
Soft Robotic System with Continuum Manipulator and Compliant Gripper: Design, Fabrication, and Implementation


Abstract
1. Introduction
- Material selection and fabrication: We demonstrate that readily available, low-cost materials like PLA (for structural components) and Ecoflex silicone (for soft actuators) can create high-performance robotic systems. Our use of FDM and SLA 3D printing showcases the versatility of additive manufacturing in this domain [14,26];
- Hybrid control strategies: By combining pneumatic actuation for the gripper with tendon-driven control for the manipulator, we strike a balance between the inherent compliance of pneumatics and the precision of motor-driven systems. This approach contributes to the ongoing discussion on control strategies for soft robots [10,27,28].
- Performance prediction and validation: Through a combination of FEA for soft components and kinematic simulations for the manipulator [29], we establish a framework for predicting and validating system performance. This model-driven approach accelerates design iterations and enhances reliability;
2. Continuum Manipulator with Soft Gripper Motion Analysis
2.1. Design and Operation
2.1.1. Continuum Manipulator
2.1.2. Compliant Gripper
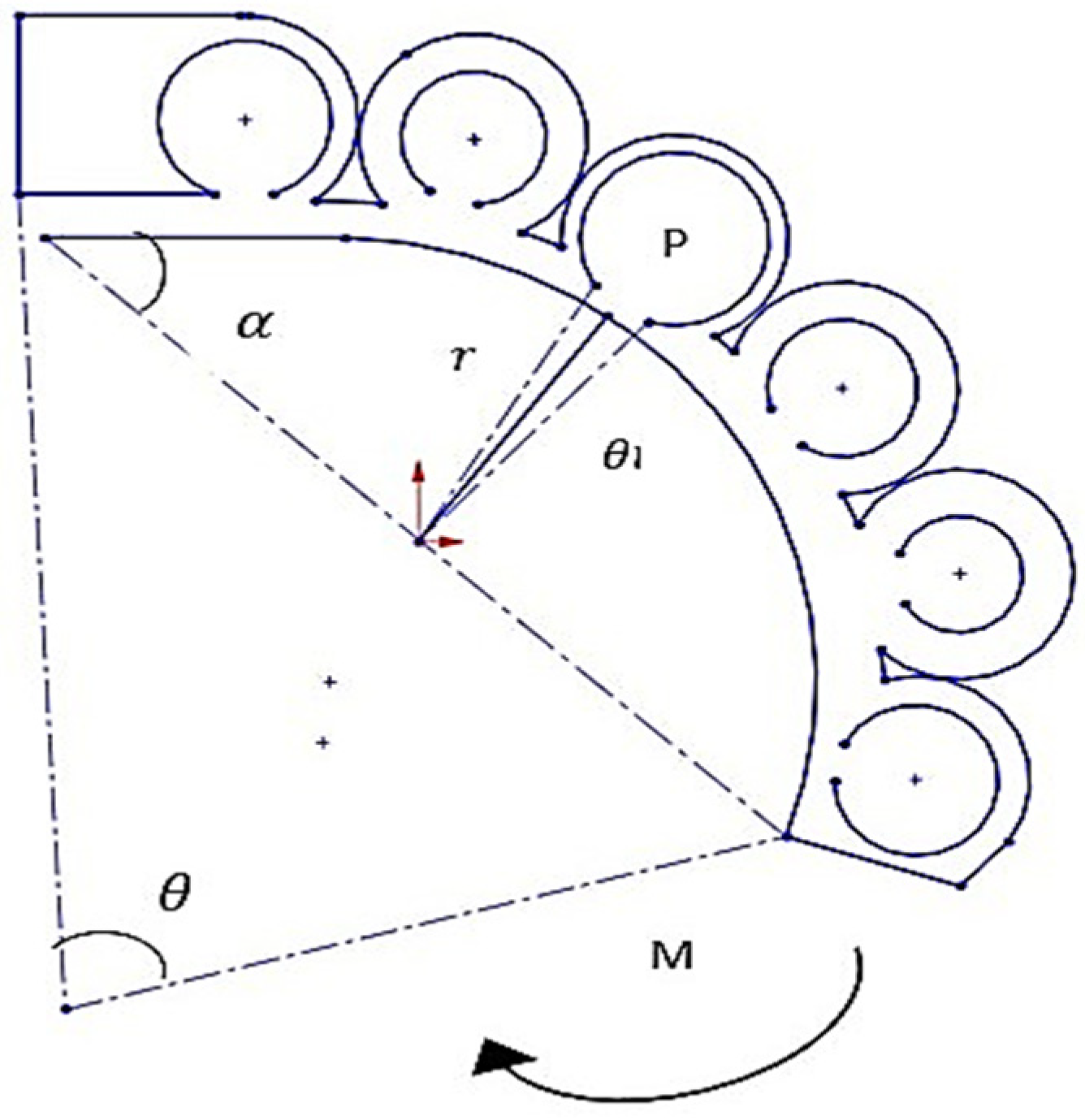
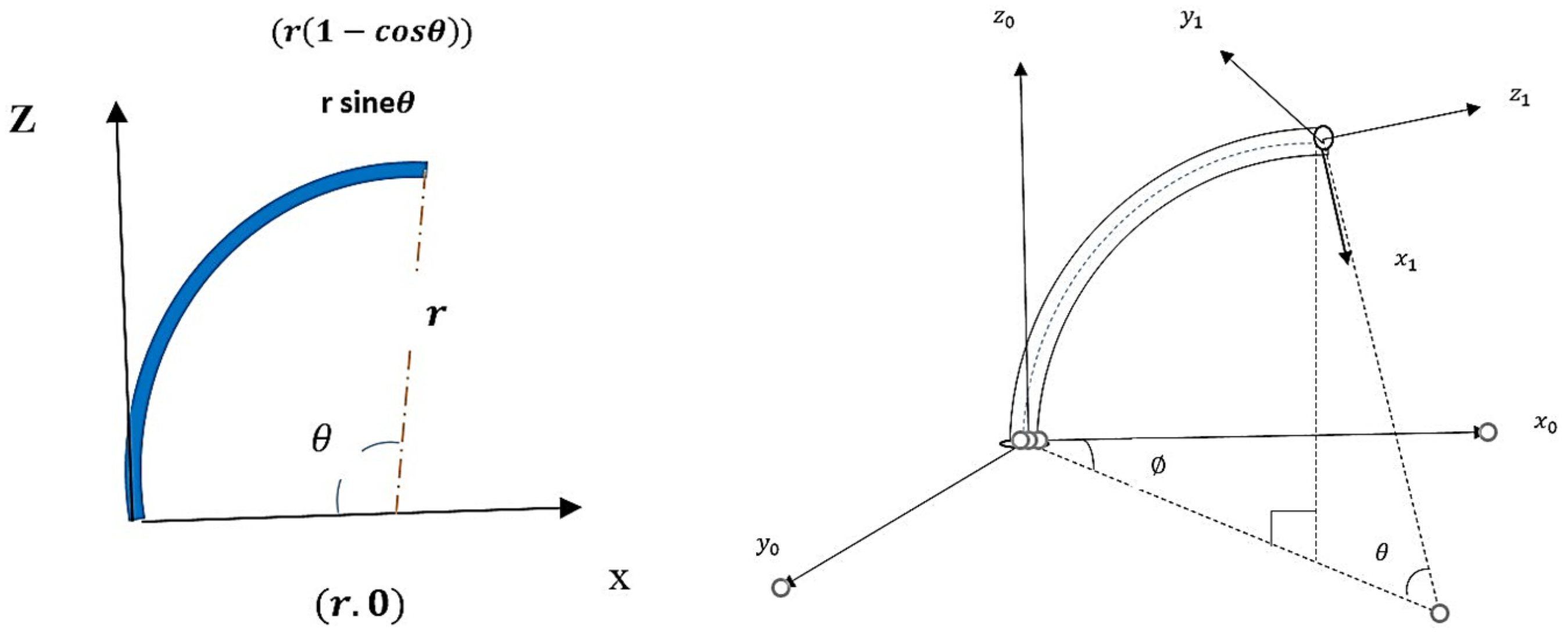
2.2. Kinematic Model
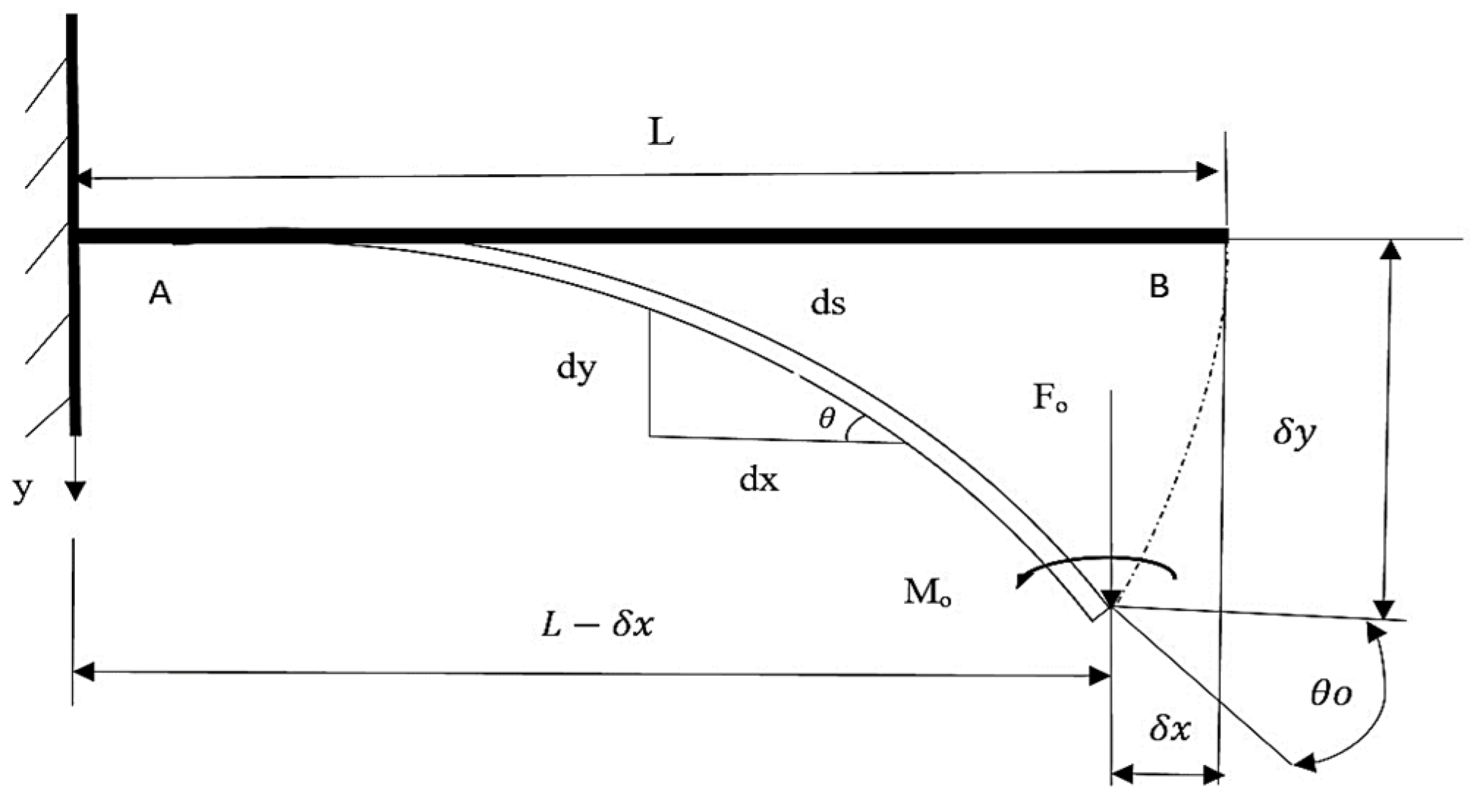
2.3. Dynamic Model
2.4. Integration of Continuum Manipulator and Soft Gripper Model
3. Experimental Setup and Methodology for Continuum Manipulator with Soft Gripper
3.1. Design Electrical and Mechanical Diagrams
3.1.1. Mechanical Diagram of the Pneumatic System
- Air compressor: Provides pressurized air;
- Air reservoir: Stores compressed air to maintain consistent pressure;
- Pressure regulator: Adjusts and maintains the desired air pressure;
- Solenoid valves: Control the airflow to individual pneumatic actuators;
- Pneumatic tubing: Transports pressurized air from the valves to the actuators;
- Continuum manipulator segments: Soft pneumatic chambers that enable bending and extension;
- Compliant gripper: Soft pneumatic fingers for grasping objects.

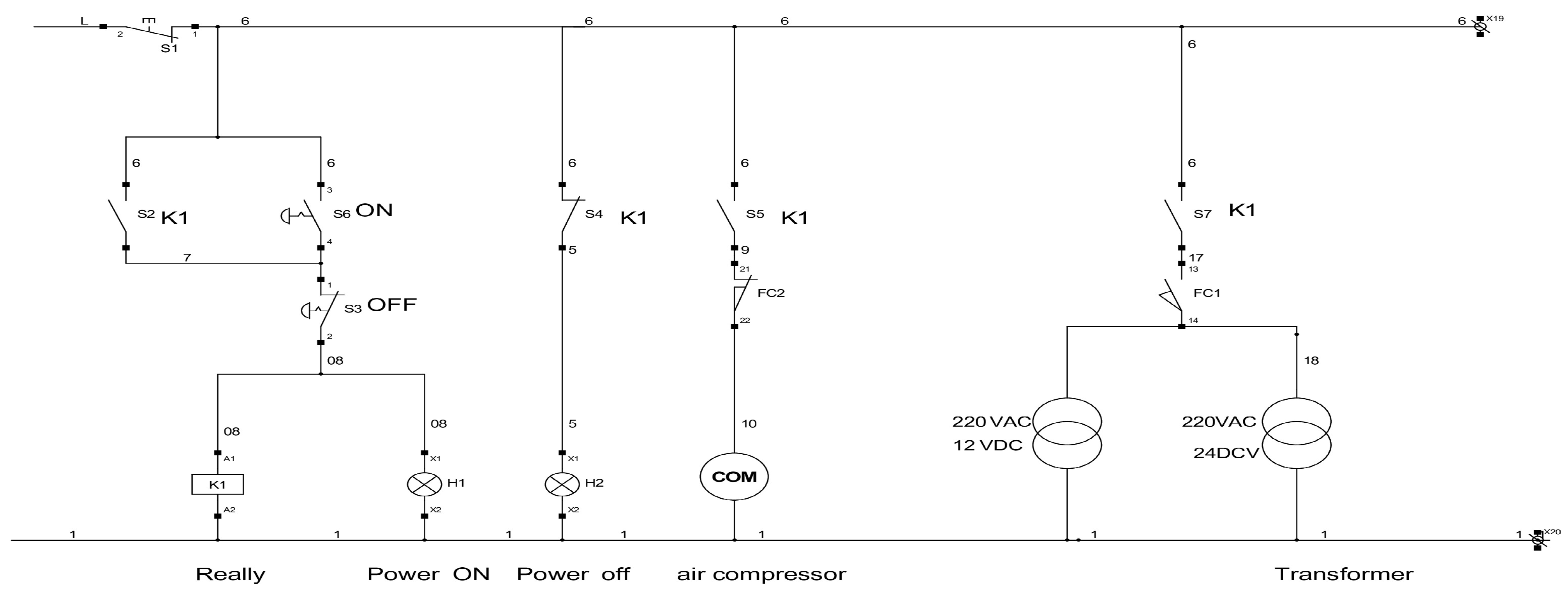
3.1.2. Electrical Diagram of the Power Supply
- AC power inlet: Connects to the mains electricity (110 V/220 V AC);
- Power switch: Turns the system on/off;
- Fuse: Protects against overcurrent;
- Transformer: Steps down AC voltage to a suitable level for our components;
- Bridge rectifier: Converts AC to DC;
- Voltage regulators: Provide stable DC voltages (e.g., 12 V for valves, 5 V for microcontroller);
- Capacitors: Filter and smooth the DC output;
- Power distribution bus: Distributes power to various components.
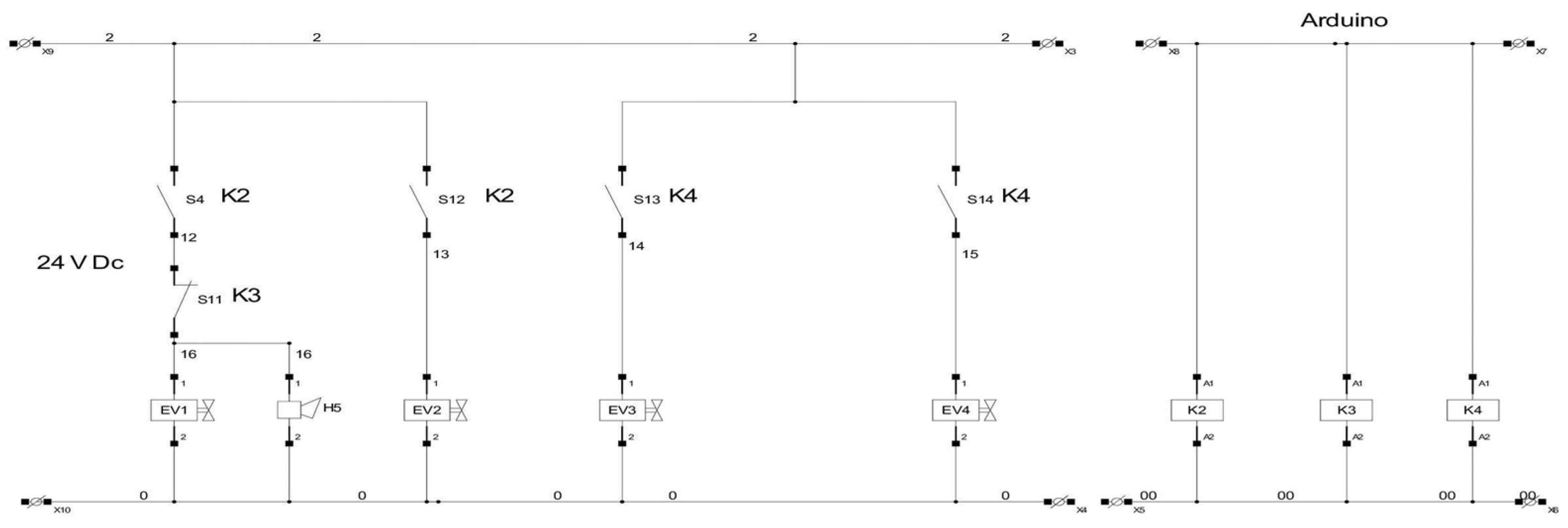
3.1.3. Electrical Diagram of the Pneumatic Control
- Microcontroller (e.g., Arduino): Processes control signals and manage valve timing;
- Pressure sensors: Monitor air pressure in the actuators for feedback control;
- Solenoid valve drivers: Amplify the microcontroller’s signals to switch the valves;
- Solenoid valves: Electrically controlled valves that direct air to the actuators;
- PWM (Pulse-Width Modulation) lines: Allow variable control of valve opening;
- Analog inputs: Read pressure sensor data;
- Digital I/O: Interface with additional sensors or indicators.
3.1.4. Electrical Diagram of the Control Panel
- LCD display: Shows system status, pressure readings, and mode information;
- Rotary encoders: Allow manual adjustment of pressure or position setpoints;
- Pushbuttons: Select operation modes (e.g., manual, automated sequences);
- Joystick: Provides intuitive control of the continuum manipulator’s bending;
- Emergency stop button: Immediately depressurizes all actuators for safety;
- Status LEDs: Indicate power, valve states, and any error conditions;
- Communication interfaces: USB/Serial for programming and data logging.

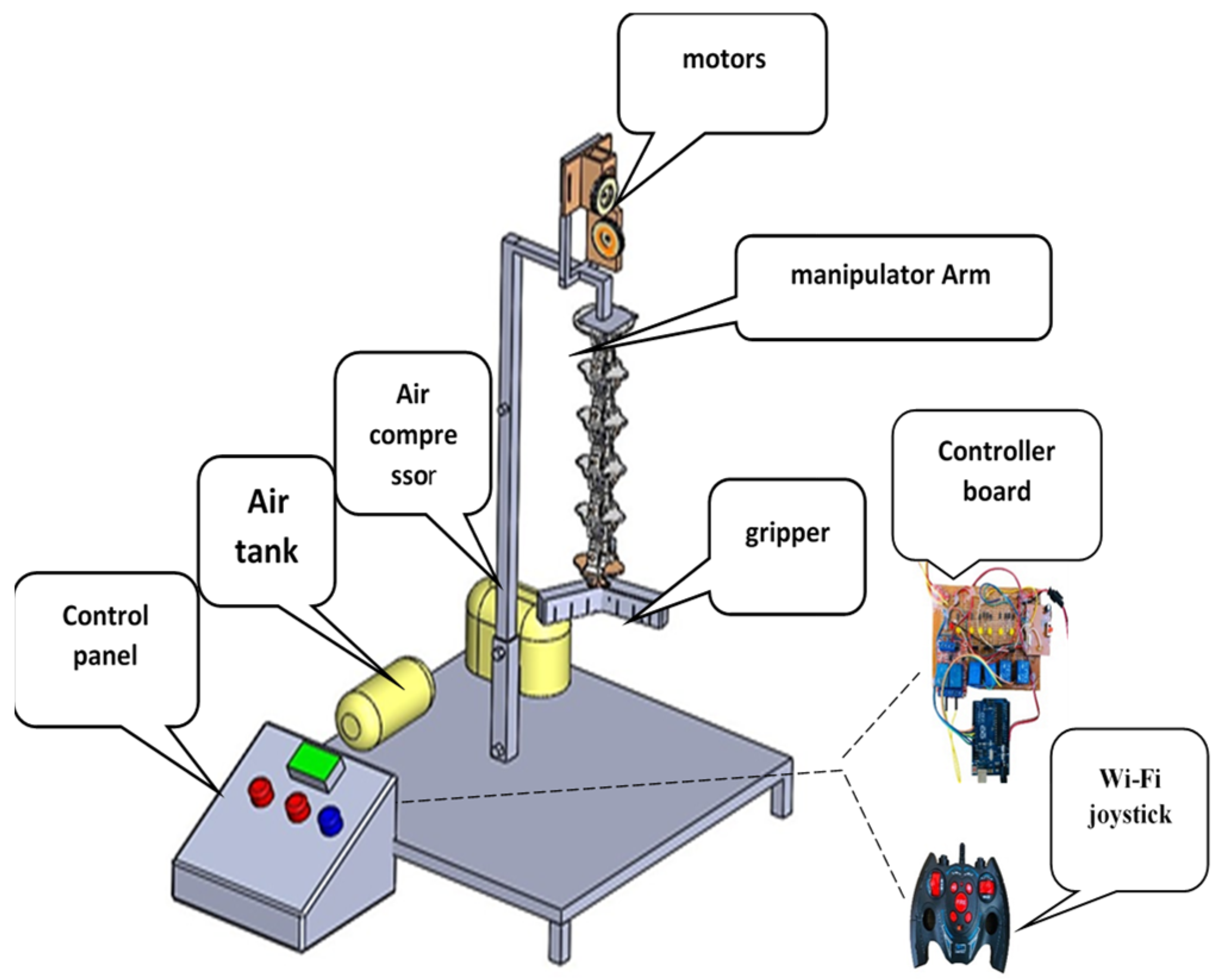
3.2. Design the Structure, Gripper Molds, and Manipulator Arm Parts
3.2.1. Overview of Designed Components
- Metal structure: Forms the backbone, with provisions for mounting all subsystems;
- Manipulator arm stand: Elevates and orients the continuum arm;
- Gripper mount: Located at the manipulator’s end-effector;
- Tendon routing: Paths for strings actuating the manipulator;
- Motor mounts: Positions for tendon actuation motors;
- Control panel: User interface for system operation;
- Pneumatic components: Compressor, valves, and tubing, organized for easy access;
- Electrical enclosure: Houses power supply and control electronics.
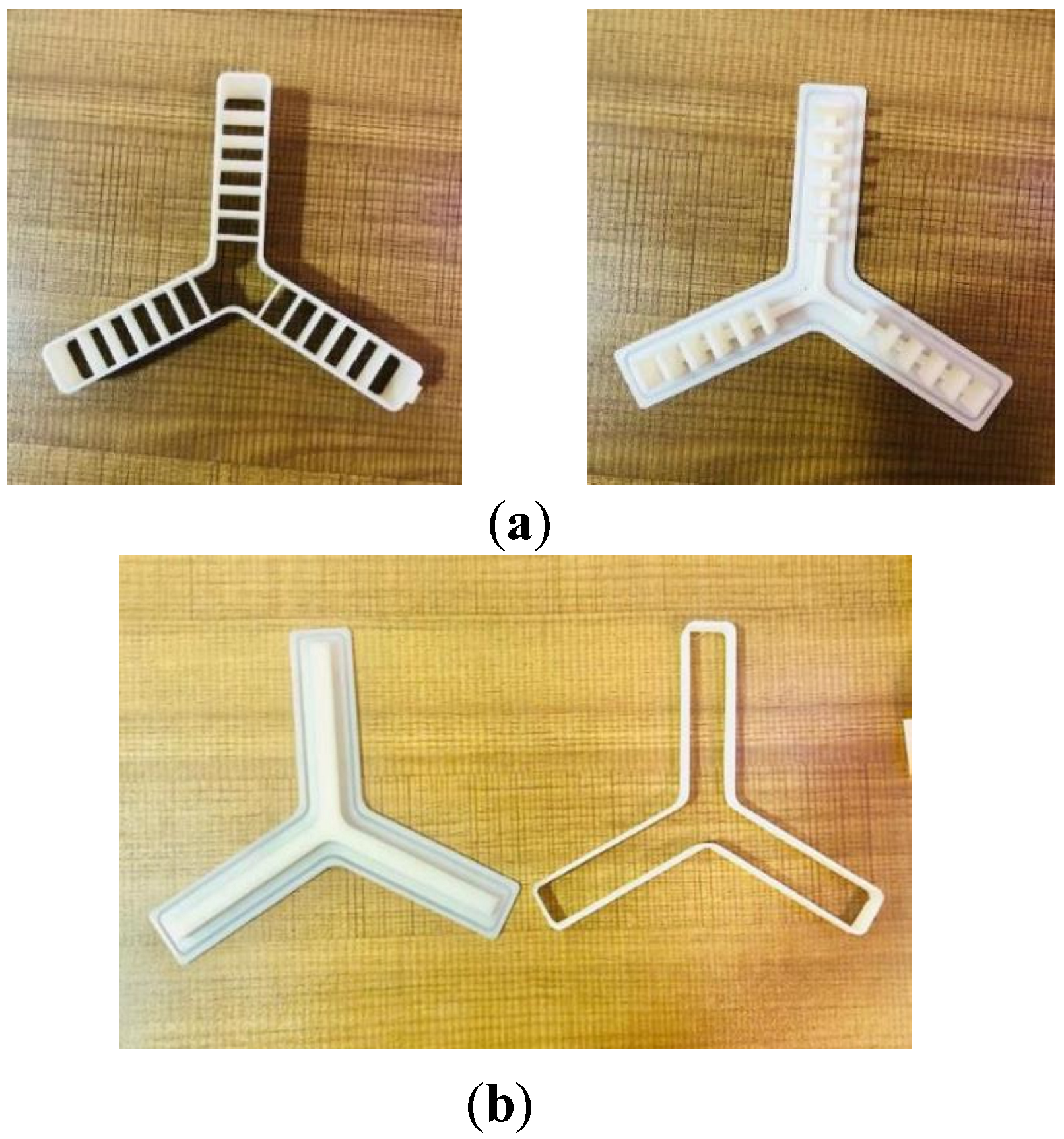
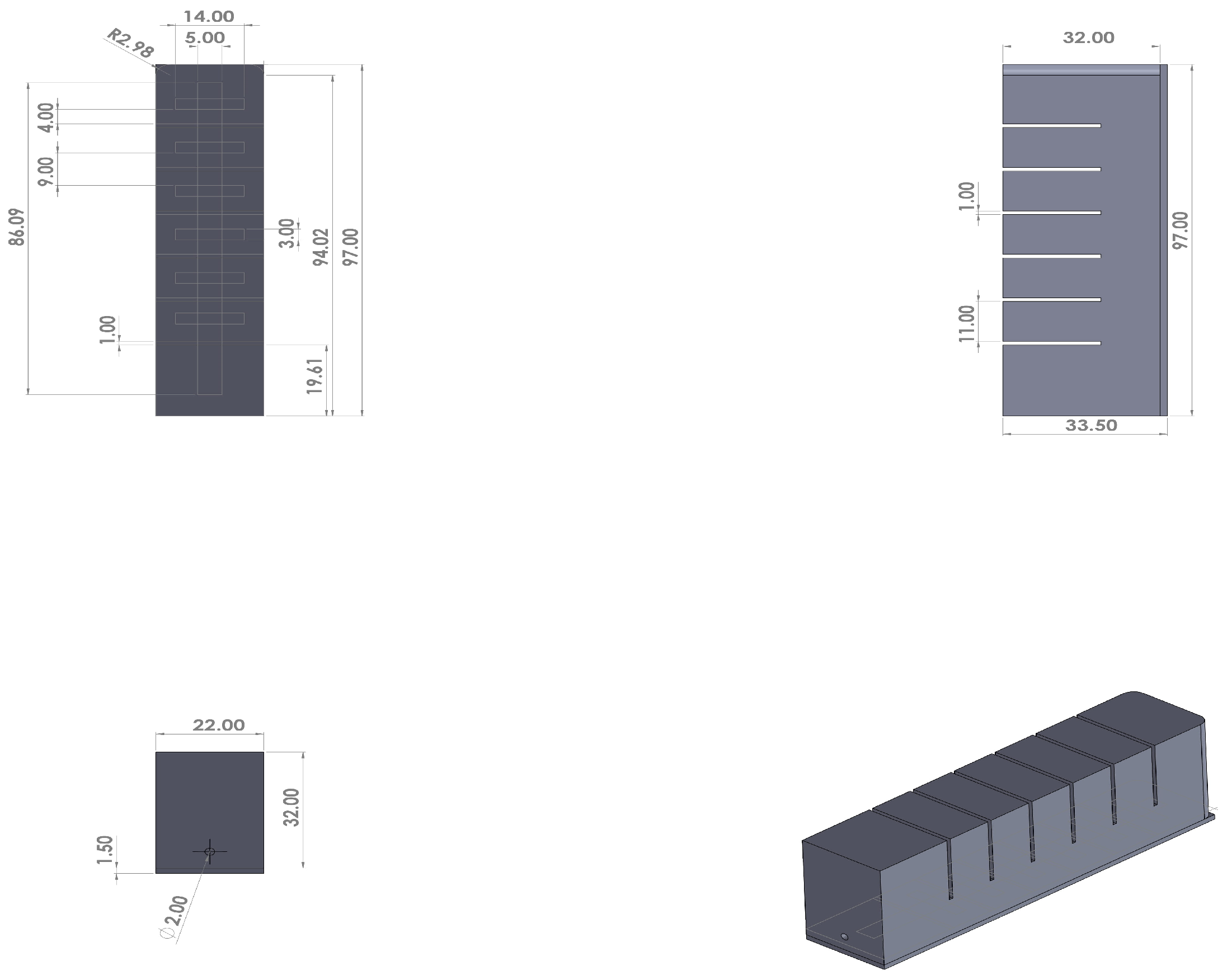
3.2.2. Single-Finger Casting Mold Design
- (a)
- P1 bottom mold: Forms the lower part of the finger’s first segment;
- (b)
- P2 bottom mold: Creates the lower part of the second segment;
- (c)
- P1P2 assembly: Alignment of P1 and P2 for a seamless two-segment finger;
- (d)
- Upper mold: Forms the top of both segments, including pneumatic channels;
- (e)
- Gripper holder: Interfaces with the manipulator, securing all three fingers;
- (f)
- Single-finger casting mold design.
3.2.3. Continuum Manipulator Arm Components
- (a)
- Vertebrae assembly: This shows how all vertebrae interlock to form the complete manipulator. The central holes align to form a conduit for pneumatic tubing or additional tendons;
- (b)
- End vertebra: A solid disc with two arms guiding tendons, which are connected to a part with a central hole. This interlocks with a hollow cylinder that secures the gripper rod.
- (c)
- Vertebra 1: Similar to the end vertebra but without the gripper mount. Its solid disc and two arms guide tendons to the next segment;
- (d)
- Vertebrae 2–5: The main body of the manipulator. Each is a solid disc with two tendon-guiding arms connected to a part with a central hole for interlocking;
- (e)
- Connecting pin;
- (f)
- Solid pulleys: There are two tracks in which for winding the strings.

- (a)
- Modularity: Each vertebra is identical except for the ends, simplifying manufacturing and assembly;
- (b)
- Tendon routing: Arms guide tendons along the manipulator’s length, minimizing friction;
- (c)
- Interlocking: Central holes allow vertebrae to connect securely while permitting flexure;
- (d)
- Customization: The number of vertebrae can be easily adjusted for different reach requirements.
- Material choice: Tough 2000 resin withstands the heat and pressure of silicone casting;
- Surface finish: Post-processing (sanding, polishing) ensures smooth finger surfaces;
- Alignment features: Pins and slots guarantee precise mold alignment;
- Venting: Small channels prevent air pockets in the cast silicone.
3.3. Fabricate Structure, Gripper Molds, and Manipulator Arm Parts
3.3.1. Fabrication of Metal Structure
- (a)
- Manufacture of metal structure parts: Using the SolidWorks designs, we use CNC-machined aluminum alloy (6061-T6) for its high strength-to-weight ratio and corrosion resistance. Parts include the following:
- Base plate: Provides a stable foundation;
- Vertical supports: Elevate and orient the manipulator arm;
- Cross-members: Add rigidity and support for subsystems;
- Mounting brackets: For attaching motors, control panels, and pneumatics.
- (b)
- Assembling parts of the metal structure: Components were assembled using the following:
- Threaded fasteners (M5 bolts) for easy disassembly;
- Dowel pins for precise alignment;
- T-slot extrusions for adjustable component mounting.

3.3.2. Fabrication of Gripper Molds
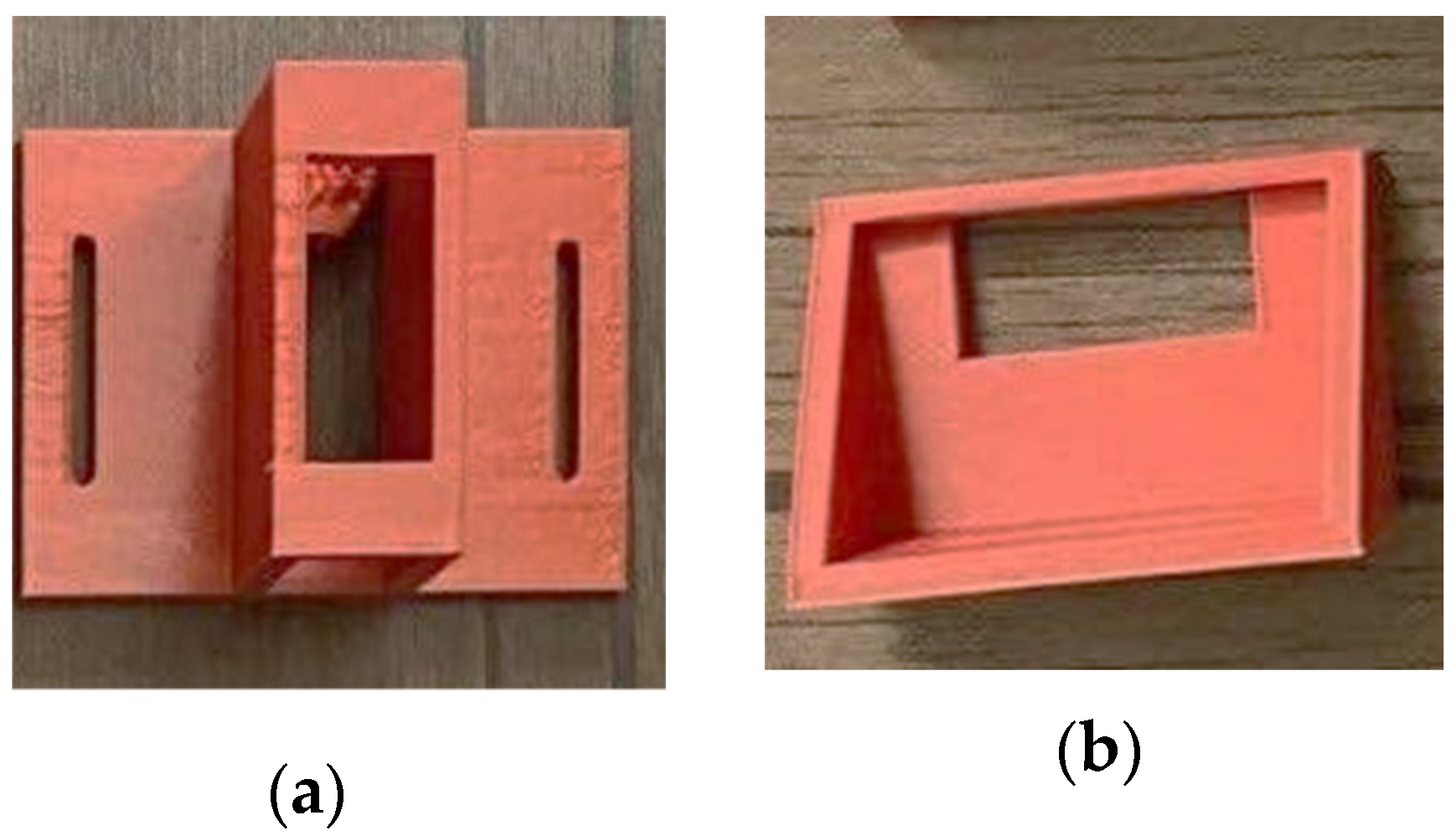
- (a)
- Bottom casting mold for No. 1 mold: This mold forms the lower part of the first finger segment. It was 3D-printed using a high-resolution SLA printer (Form 3, Formlabs) with Tough 2000 resin for durability and detail;
- (b)
- Upper mold casting of No. 1 mold: Complementing the bottom mold, it forms the upper part of the first finger segment, including channels for pneumatic actuation. This is also 3D-printed using the same process.
3.3.3. Fabrication of Manipulator Arm Parts
- (a)
- Six arm vertebrae: 3D-printed using an FDM printer (Ultimaker S5) with PLA for its balance of strength and ease of printing. Each vertebra has the following:
- Two arms for tendon routing;
- A central hole for interlocking and pneumatic tubing.
- (b)
- Five joint connections: Flexible segments between vertebrae, cast from Ecoflex 00-30 silicone in 3D-printed molds. These allow omnidirectional bending;
- (c)
- Twenty connecting pins: Small PLA pins that interlock vertebrae and joint connections;
- (d)
- Assembly of parts: Vertebrae, joints, and pins are assembled in an alternating pattern to form the manipulator arm.

- Material: Aluminum for low inertia and wear resistance;
- Features: Central bore interlocks with motor gears, secured by a set screw through a small hole;
- Function: One pulley for X-axis and one pulley for Z-axis motion to guide tendons.

- (a)
- Base for Z-axis motor: CNC-milled aluminum, with slots for adjustable motor positioning;
- (b)
- Base for X-axis motor: Similar design, but it is oriented for X-axis tendon routing.
3.3.4. Fabrication Summary
- CNC machining: For high-precision metal parts (structure, motor mounts);
- Three-dimensional printing:
- SLA for detailed molds (gripper);
- FDM for structural parts (manipulator vertebrae).
- Silicone casting: For soft, flexible components (gripper fingers, manipulator joints);
- Assembly: Using mechanical fasteners, pins, and interlocking geometries.
3.4. The Process of Pouring Silicone into Molds
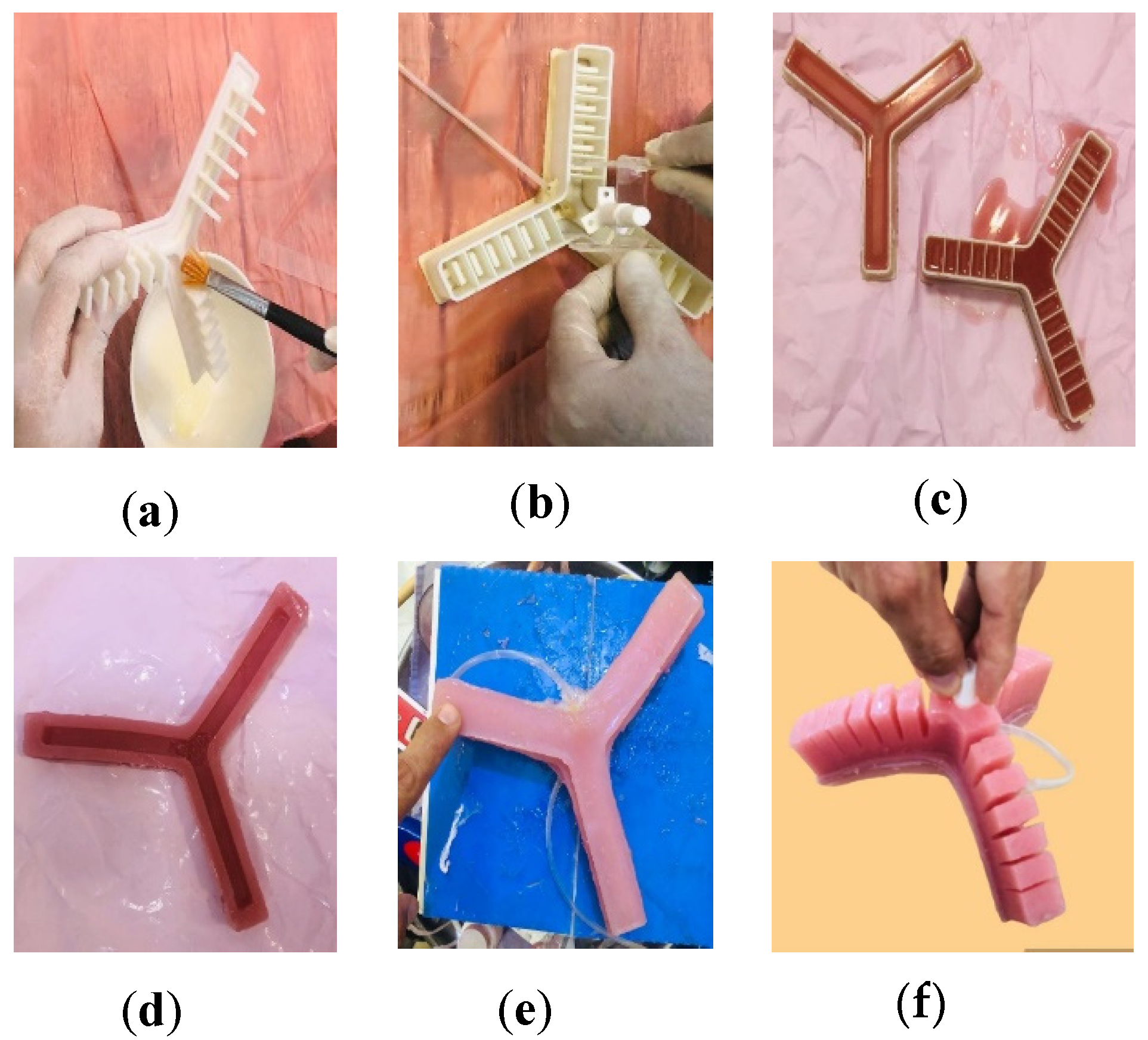
3.4.1. Casting the Soft Gripper Fingers
- (a)
- Insulating the mold walls: To facilitate easy demolding, we applied a thin layer of mold-release agent (Mann Ease Release 200) to all mold surfaces. This step is crucial to prevent the silicone from bonding to the 3D-printed molds;
- (b)
- Assembling the mold: The bottom and top molds for each finger segment were carefully aligned using the built-in pins and slots. This process ensures that the pneumatic channels in the upper mold align perfectly with the finger geometry in the lower mold;
- (c)
- Pouring silicone: We used Ecoflex 00-30 silicone for its high flexibility and tear resistance. The two-part silicone was mixed in a 1:1 ratio, degassed in a vacuum chamber to remove air bubbles, and then poured slowly into the assembled mold through the provided inlet. The mold’s venting channels allow air to escape, preventing voids;
- (d)
- Gripper extraction: After curing at room temperature for 4 h (or 30 min at 60 °C for faster production), the molds carefully separate. The soft finger segment was gently removed, taking care not to tear the delicate pneumatic channels;
- (e)
- Assembling gripper parts: Two-finger segments bond using a thin layer of uncured Ecoflex, creating a seamless two-segment finger. Three fingers were then attached to the gripper base (also cast in silicone) to form the complete gripper;
- (f)
- Final gripper assembly: The completed three-fingered gripper showcases the effectiveness of our molding process. Each finger can bend independently when pressurized, allowing for adaptive grasping of various objects.
3.4.2. Assembling the Manipulator Actuation System
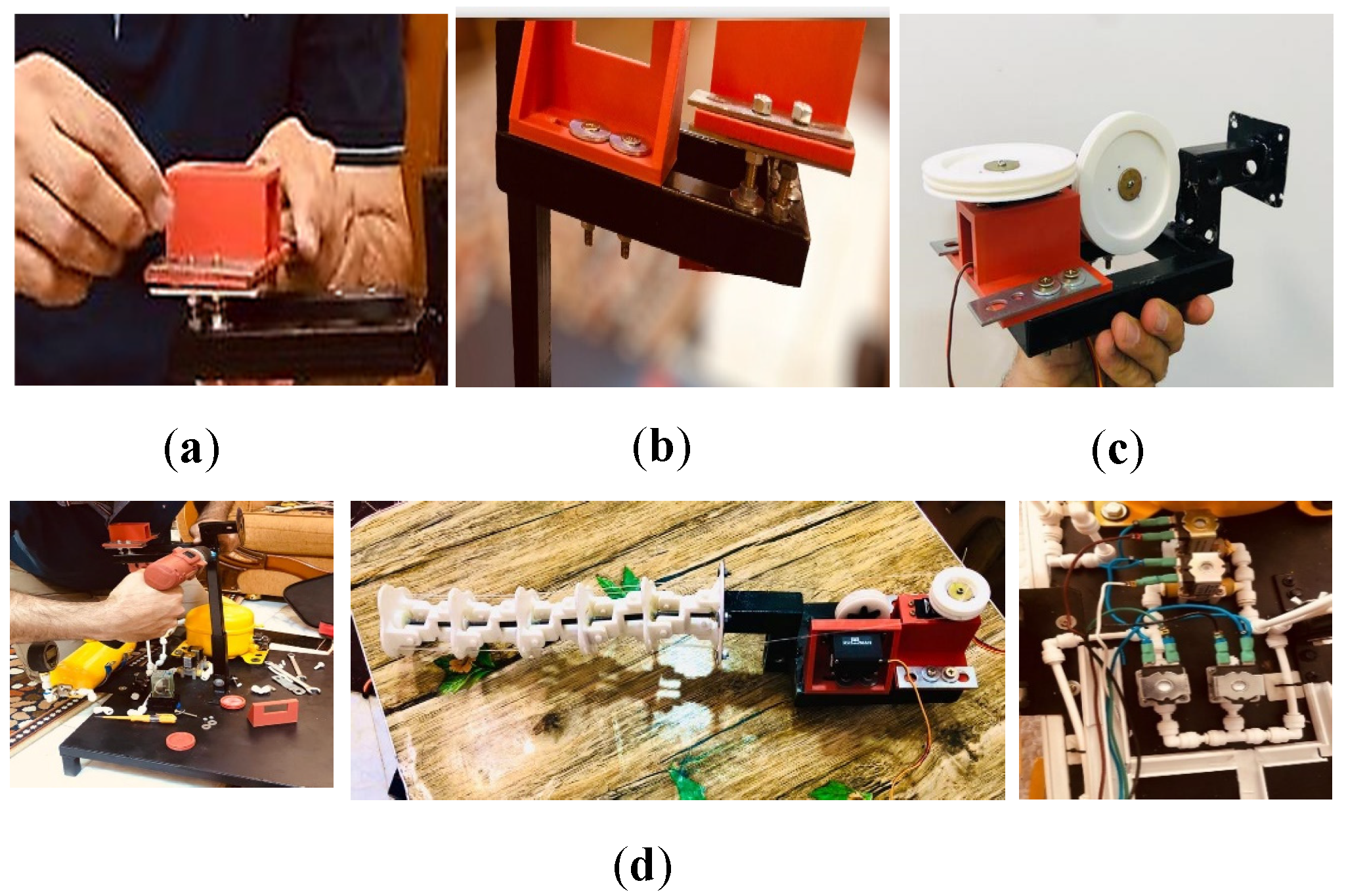
- (a)
- Mounting X-axis drive base: The CNC-machined aluminum base was bolted to the metal structure, with slotted holes allowing fine adjustment of the X-axis motor position;
- (b)
- Mounting Z-axis motor base: Similarly, the Z-axis motor base was mounted and oriented to guide tendons for vertical manipulator movement;
- (c)
- Motor and pulley installation: The high-torque stepper motors (NEMA 17) were secured to their respective bases. The custom aluminum pulleys were press-fit onto the motor shafts and locked with set screws, ensuring no slippage during operation;
- (d)
- Tendon routing: Dyneema fishing line (150 lb. test) was used for tendons due to its high strength and low stretch. The line was threaded through the manipulator’s vertebrae arms, over the pulleys, and finally secured to the motor shafts. Precise tendon length and tension are critical for accurate manipulator control.
3.4.3. Integration of Soft and Rigid Components
- Gripper–manipulator interface: The silicone gripper base interlocks with the end vertebra, allowing pneumatic and tendon lines to pass through;
- Vertebrae–joint connections: PLA pins lock vertebrae to soft silicone joints, balancing flexibility with the structure needed for tendon guidance;
- Tendon termination: Tendons are knotted and embedded in the end vertebra, distributing forces evenly across the manipulator;
- Pneumatic integration: Silicone tubes for gripper actuation are routed through the central channel of the manipulator vertebrae, exiting near the motor bases to connect with solenoid valves.
3.5. Assembly of Parts
3.5.1. Integration of Control Components
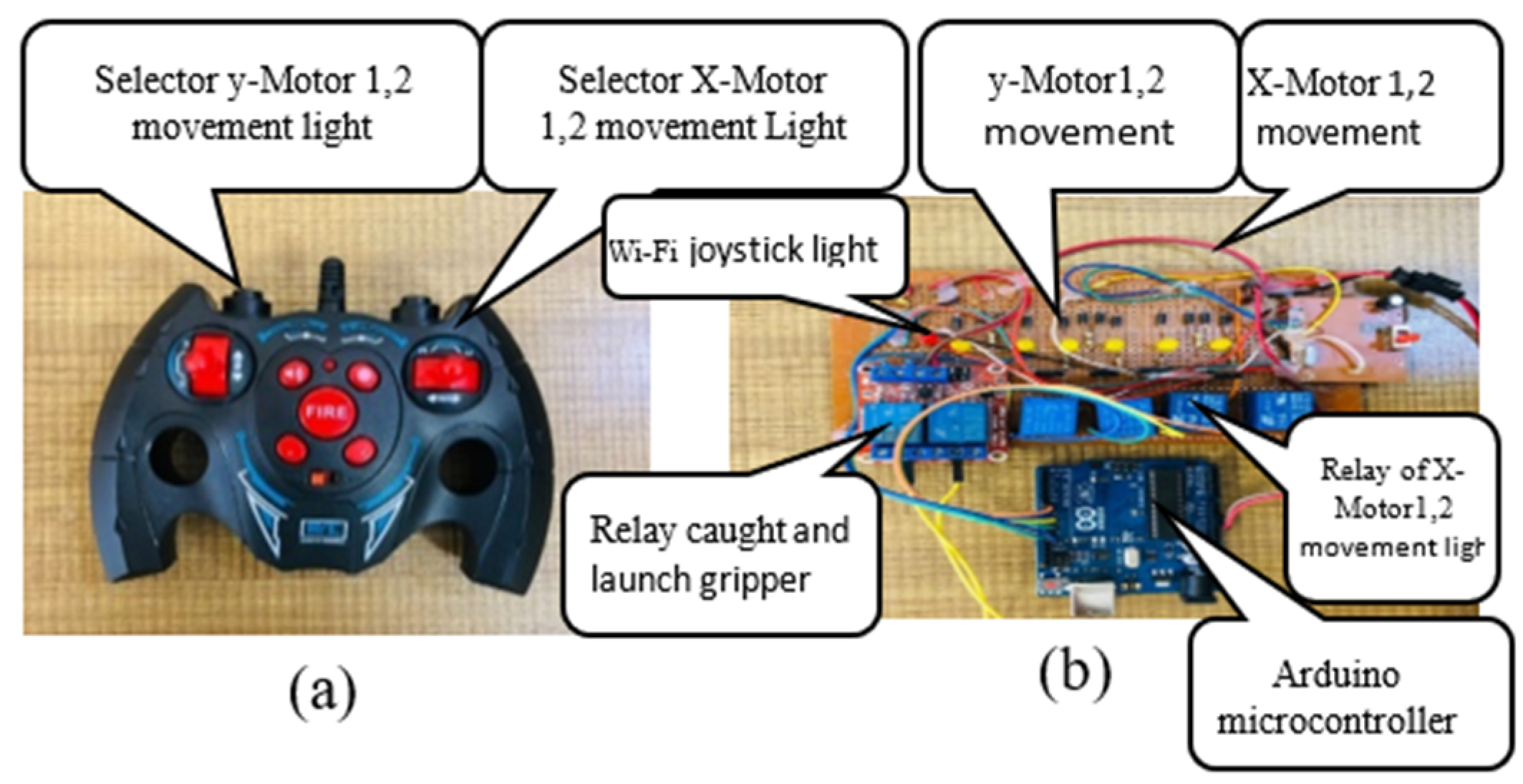
- (a)
- Remote control board (joystick): We incorporated a dual-axis joystick with additional buttons for intuitive control of the continuum manipulator. Features include the following:
- X-axis: Controls left-right bending of the manipulator;
- Y-axis: Manages forward–backward bending;
- Buttons: Activate gripper open/close functions and preset manipulator poses;
- Material: Durable ABS plastic housing for longevity;
- Interface: Connected to the Arduino via a shielded cable to minimize noise.
- (b)
- Arduino microcontroller board: At the heart of our control system is an Arduino Mega 2560, which was chosen for its ample I/O capabilities. Key aspects include the following:
- Fifty-four digital I/O pins: Sufficient for driving stepper motors, solenoid valves, and reading joystick inputs;
- Sixteen analog inputs: Used for pressure sensors in the gripper and manipulator joints;
- A 16 MHz clock: Provides adequate processing power for real-time control;
- EEPROM: Stores calibration data and preset manipulator configurations;
- USB interface: Facilitates easy programming and data logging.
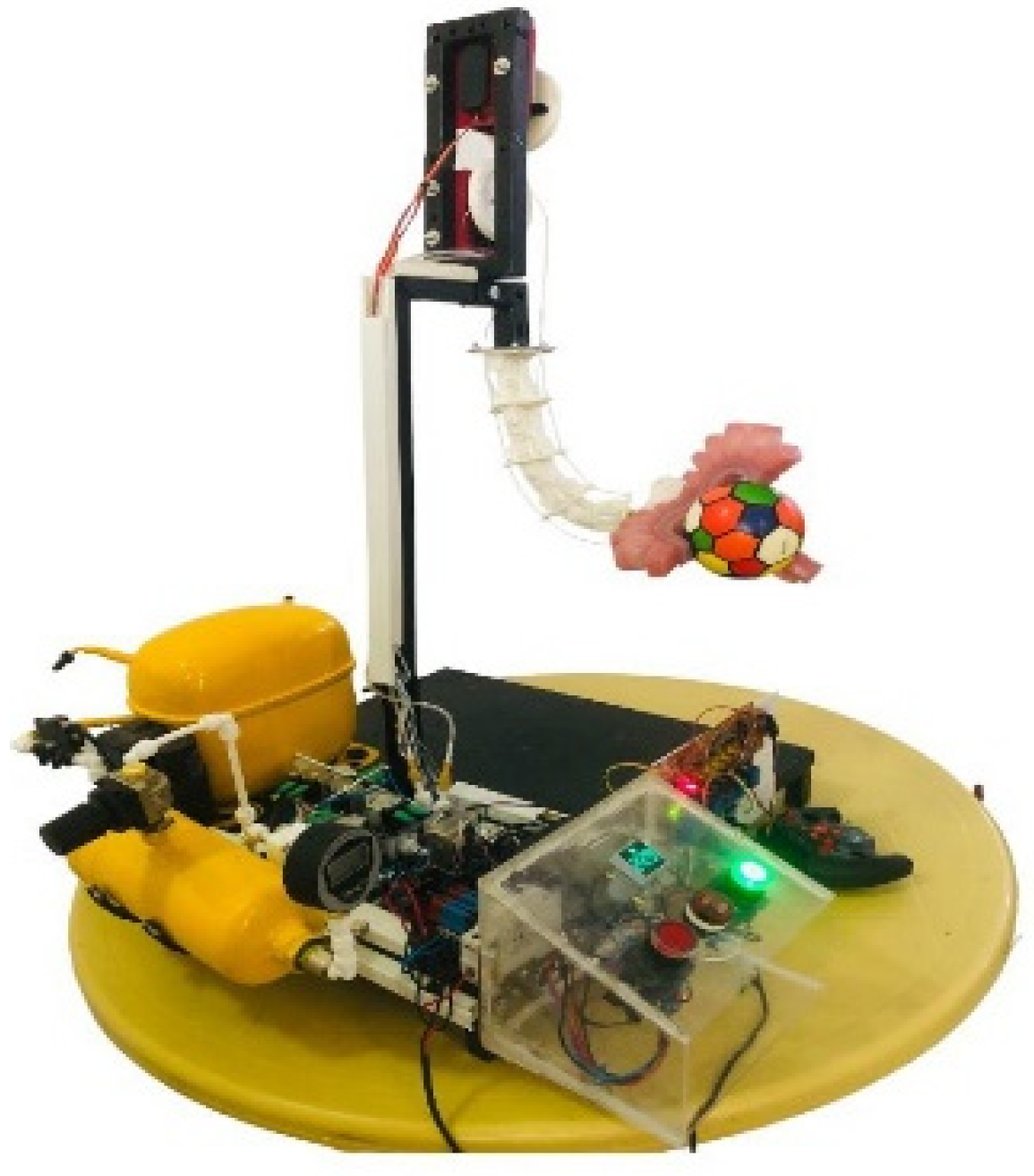
3.5.2. Final System Assembly
- Metal structure: Forms the rigid backbone, with all components securely mounted;
- Continuum manipulator: Vertebrae and soft joints create a flexible arm, with tendons visibly routed through guiding arms;
- Soft gripper: Mounted at the manipulator’s end, showcasing its three-fingered design;
- Motor mounts and pulleys: Positioned for optimal tendon routing, with stepper motors visible;
- Pneumatic components: Compressors, valves, and tubing are neatly organized for easy access and maintenance;
- Control panel: Houses the Arduino, power distribution, and user interface elements;
- Safety features: An emergency stop button and cable management are used to prevent entanglement.
3.5.3. Manufacturing Process Overview
- Three-dimensional modeling (CAD):
- SolidWorks is used for all components: structure, molds, and vertebrae;
- The iterative design process is informed by simulations and preliminary tests.
- Rigid component fabrication:
- CNC machining: Aluminum parts (structure, motor mounts) for precision.
- Three-dimensional printing (FDM): PLA vertebrae and connectors;
- Three-dimensional printing (SLA): High-detail molds for soft components.
- Soft component fabrication:
- Mold preparation: Release agent application;
- Silicone mixing: Ecoflex 00-30 for gripper and joints;
- Casting: Pour silicone into molds and degas to remove bubbles;
- Curing: Room temperature or accelerated with heat;
- Demolding and assembly: Join gripper segments and attach them to the manipulator.
- Mechatronic integration:
- Motor and pulley assembly: Align and secure to mounts;
- Tendon routing: Thread through the vertebrae and over the pulleys;
- Pneumatic setup: Connect tubing, valves, and compressor;
- Sensor integration: Pressure sensors in gripper and joints.
- Control system assembly:
- Arduino setup: Mount and connect power;
- Peripheral connections: Joystick, valves, motors, and sensors;
- User interface: Assemble the control panel with display and buttons.
- Calibration and testing:
- Motor calibration: Steps-to-angle conversion for tendons;
- Pressure calibration: Map sensor readings to gripper force;
- Manipulator kinematics: Derive models for tendon lengths vs. pose;
- Functional tests: Verify all motions and fail-safes.
- Final assembly and validation:
- Component integration: Assemble all subsystems on the metal structure;
- Complete system tests: Run through a range of manipulation tasks;
- Performance metrics: Measure accuracy, repeatability, and grasp strength;
- Iterative refinement: Identify and address any shortcomings.

4. Validation and Operation of the Continuum Manipulator with Soft Gripper
4.1. Gripper Practical Experiments and Simulation by ANSYS Software
4.1.1. Practical Experiments
- (a)
- 0 kPa: The finger’s resting state, establishing the baseline for deformation measurements;
- (b)
- 3 kPa: Initial bending becomes visible, with a slight curl toward the finger’s inner channel;
- (c)
- 5 kPa: Bending increases, with the fingertip displacing notably in the negative Y direction;
- (d)
- 7 kPa: Significant bending achieved, which is suitable for grasping curved objects;
- (e)
- 10 kPa: Near-maximum bending, with the fingertip almost touching the base;
- (f)
- 12 kPa: Full actuation, showing the finger’s maximum range of motion.
- Non-linear behavior: The bending rate increases with pressure due to the hyperelastic nature of the silicone;
- Anisotropic deformation: Designed channel geometry causes preferential bending (Y-axis) overextension (Z-axis);
- Repeatability: Multiple trials showed consistent deformation patterns, which is crucial for reliable grasping.
4.1.2. FEA Simulation Setup
- Geometry import: The gripper finger’s CAD model, created in SolidWorks, was imported via STEP format;
- Material definition: Accurately modeling Ecoflex 00-30 silicone is crucial. We defined it as a hyperelastic material using the Yeoh model, which captures large, non-linear deformations. Properties include the following [36,37]:
- Density: 1.045 g/cm3;
- Yeoh third-order coefficients:
- ○
- C10 = 1.27 × 10−2;
- ○
- C20 = 4.23 × 10−4;
- ○
- C30 = −1.45 × 10−6.
- 3.
- Mesh and boundary conditions:
- Fine tetrahedral mesh to capture the finger’s complex internal channels;
- Fixed constraint at the finger base to mimic actual mounting;
- Pressure is applied to the internal surfaces of pneumatic channels.
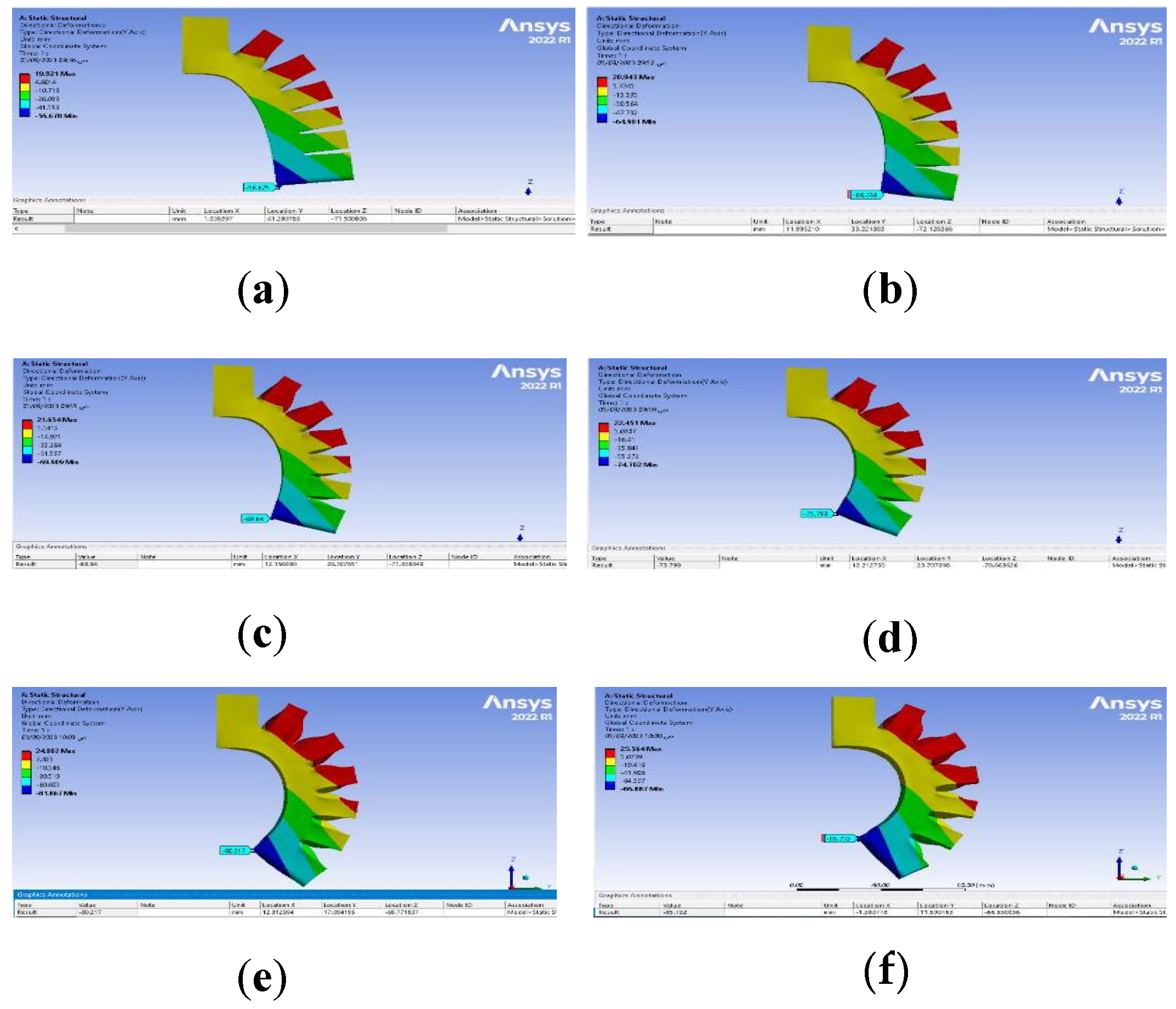
4.1.3. Simulation Results and Validation
- (a)
- Complete finger mesh;
- (b)
- Section view showing internal channels;
- (c)
- Deformation contour plot.
- (a)
- 0 kPa: Undeformed state, matching the physical finger;
- (b)
- 3 kPa: Slight bending, with deformation concentrated near the tip;
- (c)
- 5 kPa: Increased bending, closely matching experimental results;
- (d)
- 7 kPa: Substantial bending, with high strain regions visible;
- (e)
- 10 kPa: Near-maximum bending, validating the accuracy of our material model.
- Quantitative validation: Simulated displacements were within 8% of experimental values across all pressures, validating our FEA model;
- Stress distribution: Simulations revealed higher stresses near channel intersections, guiding future design iterations to enhance durability;
- Predictive power: With a validated model, we can now simulate gripper performance under conditions challenging to test experimentally, such as grasping irregular objects or under varied temperature conditions.
4.1.4. Discussion
- Design optimization: We can rapidly iterate finger designs in silico, minimizing the need for physical prototypes;
- Failure prediction: By identifying high-stress regions, we can reinforce critical areas or adjust actuation pressures to extend the gripper’s lifespan;
- Generalization: The validated modeling approach can be extended to our continuum manipulator, facilitating whole-system optimization.
4.2. Operation and Performance Testing
4.2.1. System Operation
- Power-up and initialization:
- Pressing the power button activates the system, indicated by a green LED;
- This step energizes the microcontroller, motor drivers, and pneumatic valves.
- Object grasping:
- Place the target object (initially a ball) at the manipulator’s base (0, 0, 0);
- Press the “pickup” button on the joystick to initiate grasping;
- Valve A1 opens, pressurizing the upper chambers of the gripper fingers;
- Simultaneously, valve B2 opens to vent the lower chambers;
- An audible alarm and flashing red LED indicate the grasping process;
- A pressure regulator maintains a constant 30 kPa in the chambers, ensuring a secure but gentle grip.
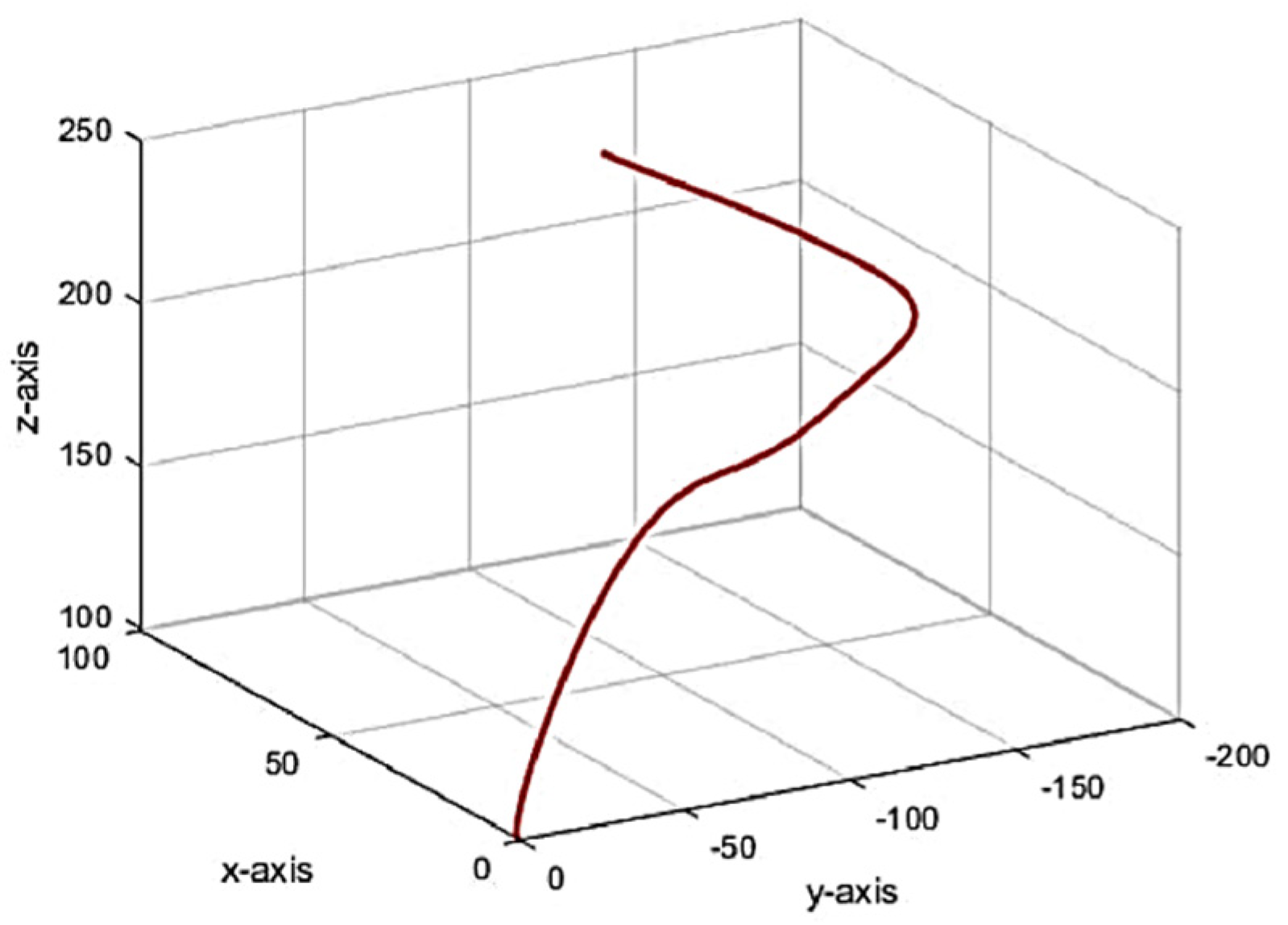
- Manipulator control:
- Using the joystick’s rotary switches for actuators 1 and 2 (corresponding to X- and Z-axes), guide the manipulator;
- The controller coordinates stepper motor rotations to achieve smooth, three-dimensional motion along X-, Y-, and Z-axes;
- This step showcases the manipulator’s dexterity in navigating to the target (200, 112, 245) mm.
- Object release:
- Upon reaching the target, press the “release” button;
- Valve A2 opens to vent the upper finger chambers;
- Valve B1 pressurizes the lower chambers, actively extending the fingers;
- This controlled release ensures the ball is placed, not dropped, into the basket.
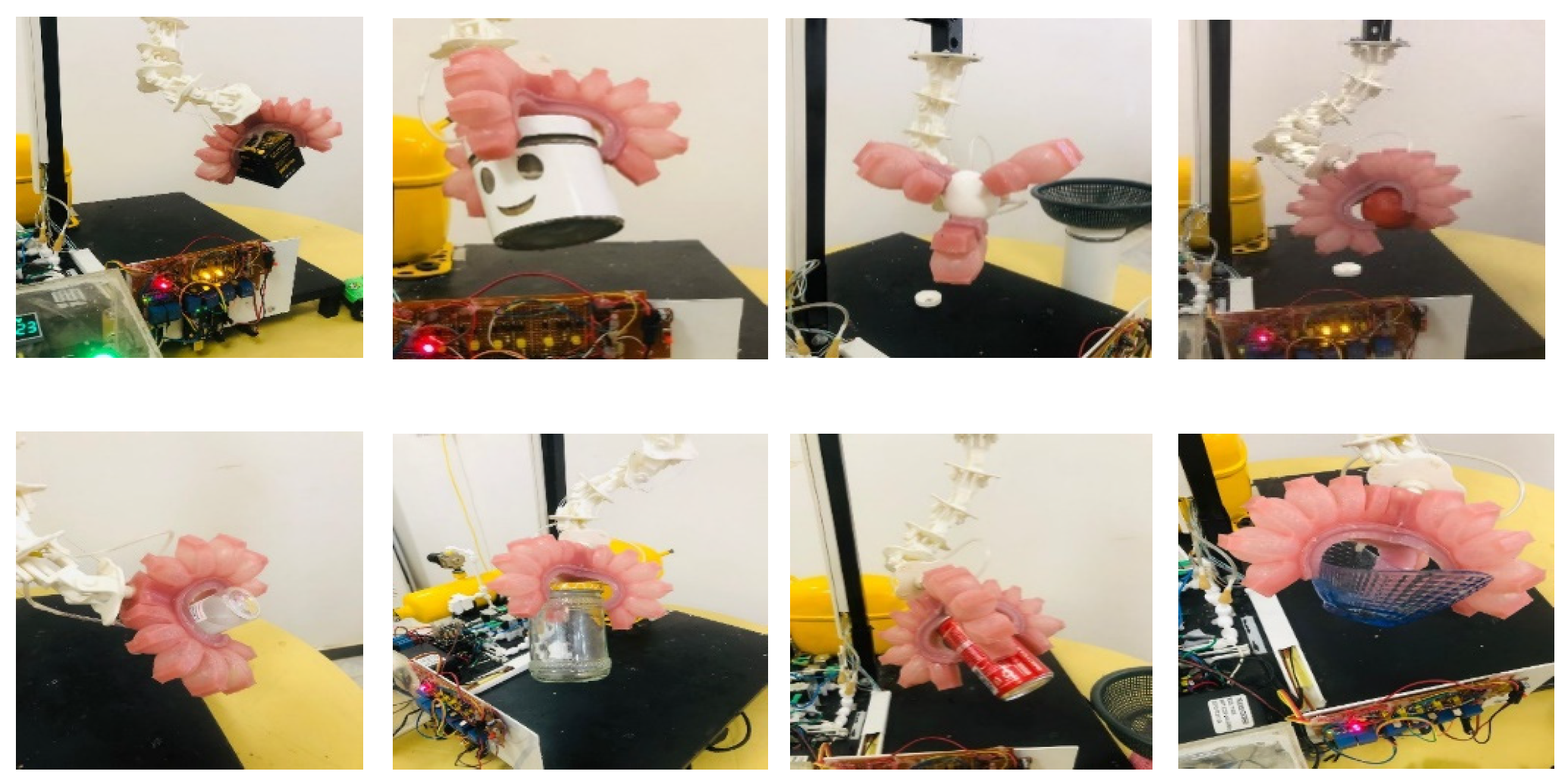
4.2.2. Grasping Performance
- Spherical objects:
- Ball (Ø 100 mm, 100 g): Successfully grasped and manipulated, validating the target task.
- Fragile objects:
- Chicken egg (60 g): Grasped and released without damage, showcasing the gripper’s delicacy;
- Tomato (100 g): Handled without bruising, demonstrating suitability for soft produce.
- Irregular shapes:
- Glass mug (150 g): Securely grasped despite non-uniform shape and fragility;
- Ceramic mug (slightly < 150 g): Easier to handle due to its more regular shape.
- Maximum payload test:
- Ceramic case (255 g): Heaviest item successfully manipulated;
- Total system capacity: 505 g (255 g payload + 250 g gripper mass).
- Shape variety:
- Additional tests with cylindrical and square objects (5–10 g) further validated the gripper’s morphological adaptability.
4.2.3. Discussion and Insights
- Adaptive grasping: The success with varied objects (spheres, cylinders, squares) validates our design goal of a universally adaptive gripper. The pneumatic actuation allows fingers to conform to object contours;
- Gentle manipulation: Handling eggs and tomatoes without damage is a significant achievement. It suggests that our system could be valuable in agricultural, food processing, or even healthcare applications where gentle touch is paramount;
- Payload capacity: A 505 g total capacity is impressive for a soft gripper. It suggests that our choice of Ecoflex 00-30 silicone and the internal channel design provide a good balance of compliance and strength;
- Control precision: Successfully placing objects (like the ball) at specific coordinates demonstrates the efficacy of our tendon-driven manipulator and intuitive joystick control;
- Human–robot interaction: Using visual (LEDs) and auditory (alarm) feedback during grasping makes the system more user-friendly, a crucial factor for collaborative robotics;
- Design validation: The gripper’s performance corroborates our earlier FEA simulations (Section 6.1). The ability to handle various objects without recalibration suggests that our models capture the essential behaviors of the soft materials;
- Future directions: While impressive, the current setup has room for improvement. Integrating force sensors could allow for even more delicate handling. Computer vision could enable automated object recognition and grasping strategy selection.
5. Simulation Results and Analysis
5.1. Soft Gripper Performance: Deflection and Grasping Force
5.1.1. Experimental Setup
5.1.2. FEA Simulation
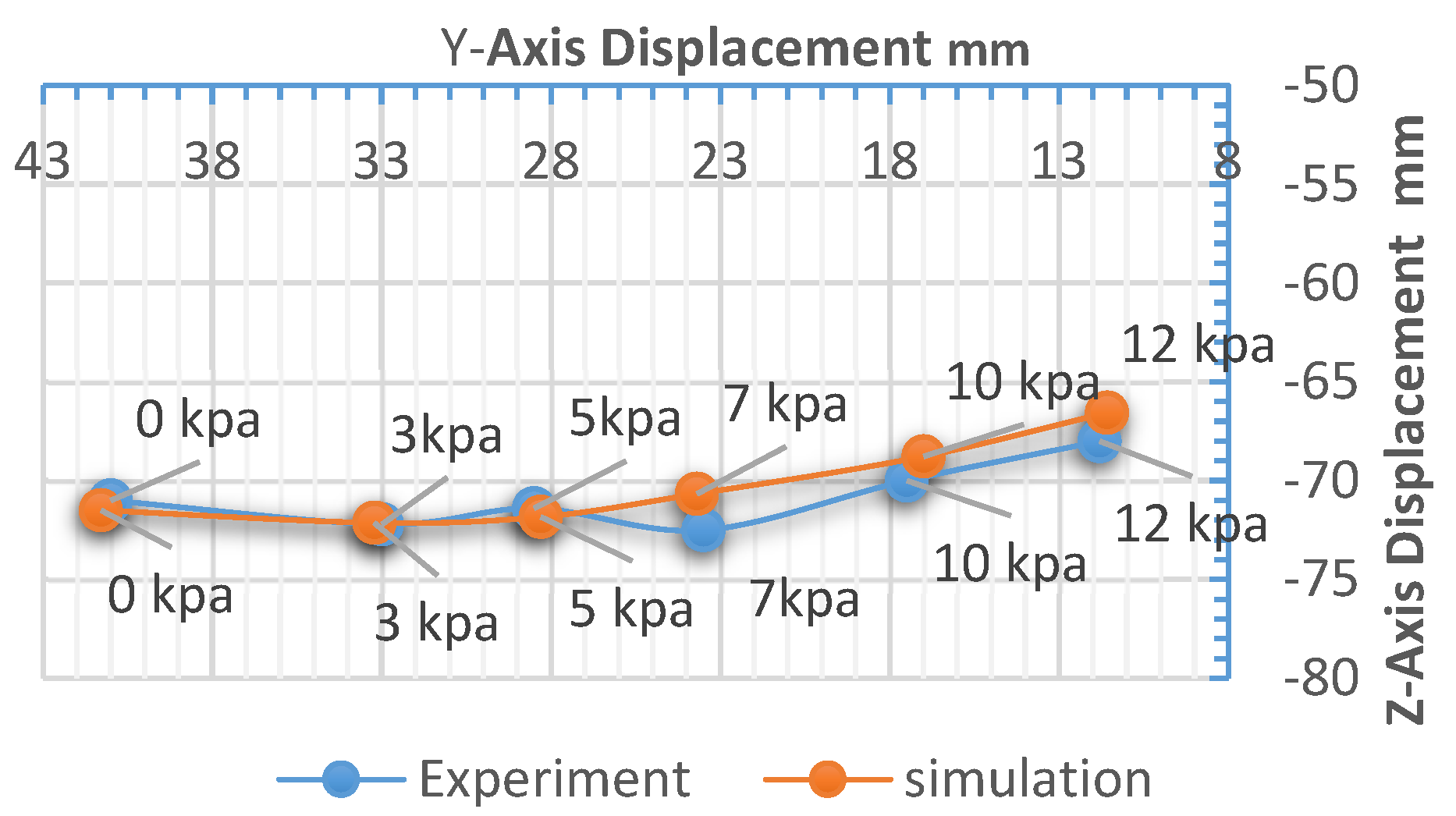
5.1.3. Deflection Results
- Non-linear deflection: Both curves show increasing deflection rates at higher pressures, which is characteristic of hyperelastic materials.
- Close agreement: The experimental and simulated results differ by only 2.5% in both Y (bending)- and Z (extension)-axes across all pressures.
- Bending dominance: The Y-axis deflection is significantly larger than the Z-axis, confirming our design intent for a curling, enveloping grasp.
5.1.4. Grasping Performance
- Fragile objects:
- Chicken egg (60 g): Grasped at 10 kPa without damage;
- Tomato (100 g): Held securely at 20 kPa without bruising.
- Irregular shapes:
- Glass mug (150 g): Stable grasp at 25 kPa;
- Ceramic mug (180 g): Held at 30 kPa.
- Maximum payload:
- Ceramic object: 255 g at 40 kPa;
- Total system capacity: 505 g (payload + 250 g gripper).
5.1.5. Gripper Versatility: Object Diversity
- Pressure sensitivity: From 2 kPa for paper to 15 kPa for metal, showcasing fine force control;
- Morphological adaptation: Conforms to shapes from spherical to cubic without reconfiguration;
- Material invariance: Effectively grasps porous (sponge), rigid (metal), and brittle (glass) materials;
- Size range: Handles objects from a few grams to over 300 g, indicating utility across various tasks.
5.1.6. Gripper Load Capacity
- Maximum load: The highest weight successfully lifted and manipulated by our gripper was a ceramic case weighing 255 g. This was achieved at a pneumatic pressure of 40 kPa;
- Total system capacity: Considering the weight of the gripper itself (250 g), the total system demonstrated a capacity of 505 g (255 g payload + 250 g gripper mass);
- Optimal load range: While the gripper successfully handled loads up to 255 g, we observed that the optimal performance, balancing grip security and object safety, was achieved in the range of 60–180 g. Within this range, the gripper demonstrated consistent performance across various object shapes and materials, requiring pressures between 10 and 30 kPa.
5.1.7. Error Analysis of Grasping Performance
5.2. Continuum Manipulator Performance
5.2.1. Workspace and Precision
- Reach: Maximum extension of 400 mm vertically (Z-axis) and 300 mm horizontally (X-axis).
- Bending angle: Up to 180° in any direction, allowing the gripper to face back toward the base.
- Placement precision: Within ±2 mm, tested by repeatedly placing the 100 g ball in the target basket at (200, 112, 245) mm.
5.2.2. Obstacle Avoidance
- Vertical pole: The manipulator curved around it without contact.
- Overhanging shelf: It dipped below and then up, showcasing actual 3D motion.
5.2.3. Continuum Manipulator Simulation by SolidWorks
- Each vertebra (V1 through V6) is modeled as a rigid body;
- Joints between vertebrae were modeled as spherical, allowing omnidirectional bending;
- Tendons were simulated as distance constraints, shortening to induce bending.
- Non-constant curvature: Unlike traditional models, our manipulator does not follow a constant curvature;
- Variable segment contribution: In the 45° bend, segments closer to the base (V2, V3) contribute more to the deflection, distributing strain;
- Workspace validation: Simulated positions align with our experimental reach, confirming the model’s accuracy.
5.3. Discussion
- Predictive design: The gripper’s FEA and the manipulator’s kinematic models closely match experimental results, enabling model-driven design iterations;
- Unmatched adaptability: The gripper handles objects varying in weight by 70×, in size from millimeters to centimeters, and in rigidity from paper to metal, all without hardware changes;
- Bioinspired dexterity: The manipulator’s non-constant curvature and omnidirectional bending replicate the complex motions of biological limbs, promising unmatched adaptability in unstructured environments;
- Safety and delicacy: Handling eggs and paper structures underscores the system’s suitability for environments where traditional robots are too risky, like assisted living or surgical settings;
- Scalability: With validated models for both the gripper and manipulator, scaling this system for different payloads or workspaces becomes primarily a computational task.
- Variable stiffness materials to increase payload without sacrificing gentleness;
- Closed-loop force control using embedded tactile sensors;
- Learning algorithms to automatically select grasping pressures based on object properties.
6. Conclusions and Future Research
- We delved into the design phase, using SolidWorks to craft every component, from the gripper’s pneumatic chambers to the manipulator’s vertebrae. This digital-first approach allowed for rapid iteration and optimization;
- In fabrication, we explored the capabilities of hyperelastic materials like Ecoflex 00-30 silicone. Through a combination of 3D-printed molds and careful casting techniques, we created soft pneumatic actuators that form the heart of our adaptive gripper;
- The integration of these soft components with more traditional elements—a tendon-driven continuum manipulator, stepper motors, and a structured control interface—marked a pivotal phase. This hybrid approach aimed to harness the strengths of both soft and rigid paradigms;
- Validation was crucial to our scientific approach. We employed finite element analysis (FEA) to predict the behavior of our soft components under varying pneumatic pressures. The strong correlation between these simulations and our physical experiments not only validated our models but also provided insights for future designs;
- Finally, we put our system to the test with a series of manipulation tasks. From the precise placement of objects to the gentle handling of fragile items like eggs and tomatoes, our experiments demonstrated the system’s versatility and finesse.
6.1. Conclusions: Soft Robotics for Adaptive and Gentle Manipulation
- Material selection for soft robotics: We demonstrated that highly elastic materials like Ecoflex 00-30 silicone can effectively create flexible, pneumatically actuated components. This material choice enables low-cost manufacturing of soft grippers capable of adapting to various object geometries;
- Gentle and versatile manipulation: Our gripper successfully manipulated various objects, from fragile items like eggs and tomatoes to irregularly shaped objects like mugs, without damage. This versatility stems from the gripper’s ability to conform to object contours, distributing forces evenly;
- Tunable grasping force: We found that grasping force depends on object material, weight, and rigidity. By controlling air pressure in the gripper’s chambers, we can modulate the grasping force, making our system adaptable to a wide range of objects. This tunability is a significant advantage over rigid grippers;
- Efficacy of multi-fingered design: The three-fingered design proved highly effective for grasping spherical, cylindrical, and asymmetric objects. This configuration provides robust, enveloping grasps, enhancing stability and adaptability;
- Tendon-driven continuum manipulation: Our tendon-driven approach to continuum manipulator control offers advantages in payload capacity and precision. We successfully manipulated objects up to 255 g (505 g, including gripper mass) with millimeter-level placement accuracy;
- Hyperredundant manipulation: The continuum manipulator, with its theoretically infinite degrees of freedom, demonstrated superior workspace coverage and obstacle avoidance compared to traditional rigid-link manipulators. This flexibility is crucial in cluttered or human-centric environments;
- Integrated design and validation: The close agreement between our FEA simulations and experimental results validates our modeling approach. This enables rapid design iterations and predictive performance analysis, accelerating the development cycle.
6.2. Future Research: Toward More Capable and Ubiquitous Soft Robots
- Enhanced payload capacity: By exploring stiffer silicone formulations (e.g., Ecoflex 00-50) and variable pneumatic pressures, we aim to increase the gripper’s payload beyond 2 kg. This would broaden the application domains to include heavier industrial or domestic objects;
- Modular continuum manipulator: Future designs could segment the manipulator into two or three independently controlled sections. This would enhance dexterity, allowing more complex maneuvers like reaching around obstacles or self-reconfiguration for compact storage;
- Hybrid soft–rigid design: Integrating rigid components (e.g., aluminum vertebrae or reinforced tendons) could improve load-bearing capacity and precision without sacrificing the benefits of a soft exterior. High-torque motors could further increase payload while maintaining smooth motion control;
- Advanced sensing and control: Incorporating distributed tactile sensors, force/torque sensors, and vision systems would enable the following:
- Closed-loop force control for more delicate manipulation;
- Visual serving for automated object recognition and grasping;
- Proprioceptive sensing to estimate manipulator shape for model-based control.
- Learning-based control: Employing machine learning algorithms (e.g., reinforcement learning) could allow the system to adapt to varying object properties and task constraints autonomously, reducing the need for manual tuning;
- Human–robot interaction (HRI): Expanding our intuitive joystick control to include haptic feedback or gesture recognition could make the system more accessible to non-expert users, which is crucial for assistive or collaborative applications;
- Durability and field testing: Long-term studies on material fatigue, especially in the pneumatic chambers and high-stress points identified by FEA, are needed. Additionally, field trials in targeted environments (e.g., agri-food processing, elderly care) would validate the system’s real-world efficacy;
- Toward soft robotic ecosystems: Integrating our soft manipulator with other soft systems (e.g., mobile bases, wearable interfaces) could lead to entirely new paradigms in robotics, where adaptability and safety are inherent at every level;
- Expanded sample sizes for all experiments to increase statistical power;
- Analysis of variance (ANOVA) to examine the effects of different factors (e.g., object properties, pressure) on grasping performance;
- Development of predictive models for grasping success based on object and gripper parameters;
- Rigorous uncertainty quantification for all measured and derived quantities.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Majidi, C. Soft Robotics: A Perspective—Current Trends and Prospects for the Future. Soft Robot. 2014, 1, 5–11. [Google Scholar] [CrossRef]
- Shintake, J.; Cacucciolo, V.; Floreano, D.; Shea, H. Soft Robotic Grippers. Adv. Mater. 2018, 30, 1707035. [Google Scholar] [CrossRef]
- Laschi, C.; Mazzolai, B.; Cianchetti, M. Soft Robotics: Technologies and Systems Pushing the Boundaries of Robot Abilities. Sci. Robot. 2016, 1, eaah3690. [Google Scholar] [CrossRef] [PubMed]
- Cianchetti, M.; Laschi, C.; Menciassi, A.; Dario, P. Biomedical Applications of Soft Robotics. Nat. Rev. Mater. 2018, 3, 143–153. [Google Scholar] [CrossRef]
- Rus, D.; Tolley, M.T. Design, Fabrication and Control of Soft Robots. Nature 2015, 521, 467–475. [Google Scholar] [CrossRef]
- Bao, G.; Fang, H.; Chen, L.; Wan, Y.; Xu, F.; Yang, Q.; Zhang, L. Soft Robotics: Academic Insights and Perspectives Through Bibliometric Analysis. Soft Robot. 2018, 5, 229–241. [Google Scholar] [CrossRef] [PubMed]
- Peng, Y.; Nabae, H.; Funabora, Y.; Suzumori, K. Controlling a Peristaltic Robot Inspired by Inchworms. Biomim. Intell. Robot. 2024, 4, 100146. [Google Scholar] [CrossRef]
- Peng, Y.; Nabae, H.; Funabora, Y.; Suzumori, K. Peristaltic Transporting Device Inspired by Large Intestine Structure. Sens. Actuators A Phys. 2024, 365, 114840. [Google Scholar] [CrossRef]
- Kim, S.; Laschi, C.; Trimmer, B. Soft Robotics: A Bioinspired Evolution in Robotics. Trends Biotechnol. 2013, 31, 287–294. [Google Scholar] [CrossRef]
- Della Santina, C.; Piazza, C.; Gasparri, G.M.; Bonilla, M.; Catalano, M.G.; Grioli, G.; Garabini, M.; Bicchi, A. The Quest for Natural Machine Motion: An Open Platform to Fast-Prototyping Articulated Soft Robots. IEEE Robot. Autom. Mag. 2017, 24, 48–56. [Google Scholar] [CrossRef]
- Bamdad, M.; Bahri, M.M. Kinematics and Manipulability Analysis of a Highly Articulated Soft Robotic Manipulator. Robotica 2019, 37, 868–882. [Google Scholar] [CrossRef]
- Dou, W.; Zhong, G.; Cao, J.; Shi, Z.; Peng, B.; Jiang, L. Soft Robotic Manipulators: Designs, Actuation, Stiffness Tuning, and Sensing. Adv. Mater. Technol. 2021, 6, 2100018. [Google Scholar] [CrossRef]
- Kapadia, A.D.; Walker, I.D.; Dawson, D.M.; Tatlicioglu, E. A Model-Based Sliding Mode Controller for Extensible Continuum Robots. In Proceedings of the 2019 American Control Conference (ACC), Philadelphia, PA, USA, 10–12 July 2019; pp. 1–3. [Google Scholar]
- Yirmibesoglu, O.D.; Morrow, J.; Walker, S.; Gosrich, W.; Canizares, R.; Kim, H.; Daalkhaijav, U.; Fleming, C.; Branyan, C.; Menguc, Y. Direct 3D Printing of Silicone Elastomer Soft Robots and Their Performance Comparison with Molded Counterparts. In Proceedings of the 2018 IEEE International Conference on Soft Robotics (RoboSoft), Livorno, Italy, 24–28 April 2018; pp. 295–302. [Google Scholar]
- Burgner-Kahrs, J.; Rucker, D.C.; Choset, H. Continuum Robots for Medical Applications: A Survey. IEEE Trans. Robot. 2015, 31, 1261–1280. [Google Scholar] [CrossRef]
- Zaidi, S.; Maselli, M.; Laschi, C.; Cianchetti, M. Actuation Technologies for Soft Robot Grippers and Manipulators: A Review. Curr. Robot. Rep. 2021, 2, 355–369. [Google Scholar] [CrossRef]
- Sun, J.; Chen, C.; Wang, L.; Liang, Y.; Chen, G.; Xu, M.; Xi, R.; Shao, H. Design and Simulation Experiment of Rigid-Flexible Soft Humanoid Finger. Machines 2022, 10, 448. [Google Scholar] [CrossRef]
- Shintake, J.; Sonar, H.; Piskarev, E.; Paik, J.; Floreano, D. Soft Pneumatic Gelatin Actuator for Edible Robotics. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 6221–6226. [Google Scholar]
- Galloway, K.C.; Becker, K.P.; Phillips, B.; Kirby, J.; Licht, S.; Tchernov, D.; Wood, R.J.; Gruber, D.F. Soft Robotic Grippers for Biological Sampling on Deep Reefs. Soft Robot. 2016, 3, 23–33. [Google Scholar] [CrossRef] [PubMed]
- Fatahillah, M.; Oh, N.; Rodrigue, H. A Novel Soft Bending Actuator Using Combined Positive and Negative Pressures. Front. Bioeng. Biotechnol. 2020, 8, 472. [Google Scholar] [CrossRef] [PubMed]
- Jiang, Y.; Chen, D.; Liu, P.; Jiao, X.; Ping, Z.; Xu, Z.; Li, J.; Xu, Y. Fishbone-Inspired Soft Robotic Glove for Hand Rehabilitation with Multi-Degrees-of-Freedom. In Proceedings of the 2018 IEEE International Conference on Soft Robotics (RoboSoft), Livorno, Italy, 24–28 April 2018; pp. 394–399. [Google Scholar]
- Mishra, A.K.; Del Dottore, E.; Sadeghi, A.; Mondini, A.; Mazzolai, B. SIMBA: Tendon-Driven Modular Continuum Arm with Soft Reconfigurable Gripper. Front. Robot. AI 2017, 4, 4. [Google Scholar] [CrossRef]
- Sawant, K.; Gkikakis, A.E.; Mattos, L.S. Investigating the Stiffness Characteristics of a Tendon-Driven Continuum Manipulator Using Sensitivity Analysis: A Case Study in Transoral Laser Microsurgery. Machines 2023, 11, 662. [Google Scholar] [CrossRef]
- Rateni, G.; Cianchetti, M.; Ciuti, G.; Menciassi, A.; Laschi, C. Design and Development of a Soft Robotic Gripper for Manipulation in Minimally Invasive Surgery: A Proof of Concept. Meccanica 2015, 50, 2855–2863. [Google Scholar] [CrossRef]
- Altuzarra, O.; Tagliavini, L.; Lei, Y.; Petuya, V.; Ruiz-Erezuma, J.L. On Constraints and Parasitic Motions of a Tripod Parallel Continuum Manipulator. Machines 2023, 11, 71. [Google Scholar] [CrossRef]
- Schaffner, M.; Faber, J.A.; Pianegonda, L.; Rühs, P.A.; Coulter, F.; Studart, A.R. 3D Printing of Robotic Soft Actuators with Programmable Bioinspired Architectures. Nat. Commun. 2018, 9, 878. [Google Scholar] [CrossRef] [PubMed]
- George Thuruthel, T.; Ansari, Y.; Falotico, E.; Laschi, C. Control Strategies for Soft Robotic Manipulators: A Survey. Soft Robot. 2018, 5, 149–163. [Google Scholar] [CrossRef] [PubMed]
- Felt, W.; Chin, K.Y.; Remy, C.D. Smart Braid Feedback for the Closed-Loop Control of Soft Robotic Systems. Soft Robot. 2017, 4, 261–273. [Google Scholar] [CrossRef] [PubMed]
- Webster, R.J.; Jones, B.A. Design and Kinematic Modeling of Constant Curvature Continuum Robots: A Review. Int. J. Rob. Res. 2010, 29, 1661–1683. [Google Scholar] [CrossRef]
- Jiang, H.; Wang, Z.; Liu, X.; Chen, X.; Jin, Y.; You, X.; Chen, X. A Two-Level Approach for Solving the Inverse Kinematics of an Extensible Soft Arm Considering Viscoelastic Behavior. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 6127–6133. [Google Scholar]
- Lipson, H. Challenges and Opportunities for Design, Simulation, and Fabrication of Soft Robots. Soft Robot. 2014, 1, 21–27. [Google Scholar] [CrossRef]
- Alici, G. An Effective Modelling Approach to Estimate Nonlinear Bending Behaviour of Cantilever Type Conducting Polymer Actuators. Sens. Actuators B Chem. 2009, 141, 284–292. [Google Scholar] [CrossRef]
- Li, H.; Xie, D.; Xie, Y. A Soft Pneumatic Gripper with Endoskeletons Resisting Out-of-Plane Bending. Actuators 2022, 11, 246. [Google Scholar] [CrossRef]
- Amouri, A.; Mahfoudi, C.; Zaatri, A. Dynamic Modeling of a Spatial Cable-Driven Continuum Robot Using Euler-Lagrange Method. Int. J. Eng. Technol. Innov. 2020, 10, 60–74. [Google Scholar] [CrossRef]
- Walker, I.D. Continuous Backbone “Continuum” Robot Manipulators. ISRN Robot. 2013, 2013, 726506. [Google Scholar] [CrossRef]
- Gariya, N.; Kumar, P.; Singh, T. Experimental Study on a Bending Type Soft Pneumatic Actuator for Minimizing the Ballooning Using Chamber-Reinforcement. Heliyon 2023, 9, e14898. [Google Scholar] [CrossRef] [PubMed]
- Fenjan, S.Q.; Dehkordi, S.F. Design and Fabrication of a Pneumatic Soft Robot Gripper Using Hyper-Flexible Silicone. In Proceedings of the 2023 11th RSI International Conference on Robotics and Mechatronics (ICRoM), Tehran, Iran, 19–21 December 2023; pp. 641–646. [Google Scholar]
- Lei, J.; Ge, Z.; Fan, P.; Zou, W.; Jiang, T.; Dong, L. Design and Manufacture of a Flexible Pneumatic Soft Gripper. Appl. Sci. 2022, 12, 6306. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Object | Shape | Weight (g) | Wall Thickness | Result |
|---|---|---|---|---|
| Ceramic | Cylindrical | 180 | Thick | ✓ |
| Glass | Cylindrical | 150 | Very thin | ✓ |
| Tomato | Spherical | 100 | Thin, soft | ✓ |
| Egg | Ovoid | 60 | Very thin | ✓ |
| Cube | Cubic | 50 | Moderate | ✓ |
| Can | Cylindrical | 255 | Thin, rigid | ✓ |
| Object | Pressure (Kpa) | Weight (g) | Reference [38] Object | Weight (g) | Result |
|---|---|---|---|---|---|
| Paper envelope | 5 | 30 | Mineral water bottle | - | ✓ |
| Egg | 10 | 60 | Egg | - | ✓ |
| Tomato | 20 | 100 | Orange | - | ✓ |
| Glass | 25 | 150 | Napkin paper | - | ✓ |
| Ceramic mug | 30 | 180 | Needle tube | - | ✓ |
| Ceramic case | 40 | 255 | A mug filled with water | 107 | ✓ |
| Object | Success Rate % | Mean Pressure (kPa) | Std Dev (kPa) |
|---|---|---|---|
| Ceramic | 95 | 30.2 | 1.8 |
| Glass | 90 | 25.3 | 2.1 |
| Tomato | 100 | 19.8 | 0.9 |
| Egg | 95 | 10.1 | 0.7 |
| Cube | 100 | 15.5 | 1.2 |
| Can | 85 | 39.7 | 2.5 |
| Vertebra | Rest Position | Bend (45° X-Axis) |
|---|---|---|
| V1 (base) | (0, 0, 0) | 0 |
| V2 | (0, 54.71, 18.27) | 30 |
| V3 | (0, 105.23, 31.81) | 60 |
| V4 | (0, 135.19, 81.89) | 100 |
| V5 | (0, 124.36, 140.3) | 130 |
| V6 (end) | (0, 64.9, 194.01) | 150 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qaddoori Fenjan, S.; Fathollahi Dehkordi, S. Soft Robotic System with Continuum Manipulator and Compliant Gripper: Design, Fabrication, and Implementation. Actuators 2024, 13, 298. https://doi.org/10.3390/act13080298
Qaddoori Fenjan S, Fathollahi Dehkordi S. Soft Robotic System with Continuum Manipulator and Compliant Gripper: Design, Fabrication, and Implementation. Actuators. 2024; 13(8):298. https://doi.org/10.3390/act13080298
Chicago/Turabian StyleQaddoori Fenjan, Shakir, and Siavash Fathollahi Dehkordi. 2024. "Soft Robotic System with Continuum Manipulator and Compliant Gripper: Design, Fabrication, and Implementation" Actuators 13, no. 8: 298. https://doi.org/10.3390/act13080298
APA StyleQaddoori Fenjan, S., & Fathollahi Dehkordi, S. (2024). Soft Robotic System with Continuum Manipulator and Compliant Gripper: Design, Fabrication, and Implementation. Actuators, 13(8), 298. https://doi.org/10.3390/act13080298