

Study of Self-Excited Thermomechanical Oscillator with Shape Memory Alloys



Abstract
1. Introduction
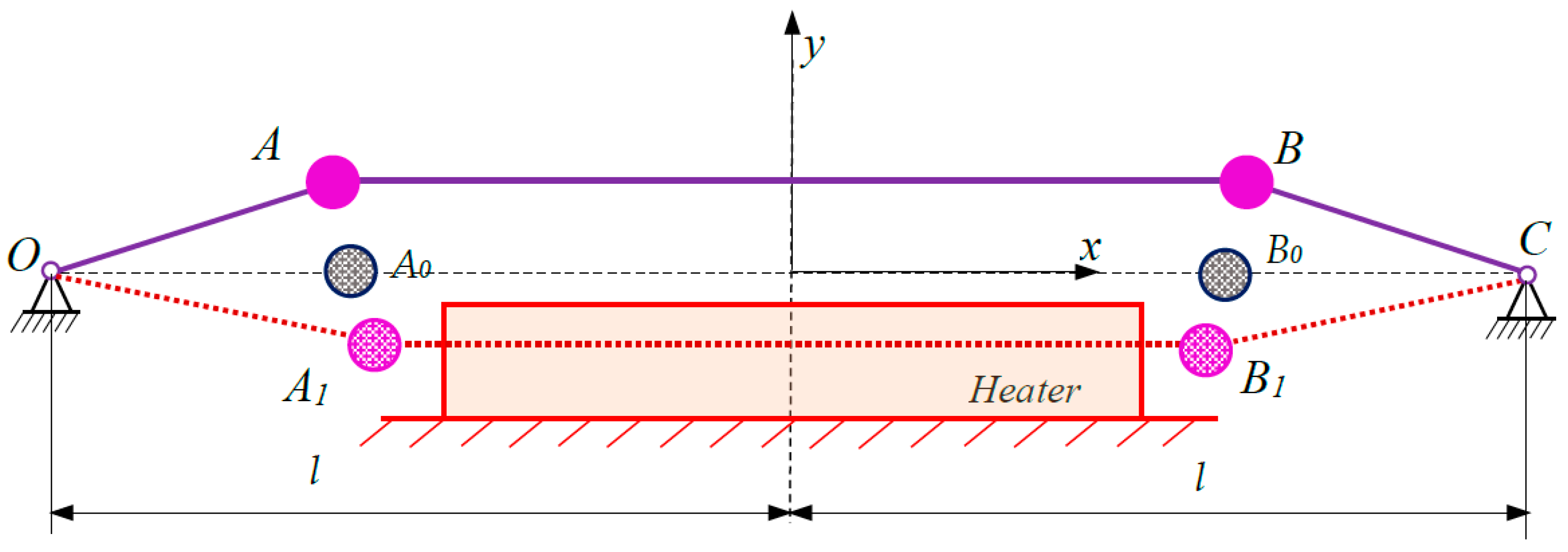
2. Design Concept of the Self-Excited Thermomechanical Oscillator
3. Building a Dynamic Model and Determining the Input Data for Its Solution
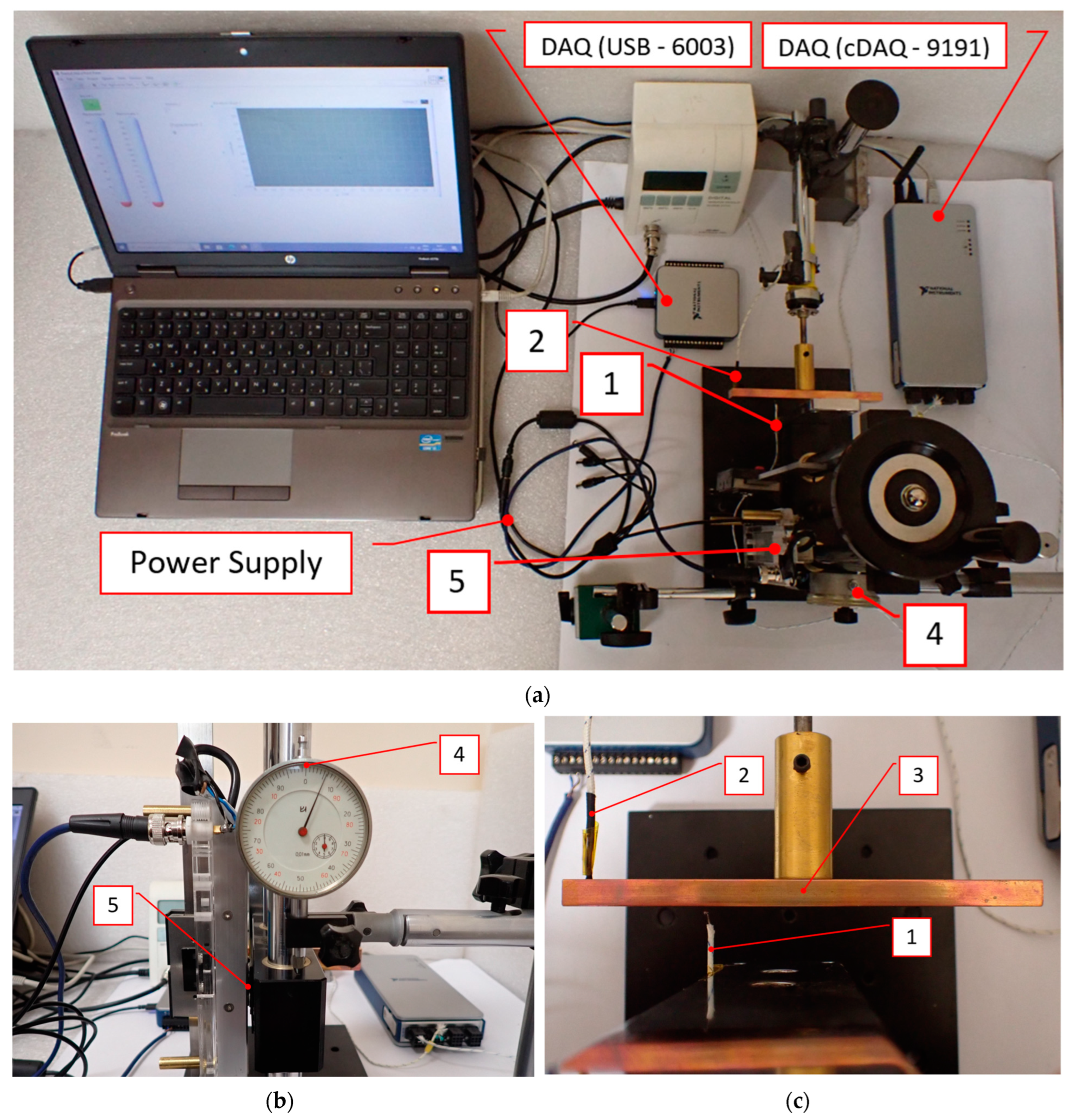
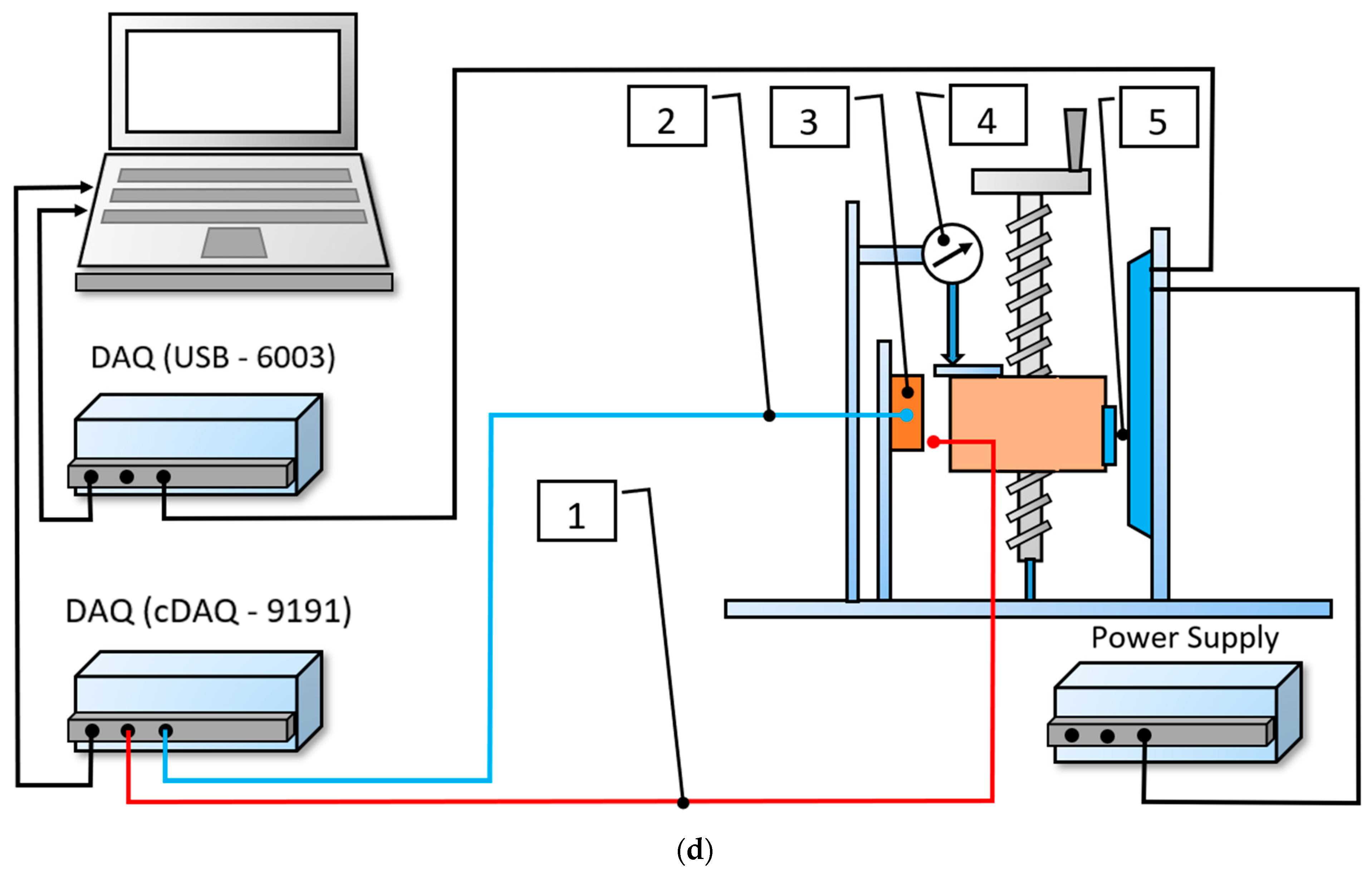
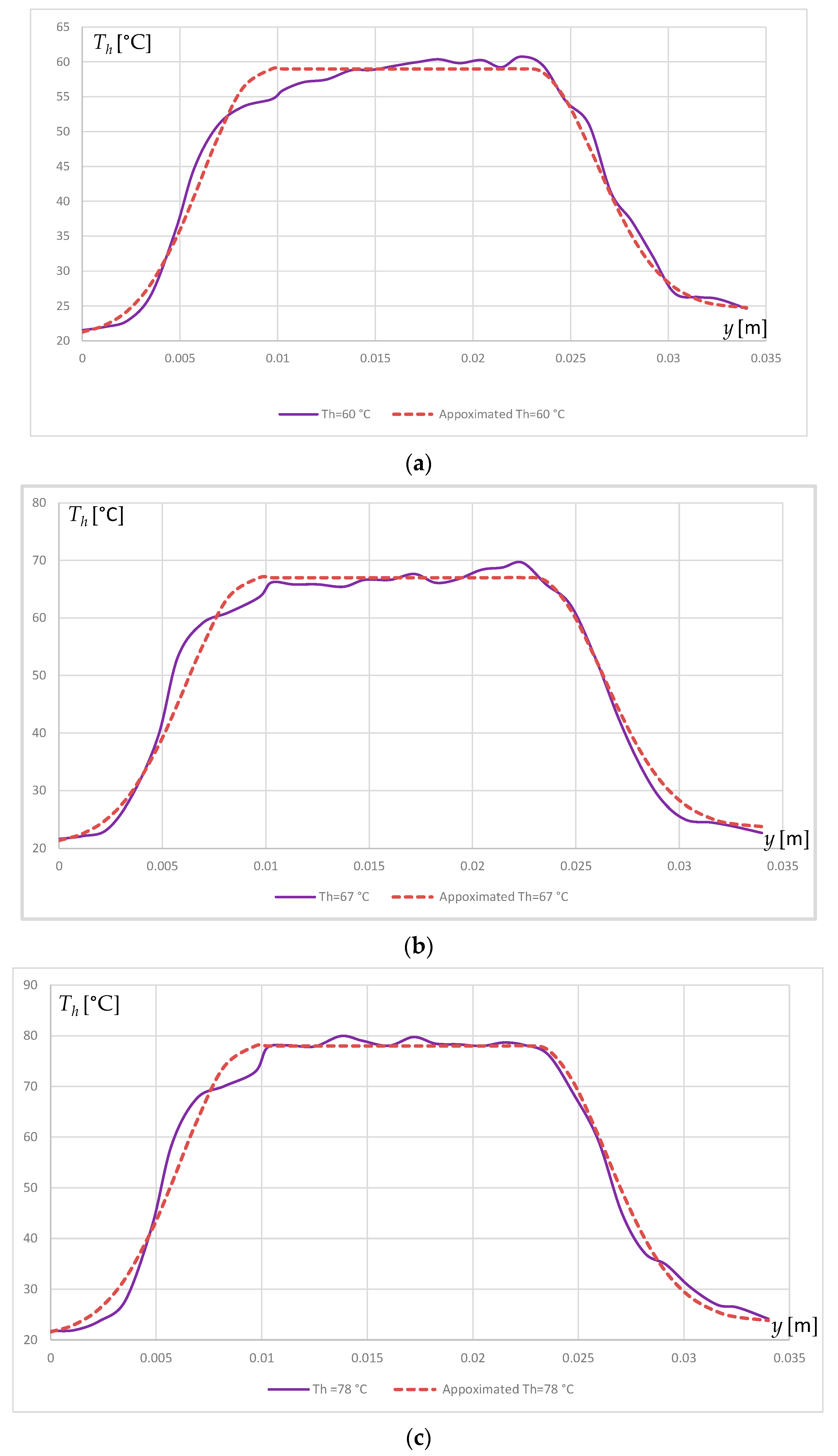
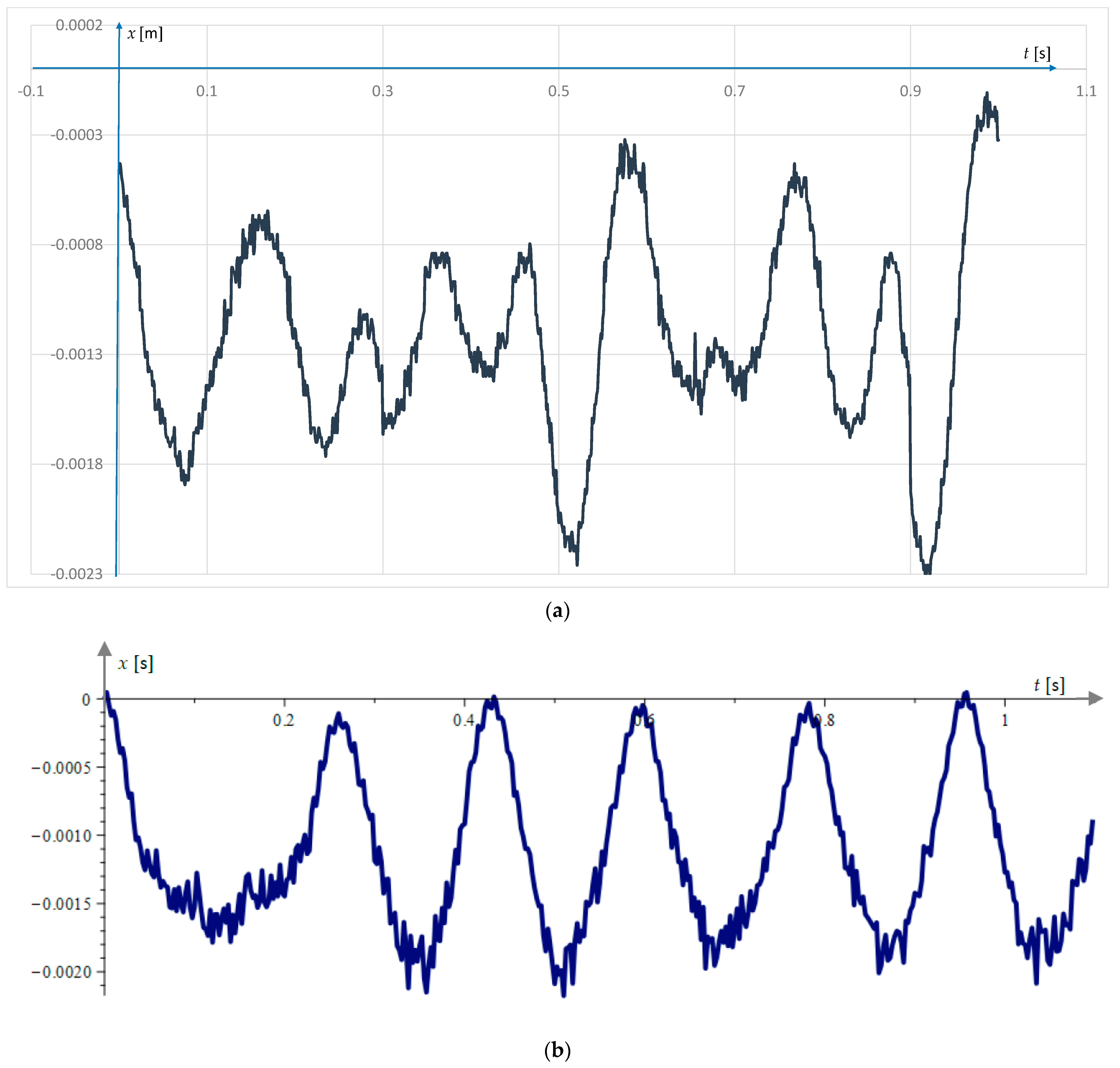
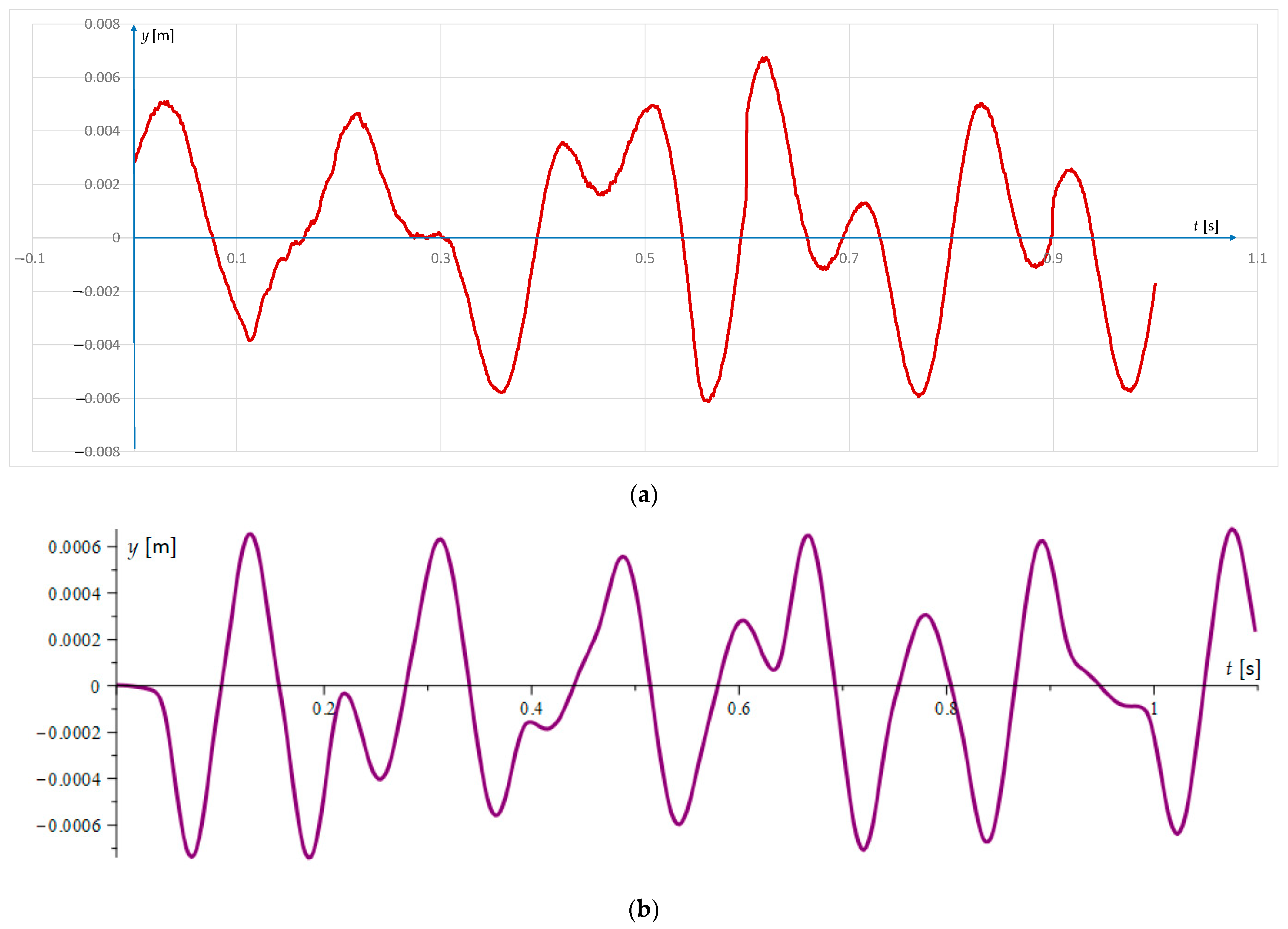
4. Conducting the Experiments and Comparing the Results
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Kroger, M.; Neubaer, M.; Popp, K. Experimental investigation on the avoidance of self-excited vibrations. Philos. Trans. R. Soc. A 2008, 366, 785–810. [Google Scholar] [CrossRef] [PubMed]
- Ding, W. Modeling and Control. In Self-Excited Vibration; Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar] [CrossRef]
- Papangelo, A.; Putignano, C.; Hoffmann, N. Self-excited vibrations due to viscoelastic interactions. Mech. Syst. Signal Process. 2020, 144, 106894. [Google Scholar] [CrossRef]
- Nesis, E.I.; Nesis, S.E. Thermomechanical and thermoacoustic self-excited oscillations. J. Eng. Phys. 1988, 55, 1178–1194. [Google Scholar] [CrossRef]
- Khvol’son, O.D. Physics Course; Nabu Press: Berlin, Germany, 1923; Volume 3. [Google Scholar]
- Awrejcewicz, J.; Pyryev, Y. Thermo-mechanical model of frictional self-excited vibrations. Int. J. Mech. Sci. 2005, 47, 1393–1408. [Google Scholar] [CrossRef]
- Astashev, V.K.; Korendyasev, G.K. Thermomechanical model of the occurrence of oscillations in metal cutting. J. Mach. Manuf. Reliab. 2012, 41, 189–193. [Google Scholar] [CrossRef]
- Fel’dshtein, V.A. Thermomechanical Self-Excited Oscillations of Current-Carrying Conductors. J. Appl. Mech. Tech. Phys. 2017, 58, 1091–1098. [Google Scholar] [CrossRef]
- Toda, A.; Tomita, C.; Hikosaka, M.; Hibno, Y.; Miyayji, H.; Nonomura, C.; Suzuki, T.; Ishihara, H. Thermo-mechanical coupling and self-excited oscillation in the neck propagation of PET films. Polymer 2002, 43, 947–951. [Google Scholar] [CrossRef]
- Weng, W.; Anstie, J.D.; Abbott, P.; Fan, B.; Stace, T.M.; Luiten, A.N. Stabilization of a dynamically unstable opto-thermo-mechanical oscillator. Phys. Rev. A 2015, 91, 063801. [Google Scholar] [CrossRef]
- Blocher, D.; Rand, R.H.; Zehnder, A.T. Analysis of laser power threshold for self oscillation in thermo-optically excited doubly supported MEMS beams. Int. J. Non Linear Mech. 2013, 57, 10–15. [Google Scholar] [CrossRef]
- Pandey, M.; Aubin, K.; Zalalutdinov, M.R.; Reichenbach, B.A.; Zehnder, T.; Richard, R.H.; Craighead, H.G. Analysis of Frequency Locking in Optically Driven MEMS Resonators. J. Microelectromech. Syst. 2006, 15, 1546–1554. [Google Scholar] [CrossRef]
- Pandey, M.; Rand, R.H.; Zehnder, A.T. Frequency Locking in a Forced Mathieu-van der Pol-Duffing System. Nonlinear Dyn. 2008, 54, 3–12. [Google Scholar] [CrossRef]
- Wei, L.; Kuai, X.; Bao, Y.; Wei, J.; Yang, L.; Song, P.; Zhang, M.; Yang, F.; Wang, X. The Recent Progress of MEMS/NEMS Resonators. Micromachines 2021, 12, 724. [Google Scholar] [CrossRef] [PubMed]
- Miller, J.M.L.; Shin, D.D.; Kwon, H.-K.; Shaw, W.S.; Kenny, T.W. Spectral narrowing of parametrically pumped thermomechanical noise. Appl. Phys. Lett. 2020, 117, 033504. [Google Scholar] [CrossRef]
- Chen, C.-Y.; Li, M.-H.; Li, S.-S. CMOS-MEMS Resonators and Oscillators: A Review. Sens. Mater. 2018, 30, 733–756. [Google Scholar] [CrossRef]
- Pillai, G.; Li, S.-S. Piezoelectric MEMS Resonators: A Review. IEEE Sens. J. 2021, 21, 12589–12605. [Google Scholar] [CrossRef]
- Mitrev, R.; Todorov, T.; Fursov, A.; Ganev, B. Theoretical and Experimental Study of a Thermo-Mechanical Model of a Shape Memory Alloy Actuator Considering Minor Hystereses. Crystals 2021, 11, cryst11091120. [Google Scholar] [CrossRef]
- Elahinia, M.H. Shape Memory Alloy Actuators: Design, Fabrication, and Experimental Evaluation; John Wiley & Sons, Ltd.: Toledo, Spain, 2016; p. 621. [Google Scholar] [CrossRef]
- Sohn, J.W.; Ruth, S.J.; Yuk, D.-G.; Choi, S.-B. Application of Shape Memory Alloy Actuators to Vibration and Motion Control of Structural Systems: A Review. Appl. Sci. 2023, 13, 995. [Google Scholar] [CrossRef]
- Todorov, T.; Mitrev, R.; Yatchev, I.; Fursov, A.; Ilin, A.; Fomichev, V. A Parametric Study of an Electrothermal Oscillator Based on Shape Memory Alloys. In Proceedings of the 21st International Symposium on Electrical Apparatus and Technologies (SIELA), Bourgas, Bulgaria, 3–6 June 2020; pp. 1–4. [Google Scholar] [CrossRef]
- Wang, L.; Melnik, R. Nonlinear dynamics of shape memory alloy oscillators in tuning structural vibration frequencies. Mechatronics 2012, 22, 1085–1096. [Google Scholar] [CrossRef]
- Mitrev, R.; Atamas, E.; Goncharov, O.; Todorov, T.; Iatcheva, I. Modeling and study of a novel electrothermal oscillator based on shape memory alloys. In Proceedings of the 9th International Scientific Conference “Techsys 2020”—Engineering, Technologies and Systems, Plovdiv, Bulgaria, 14–16 May 2020; Volume 878, p. 012059. [Google Scholar] [CrossRef]
- Rusinek, R.; Rekas, J. Modelling of shape memory alloy oscillator and its application to middle ear structural reconstruction. In Proceedings of the 22nd International Conference on Computer Methods in Mechanics, AIP Conference Proceedings, Lublin, Poland, 13–16 September 2018; Volume 1922, p. 100017. [Google Scholar] [CrossRef]
- Kumari, N.; Rakotondrabe, M. Design and Development of a Lead-Free-Piezoelectric Energy Harvester for Wideband, Low Frequency, and Low Amplitude Vibrations. Micromachines 2021, 12, 1537. [Google Scholar] [CrossRef]
- Yang, F.; Shi, Y.; Liu, J.; Wang, Z.; Tian, X. Design and Experimental Study of Shape Memory Alloy and Piezoelectric Composite Power Generation Device. Micromachines 2023, 14, 1434. [Google Scholar] [CrossRef]
- Wang, X.; Qin, Q.; Lu, Y.; Mi, Y.; Meng, J.; Zhao, Z.; Wu, H.; Cao, X.; Wang, N. Smart Triboelectric Nanogenerators Based on Stimulus-Response Materials: From Intelligent Applications to Self-Powered Systems. Nanomaterials 2023, 13, 1316. [Google Scholar] [CrossRef] [PubMed]
- Namli, O.; Taya, M. Design of piezo-SMA composite for thermal energy harvester under fluctuating temperature. J. Appl. Mech. 2011, 78, 031001. [Google Scholar] [CrossRef]
- Todorov, T.S.; Fursov, A.S.; Mitrev, R.P.; Fomichev, V.V.; Valtchev, S.S.; Il’in, A.V. Energy Harvesting with Thermally Induced Vibrations in Shape Memory Alloys by a Constant Temperature Heater. IEEE/ASME Trans. Mechatron. 2022, 27, 475–484. [Google Scholar] [CrossRef]
- Reddy, A.R.; Umapathy, M.; Ezhilaras, D.I.; Uma, G. Piezoelectric energy harvester with shape memory alloy actuator using solar energy. IEEE Trans. Sustain. Energy 2015, 6, 409–1415. [Google Scholar] [CrossRef]
- Mitrev, R.; Todorov, T.; Fursov, A.; Fomichev, V.; Il‘in, A. A Case Study of Combined Application of Smart Materials in a Thermal Energy Harvester with Vibrating Action. J. Appl. Comput. Mech. 2021, 7, 372–381. [Google Scholar] [CrossRef]
- Fursov, A.S.; Todorov, T.S.; Krylov, P.A.; Mitrev, R.P. On the Existence of Oscillatory Modes in a Nonlinear System with Hystereses. Differ. Equ. 2020, 56, 1081–1099. [Google Scholar] [CrossRef]
- Chattaraj, N. Experimental Investigation and Empirical Analysis of a Shape-Memory-Alloy-Actuated Electromechanical Oscillator. J. Vib. Eng. Technol. 2022, 10, 741–750. [Google Scholar] [CrossRef]
- Boschetto, A.; Bottini, L.; Costanza, G.; Tata, M.E. Shape Memory Activated Self-Deployable Solar Sails: Small-Scale Prototypes Manufacturing and Planarity Analysis by 3D Laser Scanner. Actuators 2019, 8, 38. [Google Scholar] [CrossRef]
- Mitrev, R.; Todorov, T. A Case Study of Experimental Evaluation of the Parameters of Sape Memory Alloy Wires. In Proceedings of the TechSys 2021—Engineering, Technologies and Systems, AIP Conference Proceedings, Plovdiv, Bulgaria, 27–29 May 2021; Volume 2449. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value | Unit |
|---|---|---|---|
| Half-support distance | l | 0.026 | m |
| NiTi filament half length | ls | 0.25 | m |
| Mass of a sphere | m | 0.012 | kg |
| Gravity acceleration | g | 9.81 | m/s2 |
| Lengths of NiTi filament end sections | 0.14 | m | |
| Length of the middle section of the NiTi filament | 0.24 | m | |
| Diameter of NiTi filament | ds | 0.00025 | m |
| Young’s modulus for NiTi in fully twinned martensite * | 21.7 | GPa | |
| Young’s modulus for NiTi in partially twinned martensite * | 0.56 | GPa | |
| Young’s modulus for NiTi in detwinned martensite * | 11.1 | Gpa | |
| Young’s modulus for NiTi in austenite * | 55.5 | Gpa | |
| Yield strain for twinned NiTi in martensite * | 0.0024 | ||
| Minimum strain of twinned NiTi in martensite * | 0.0044 | ||
| Starting austenite temperature of NiTi * | 55.99 | °C | |
| Final austenite temperature of NiTi * | 64.05 | °C | |
| Starting martensitic temperature of NiTi * | 25.4 | °C | |
| Final martensitic temperature of NiTi * | 21.44 | °C | |
| Austenite correction temperature | 0.01 | °C | |
| Austenite coefficient | 1.95 | ||
| Martensitic correction temperature | 0.01 | °C | |
| Martensitic coefficient | 2.17 | ||
| Start position of maximum temperature | 0.0095 | m | |
| End position of maximum temperature | 0.023 | m | |
| Room temperature | 20 | °C | |
| Maximum temperature of NiTi filament | 70 | °C | |
| Longitudinal damping coefficient | βx | 0.00042 | kg/s |
| Transverse damping coefficient | βy | 0.0014 | kg/s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yotov, I.; Todorov, G.; Todorov, T. Study of Self-Excited Thermomechanical Oscillator with Shape Memory Alloys. Actuators 2024, 13, 182. https://doi.org/10.3390/act13050182
Yotov I, Todorov G, Todorov T. Study of Self-Excited Thermomechanical Oscillator with Shape Memory Alloys. Actuators. 2024; 13(5):182. https://doi.org/10.3390/act13050182
Chicago/Turabian StyleYotov, Ivo, Georgi Todorov, and Todor Todorov. 2024. "Study of Self-Excited Thermomechanical Oscillator with Shape Memory Alloys" Actuators 13, no. 5: 182. https://doi.org/10.3390/act13050182
APA StyleYotov, I., Todorov, G., & Todorov, T. (2024). Study of Self-Excited Thermomechanical Oscillator with Shape Memory Alloys. Actuators, 13(5), 182. https://doi.org/10.3390/act13050182