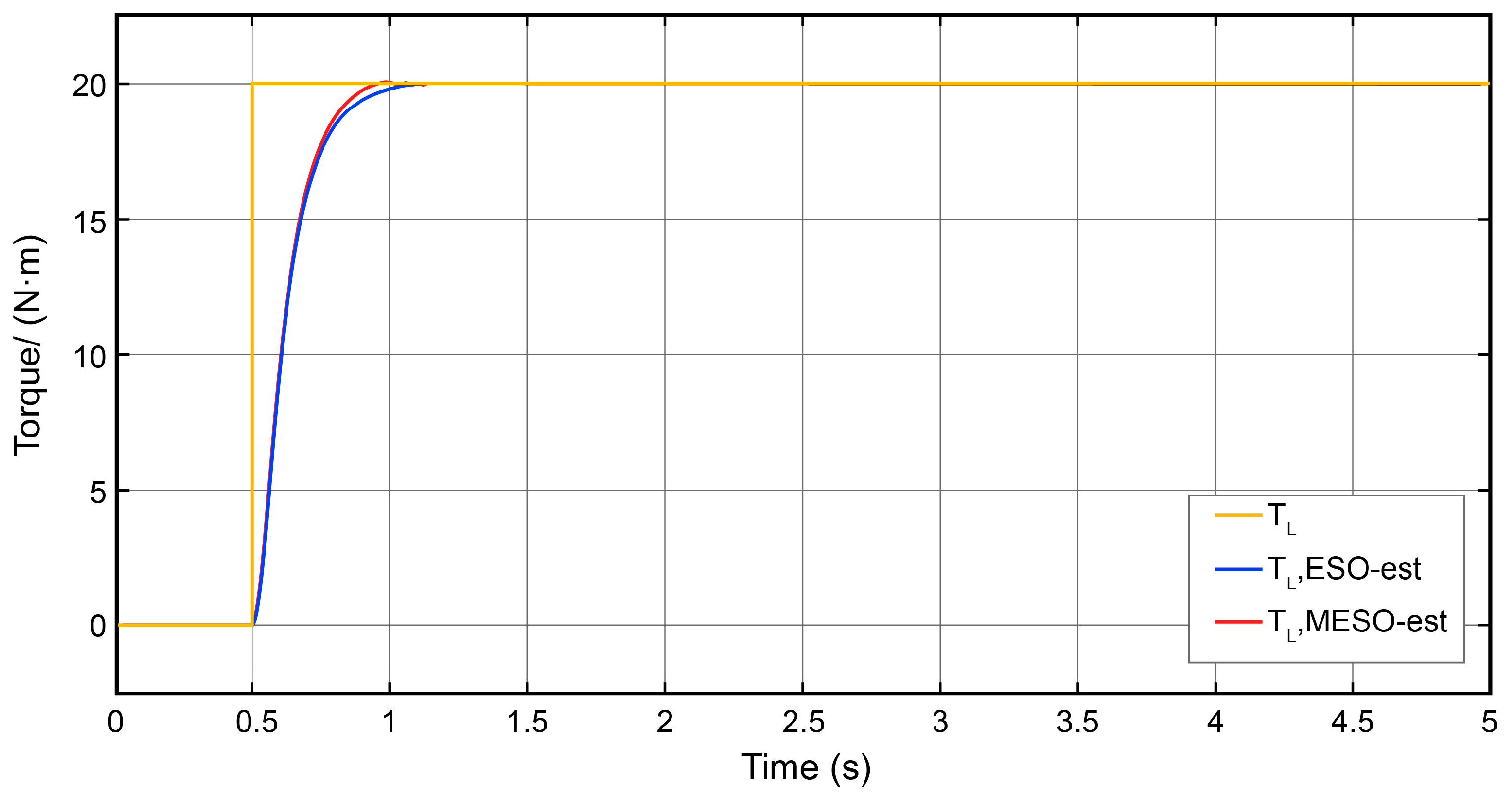
5.3. Observer Performance Analysis
6. Conclusions
- The ASTC ensures efficient PMSM operation in a wide range of operating conditions, effectively handling disturbances and uncertainties such as parameter variations, load disturbances, and voltage fluctuations. By dynamically adjusting the sliding mode control law and optimizing control parameters, the ASTC enables rapid, accurate regulation of motor states while minimizing chattering and reducing energy consumption, thereby enhancing precision and efficiency in real-time control.
- The ASTC demonstrates exceptional robustness and adaptability, ensuring stable performance even under significant disturbances. The strategy maintains high control precision even with changing motor parameters, highlighting its significant potential for industrial applications that require real-time, reliable performance.
- While the ASTC successfully improves system robustness, challenges remain in optimizing the transient response to abrupt load changes. Future work will focus on refining this aspect by developing a multi-rate tuning strategy to balance fast convergence with effective suppression of overshoot, improving overall system stability.
- The MESO effectively compensates for matched disturbances but remains dependent on accurate motor parameter identification. Under extreme operating conditions where parameter values are difficult to obtain or fluctuate, the MESO’s performance may be impacted. This limitation is particularly relevant in systems where precise parameter values are hard to determine.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Brown, T.; Davis, K. Industrial applications of permanent magnet synchronous motors: A review. IEEE Trans. Ind. Appl. 2022, 58, 2345–2356. [Google Scholar]
- Zhang, X.; Li, Y. Advanced control strategies for permanent magnet synchronous motors: A review. IEEE Trans. Ind. Electron. 2023, 70, 4123–4135. [Google Scholar]
- Sun, X.; Wu, M.; Lei, G.; Guo, Y.; Zhu, J. An Improved Model Predictive Current Control for PMSM Drives Based on Current Track Circle. IEEE Trans. Ind. Electron. 2020, 68, 3782–3793. [Google Scholar] [CrossRef]
- Mu, X.; Zeng, F.; Cui, Y.; Song, S.; Yao, Y. A Deadbeat Predictive Current Control Method of PMSM Based on Double Disturbance Observer. Lect. Notes Electr. Eng. 2022, 644, 2541–2548. [Google Scholar]
- Carlet, P.; Favato, A.; Bolognani, S.; Dorfler, F. Data-Driven Continuous-Set Predictive Current Control for Synchronous Motor Drives. IEEE Trans. Power Electron. 2022, 37, 6637–6646. [Google Scholar] [CrossRef]
- Li, J.; Liu, B.; Li, S.; Yu, B.; Feng, J.; Song, W. Dead-beat Predictive Control of Permanent Magnet Synchronous Motors with Improved Dead-time Compensation. In Proceedings of the 2021 IEEE International Conference on Predictive Control of Electrical Drives and Power Electronics (PRECEDE), Jinan, China, 20–22 November 2021; pp. 336–340. [Google Scholar]
- Luo, G.; Zhang, R.; Chen, Z.; Tu, W.; Zhang, S.; Kennel, R. A Novel Nonlinear Modeling Method for Permanent-Magnet Synchronous Motors. IEEE Trans. Ind. Electron. 2016, 63, 6490–6498. [Google Scholar] [CrossRef]
- Jung, S.Y.; Hong, J.; Nam, K. Current minimizing torque control of the IPMSM using Ferrari’s method. IEEE Trans. Power Electron. 2013, 28, 5603–5617. [Google Scholar] [CrossRef]
- Li, S.; Han, D.; Sarlioglu, B. Modeling of Interior Permanent Magnet Machine Considering Saturation, Cross Coupling, Spatial Harmonics, and Temperature Effects. IEEE Trans. Transp. Electrif. 2017, 3, 682–693. [Google Scholar] [CrossRef]
- Drobnič, K.; Gašparin, L.; Fišer, R. Fast and accurate model of interior permanent-magnet machine for dynamic characterization. Energies 2019, 12, 783. [Google Scholar] [CrossRef]
- Zhang, Q.; Guo, H.; Guo, C.; Liu, Y.; Wang, D.; Lu, K.; Chen, D. An adaptive proportional-integral-resonant controller for speed ripple suppression of PMSM drive due to current measurement error. Int. J. Electr. Power Energy Syst. 2021, 129, 106866. [Google Scholar] [CrossRef]
- Sarathkumar, D.; Raj, R.A.; Sidthik Akbar, S.; Rajesh Kanna, R.; Andrews, L.J.B.; Alagappan, A. IOT Based Motor Control and Line Detection for Smart Agriculture. In Proceedings of the 2024 IEEE International Students’ Conference on Electrical, Electronics and Computer Science, Bhopal, India, 24–25 February 2024; pp. 1–6. [Google Scholar]
- Geetha, E.; Nagarajan, C. Stochastic Rule Control Algorithm Based Enlistment of Induction Motor Parameters Monitoring in IoT Applications. Wirel. Pers. Commun. 2018, 102, 3629–3645. [Google Scholar]
- Vlachou, E.I.; Vlachou, V.I.; Efstathiou, D.E.; Karakatsanis, T.S. Overview of IoT Security Challenges and Sensors Specifications in PMSM for Elevator Applications. Machines 2024, 12, 839. [Google Scholar] [CrossRef]
- Attestog, S.; Senanayaka, J.S.L.; Van Khang, H.; Robbersmyr, K.G. Robust Active Learning Multiple Fault Diagnosis ofPMSM Drives With Sensorless Control Under Dynamic Operations and Imbalanced Datasets. IEEE Trans. Ind. Inform. 2023, 19, 9291–9301. [Google Scholar]
- Riaz, S.; Qi, R.; Tutsoy, O.; Iqbal, J. A novel adaptive PD-type iterative learning control of the PMSM servo system with the friction uncertainty in low speeds. PLoS ONE 2023, 18, e0279253. [Google Scholar] [CrossRef] [PubMed]
- Li, W.; Xu, Z.; Zhang, Y. Induction motor control system based on FOC algorithm. In Proceedings of the 2019 IEEE 8th Joint International Information Technology and Artificial Intelligence Conference (ITAIC), Chongqing, China, 24–26 May 2019; pp. 1544–1548. [Google Scholar]
- Abirami, M.; Balakrishnan, P. DTC-FOC Hybrid Controller to Control the Speed and Torque of BLDC Motor. In Proceedings of the 2023 Innovations in Power and Advanced Computing Technologies (i-PACT), Kuala Lumpur, Malaysia, 8–10 December 2023; pp. 1–6. [Google Scholar]
- Huang, Y.; Gao, X.; Song, Z.; Liu, X.; Liu, C. A Novel Wireless Motor Based on Three-Phase Six-Stator-Winding PMSM. IEEE Trans. Ind. Electron. 2024, 71, 7590–7598. [Google Scholar]
- Liu, Z.; Zhao, Y.; Zhang, O.; Chen, W.; Wang, J.; Gao, Y.; Liu, J. A Novel Faster Fixed-Time Adaptive Control for Robotic Systems With Input Saturation. IEEE Trans. Ind. Electron. 2023, 71, 5215–5223. [Google Scholar]
- Romanov, A.M.; Slaschev, B.V.; Volkova, M.A. A comparison of hardware implementations of FOC controllers for asynchronous motor drive based on FPGA. In Proceedings of the 2016 2nd International Conference on Industrial Engineering, Applications and Manufacturing (ICIEAM), Chelyabinsk, Russia, 19–20 May 2016; pp. 1–5. [Google Scholar]
- Guo, X.; Wang, W.; Song, S. Design of Permanent Magnet Submersible Motor Driving System Based on FOC Algorithm. In Proceedings of the 2023 26th International Conference on Electrical Machines and Systems (ICEMS), Zhuhai, China, 5–8 November 2023; pp. 4943–4946. [Google Scholar]
- Çavuş, B.; Aktaş, M. MPC-Based Flux Weakening Control for Induction Motor Drive With DTC for Electric Vehicles. IEEE Trans. Power Electron. 2023, 38, 4430–4439. [Google Scholar]
- Payami, S.; Behera, R.K.; Iqbal, A. DTC of Three-Level NPC Inverter Fed Five-Phase Induction Motor Drive With Novel Neutral Point Voltage Balancing Scheme. IEEE Trans. Power Electron. 2018, 33, 1487–1500. [Google Scholar] [CrossRef]
- Holakooie, M.H.; Ojaghi, M.; Taheri, A. Modified DTC of a Six-Phase Induction Motor With a Second-Order Sliding-Mode MRAS-Based Speed Estimator. IEEE Trans. Power Electron. 2019, 34, 600–611. [Google Scholar]
- Niu, F.; Huang, X.; Ge, L.; Zhang, J.; Wu, L.; Wang, Y.; Li, K.; Fang, Y. A Simple and Practical Duty Cycle Modulated Direct Torque Control for Permanent Magnet Synchronous Motors. IEEE Trans. Power Electron. 2019, 34, 1572–1579. [Google Scholar]
- Shinohara, A.; Inoue, Y.; Morimoto, S.; Sanada, M. Direct Calculation Method of Reference Flux Linkage for Maximum Torque per Ampere Control in DTC-Based IPMSM Drives. IEEE Trans. Power Electron. 2017, 32, 2114–2122. [Google Scholar] [CrossRef]
- Yin, Y.; Liu, L.; Vazquez, S.; Xu, R.; Dong, Z.; Liu, J. Disturbance and Uncertainty Attenuation for Speed Regulation of PMSM Servo System Using Adaptive Optimal Control Strategy. IEEE Trans. Transp. Electrif. 2023, 9, 3410–3420. [Google Scholar]
- Zhang, K.; Wang, L.; Fang, X. Adaptive Nonlinear Speed Tracking Control of Permanent Magnet Linear Synchronous Motor Based on I&I Theory. IEEE Trans. Ind. Appl. 2024, 60, 7835–7843. [Google Scholar]
- Lin, X.; Wu, C.; Yao, W.; Liu, Z.; Shen, X.; Xu, R.; Sun, G.; Liu, J. Observer-Based Fixed-Time Control for Permanent-Magnet Synchronous Motors With Parameter Uncertainties. IEEE Trans. Power Electron. 2023, 38, 4335–4344. [Google Scholar]
- Wang, Y.; Zhou, M.; Hou, D.; Cao, W.; Huang, X. Composite Data Driven-Based Adaptive Control for a Piezoelectric Linear Motor. IEEE Trans. Instrum. Meas. 2022, 71, 1–12. [Google Scholar]
- Wang, X.; Wang, W.; Li, L.; Shi, J.; Xie, B. Adaptive Control of DC Motor Servo System With Application to Vehicle Active Steering. IEEE/ASME Trans. Mechatron. 2019, 24, 1054–1063. [Google Scholar]
- Li, Y.; Liu, D.; Wu, T.; Guo, W.; Zhang, X.; Deng, Y. Model Predictive Current Control for Permanent Magnet Synchronous Motor based on Neural Network. In Proceedings of the 2023 IEEE International Conference on Predictive Control of Electrical Drives and Power Electronics (PRECEDE), Wuhan, China, 16–19 June 2023; pp. 1–6. [Google Scholar]
- Li, Y.; Zhang, P.; Hang, J.; Ding, S.; Liu, L.; Wang, Q. Comparison of dynamic characteristics of field oriented control and model predictive control for permanent magnet synchronous motor. In Proceedings of the 2018 13th IEEE Conference on Industrial Electronics and Applications (ICIEA), Wuhan, China, 31 May–2 June 2018; pp. 2431–2434. [Google Scholar]
- Lin, R.; Huang, S.; Cao, G.; Wu, C. Model-Predictive-Control-Based Speed Control Strategies of Permanent Magnet Synchronous Motors. In Proceedings of the 2023 IEEE International Conference on Predictive Control of Electrical Drives and Power Electronics (PRECEDE), Wuhan, China, 16–19 June 2023; pp. 1–7. [Google Scholar]
- Li, Y.; Miao, Z.; Zhang, L.; Zhang, H. Application of Finite Set Model Predictive Control to Five-Phase Induction Motors. In Proceedings of the 2023 5th International Conference on Electrical Engineering and Control Technologies (CEECT), Chengdu, China, 15–17 December 2023; pp. 469–473. [Google Scholar]
- Santos, T.B.D.; Oliani, I.; Figueiredo, R.; Albieiro, D.; Pelizari, A.; Sguarezi Filho, A.J. Robust Finite Control Set Model Predictive Current Control for Induction Motor Using Deadbeat Approach in Stationary Frame. IEEE Access 2023, 11, 13067–13078. [Google Scholar]
- Zhou, Z.; Wang, J.; Zhang, S. Speed Synchronization Control Strategy of Dual-Motor System With Explicit Model Predictive Control. IEEE J. Emerg. Sel. Top. Power Electron. 2024, 12, 2787–2798. [Google Scholar] [CrossRef]
- Kim, S.H.; Kim, K.K.K. Model Predictive Control for Energy-Efficient Yaw-Stabilizing Torque Vectoring in Electric Vehicles With Four In-Wheel Motors. IEEE Access 2023, 11, 37665–37680. [Google Scholar] [CrossRef]
- Hou, P.; Wang, X.; Sheng, Y. Research on Flux-Weakening Control System of Interior Permanent Magnet Synchronous Motor Based on Fuzzy Sliding Mode Control. In Proceedings of the 2019 Chinese Control And Decision Conference (CCDC), Nanchang, China, 3–5 June 2019; pp. 3151–3156. [Google Scholar]
- Jia, L.; Huang, Y.; Zheng, J.; Chen, J.; Tao, Y.; Li, P. Fuzzy Sliding Mode Control of Permanent Magnet Synchronous Motor Based on the Integral Sliding Mode Surface. In Proceedings of the 2019 22nd International Conference on Electrical Machines and Systems (ICEMS), Harbin, China, 11–14 August 2019; pp. 1–6. [Google Scholar]
- Zhu, C.; Tu, Q.; Jiang, C.; Pan, M.; Huang, H. A Cross Coupling Control Strategy for Dual-Motor Speed Synchronous System Based on Second Order Global Fast Terminal Sliding Mode Control. IEEE Access 2020, 8, 217967–217976. [Google Scholar]
- Liu, Z.; Lin, X.; Gao, Y.; Xu, R.; Wang, J.; Wang, Y.; Liu, J. Fixed-Time Sliding Mode Control for DC/DC Buck Converters With Mismatched Uncertainties. IEEE Trans. Circuits Syst. I Regul. Pap. 2023, 70, 472–480. [Google Scholar] [CrossRef]
- Liu, Z.; Liu, J.; Zhang, O.; Zhao, Y.; Chen, W.; Gao, Y. Adaptive Disturbance Observer-Based Fixed-Time Tracking Control for Uncertain Robotic Systems. IEEE Trans. Ind. Electron. 2024, 71, 14823–14831. [Google Scholar]
- Zhao, K.; Yang, L.; Zhao, S.; Hu, H. A Hybrid Control Strategy for Sensorless PMSM with a Super-Twisting Sliding Mode Observer and a Two-stage Filter Based on Fuzzy Rules. In Proceedings of the IECON 2022–48th Annual Conference of the IEEE Industrial Electronics Society, Brussels, Belgium, 17–20 October 2022; pp. 1–7. [Google Scholar]
- Hou, Q.; Ding, S. Finite-Time Extended State Observer-Based Super-Twisting Sliding Mode Controller for PMSM Drives With Inertia Identification. IEEE Trans. Transp. Electrif. 2022, 8, 1918–1929. [Google Scholar] [CrossRef]
- Lin, C.; Sun, S.; Walker, P.; Zhang, N. Accelerated Adaptive Second Order Super-Twisting Sliding Mode Observer. IEEE Access 2019, 7, 25232–25238. [Google Scholar] [CrossRef]
- Gao, P.; Zhang, G.; Ouyang, H.; Mei, L. An Adaptive Super Twisting Nonlinear Fractional Order PID Sliding Mode Control of Permanent Magnet Synchronous Motor Speed Regulation System Based on Extended State Observer. IEEE Access 2020, 8, 53498–53510. [Google Scholar]
- Singh, S.; Goyal, J.K.; Sachan, A.; N, A.P.; Tiwari, A.K.; Kamal, S.; Ghosh, S.; Purwar, S.; Xiong, X. Modified ESO based disturbance rejection for dynamical systems: An experimental study. J. Process Control 2024, 141, 103263. [Google Scholar] [CrossRef]
- Edwards, C.; Shtessel, Y.B. Adaptive continuous higher order sliding mode control. Automatica 2016, 65, 183–190. [Google Scholar] [CrossRef]
- Smith, R.; Johnson, L. Challenges and opportunities in high-performance motor drives for electric vehicles. J. Power Electron. 2023, 18, 567–579. [Google Scholar]
- Wang, H.; Chen, Z. Adaptive super-twisting sliding mode control for nonlinear systems with uncertainties. Automatica 2022, 115, 108912. [Google Scholar]
- Liu, J.; Sun, M. Enhanced extended state observer design for disturbance estimation in motor drives. IEEE Trans. Power Electron. 2024, 39, 1234–1245. [Google Scholar]
- Obeid, H.; Laghrouche, S.; Fridman, L.; Chitour, Y.; Harmouche, M. Barrier Function-Based Adaptive Super-Twisting Controller. IEEE Trans. Autom. Control 2020, 65, 4928–4933. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Definition | Value |
|---|---|---|
| Stator phase resistance | 0.5 (Ω) | |
| Ls | Stator phase inductance | 0.0014 (H) |
| p | Number of pole pairs | 3 (pairs) |
| ψ | Flux linkage | 0.149 (Wb) |
| Fr | Damping coefficient | 0.0001 (N·m·s) |
| Moment of inertia | 0.016 (kg·m2) | |
| U | DC bus voltage | 400 (V) |
| Static friction coefficient | 0.0002024 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pan, L.; Fu, C.; Chen, B. Adaptive Super-Twisting Controller-Based Modified Extended State Observer for Permanent Magnet Synchronous Motors. Actuators 2025, 14, 161. https://doi.org/10.3390/act14040161
Pan L, Fu C, Chen B. Adaptive Super-Twisting Controller-Based Modified Extended State Observer for Permanent Magnet Synchronous Motors. Actuators. 2025; 14(4):161. https://doi.org/10.3390/act14040161
Chicago/Turabian StylePan, Lili, Chunyun Fu, and Bin Chen. 2025. "Adaptive Super-Twisting Controller-Based Modified Extended State Observer for Permanent Magnet Synchronous Motors" Actuators 14, no. 4: 161. https://doi.org/10.3390/act14040161
APA StylePan, L., Fu, C., & Chen, B. (2025). Adaptive Super-Twisting Controller-Based Modified Extended State Observer for Permanent Magnet Synchronous Motors. Actuators, 14(4), 161. https://doi.org/10.3390/act14040161