Abstract
During the operation of maglev trains, they are subjected to various disturbances. The presence of these disturbances presents a significant challenge for attaining high-performance control and even poses the risk of system instability. To further enhance the anti-disturbance capability of maglev trains, this paper proposes a model information-assisted modified active disturbance rejection control (MADRC) approach. A mathematical model of the single-point suspension system of maglev trains is constructed for the design of the extended state observer (ESO), which is a modified extended state observer (MESO), and a nonlinear mechanism is incorporated to boost the performance of the ESO. Owing to the introduction of model information, the estimated quantity of disturbances by MESO no longer considers the system model deviation as a disturbance. Hence, the linear feedback control law is modified accordingly. The MESO is regarded as an ESO with time-varying gain using the equivalent gain method, and its stability is proven using the Lyapunov method. The tracking and anti-disturbance performances of different controllers are compared via simulation experiments. Suspension and anti-disturbance experiments are conducted on the single-point suspension experimental platform, verifying that the proposed MADRC has a more potent suppression ability for load disturbances in the suspension system.
1. Introduction
Maglev trains, as a typical representative of new rail transit technologies, primarily rely on a suspension system that actively controls the generation of time-varying electromagnetic forces, allowing the train to stably levitate above the track. Compared to traditional wheeled trains, maglev trains present several advantages, including the absence of mechanical contact wear, high operational speeds, strong adaptability to varied terrains, and environmental friendliness. However, maglev trains are classified as open-loop unstable systems, characterized by significant nonlinear properties and susceptibility to external disturbances, making control challenging [1,2]. Nonetheless, as a mode of transportation, the commercial operation of maglev trains demands stringent safety standards throughout the operational process. This necessitates that the control performance of the controller remains at a high level, requiring robust handling of external disturbances and system uncertainties. Therefore, research on control algorithms for maglev trains is of paramount importance.
Active Disturbance Rejection Controller (ADRC) was originally proposed by Han [3]. Due to its features of fast response, low overshoot, and strong disturbance rejection capability, it has been widely applied in engineering practice [4,5,6,7]. The fundamental idea of ADRC is to use an Extended State Observer (ESO) to uniformly observe and compensate for system uncertainties and external disturbances. The strong disturbance rejection and good robustness of ADRC make it suitable for the control of maglev trains. However, maglev trains exhibit non-minimum phase (NMP) characteristics, the internal loop of the system is unstable because it has positive roots. And there is no definitive correspondence between the system’s amplitude-frequency characteristics and phase-frequency characteristics. For minimum phase systems, a larger bandwidth of the ESO is beneficial for the stability and dynamic performance of the system; this situation is not applicable to the control of non-minimum phase systems, which makes it challenging for traditional ADRC structures to achieve a balance between system stability and control performance. Zhao [8] has proven that the standard ADRC controller based on the relative order design for non-minimum phase systems is likely to be unstable. A common approach to applying ADRC to non-minimum phase systems is to take model information into account by constructing a state space model of the system and utilizing it into the design of the ESO. Xue [9] have studied the selection of the standard form and stability conditions for NMP disturbance rejection systems. Sun [10] designed a control structure that combines feedforward control with an improved ADRC specifically for non-minimum phase systems, replacing the conventional series integral standard form with a known nominal model and designing an improved ESO based on this, so that the uncertain object’s characteristics in the low-frequency range approach those of the nominal model. Liu [11] obtained explicit expressions for internal disturbances through the reconstruction of non-minimum phase systems, designing a new ADRC control structure and deriving internal stability criteria for disturbance rejection systems. These studies indicate that the design of the ESO based on model information is effective for ADRC control of NMP systems.
In order to simplify the structure of the ADRC and make parameter tuning easier, Gao [12] linearized the Extended State Observer and feedback control law, making linear ADRC (LADRC) more suitable for engineering applications. The linear ESO has a simple structure, with a defined relationship between gain and observer bandwidth, facilitating easy parameter tuning; however, the high constant gain may lead to a ‘peaking’ problem in the system [13]. The nonlinear mechanism has unique advantages in improving the estimation efficiency of the Extended State Observer and achieving high accuracy and disturbance rejection capabilities [14,15]. Nevertheless, when the disturbance magnitude is large, the gain becomes very small, resulting in a significant decline in observer performance. Therefore, to enhance observation performance, it is possible to combine the advantages of linear and nonlinear mechanisms to improve the disturbance rejection capability and response speed of ADRC. Xu [16] proposed a switched Extended State Observer to achieve rapid and high-precision estimation of force, realizing a control strategy without force sensors.
Considering the non-minimum phase characteristics of magnetic levitation trains and unknown external disturbances, a modified ADRC strategy is proposed based on a linear ADRC framework. This strategy integrates model information and nonlinear mechanisms into the design of the Extended State Observer (ESO) to achieve high-performance control for magnetic levitation trains. The main contributions are as follows:
(1) On the basis of the LADRC control framework, the model information of the maglev train is used for the design of the ESO, and the linear feedback control law is changed accordingly for the MESO. On this basis, the stability analysis of the MESO is carried out.
(2) A simulation model of the single-point suspension system is built, and it is verified that the modified ADRC not only makes the recovery process more stable and faster, but also optimizes the steady-state performance. Comparative experiments were carried out on the actual single-point suspension system test bench. The results show that under load disturbance, compared with PID and traditional LADRC, the modified ADRC has better transient recovery process and steady-state performance (smaller adjustment time and lower integral absolute error).
This paper is organized as follows: In Section 2, the mathematical model of the single-point suspension system for magnetic levitation trains is established, and its non-minimum phase characteristics are analyzed. Section 3 presents the structure of the modified ADRC strategy and proposes an modified ESO based on model information for estimating external disturbances. The equivalent gain method is used to convert the linear and nonlinear structures into a unified form, and the stability of the ESO is proven using the Lyapunov criterion. In Section 4, a simulation model of the single-point suspension system is constructed, and a comparison is made among the transient responses, steady-state characteristics, and disturbance rejection capabilities of the systems under PID, LADRC, and modified ADRC control. Section 5 validates static levitation and disturbance resistance experiments on the single-point suspension system testbed. Finally, Section 6 concludes the paper.
2. Modeling and Problem Description
2.1. Single-Point Suspension System Model
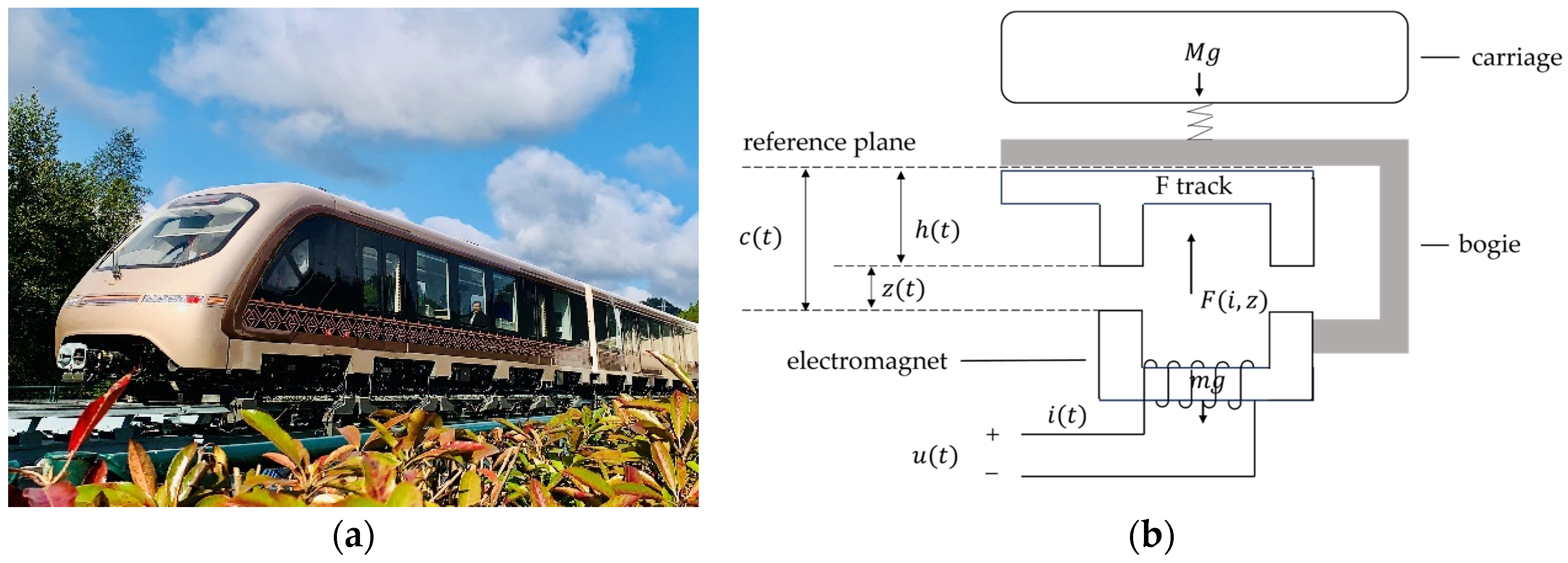
Taking the train of the Hunan Fenghuang Maglev Operating Line as the object. Each carriage of the train is furnished with five bogies, and the bogies are linked to the carriage via air springs. Each bogie encompasses two electromagnet modules on the left and right. The train achieves the decoupling of the suspension points on both sides through the bogie, thus the suspension single point is typically regarded as the research object of the suspension control system [17,18]. The simplified model is depicted in Figure 1.
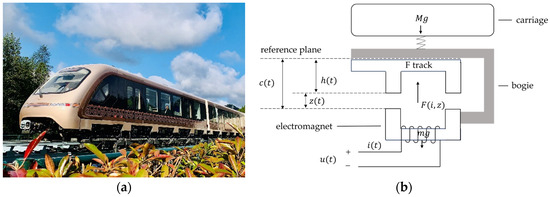
Figure 1.
Modeling of suspension system of magnetic train; (a) The magnetic levitation operation line located in Fenghuang, Hunan Province; (b) The model of the single-point suspension control system.
In Figure 1b, represents the displacement of the track relative to the reference surface, indicates the displacement of the electromagnet relative to the reference surface, denotes the gap between the electromagnet and the track, stands for the equivalent mass of the carriage, represents the equivalent mass of the electromagnet, represents the electromagnetic force, represents the disturbing force, represents the control voltage applied across the control coil.
Suppose that the magnetic flux leakage and the magnetic resistance of the guide rail, iron core, and polar plate are disregarded, and it is assumed that the geometric center of the electromagnet coincides with the center of mass, the levitation force is concentrated at the geometric center, and the electromagnet has only vertical movement relative to the track. Then, the single-point levitation system can be determined by the following equations [19,20]:
where, represents the coil impedance, represents the number of turns of the coil winding, represents the effective magnetic pole area of the electromagnet, and represents the vacuum permeability. Define the constant term in Formula (1) as the coefficient , that is .
The formula for the electromagnetic force is linearized in the vicinity of the equilibrium point (, ), and the dynamic equation of the system can be depicted by Equation (2). At the equilibrium point, the electromagnetic force is counterbalanced by the gravitational force [21].
Define the coefficients as ,.
Take the state variables , , subsequently, the state space equation of the system is presented as
where, ,.
It can be clearly known that the single-point suspension system belongs to a second-order non-minimum phase system. The standard ADRC control structure is difficult to effectively control the non-minimum phase system. To solve the control problem of the non-minimum phase, common methods include applying model information to the design of the extended state observer, and further optimizing the control performance on this basis, avoiding the “peak” phenomenon caused by the constant gain in the extended state observer. A nonlinear interval is introduced on the basis of the linear extended state observer to enhance the performance of ESO in estimating states and disturbances.
2.2. Fundamentals of LADRC
LADRC linearizes the state feedback and the extended state observer, and simplifies the parameter tuning of the state feedback and LESO respectively to the selection of the controller bandwidth and the observer bandwidth. For the second-order controlled object presented in Equation (4), LADRC regards the sum of the object uncertainty and the external disturbance as the “total disturbance”: , and then Equation (4) is expressed as:
According to the above formula, expand the disturbance into a new state variable to obtain the expanded linear system, and then establish a state observer for the expanded system to design the LESO [22]:
The linear feedback control law is:
where, represents the adjustable gain, , , and denote the estimations of the system state and total disturbance, and , and stand for the gain coefficients of the observer.
3. Modified ADRC Scheme
3.1. MESO Design Scheme
By expanding the disturbance as a new state variable from the state space Equation (3), the third-order expansion system is derived:
Provided that the model information is known, use system state space parameters for observer design, and replace the observer gain with a nonlinear function . The conventional LESO can be modified as follows to obtain MESO:
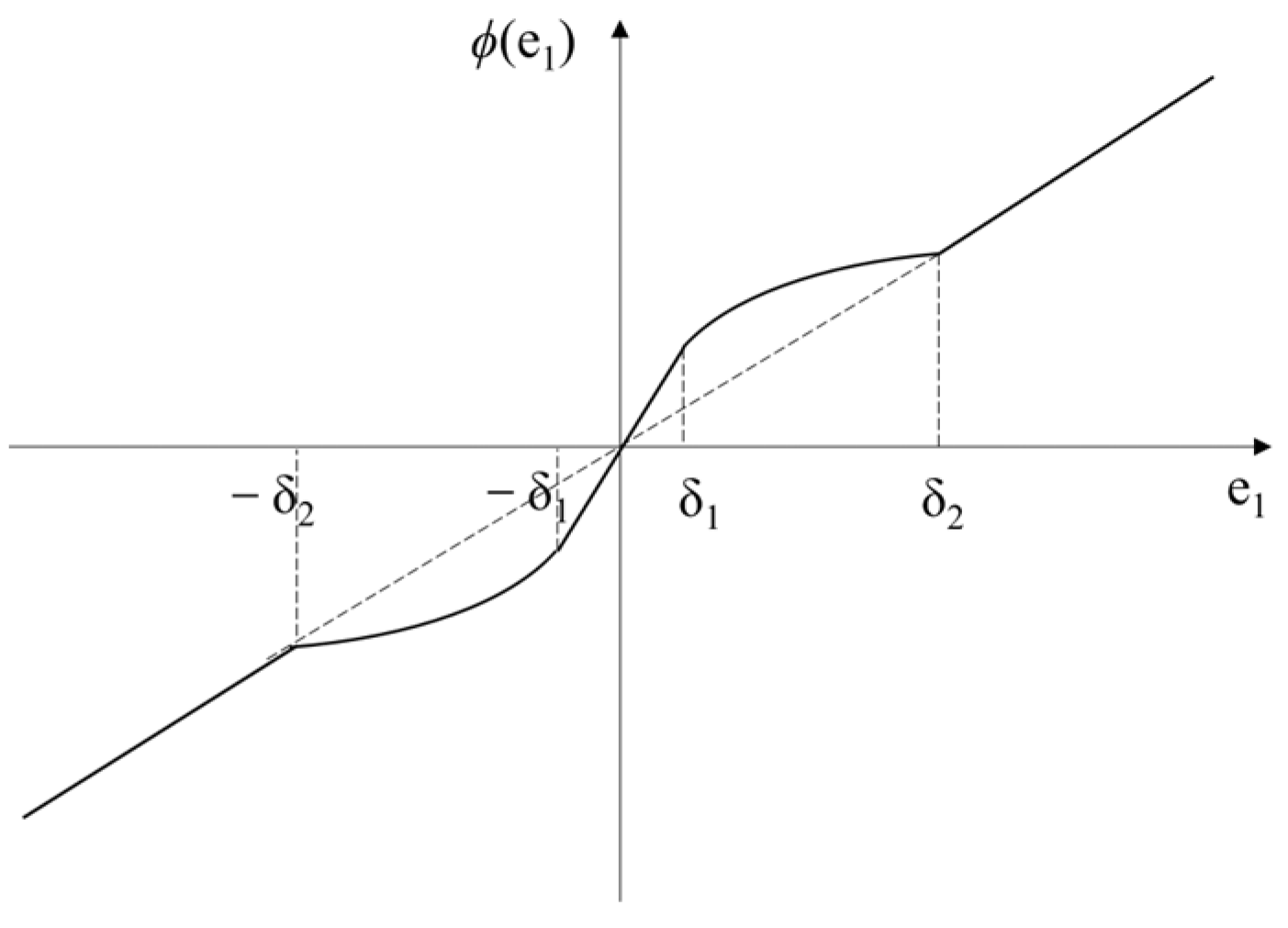
where the nonlinear function is computed by Formula (9).
where, represents the length of the linear segment interval, serves as the critical value for the transition between LESO and NLESO, and it fulfills the condition of ; is an adjustable parameter, and it fulfills the condition of .
And it is presented in Figure 2.
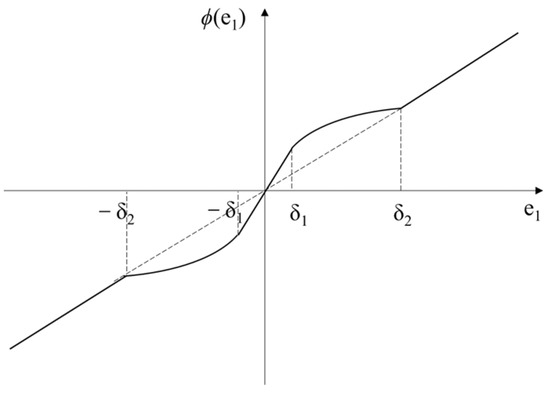
Figure 2.
The schematic diagram of the function .
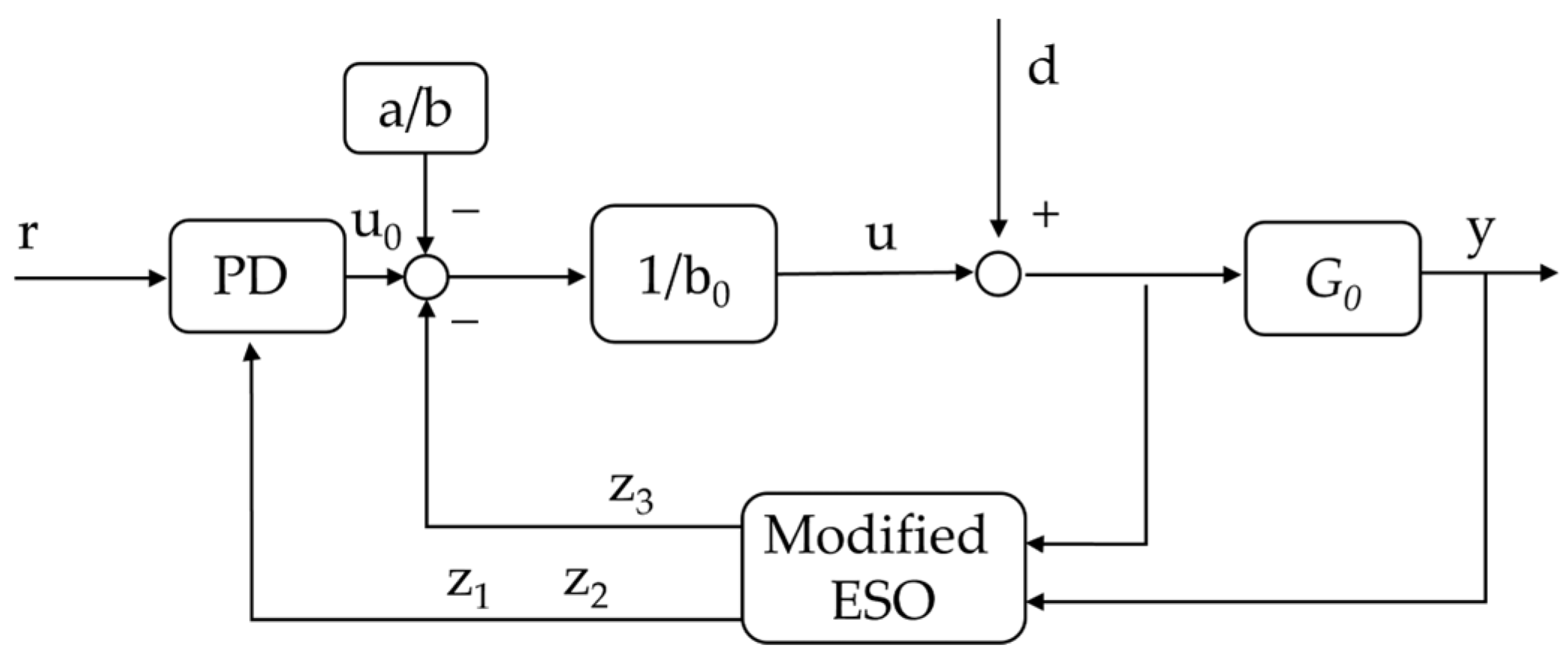
Based on the MESO design, linear feedback is conducted by utilizing the estimated states and , and compensation is implemented with the disturbance state estimator . Owing to the introduction of model information, the model-related component should also be incorporated into the compensation amount. The control law is presented as shown in the Formula (10).
The control framework of MADRC is depicted in Figure 3.
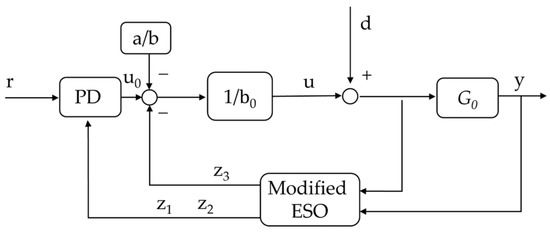
Figure 3.
Modified ADRC scheme based on model of the plant.
3.2. Stability Analysis of MESO
Employ the equivalent gain approach and let
Assuming that the initial state error is zero and there is no external disturbance, the MESO can be regarded as having a variable gain structure, and the extended state observer presented in Equation (8) can be rewritten as:
By subtracting Equation (12) from Equation (7), the state equation of the system error can thereby be derived as:
where, , , , , ;
Suppose that the total perturbation is bounded: , the stability of the error system is determined by .
The theory presented in reference [23] provides the sufficient conditions for the exponential ultimate boundedness of the error system. Given positive numbers ,assume that there exist positive definite matrices , and satisfying the following relationship:
Eventually, the error system converges exponentially.
where, , , The values and are respectively the minimum eigenvalue and the maximum eigenvalue of P.
4. Simulation Experiments
The operation process of the maglev train encompasses four working conditions: levitation initiation, static suspension, inter-station journey, and train touchdown. The value of the suspension gap typically ranges from 0 to 15 mm. When the train lands, the car body is supported by the track, and there is no control effect at this point. The gap remains at 15 mm. When the train attains steady-state suspension, the gap is 8 mm. During the train operation, the gap fluctuates approximately around 8 mm. It is anticipated that a high-performing controller can stably suspend at the desired gap and fulfill the following requirements: (1) The system possesses a rapid response speed and a minor overshoot; (2) It demonstrates excellent adaptability to the uncertainty and time-varying nature of the parameters in the suspension system; (3) It exhibits a superior ability to suppress external disturbances. To verify the performance superiority of the control algorithm in comparison with the traditional PID and ADRC controllers, a simulation model of the single-point suspension system is constructed based on the system given in Formula (1) for experiments and analysis.
4.1. Design of Controller
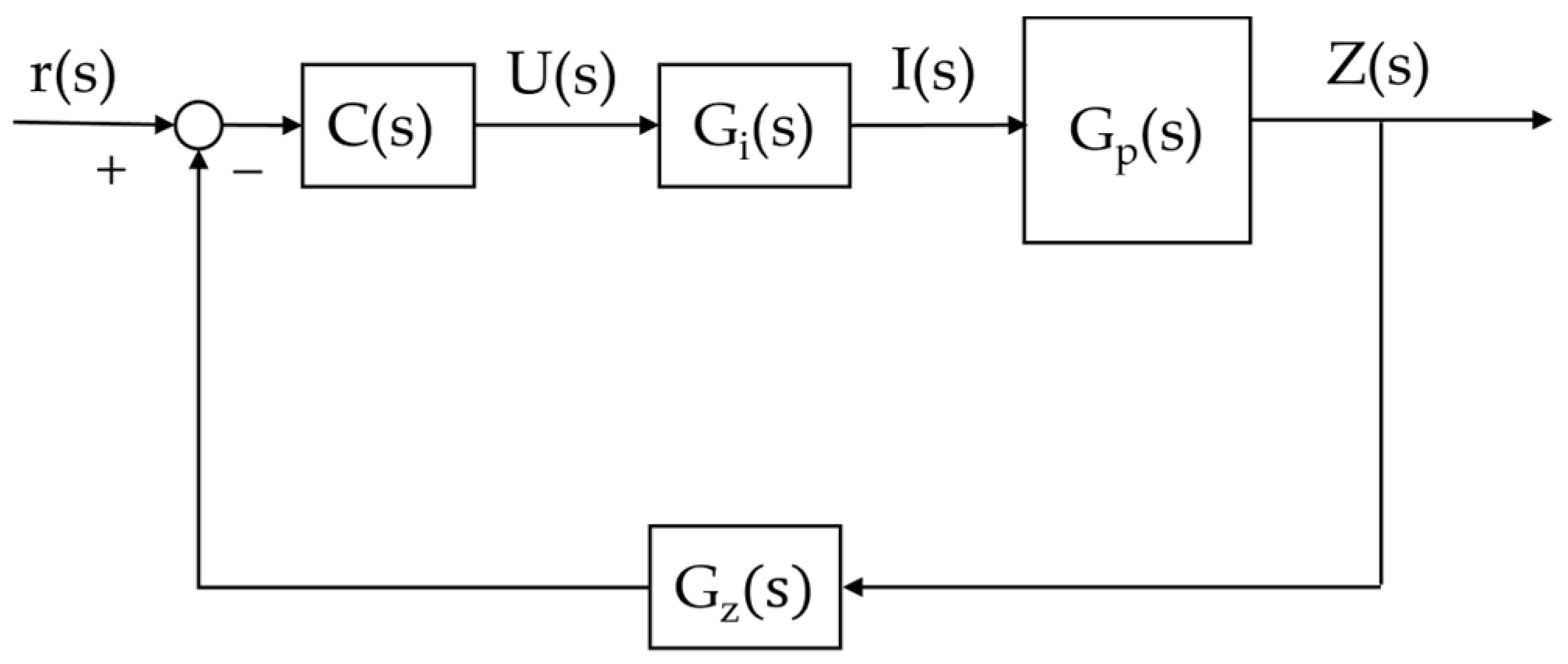
For the design of the general control framework of this controlled object, as depicted in Figure 4. Herein, represents the reference input signal, denotes the control quantity, stands for the control current, is the output, refers to the controller, is the transfer function of the current loop, and is the transfer function of the displacement sensor.
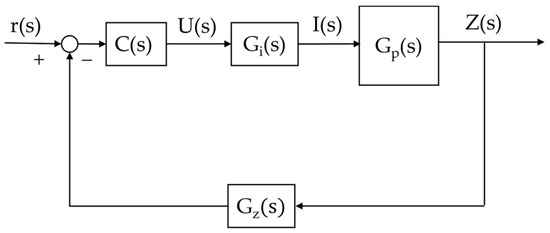
Figure 4.
The general control scheme of the single-point suspension system.
The bandwidth of the displacement sensor is extremely high and is characterized by the proportional link.
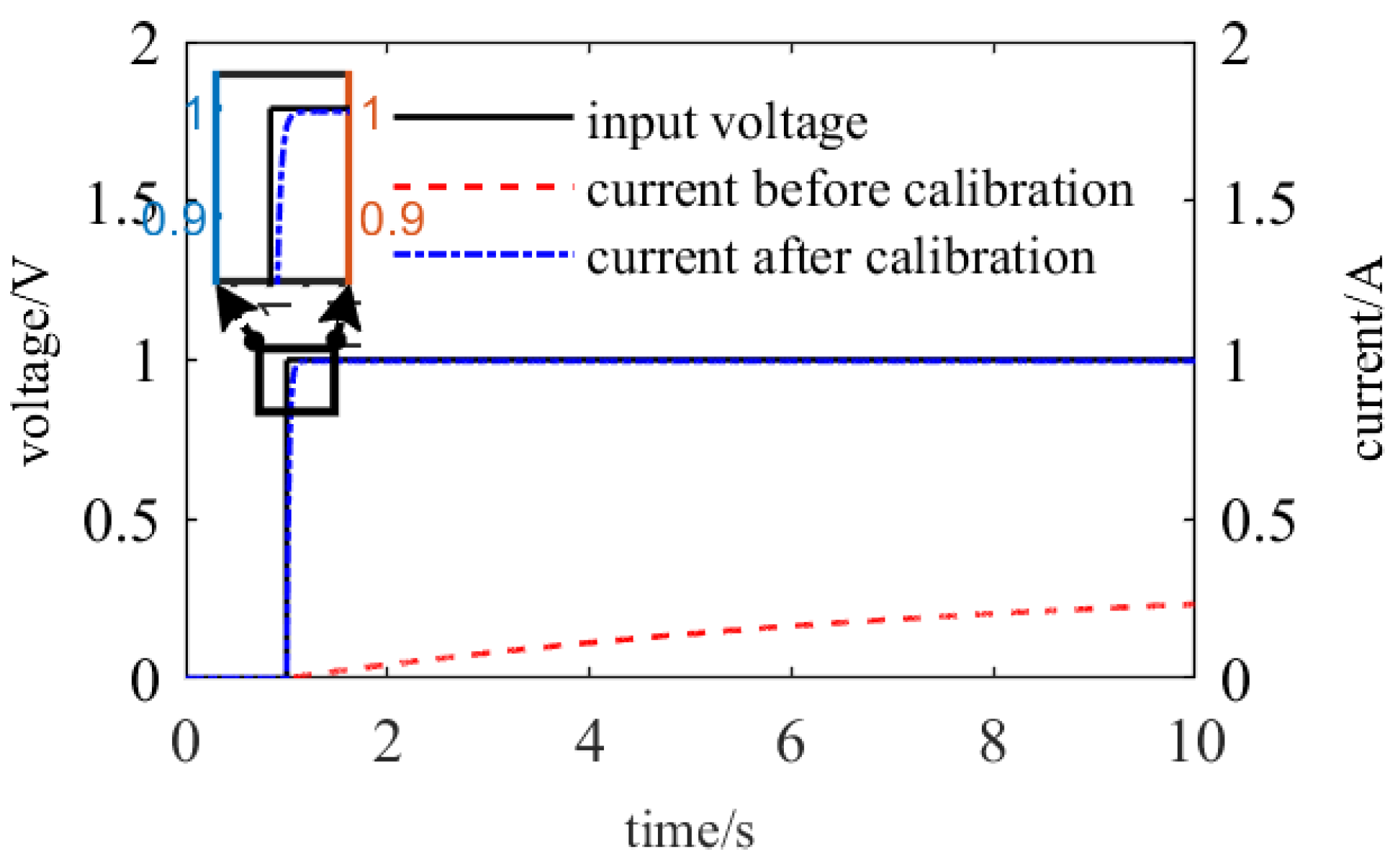
Owing to the hysteresis property of the electromagnet, a time delay exists between the control voltage and the control current. This property will result in an untimely response of the electromagnetic force to the control signal, thereby influencing the control performance and even giving rise to the risk of instability in the control system. The time delay can be eliminated by the design of the current loop, and the structure of the current loop is presented as
After the introduction of the current loop, the time lag between the control current and the control voltage can be eliminated through parameter adjustment, and the current can rapidly track the input voltage, as depicted in Figure 5. The electromagnet can be approximated as a proportional link with a gain of 1 within the main response frequency band of the system. Hence, the current signal can be approximately regarded as the control quantity.
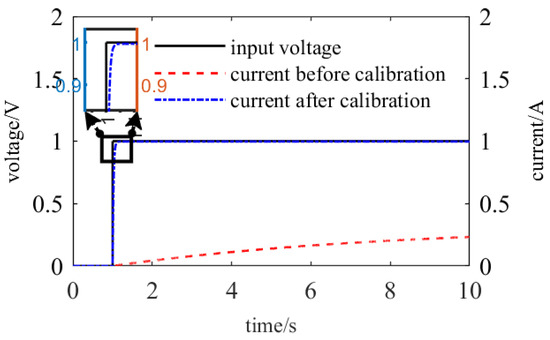
Figure 5.
The current output before and after the correction using the current loop.
Three controllers were devised, and their parameters were adjusted for the optimal performance respectively: PID controller {, , }; Regarding the tuning of ADRC, typically, as the bandwidth of the observer rises, the controller’s suppression effect on disturbances improves. Nevertheless, the system is inevitably influenced by noise during actual operation. As the bandwidth increases, the impact of measurement noise will be magnified. Hence, the selection of the observer bandwidth should strike a balance between the disturbance observation ability and the measurement noise suppression ability. According to the bandwidth tuning approach proposed in Literature [12], the gain coefficient of LESO and the observer bandwidth fulfill the following relationship: ; Choose parameters for LADRC controller as {, , , }; Choose parameters for MADRC controller as {, , , , , , }.
4.2. Analysis of Tracking Performance
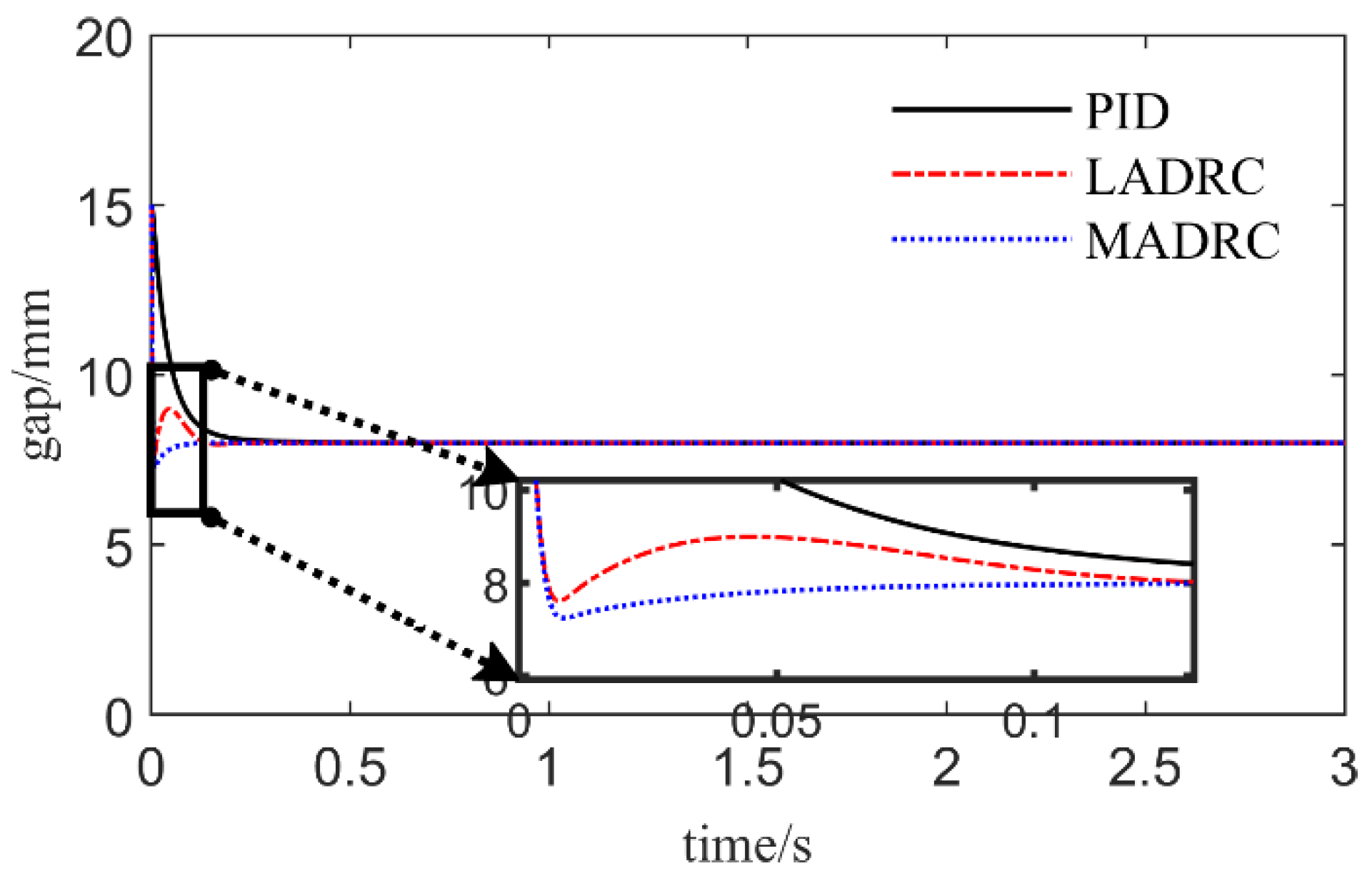
The initial gap of the single-point suspension system is set at 15 mm, and the anticipated steady-state suspension gap is 8 mm. Figure 6 presents the gap response curves under the governance of three controllers. Under the circumstance of well-tuned parameters, it can be observed that:
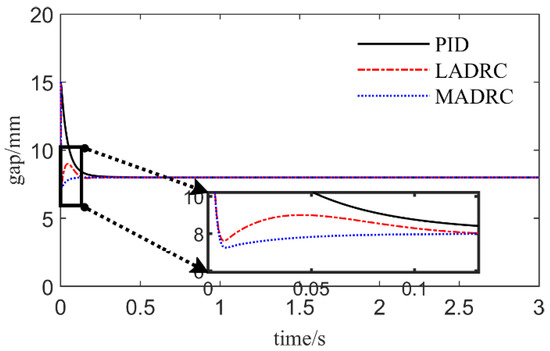
Figure 6.
Comparison of step response.
(1) The system response curve under PID control exhibits no overshoot, yet the adjustment time is considerably longer than those of the two ADRC control strategies;
(2) The system adjustment time under LADRC control is the shortest, but the oscillation is the most pronounced;
(3) The system adjustment time under MADRC control is equivalent to that of the LADRC controller, but the response curve is relatively smooth, and it smoothly transits to the expected gap after a slight overshoot.
Consequently, it can be concluded that the MADRC controller reduces the system adjustment time and renders the system transition process more gentle compared to the LADRC controller.
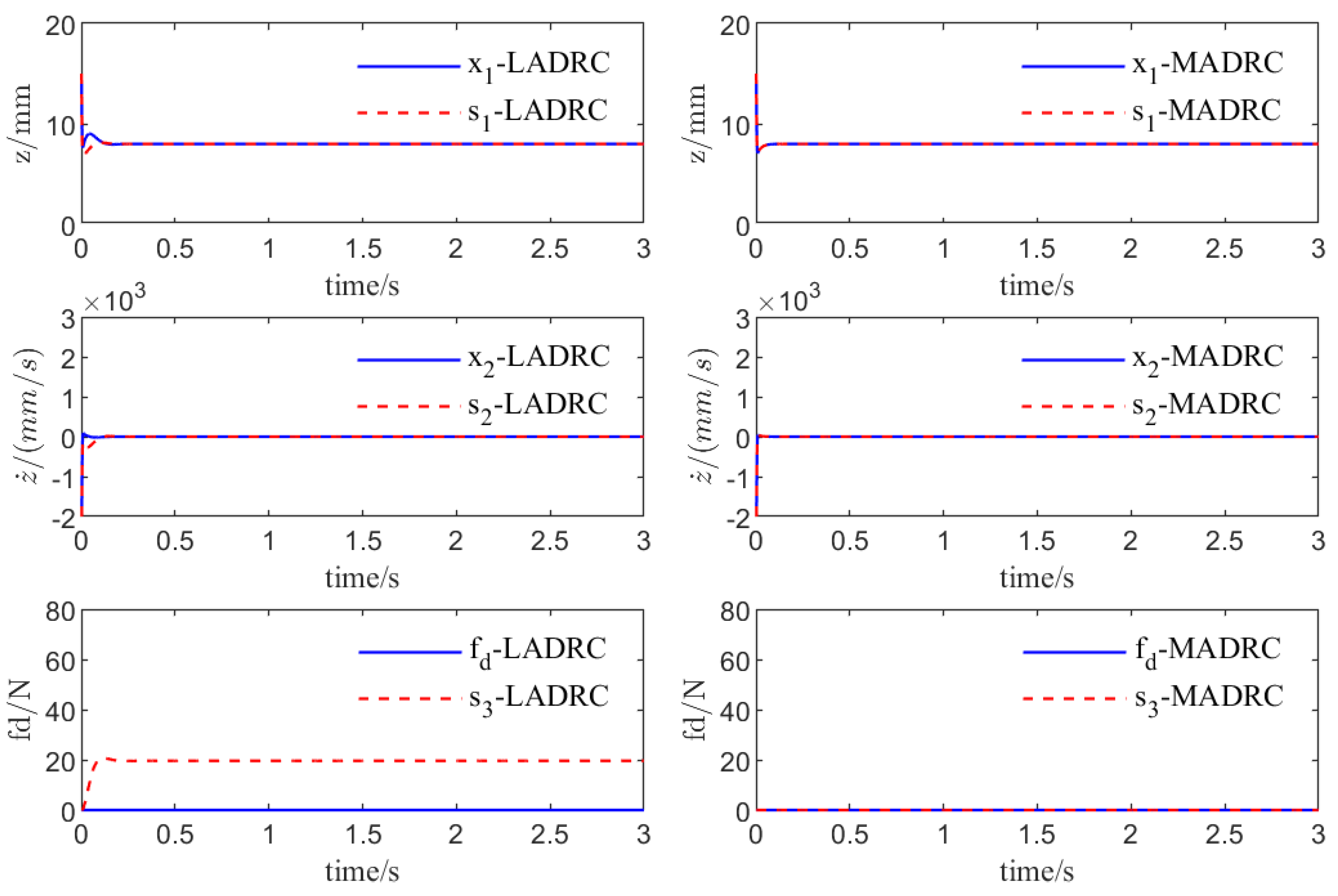
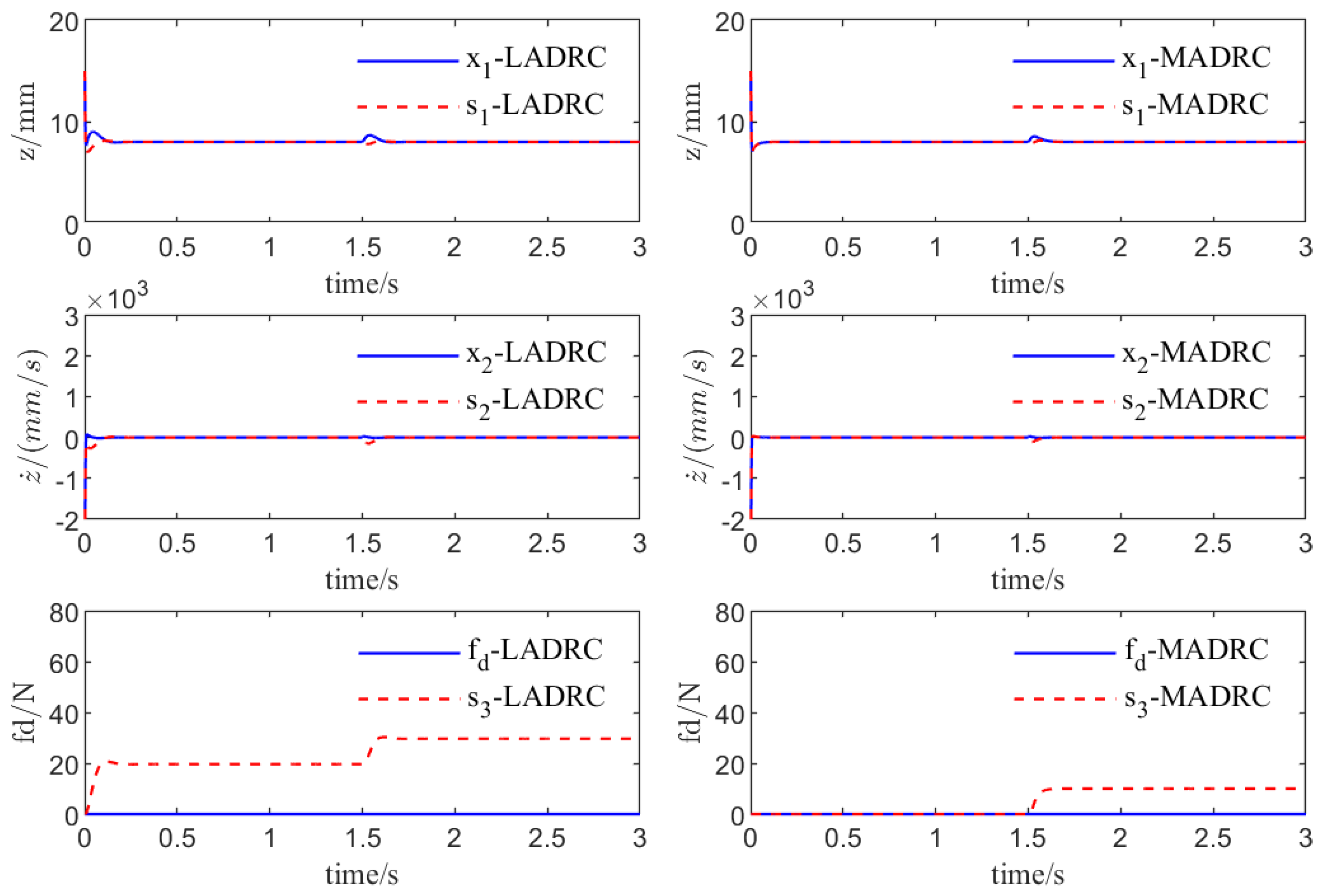
Figure 7 presents the estimation of the system state and disturbance by ESO under two types of ADRC control. In Figure 7, , and represent system state variables, which are the suspend gap, the derivative of the gap, and the expansion state variable, respectively. Meanwhile, , and represent the ESO’s estimations of the system state variables , and , respectively. The same goes for Figure 9. It is conspicuously evident that MESO possesses a higher-precision and faster estimation capability for the system state (gap) and (derivative of the gap). Simultaneously, it can be observed that the ESO which does not utilize the model information will estimate the deviation between the actual model and the standard model as a part of the disturbance, which undoubtedly augments the observation burden of ESO.
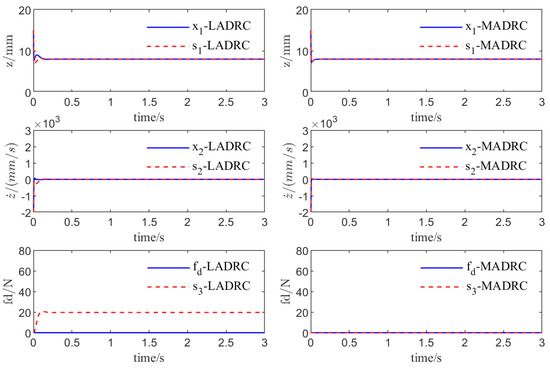
Figure 7.
Observation of ESO under step response.
4.3. Analysis of Anti-Disturbance Capacity
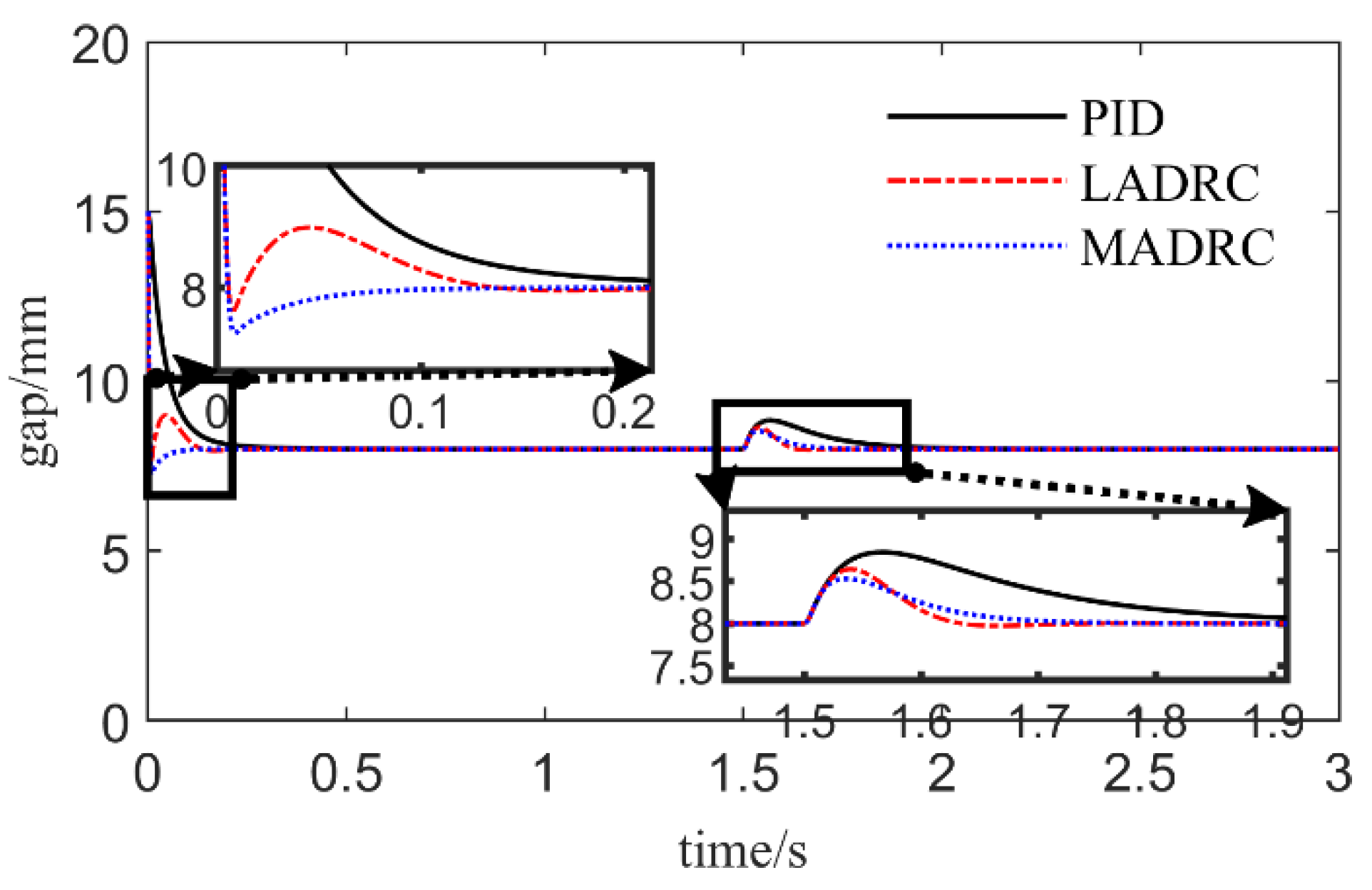
To validate the suppression capacity of the MADRC control scheme regarding load disturbances, a step disturbance with an amplitude of 10 N was introduced, and the gap variance between the electromagnet and the track is depicted in Figure 8. By comparing the alterations of the gap fluctuations, the subsequent conclusions can be drawn:
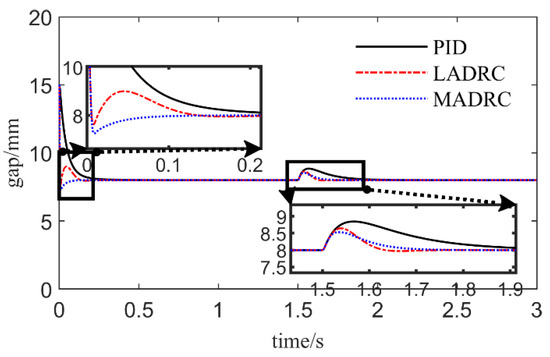
Figure 8.
Comparison of the dynamic response of the system upon perturbation.
(1) When exposed to load step disturbances of the same magnitude, the peak size relationship of the gap variation is: MADRC < LADRC < PID. This implies that MADRC possesses a more potent anti-interference capability than the LADRC and PID controllers and can handle the impacts brought about by variations in the external environment more effectively.
(2) The adjustment time of MADRC and LADRC is notably superior to that of the PID controller. By comparing the performance of distinct controllers upon perturbation, it can be observed that MADRC has a milder dynamic response compared to LADRC, which further substantiates that MADRC has the most excellent transient response characteristics during the perturbation.
Hence, in a system demanding stable and efficient suppression of perturbation and rapid and precise adjustment time, selecting the MADRC control strategy is a dependable choice.
Figure 9 depicts the estimation of the system state and disturbance via the ESO under two types of ADRC control. The MESO possesses a higher-precision and faster estimation capability for the system state and can precisely estimate the external disturbance.
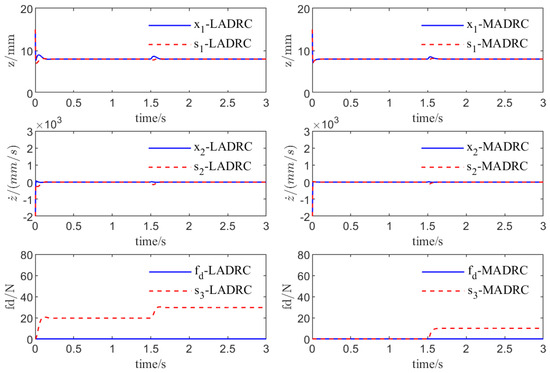
Figure 9.
Observation of ESO under the dynamic response of the system upon perturbation.
The error integral index employs the integral form of the deviation value between the actual output data and the set output data to represent the performance of the system. The smaller the error integral index is, the better the control performance of the system will be. Commonly utilized ones encompass the Integral of Absolute Error (IAE) and the Integral of Squared Error (ISE). The IAE index has an excellent reflection on the accumulation of small deviations in the system output. The smaller its value is, the better the damping and transient response characteristics of the system will be. The ISE index can reflect the large deviation and response speed of the system output more effectively and is associated with the energy consumption of the system. The smaller its value is, the lower the consumption will be. The error integral indices of the system under different controllers are calculated respectively, as shown in the Table 1.

Table 1.
The error integral index during step response and dynamic response upon perturbation.
5. Experiment
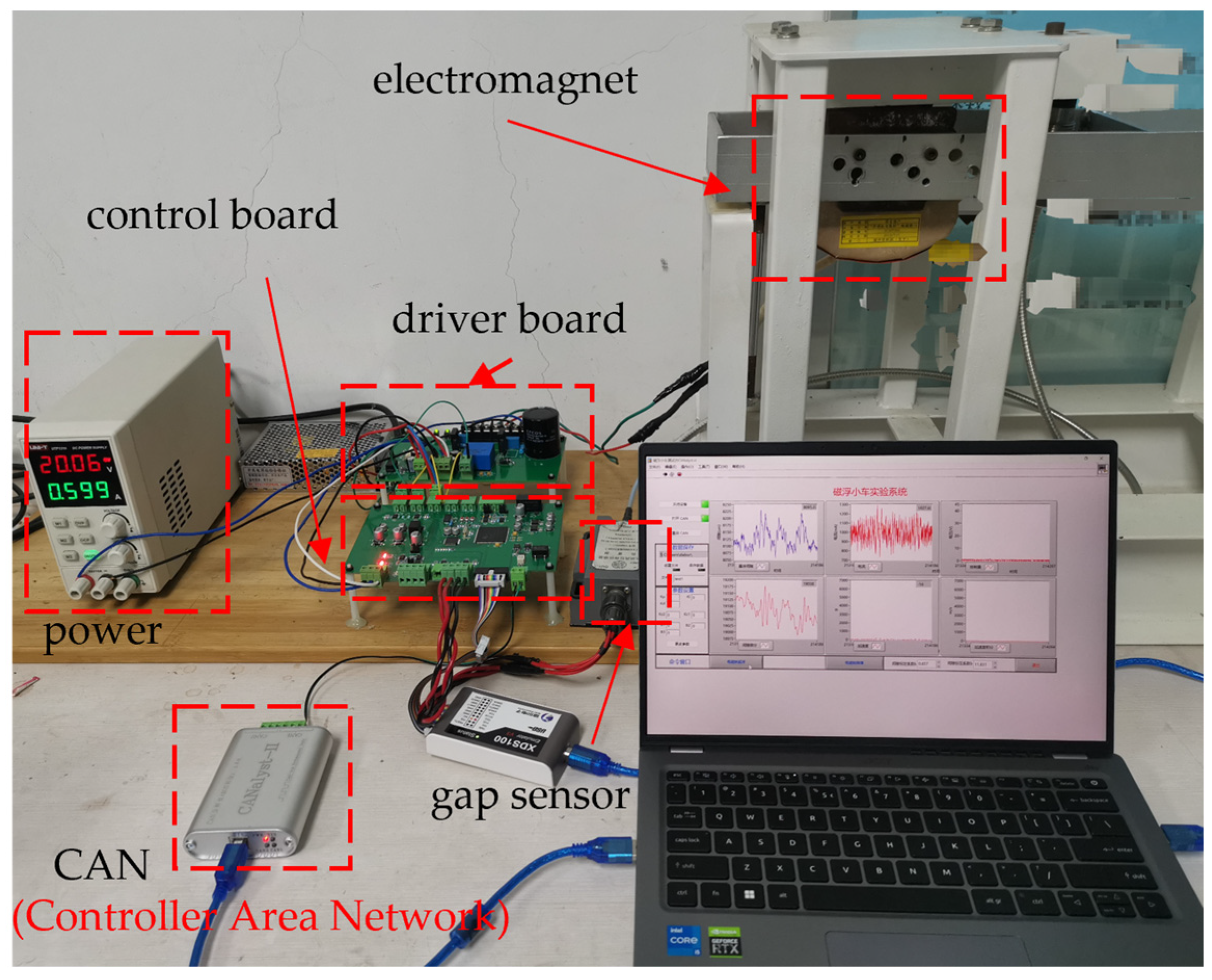
The experimental platform of the single-point suspension system is depicted in the Figure 10. The framework of the control system encompasses electromagnet, gap sensor, control circuits, and power amplifier circuits. A specific current passing through the winding of the electromagnet will engender electromagnetic force. In the suspension system experiment, the DSP control board is utilized to generate PWM waves as the control signal. After the chopping circuit amplifies the signal, a control voltage is applied across both ends of the electromagnet to generate an actively controllable electromagnetic force, thereby enabling the electromagnetic force to be balanced with the gravity of the load.
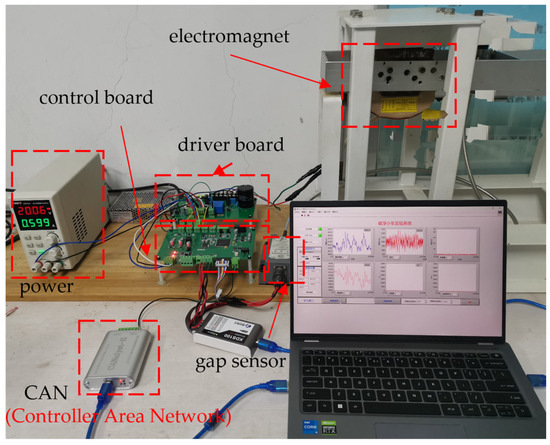
Figure 10.
Experimental platform for single-point suspension system.
It can be derived from Formula (1) that the magnitude of the electromagnetic force exerted between the electromagnet and the track is inversely proportional to the square of the distance separating them. Once the equilibrium state is marginally disrupted, it will result in the landing or adsorption of this node onto the track, and it is unable to suspend stably. Thus, closed-loop control of the system is imperative. The distance variation between the electromagnet and the track is detected by the eddy current sensor. When the electromagnet is disturbed and descends, with the distance expanding, the sensor generates a corresponding change signal. After being modulated by the controller and amplified by the power amplifier, the control current in the control winding of the electromagnet rises correspondingly, the electromagnetic force increases, and the maglev vehicle is drawn back to the equilibrium position.
5.1. Experiment of Suspension
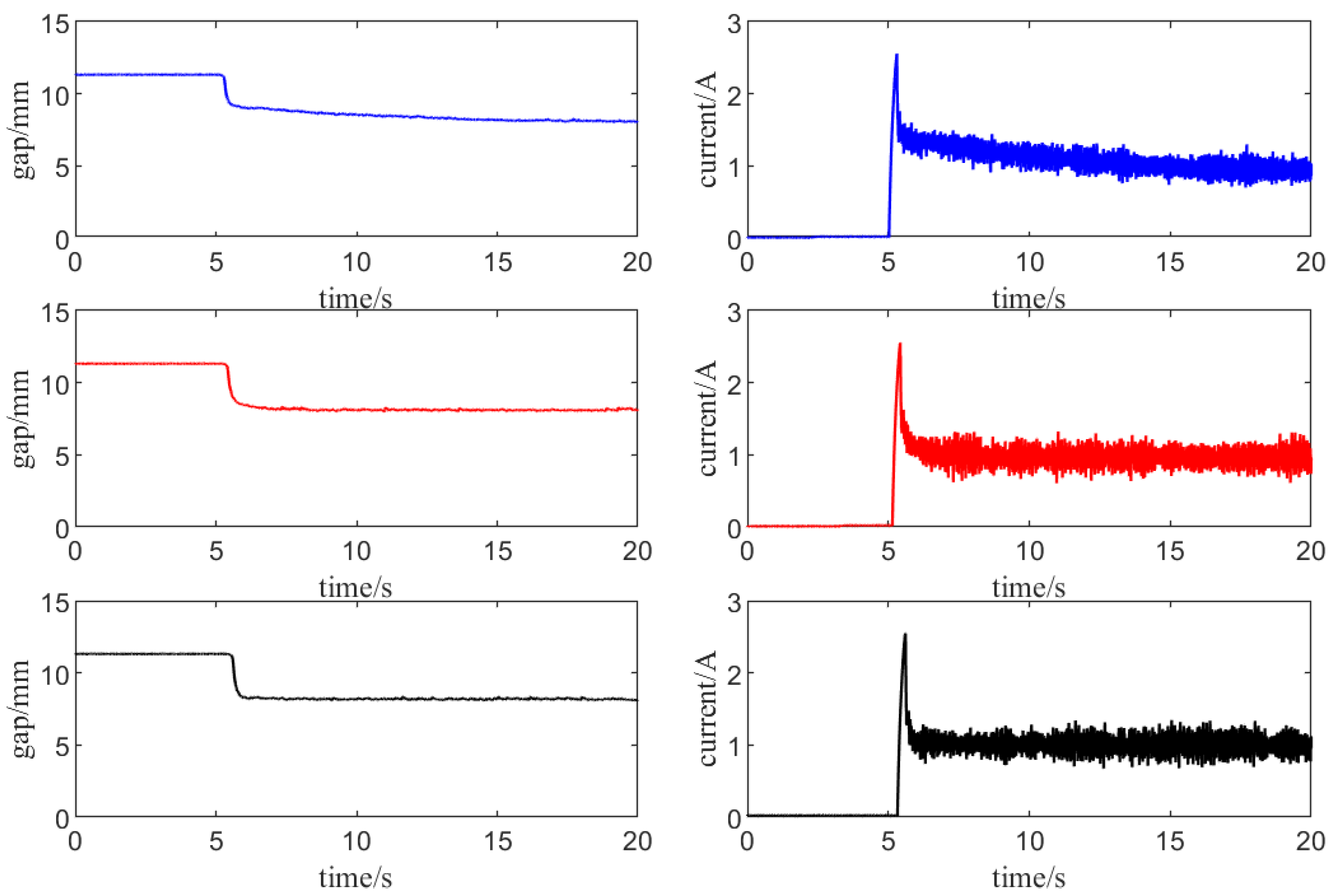
Let the electromagnet float from the static state under the control action to validate the static suspension performance under the enhanced ADRC control. When in a static state, the gap between the electromagnet and the track on the experimental table is 11.314 mm, and the control objective is to enable the electromagnet to stably suspend at a distance of 8 mm from the upper track. The gaps and currents under different controllers during the levitation phase are shown in Figure 11.
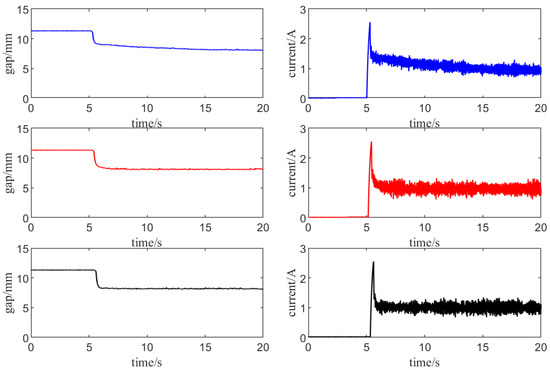
Figure 11.
The gap in the initial floating stage.
The curves of the identical color are associated with the output response curves (gaps) and control signals (currents) under the identical controller. Among these, the blue curves pertain to the PID controller, the red curves relate to the LADRC controller, and the black curves correspond to the MADRC controller (Figure 12 is the same as this). Calculate the IAE and ISE indices of the output response curves, the settling time , the maximum current , and the current at the steady state respectively.
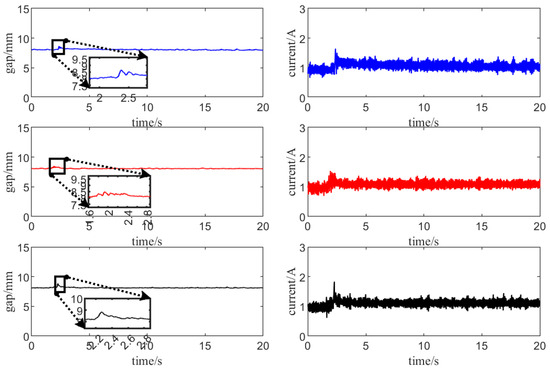
Figure 12.
The gap when disturbed in the suspension state.
According to the results obtained in the Table 2, the response rate of the ADRC controller is significantly higher than that of the PID controller. For practical engineering applications, this situation indicates that the ADRC controller can adjust to system changes more quickly, thereby enhancing the stability and robustness of the system. In contrast, MADRC shows more excellent performance in transient response characteristics, and its control quantities are also smaller.
Table 2.
Performance indicators of the initial floating stage.
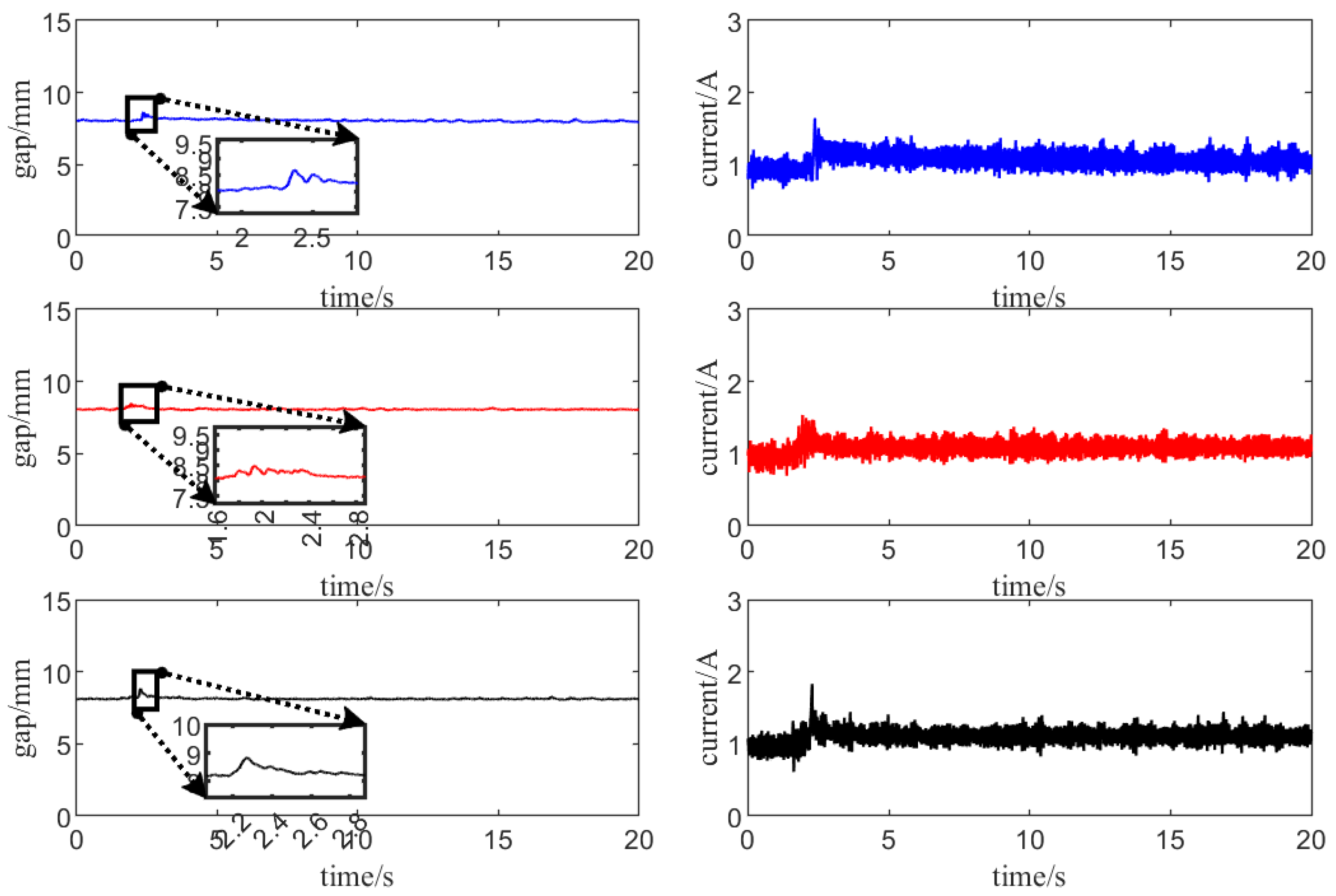
5.2. Experiment of Anti-Disturbance
In the stable suspension state of the electromagnet, a load with a weight of 6.2 kg is added, and the anti-disturbance performance of different controllers is observed and compared. The maximum value of the gap fluctuation , the maximum value of the current , and the adjustment time from being disturbed to returning to the equilibrium state are calculated.
The Modified Active Disturbance Rejection Controller (MADRC) exhibits a significantly superior settling time compared to the Proportional-Integral-Derivative (PID) controller and the Linear Active Disturbance Rejection Controller (LADRC). A comparative analysis of the performance of various controllers during the recovery process reveals that MADRC offers a considerably smoother recovery trajectory in response to disturbances when compared to LADRC. This observation further corroborates that MADRC possesses the most favorable transient response characteristics under disturbance conditions.
6. Conclusions
Based on the control approach proposed in this paper, meticulous verification was conducted on the single-point suspension system experimental platform. Through the analysis of simulation and experimental outcomes, it is evident that the trend of the simulation results aligns with that of the experimental results. As shown in Figure 11 and Figure 12, Table 2 and Table 3, the experimental results of the modified ADRC, it can be seen that the proposed controller has a quick response, slight overshoot, and strong anti-disturbance ability, thereby affirming the effectiveness of the modified ADRC method based on model information in the suspension system of magnetic levitation trains.
Table 3.
Performance indicators upon perturbation.
Nevertheless, it should be noted that due to the imprecision of the model and the constraints of sensor measurement accuracy along with other factors, the control accuracy based on error feedback control might be impacted to a certain extent. In the subsequent work, it is necessary to further optimize the model accuracy and sensor performance to improve the stability and accuracy of the control system.
Author Contributions
Conceptualization, H.W.; methodology, H.W.; software, H.W. and Z.W.; validation, H.W. and Z.L.; formal analysis, Z.W.; investigation, H.W.; resources, Z.L.; data curation, H.W.; writing—original draft preparation, H.W.; writing—review and editing, Z.W.; visualization, H.W.; supervision, Z.L.; project administration, Z.W.; funding acquisition, Z.L. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the National Natural Science Foundation of China (Grant No. 52332011) and the Natural Science Foundation of Hunan Province, China (Grant No. 2022JJ40560).
Data Availability Statement
All data has been presented in the main text.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Sun, Y.; Xu, J.; Chen, C.; Hu, W. Reinforcement learning-based optimal tracking control for levitation system of maglev vehicle with input time delay. IEEE Trans. Instrum. Meas. 2022, 71, 1–13. [Google Scholar] [CrossRef]
- Yang, F.; Zhao, C.; Bai, Z.; Tong, L.; Shu, Y. A modified electromagnetic force calculation method has high accuracy and applicability for EMS maglev vehicle dynamics simulation. ISA Trans. 2023, 137, 186–198. [Google Scholar] [CrossRef] [PubMed]
- Han, J. From PID to active disturbance rejection control. IEEE Trans. Ind. Electron. 2009, 56, 900–906. [Google Scholar] [CrossRef]
- Zhang, M.; Li, Q. A Compound Scheme Based on Improved ADRC and Nonlinear Compensation for Electromechanical Actuator. Actuators 2022, 11, 93. [Google Scholar] [CrossRef]
- Wu, Z.; Li, D.; Liu, Y. Performance Analysis of Improved ADRCs for a Class of High-Order Processes with Verification on Main Steam Pressure Control. IEEE Trans. Ind. Electron. 2023, 70, 6180–6190. [Google Scholar] [CrossRef]
- Tao, L.; Wang, P.; Ma, X. Variable Form LADRC-Based Robustness Improvement for Electrical Load Interface in Microgrid: A Disturbance Response Perspective. IEEE Trans. Ind. Inform. 2024, 20, 432–441. [Google Scholar] [CrossRef]
- Wei, Q.; Wu, Z.; Zhou, Y. Active Disturbance-Rejection Controller (ADRC)-Based Torque Control for a Pneumatic Rotary Actuator with Positional Interference. Actuators 2024, 13, 66. [Google Scholar] [CrossRef]
- Zhao, S.; Gao, Z. Active disturbance rejection control for non-minimum phase systems. In Proceedings of the 29th Chinese Control Conference, Beijing, China, 29–31 July 2010. [Google Scholar]
- Xue, W.; Huang, Y.; Gao, Z. On ADRC for non-minimum phase systems: Canonical form selection and stability conditions. Control Theory Technol. 2016, 14, 199–208. [Google Scholar] [CrossRef]
- Sun, L.; Li, D.; Gao, Z.; Yang, Z.; Zhao, S. Combined feedforward and model-assisted active disturbance rejection control for non-minimum phase system. ISA Trans. 2016, 64, 24–33. [Google Scholar] [CrossRef] [PubMed]
- Liu, R.; Nie, Z.; Shao, H. Active disturbance rejection control for non-minimum phase systems under plant reconstruction. ISA Trans. 2023, 134, 497–510. [Google Scholar] [CrossRef] [PubMed]
- Gao, Z. Scaling and Bandwidth-Parameterization based Controller Tuning. In Proceedings of the 2003 American Control Conference, Denver, CO, USA, 4–6 June 2003. [Google Scholar]
- Zhao, Z.; Guo, B. On active disturbance rejection control for nonlinear systems using time-varying gain. Eur. J. Control 2015, 23, 62–70. [Google Scholar] [CrossRef]
- Ran, M.; Wang, Q.; Dong, C.; Xie, L. Active disturbance rejection control for uncertain time-delay nonlinear systems. Automatica 2020, 112, 108692. [Google Scholar] [CrossRef]
- Guo, B.; Zhao, Z. On the convergence of an extended state observer for nonlinear systems with uncertainty. Syst. Control Lett. 2011, 60, 420–430. [Google Scholar] [CrossRef]
- Xu, Z.; Gerada, C. Enhanced Estimation of Clamping-Force for Automotive EMB Actuators Using a Switching Extended State Observer. IEEE Trans. Ind. Electron. 2023, 71, 2220–2230. [Google Scholar] [CrossRef]
- Sun, Y.; Xu, J.; Wu, H.; Lin, G.; Mumtaz, S. Deep Learning Based Semi-Supervised Control for Vertical Security of Maglev Vehicle With Guaranteed Bounded Airgap. IEEE Trans. Intell. Transp. Syst. 2021, 22, 4431–4442. [Google Scholar] [CrossRef]
- Sun, Y.; Qiang, H.; Wang, L.; Ji, W.; Mardani, A. A Fuzzy-Logic-System-Based Cooperative Control for the Multielectromagnets Suspension System of Maglev Trains With Experimental Verification. IEEE Trans. Fuzzy Syst. 2023, 31, 3411–3422. [Google Scholar] [CrossRef]
- Ding, J.; Liang, S.; Long, Z. Research on performance evaluation method of levitation control system for maglev train. In Proceedings of the 2019 Chinese Automation Congress (CAC), Hangzhou, China, 22–24 November 2019. [Google Scholar]
- Wen, T.; Zhang, Y.; Long, Z.Q. Study on levitation control performance assessment of maglev train based on minimum entropy. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2024, 238, 128–137. [Google Scholar] [CrossRef]
- Liang, S.; Dai, C.; Long, Z. Research on Vibration Control Regarding Mechanical Coupling for Maglev Trains with Experimental Verification. Actuators 2024, 13, 313. [Google Scholar] [CrossRef]
- Han, J. Self-Regulation Control Technology: A Control Technology for Estimating and Compensating for Uncertain Factors; National Defense Industry Press: Beijing, China, 2008; pp. 197–198. [Google Scholar]
- Yuan, Y.; Wang, Z.; Yu, Y. Active disturbance rejection control for a pneumatic motion platform subject to actuator saturation: An extended state observer approach. Automatica 2019, 107, 353–361. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).