
Electromagnetic Torque Components Analysis of Ultra-High-Speed Permanent-Magnet Synchronous Motor for Fuel Cell Air Compressor

 , ,
, ,  ,
,  ,
,  , ,
, ,
Abstract
1. Introduction
- (1)
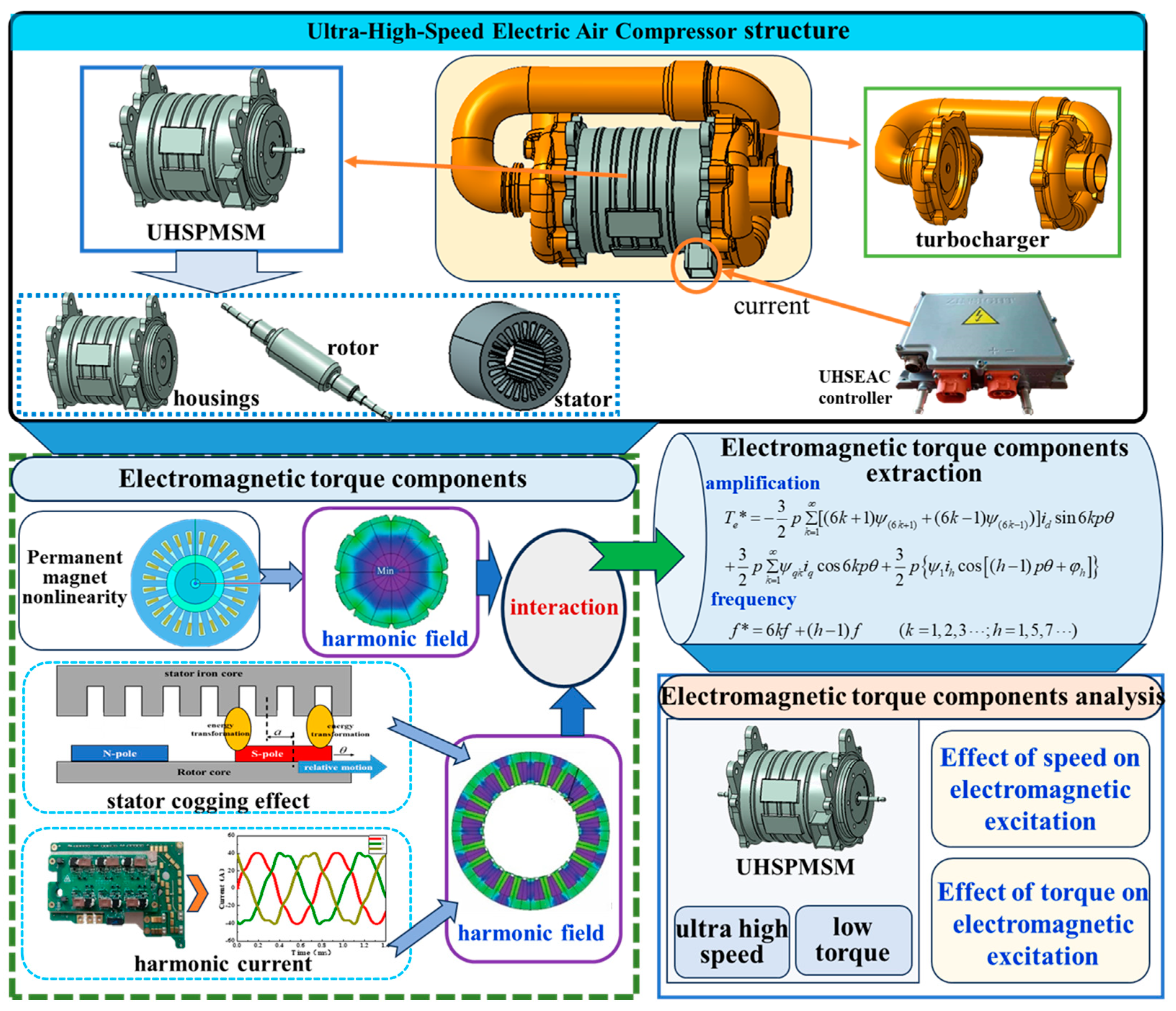
- The UHSPMSM electromagnetic torque components that combine the effects of permanent magnet field harmonics, stator slotting, and current harmonics are extracted.
- (2)
- The rules of electromagnetic torque components’ amplitude and frequency characteristics under different ultra-high-speed operating conditions are revealed.
2. Modeling and Experimental Verification of UHSPMSM
2.1. UHSEAC Structure
2.2. Electromagnetic Torque Modeling of UHSPMSM
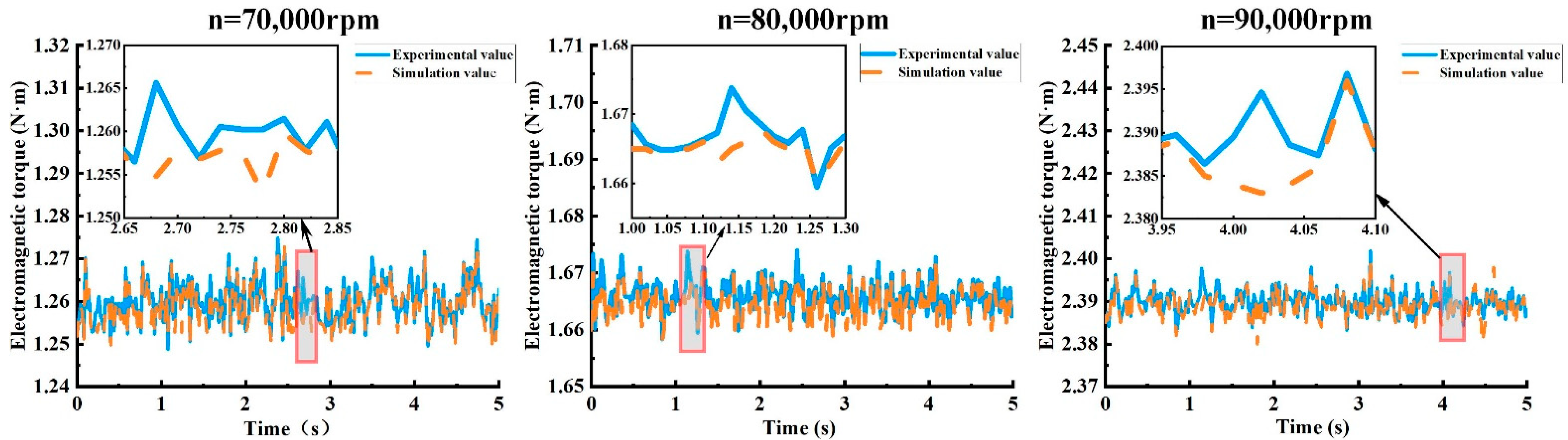
2.3. Model Experimental Verification
- (1)
- Experimental device
- (2)
- Experimental method
- (3)
- Experimental result
3. Extraction of Electromagnetic Torque Components for UHSPMSM
- (1)
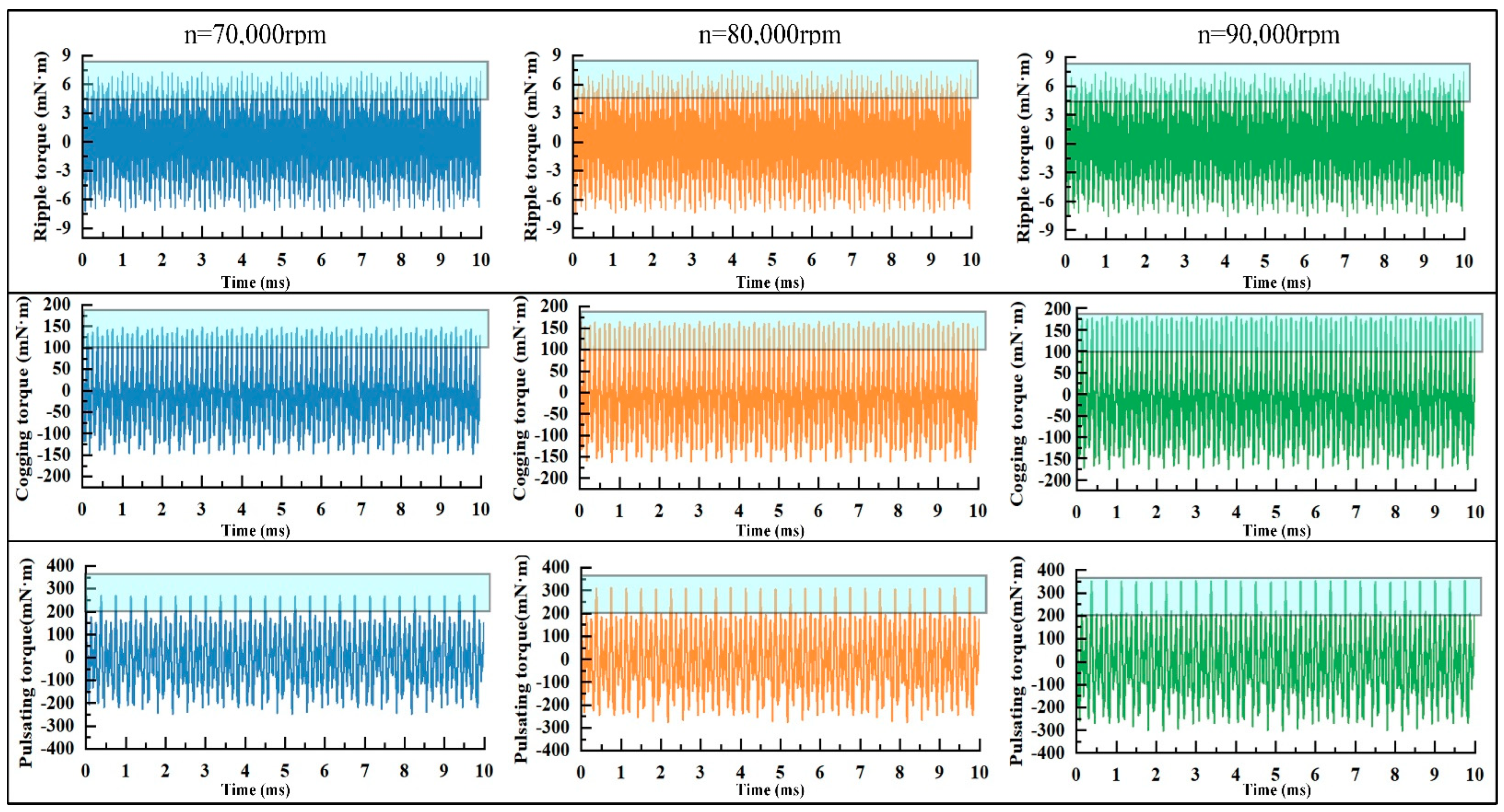
- Ripple torque
- (2)
- Cogging torque
- (3)
- Pulsating torque
- (4)
- Electromagnetic torque components
4. UHSPMSM Electromagnetic Torque Components’ Amplitude–Frequency Characteristics
4.1. Electromagnetic Torque Components’ Characteristics at Different Speeds
4.2. Electromagnetic Torque Components’ Characteristics under Different Torques
5. Conclusions
- (1)
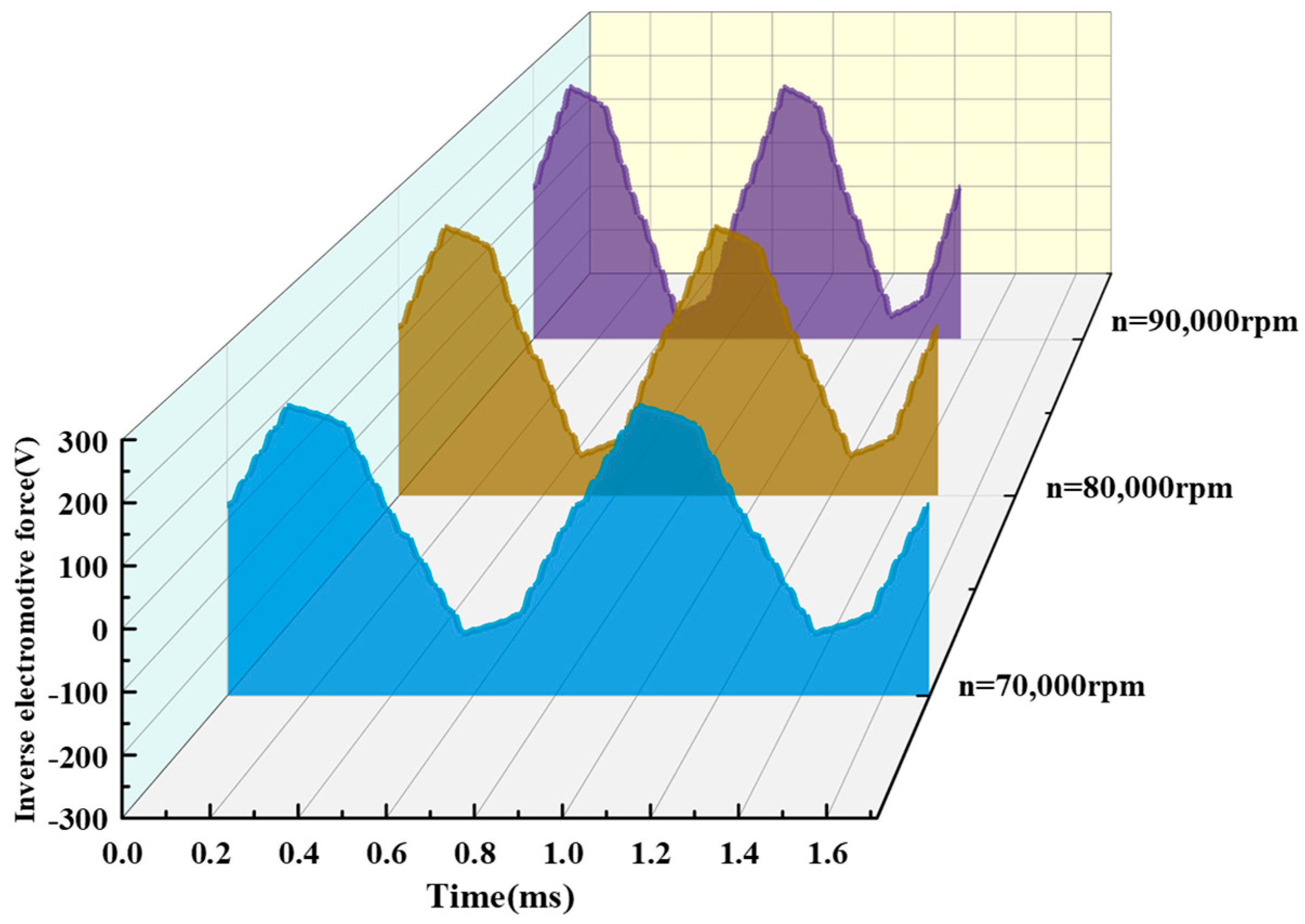
- At rated electromagnetic torque, the speed of the UHSPMSM increases, requiring an increase in the input current fundamental frequency. However, an increase in the current fundamental frequency increases the rate of change of the air gap magnetic field, leading to an increase in the electromagnetic excitation frequency. As the speed increases, the back-electromotive force increases. It is necessary to increase the input current amplitude to maintain it at the rated electromagnetic torque. This results in an increase in the amplitude of the electromagnetic excitation. When the speed increases from 70,000 rpm to 90,000 rpm, the 4th-order frequency of the electromagnetic excitation increases by 1333.33 Hz and the amplitude increases by 11.8 mN·m, and the 6th-order frequency increases by 2000 Hz and the amplitude increases by 22.8 mN·m.
- (2)
- At the rated speed, the electromagnetic torque of the UHSPMSM rises, requiring an increase in the input current amplitude. The increase in current amplitude increases the air gap magnetic field strength. This leads to a consequent increase in the electromagnetic excitation amplitude. The speed is constant, the input current fundamental frequency is constant, and the electromagnetic excitation frequency is constant. When the electromagnetic torque increases from 1.3 N·m to 1.7 N·m, the electromagnetic excitation 4th-order frequency remains unchanged at 5333.33 Hz and the amplitude increases by 22.2 mN·m, and the 6th-order frequency remains unchanged at 8000 Hz and the amplitude increases by 41.1 mN·m.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Anselma, P.; Belingardi, G. Fuel cell electrified propulsion systems for long-haul heavy-duty trucks: Present and future cost-oriented sizing. Appl. Energy 2022, 321, 119354. [Google Scholar] [CrossRef]
- Hu, D.; Hou, W.; Xiang, C.; Lu, D.; Yang, Q.; Li, J.; Wang, J. Waste heat utilization performance verification of Heat Exchanger Only Thermal Management System for fuel cell vehicle. J. Clean. Prod. 2023, 428, 139479. [Google Scholar] [CrossRef]
- Lu, D.; Yi, F.; Hu, D.; Li, J.; Yang, Q.; Wang, J. Online optimization of energy management strategy for FCV control parameters considering dual power source lifespan decay synergy. Appl. Energy 2023, 348, 121516. [Google Scholar] [CrossRef]
- Jia, C.; He, H.; Zhou, J.; Li, K.; Li, J.; Wei, Z. A performance degradation prediction model for PEMFC based on bi-directional long short-term memory and multi-head self-attention mechanism. Int. J. Hydrogen Energy 2024, 60, 133–146. [Google Scholar] [CrossRef]
- Hu, D.; Wang, Y.; Li, J.; Wang, J.; Yang, Q. Energy saving control of waste heat utilization subsystem for fuel cell vehicle. IEEE Transactions on Transportation Electrification. IEEE Trans. Transp. Electrif. 2023. [Google Scholar]
- Yi, F.; Su, Q.; Feng, C.; Wang, X.; Yang, L.; Zhou, J.; Fan, Z.; Jiang, S.; Zhang, Z.; Yu, T.; et al. Response analysis and stator optimization of ultra-high-speed PMSM for fuel cell electric air compressor. IEEE Trans. Transp. Electrif. 2022, 9, 5098–5110. [Google Scholar] [CrossRef]
- Li, Y.; Wang, X.; Chen, S.; Lu, H. Nonlinear dynamic response and global stability of an air compressor vibration system. J. Low Freq. Noise Vib. Act. Control 2019, 38, 1081–1095. [Google Scholar] [CrossRef]
- Su, Q.; Zhou, J.; Yi, F.; Hu, D.; Lu, D.; Wu, G.; Zhang, C.; Deng, B.; Cao, D. An intelligent control method for PEMFC air supply subsystem to optimize dynamic response performance. Fuel 2024, 361, 130697. [Google Scholar] [CrossRef]
- Kim, J.; Kim, D.; Jung, Y.; Lim, M. Design of ultra-high-speed motor for FCEV air compressor considering mechanical properties of rotor materials. IEEE Trans. Energy Convers. 2021, 36, 2850–2860. [Google Scholar] [CrossRef]
- Talj, R.; Hissel, D.; Ortega, R.; Becherif, M.; Hilairet, M. Experimental validation of a PEM fuel-cell reduced-order model and a moto-compressor higher order sliding-mode control. IEEE Trans. Ind. Electron. 2009, 57, 1906–1913. [Google Scholar] [CrossRef]
- Niedermayr, P.; Alberti, L.; Bolognani, S.; Abl, R. Implementation and experimental validation of ultrahigh-speed pmsm sensorless control by means of extended kalman filter. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 10, 3337–3344. [Google Scholar] [CrossRef]
- Moon, J.; Kang, D. Torque ripple and cogging torque reduction method of IPMSM using asymmetric shoe of stator and notch in stator. J. Electr. Eng. Technol. 2022, 17, 3465–3471. [Google Scholar] [CrossRef]
- Yamazake, K.; Utsunomiya, K.; Tanaka, A.; Nakada, T. Rotor surface optimization of interior permanent magnet synchronous motors to reduce both rotor core loss and torque ripples. IEEE Trans. Ind. Appl. 2022, 58, 4488–4497. [Google Scholar] [CrossRef]
- Zhu, Z.; Deng, J.; Ouyang, H.; Dou, X. Optimized Sampling Mechanism for Full-State Feedback Current Control of LCL-Equipped High-Speed PMSMs for Fuel Cell Air Compressor. IEEE Trans. Transp. Electrif. 2022, 9, 3386–3397. [Google Scholar] [CrossRef]
- Zhou, J.; Cheng, M.; Wen, H.; Yan, X.; Tong, M.; Wang, W. Modeling and suppression of torque ripple in PMSM based on the general airgap field modulation theory. IEEE Trans. Power Electron. 2022, 37, 12502–12512. [Google Scholar] [CrossRef]
- Girgin, M.; Guven, M.; Aydin, M. A new harmonic current injection technique to reduce cogging torque in axial flux permanent magnet motors. IEEE Trans. Magn. 2021, 58, 8201304. [Google Scholar] [CrossRef]
- Yamazaki, K.; Utsunomiya, K.; Ohiwa, H. Mechanism of torque ripple generation by time and space harmonic magnetic fields in permanent magnet synchronous motors. IEEE Trans. Ind. Electron. 2021, 69, 9884–9894. [Google Scholar] [CrossRef]
- Qu, J.; Zhang, C.; Jatskevich, J.; Zhang, S. Deadbeat harmonic current control of permanent magnet synchronous machine drives for torque ripple reduction. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 10, 3357–3370. [Google Scholar] [CrossRef]
- Hua, C.; Wang, Y.; Zhang, L.; Ding, W. Stability and stabilization for the coupling permanent magnet synchronous motors system with input delay. Nonlinear Dyn. 2022, 107, 3461–3471. [Google Scholar] [CrossRef]
- Liu, J.; Liang, Y.; Yang, P.; Wang, W.; Zhao, F.; Xu, K. Analysis on Circulating Current Loss in the Formed Winding of Permanent Magnet Synchronous Motors. IEEE Access 2021, 9, 113403–113414. [Google Scholar] [CrossRef]
- Liu, Y.; Huang, X.; Li, J.; Yu, W. Magnetic field analysis and thrust optimization of arc permanent magnet synchronous motor combined with linear mover and arc stator. IEEE Trans. Ind. Appl. 2023, 59, 5867–5874. [Google Scholar] [CrossRef]
- Xu, M.; Liu, G.; Chen, Q.; Ji, J.; Zhao, W. Design and optimization of a fault tolerant modular permanent magnet assisted synchronous reluctance motor with torque ripple minimization. IEEE Trans. Ind. Electron. 2020, 68, 8519–8530. [Google Scholar] [CrossRef]
- Peng, C.; Wang, D.; Wang, B.; Li, J.; Xu, C.; Wang, X. Torque ripple and electromagnetic vibration suppression in permanent magnet synchronous motor using segmented rotor with different pole widths. IEEE Trans. Magn. 2022, 58, 8206505. [Google Scholar] [CrossRef]
- Xu, X.; Zhang, B.; Wu, J. Research on synergistic reduction of cogging torque and ripple torque of interior permanent magnet synchronous motor based on magnetic field harmonic offset method. Electronics 2023, 12, 3499. [Google Scholar] [CrossRef]
- Caruso, M.; Di Tommaso, A.; Miceli, R.; Rosario, M.; Fabio, V. A cogging torque minimization procedure for interior permanent magnet synchronous motors based on a progressive modification of the rotor lamination geometry. Energies 2022, 15, 4956. [Google Scholar] [CrossRef]
- Knypiñski, Ł.; Nowak, L.; Demenko, A. Optimization of the synchronous motor with hybrid permanent magnet excitation system. COMPEL Int. J. Comput. Math. Electr. Electron. Eng. 2015, 34, 448–455. [Google Scholar] [CrossRef]
- Jędryczka, C.; Danielczyk, D.; Szeląg, W. Torque ripple minimization of the permanent magnet synchronous machine by modulation of the phase currents. Sensors 2020, 20, 2406. [Google Scholar] [CrossRef]
- Zhao, S.; Huang, X.; Fang, Y.; Zhang, H. DC-link-fluctuation-resistant predictive torque control for railway traction permanent magnet synchronous motor in the six-step operation. IEEE Trans. Power Electron. 2020, 35, 10982–10993. [Google Scholar] [CrossRef]
- Ma, C.; Shi, H.; Nie, P.; Wu, J. Finite-time stochastic stability analysis of permanent magnet synchronous motors with noise perturbation. Entropy 2022, 24, 791. [Google Scholar] [CrossRef]
- Zhao, J.; Liu, X.; Wang, S.; Zheng, L. Review of Design and Control Optimization of Axial Flux PMSM in Renewable-energy Applications. Chin. J. Mech. Eng. 2023, 36, 45. [Google Scholar] [CrossRef]
- Zhao, X.; Kou, B.; Huang, C.; Zhang, L. A Reverse-Salient Permanent Magnet Synchronous Motor for Electric Vehicles Considering Operating Conditions. IEEE Trans. Energy Convers. 2022, 38, 262–272. [Google Scholar] [CrossRef]
- Xu, W.; Xu, J.; Zhang, W.; Wang, J. A combined-pole permanent magnet synchronous motor incorporating nanocomposite magnets. J. Magn. Magn. Mater. 2023, 577, 170807. [Google Scholar] [CrossRef]
- Vo, A.T.; Fassenet, M.; Préault, V.; Espanet, C.; Kedous-Lebouc, A. New formulation of Loss-Surface Model for accurate iron loss modeling at extreme flux density and flux variation: Experimental analysis and test on a high-speed PMSM. J. Magn. Magn. Mater. 2022, 563, 169935. [Google Scholar] [CrossRef]
- Zhang, W.; Yang, Y.; Fan, M.; He, L.; Ji, A.; Xiao, Y.; Wen, H.; Zhang, X.; Yang, T.; Mekhilef, S.; et al. An Improved Model Predictive Torque Control for PMSM Drives Based on Discrete Space Vector Modulation. IEEE Trans. Power Electron. 2023, 38, 7535–7545. [Google Scholar] [CrossRef]
- Zhou, Y.; Wang, Y.; Li, H.; Mao, J. Optimal solution for model predictive current control of surface mounted permanent magnet synchronous motor based on trigonometrical substitution. IEEE Trans. Energy Convers. 2022, 37, 2338–2347. [Google Scholar] [CrossRef]
- Hu, D.; Hou, W.; Hu, L.; Yang, L.; Yang, Q.; Zhou, J. Optimal operation region of super-high-speed electrical air compressor in fuel cell system for working stability under multiple-time scale excitation. Int. J. Hydrogen Energy 2021, 46, 20054–20064. [Google Scholar] [CrossRef]
- Xia, K.; Dong, B.; Jing, L. Research on the Torque Ripple of Brushless DC Motor under Non-ideal EMF. J. Syst. Simul. 2019, 30, 197–204. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit |
|---|---|---|
| Rated power | 22 | kW |
| Rated voltage | 380 | V |
| Rated speed | 80,000 | rpm |
| Pole pairs | 1 | N/A |
| Number of slots | 24 | N/A |
| Stator inner diameter | 36.85 | mm |
| Stator outer diameter | 82 | mm |
| Stator length | 70 | mm |
| Stacking coefficient | 0.85 | N/A |
| Rotor inner diameter | 5.85 | mm |
| Rotor outer diameter | 35.85 | mm |
| Rotor shaft length | 70 | mm |
| Permanent magnet material | Arnold_Magnetics_N35EH_120C | N/A |
| Magnet thickness | 6 | mm |
| Magnet span | 60 | ° |
| Permanent magnet installation method | Surface mounted | N/A |
| Permanent magnet magnetizing direction | Radially magnetized | N/A |
| Permanent magnet material | NdFe35 | N/A |
| Parameter | Value | Unit |
|---|---|---|
| Permanent magnet chain, ψ | 58 | mWb |
| Stator phase winding resistance, R | 98 | mΩ |
| d and q axis inductances, Ld/Lq | 0.25 | mH |
| Pole pairs, p | 1 | N/A |
| Speed (rpm) | Frequency (Hz) | Ripple Torque (mN·m) | Cogging Torque (mN·m) | Pulsating Torque (mN·m) | Electromagnetic Torque Components (mN·m) |
|---|---|---|---|---|---|
| 70,000 | 4666.66 | 0 | 0 | 76.9 | 76.9 |
| 7000 | 2.1 | 84.9 | 54.8 | 141.8 | |
| 80,000 | 5333.33 | 0 | 0 | 83.6 | 83.6 |
| 8000 | 2.1 | 92.3 | 59 | 153.4 | |
| 90,000 | 5333.33 | 0 | 0 | 88.7 | 88.7 |
| 9000 | 2.2 | 98.1 | 64.4 | 164.6 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, J.; Zhang, J.; Yi, F.; Hu, D.; Zhang, C.; Li, Y.; Zhang, Z.; Wu, G.; Song, J. Electromagnetic Torque Components Analysis of Ultra-High-Speed Permanent-Magnet Synchronous Motor for Fuel Cell Air Compressor. Actuators 2024, 13, 184. https://doi.org/10.3390/act13050184
Zhou J, Zhang J, Yi F, Hu D, Zhang C, Li Y, Zhang Z, Wu G, Song J. Electromagnetic Torque Components Analysis of Ultra-High-Speed Permanent-Magnet Synchronous Motor for Fuel Cell Air Compressor. Actuators. 2024; 13(5):184. https://doi.org/10.3390/act13050184
Chicago/Turabian StyleZhou, Jiaming, Jinming Zhang, Fengyan Yi, Donghai Hu, Caizhi Zhang, Yanzhao Li, Zhiming Zhang, Guangping Wu, and Jinxiang Song. 2024. "Electromagnetic Torque Components Analysis of Ultra-High-Speed Permanent-Magnet Synchronous Motor for Fuel Cell Air Compressor" Actuators 13, no. 5: 184. https://doi.org/10.3390/act13050184
APA StyleZhou, J., Zhang, J., Yi, F., Hu, D., Zhang, C., Li, Y., Zhang, Z., Wu, G., & Song, J. (2024). Electromagnetic Torque Components Analysis of Ultra-High-Speed Permanent-Magnet Synchronous Motor for Fuel Cell Air Compressor. Actuators, 13(5), 184. https://doi.org/10.3390/act13050184