
Event-Triggered Bipartite Formation Control for Switched Nonlinear Multi-Agent Systems with Function Constraints on States


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- (1)
- An adaptive fuzzy event-triggered bipartite time-varying formation control scheme is proposed, which expands the scope of practical application and alleviates the communication burden and explosion of complexity.
- (2)
- (3)
2. System Description and Preliminaries
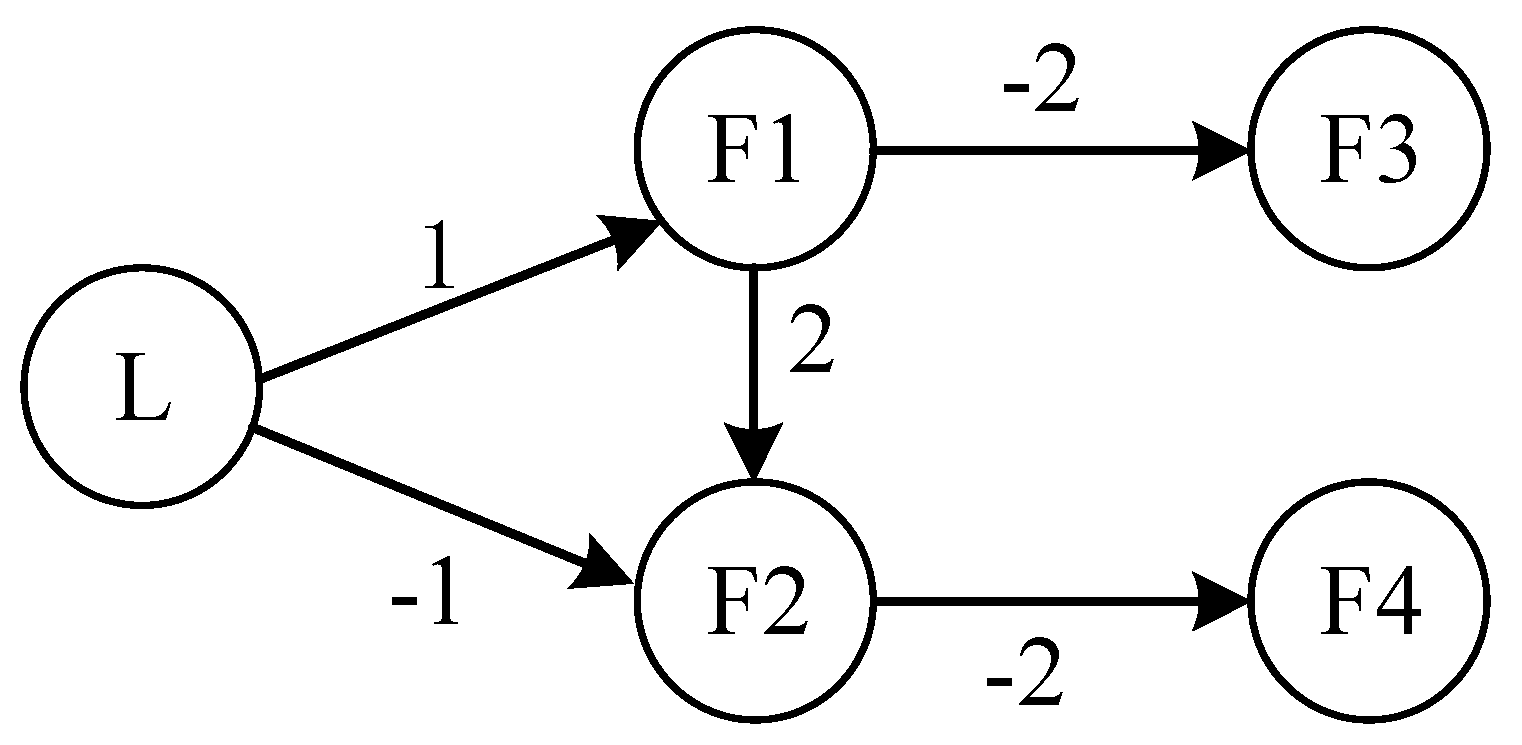
2.1. Graph Theory
2.2. Switched MASs Description
3. Event-Triggered Bipartite Formation Controller Design Based on FTPPF and Stability Analysis
- (1)
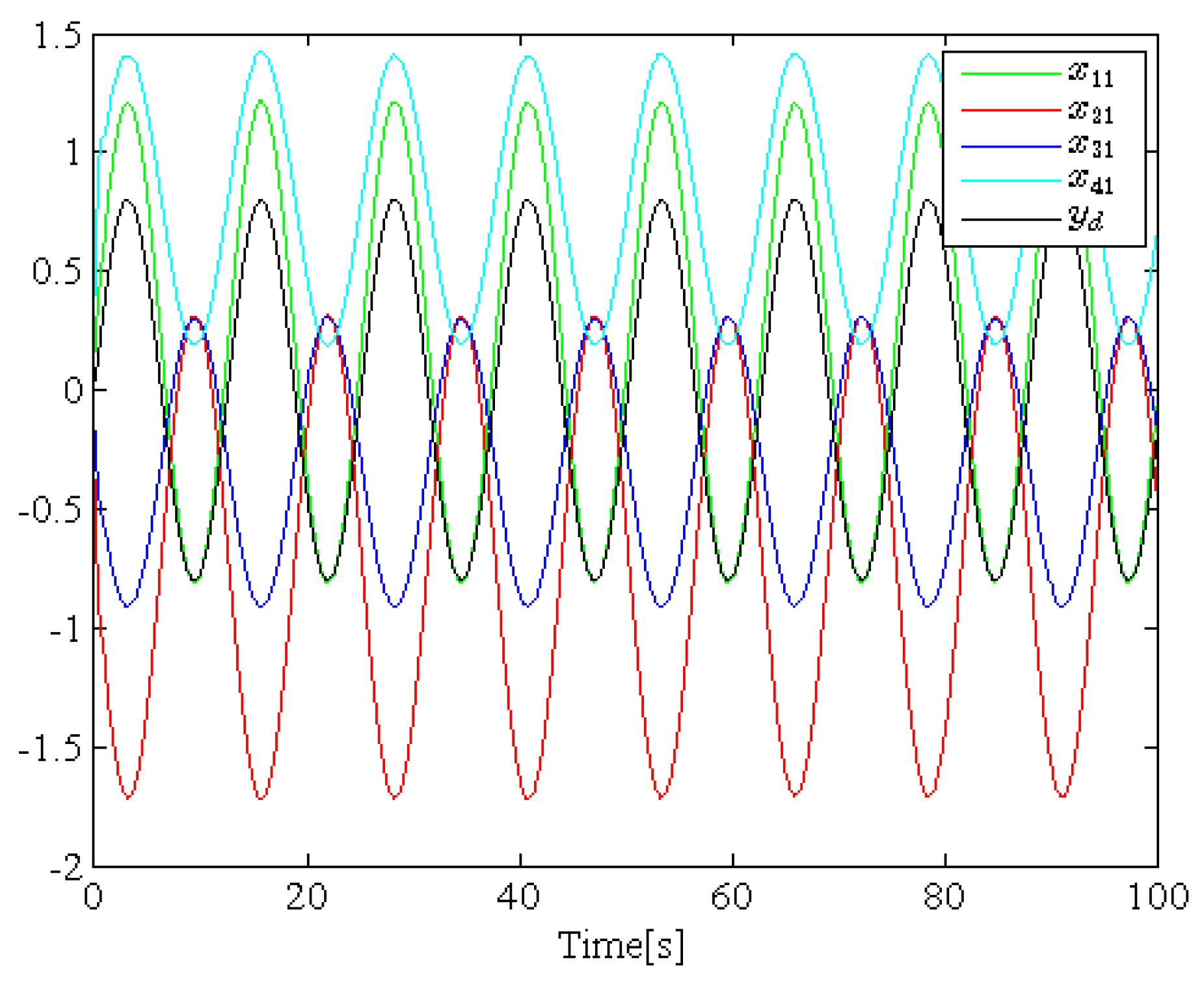
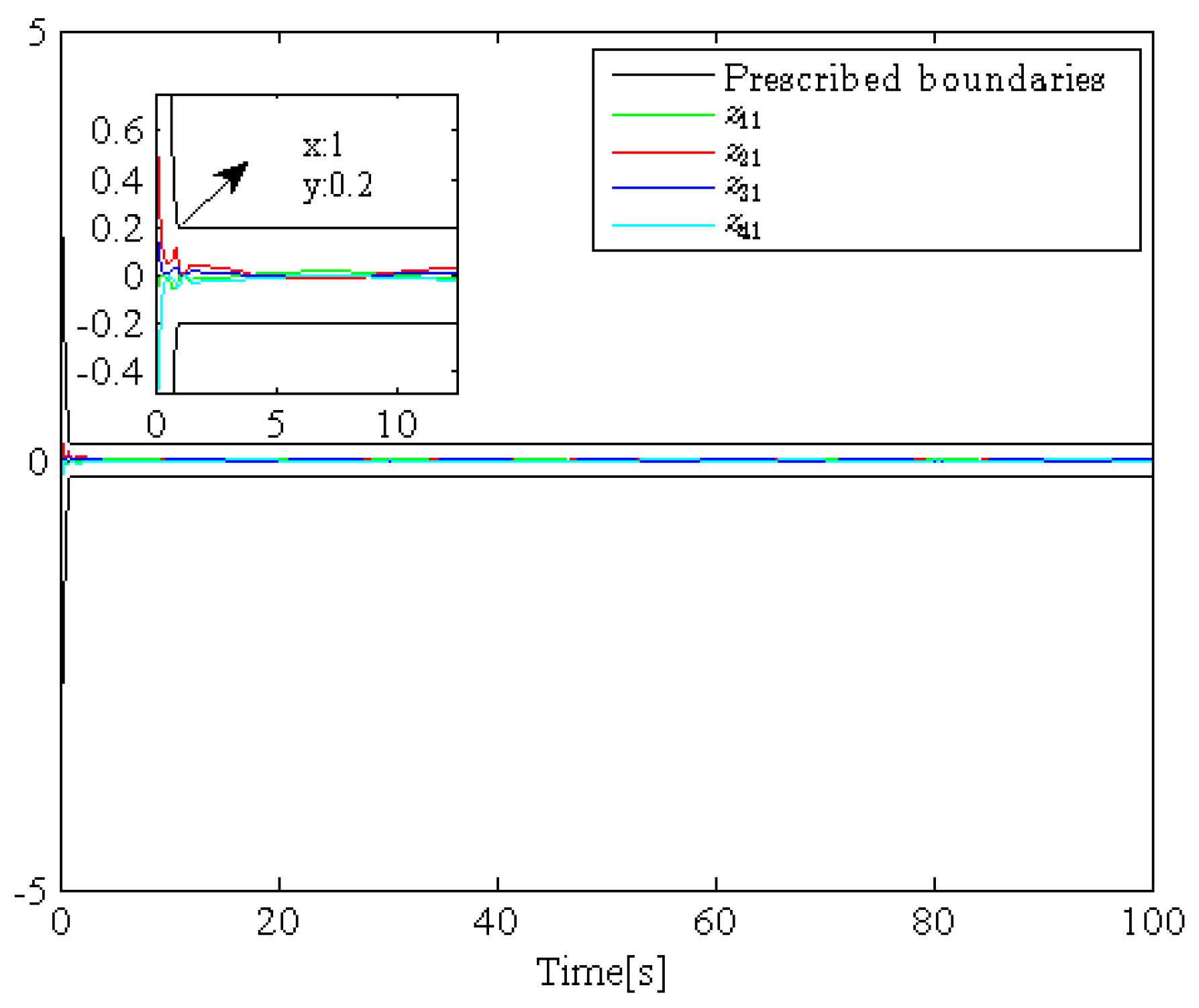
- Bipartite formation consensus tracking control is realized, and the formation error converges to the prescribed boundary within a predesigned time ;
- (2)
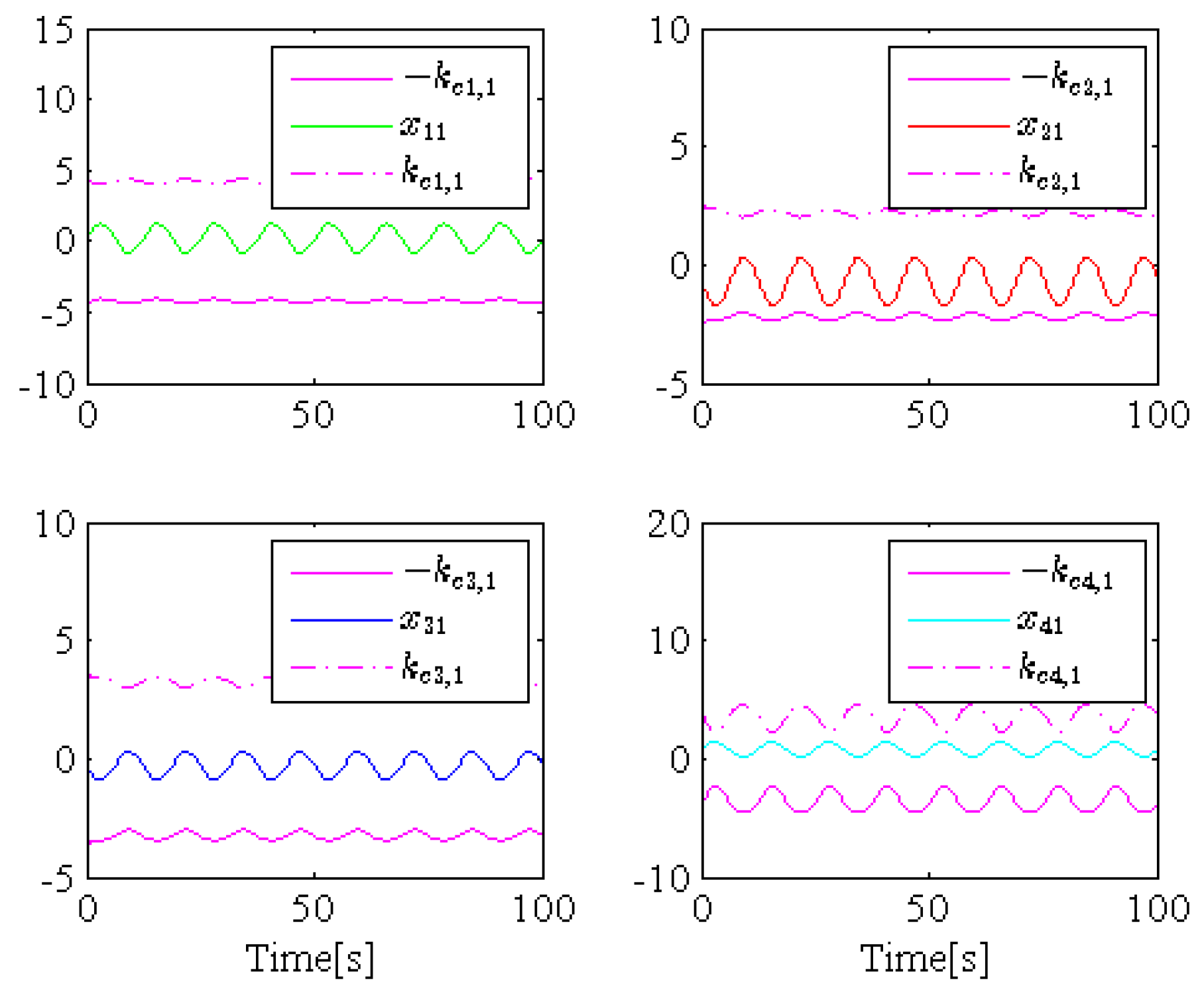
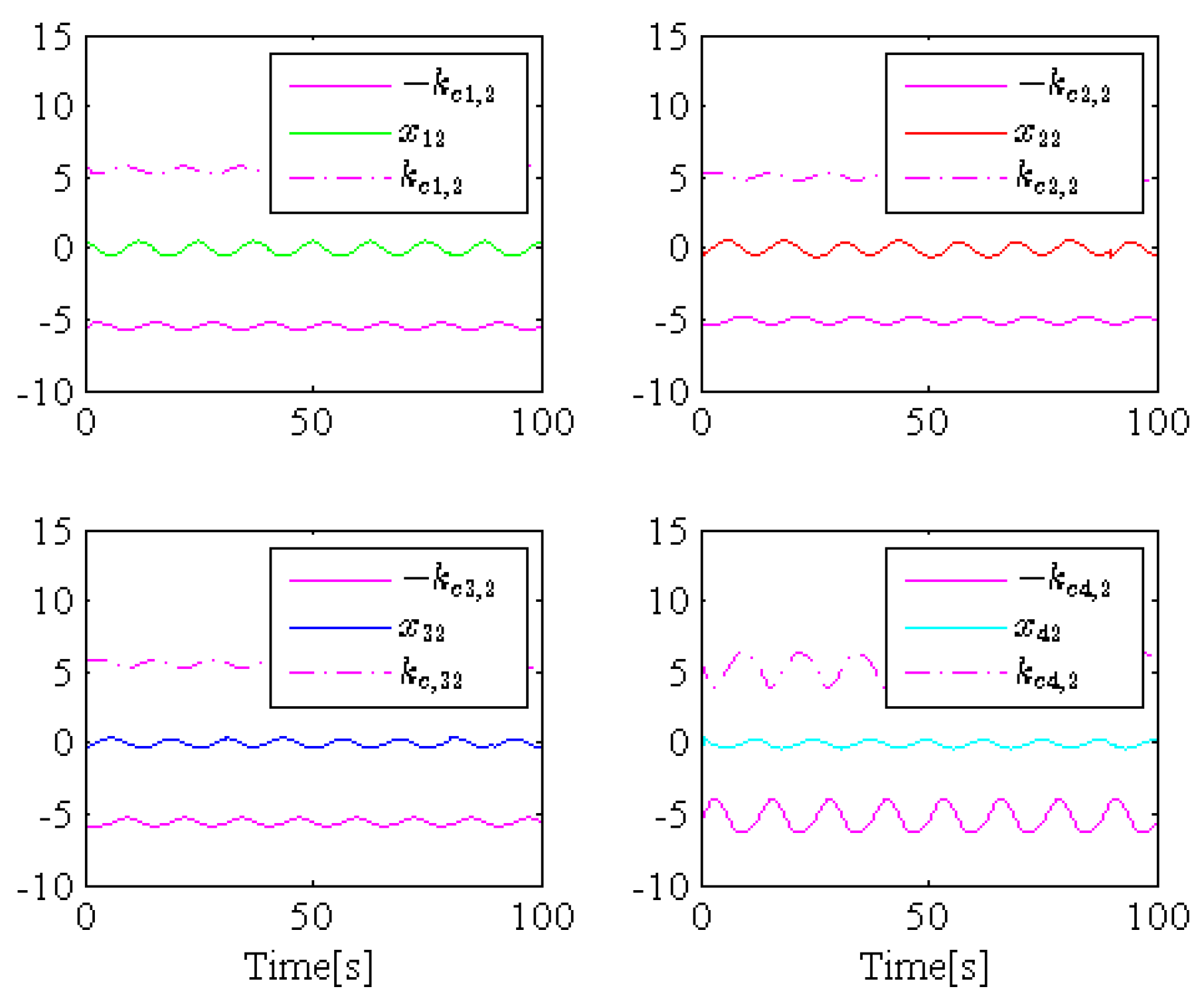
- All states satisfy the constraint boundaries;
- (3)
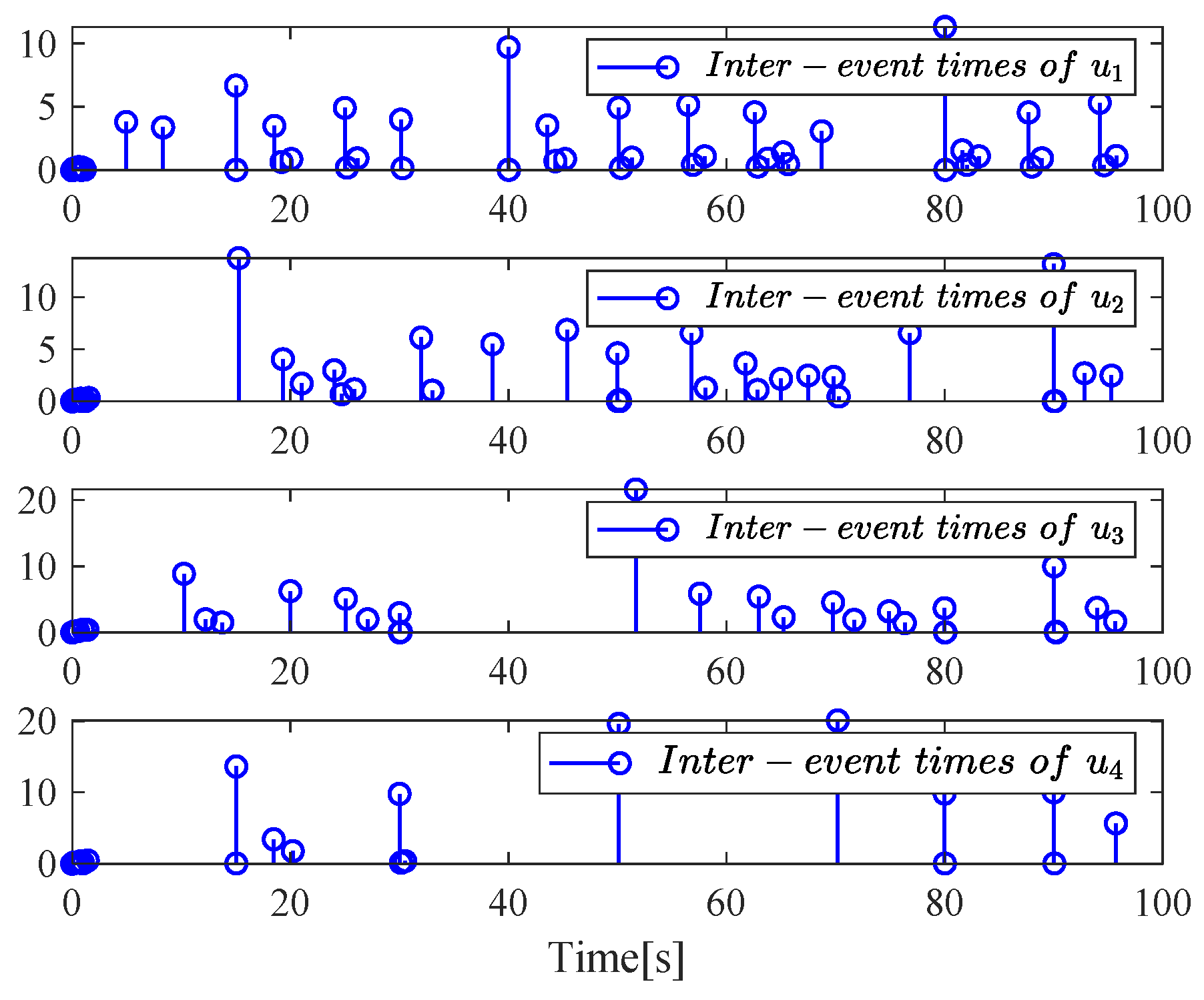
- All signals are bounded with Zeno-free behavior.
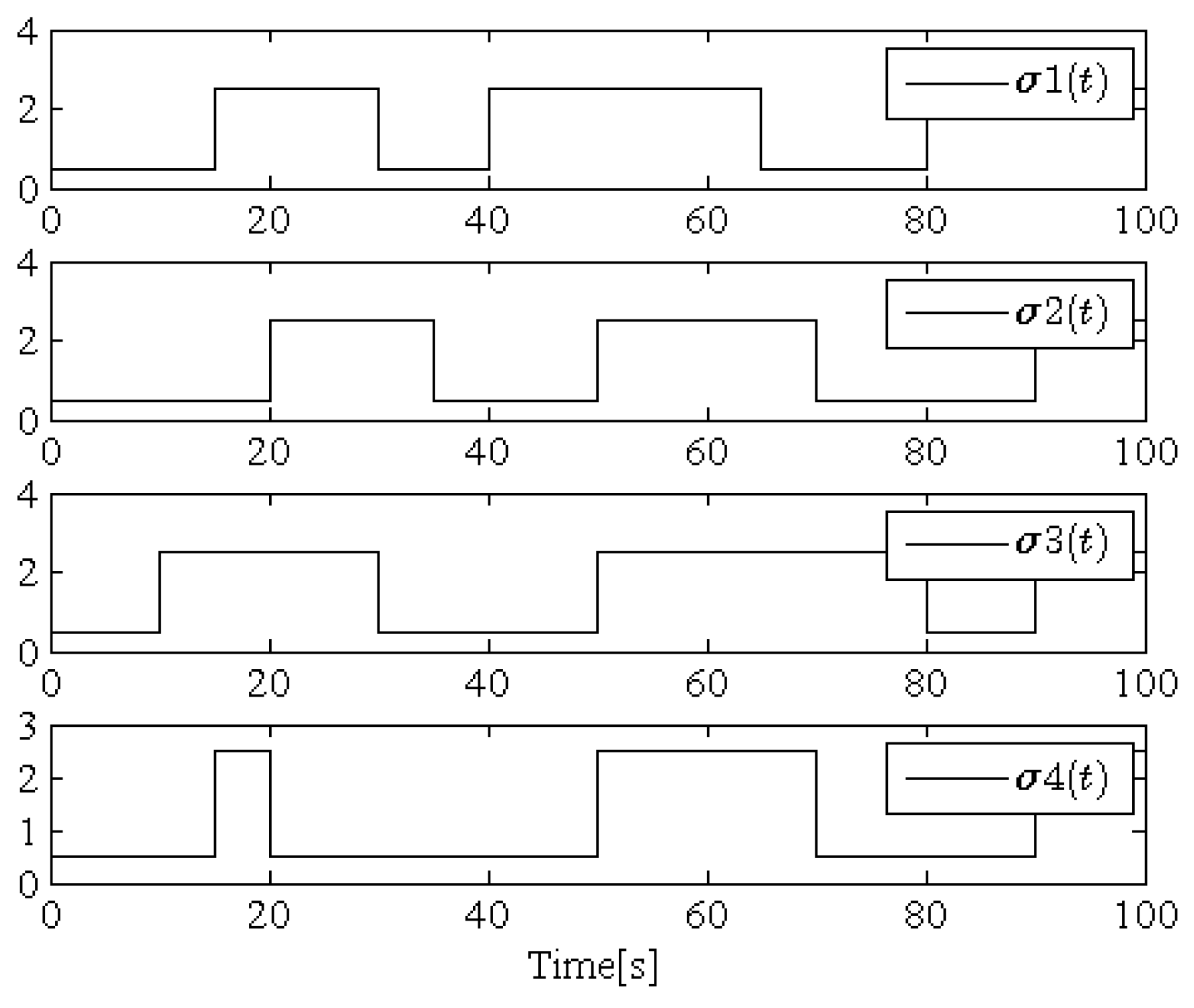
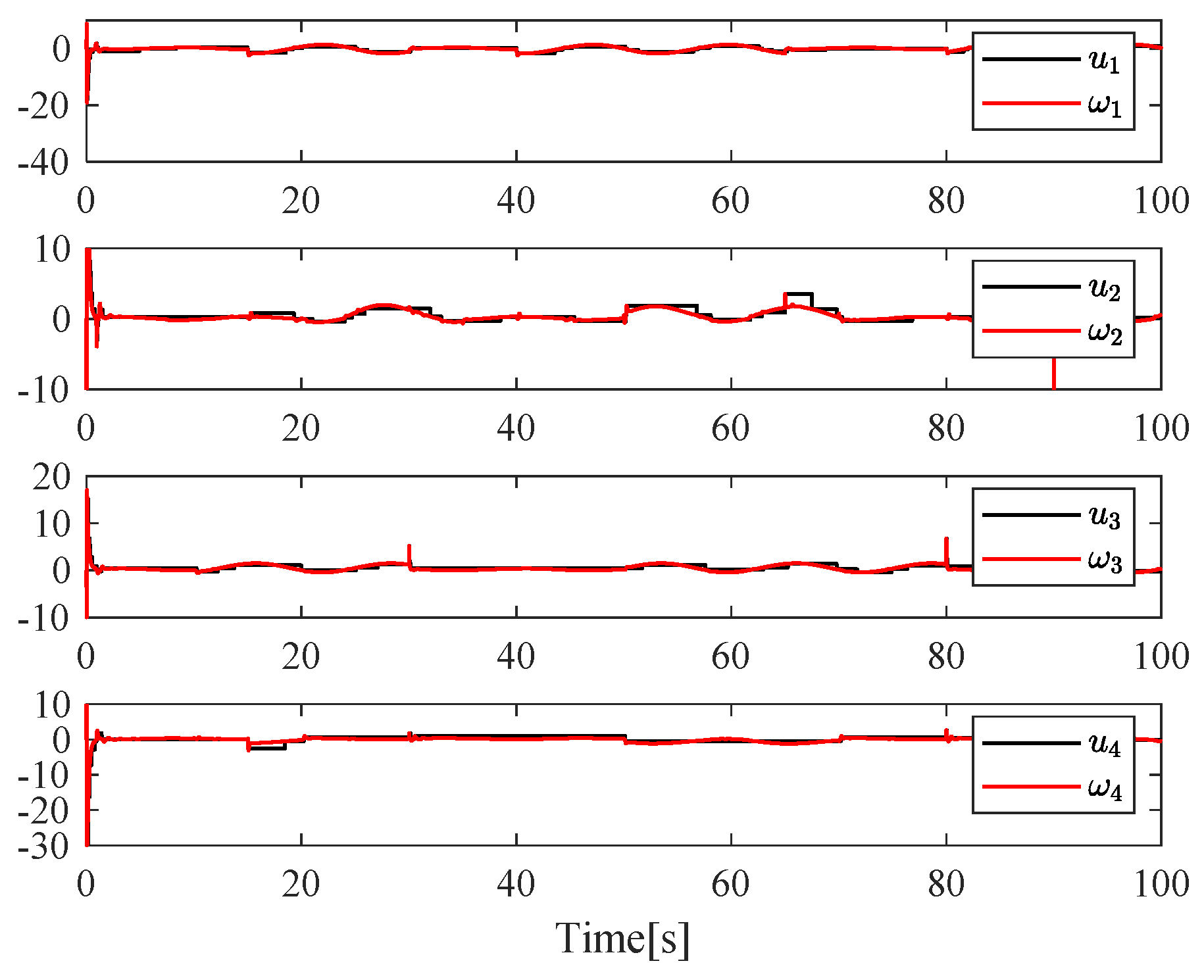
4. Simulation Example
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Gao, X.Y.; Wang, J.Q.; Teo, K.L.; Yang, H.F.; Yang, X.R. Dynamic gain scheduling control design for linear multiagent systems subject to input saturation. J. Frankl. Inst. 2023, 360, 4597–4625. [Google Scholar] [CrossRef]
- Wang, Z.H. Consensus control for linear multiagent systems under delayed transmitted information. IEEE Trans. Syst. Man Cybern. Syst. 2023, 53, 5670–5678. [Google Scholar] [CrossRef]
- Wu, J.; Lu, M.; Deng, F.; Chen, J. Cooperative Output Regulation of Heterogeneous Linear Multi-Agent Systems: A Distributed Output Feedback Control Approach. In Proceedings of the 2023 China Automation Congress (CAC), Chongqing, China, 17–19 November 2023; pp. 5112–5117. [Google Scholar]
- Ma, Z.; Tong, S. Nonlinear filters-based adaptive fuzzy control of strict-feedback nonlinear systems with unknown asymmetric dead-zone output. IEEE Trans. Autom. Sci. Eng. 2024, 21, 5099–5109. [Google Scholar] [CrossRef]
- Yu, J.; Shi, P.; Dong, W.; Lin, C. Adaptive fuzzy control of nonlinear systems with unknown dead zones based on command filtering. IEEE Trans. Fuzzy Syst. 2018, 26, 46–55. [Google Scholar] [CrossRef]
- Wang, H.; Zong, G.; Yang, D.; Xia, J. Observer-based adaptive neural fault-tolerant control for nonlinear systems with prescribed performance and input dead-zone. Int. J. Robust Nonlinear Control. 2024, 34, 114–131. [Google Scholar] [CrossRef]
- Zhou, R.; Wen, G.; Zhu, J.; Li, B. Adaptive neural network observer control for a class of nonlinear strict-feedback systems with unmeasurable states. Int. J. Control. 2024, 97, 165–174. [Google Scholar] [CrossRef]
- Chen, L.; Tong, S. Observer-based adaptive fuzzy consensus control of nonlinear multi-agent systems encountering deception attacks. IEEE Trans. Ind. Inform. 2024, 20, 1808–1818. [Google Scholar] [CrossRef]
- Liu, Z.; Huang, H.; Park, J.H.; Huang, J.; Wang, X.; Lv, M. Adaptive fuzzy control for unknown nonlinear multi-agent systems with switching directed communication topologies. IEEE Trans. Fuzzy Syst. 2023, 31, 2487–2494. [Google Scholar] [CrossRef]
- Liu, D.; Liu, Z.; Chen, C.L.P.; Zhang, Y. Distributed adaptive neural control for uncertain multi-agent systems with unknown actuator failures and unknown dead zones. Nonlinear Dyn. 2020, 99, 1001–1017. [Google Scholar] [CrossRef]
- Chen, L.; Li, Y.; Tong, S. Neural network adaptive consensus control for nonlinear multi-agent systems encountered sensor attacks. Int. J. Syst. Sci. 2023, 54, 2536–2550. [Google Scholar] [CrossRef]
- Caiazzo, B.; Lui, D.G.; Petrillo, A.; Santini, S. Signed average consensus in cooperative-antagonistic multi-agent systems with multiple communication time-varying delays. IFAC-Pap. 2024, 58, 114–119. [Google Scholar] [CrossRef]
- Zhao, M.; Peng, C.; Tian, E. Finite-time and fixed-time bipartite consensus tracking of multi-agent systems with weighted antagonistic interactions. IEEE Trans. Circuits Syst. I Regul. Pap. 2021, 68, 426–433. [Google Scholar] [CrossRef]
- Gong, X.; Cui, Y.; Shen, J.; Shu, Z.; Huang, T. Distributed prescribed-time interval bipartite consensus of multi-agent systems on directed graphs: Theory and experiment. IEEE Trans. Netw. Sci. Eng. 2021, 8, 613–624. [Google Scholar] [CrossRef]
- Wang, L.; Yan, H.; Chang, Y.; Wang, M.; Li, Z. Fixed-time fully distributed observer-based bipartite consensus tracking for nonlinear heterogeneous multiagent systems. Inf. Sci. 2023, 635, 221–235. [Google Scholar] [CrossRef]
- Liu, D.; Zhou, Z.P.; Li, T.S. Data-driven bipartite consensus tracking for nonlinear multiagent systems with prescribed performance. IEEE Trans. Syst. Man Cybern. Systems 2023, 53, 3666–3674. [Google Scholar] [CrossRef]
- Vamvoudakis, K.G. Event-triggered optimal adaptive control algorithm for continuous-time nonlinear systems. IEEE/CAA J. Autom. Sin. 2014, 1, 282–293. [Google Scholar] [CrossRef]
- Yang, Y.; Niu, Y. Event-triggered adaptive neural backstepping control for nonstrict-feedback nonlinear time-delay systems. J. Frankl. Inst. 2020, 357, 4624–4644. [Google Scholar] [CrossRef]
- Ning, P.; Hua, C.; Li, K.; Meng, R. Event-triggered control for nonlinear uncertain systems via a prescribed-time approach. IEEE Trans. Autom. Control. 2023, 68, 6975–6981. [Google Scholar] [CrossRef]
- Zhang, J.; Niu, B.; Wang, D.; Wang, H.; Zhao, P.; Zong, G. Time-/event-triggered adaptive neural asymptotic tracking control for nonlinear systems with full-state constraints and application to a single-link robot. IEEE Trans. Neural Netw. Learn. Syst. 2022, 33, 6690–6700. [Google Scholar] [CrossRef]
- Ren, H.; Liu, R.; Cheng, Z.; Ma, H.; Li, H. Data-driven event-triggered control for nonlinear multi-agent systems with uniform quantization. IEEE Trans. Circuits Syst. II: Express Briefs 2024, 71, 712–716. [Google Scholar] [CrossRef]
- Yang, X.; Zhang, X.; Cao, J.; Liu, H. Observer-based adaptive fuzzy fractional backstepping consensus control of uncertain multiagent systems via event-triggered scheme. IEEE Trans. Fuzzy Syst. 2024, 32, 3953–3967. [Google Scholar] [CrossRef]
- Chen, X.; Hu, S.; Yang, T.; Xie, X.; Qiu, J. Event-triggered bipartite consensus of multiagent systems with input saturation and DoS attacks over weighted directed networks. IEEE Trans. Syst. Man Cybern. Syst. 2024, 54, 4054–4065. [Google Scholar] [CrossRef]
- Zhang, W.; Huang, Q.; Alhudhaif, A. Event-triggered fixed-time bipartite consensus for nonlinear disturbed multi-agent systems with leader-follower and leaderless controller. Inf. Sci. 2024, 662, 120243. [Google Scholar] [CrossRef]
- Zhou, H.; Tong, S. Fuzzy adaptive event-triggered resilient formation control for nonlinear multiagent systems under DoS attacks and input saturation. IEEE Trans. Syst. Man Cybern. Syst. 2024, 54, 3665–3674. [Google Scholar] [CrossRef]
- Yang, W.; Shi, Z.; Zhong, Y. Robust time-varying formation control for uncertain multi-agent systems with communication delays and nonlinear couplings. Int. J. Robust Nonlinear Control. 2024, 34, 147–166. [Google Scholar] [CrossRef]
- Yang, S.; Bai, W.; Li, T.; Shi, Q.; Yang, Y.; Wu, Y.; Chen, C.P. Neural-network-based formation control with collision, obstacle avoidance and connectivity maintenance for a class of second-order nonlinear multi-agent systems. Neurocomputing 2021, 439, 243–255. [Google Scholar] [CrossRef]
- Valcher, M.; Misra, P. On the consensus and bipartite consensus in high-order multi-agent dynamical systems with antagonistic interactions. Syst. Control. Lett. 2014, 66, 94–103. [Google Scholar] [CrossRef]
- Cai, Y.; Zhang, H.; Gao, Z.; Yang, L.; He, Q. Adaptive bipartite event-triggered time-varying output formation tracking of heterogeneous linear multi-agent systems under signed directed graph. IEEE Trans. Neural Netw. Learn. Syst. 2022, 34, 7049–7058. [Google Scholar] [CrossRef]
- Cai, Y.; Zhang, H.; Zhang, J.; Xi, R.; He, Q. Fully distributed bipartite time-varying formation control for uncertain linear multi-agent systems under event-triggered mechanism. Int. J. Robust Nonlinear Control. 2021, 31, 5165–5187. [Google Scholar] [CrossRef]
- Lu, W.; Zong, C.; Li, J.; Liu, D. Bipartite consensus-based formation control of high-order multi-robot systems with time-varying delays. Trans. Inst. Meas. Control. 2022, 44, 1297–1308. [Google Scholar] [CrossRef]
- Li, W.; Zhang, H.; Zhou, Y.; Wang, Y. Bipartite formation tracking for multi-agent systems using fully distributed dynamic edge-event-triggered protocol. IEEE/CAA J. Autom. Sinica 2022, 9, 847–853. [Google Scholar] [CrossRef]
- Li, W.; Zhang, H.; Cai, Y.; Wang, Y. Fully distributed event-triggered bipartite formation tracking for multi-agent systems with multiple leaders and matched uncertainties. Inf. Sci. 2022, 596, 537–550. [Google Scholar] [CrossRef]
- Zhao, Y.; Zhu, F.; Xu, D. Self-triggered bipartite formation-containment control for heterogeneous multi-agent systems with disturbances. Neurocomputing 2023, 548, 126382. [Google Scholar] [CrossRef]
- Li, T.; Li, S.; Wang, Y.; Hui, Y.; Han, J. Bipartite Formation Control of Nonlinear Multi-Agent Systems with Fixed and Switching Topologies under Aperiodic DoS Attacks. Electronics 2024, 13, 696. [Google Scholar] [CrossRef]
- Wang, X.; Ye, D.; Wei, F. Optimized bipartite formation control for multiagent systems with obstacle and collision avoidance. Inf. Sci. 2024, 662, 120122. [Google Scholar] [CrossRef]
- Chen, Z.; Liu, Y.; He, W.; Qiao, H.; Ji, H. Adaptive-neural-network-based trajectory tracking control for a nonholonomic wheeled mobile robot with velocity constraints. IEEE Trans. Ind. Electron. 2021, 68, 5057–5067. [Google Scholar] [CrossRef]
- Li, D.; Wang, Y.; Liu, Y.J.; Liu, L. IBLFs-based adaptive fuzzy control for Continuous Stirred Tank Reactors with full state constraints and actuator faults. J. Process Control. 2023, 124, 14–24. [Google Scholar] [CrossRef]
- Wang, J.; Yan, Y.; Liu, Z.; Chen, C.P.; Zhang, C.; Chen, K. Finite-time consensus control for multi-agent systems with full-state constraints and actuator failures. Neural Netw. 2023, 157, 350–363. [Google Scholar] [CrossRef] [PubMed]
- Sun, L.; Zang, Y.; Zhang, X.; Zhu, G.; Zhong, C.; Wang, C. Adaptive event-triggered cooperative tracking control under full-state constraints based on nonlinear time-varying multi-agent systems. Int. J. Control Autom. Syst. 2024, 22, 867–882. [Google Scholar] [CrossRef]
- Sui, J.; Liu, C.; Niu, B.; Zhao, X.; Wang, D.; Yan, B. Prescribed performance adaptive containment control for full-state constrained nonlinear multiagent systems: A disturbance observer-based design strategy. IEEE Trans. Autom. Sci. Eng. 2024, 1–12. [Google Scholar] [CrossRef]
- Wang, X.; Pang, N.; Xu, Y.; Huang, T.; Kurths, J. On state-constrained containment control for nonlinear multiagent systems using event-triggered input. IEEE Trans. Syst. Man Cybern. Syst. 2024, 54, 2530–2538. [Google Scholar] [CrossRef]
- Shahvali, M.; Azarbahram, A.; Naghibi-Sistani, M.B.; Askari, J. Bipartite consensus control for fractional-order nonlinear multi-agent systems: An output constraint approach. Neurocomputing 2020, 397, 212–223. [Google Scholar] [CrossRef]
- Huang, S.; Zong, G.; Niu, B.; Xu, N.; Zhao, X. Dynamic self-triggered fuzzy bipartite time-varying formation tracking for nonlinear multiagent systems with deferred asymmetric output constraints. IEEE Trans. Fuzzy Syst. 2024, 32, 2700–2712. [Google Scholar] [CrossRef]
- Sui, S.; Shen, D.; Bi, W.; Tong, S.; Chen, C.L.P. Observer-based event-triggered bipartite consensus for nonlinear multi-agent systems: Asymmetric full-state constraints. IEEE Trans. Autom. Sci. Eng. 2024, 1–11. [Google Scholar] [CrossRef]
- Niu, B.; Zhang, Y.; Zhao, X.; Wang, H.; Sun, W. Adaptive predefined-time bipartite consensus tracking control of constrained nonlinear MASs: An improved nonlinear mapping function method. IEEE Trans. Cybern. 2023, 53, 6017–6026. [Google Scholar] [CrossRef] [PubMed]
- Liu, S.; Niu, B.; Karimi, H.R.; Zhao, X. Self-triggered fixed-time bipartite fault-tolerant consensus for nonlinear multiagent systems with function constraints on states. Chaos Soliton. Fract. 2024, 178, 114367. [Google Scholar] [CrossRef]
- Xin, B.; Cheng, S.; Wang, Q.; Chen, J.; Deng, F. Fixed-time prescribed performance consensus control for multiagent systems with nonaffine faults. IEEE Trans. Fuzzy Syst. 2023, 31, 3433–3446. [Google Scholar] [CrossRef]
- Bi, W.; Zhang, C.; Sui, S.; Tong, S.; Chen, C.P. Fixed-Time Fuzzy Adaptive Bipartite Output Consensus Tracking for Nonlinear Coopetition MASs. IEEE Trans. Fuzzy Syst. 2024, 32, 2775–2785. [Google Scholar] [CrossRef]
- Li, X.; Long, L. Distributed event-triggered fuzzy control of heterogeneous switched multiagent systems under Switching topologies. IEEE Trans. Fuzzy Syst. 2024, 32, 574–585. [Google Scholar] [CrossRef]
- Niu, B.; Liu, X.; Guo, Z.; Jiang, H.; Wang, H. Adaptive intelligent control-based consensus tracking for a class of switched nonstrict feedback nonlinear multiagent systems with unmodeled dynamics. IEEE Trans. Artif. Intell. 2024, 5, 1624–1634. [Google Scholar] [CrossRef]
- Zhang, R.; Li, S.; Ahn, C.K.; Chadli, M. Fully distributed adaptive fuzzy consensus for heterogeneous switched nonlinear multiagent systems under state-dependent switchings. IEEE Trans. Fuzzy Syst. 2024, 32, 607–620. [Google Scholar] [CrossRef]
- Liang, H.; Wang, W.; Pan, Y.; Lam, H.K.; Sun, J. Synchronous MDADT-based fuzzy adaptive tracking control for switched multiagent systems via modified self-triggered mechanism. IEEE Trans. Fuzzy Syst. 2024, 32, 2876–2889. [Google Scholar] [CrossRef]
- Yoo, S.J.; Park, B.S. Adaptive flexible performance function approach for dynamic obstacle avoidance to distributed formation tracking of range-constrained switched nonlinear multiagent systems. Int. J. Robust Nonlinear Control. 2024, 34, 4864–4880. [Google Scholar] [CrossRef]
- Li, Y.; Li, Y.; Tong, S. Event-based finite-time control for nonlinear multiagent systems with asymptotic tracking. IEEE Trans. Autom. Control. 2023, 68, 3790–3797. [Google Scholar] [CrossRef]
- Andreotti, A.; Caiazzo, B.; Lui, D.; Petrillo, A.; Santini, S. Asymptotic voltage restoration in islanded microgrids via an adaptive asynchronous event-triggered finite-time fault-tolerant control. Sustain. Energy Grids Netw. 2024, 39, 101406. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hou, Y.; Li, S. Event-Triggered Bipartite Formation Control for Switched Nonlinear Multi-Agent Systems with Function Constraints on States. Actuators 2025, 14, 23. https://doi.org/10.3390/act14010023
Hou Y, Li S. Event-Triggered Bipartite Formation Control for Switched Nonlinear Multi-Agent Systems with Function Constraints on States. Actuators. 2025; 14(1):23. https://doi.org/10.3390/act14010023
Chicago/Turabian StyleHou, Yingxue, and Shu Li. 2025. "Event-Triggered Bipartite Formation Control for Switched Nonlinear Multi-Agent Systems with Function Constraints on States" Actuators 14, no. 1: 23. https://doi.org/10.3390/act14010023
APA StyleHou, Y., & Li, S. (2025). Event-Triggered Bipartite Formation Control for Switched Nonlinear Multi-Agent Systems with Function Constraints on States. Actuators, 14(1), 23. https://doi.org/10.3390/act14010023