
Prescribed-Time-Based Anti-Disturbance Tracking Control of Manipulators Under Multiple Constraints


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- A multilevel control architecture integrating prescribed-time convergence control, output constraint control, and PPC is constructed to achieve the high-precision trajectory tracking of manipulators. The control architecture addresses the nonlinear and complex dynamic characteristics of the system, ensuring that the control objective is achieved within a given time. This effectively improves the dynamic response performance of the system.
- An ESO is introduced to enhance the anti-disturbance capabilities, which realizes the dynamic suppression of external disturbances by observing and compensating for unknown disturbances in the system in real time. This design significantly improves the robustness of the system, enabling the control algorithm to maintain stable and highly accurate trajectory tracking under complex environments.
- An innovative output constraint and performance presetting mechanism is designed to finely constrain the output, preventing it from exceeding the predetermined range without affecting the stability of the system. This mechanism ensures the safety and accuracy of the outputs during the control process, enabling the system to achieve the desired tracking accuracy during complex task execution.
2. Problem Formulation and Preliminaries
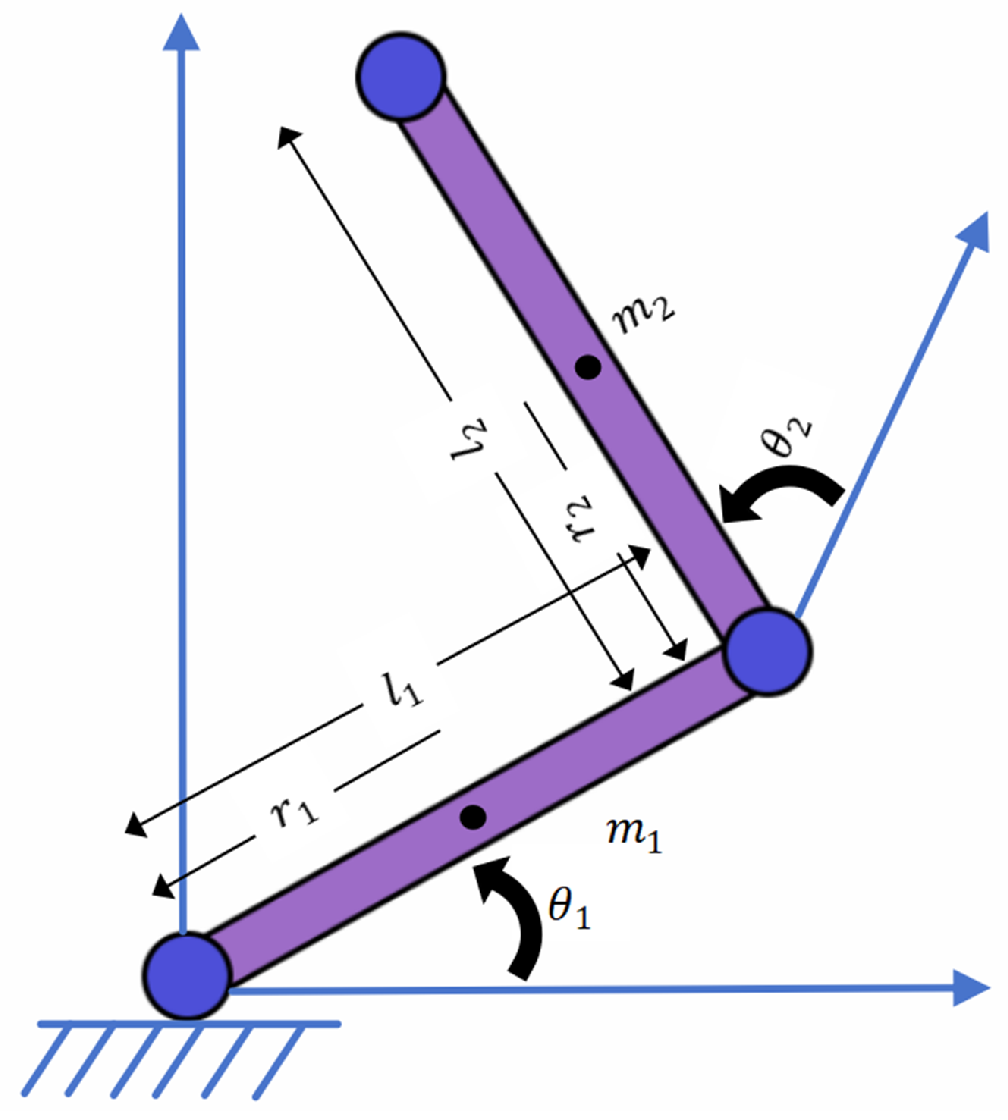
2.1. Manipulator Mathematical Model
2.2. Prescribed-Time Control
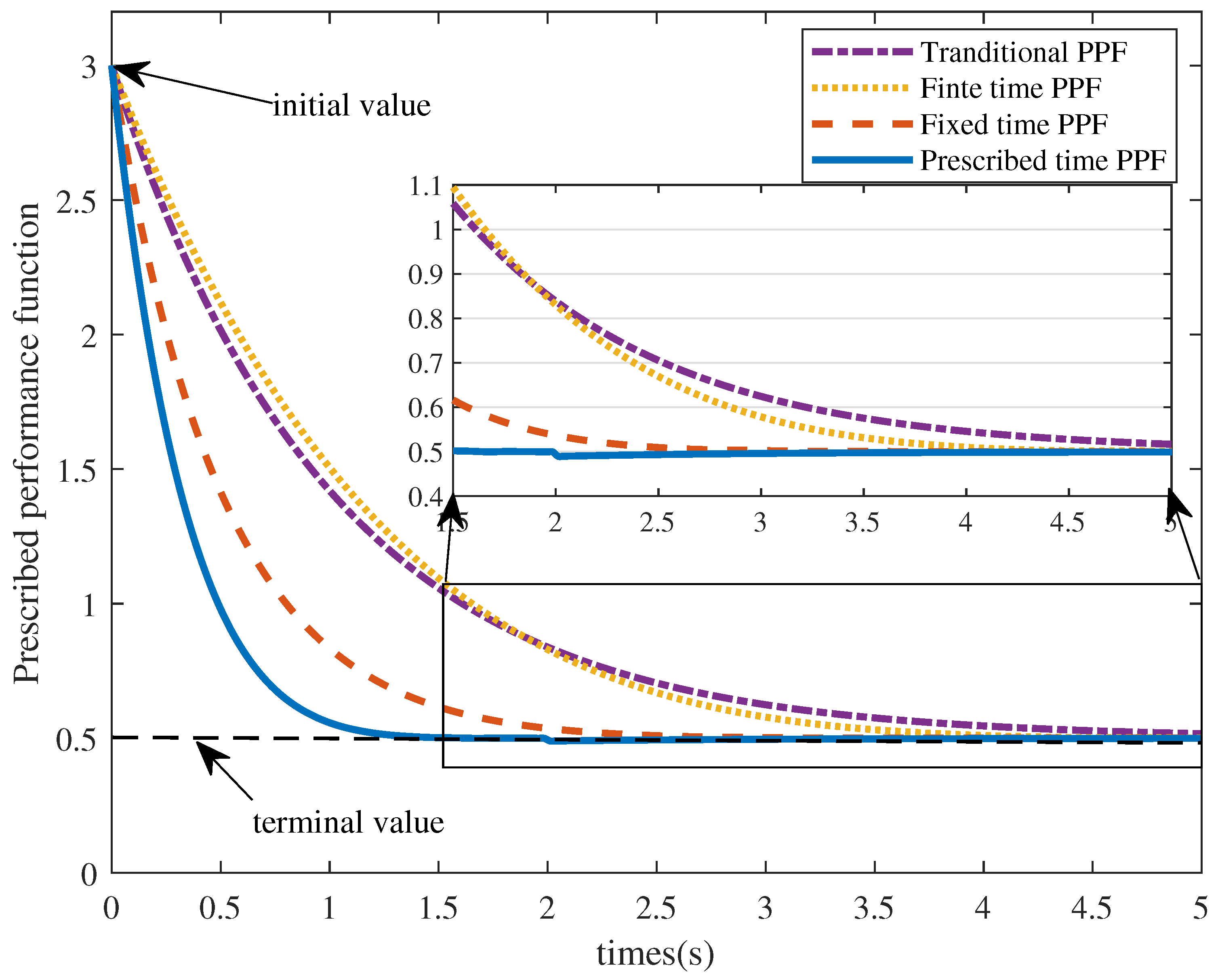
2.3. Prescribed-Time Prescribed Performance Control (PTPPC)
2.4. Prescribed-Time ESO (PTESO)
3. Main Results
3.1. Control Design
3.2. Stability Analysis
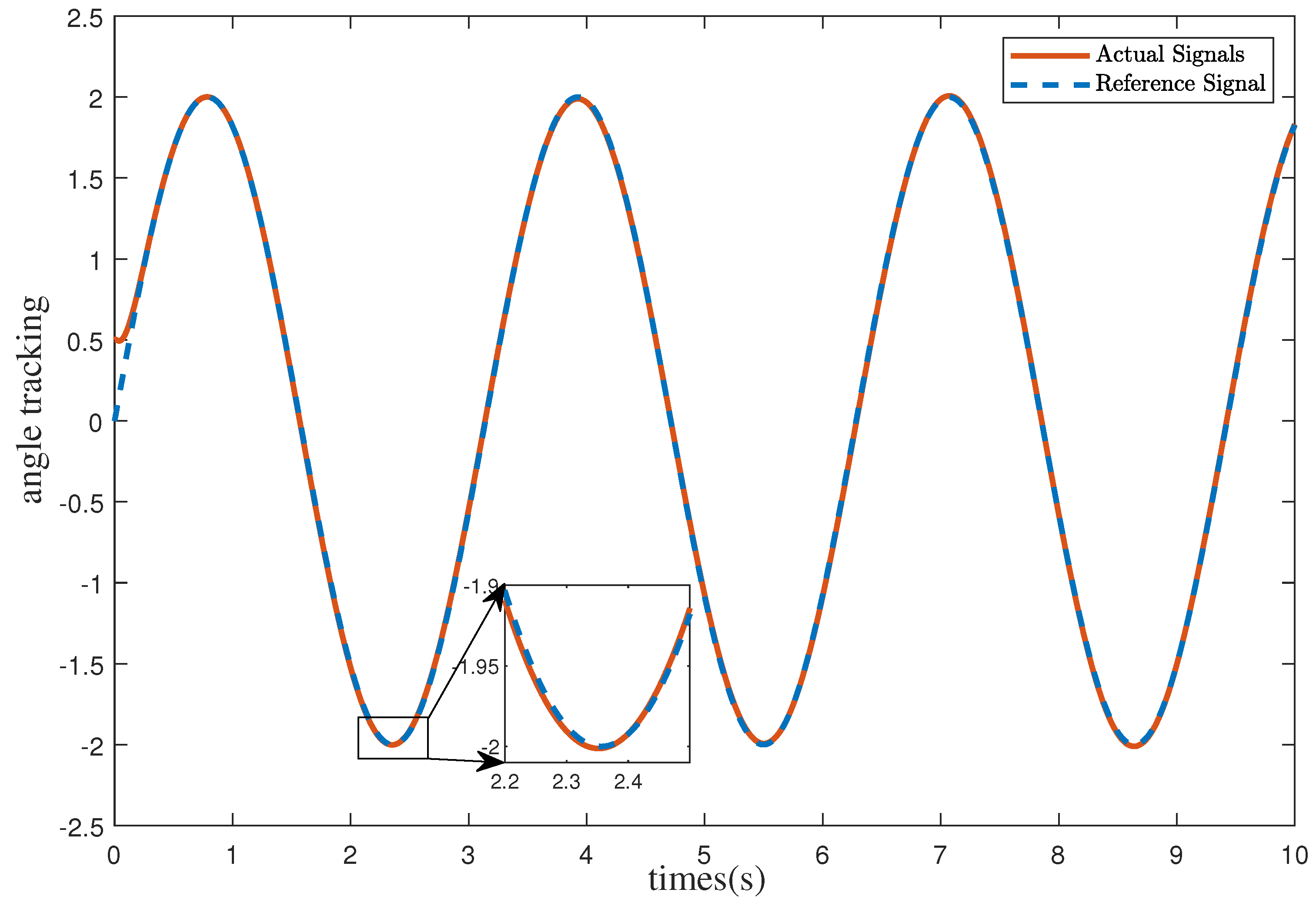
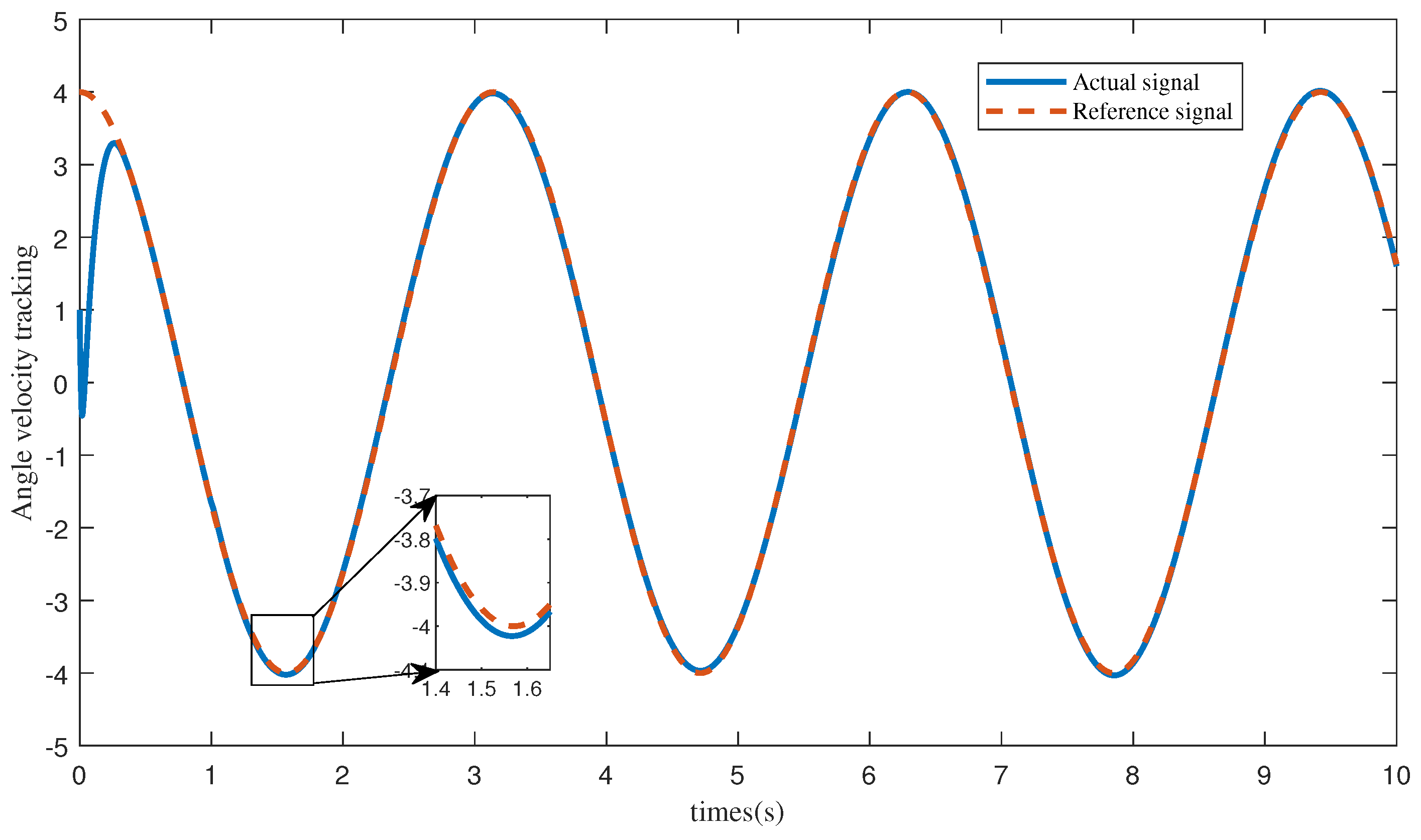
4. Numerical Simulation
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhang, C.; Guan, M.; Zhang, G. Signal generator based prescribed-time anti-disturbance containment control for multi-agent systems with an application to multiple manipulator system. In Proceedings of the 2024 International Conference on Advanced Control Systems and Automation Technologies (ACSAT), Nanjing, China, 15–17 November 2024. [Google Scholar]
- Wang, W.; Chi, H.; Zhao, S.; Du, Z. A control method for hydraulic manipulators in automatic emulsion filling. Autom. Constr. 2018, 91, 92–99. [Google Scholar] [CrossRef]
- Nurmi, J.; Mattila, J. Global energy-optimal redundancy resolution of hydraulic manipulators: Experimental results for a forestry manipulator. Energies 2017, 10, 647. [Google Scholar] [CrossRef]
- Mattila, J.; Koivumäki, J.; Caldwell, D.G.; Semini, C. A survey on control of hydraulic robotic manipulators with projection to future trends. IEEE/ASME Trans. Mechatron. 2017, 22, 669–680. [Google Scholar]
- Siwek, M.; Baranowski, L.; Ładyżyńska-Kozdraś, E. The Application and Optimisation of a Neural Network PID Controller for Trajectory Tracking Using UAVs. Sensors 2024, 24, 8072. [Google Scholar] [CrossRef]
- Melo, A.G.; Andrade, F.A.; Guedes, I.P.; Carvalho, G.F.; Zachi, A.R.; Pinto, M.F. Fuzzy gain-scheduling PID for UAV position and altitude controllers. Sensors 2022, 22, 2173. [Google Scholar] [CrossRef]
- Song, Y.; Wang, Y.; Holloway, J.; Krstic, M. Time-varying feedback for regulation of normal-form nonlinear systems in prescribed finite time. Automatica 2017, 83, 243–251. [Google Scholar] [CrossRef]
- Hua, C.; Ning, P.; Li, K. Adaptive prescribed-time control for a class of uncertain nonlinear systems. IEEE Trans. Autom. Control 2021, 67, 6159–6166. [Google Scholar]
- Wang, Y.; Song, Y.; Hill, D.J.; Krstic, M. Prescribed-time consensus and containment control of networked multiagent systems. IEEE Trans. Cybern. 2018, 49, 1138–1147. [Google Scholar]
- Siwek, M. Consensus-Based Formation Control with Time Synchronization for a Decentralized Group of Mobile Robots. Sensors 2024, 24, 3717. [Google Scholar] [CrossRef]
- Tee, K.P.; Ge, S.S.; Tay, E.H. Barrier Lyapunov functions for the control of output-constrained nonlinear systems. Automatica 2009, 45, 918–927. [Google Scholar]
- Xie, Z.; Chen, X.; Wu, X. Fixed time control of free-flying space robotic manipulator with full state constraints: A barrier-Lyapunov-function term free approach. Nonlinear Dyn. 2024, 112, 1883–1915. [Google Scholar] [CrossRef]
- Cruz-Ortiz, D.; Chairez, I.; Poznyak, A. Non-singular terminal sliding-mode control for a manipulator robot using a barrier Lyapunov function. ISA Trans. 2022, 121, 268–283. [Google Scholar] [CrossRef] [PubMed]
- Bechlioulis, C.P.; Rovithakis, G.A. Robust adaptive control of feedback linearizable MIMO nonlinear systems with prescribed performance. IEEE Trans. Autom. Control 2008, 53, 2090–2099. [Google Scholar] [CrossRef]
- Deng, W.; Zhou, H.; Zhou, J.; Yao, J. Neural network-based adaptive asymptotic prescribed performance tracking control of hydraulic manipulators. IEEE Trans. Syst. Man Cybern. Syst. 2022, 53, 285–295. [Google Scholar] [CrossRef]
- Guo, Q.; Zhang, Y.; Celler, B.G.; Su, S.W. Neural adaptive backstepping control of a robotic manipulator with prescribed performance constraint. IEEE Trans. Neural Netw. Learn. Syst. 2018, 30, 3572–3583. [Google Scholar] [CrossRef]
- Han, J. From PID to Active Disturbance Rejection Control. IEEE Trans. Ind. Electron. 2009, 56, 900–906. [Google Scholar] [CrossRef]
- Zhang, X.; Shi, G. Dual extended state observer-based adaptive dynamic surface control for a hydraulic manipulator with actuator dynamics. Mech. Mach. Theory 2022, 169, 104647. [Google Scholar] [CrossRef]
- Zhang, C.; Zhang, G.; Han, W.; Lv, X.; Shi, Z. Distributed fixed-time control for high-order multi-agent systems with FTESO and feasibility constraints. J. Frankl. Inst. 2024, 361, 107219. [Google Scholar] [CrossRef]
- Song, Y.; Ye, H.; Lewis, F.L. Prescribed-time control and its latest developments. IEEE Trans. Syst. Man Cybern. Syst. 2023, 53, 4102–4116. [Google Scholar] [CrossRef]
- Gao, S.; Liu, X.; Dimirovski, G.M. Finite-time prescribed performance control for spacecraft attitude tracking. IEEE/ASME Trans. Mechatron. 2021, 27, 3087–3098. [Google Scholar] [CrossRef]
- Cui, L.; Jin, N. Prescribed-time ESO-based prescribed-time control and its application to partial IGC design. Nonlinear Dyn. 2021, 106, 491–508. [Google Scholar]
- Zhao, Z.; He, W.; Ge, S.S. Adaptive neural network control of a fully actuated marine surface vessel with multiple output constraints. IEEE Trans. Control Syst. Technol. 2013, 22, 1536–1543. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.; Zheng, H.; Zhang, G. Prescribed-Time-Based Anti-Disturbance Tracking Control of Manipulators Under Multiple Constraints. Actuators 2025, 14, 157. https://doi.org/10.3390/act14030157
Wang Z, Zheng H, Zhang G. Prescribed-Time-Based Anti-Disturbance Tracking Control of Manipulators Under Multiple Constraints. Actuators. 2025; 14(3):157. https://doi.org/10.3390/act14030157
Chicago/Turabian StyleWang, Zirui, Haoran Zheng, and Guangming Zhang. 2025. "Prescribed-Time-Based Anti-Disturbance Tracking Control of Manipulators Under Multiple Constraints" Actuators 14, no. 3: 157. https://doi.org/10.3390/act14030157
APA StyleWang, Z., Zheng, H., & Zhang, G. (2025). Prescribed-Time-Based Anti-Disturbance Tracking Control of Manipulators Under Multiple Constraints. Actuators, 14(3), 157. https://doi.org/10.3390/act14030157