1.1. Research Background
Bilateral control is a teleoperation method that simultaneously controls the position and force of both the master and follower and has been studied in the fields of surgical robotics [
1], space robotics [
2], and radioactive material manipulation [
3]. These control methods are based on the assumption that they can be applied to electric manipulators with high positioning rigidity and fast force response. On the other hand, pneumatic manipulators have a high affinity with humans and environments because of their softness caused by the compressibility of air, lightweight, high power, high shock and vibration resistance, electromagnetic noise-free, and ability to estimate external force without a force sensor. Taking advantage of these characteristics, pneumatic manipulators have been applied to surgical assist robots [
4,
5], humanoid robots [
6], rehabilitation robots [
7,
8], construction machinery operating robots [
9] and so on. For these systems, accurate and stable bilateral control is also desired for remote work and teaching operations. However, most existing bilateral control methods are systems that assume high rigidity and fast response from the follower robot. If these are applied to a low-rigidity servo device such as a pneumatic manipulator, the positional deviation between the master and follower may reduce operability, and the system may become unstable due to a delayed response. Furthermore, in environments where the robot cannot be equipped with a force sensor, the above problems are more likely to occur as uncertain values of external force estimation are fed back to the master. Therefore, it is necessary to develop a practical, highly rigid, and highly stable bilateral control method suitable for such a compliant device with low rigidity and low response.
1.2. Related Works
Bilateral control begins with basic control methods such as symmetrical bilateral control and force-reflecting bilateral control (Force-Reflecting Type), and many methods have been developed to reproduce delicate tactile sensations and obtain high stability. Miyazaki et al. [
10] proposed a parallel bilateral control with a small phase delay and high stability by giving equal position commands to the master and follower. Tachi et al. [
11,
12,
13] proposed an impedance-controlled bilateral control that can determine the virtual mass and viscosity of the master and follower to arbitrary values. In particular, Lawrence [
14] defined “transparency” as a quantitative index of force sensation reproduction in bilateral control, and Yokokoji et al. [
15,
16,
17] proposed a 4-channel bilateral control that achieves ideal transparency. In recent years, Michel et al. [
18] presented an adaptive impedance control architecture for robotic teleoperation of contact tasks using the ’Learning from Demonstration’ framework. However, these control methods assume a system with high control rigidity, so they are not suitable for flexible pneumatically driven systems. In addition, a force sensor is required to measure external force, which is difficult to use in harsh operating environments where sensors cannot be installed on the device. The latest research trend includes an identification-free, data-driven
control method proposed by Kucukdemiral et al. [
19] under physical limitations and norm-bounded disturbances. Data-driven control has been successful in many applications, but it can be difficult to generalize in terms of data quality and reliability. A model-based approach is still useful for addressing specific constraints and requirements.
On the other hand, there are studies such as Iida et al. [
20,
21,
22] that have applied an observer-based acceleration control theory [
23] to bilateral control and achieved high transparency without using force sensors. This method uses a disturbance observer (DOB) and a reaction force observer (RFOB) to achieve high-speed force control without a force sensor. Advancing this technique, Kimura et al. [
24] proposed a novel admittance-based bilateral control system using only two communication channels without deteriorating the control performance, which results in communication data reduction. However, this acceleration-based bilateral control requires the actuator to have quick responsiveness to perform acceleration control well and is not suitable for pneumatic actuators that have a significant response delay in driving force.
When it comes to pneumatically driven systems, even in recent years, a great deal of research has been conducted to improve position controllability [
25,
26,
27]. In these studies, the position control bandwidth was quite low, making it inherently difficult to achieve high stiffness and stability. On the other hand, many studies on sensor-less external force estimation take advantage of the high back-drivability of pneumatic actuators [
28,
29]. Although these studies have pursued more rigorous dynamic models that include nonlinearities, they still leave non-negligible levels of estimation error. Related works on bilateral control systems for pneumatic manipulators include a control method using a passive controller for a force amplification system developed by Durbra et al. [
30], and a sliding mode control method for controlling pneumatic pressures using an inexpensive solenoid valve proposed by Moreau et al. [
31]. In addition, Shono et al. [
32] designed and implemented an encrypted controller for a force feedback-type bilateral control system using pneumatic cylinders. However, these methods have not solved the aforementioned problems of pneumatic servo drive such as low response and low rigidity. Tadano et al. [
33,
34] developed pneumatically driven robotic surgical instruments capable of external force estimation without using force sensors and constructed the Force-Reflecting Type bilateral control system. However, there remained problems, such as large position deviation between the master and follower due to low control rigidity on the follower side, and errors in external force estimation due to modeling errors, resulting in system instability and an unnatural operational feel.
In contrast to the existing studies mentioned above, Kaneko et al. [
35] have proposed a robust control method that does not require high-precision specifications for bilateral control systems. Kanaoka et al. [
36,
37] named this method “force-projecting bilateral control” and proposed a design method that can be practically applied. The force-projecting bilateral control (Force-Projecting Type) directly projects operating forces on the master side to the driving force on the follower side and was applied to the control of force-amplifying manipulators [
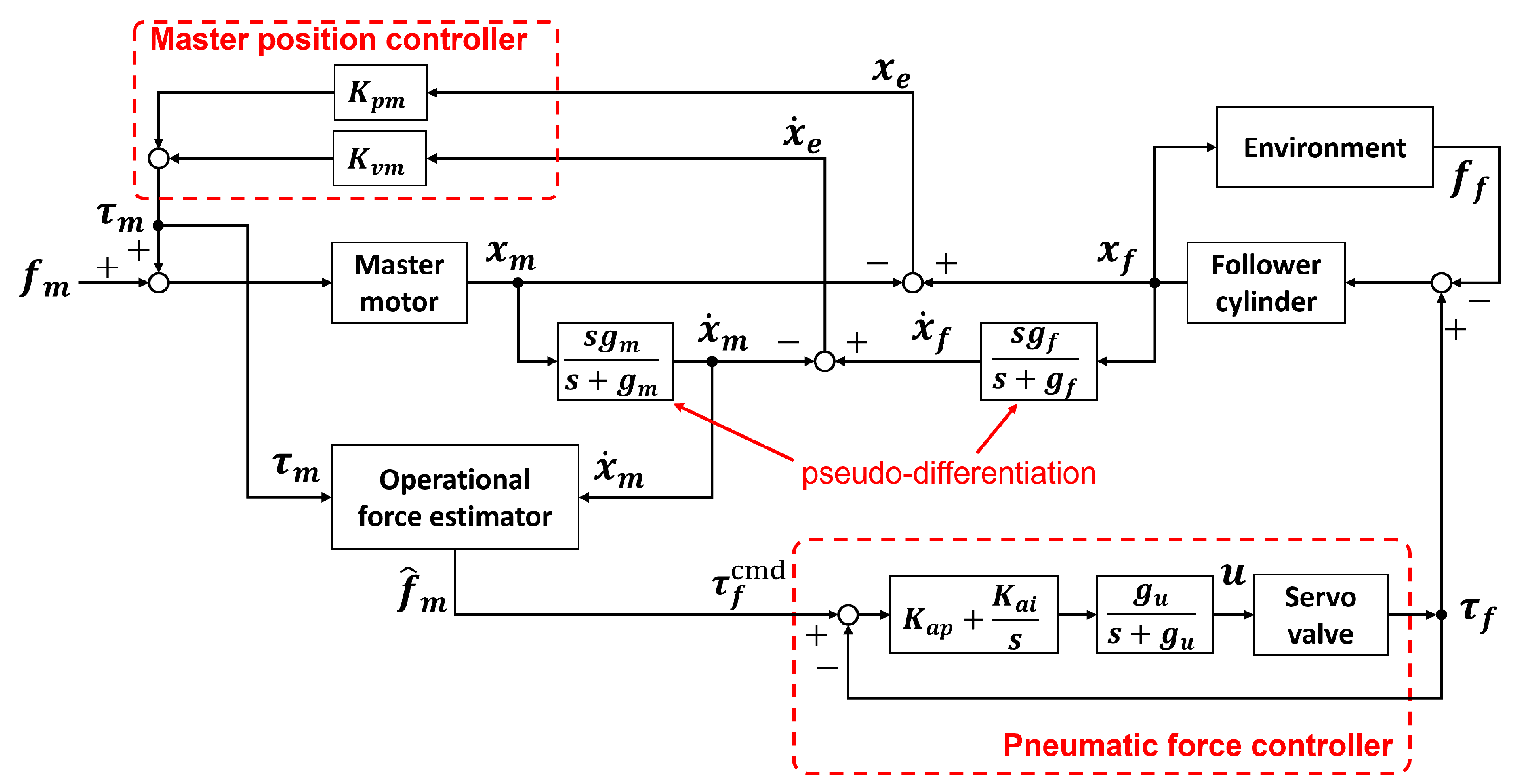
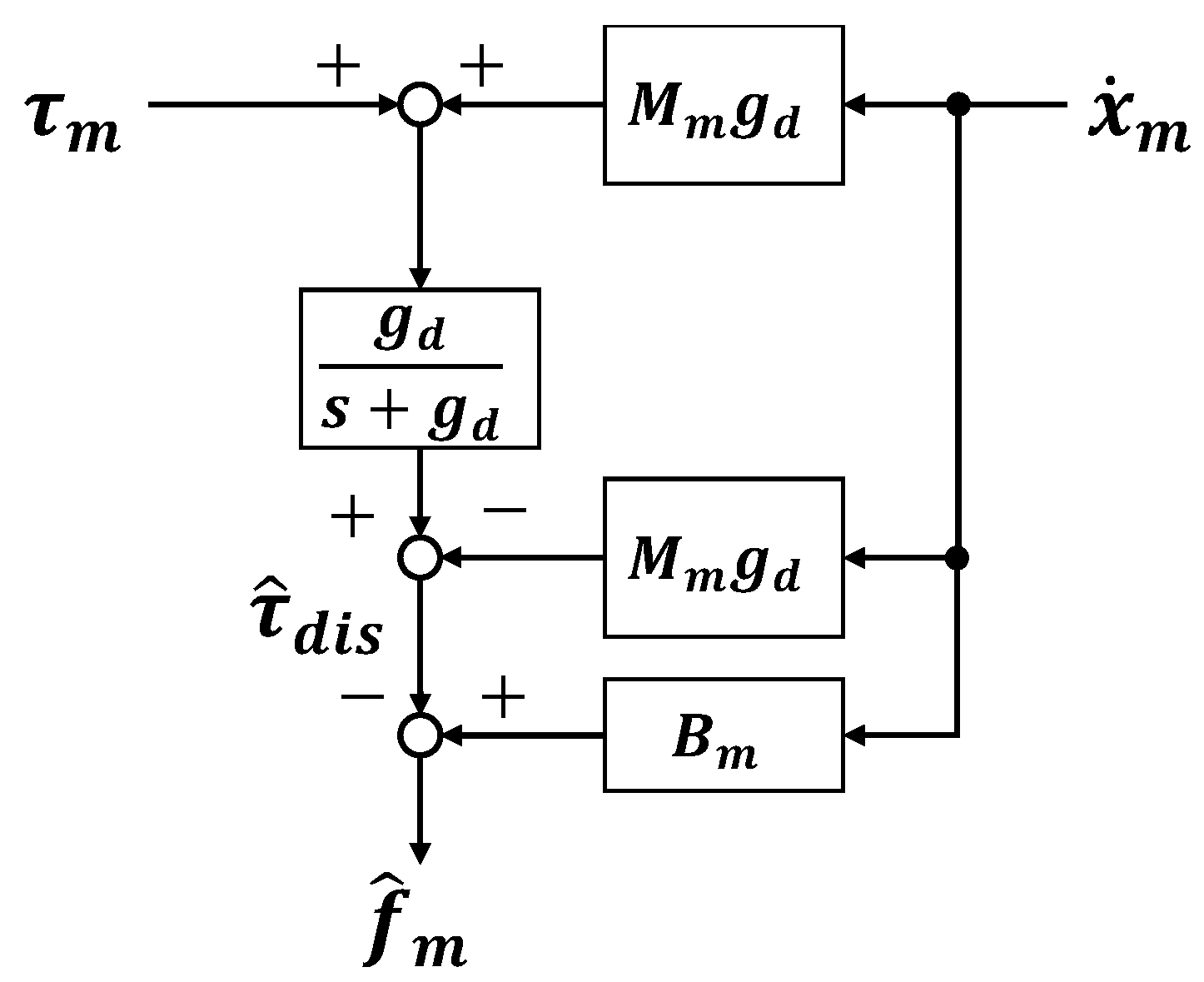
38] that require high rigidity and large output. This control method does not require position control on the follower side; thus, the system performance does not depend on the control stiffness of the follower device. Another important point is that there is no need for external force feedback from the follower to the master, so there is no need for force sensors or external force estimation.
1.3. Research Objective
Therefore, in this study, we focus on the advantages of the force-projecting bilateral control mentioned above and aim to solve the problems of positional deviation and system instability caused by the low rigidity and slow response characteristics of a pneumatically driven follower device.
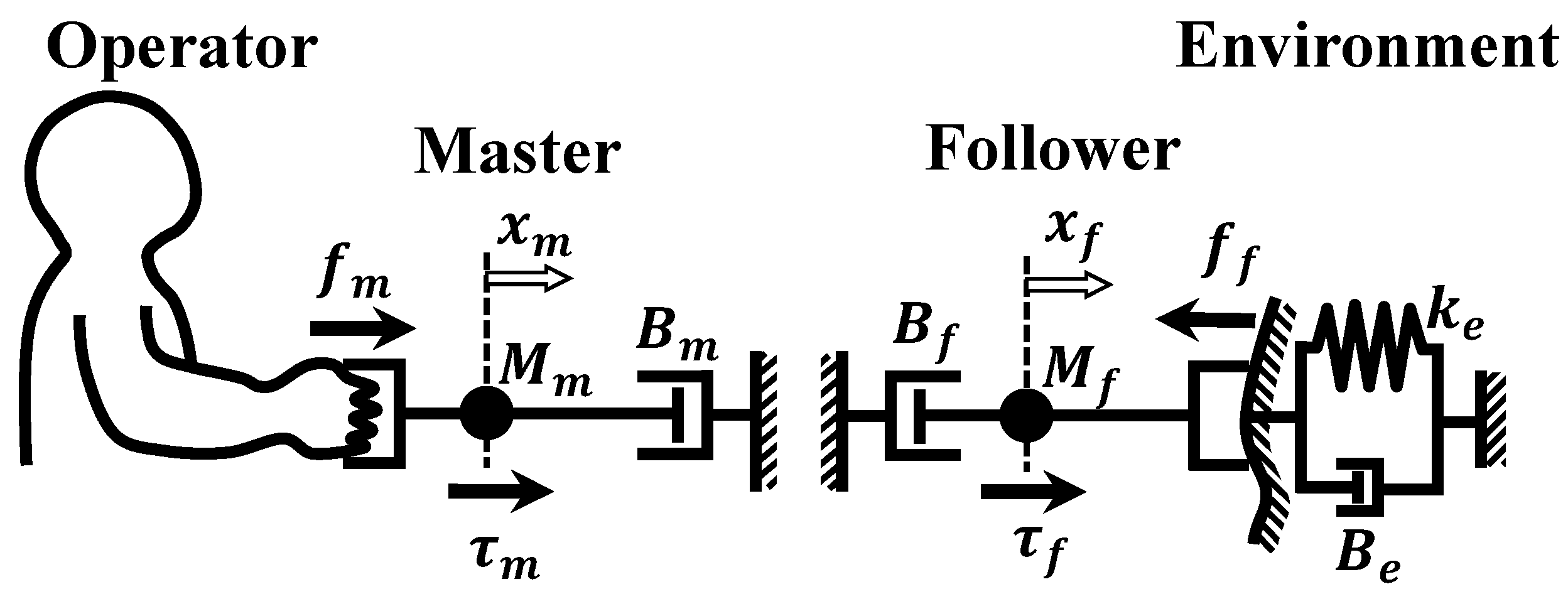
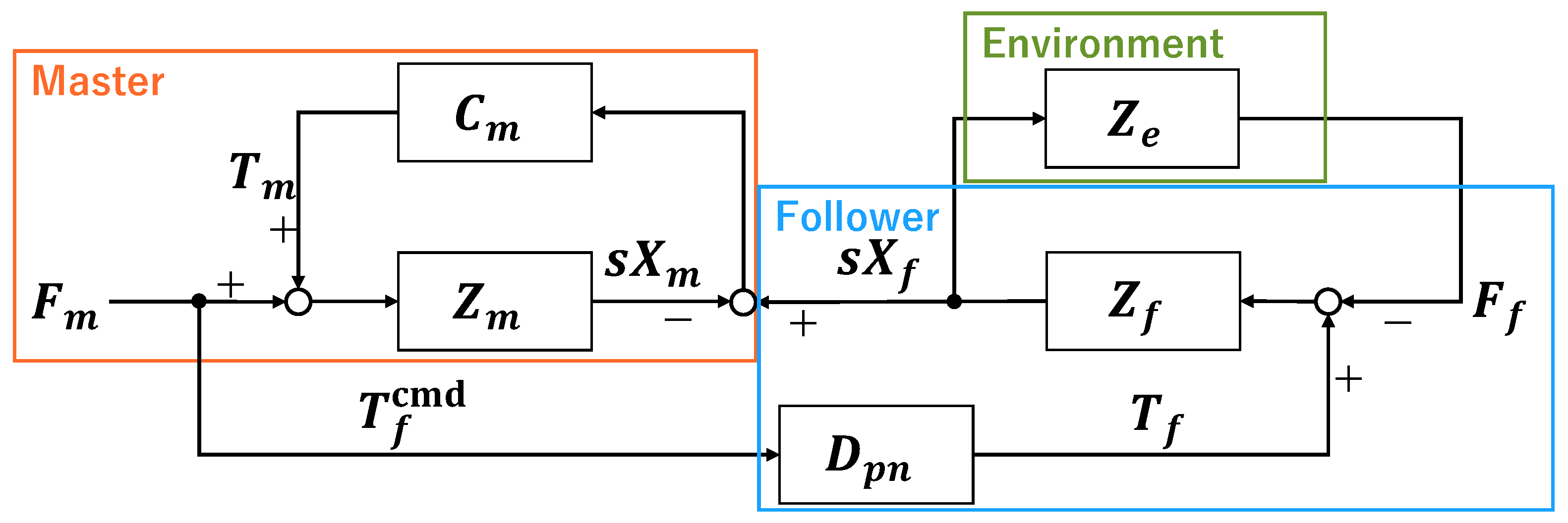
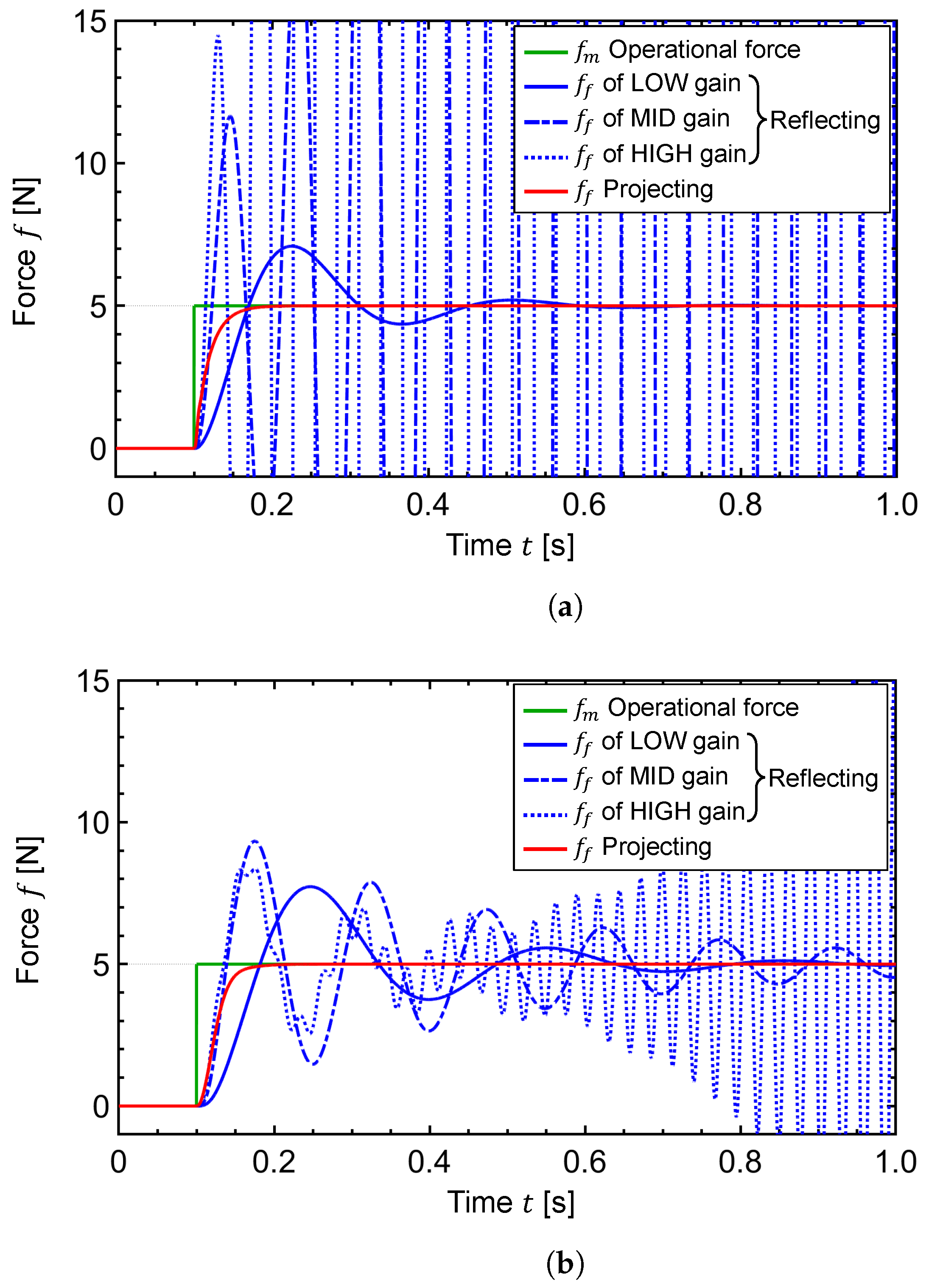
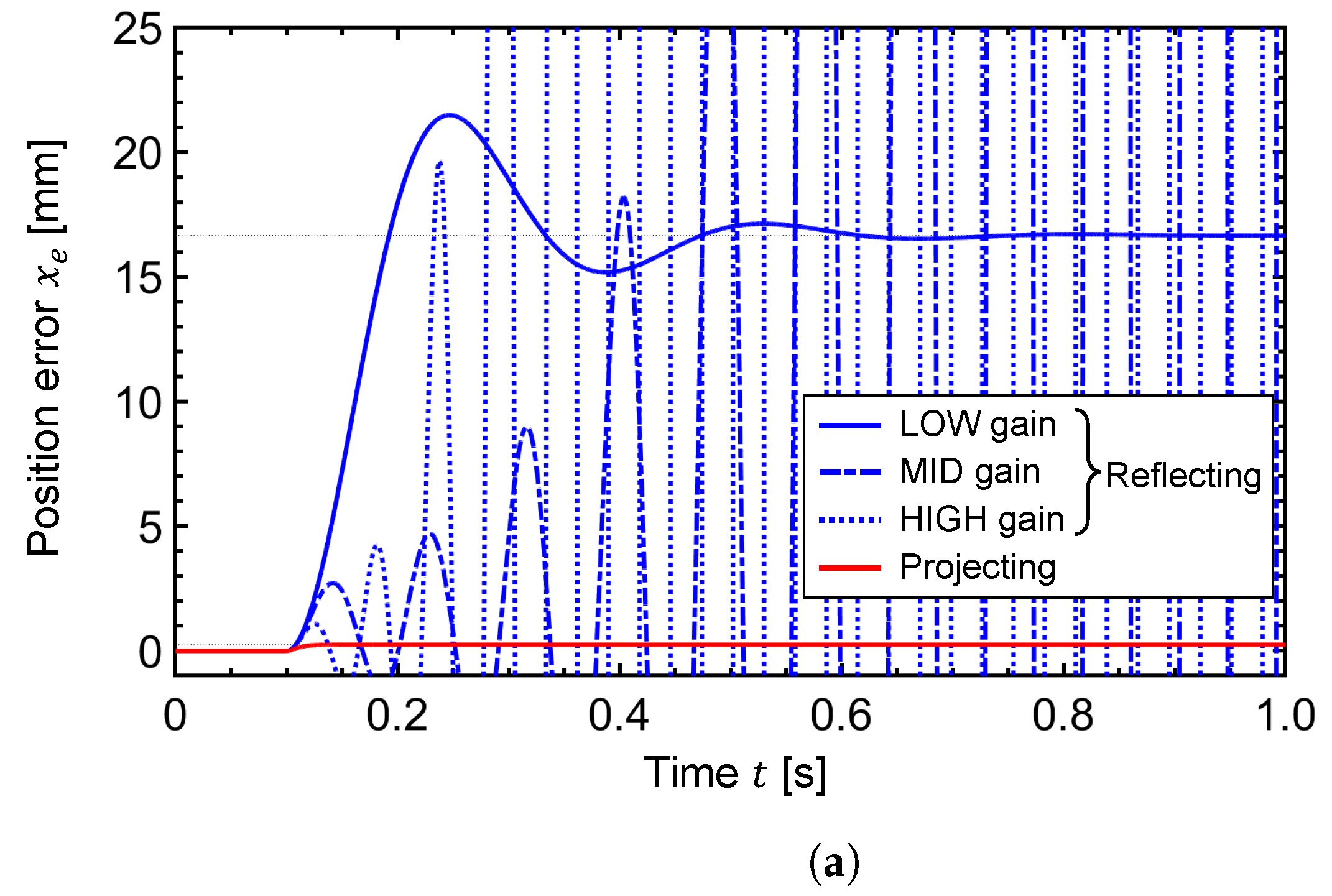
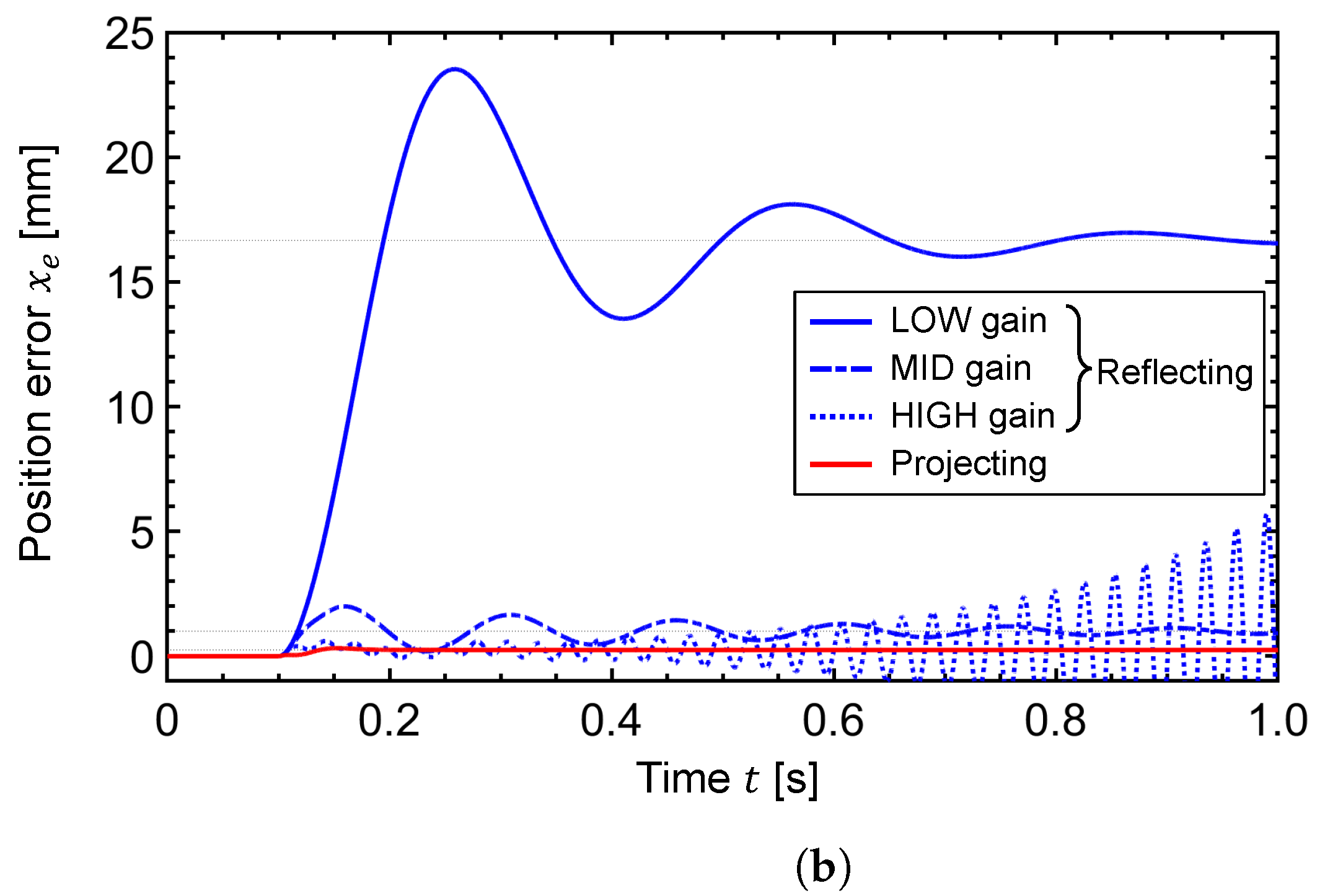
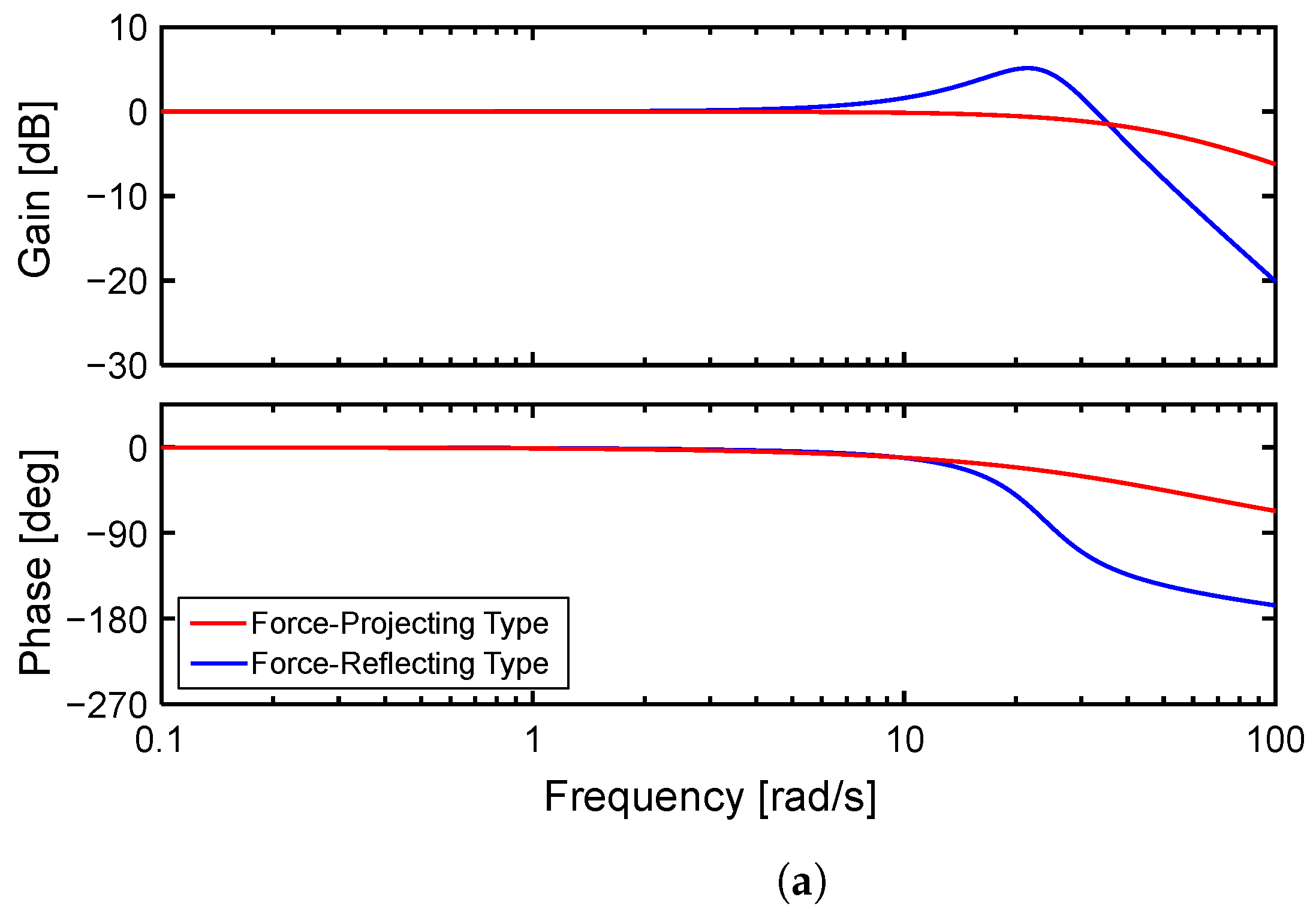
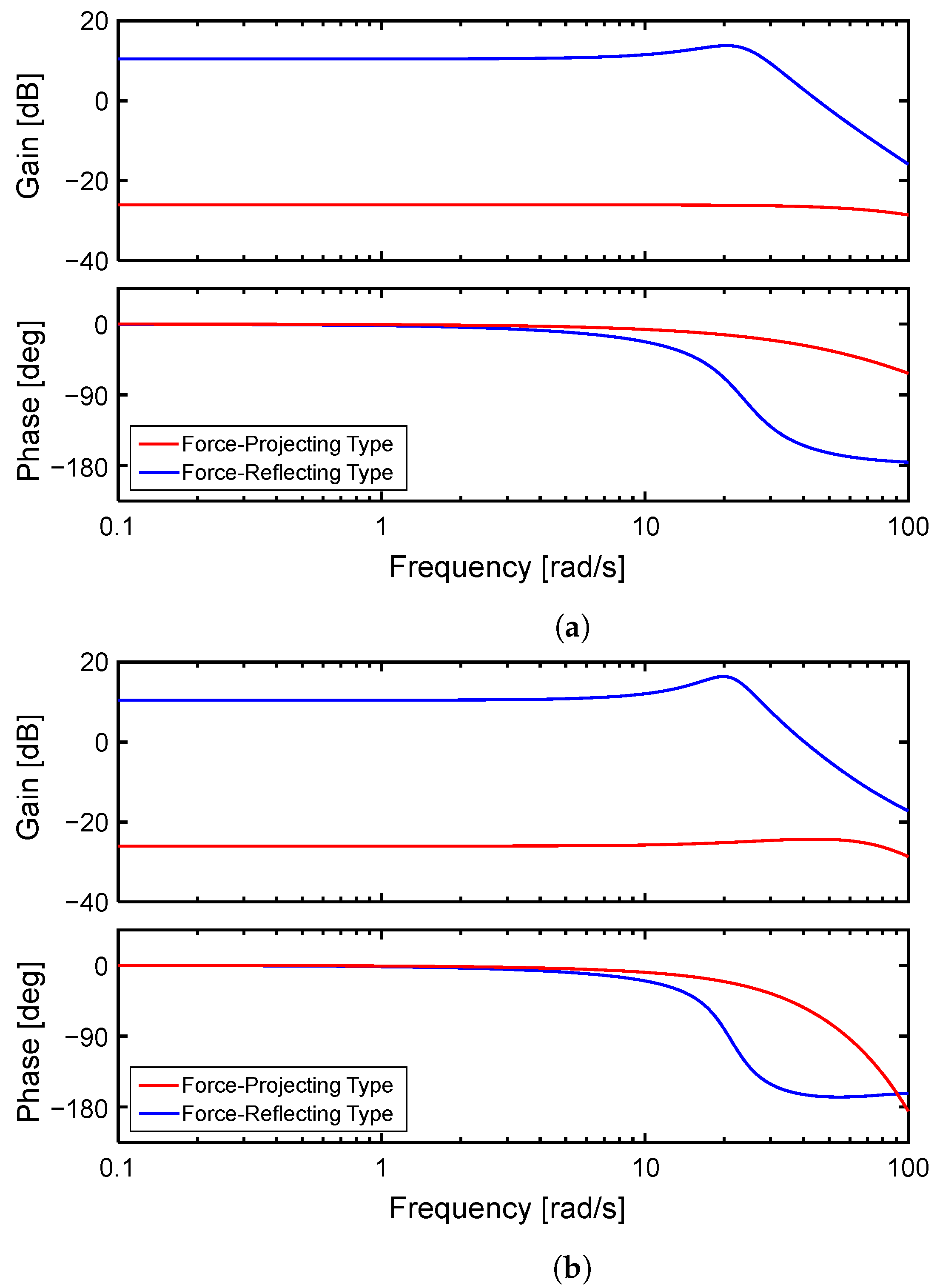
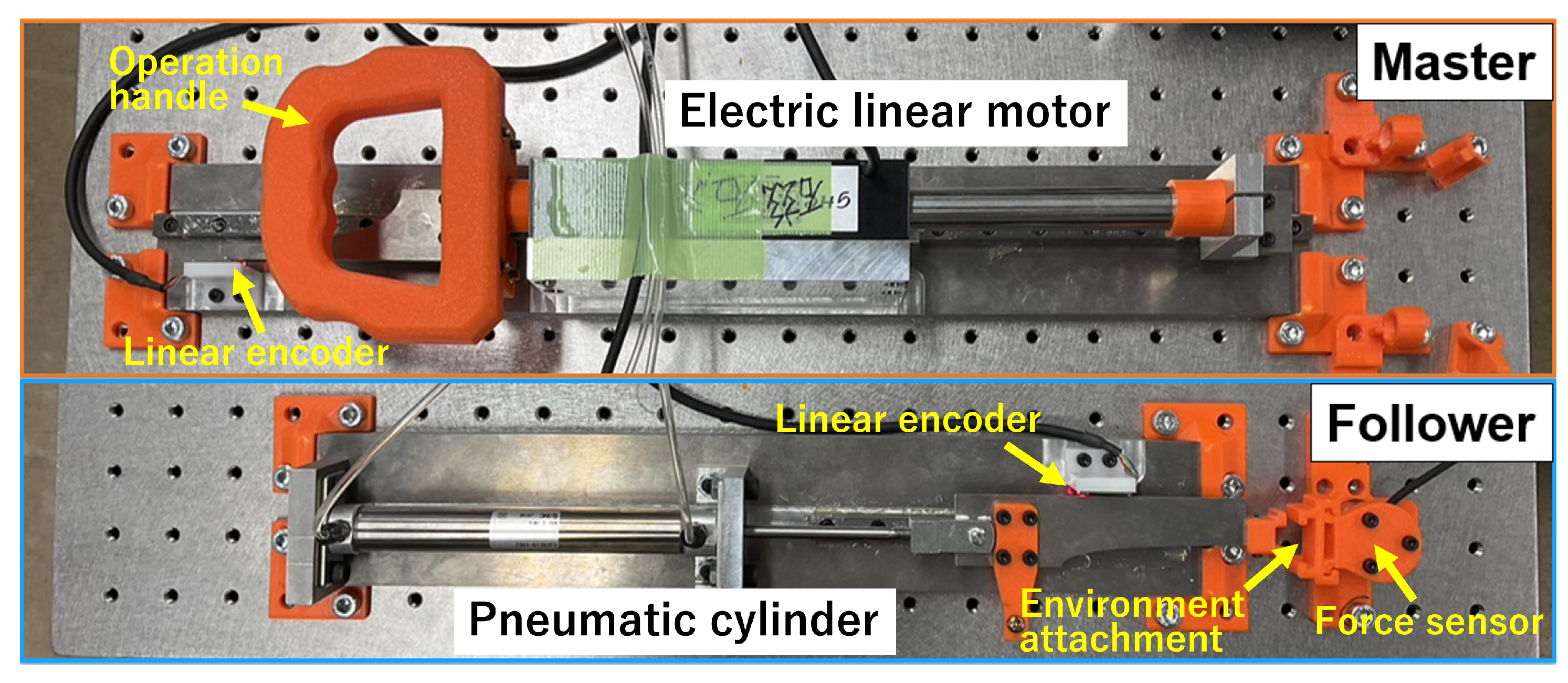
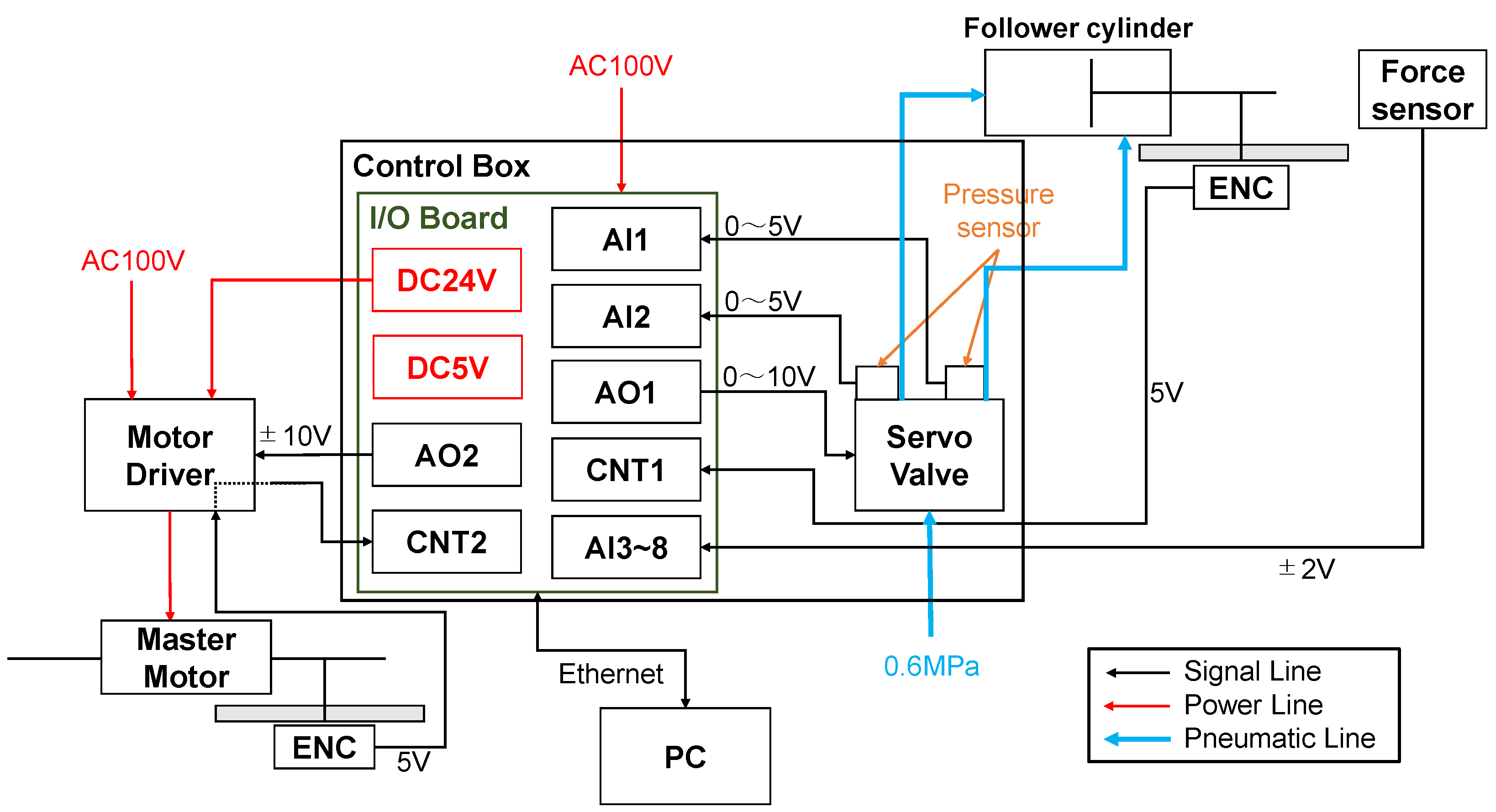
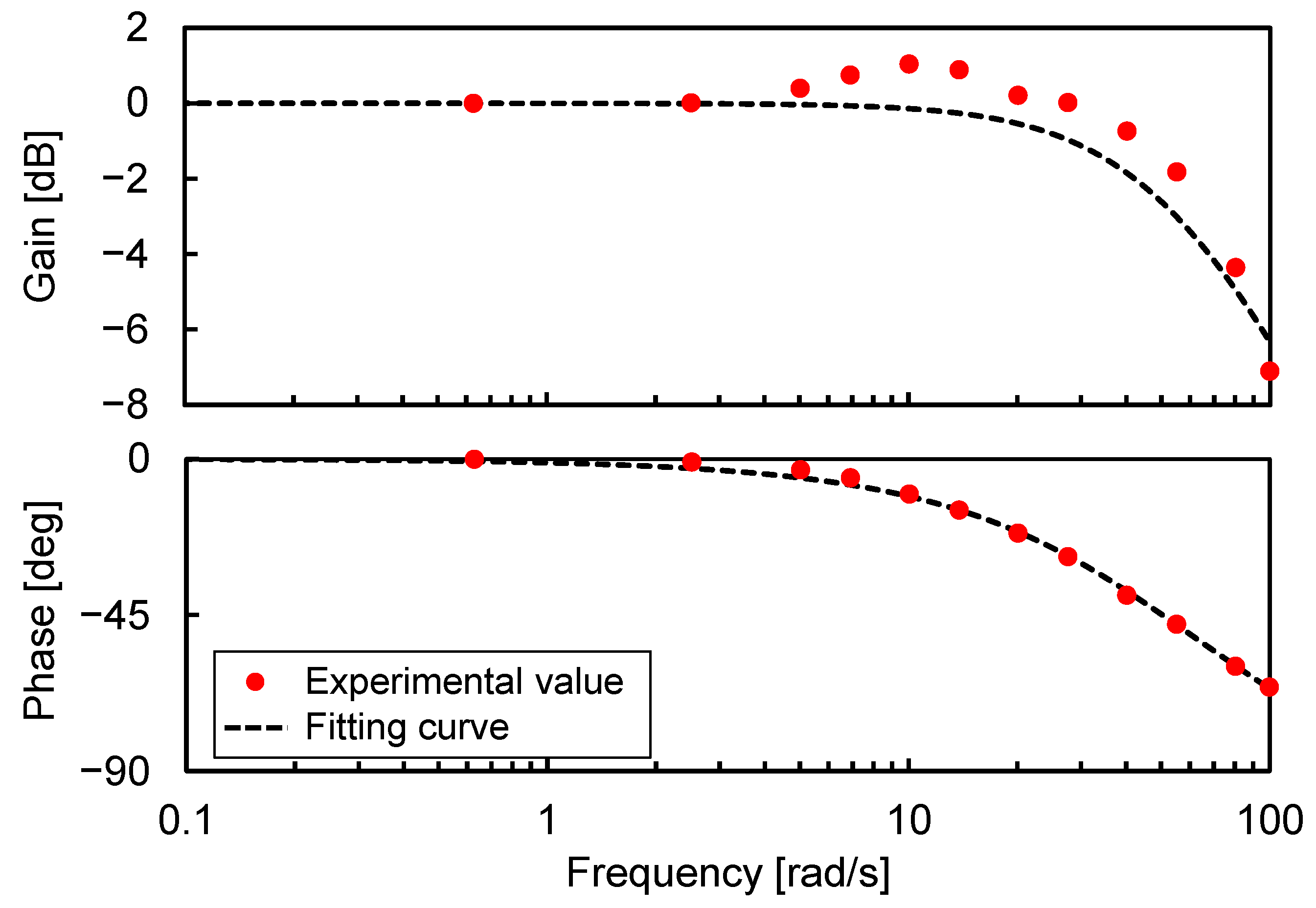
This study deals with a one-degree-of-freedom (DOF) bilateral control system consisting of an electric drive master and a pneumatic drive follower with a single-axis linear motion to simplify the problem and facilitate an essential understanding of the system behavior. First, a theoretical model of the system is constructed, and its transient and frequency responses are investigated by numerical simulation. Next, an actual system is developed assuming a situation in which the follower-side device cannot be equipped with a force sensor. The transient and frequency responses are investigated experimentally in the same way as the simulation. In addition, a manual operation experiment by a human is performed to investigate the system’s behavior and operability. Through numerical analyses and experiments, we compare the control performance and stability of the proposed Force-Projecting Type with those of the conventional Force-Reflecting Type and demonstrate the superiority of the Force-Projecting Type.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}