
Command-Filtered Yaw Stability Control of Vehicles with State Constraints


Abstract
1. Introduction
- ①
- By constructing the controller based on the ABLF, the proposed approach ensures that the sideslip angle and yaw rate remain within reasonable bounds, effectively imposing both symmetric and asymmetric constraints on state variables, thereby enhancing the adaptability and flexibility of the control algorithm.
- ②
- The adoption of the second-order command-filtered method enables the computation of filtered virtual control signals and their derivatives through a command filter, avoiding the need for direct differentiation of virtual control inputs and effectively mitigating the potential issue of computational explosion in control law derivation.
- ③
- A filtering error compensation mechanism is incorporated to reduce errors introduced by the command filter, further improving control accuracy. The proposed control scheme guarantees that the state error of the closed-loop system ultimately converges to a compact set, thereby enhancing the robustness and precision of yaw stability control.
2. Coupled Dynamic Model of Intelligent Vehicles and Problem Formulation
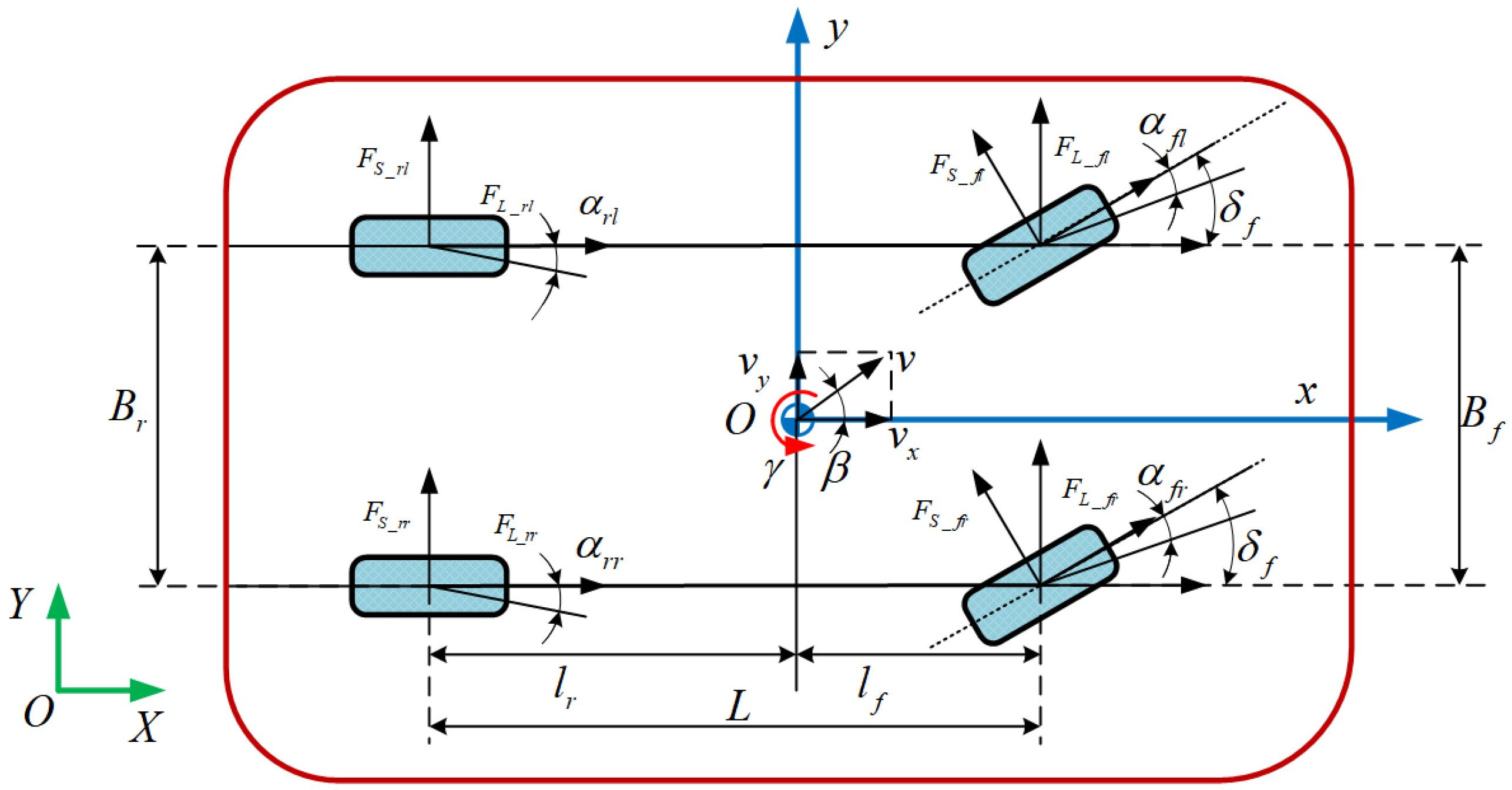
2.1. Coupled Dynamics Model of Intelligent Vehicles
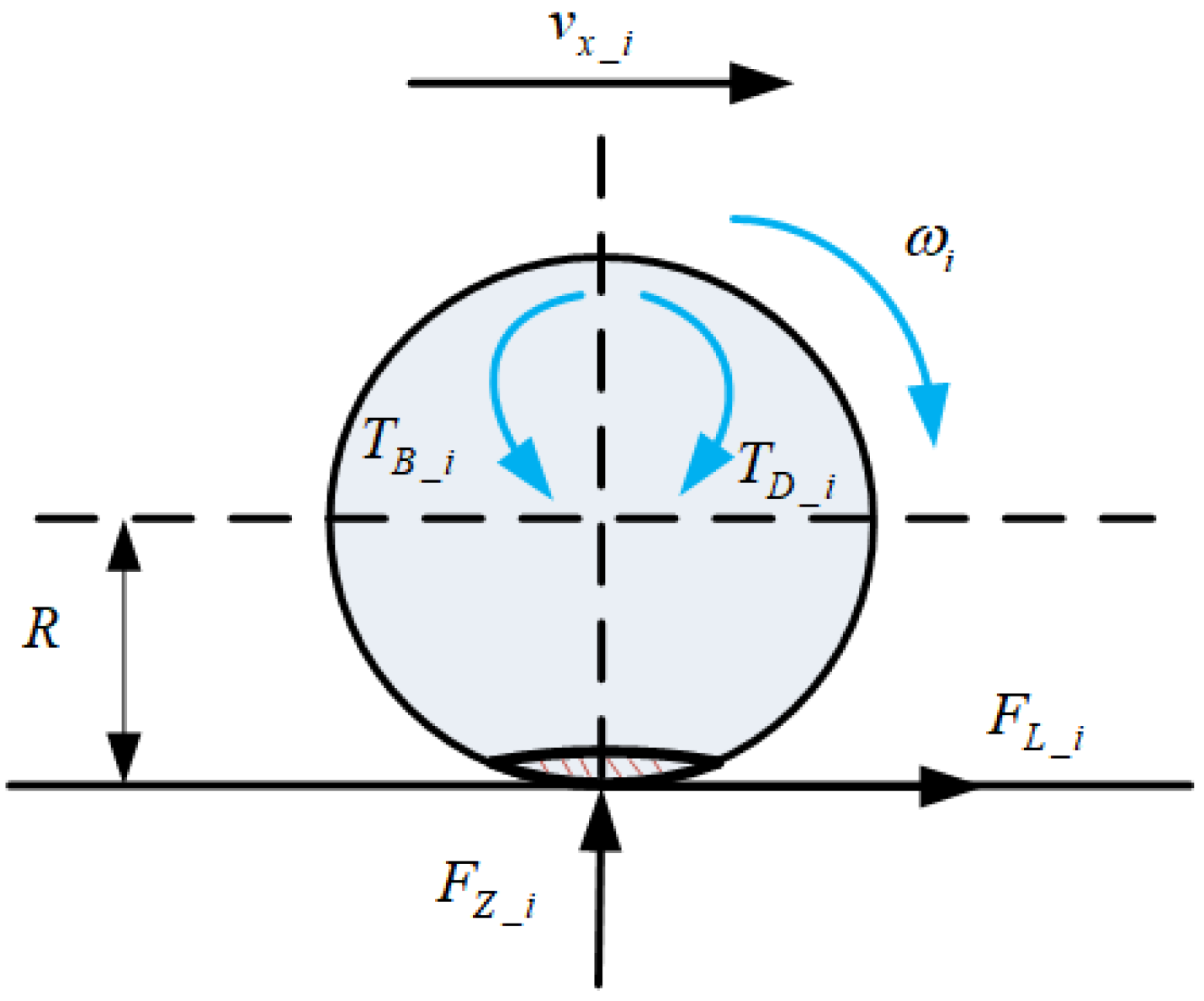
2.1.1. Rotational Dynamics Model of Each Wheel
2.1.2. Vertical Load of Each Wheel
2.1.3. Tire Slip Angles of Each Wheel
2.1.4. Longitudinal Velocities of Each Wheel
2.1.5. Tire Model
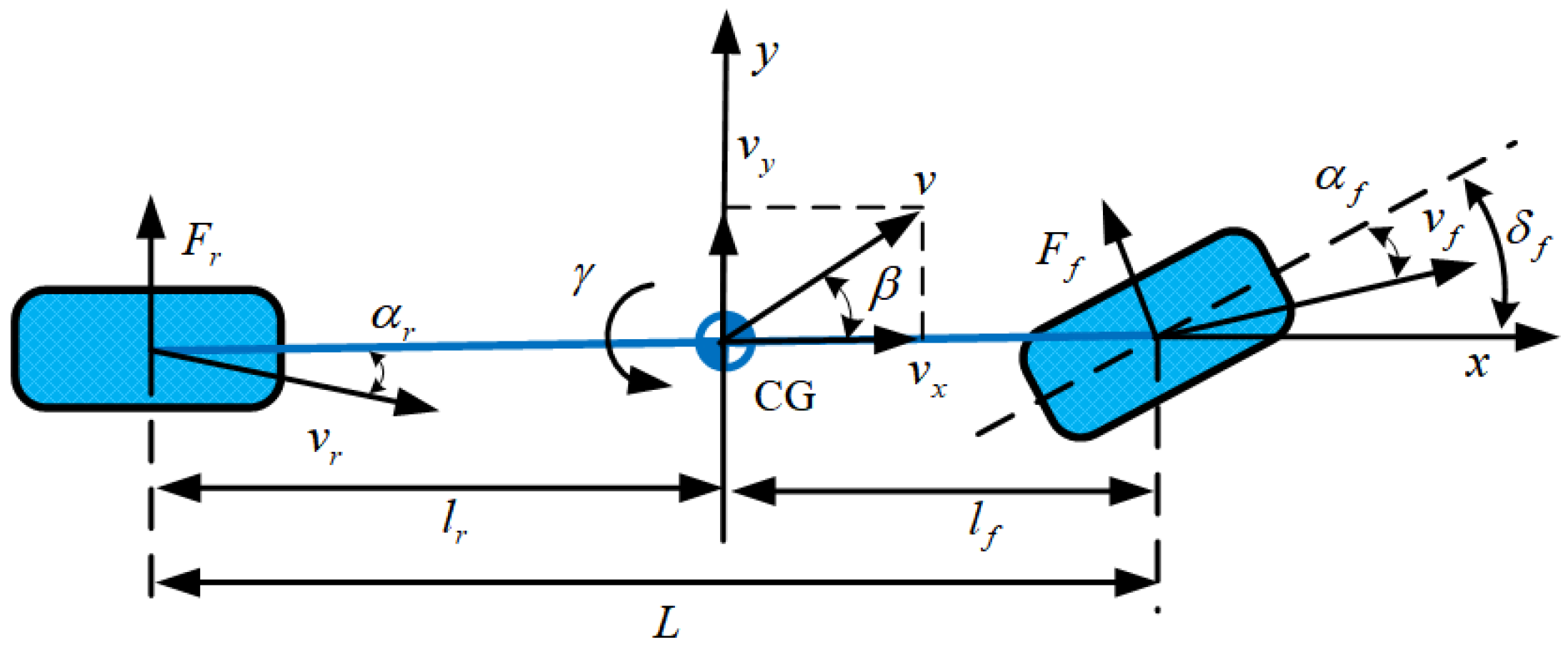
2.2. Model Simplification and Problem Description
Simplification of Coupled Dynamics Model for Intelligent Vehicles
- ①
- when or ,
- ②
3. Design and Stability Analysis of a State-Constrained Command-Filtered Controller for Vehicle Yaw Stability
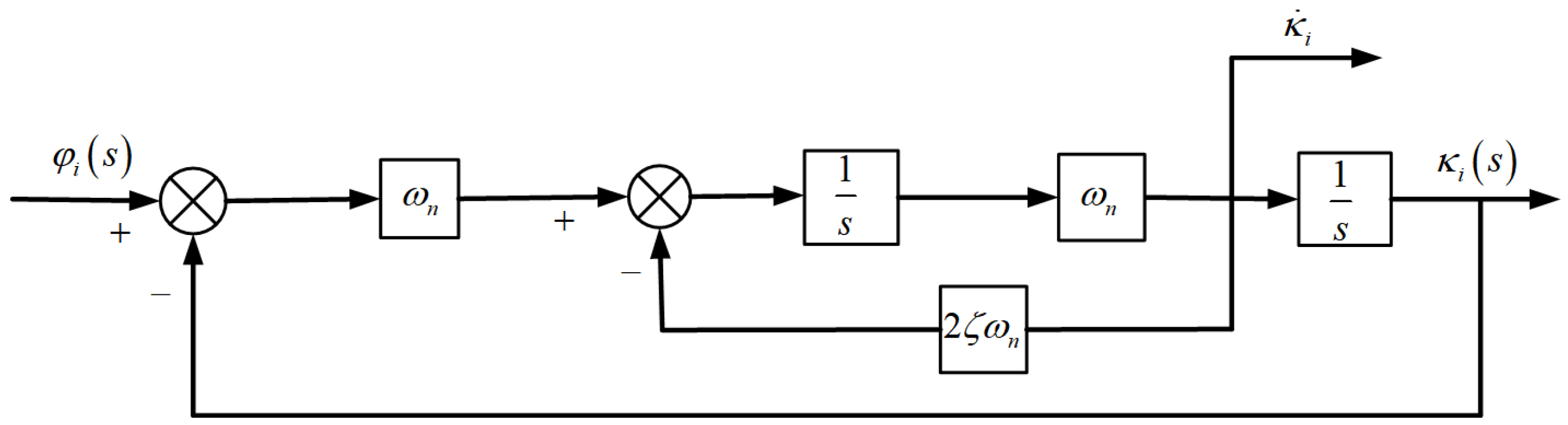
3.1. Controller Design
3.2. Stability Analysis
4. Distribution of Additional Lateral Yaw Moment in the Lower Layer
5. Simulation Verification and Result Analysis
5.1. Yaw Stability Control Process of Intelligent Vehicles
5.2. Parameter Settings
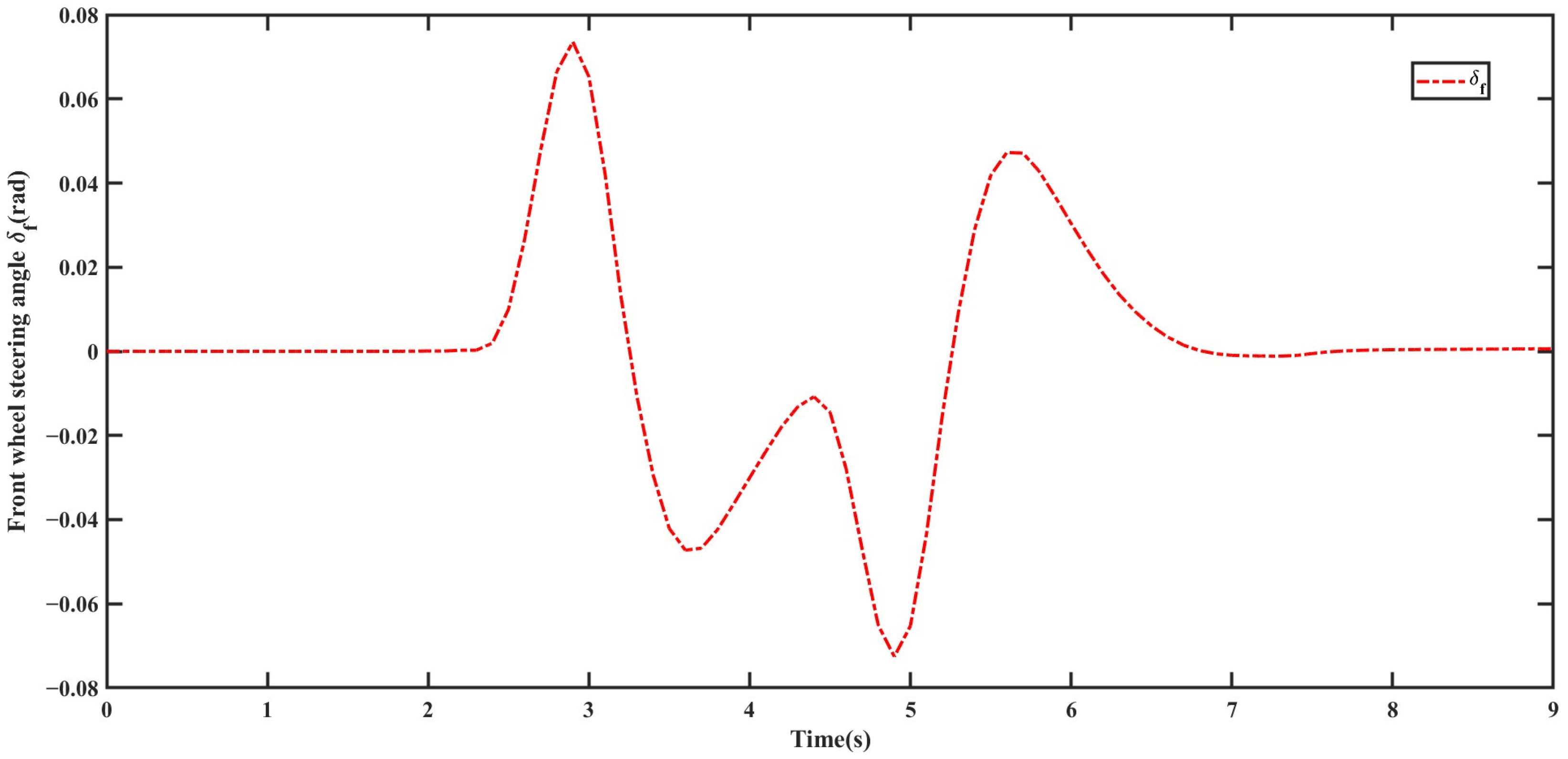
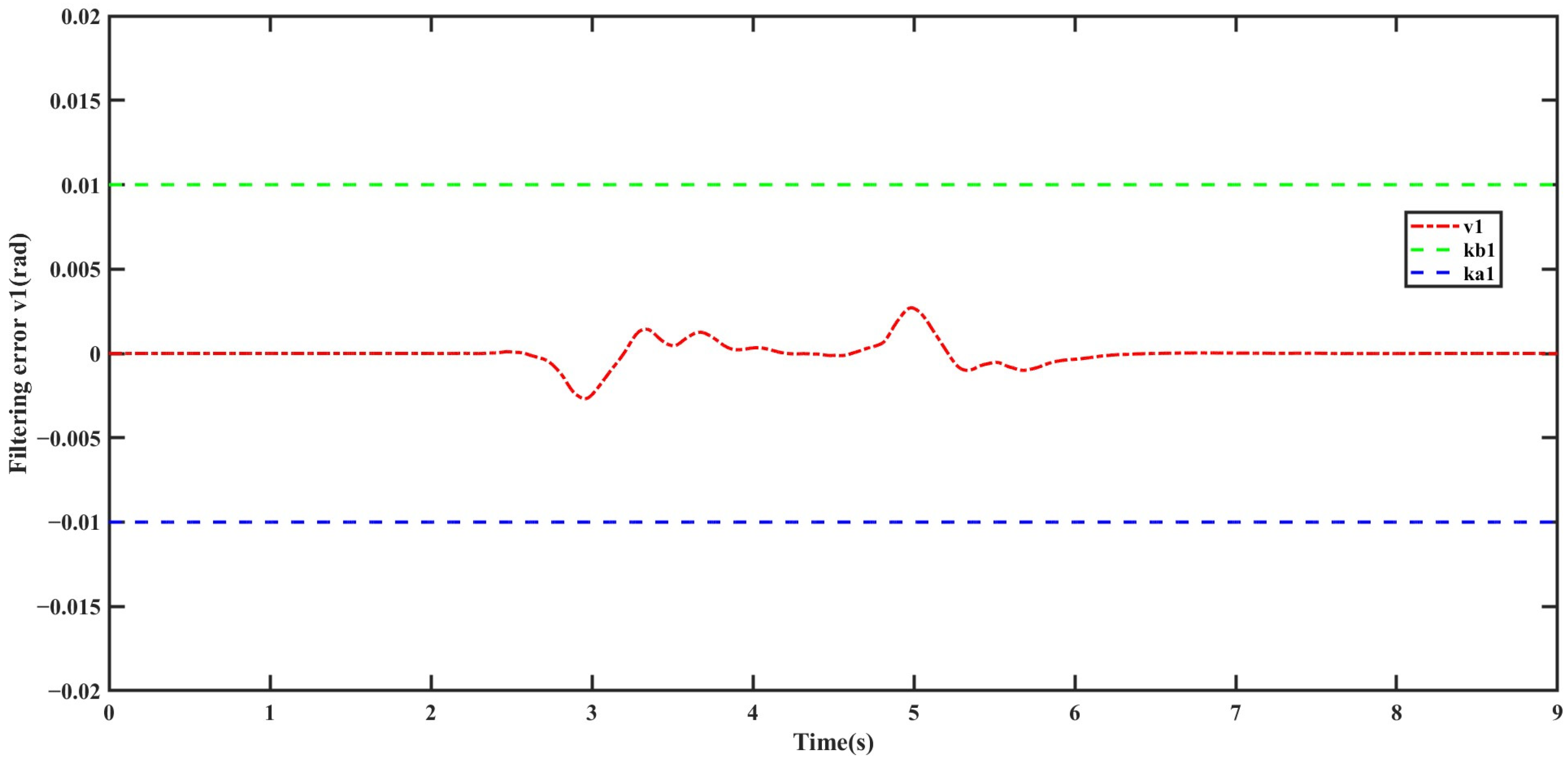
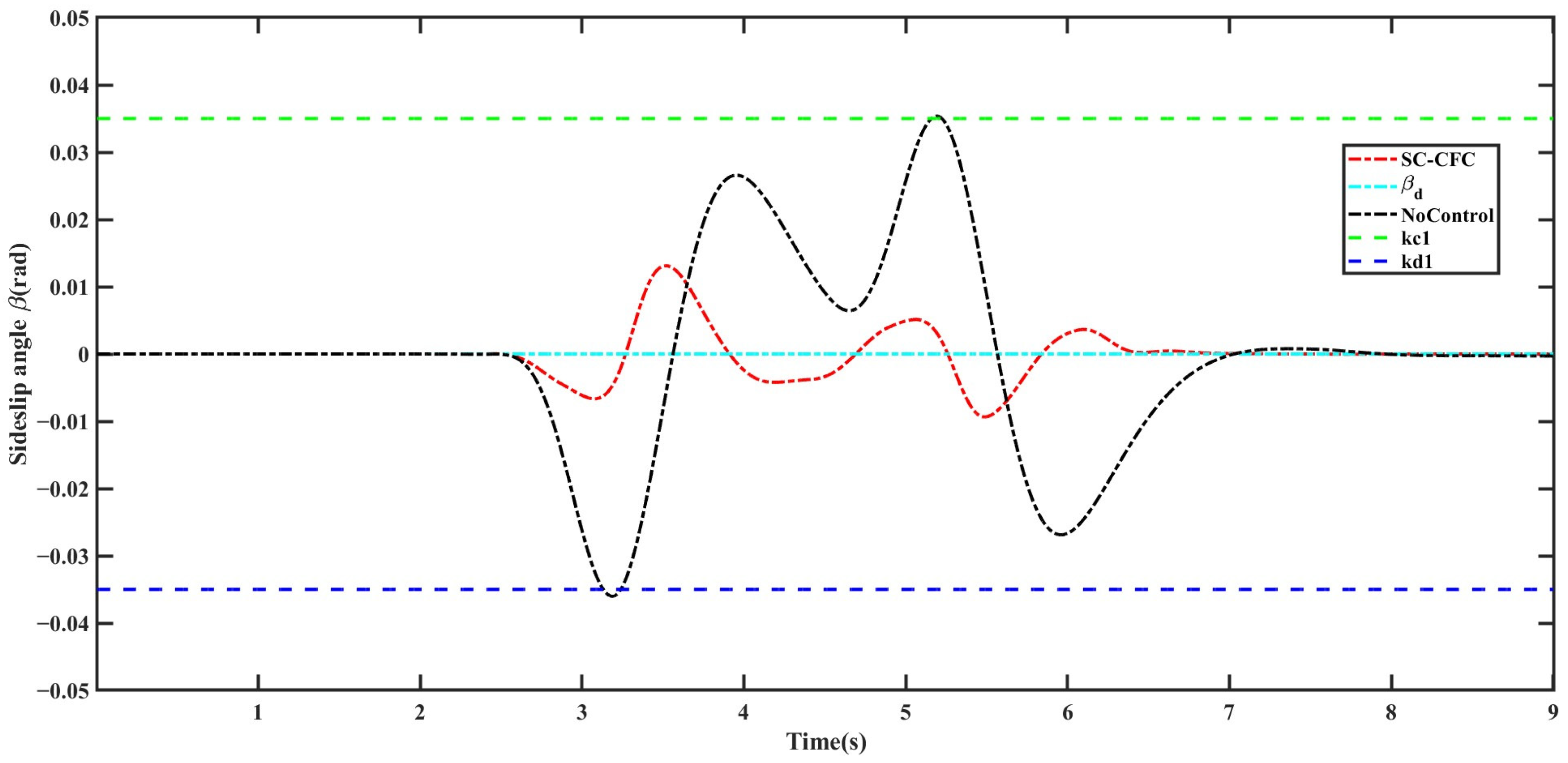
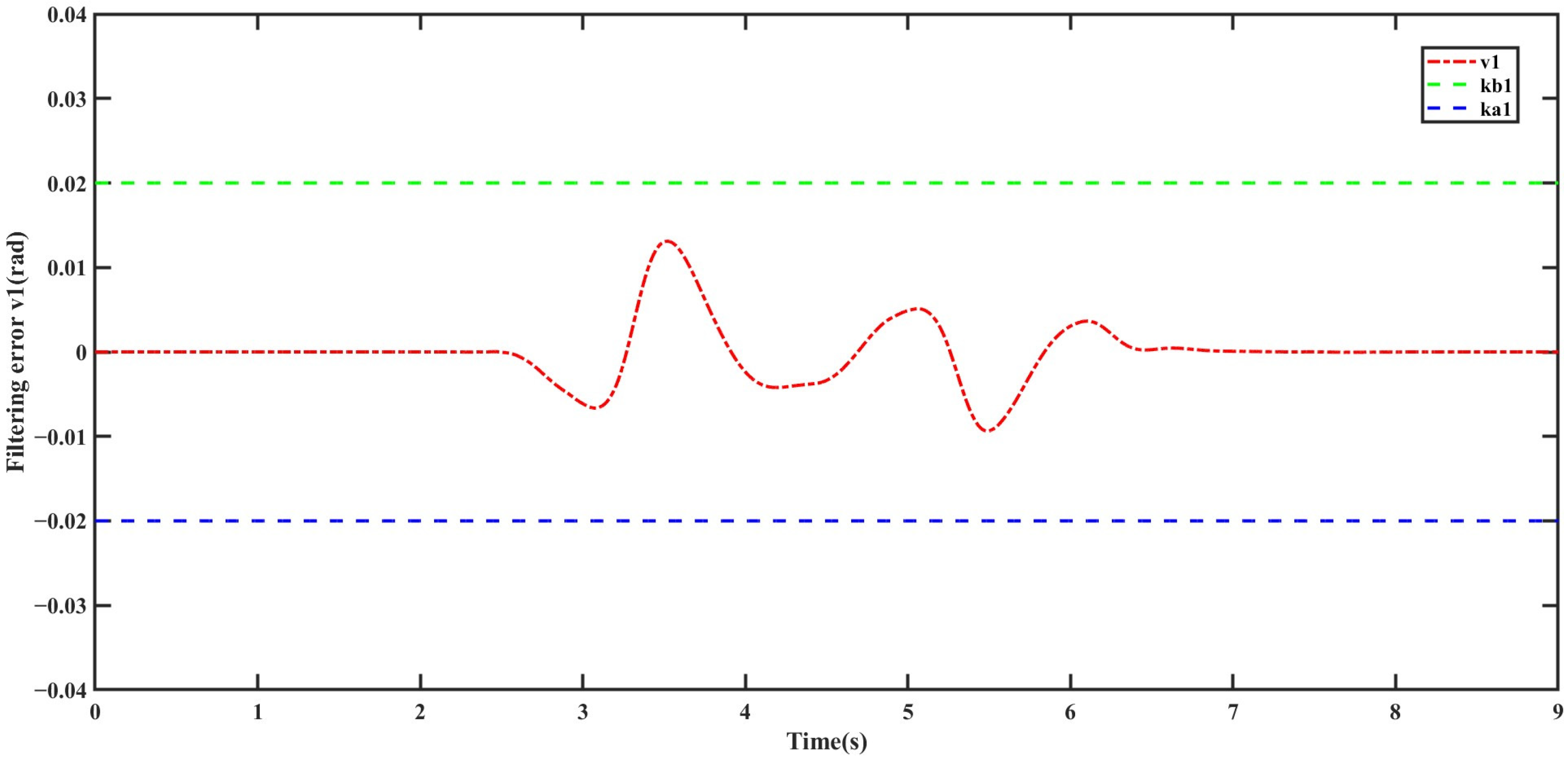
5.3. Result Analysis
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Liu, J.; Liu, J. Intelligent and Connected Vehicles: Current Situation, Future Directions, and Challenges. IEEE Commun. Mag. 2018, 2, 59–65. [Google Scholar] [CrossRef]
- Cao, X.; Huang, K.; Lian, Y.; Tian, Y. Direct Yaw Moment Control of Electric Vehicle for Improving the Vehicle Lateral Stability. In Proceedings of the 2018 IEEE International Conference on Mechatronics and Automation (ICMA), Changchun, China, 5–8 August 2018. [Google Scholar]
- Pi, D.; Chen, N.; Zhang, B.; Zhong, G. Enhancements in vehicle stability with yaw moment control via differential braking. In Proceedings of the 2009 IEEE International Conference on Vehicular Electronics and Safety (ICVES), Pune, India, 11–12 November 2009. [Google Scholar]
- Wang, B.; Zhang, J.; Zhang, Y.; Wang, W. The direct yaw-moment control based on adaptive fuzzy LQR for distributed drive electric vehicles. Adv. Mech. Eng. 2024, 16, 16878132241273524. [Google Scholar] [CrossRef]
- Kong, X.; Deng, Z.; Zhao, Y.; Gao, W. Stability control of distributed drive electric vehicle based on adaptive fuzzy sliding mode. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2024, 238, 2741–2752. [Google Scholar] [CrossRef]
- Sun, C.; Xu, Z.; Deng, S.; Tong, B. Integration sliding mode control for vehicle yaw and rollover stability based on nonlinear observation. Trans. Inst. Meas. Control 2022, 44, 3039–3056. [Google Scholar] [CrossRef]
- Ding, S.; Liu, L.; Zheng, W. Sliding Mode Direct Yaw-Moment Control Design for In-Wheel Electric Vehicles. IEEE Trans. Ind. Electron. 2017, 64, 6752–6762. [Google Scholar] [CrossRef]
- Liu, C.; Liu, H.; Han, L.; Wang, W.; Guo, C. Multi-Level Coordinated Yaw Stability Control Based on Sliding Mode Predictive Control for Distributed Drive Electric Vehicles Under Extreme Conditions. IEEE Trans. Veh. 2022, 72, 280–296. [Google Scholar] [CrossRef]
- Li, J.; Luo, J.; Feng, B.; Zhang, L.; Gao, M. Vehicle stability control based on vehicle motion state and tire force estimation. Trans. Can. Soc. Mech. Eng. 2024. [Google Scholar] [CrossRef]
- Liang, J.; Feng, J.; Lu, Y.; Yin, G.; Zhuang, W.; Mao, X. A Direct Yaw Moment Control Framework Through Robust T-S Fuzzy Approach Considering Vehicle Stability Margin. IEEE/ASME Trans. Mechatron. 2023, 29, 166–178. [Google Scholar] [CrossRef]
- Zhang, J.; Sun, W.; Feng, Z. Vehicle yaw stability control via H∞ gain scheduling. Mech. Syst. Signal Process. 2018, 106, 62–75. [Google Scholar] [CrossRef]
- Chen, J.; Liu, Y.; Liu, R.; Xiao, F.; Huang, J. Integrated control of braking-yaw-roll stability under steering-braking conditions. Sci. Rep. 2023, 13, 21110. [Google Scholar] [CrossRef]
- Jin, L.; Zhou, H.; Xie, X.; Guo, B.; Ma, X. A direct yaw moment control frame through model predictive control considering vehicle trajectory tracking performance and handling stability for autonomous driving. Control Eng. Pract. 2024, 148, 105947. [Google Scholar] [CrossRef]
- Guo, N.; Lenzo, B.; Zhang, X.; Zou, Y.; Zhai, R.; Zhang, T. A Real-Time Nonlinear Model Predictive Controller for Yaw Motion Optimization of Distributed Drive Electric Vehicles. IEEE Trans. Veh. Technol. 2020, 69, 4935–4946. [Google Scholar] [CrossRef]
- Ileš, Š.; Švec, M.; Makarun, P.; Hromatko, J. Predictive direct yaw moment control with active steering based on polytopic linear parameter-varying model. In Proceedings of the 2022 8th International Conference on Control, Decision and Information Technologies (CoDIT), Istanbul, Turkey, 17–20 May 2022. [Google Scholar]
- Rini, G.; Mazzilli, V.; Bottiglione, F.; Gruber, P.; Dhaens, M.; Sorniotti, A. On Nonlinear Model Predictive Vehicle Dynamics Control for Multi-Actuated Car-Semitrailer Configurations. IEEE Access 2024, 12, 165928–165947. [Google Scholar] [CrossRef]
- Alyoussef, F.; Kaya, I. A review on nonlinear control approaches: Sliding mode control backsteping control and feedback linearization control. In Proceedings of the International Engineering and Natural Sciences Conference (IENSC 2019), Diyarbakir, Turkey, 6–8 November 2019. [Google Scholar]
- Pang, H.; Yao, R.; Wang, P.; Xu, Z. Adaptive backsteping robust tracking control for stabilizing lateral dynamics of electric vehicles with uncertain parameters and external disturbances. Control Eng. Pract. 2021, 110, 104781. [Google Scholar] [CrossRef]
- Park, G. Sideslip angle control of electronic-four-wheel drive vehicle using backsteping controller. Int. J. Automot. Technol. 2022, 23, 729–739. [Google Scholar] [CrossRef]
- He, Y.; King, E.; Cai, Y.; Yuan, C. Design and analysis of robust state constraint control for direct yaw moment control system. Int. J. Model. Simul. 2022, 42, 551–560. [Google Scholar] [CrossRef]
- Tee, K.; Ge, S.; Tay, E.H. Barrier Lyapunov functions for the control of output-constrained nonlinear systems. Automatica 2009, 45, 918–927. [Google Scholar] [CrossRef]
- Farrel, J.; Polycarpou, M.; Sharma, M.; Dong, W. Command filtered backstepping. IEEE Trans. Autom. Control 2009, 54, 1391–1395. [Google Scholar] [CrossRef]
- Liu, W.; Zhao, H.; Shen, H.; Xu, S.; Park, J. Command-filter Based Predefined-time Control for State-constrained Nonlinear Systems Subject to Preassigned Performance Metrics. IEEE Trans. Autom. 2024, 69, 7801–7807. [Google Scholar] [CrossRef]
- Hao, R.; Wang, H.; Zheng, W. Time-varying state constrained estimators-based command filtered quantized consensus control for nonlinear multiagent systems. Int. J. Robust Nonlinear Control 2023, 33, 11306–11334. [Google Scholar] [CrossRef]
- Zhang, T.; Feng, C. Command filter-based adaptive event-triggered control for switched nonlinear systems with full state constraints. Int. J. Robust Nonlinear Control 2024, 34, 3873–3890. [Google Scholar] [CrossRef]
- Masato, A. Vehicle Handling Dynamics: Theory and Application; Butterworth-Heinemann: Oxford, UK, 2015. [Google Scholar]
- Ren, B.; Ge, S.; Tee, K.; Lee, T. Adaptive Neural Control for Output Feedback Nonlinear Systems Using a Barrier Lyapunov Function. IEEE Trans. Neural Netw. 2010, 21, 1339–1345. [Google Scholar] [PubMed]
- Yu, J.; Shi, P.; Zhao, L. Finite-time command filtered backstepping control for a class of nonlinear systems. Automatica 2018, 92, 173–180. [Google Scholar] [CrossRef]
- Shino, M.; Miyamoto, N.; Wang, Y.; Nagai, M. Traction control of electric vehicles considering vehicle stability. In Proceedings of the 6th International Workshop on Advanced Motion Control, Nagoya, Japan, 30 March–1 April 2000. [Google Scholar]
- Liu, W.; Ding, H.; Guo, K.; Zhou, B. Application of Side-Slip Angle Phasigram to Vehicle ESC System. Trans. Beijing Inst. Technol. 2013, 33, 42–46. [Google Scholar]
- Ulsoy, A.; Peng, H.; Çakmakci, M. Automotive Control Systems; Cambridge University Press: Cambridge, UK, 2012. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Acting Brake | ||
|---|---|---|---|
| Oversteer | Right-side wheel | ||
| Understeer | Left-side wheel | ||
| Understeer | Right-side wheel | ||
| Oversteer | Left-side wheel |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, L.; Liu, Z.; Zhao, D. Command-Filtered Yaw Stability Control of Vehicles with State Constraints. Actuators 2025, 14, 148. https://doi.org/10.3390/act14030148
Wu L, Liu Z, Zhao D. Command-Filtered Yaw Stability Control of Vehicles with State Constraints. Actuators. 2025; 14(3):148. https://doi.org/10.3390/act14030148
Chicago/Turabian StyleWu, Lizhe, Zhenhua Liu, and Dingxuan Zhao. 2025. "Command-Filtered Yaw Stability Control of Vehicles with State Constraints" Actuators 14, no. 3: 148. https://doi.org/10.3390/act14030148
APA StyleWu, L., Liu, Z., & Zhao, D. (2025). Command-Filtered Yaw Stability Control of Vehicles with State Constraints. Actuators, 14(3), 148. https://doi.org/10.3390/act14030148