


Active Disturbance Rejection Control for the Trajectory Tracking of a Quadrotor

 ,
,  ,
,  , ,
, ,
Abstract
1. Introduction
- The proposed approach is based on two sets of ADRC control loops, one for tracking a reference in the z axis (denoted as a direct loop) and an additional loop to control the reference trajectories in the plane. This action is indirectly performed, since it depends on the orientation control (indirect loop).
- The orientation control design, a crucial aspect of our research, involves a comprehensive algebraic procedure. This procedure provides the dynamic relation between the dynamics, the orientation control inputs, and the ADRC design, ensuring a robust and reliable system.
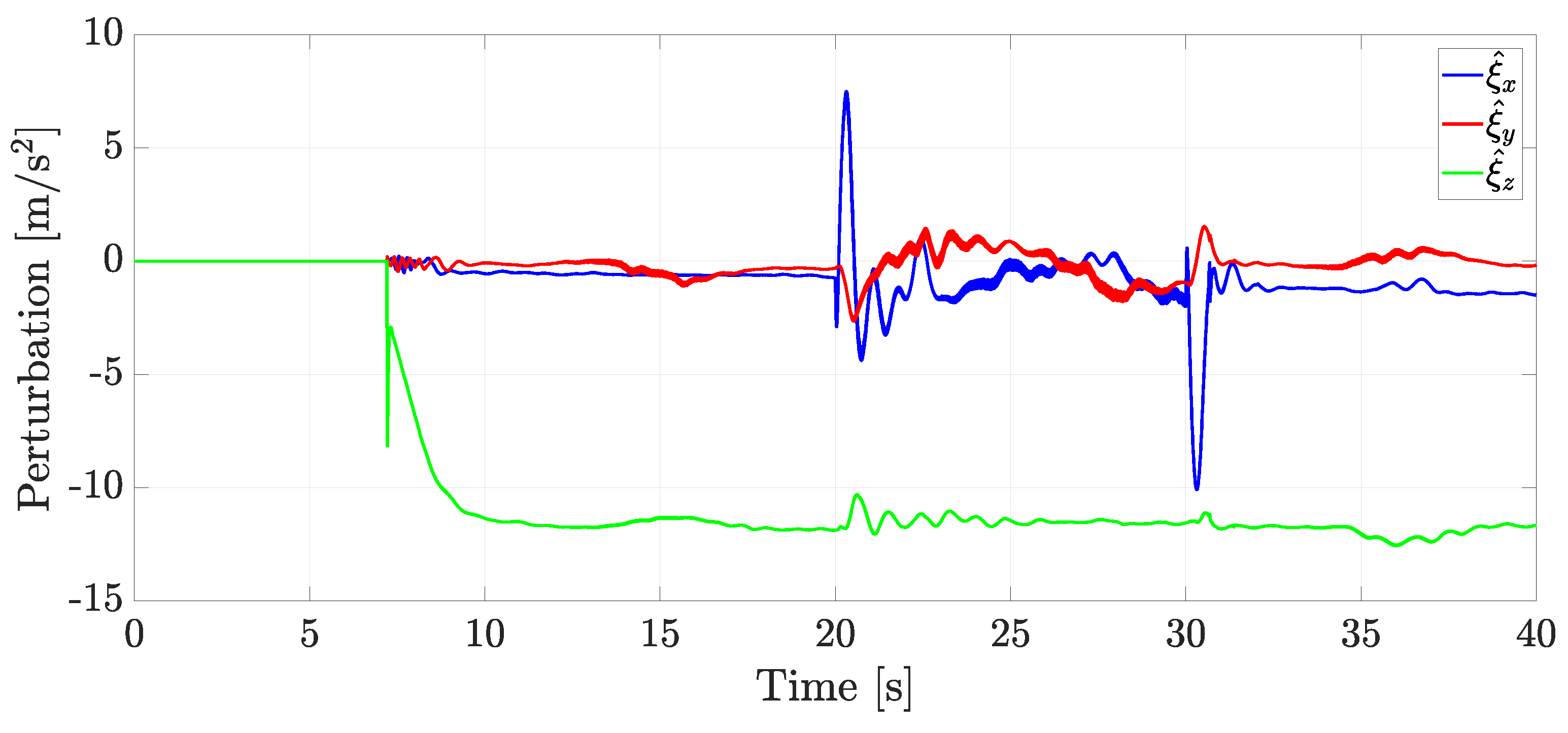
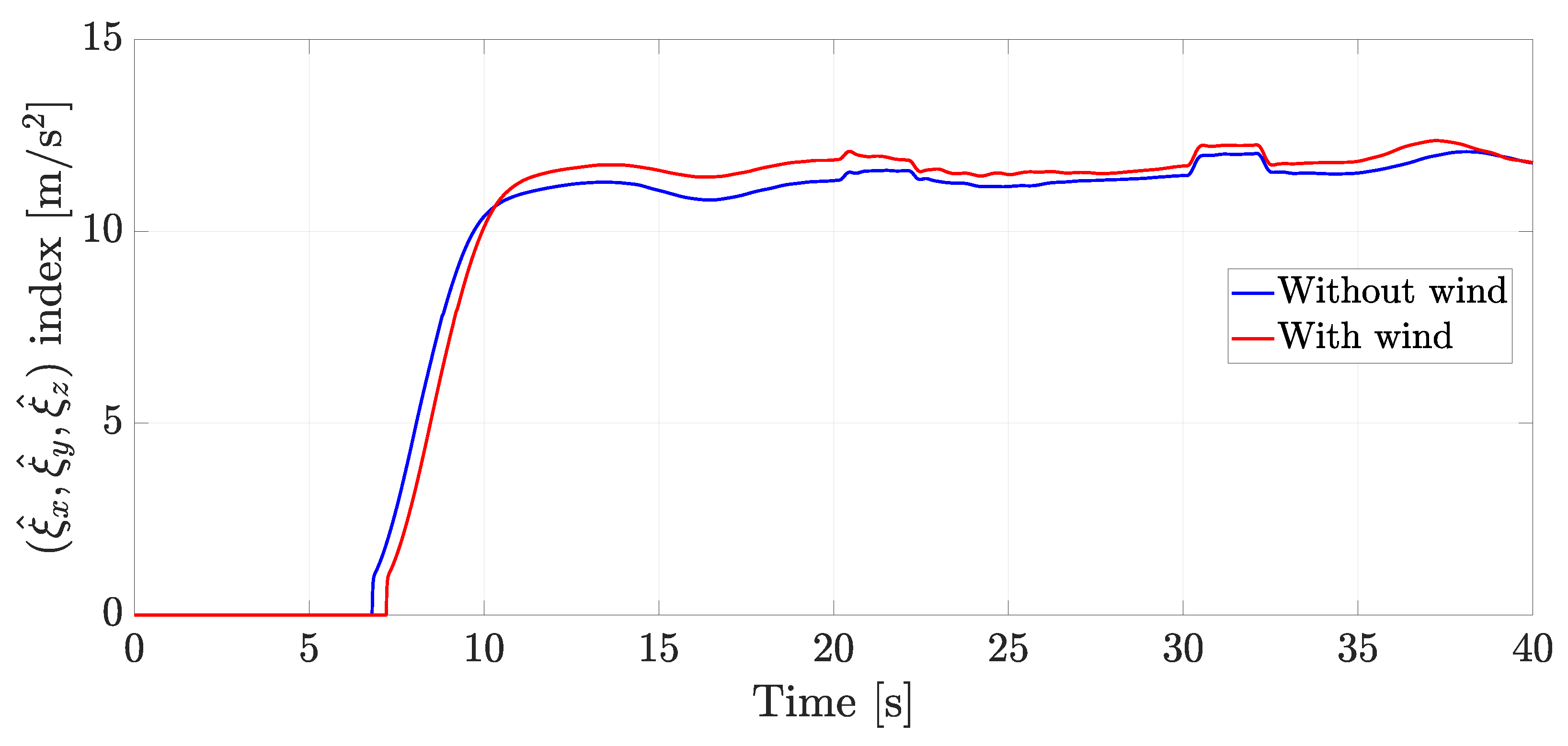
- The scheme also considers the estimation and cancellation of external disturbances and internal perturbations, such as non-modeled dynamics of possible coupling effects through the ESO.
- The proposal is not just theoretical. It was experimentally assessed in trajectory-tracking tasks, considering a fan that provided external perturbations. This practical assessment reaffirmed the applicability of our approach in real-world scenarios.
2. Problem Statement
3. Control Strategy
3.1. Trajectory Tracking Control of z: A Direct ADRC Scheme
3.2. Trajectory Tracking Control of : An Indirect ADRC Scheme
- An external control loop of ADRC nature involved in the trajectory tracking control of , whose control input is and .
- An internal control loop taking the control inputs obtained from the external control loop as reference states to be further controlled in the dynamics of (4).
- Notice that the internal control loop is assumed to be fast enough to respect the time scale separation principle (see [59]).
3.2.1. External Control Loop Design
3.2.2. Internal Control Loop
3.3. Orientation Control
4. Numerical Simulations and Real-Time Experiments
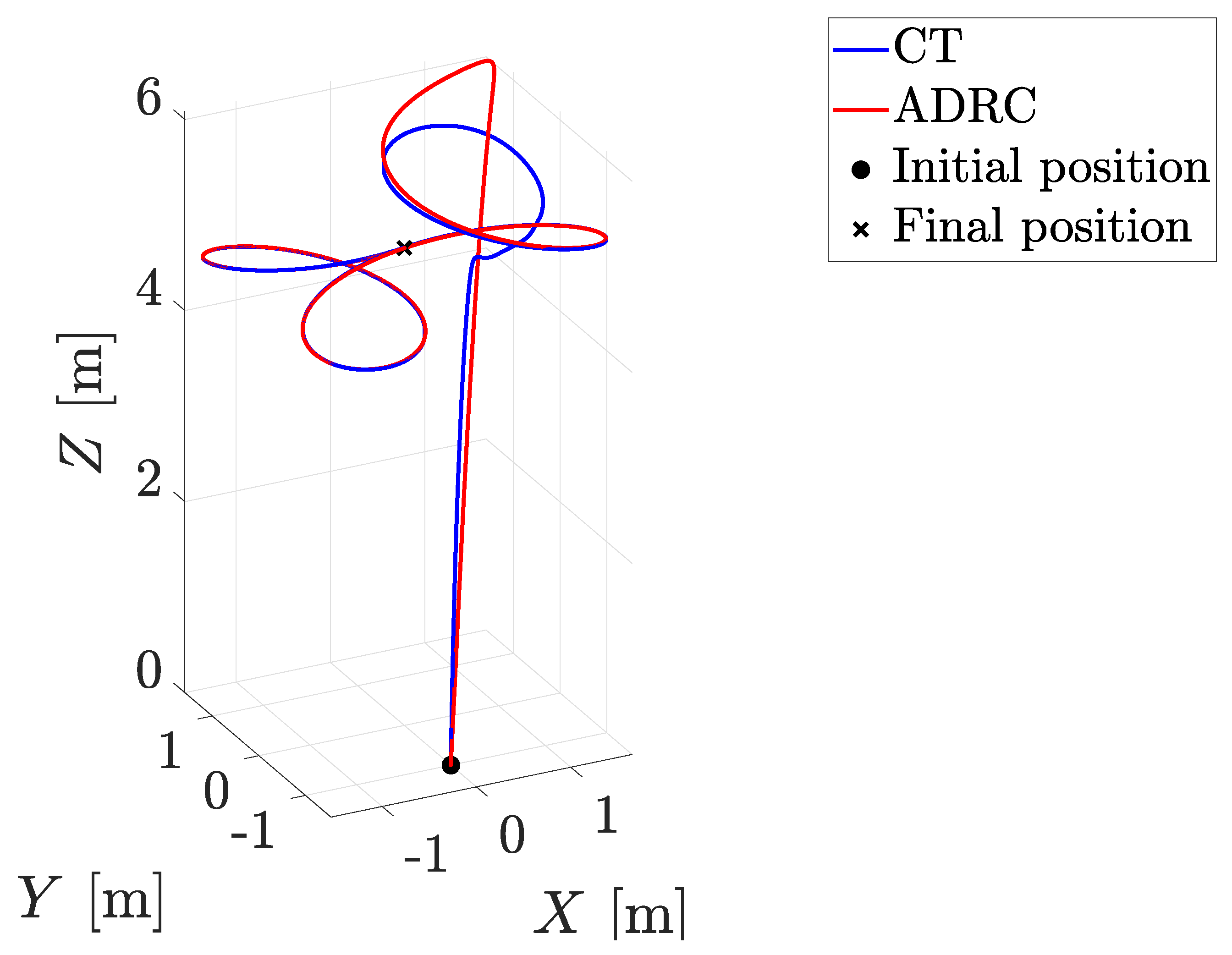
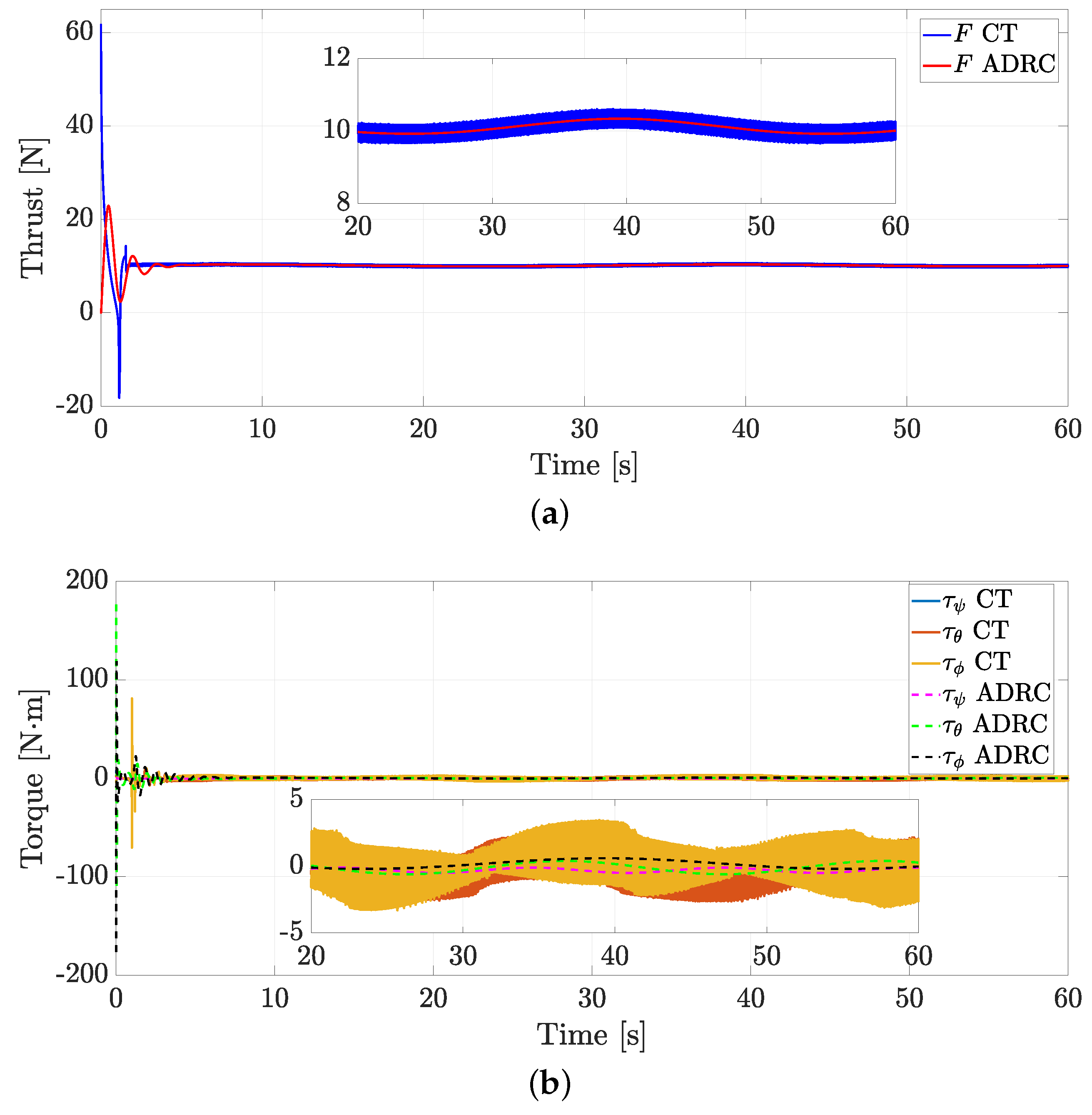
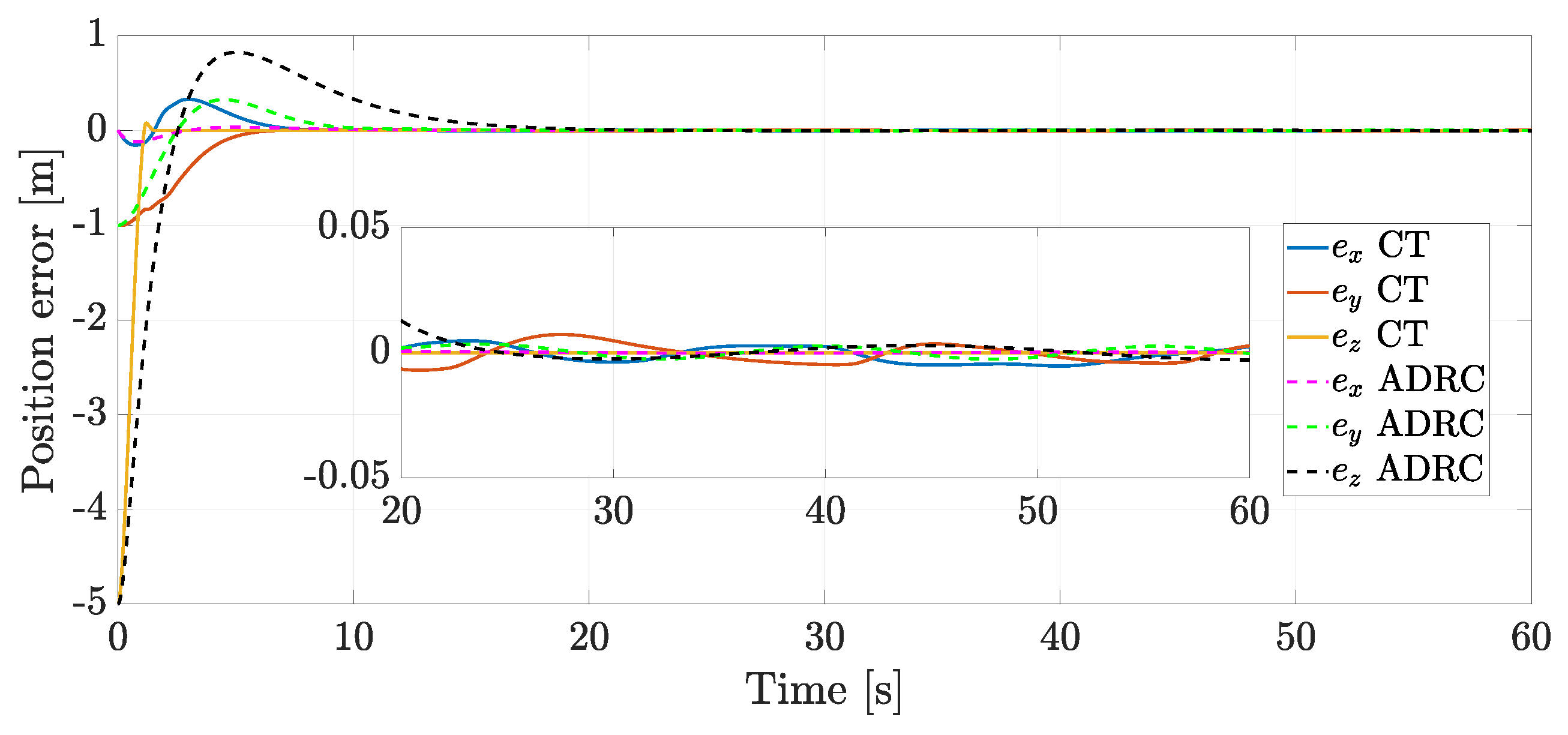
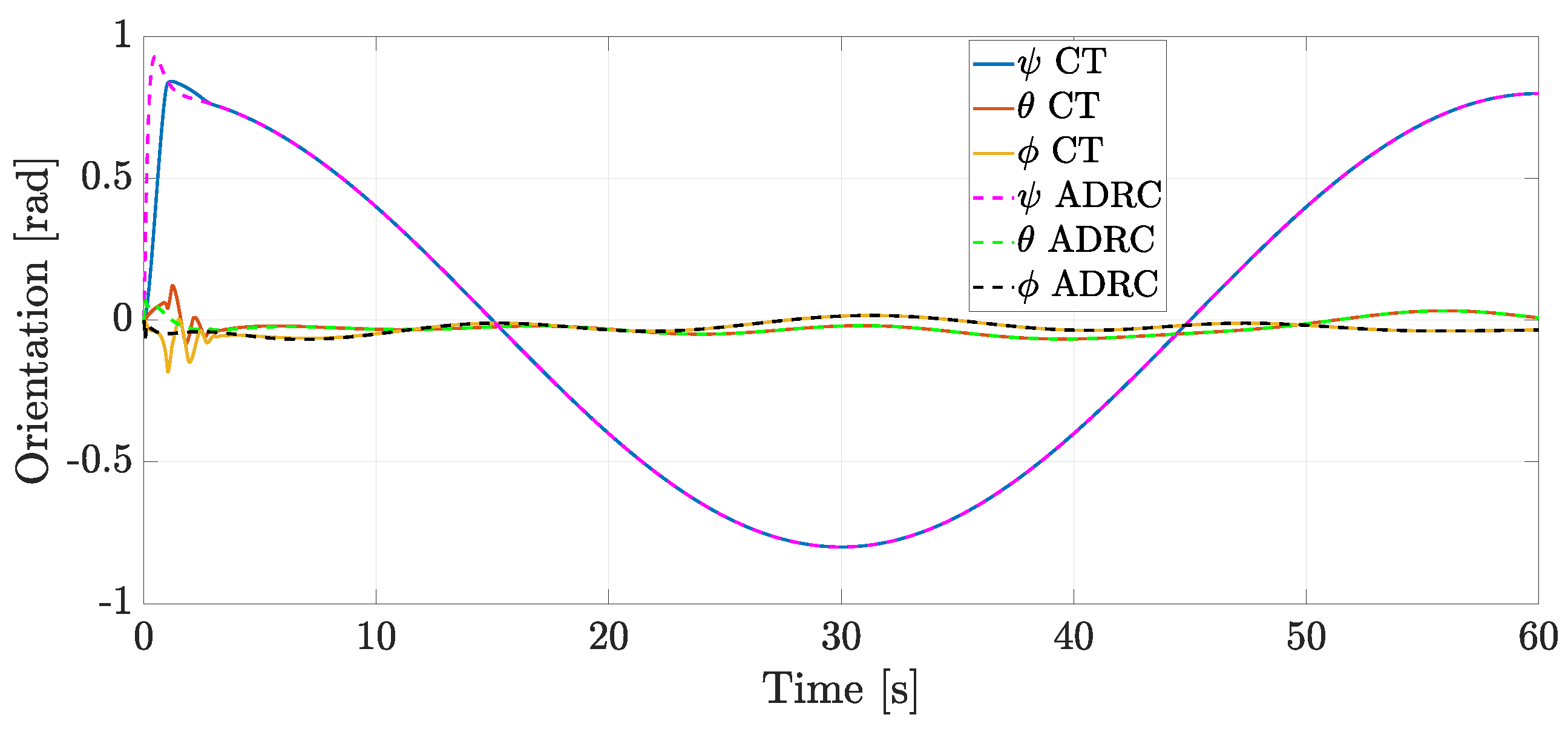
4.1. Numerical Simulations
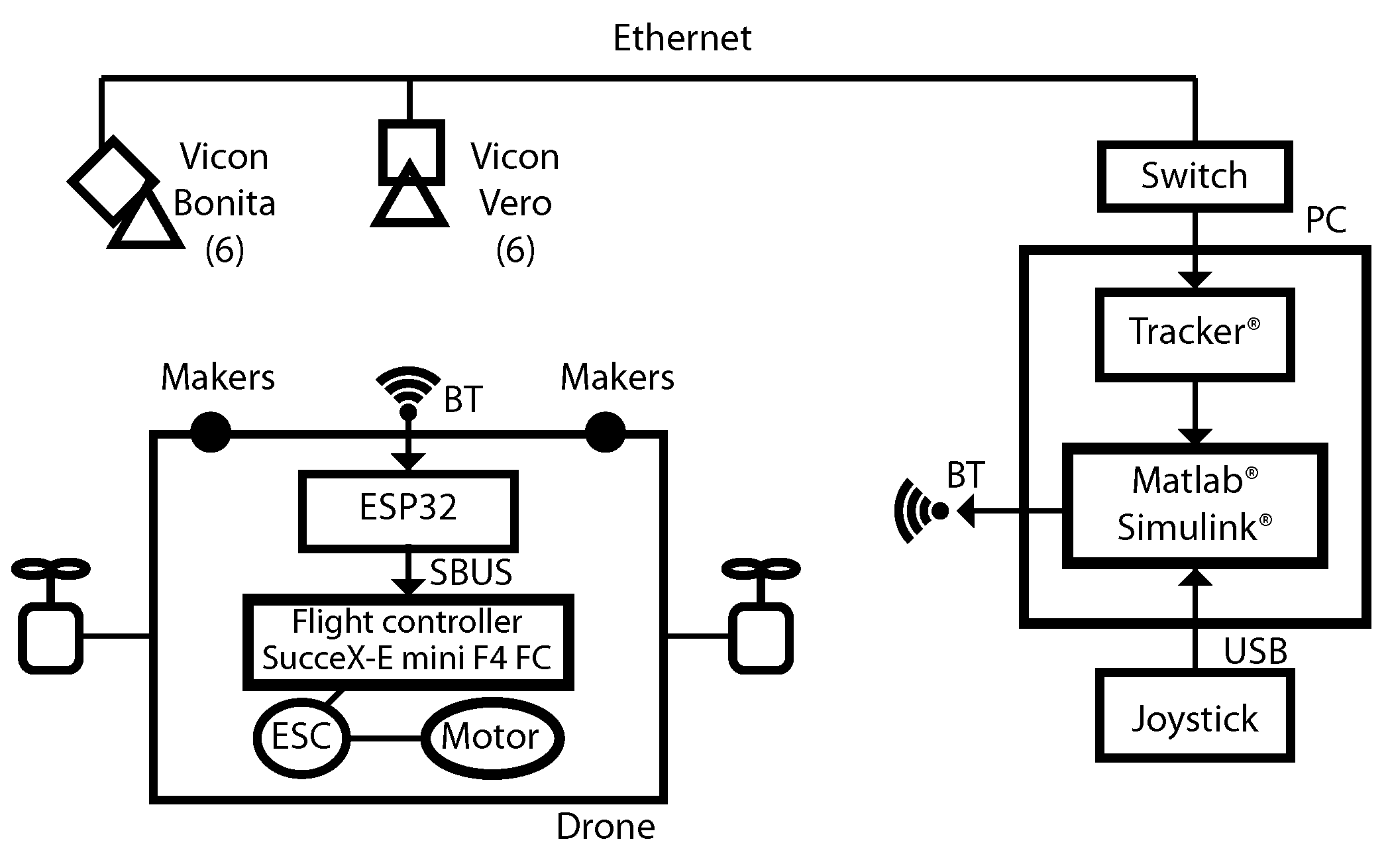
4.2. Real-Time Experiments
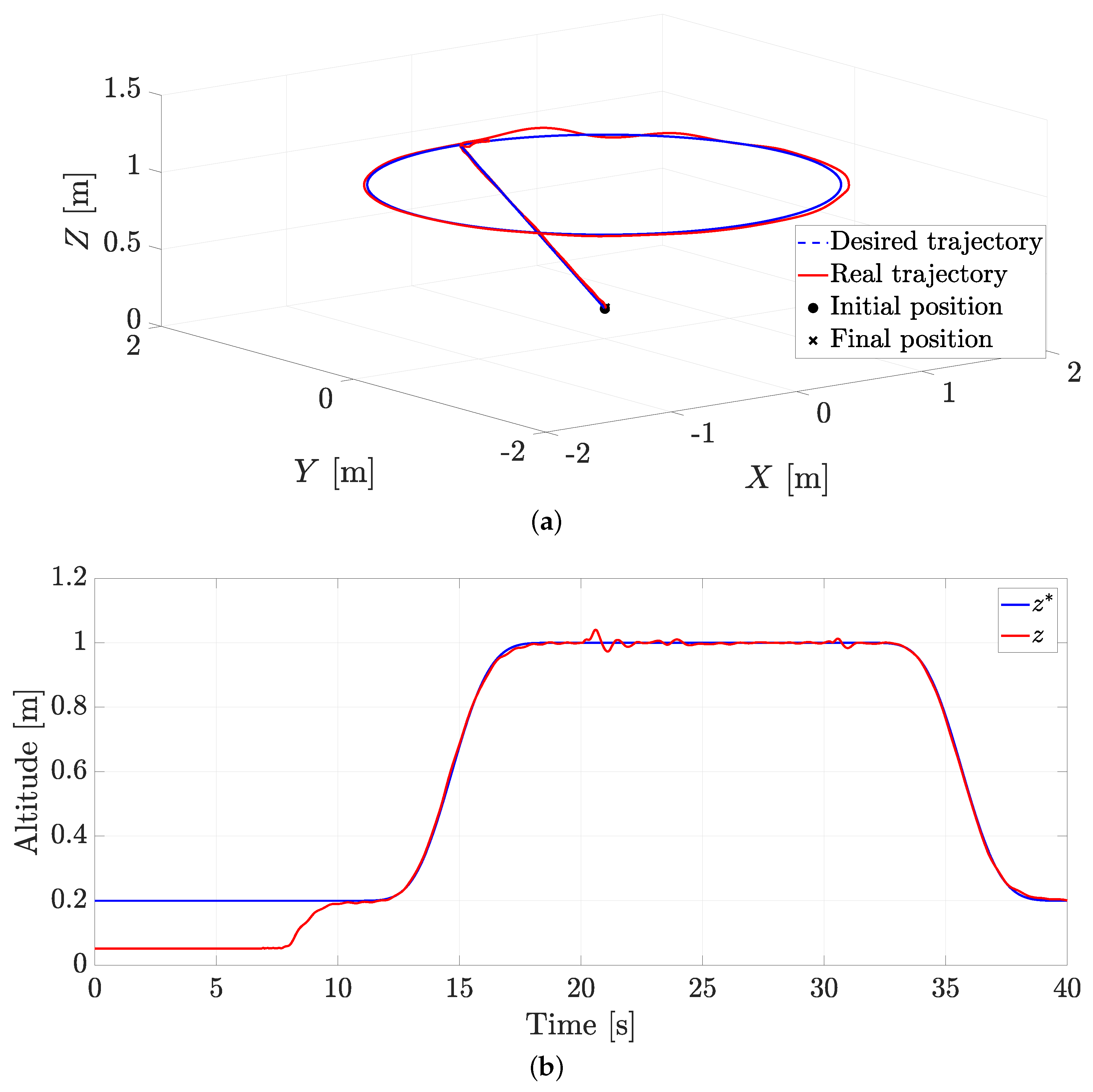
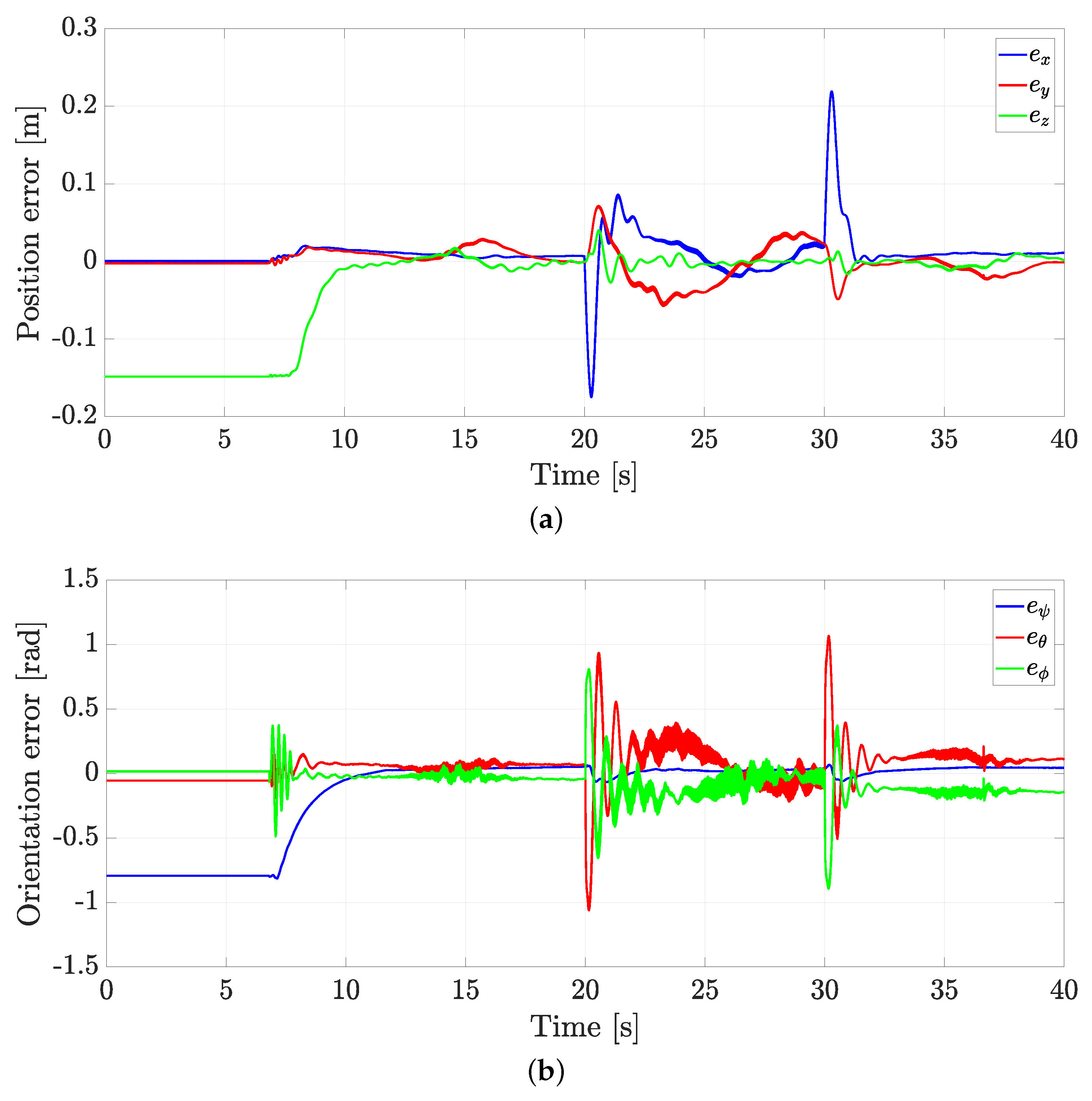
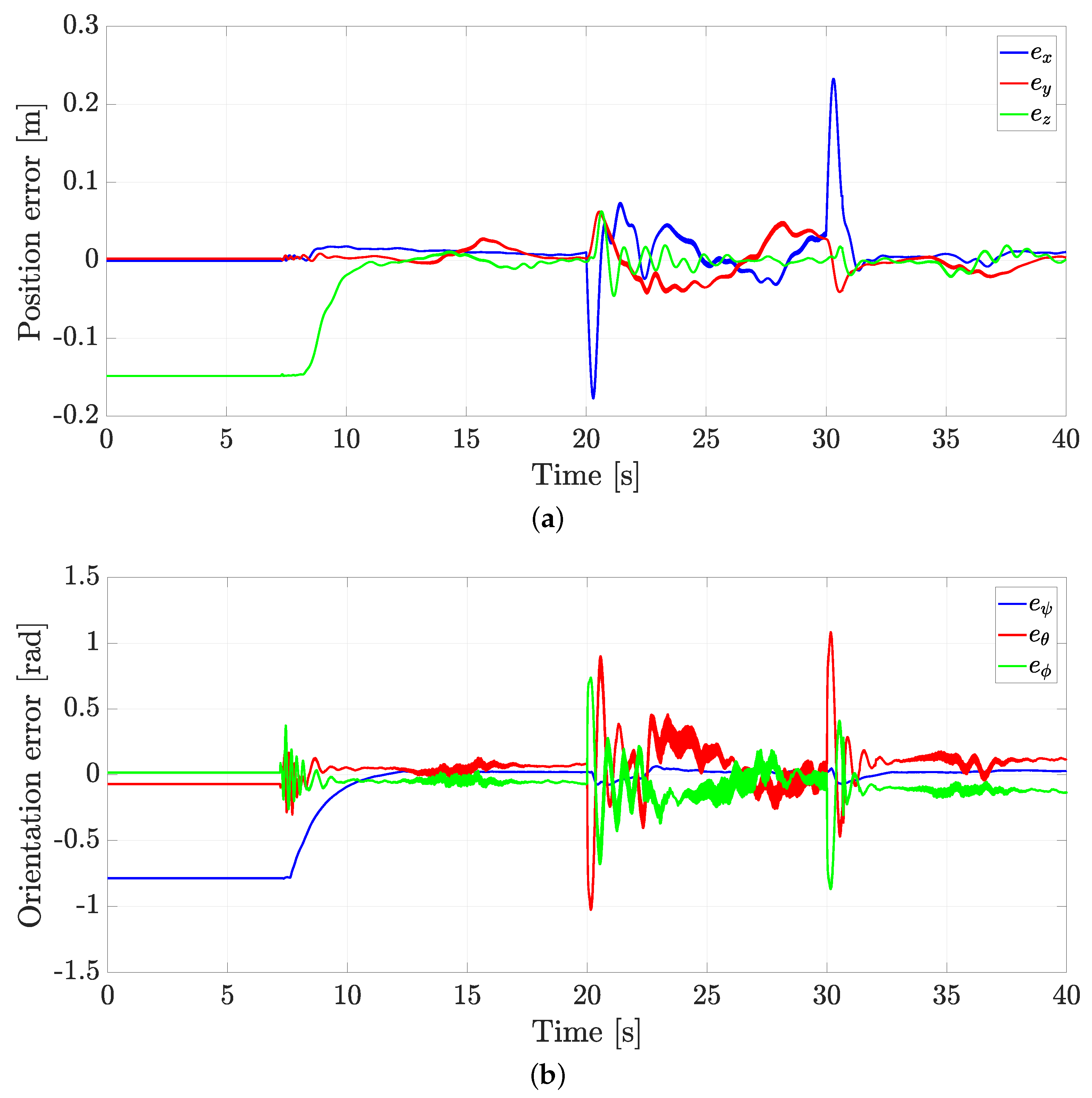
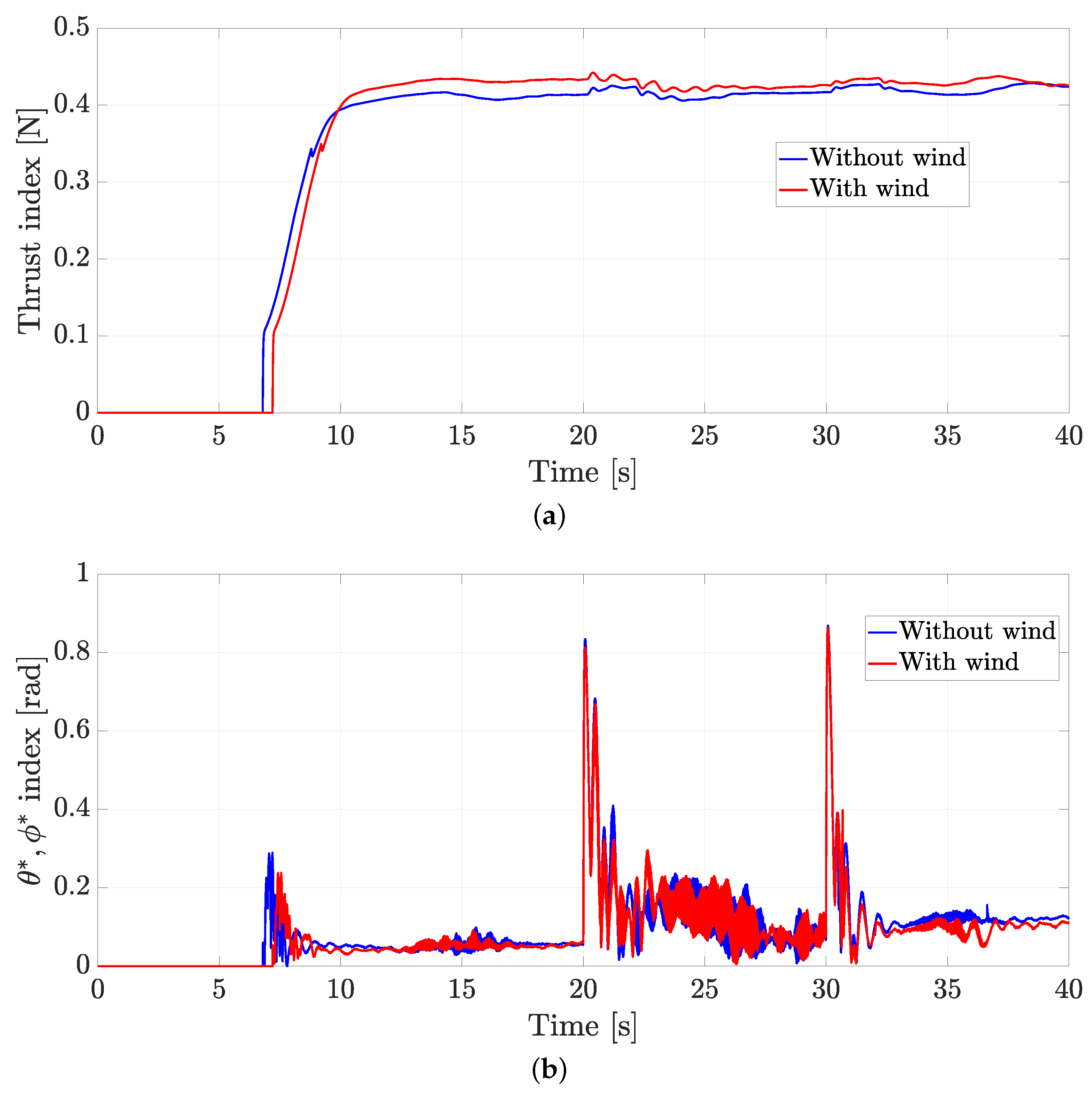
4.3. Experiment without External Disturbances
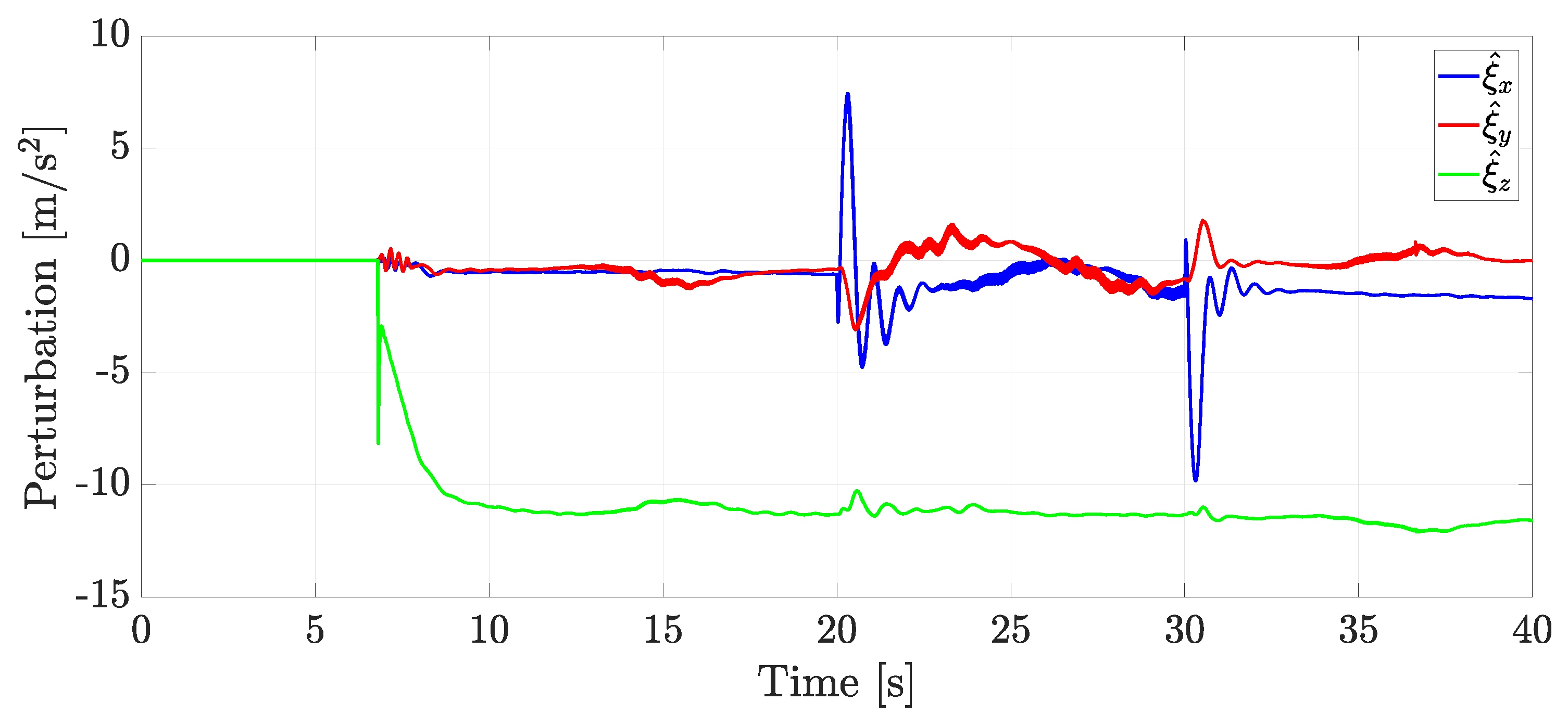
4.4. Experiment with Wind Applied as an External Disturbance
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| UAV | Unmanned Aerial Vehicles |
| ADRC | Active Disturbance Rejection Control |
| PID | Proportional-Integral-Differential |
| GPIO | Generalized Proportional Integral Observer |
| SMC | Sliding Mode Control |
| ESO | Extended State Observer |
| CT | Continuous Twisting |
References
- Erdelj, M.; Król, M.; Natalizio, E. Wireless Sensor Networks and Multi-UAV systems for natural disaster management. Comput. Netw. 2017, 124, 72–86. [Google Scholar] [CrossRef]
- Khalil, R.A.; Saeed, N.; Almutiry, M. UAVs-assisted passive source localization using robust TDOA ranging for search and rescue. ICT Express 2023, 9, 677–682. [Google Scholar] [CrossRef]
- Kedys, J.; Tchappi, I.; Najjar, A. UAVs for Disaster Management—An Exploratory Review. Procedia Comput. Sci. 2024, 231, 129–136. [Google Scholar] [CrossRef]
- Alsamhi, S.H.; Ma, O.; Ansari, M.S.; Almalki, F.A. Survey on Collaborative Smart Drones and Internet of Things for Improving Smartness of Smart Cities. IEEE Access 2019, 7, 128125–128152. [Google Scholar] [CrossRef]
- Lytridis, C.; Kaburlasos, V.G.; Pachidis, T.; Manios, M.; Vrochidou, E.; Kalampokas, T.; Chatzistamatis, S. An Overview of Cooperative Robotics in Agriculture. Agronomy 2021, 11, 1818. [Google Scholar] [CrossRef]
- Shelare, S.; Aglawe, K.; Waghmare, S.; Belkhode, P. Advances in water sample collections with a drone—A review. Mater. Today Proc. 2021, 47, 4490–4494. [Google Scholar] [CrossRef]
- Esposito, M.; Crimaldi, M.; Cirillo, V.; Sarghini, F.; Maggio, A. Drone and sensor technology for sustainable weed management: A review. Chem. Biol. Technol. Agric. 2021, 8, 18. [Google Scholar] [CrossRef]
- Kumar, A.; Sharma, K.; Singh, H.; Naugriya, S.; Gill, S.; Buyya, R. A drone-based networked system and methods for combating coronavirus disease (COVID-19) pandemic. Future Gener. Comput. Syst. 2021, 115, 1–19. [Google Scholar] [CrossRef]
- Nwaogu, J.M.; Yang, Y.; Chan, A.P.; Chi, H.l. Application of drones in the architecture, engineering, and construction (AEC) industry. Autom. Constr. 2023, 150, 104827. [Google Scholar] [CrossRef]
- Rojo-García, J.I.; Vera-Chavarría, S.A.; Lozano-Hernández, Y.; Sánchez-Meza, V.G.; González-Sierra, J.; Oliva-Moreno, L.N. Data Collection in Areas without Infrastructure Using LoRa Technology and a Quadrotor. Future Internet 2024, 16, 186. [Google Scholar] [CrossRef]
- Nascimento, T.P.; Saska, M. Position and attitude control of multi-rotor aerial vehicles: A survey. Annu. Rev. Control 2019, 48, 129–146. [Google Scholar] [CrossRef]
- Li, J.; Li, Y. Dynamic analysis and PID control for a quadrotor. In Proceedings of the 2011 IEEE International Conference on Mechatronics and Automation, Beijing, China, 7–10 August 2011; pp. 573–578. [Google Scholar] [CrossRef]
- Salih, A.; Moghavvemi, M.; Mohamed, H.; Gaeid, K. Modelling and PID controller design for a quadrotor unmanned air vehicle. In Proceedings of the International Conference on Automation, Quality and Testing, Robotics, Cluj-Napoca, Romania, 28–30 May 2010; Volume 1, pp. 1–5. [Google Scholar] [CrossRef]
- Carrillo, L.R.G.; López, A.E.D.; Lozano, R.; Pégard, C. Quad Rotorcraft Control: Vision-Based Hovering and Navigation; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Castillo, P.; Lozano, R.; Dzul, A. Stabilization of a mini rotorcraft with four rotors. IEEE Control Syst. Mag. 2005, 25, 45–55. [Google Scholar] [CrossRef]
- Ríos, H.; González-Sierra, J.; Dzul, A. Robust tracking output-control for a quad-rotor: A continuous sliding-mode approach. J. Frankl. Inst. 2017, 354, 6672–6691. [Google Scholar] [CrossRef]
- Nadda, S.; Swarup, A. On adaptive sliding mode control for improved quadrotor tracking. J. Vib. Control 2018, 24, 3219–3230. [Google Scholar] [CrossRef]
- Miranda-Moya, A.; Castañeda, H.; Wang, H. Fixed-Time Extended Observer-Based Adaptive Sliding Mode Control for a Quadrotor UAV under Severe Turbulent Wind. Drones 2023, 7, 700. [Google Scholar] [CrossRef]
- Shao, X.; Sun, G.; Yao, W.; Liu, J.; Wu, L. Adaptive Sliding Mode Control for Quadrotor UAVs with Input Saturation. IEEE/ASME Trans. Mechatron. 2022, 27, 1498–1509. [Google Scholar] [CrossRef]
- Baek, J.; Kang, M. A Synthesized Sliding-Mode Control for Attitude Trajectory Tracking of Quadrotor UAV Systems. IEEE/ASME Trans. Mechatron. 2023, 28, 2189–2199. [Google Scholar] [CrossRef]
- Kang, T.; Yoon, K.; Ha, T.; Lee, G. H-infinity Control System Design for a Quad-rotor. J. Inst. Control. Robot. Syst. 2015, 21, 14–20. [Google Scholar] [CrossRef]
- Ortiz, J.P.; Minchala, L.I.; Reinoso, M.J. Nonlinear Robust H-Infinity PID Controller for the Multivariable System Quadrotor. IEEE Lat. Am. Trans. 2016, 14, 1176–1183. [Google Scholar] [CrossRef]
- Labbadi, M.; Cherkaoui, M. Robust adaptive backstepping fast terminal sliding mode controller for uncertain quadrotor UAV. Aerosp. Sci. Technol. 2019, 93, 105306. [Google Scholar] [CrossRef]
- Almakhles, D.J. Robust Backstepping Sliding Mode Control for a Quadrotor Trajectory Tracking Application. IEEE Access 2020, 8, 5515–5525. [Google Scholar] [CrossRef]
- Tsai, S.H.; Chang, Y.P.; Lin, H.Y.; Chang, L.M. Design and Implementation of Integral Backstepping Sliding Mode Control for Quadrotor Trajectory Tracking. Processes 2021, 9, 1951. [Google Scholar] [CrossRef]
- Zhao, B.; Tang, Y.; Wu, C.; Du, W. Vision-Based Tracking Control of Quadrotor with Backstepping Sliding Mode Control. IEEE Access 2018, 6, 72439–72448. [Google Scholar] [CrossRef]
- Roy, R.; Islam, M.; Sadman, N.; Mahmud, M.A.P.; Gupta, K.D.; Ahsan, M.M. A Review on Comparative Remarks, Performance Evaluation and Improvement Strategies of Quadrotor Controllers. Technologies 2021, 9, 37. [Google Scholar] [CrossRef]
- Han, J. From PID to active disturbance rejection control. IEEE Trans. Ind. Electron. 2009, 56, 900–906. [Google Scholar] [CrossRef]
- Sira-Ramirez, H.; Luviano-Juárez, A.; Ramírez-Neria, M.; Zurita-Bustamante, E.W. Active Disturbance Rejection Control of Dynamic Systems: A Flatness Based Approach; Butterworth-Heinemann: Oxford, UK, 2017. [Google Scholar] [CrossRef]
- Borja-Jaimes, V.; Coronel-Escamilla, A.; Escobar-Jiménez, R.F.; Adam-Medina, M.; Guerrero-Ramírez, G.V.; Sánchez-Coronado, E.M.; García-Morales, J. Fractional-Order Sliding Mode Observer for Actuator Fault Estimation in a Quadrotor UAV. Mathematics 2024, 12, 1247. [Google Scholar] [CrossRef]
- Nian, X.; Chen, W.; Chu, X.; Xu, Z. Robust adaptive fault estimation and fault tolerant control for quadrotor attitude systems. Int. J. Control 2020, 93, 725–737. [Google Scholar] [CrossRef]
- Gao, B.; Liu, Y.J.; Liu, L. Adaptive neural fault-tolerant control of a quadrotor UAV via fast terminal sliding mode. Aerosp. Sci. Technol. 2022, 129, 107818. [Google Scholar] [CrossRef]
- Xu, L.; Qin, K.; Tang, F.; Shi, M.; Lin, B. A Novel Attitude Control Strategy for a Quadrotor Drone with Actuator Dynamics Based on a High-Order Sliding Mode Disturbance Observer. Drones 2024, 8, 131. [Google Scholar] [CrossRef]
- Dhadekar, D.; Sanghani, P.; Mangrulkar, K.; Talole, S. Robust Control of Quadrotor using Uncertainty and Disturbance Estimation. J. Intell. Robot. Syst. 2021, 101, 60. [Google Scholar] [CrossRef]
- Huang, Y.; Liu, W.; Li, B.; Yang, Y.; Xiao, B. Finite-time formation tracking control with collision avoidance for quadrotor UAVs. J. Frankl. Inst. 2020, 357, 4034–4058. [Google Scholar] [CrossRef]
- González-Sierra, J.; Dzul, A.; Ríos, H. Robust sliding-mode formation control and collision avoidance via repulsive vector fields for a group of Quad-Rotors. Int. J. Syst. Sci. 2019, 50, 1483–1500. [Google Scholar] [CrossRef]
- Xu, L.X.; Ma, H.J.; Guo, D.; Xie, A.H.; Song, D.L. Backstepping Sliding-Mode and Cascade Active Disturbance Rejection Control for a Quadrotor UAV. IEEE/ASME Trans. Mechatron. 2020, 25, 2743–2753. [Google Scholar] [CrossRef]
- Xiyang, W.; Mingqiu, L.; Yang, Y.; Hongtao, D. Quadrotor Flight Control Based on Improved Active Disturbance Rejection Control Technology. J. Phys. Conf. Ser. 2021, 1948, 012095. [Google Scholar] [CrossRef]
- AlAli, A.; Fareh, R.; Sinan, S.; Bettayeb, M. Control of Quadcopter Drone Based on Fractional Active Disturbances Rejection Control. In Proceedings of the 2021 14th International Conference on Developments in eSystems Engineering (DeSE), Sharjah, United Arab Emirates, 7–10 December 2021; pp. 180–185. [Google Scholar] [CrossRef]
- Orozco Soto, S.M.; Cacace, J.; Ruggiero, F.; Lippiello, V. Active Disturbance Rejection Control for the Robust Flight of a Passively Tilted Hexarotor. Drones 2022, 6, 258. [Google Scholar] [CrossRef]
- Wang, Z.; Huang, D.; Huang, T.; Qin, N. Active disturbance rejection control for a quadrotor UAV. In Proceedings of the 2020 IEEE 9th Data Driven Control and Learning Systems Conference (DDCLS), Liuzhou, China, 19–21 June 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Suhail, S.A.; Bazaz, M.A.; Hussain, S. Adaptive sliding mode-based active disturbance rejection control for a quadcopter. Trans. Inst. Meas. Control 2022, 44, 3176–3190. [Google Scholar] [CrossRef]
- Chang, K.; Xia, Y.; Huang, K.; Ma, D. Obstacle avoidance and active disturbance rejection control for a quadrotor. Neurocomputing 2016, 190, 60–69. [Google Scholar] [CrossRef]
- Dong, W.; Gu, G.Y.; Zhu, X.; Ding, H. A high-performance flight control approach for quadrotors using a modified active disturbance rejection technique. Robot. Auton. Syst. 2016, 83, 177–187. [Google Scholar] [CrossRef]
- Díaz-Téllez, J.; Guerrero-Castellanos, J.F.; Pouthier, F.; Marchand, N.; Durand, S. In-Ground-Effect Disturbance-Rejection Altitude Control for Multi-Rotor UAVs. J. Intell. Robot. Syst. 2023, 109, 1–18. [Google Scholar] [CrossRef]
- Fliess, M.; Lévine, J.; Martin, P.; Rouchon, P. Flatness and defect of non-linear systems: Introductory theory and examples. Int. J. Control 1995, 61, 1327–1361. [Google Scholar] [CrossRef]
- Sira-Ramirez, H.; Agrawal, S.K. Differentially Flat Systems; CRC Press: Boca Raton, FL, USA, 2004. [Google Scholar]
- Aguilar-Ibáñez, C.; Sira-Ramírez, H.; Suárez-Castañón, M.S.; Martínez-Navarro, E.; Moreno-Armendariz, M.A. The trajectory tracking problem for an unmanned four-rotor system: Flatness-Based approach. Int. J. Control 2012, 85, 69–77. [Google Scholar] [CrossRef]
- Martinez-Vasquez, A.H.; Castro-Linares, R.; Rodríguez-Mata, A.E.; Sira-Ramírez, H. Spherical Inverted Pendulum on a Quadrotor UAV: A Flatness and Discontinuous Extended State Observer Approach. Machines 2023, 11, 578. [Google Scholar] [CrossRef]
- Castillo, P.; Lozano, R.; Dzul, A.E. Modelling and Control of Mini-Flying Machines; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2005. [Google Scholar]
- Sira-Ramírez, H.; Ramírez-Neria, M.; Rodríguez-Angeles, A. On the linear control of nonlinear mechanical systems. In Proceedings of the 49th IEEE Conference on Decision and Control (CDC), Atlanta, GA, USA, 15–17 December 2010; pp. 1999–2004. [Google Scholar]
- Lopez-Sanchez, I.; Moreno-Valenzuela, J. PID control of quadrotor UAVs: A survey. Annu. Rev. Control 2023, 56, 100900. [Google Scholar] [CrossRef]
- Fliess, M.; Join, C. Model-free control. Int. J. Control 2013, 86, 2228–2252. [Google Scholar] [CrossRef]
- Huba, M.; Gao, Z. Uncovering disturbance observer and ultra-local plant models in series PI controllers. Symmetry 2022, 14, 640. [Google Scholar] [CrossRef]
- Ramírez-Neria, M.; Morales-Valdez, J.; Yu, W. Active vibration control of building structure using active disturbance rejection control. J. Vib. Control 2022, 28, 2171–2186. [Google Scholar] [CrossRef]
- Gao, Z. Scaling and bandwidth-parameterization based controller tuning. Proc. Am. Control Conf. 2003, 6, 4989–4996. [Google Scholar] [CrossRef]
- Kim, Y.; Keel, L.; Bhattacharyya, S. Transient response control via characteristic ratio assignment. IEEE Trans. Autom. Control 2003, 48, 2238–2244. [Google Scholar] [CrossRef]
- Wu, Z.H.; Zhou, H.C.; Guo, B.Z.; Deng, F. Review and new theoretical perspectives on active disturbance rejection control for uncertain finite-dimensional and infinite-dimensional systems. Nonlinear Dyn. 2020, 101, 935–959. [Google Scholar] [CrossRef]
- Qi, S.; Zhe, J. UKF based two-timescale control for a helicopter. In Proceedings of the 2016 14th International Conference on Control, Automation, Robotics and Vision (ICARCV), Phuket, Thailand, 13–15 November 2016; IEEE: New York, NY, USA, 2016; pp. 1–5. [Google Scholar] [CrossRef]
- González-Sierra, J.; Ríos, H.; Dzul, A. Quad-Rotor robust time-varying formation control: A Continuous Sliding-Mode Control approach. Int. J. Control 2020, 93, 1659–1676. [Google Scholar] [CrossRef]
- L’Afflitto, A. Control Multiple AR.Drone 2.0 with Vicon Feedback. MATLAB Central File Exchange. 2022. Available online: https://www.mathworks.com/matlabcentral/fileexchange/63026-control-multiple-ar-drone-2-0-with-vicon-feedback (accessed on 2 September 2024.).






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Distance [m] | Velocity [m/s] |
|---|---|
| 1 | |
| 5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ramírez-Neria, M.; Luviano-Juárez, A.; González-Sierra, J.; Ramírez-Juárez, R.; Aguerrebere, J.; Hernandez-Martinez, E.G. Active Disturbance Rejection Control for the Trajectory Tracking of a Quadrotor. Actuators 2024, 13, 340. https://doi.org/10.3390/act13090340
Ramírez-Neria M, Luviano-Juárez A, González-Sierra J, Ramírez-Juárez R, Aguerrebere J, Hernandez-Martinez EG. Active Disturbance Rejection Control for the Trajectory Tracking of a Quadrotor. Actuators. 2024; 13(9):340. https://doi.org/10.3390/act13090340
Chicago/Turabian StyleRamírez-Neria, Mario, Alberto Luviano-Juárez, Jaime González-Sierra, Rodrigo Ramírez-Juárez, Joaquín Aguerrebere, and Eduardo G. Hernandez-Martinez. 2024. "Active Disturbance Rejection Control for the Trajectory Tracking of a Quadrotor" Actuators 13, no. 9: 340. https://doi.org/10.3390/act13090340
APA StyleRamírez-Neria, M., Luviano-Juárez, A., González-Sierra, J., Ramírez-Juárez, R., Aguerrebere, J., & Hernandez-Martinez, E. G. (2024). Active Disturbance Rejection Control for the Trajectory Tracking of a Quadrotor. Actuators, 13(9), 340. https://doi.org/10.3390/act13090340