
Data-Driven Control Method Based on Koopman Operator for Suspension System of Maglev Train

 , , , ,
, , , ,  and
and 
Abstract
1. Introduction
- To address the data-driven modeling problem of the single-electromagnet suspension system, the EDMD method is used to approximate the Koopman operator, and the high-dimensional linearized model of the suspension system is established based on the state data of the system. This approach realizes the modeling of the system with uncertain parameters, overcoming the limitation in the accuracy of traditional Taylor linearization;
- Based on the data-driven model of the suspension system, optimization of the system control is studied. An uplifted-dimensional feedback controller is designed using the Koopman method, and the LQR method is used to optimize the control parameters. Furthermore, an extended state observer is developed based on the data-driven model to compensate for external disturbances in the system. System simulation and test bench experiments demonstrate that the Koopman data-driven method can effectively model the suspension system without relying on predefined system parameters, simplify the tuning process of the suspension control, and enhance the control response of the suspension system;
- Considering the application scenario of the maglev train, a multi-degree-of-freedom (multi-DOF) model of the suspension system is constructed to study the dynamic response of the suspension system and the vehicle under the disturbance of track irregularity. To model the suspension system with parameter variations during the opeartion, the data-driven modeling approach is enhanced based on the EDMD method. An online rolling-update method is proposed to achieve the online modeling of the system, which allows for real-time adaptive modeling and enhances the suspension system’s adaptability and stability, thereby improving the vehicle’s dynamic response.
2. Data-Driven Method of Suspension System by Koopman Operator
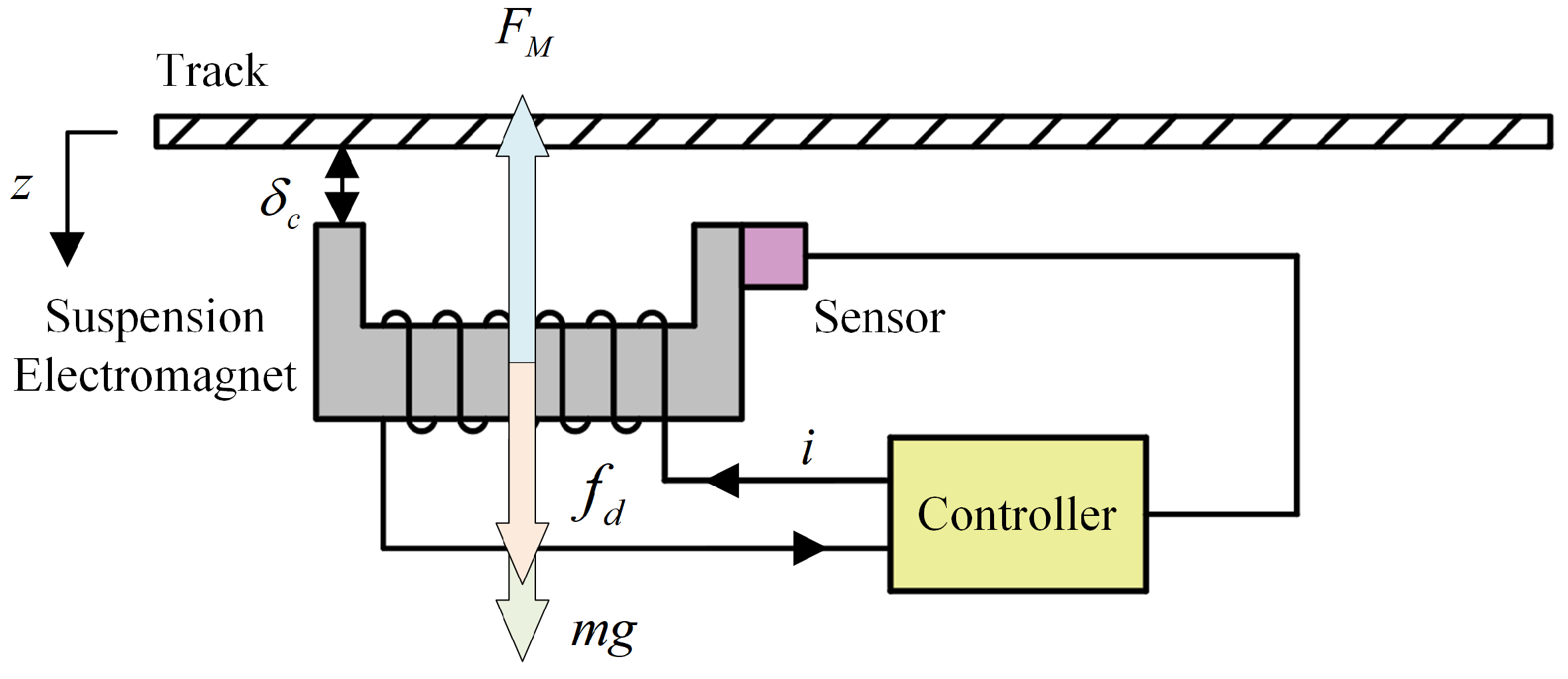
2.1. Single-Electromagnetic Control Model
2.2. Introduction of Koopman Operator
2.3. Suspension Control Algorithm Based on Koopman Data-Driven Model
2.3.1. Data-Driven Modeling Method by EDMD
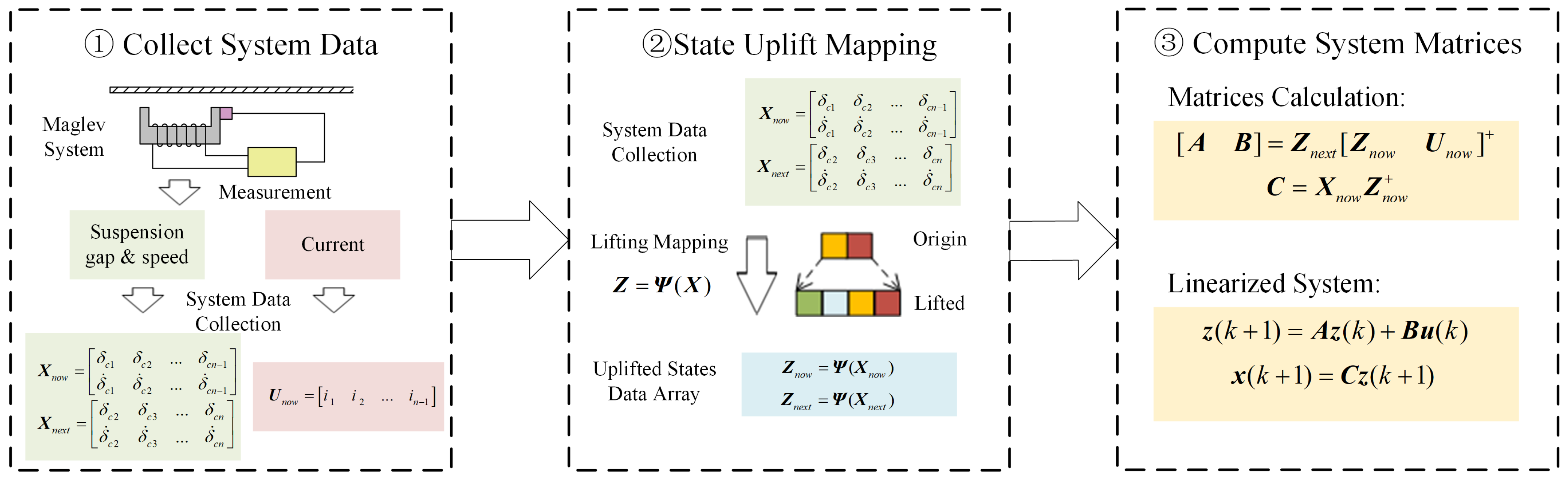
- Data collecting: Collect the gap and velocity from the suspension system of n sets. Select 1~n − 1 sets of data to construct the current state matrix of the system ; Select 2~n sets of data to construct the current output matrix :Corresponding to the system states, collect the input current signals of n − 1 sets, to construct the system input matrix :
- Uplift mapping for the system states: The core of the EDMD method is to uplift the dimensionality of the system variables through uplift functions, mapping the system from a low-dimensional space to a high-dimensional space, to approxmate the Koopman operator.Choose basis functions of r to construct an uplifting function sequence, define matrix transformation , to uplift the state matrix of the origin system, and obtain the uplifted system state matrix Z:Considering the relationship of the state variables of the suspension system, the uplifting functions based on polynomials are selected as:Set function (17) as the basis function and uplift the data collection of the system states, to obtain the uplifted data matrices and :represents the j-th group of uplifted status of the system.
- System model calculation: For the suspension system, the form of system matrices are , , and , which can be calculated by:In the expression, + represents the Penrose–Moore pseudoinverse, calculated by matrix transposition or SVD decomposition [19].
2.3.2. Optimization of the Suspension Controller by Data-Driven Model
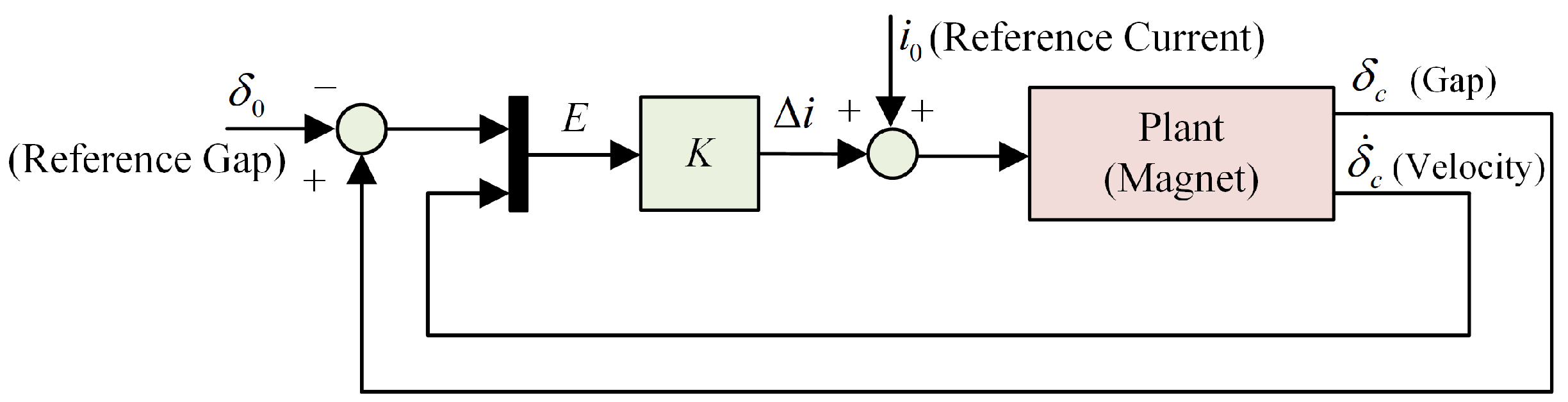
- Design of LQR feedback controller: The “Gap-Velocity” controller can be uplifted and reconstructed by the discrete Koopman model, as shown in (22).The error matrix of the system is, which represents the sampling time of the discrete system and . The current of the equilibrium point can be calculated by the system matrices:The feedback control parameters are calculated by the LQR method. When the discrete system model is known, the matrix of feedback parameters is:In (24), matrix and are the LQR parameter matrix and matrix is the solution of the discrete Riccati equation:
- Design of ESO and disturbance compensation: To observe and compensate for external disturbances and modeling errors of the system, an ESO based on the high-dimensional system model is designed to compensate for the output of the feedback controller, thereby improving the system’s response under the external disturbance.For the system model as (11) and (12), considering the system disturbance , the state space expression is:Set as the extended state of the system, is the sampling time of the system, the observer is designed as:whereIn (27), z and u are the states and input of the uplifted system, and are the observations of the system states, is the observation of the system disturbance, and is the gain of the ESO.With the observation by the ESO, the current from the controller can be compensated by (29) and (30):where is the compensation current of the controller against the disturbance [20].
3. Verification of the Data-Driven Method of the Suspension System
3.1. Model Simulation of the Data-Driven Method
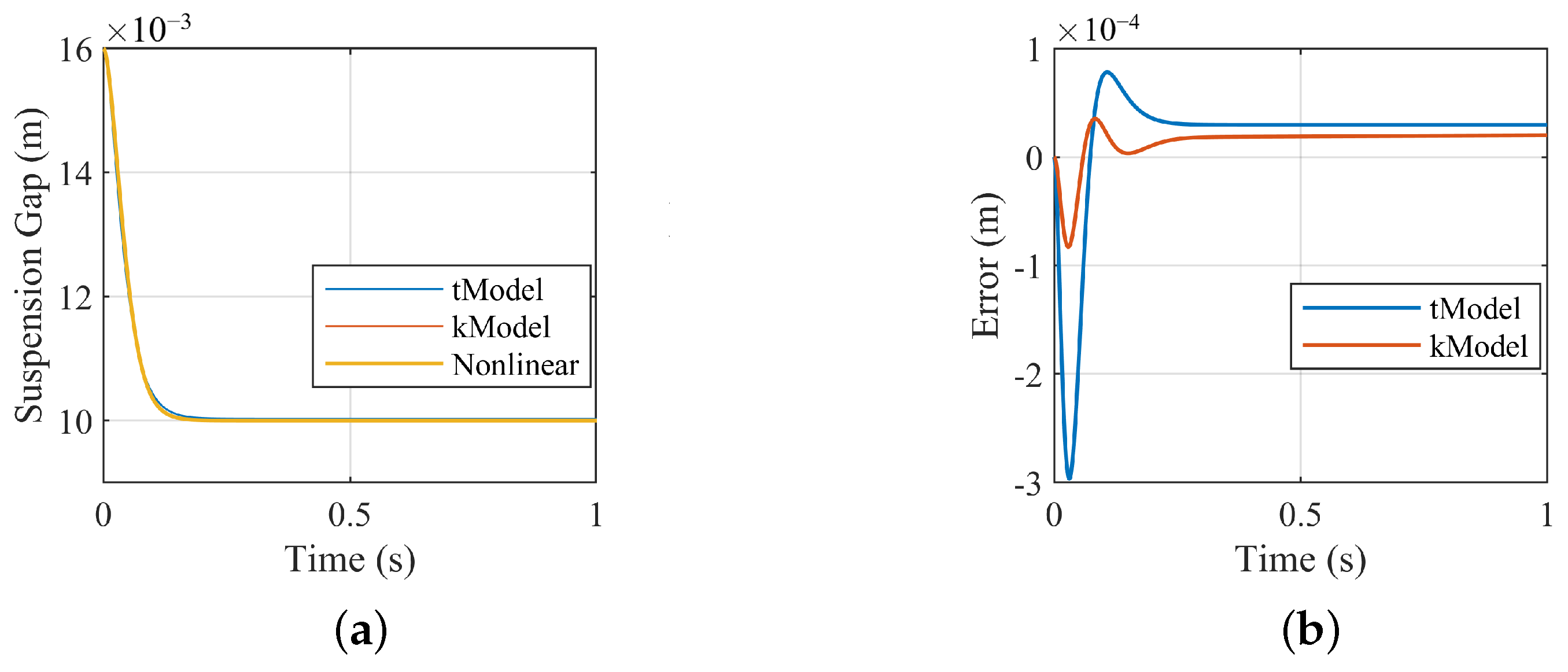
- Data-driven modeling: Set the simulation time to 10 s, and the sampling time to 0.001 s. Collect the gap, velocity, and current data from the suspension system model. To collect the states of the system under different conditions, various feedback control parameters and reference gaps (equilibrium points) are selected for simulation.Assuming the parameters of the system are unknown, based on the data collection from the system, a data-driven modeling of the suspension system is carried out as Section 2.3, and the system matrices A, B, and C are obtained.Figure 5 shows the suspension gap response of the system model, which are, respectively, the nonlinear model as (3), the linearized model by Taylor expansion as (5) (tModel), and the Koopman data-driven model (kModel), with the same controller parameters. Compared to the tModel, the data-driven model has smaller modeling errors, indicating that the high-dimensional linearized model established by the Koopman data-driven method can meet the analysis requirements for nonlinear systems.
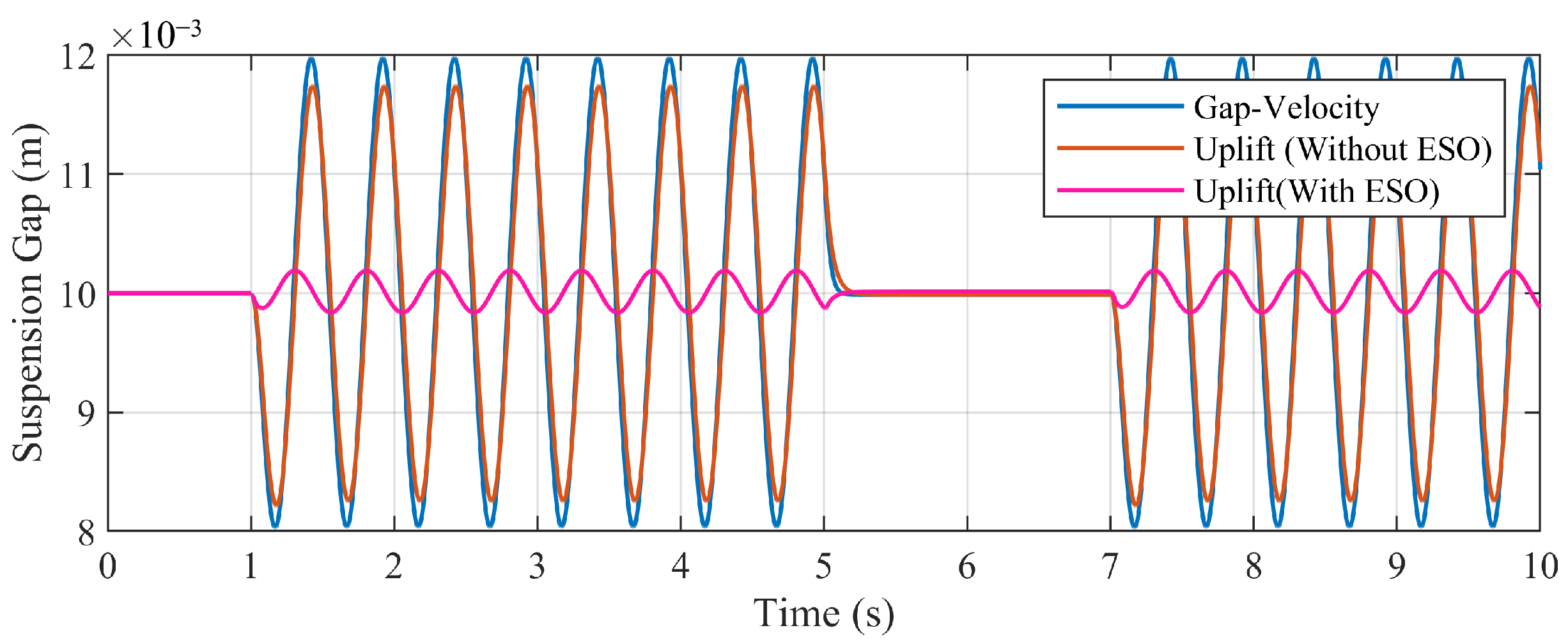
- Optimization of the suspension control by the data-driven model: Reconstruct the “gap-velocity” controller as Section 2.3.2, and calculate the parameters of the feedback controller. Set Q = diag(5,1,2,1), R = [5]. The result is K = [−4662.1,−143.02,−4571.02, 114.93], = 23.53 A.Based on the data-driven model, the ESO is designed, and the gain of the ESO is set as .According to (3), applying a disturbance signal to the current input is equivalent to applying an external disturbance to the system. After the suspension system has stabilized, a sinusoidal disturbance (2 Hz, 1 A) is applied to the simulation model. Figure 6 shows the response of the air gap of the magnet when the system uses the original “gap-velocity” controller and uplifted controller (without ESO compensation and with ESO compensation).By the uplifted feedback controller, based on the data-driven model, the control parameters are further optimized, reducing the offset of the gap response from ±1.98 mm to ±1.78 mm. Compared to the linearized tModel, the Koopman model preserves the nonlinear characteristics of the system beyond the equilibrium point, thereby enabling further optimization of the control parameters.Moreover, with the disturbance compensation from the ESO, the simulation result shows a significant reduction in the peak-peak fluctuation of the suspension gap response, as the offset decreases to ±0.16 mm.
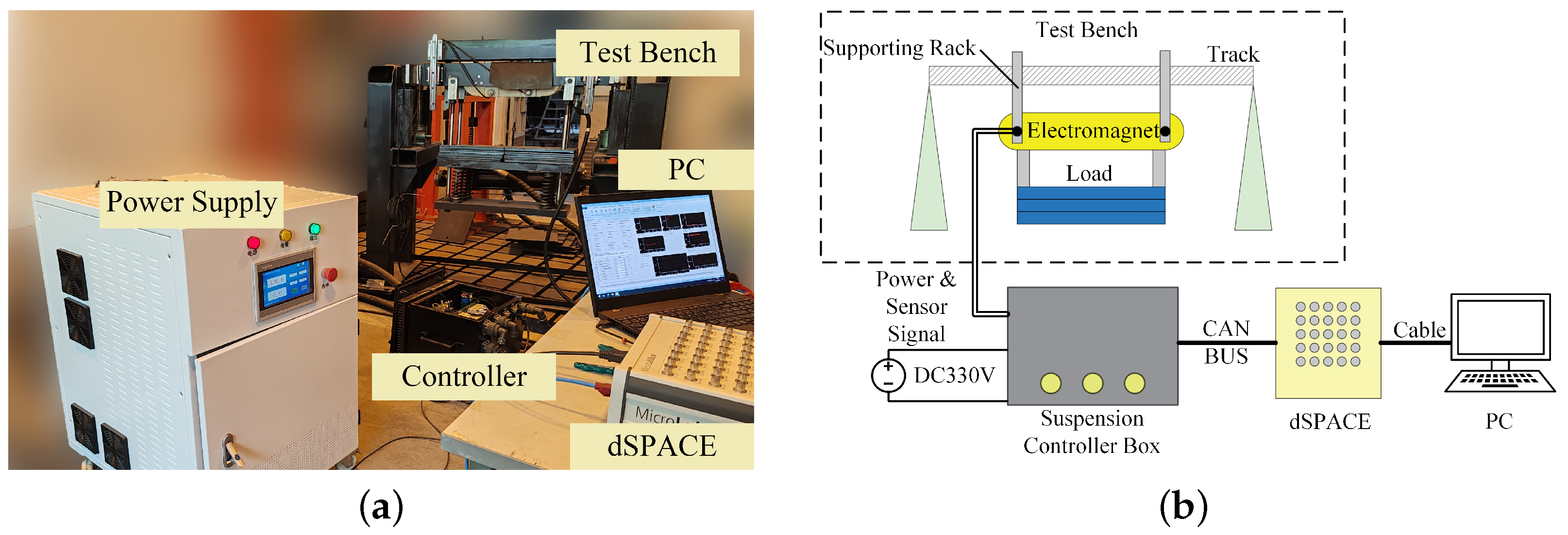
3.2. Data-Driven Modeling Experiment on Maglev Test Bench
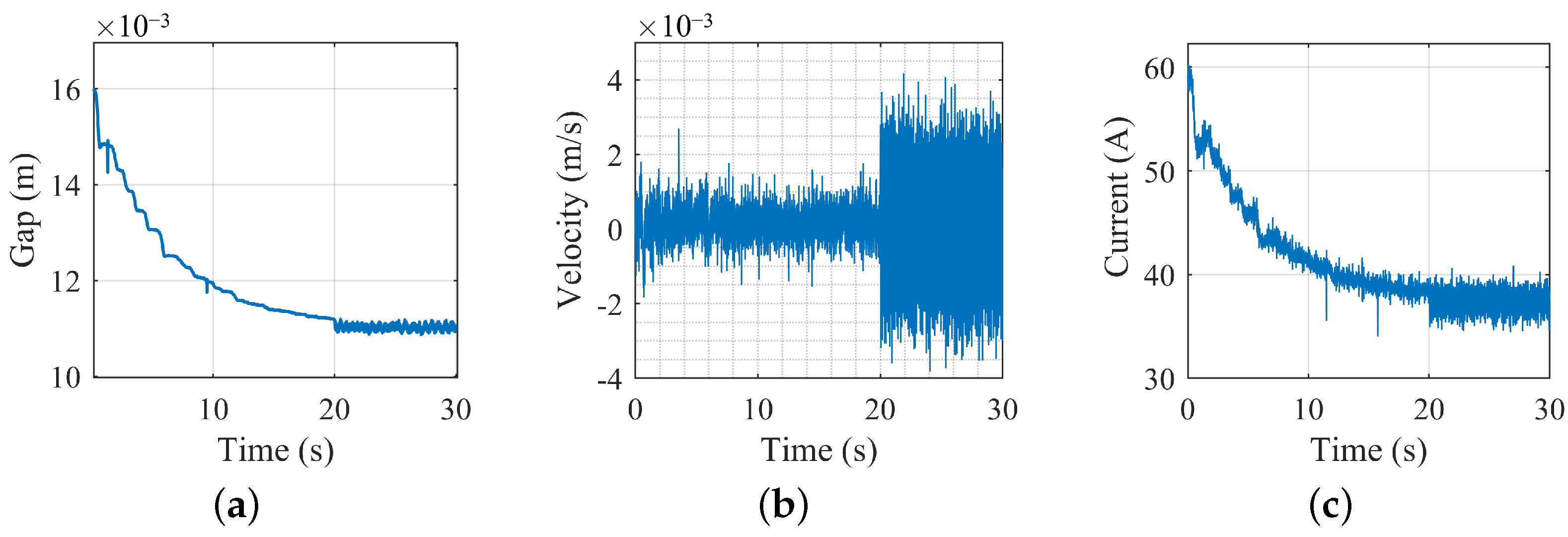
- Data collection and data-driven modeling: To solve the noise interference problem and the input saturation of the test bench system, an integral feedback loop is introduced based on the original “gap-velocity” controller, forming a discrete PID controller (31) and (32).where is the sampling time of the system, K is tuned by experience, as K = [−6000,−750], while the parameter = −430 remains unchanged.Collect the state and input data from the system (apply disturbance after the magnet is stabilized) of several sets. The sampling time is 0.001 s, and 30 s of data are collected each time. The suspension gap is measured directly by the sensor, while the velocity is indirectly measured by integrating acceleration signals from the sensor. For example, one set of the test data collections is shown in Figure 8.With the collected data, the system matrices can be calculated as (20) and (21), and the high-dimensional linearized model is constructed. The feedback parameter matrix K is calculated by the LQR method, whose parameters are Q = diag(5,1,2,1) and R = [5]. The result is K = [−5755.6, −935.96, −96,578, 6370], and the current of the equilibrium point ( = 11 mm) is = 37.43 A.
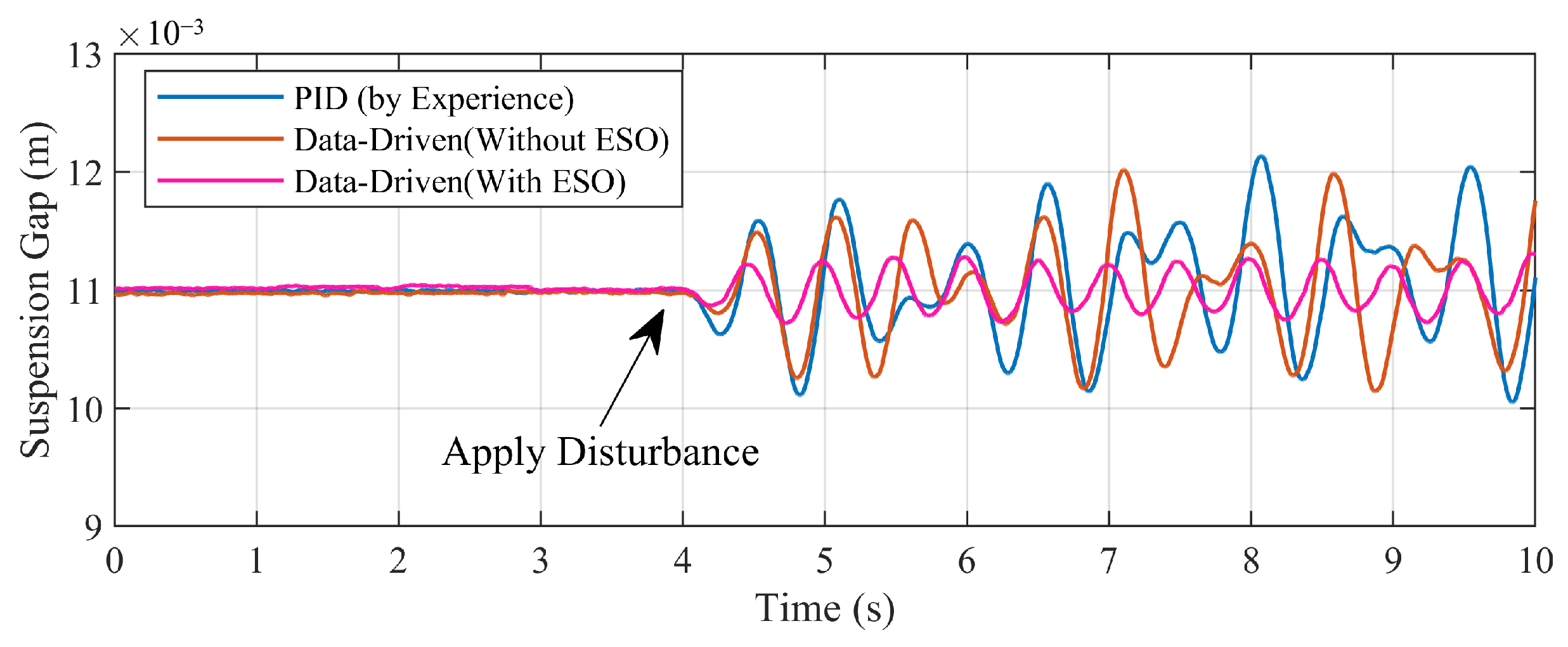
- Test of control optimization by data-driven model: Set the reference gap as = 11 mm and conduct a suspension test by the uplifted feedback controller on the test bench. Figure 9 shows the suspension gap response of the bench after using the optimized controller. The magnet remains relatively stable.The ESO is constructed with the gain based on the data-driven model, to compensate for the suspension current. After the suspension system stabilizes, a sinusoidal disturbance current (2 Hz, 1 A) is applied to the system. Figure 10 shows the gap response of the system, comparing the PID (by experience) and the data-driven method (before and after using the ESO). Compared to the experience-based PID controller, the feedback controller based on the data-driven model has better performance, decreasing the fluctuation by 12.9% for the maximum, and 14.3% for the IAE index. In addition, after adopting the ESO compensation, the fluctuation of the suspension gap further decreased by 72.3% of the maximum, and 58.5% for the IAE index, as shown in Table 1. In summary, the data-driven method with compensation has a better performance under the external force disturbance, which can provide a maximum reduction of 75.0% of the system fluctuation in total.
4. Data-Driven Modeling Method for the Operation Scenarios of Maglev Trains
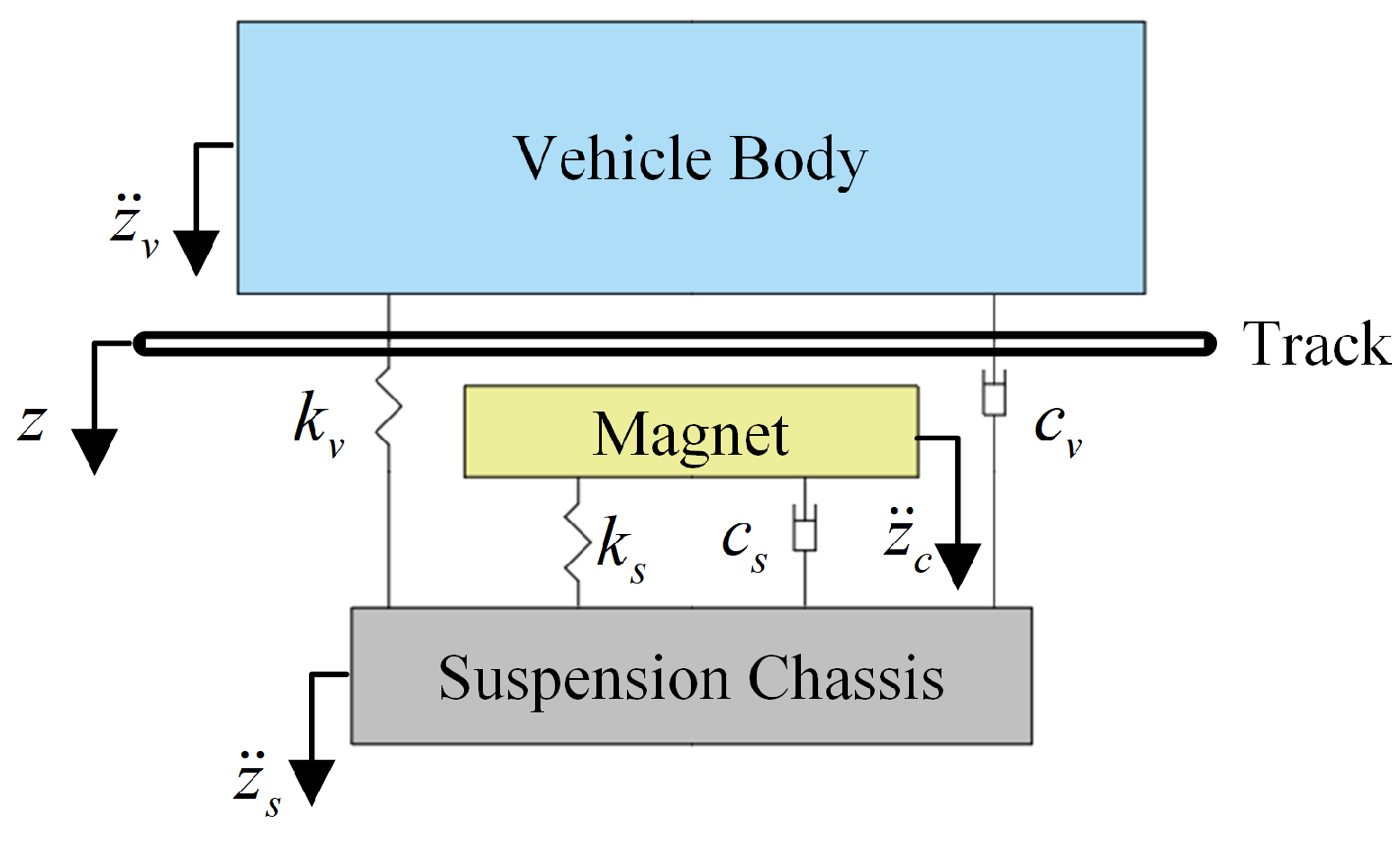
4.1. Multi-DOF Model of the Suspension System
4.2. Rolling-Update Modeling Based on the Koopman Operator
- After the system starts operating, sample the system’s state data and input data to construct data matrices X and U for sets, and perform Koopman modeling according to Section 2.3 to obtain the system model matrices A, B, and C.
- Continue to collect data of sets ( < ), to replace the first data sets in X and U (The total amount of collected data remains ).Select the first − 1 data sets to construct uplifted-state data matrix and input data matrix ; and select 2~ data sets to construct output data matrix (as the reference data matrix).Based on the data-driven model constructed in Step 1, calculate the system output as:
- Calculate the accuracy of the model as . If the result is bigger than threshold , the update of the system is required. The system model is reconstructed by (20)~(21) using the new data matrices. Otherwise, the system model remains unchanged. Repeat the above process until the system stops.
4.3. Data-Driven Simulation of the Suspension System under Track Irregularities
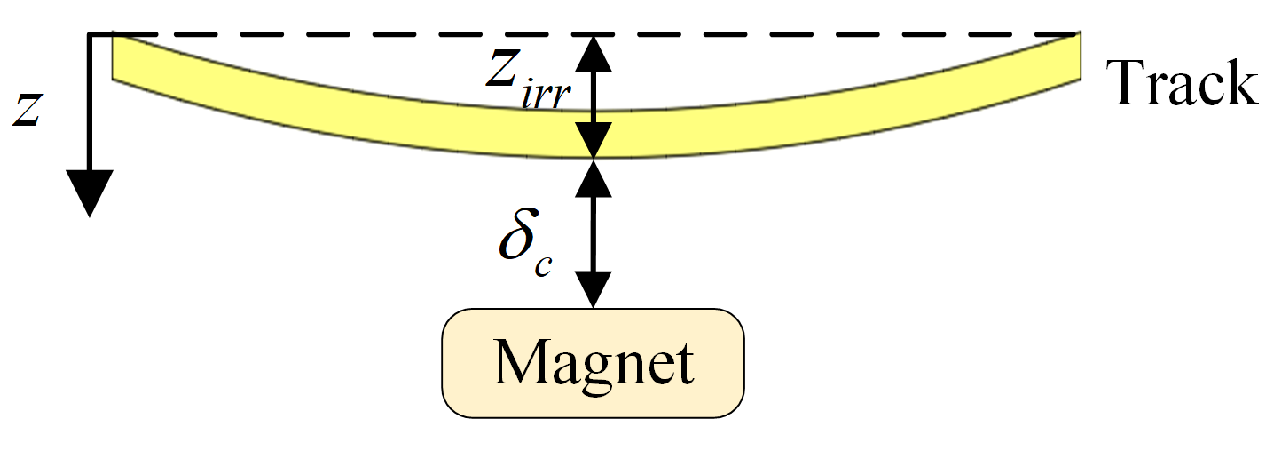
4.3.1. Influence of Track Irregularities on the Suspension System
4.3.2. Simulation of Data-Driven Modeling under the Track Irregularities
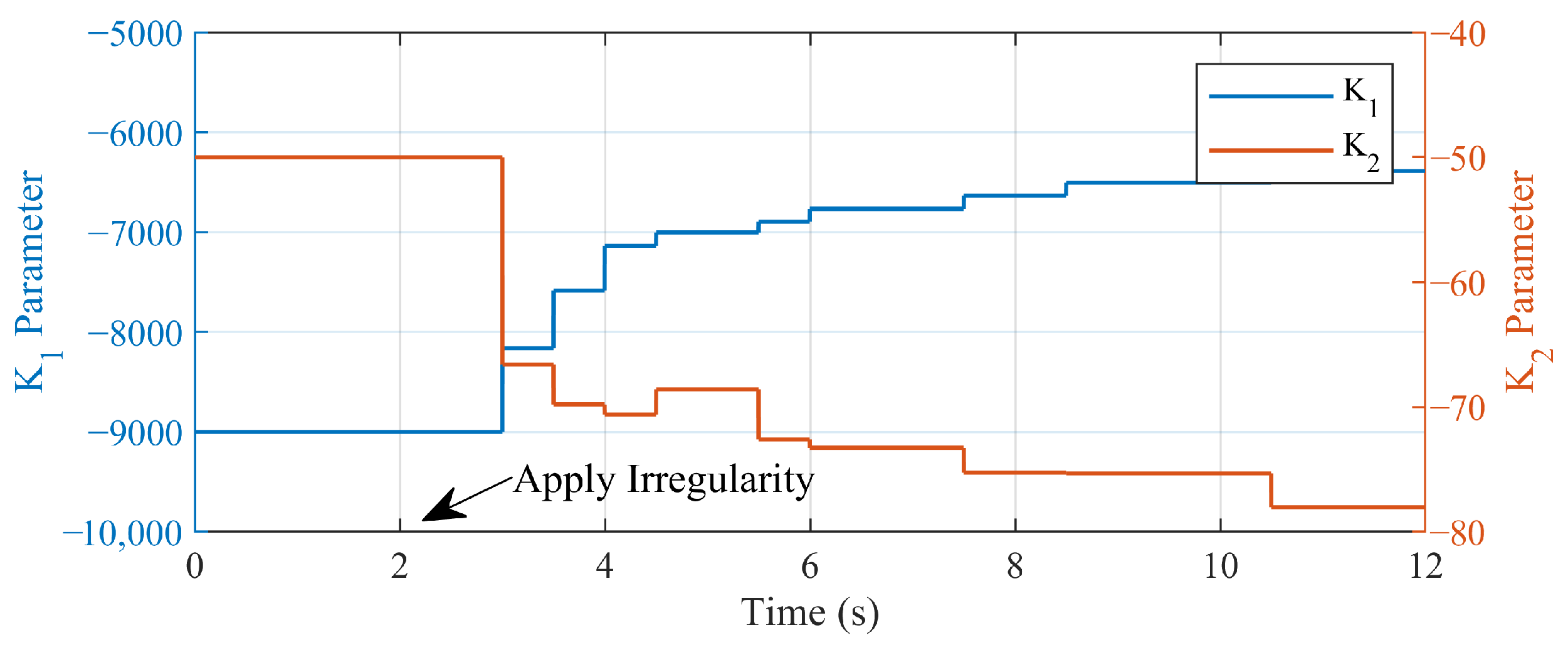
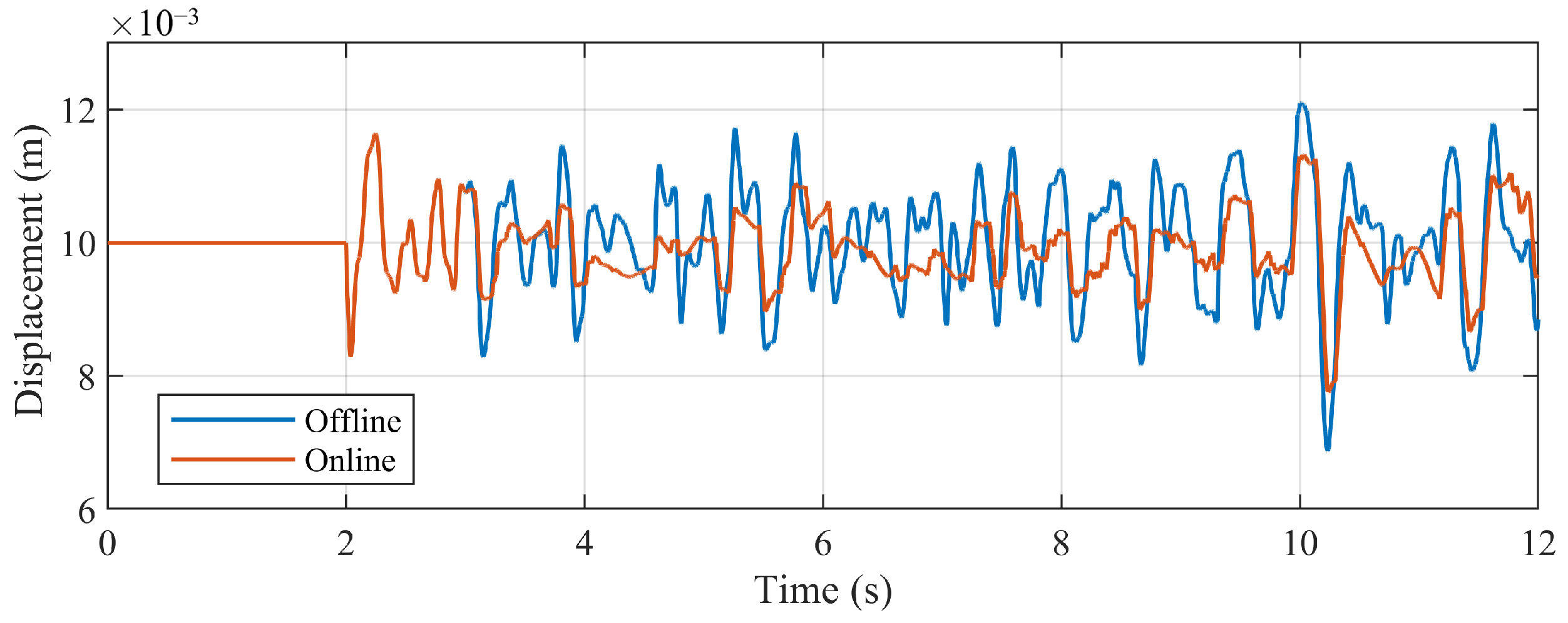
- The vertical displacement of the suspension electromagnet: Figure 16 shows the vertical displacement of the suspension magnet. By the rolling-update method, as the system model is updated, the control parameters change, and the offset of the vertical displacement of the suspension electromagnet is significantly reduced. Calculate the integral absolute error (IAE) of the displacement response of the suspension magnet (Table 3), the result shows that after applying the rolling-update method, the IAE decreases, indicating that the response of the suspension system behaves better under the track irregularities.
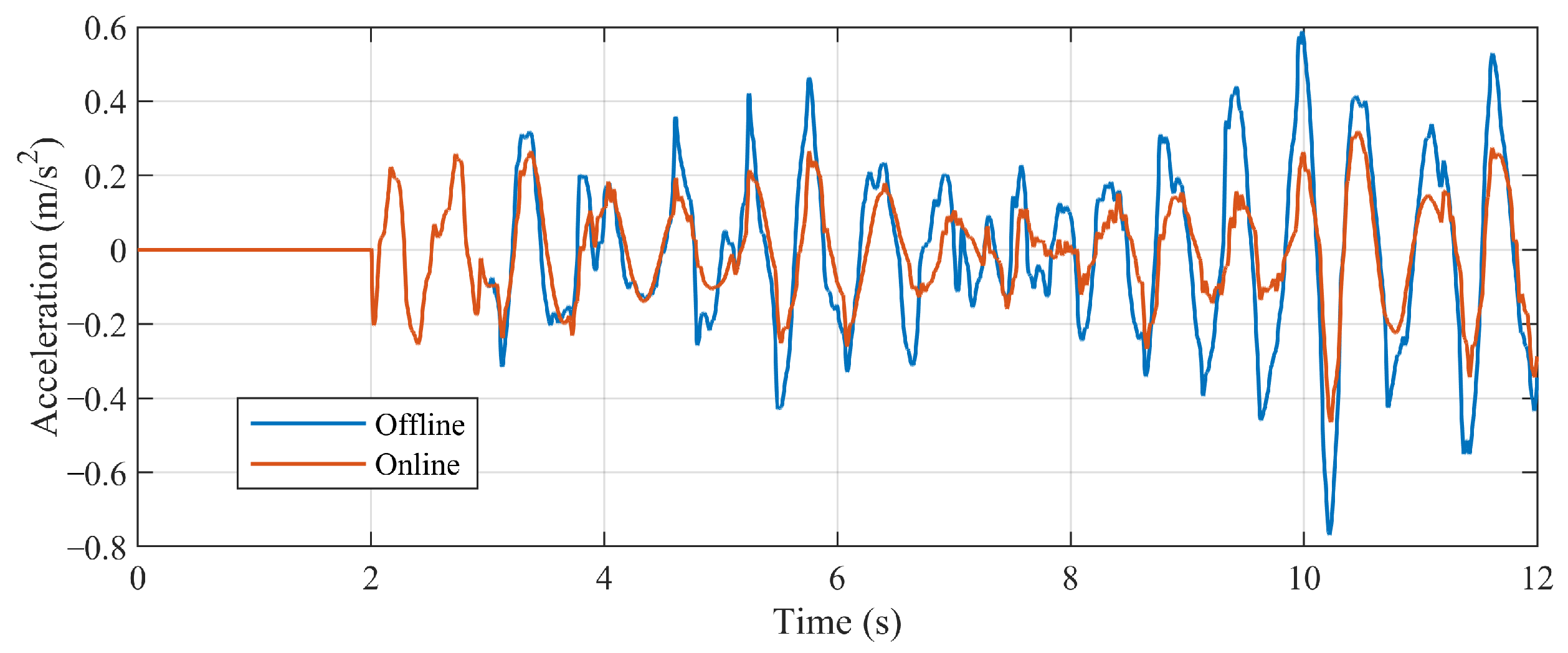
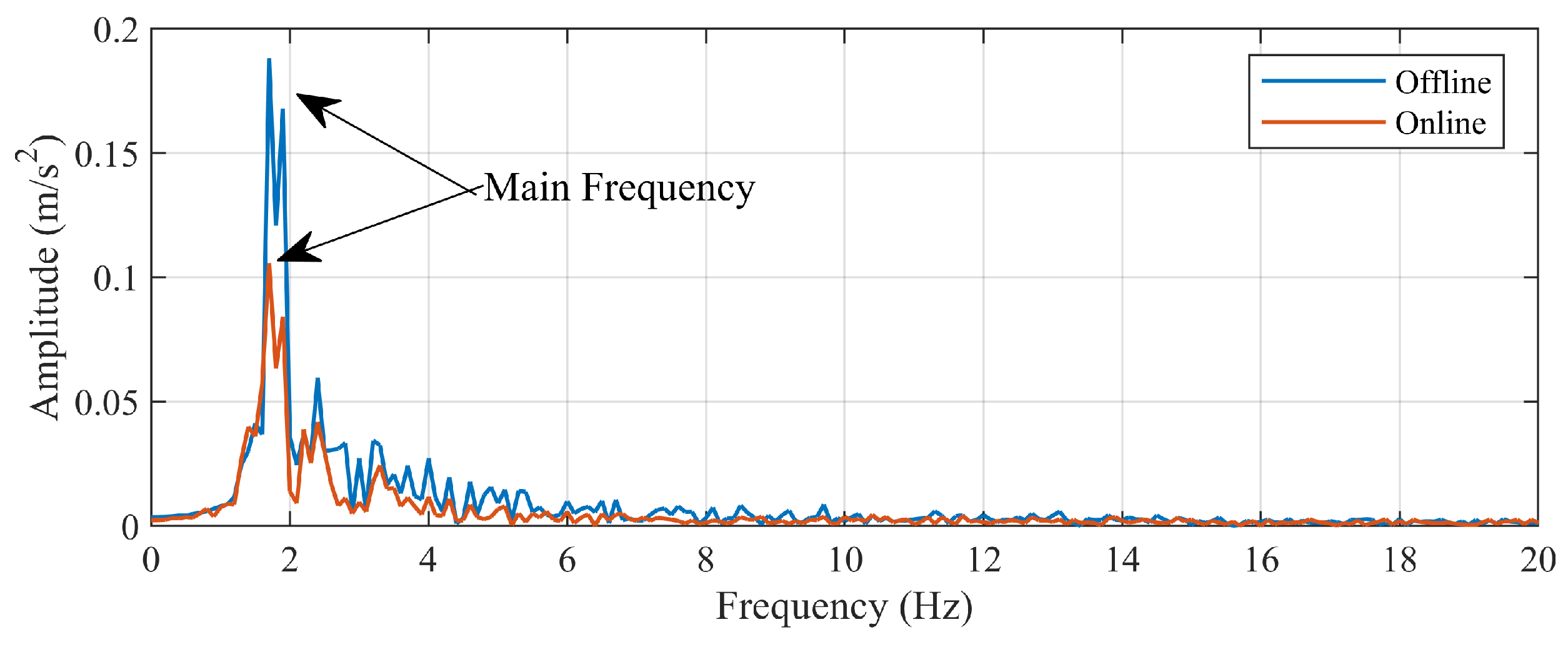
- The vibration acceleration of the vehicle body: Figure 17 and Figure 18, and Table 4 show the time-domain response and frequency spectrum of the vertical vibration acceleration of the vehicle body. From the time-domain response, it can be seen that compared to the offline model, the vibration acceleration of the vehicle body with the rolling-update parameters shows a decreasing trend, and the maximum amplitude decreases by about 40.0%. Conducting the variance analysis on vibration acceleration, the result shows that with the rolling-update method, the variance of the acceleration decreased, which means the fluctuation of acceleration response is smaller.Spectral analysis is conducted on the acceleration response as Figure 18, and the acceleration amplitude of the vehicle at the main frequency (1.7 Hz) decreased from 0.188 m/s2 to 0.100 m/s2, decreasing 46.8%, while the amplitudes of other frequency components also decreased. The above results indicate that after the rolling update of the system model, the vibration amplitude of the vehicle body decreases when the system is disturbed by track irregularities.
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| EMS | Electromagnetic Suspension |
| DMD | Dynamic Mode Decomposition |
| EDMD | Extended Dynamic Mode Decomposition |
| tModel | the linearized model by Taylor expansion |
| kModel | the Koopman data-driven model |
| IAE | Integral Absolute Error |
| DOF | Degree-of-Freedom |
References
- Wang, K.R.; Luo, S.H.; Zhang, J.Y.; Ma, W.H. Maglev System Control Algorithm and the Related Dynamic Analysis. In Proceedings of the ICRT 2017: Railway Development, Operations, and Maintenance, Chengdu, China, 10–12 July 2017; American Society of Civil Engineers: Reston, VA, USA, 2018; pp. 689–698. [Google Scholar]
- Chen, Q.; Tan, Y.; Li, J.; Mareels, I. Decentralized PID Control Design for Magnetic Levitation Systems Using Extremum Seeking. IEEE Access 2018, 6, 3059–3067. [Google Scholar] [CrossRef]
- Zhu, Y.H.; Yang, Q.; Li, J.; Wang, L.C. Research on Sliding Mode Control Method of Medium and Low Speed Maglev Train Based on Linear Extended State Observer. Machines 2022, 10, 644. [Google Scholar] [CrossRef]
- Yaseen, H.M.S.; Siffat, S.A.; Ahmad, I.; Malik, A.S. Nonlinear adaptive control of magnetic levitation system using terminal sliding mode and integral backstepping sliding mode controllers. ISA Trans. 2022, 126, 121–133. [Google Scholar] [CrossRef]
- Sun, Y.G.; Qiang, H.Y.; Wang, L.; Ji, W.; Mardani, A. A Fuzzy-Logic-System-Based Cooperative Control for the Multielectromagnets Suspension System of Maglev Trains With Experimental Verification. IEEE Trans. Fuzzy Syst. 2023, 10, 3411–3422. [Google Scholar] [CrossRef]
- Zhu, J.Q.; Ge, Q.X.; Sun, P.K. Extended State Observer-Based Sensorless Control for High-Speed Maglev Application in Single-Feeding Mode and Double-Feeding Mode. IEEE Trans. Transp. Electrif. 2022, 8, 1350–1361. [Google Scholar] [CrossRef]
- Wang, H.; Zhong, X.B.; Shen, G. Levitation control strategy for maglev on elastic track based on Kalman filter. J. Cent. South Univ. Sci. Technol. 2014, 45, 965–972. [Google Scholar]
- Yang, Q.; Chi, Z.X.; Wang, L.C. Influence and Suppression Method of the Eddy Current Effect on the Suspension System of the EMS Maglev Train. Machines 2022, 10, 476. [Google Scholar] [CrossRef]
- Ni, F.; Dai, Y.W.; Xu, J.Q.; Rong, L.J.; Zheng, Q.H. Performance Evaluation of the Suspension System on Maglev Trains Based on Measurement Data. Metrol. Meas. Syst. 2024, 31, 115–133. [Google Scholar] [CrossRef]
- Li, X.; Zhu, H.; Ma, J.; Teo, T.J.; Teo, C.S.; Tomizuka, M.; Lee, T.H. Data-Driven Multiobjective Controller Optimization for a Magnetically Levitated Nanopositioning System. IEEE/ASME Trans. Mechatronics 2020, 25, 1961–1970. [Google Scholar] [CrossRef]
- Chen, Q.; Tan, Y.; Li, J.; Oetomo, D.; Mareels, I. Model-Guided Data-Driven Decentralized Control for Magnetic Levitation Systems. IEEE Access 2018, 6, 43546–43562. [Google Scholar] [CrossRef]
- Proctor, J.L.; Brunton, S.L.; Kutz, J.N. Generalizing Koopman Theory to Allow for Inputs and Control. SIAM J. Appl. Dyn. Syst. 2018, 17, 909–930. [Google Scholar] [CrossRef] [PubMed]
- Korda, M.; Mezic, I. Linear predictors for nonlinear dynamical systems: Koopman operator meets model predictive control. Automatica 2018, 93, 149–160. [Google Scholar] [CrossRef]
- Zhao, D.; Yang, X.; Li, Y.; Xu, L.; She, J.; Yan, S. A Kalman-Koopman LQR Control Approach to Robotic Systems. IEEE Trans. Ind. Electron. 2024, early access. [CrossRef]
- Korda, M.; Susuki, Y.; Mezic, I. Power grid transient stabilization using Koopman model predictive control. IFAC-PapersOnLine 2018, 51, 297–302. [Google Scholar] [CrossRef]
- Wen, T.; Long, Z.Q.; Zhou, X.; Hu, Y.P. Study on Data-Driven Control of Maglev Train Levitation System Based on Koopman Linear Reconstruction. Proc. Rom. Acad. Ser. A 2022, 23, 161–170. [Google Scholar]
- Calderón, H.M.; Schulz, E.; Oehlschlägel, T.; Werner, H. Koopman Operator-based Model Predictive Control with Recursive Online Update. In Proceedings of the 2021 European Control Conference (ECC), Rotterdam, The Netherlands, 29 June–2 July 2021; pp. 1543–1549. [Google Scholar]
- Wang, D.N.; Meng, F.W.; Meng, S.Y. Linearization Method of Nonlinear Magnetic Levitation System. Math. Probl. Eng. 2020, 23, 9873651. [Google Scholar] [CrossRef]
- Williams, M.O.; Kevrekidis, I.G.; Rowley, C.W. A Data-Driven Approximation of the Koopman Operator: Extending Dynamic Mode Decomposition. J. Nonlinear Sci. 2015, 25, 1307–1346. [Google Scholar] [CrossRef]
- Hou, T.; Tang, L.; Niu, H.X. Data-driven Speed Compound Control of High-speed Train. J. Transp. Syst. Eng. Inf. Technol. 2023, 23, 1307–1346. [Google Scholar]
- Shi, J.; Fang, W.S.; Wang, Y.J.; Zhao, Y. Measurements and analysis of track irregularities on high speed maglev lines. J. Zhejiang Univ.-Sci. A 2014, 15, 385–394. [Google Scholar] [CrossRef]
- Sun, Y.G.; He, Z.Y.; Xu, J.Q.; Sun, W.; Lin, G.B. Dynamic analysis and vibration control for a maglev vehicle-guideway coupling system with experimental verification. Mech. Syst. Signal Process. 2023, 15, 109954. [Google Scholar] [CrossRef]
- Liu, M.B.; Ye, F.; Zeng, G.F. Research of the track irregularity spectrum of Shanghai high-speed transrapid demonstration line. Veh. Syst. Dyn. 2024, 62, 2054–2078. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type of Controller | Maximum Offset | Integral Absolute Error |
|---|---|---|
| PID (By experience) | −0.93~1.16 mm | 2.554 |
| Data-Driven (Without ESO) | −0.85~1.01 mm | 2.164 |
| Data-Driven (With ESO) | −0.28~0.28 mm | 0.897 |
| Symbol | Parameter | Value |
|---|---|---|
| A | Area of Magnet Pole | 0.115 m2 |
| N | Number of Turns of Magnet | 270 |
| Mass of Magnet | 300 kg | |
| Mass of Suspension Chassis | 450 kg | |
| Mass of Vehicle Body | 2000 kg | |
| Rigidity of Air Spring | N/m | |
| Damping of Air Spring | N·s/m | |
| Rigidity of Plate Spring | N/m | |
| Damping of Plate Spring | N·s/m |
| Model Parameter | Maximum Offset | Integral Absolute Error |
|---|---|---|
| Offline Data-Driven | −3.12~2.10 mm | 6.813 |
| Online Rolling-Update | −2.24~1.64 mm | 4.374 |
| Model Parameter | Maximum Acceleration | Variance |
|---|---|---|
| Offline Data-Driven | −0.7678~0.5884 m/s2 | 0.0435 (m/s2)2 |
| Rolling-Update | −0.4638~0.3177 m/s2 | 0.0159 (m/s2)2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, P.; Xu, J.; Rong, L.; Wang, W.; Sun, Y.; Lin, G. Data-Driven Control Method Based on Koopman Operator for Suspension System of Maglev Train. Actuators 2024, 13, 397. https://doi.org/10.3390/act13100397
Han P, Xu J, Rong L, Wang W, Sun Y, Lin G. Data-Driven Control Method Based on Koopman Operator for Suspension System of Maglev Train. Actuators. 2024; 13(10):397. https://doi.org/10.3390/act13100397
Chicago/Turabian StyleHan, Peichen, Junqi Xu, Lijun Rong, Wen Wang, Yougang Sun, and Guobin Lin. 2024. "Data-Driven Control Method Based on Koopman Operator for Suspension System of Maglev Train" Actuators 13, no. 10: 397. https://doi.org/10.3390/act13100397
APA StyleHan, P., Xu, J., Rong, L., Wang, W., Sun, Y., & Lin, G. (2024). Data-Driven Control Method Based on Koopman Operator for Suspension System of Maglev Train. Actuators, 13(10), 397. https://doi.org/10.3390/act13100397