

Adaptive Output Regulation for PMSM Speed Servo System via Time-Varying Internal Model Approach


Abstract
1. Introduction
- A time-varying internal-model-based adaptive controller is proposed, which can achieve high-precision speed tracking of PMSM under parameter uncertainties and load torque disturbance with unknown time-varying frequencies. Compared with the existing output regulation methods [24,25,26], the frequencies of the load torque disturbances can be unknown and time-varying.
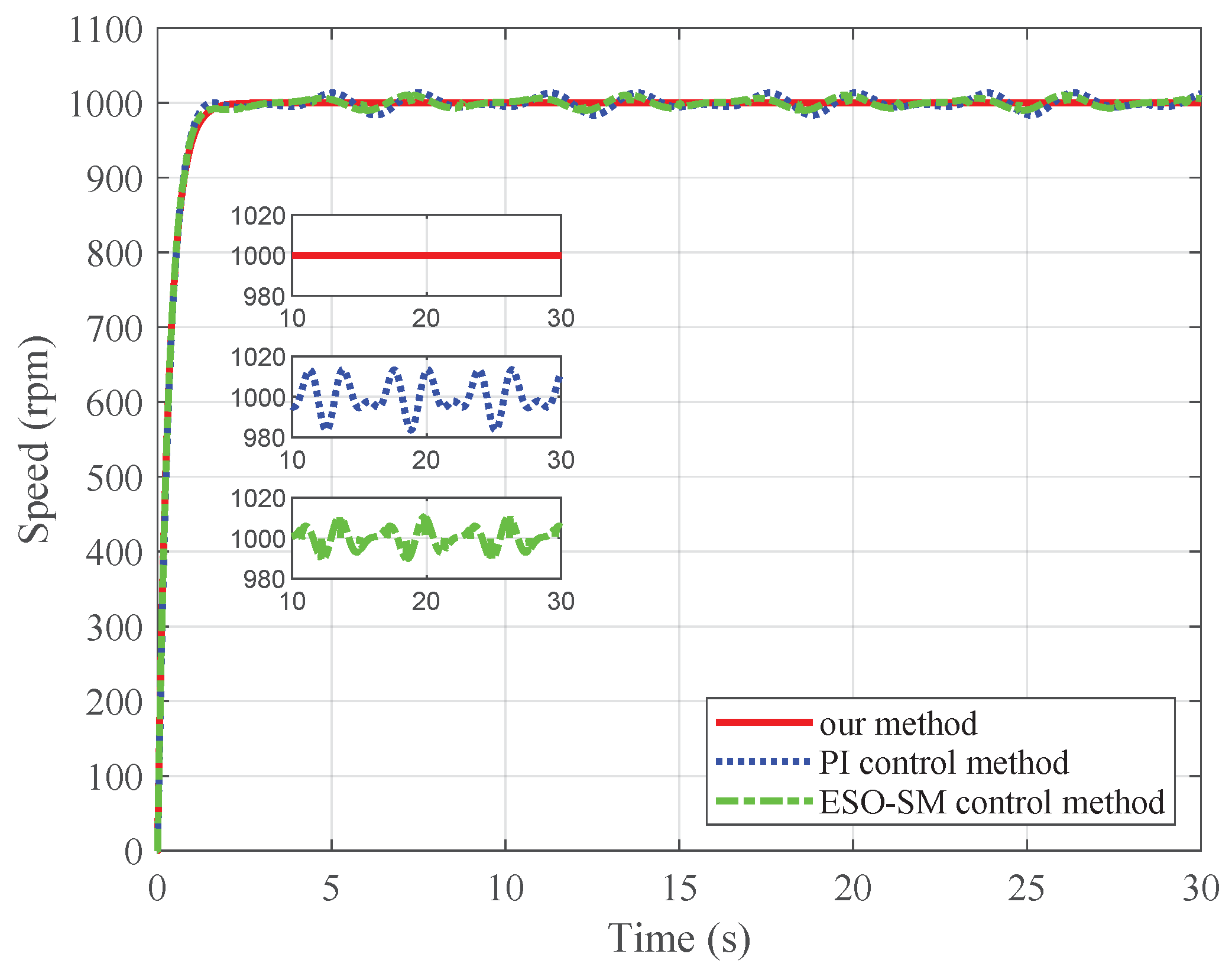
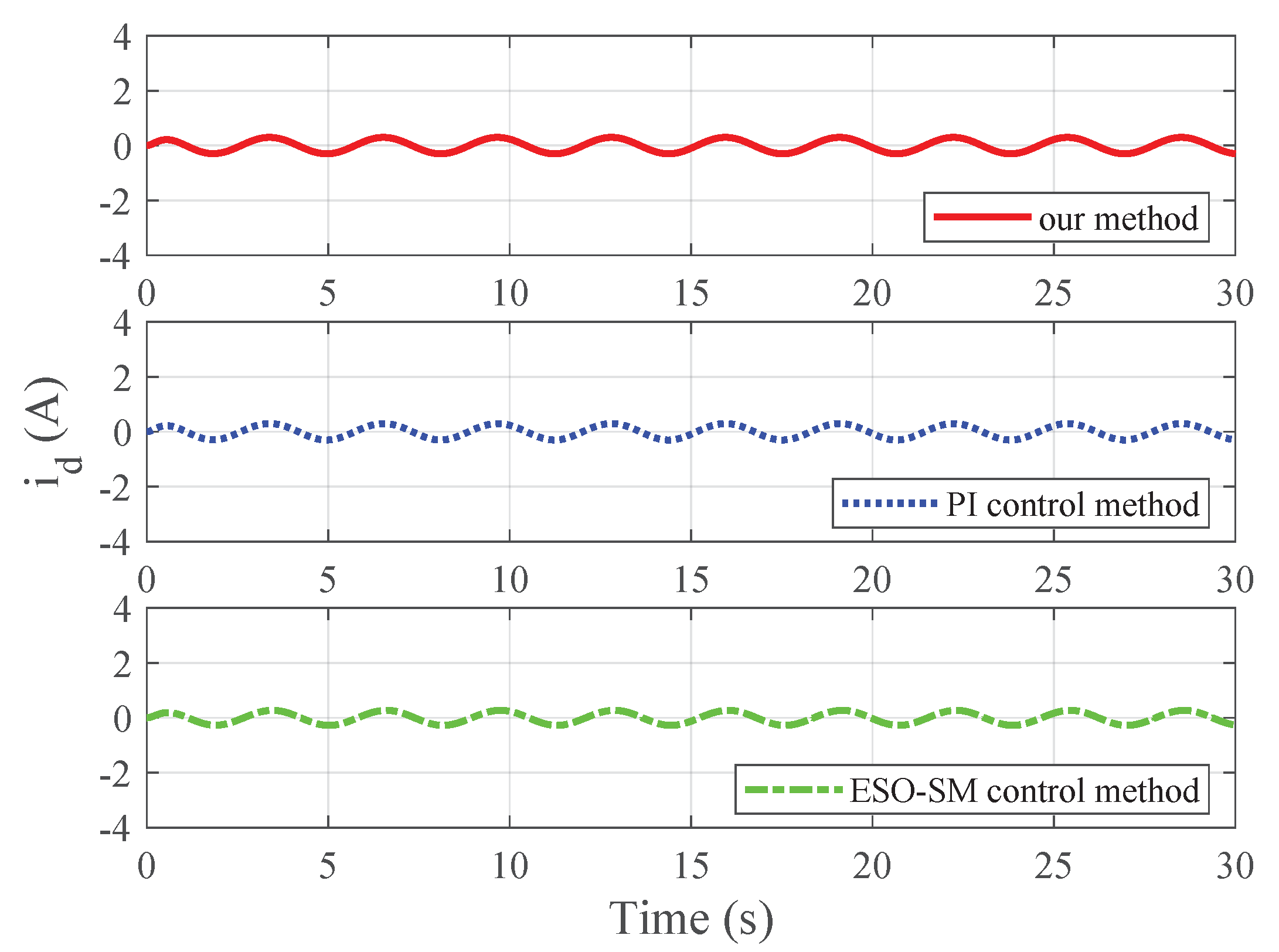
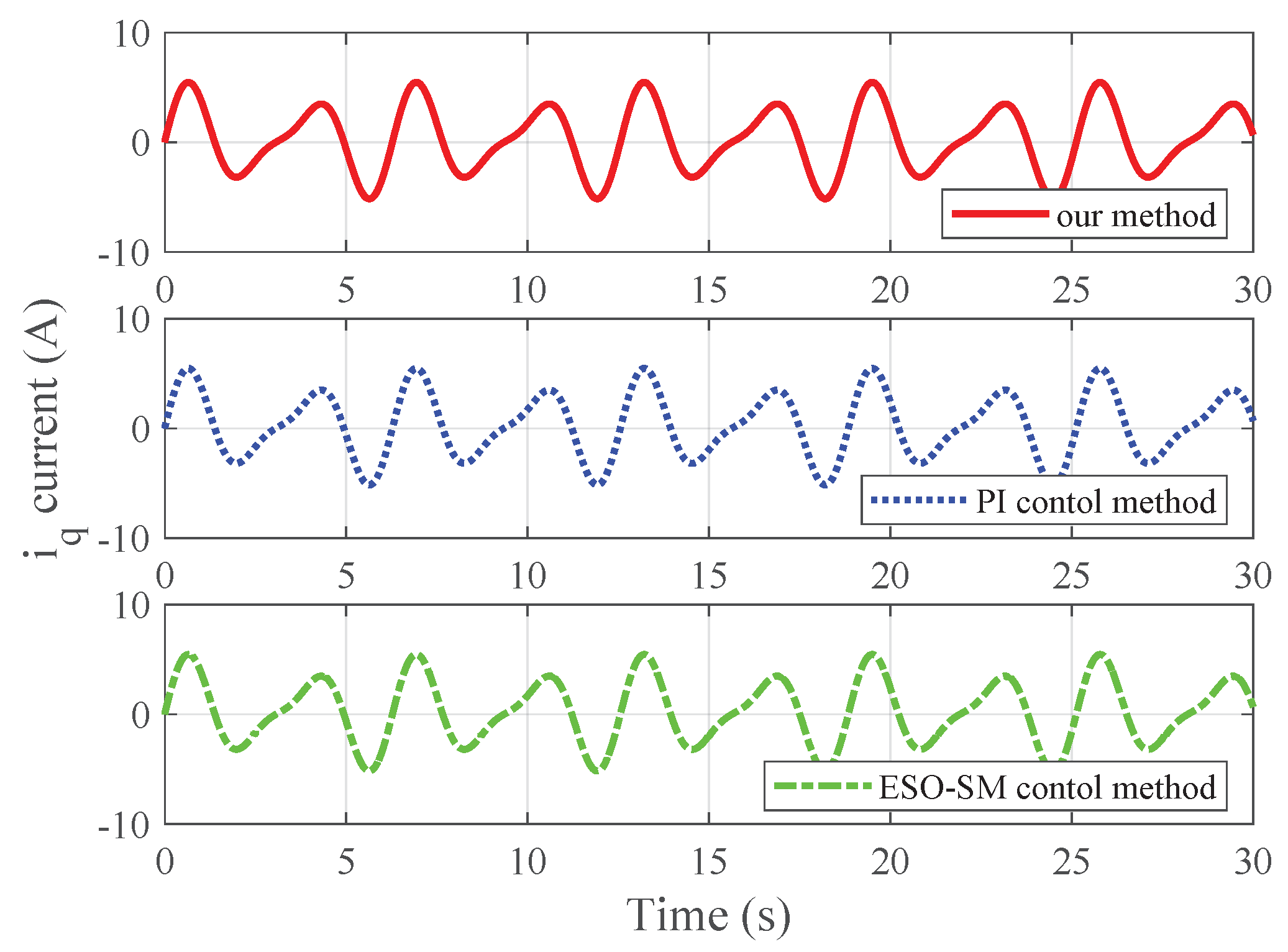
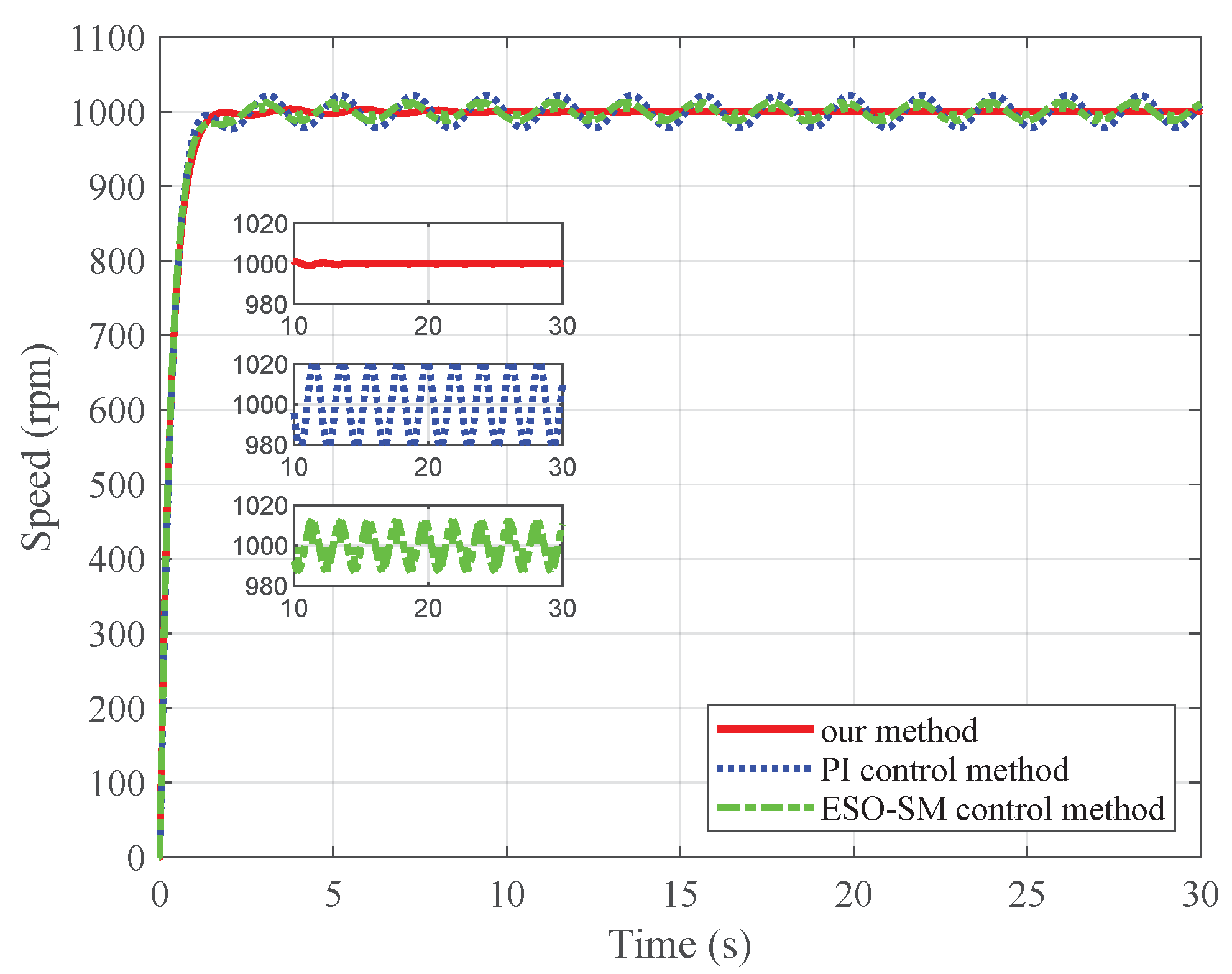
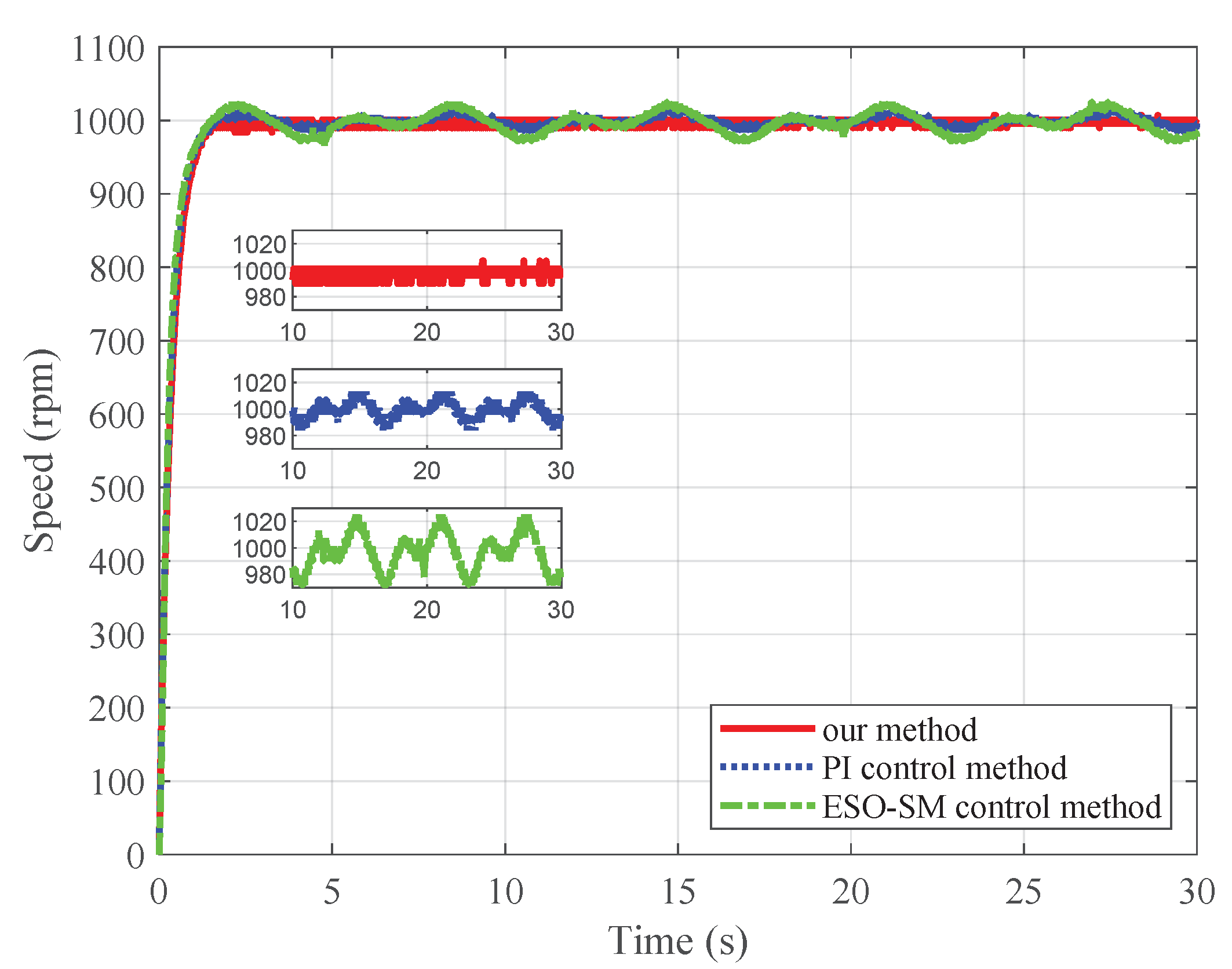
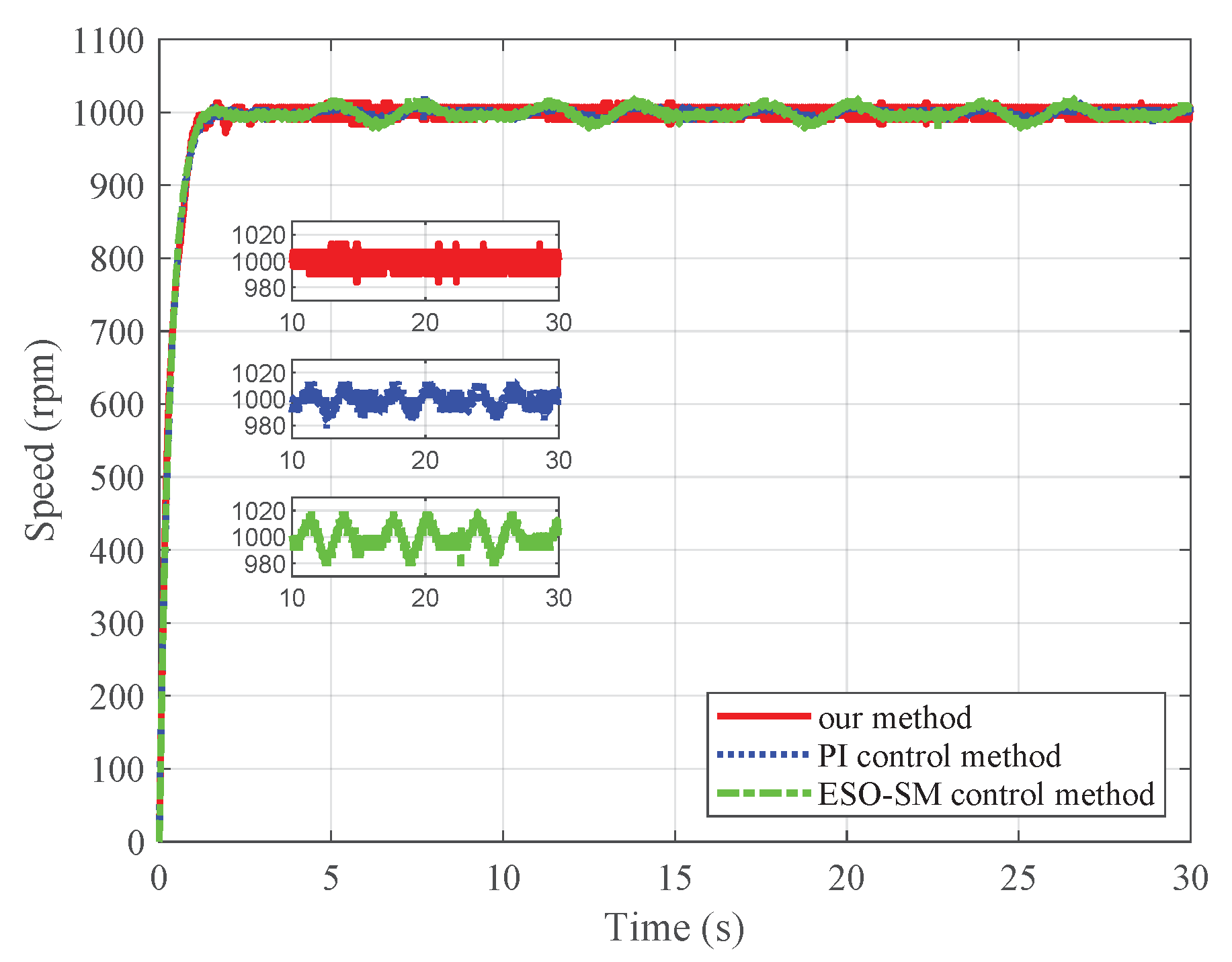
- Our work is the first experimental study on a PMSM speed servo system to verify whether the time-varying internal-model-based adaptive controller in [21] is effective in practice. Compared with the PI control method and the ESO-SM control method [9], our method has higher speed tracking accuracy under load torque disturbance with unknown time-varying frequencies.
2. Problem Formulation
3. Controller Design
- Design a stabilization controller to stabilize the augmented system and an adaptive law to handle the unknown parameters in the exosystem.
4. Simulation and Experimental Results
4.1. Simulation Results
4.2. Experimental Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Correction Statement
References
- Rafaq, M.S.; Jung, J.W. A comprehensive review of state-of-the-art parameter estimation techniques for permanent magnet synchronous motors in wide speed range. IEEE Trans. Ind. Inform. 2020, 16, 4747–4758. [Google Scholar]
- Teymoori, V.; Kamper, M.; Wang, R.J.; Kennel, R. Sensorless control of dual three-phase permanent magnet synchronous machines—A review. Energies 2023, 16, 1326. [Google Scholar] [CrossRef]
- Kifayat, U.; Jaroslaw, G.; Adeel, F.M. Critical review on robust speed control techniques for permanent magnet synchronous motor (PMSM) speed regulation. Energies 2022, 15, 1235. [Google Scholar] [CrossRef]
- Zhao, J.G.; Yang, C.Y.; Gao, W.N.; Zhao, L.N. Reinforcement learning and optimal control of PMSM speed servo system. IEEE Trans. Ind. Electron. 2023, 70, 8305–8313. [Google Scholar]
- Chen, P.C.; Luo, Y. Analytical fractional-order PID controller design with Bode’s ideal cutoff filter for PMSM speed servo system. IEEE Trans. Ind. Electron. 2023, 70, 1783–1793. [Google Scholar]
- Nguyen, H.T.; Jung, J.W. Finite control set model predictive control to guarantee stability and robustness for surface-mounted PM synchronous motors. IEEE Trans. Ind. Electron. 2018, 65, 8510–8519. [Google Scholar]
- Yin, Y.F.; Liu, L.; Vazquez, S.; Xu, R.Q.; Dong, Z.J.; Liu, J.X.; Leon, J.I.; Wu, L.G.; Franquelo, L.G. Disturbance and uncertainty attenuation for speed regulation of PMSM servo system using adaptive optimal control strategy. IEEE Trans. Transp. Electrif. 2023, 9, 3410–3420. [Google Scholar]
- Yan, Y.D.; Yang, J.; Sun, Z.X.; Zhang, C.L.; Li, S.H.; Yu, H.Y. Robust speed regulation for PMSM servo system with multiple sources of disturbances via an augmented disturbance observer. IEEE/ASME Trans. Mechatron. 2018, 23, 769–780. [Google Scholar]
- Qu, L.Z.; Qiao, W.; Qu, L.Y. An extended-state-observer-based sliding-mode speed control for permanent-magnet synchronous motors. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 1605–1613. [Google Scholar]
- Khanh, P.Q.; Anh, H.P. Novel sensorless PMSM speed control using advanced fuzzy MRAS algorithm. Arab. J. Sci. Eng. 2022, 47, 14531–14542. [Google Scholar]
- Zhu, L.H.; Zhang, G.Q.; Jing, R.Z.; Bi, G.D.; Xiang, R.H.; Wang, G.L.; Xu, D.G. Nonlinear active disturbance rejection control strategy for permanent magnet synchronous motor drives. IEEE Trans. Energy Convers. 2022, 37, 2119–2129. [Google Scholar]
- Gao, Y.X.; Yin, Z.G.; Zhang, Y.P.; Zhang, Y.Q.; Yuan, D.S.; Liu, J. Surface-mounted permanent magnet synchronous motor servo system speed control using antidisturbance enhanced finite-time composite control. IEEE Trans. Power Electron. 2024, 39, 9996–10008. [Google Scholar]
- Isidori, A.; Marconi, L.; Serrani, A. Robust Autonomous Guidance: An Internal Model-Based Approach; Springer: London, UK, 2003. [Google Scholar]
- Huang, J. Nonlinear Output Regulation: Theory and Applications; SIAM: Philadelphia, PA, USA, 2004. [Google Scholar]
- Chen, Z.Y.; Huang, J. Stabilization and Regulation of Nonlinear Systems: A Robust and Adaptive Approach; Springer: Cham, Switzerland, 2015. [Google Scholar]
- Bin, M.; Astolfi, D.; Marconi, L. About robustness of control systems embedding an internal model. IEEE Trans. Autom. Control 2023, 68, 1306–1320. [Google Scholar]
- Lei, Y.; Hua, T.; Wang, Y.W.; Park, J.H. Robust output regulation of singularly perturbed systems by event-triggered output feedback. IEEE Trans. Syst. Man Cybern. Syst. 2024, 54, 2104–2113. [Google Scholar]
- Liu, L.; Chen, Z.Y.; Huang, J. Global disturbance rejection of lower triangular systems with an unknown linear exosystem. IEEE Trans. Autom. Control 2011, 56, 1690–1695. [Google Scholar]
- Tomei, P.; Marino, R. Adaptive regulation for minimum phase systems with unknown relative degree and uncertain exosystems. Automatica 2023, 147, 110678. [Google Scholar]
- Zhang, Z.; Serrani, A. Adaptive robust output regulation of uncertain linear periodic systems. IEEE Trans. Autom. Control 2009, 54, 266–278. [Google Scholar]
- Yang, X.; Huang, J. A framework for nonlinear output regulation for time-varying uncertain systems. In Proceedings of the 49th IEEE Conference on Decision and Control, Atlanta, GA, USA, 15–17 December 2010; pp. 5396–5401. [Google Scholar]
- Zhang, M.T.; Liu, Z.T.; Su, H.Y. Precise disturbance rejection for dynamic wireless charging system of electric vehicle using internal model-based regulator with disturbance observer. IEEE Trans. Ind. Electron. 2024, 71, 7695–7705. [Google Scholar]
- Wu, H.W.; Xu, D.B. Attitude regulation of flexible spacecrafts with unknown control directions and input disturbances. J. Syst. Sci. Complex. 2024, 37, 2347–2367. [Google Scholar]
- Ping, Z.W.; Li, Y.Y.; Song, Y.; Huang, Y.Z.; Wang, H.; Lu, J.-G. Nonlinear speed tracking control of PMSM servo system: A global robust output regulation approach. Control Eng. Pract. 2021, 112, 104832. [Google Scholar]
- Ping, Z.W.; Jia, Y.J.; Xiong, B.G.; Zhang, H.W.; Lu, J.-G. Optimal output regulation for PMSM speed servo system using approximate dynamic programming. Sci. China-Inf. Sci. 2023, 66, 170206. [Google Scholar] [CrossRef]
- Zhang, L.; Chen, Z.Y.; Yu, X.H.; Yang, J.; Li, S.H. Sliding-mode-based robust output regulation and its application in PMSM servo systems. IEEE Trans. Ind. Electron. 2023, 70, 1852–1860. [Google Scholar] [CrossRef]
- Zhu, G.C.; Dessaint, L.A.; Akhrif, O.; Kaddouri, A. Speed tracking control of a permanent-magnet synchronous motor with state and load torque observer. IEEE Trans. Ind. Electron. 2000, 47, 346–355. [Google Scholar]
- Huang, J.; Chen, Z.Y. A general framework for tackling output regulation problem. IEEE Trans. Autom. Control 2004, 49, 2203–2218. [Google Scholar] [CrossRef]
- Liu, T.F.; Jiang, Z.-P. Event-based control of nonlinear systems with partial state and output feedback. Automatica 2015, 53, 10–22. [Google Scholar]
- Liu, T.F.; Qin, Z.Y.; Hong, Y.G.; Jiang, Z.-P. Distributed optimization of nonlinear multiagent systems: A small-gain approach. IEEE Trans. Autom. Control 2022, 67, 676–691. [Google Scholar]
- Jin, Z.H.; Li, H.; Qin, Z.Y.; Wang, Z.X. Gradient-free cooperative source-seeking of quadrotor under disturbances and communication constraints. IEEE Trans. Ind. Electron. 2025, 72, 1969–1979. [Google Scholar]
- Han, J.Q.; Wang, W. Nonlinear tracking differentiator. J. Syst. Sci. Math. Sci. 1994, 14, 177–183. [Google Scholar]
- Morteza, M.; Arman, K.; Mojtaba, G.; Payam, S.; Sami, A. A Discrete approach to feedback linearization, yaw control of an unmanned helicopter. Unmanned Syst. 2023, 11, 57–66. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Control Methods | MSSSE (rpm) | Overshoot (%) | Settling Time (s) | |
|---|---|---|---|---|
| Case 1 | our controller | 0.4 | 0 | 1.035 |
| PI controller | 21 | 0 | 0.912 | |
| ESO-SM controller | 15 | 0 | 0.926 | |
| Case 2 | our controller | 0.6 | 0 | 1.023 |
| PI controller | 25 | 0 | 0.885 | |
| ESO-SM controller | 17 | 0 | 0.934 |
| Control Methods | MSSSE (rpm) | Overshoot (%) | Settling Time (s) | |
|---|---|---|---|---|
| Case 1 | our controller | 5 | 0 | 1.113 |
| PI controller | 22 | 0.6 | 0.928 | |
| ESO-SM controller | 14 | 1.8 | 0.965 | |
| Case 2 | our controller | 7 | 0 | 1.132 |
| PI controller | 25 | 0.8 | 0.954 | |
| ESO-SM controller | 15 | 1.2 | 0.973 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, H.; Ping, Z.; Hui, J.; Huang, Y.; Lu, J.-G. Adaptive Output Regulation for PMSM Speed Servo System via Time-Varying Internal Model Approach. Actuators 2025, 14, 158. https://doi.org/10.3390/act14030158
Song H, Ping Z, Hui J, Huang Y, Lu J-G. Adaptive Output Regulation for PMSM Speed Servo System via Time-Varying Internal Model Approach. Actuators. 2025; 14(3):158. https://doi.org/10.3390/act14030158
Chicago/Turabian StyleSong, Hui, Zhaowu Ping, Jiaze Hui, Yunzhi Huang, and Jun-Guo Lu. 2025. "Adaptive Output Regulation for PMSM Speed Servo System via Time-Varying Internal Model Approach" Actuators 14, no. 3: 158. https://doi.org/10.3390/act14030158
APA StyleSong, H., Ping, Z., Hui, J., Huang, Y., & Lu, J.-G. (2025). Adaptive Output Regulation for PMSM Speed Servo System via Time-Varying Internal Model Approach. Actuators, 14(3), 158. https://doi.org/10.3390/act14030158