
ADRC Control of Ultra-High-Speed Electric Air Compressor Considering Excitation Observation

 , , ,
, , ,  , ,
, ,  and
and
Abstract
1. Introduction
- (1)
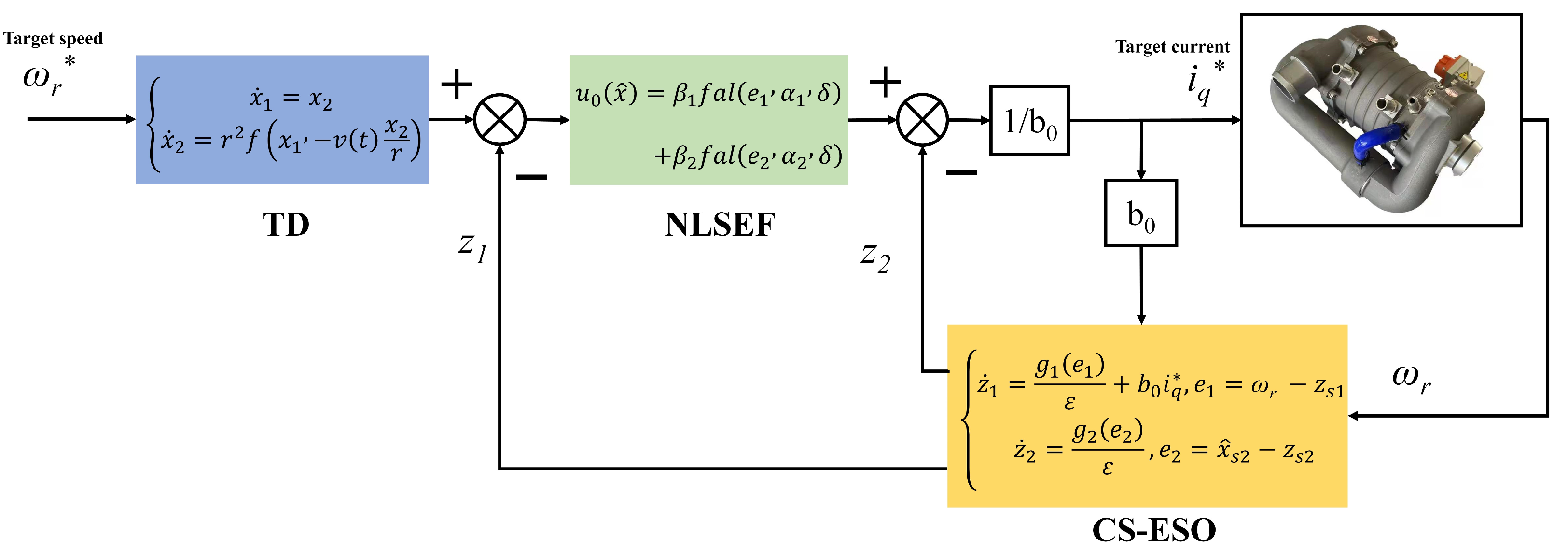
- This paper innovatively proposes a method for stable control of the USHEAC by accurately observing electromagnetic excitation and load excitation. In order to solve the problem of difficulty in accurately observing electromagnetic and load excitation, a cascade connection is added to the original ESO, so that high-frequency electromagnetic and load excitation can be accurately observed.
- (2)
- ESO is the most important component of the ADRC for the speed fluctuation caused by electromagnetic excitation and load excitation at ultra-high speed. The optimized current state extended state observer (CS-ESO) is used to replace the extended state observer (ESO) in the ADRC system. The newly designed ADRC (CS-ESO) significantly alleviates the speed fluctuation of the UHSEAC and speeds up the speed regulation process.
2. UHSEAC Excitation Observation
2.1. UHSEAC Model Establishment
2.2. Theoretical Derivation of CS-ESO
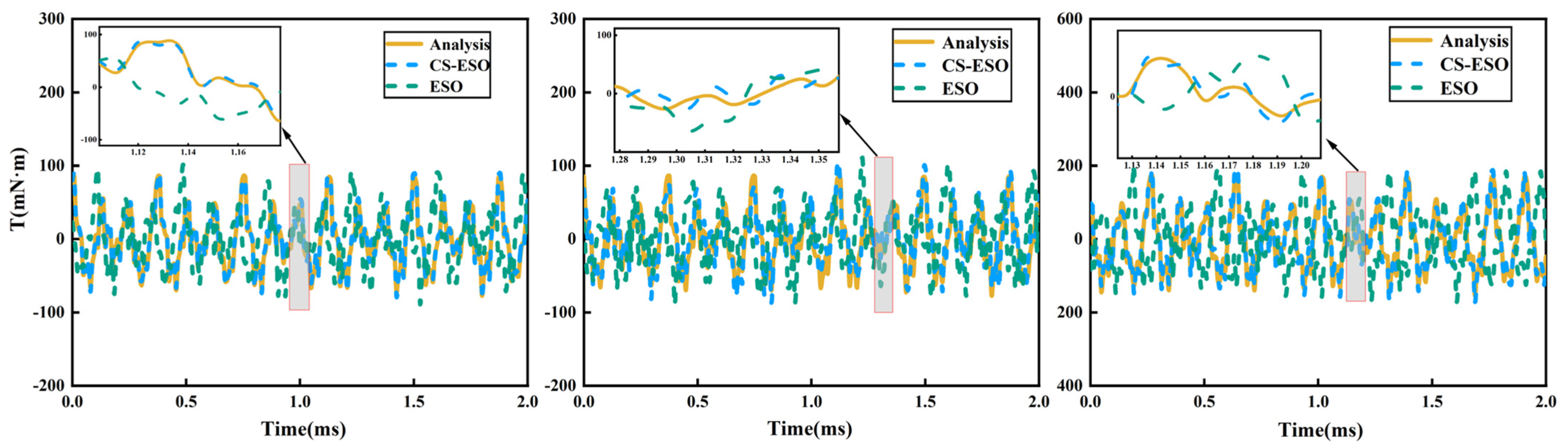
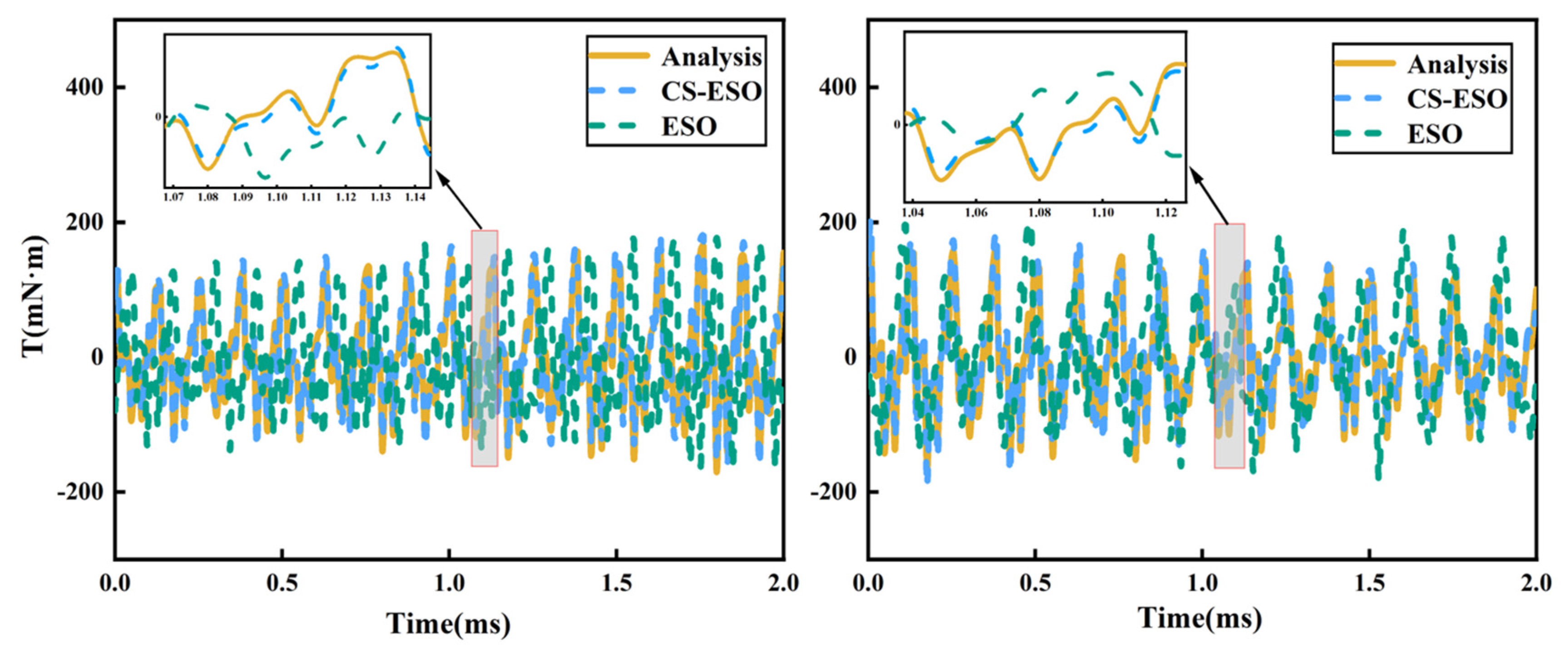
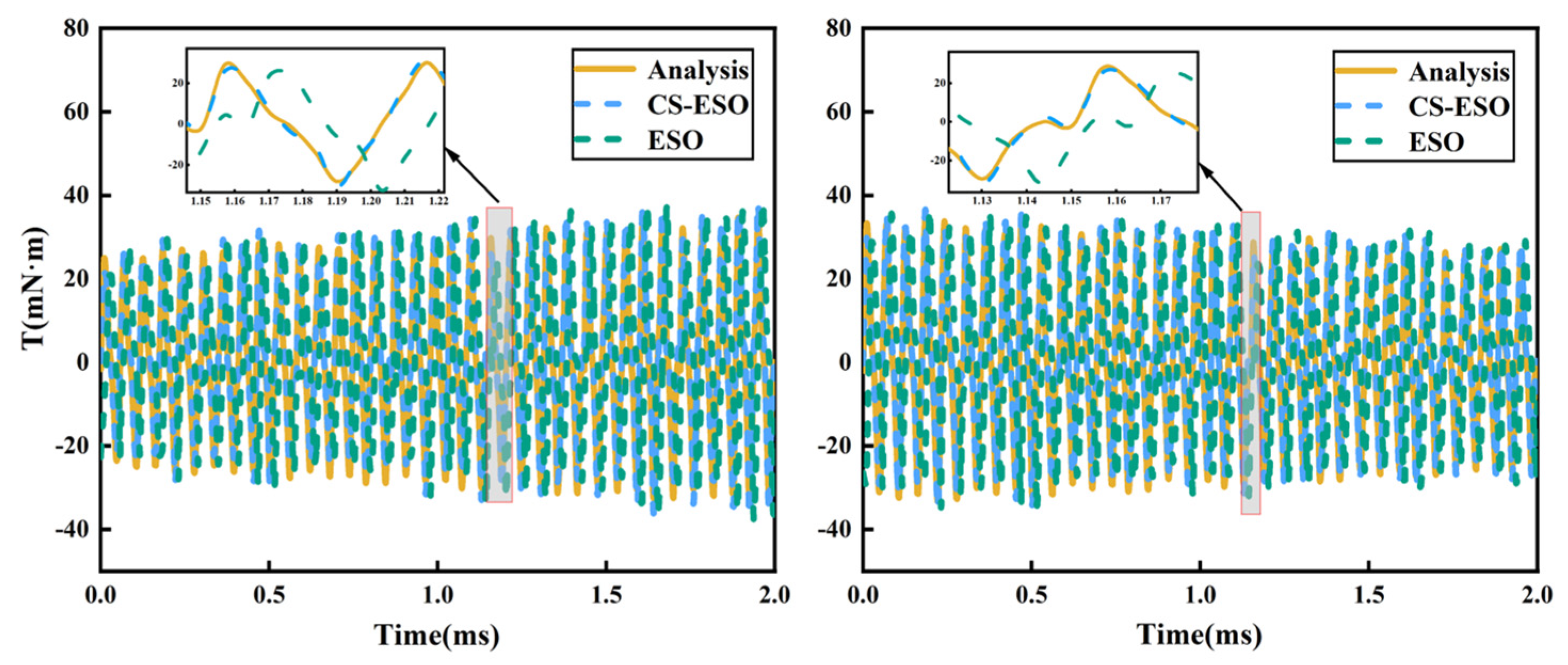
2.3. Analysis of Observation Results of Electromagnetic Excitation and Load Excitation
3. ADRC Design and Analyze Review
3.1. ADRC Design
3.2. ADRC Analysis
4. ADRC Experiment of UHSEAC
5. Conclusions
- (1)
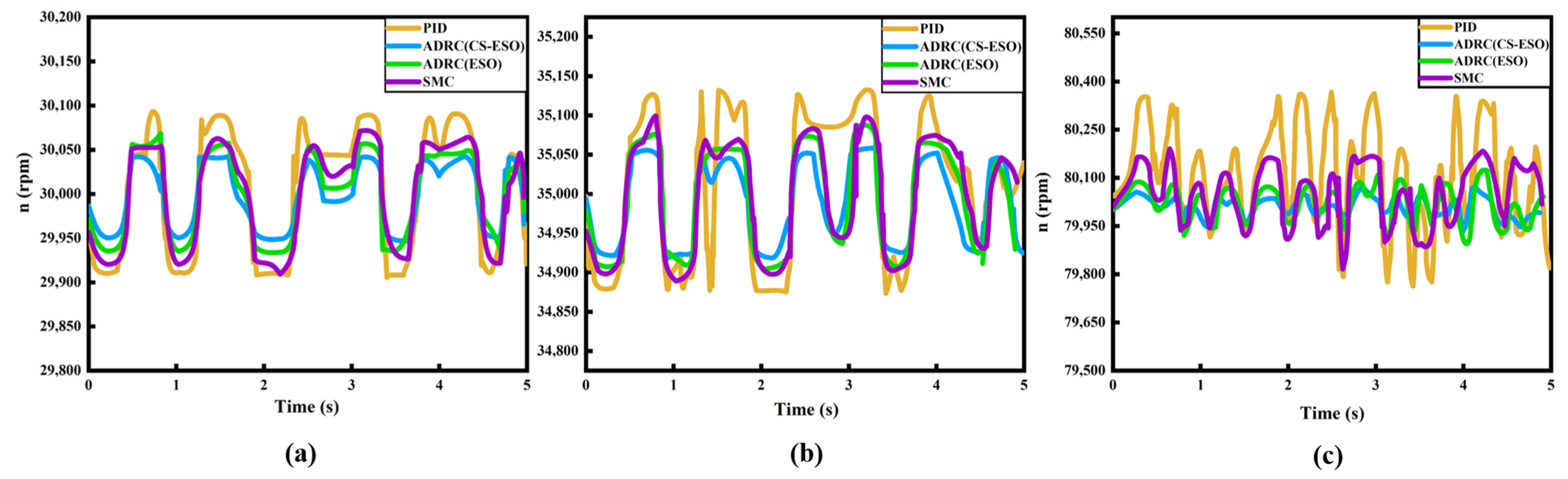
- An ADRC (CS-ESO) was designed based on the improved CS-ESO. Simulation research shows that the maximum average tracking error ratio of electromagnetic excitation is 2.9%, and the maximum average tracking error ratio of load excitation is 2.8%, which proves the effectiveness of the designed the CS-ESO; compared with the PID, ADRC (ESO), and SMC, the ADRC (CS-ESO) has better adjustment under acceleration conditions, the speed adjustment time is 0.35 s, 0.1 s and 0.22 s faster, respectively. The speed adjustment time of the ADRC (CS-ESO) is 0.15 s, 0.03 s, and 0.08 s faster under the deceleration condition, proving the feasibility of the ADRC (CS-ESO) for speed regulation of the UHSEAC.
- (2)
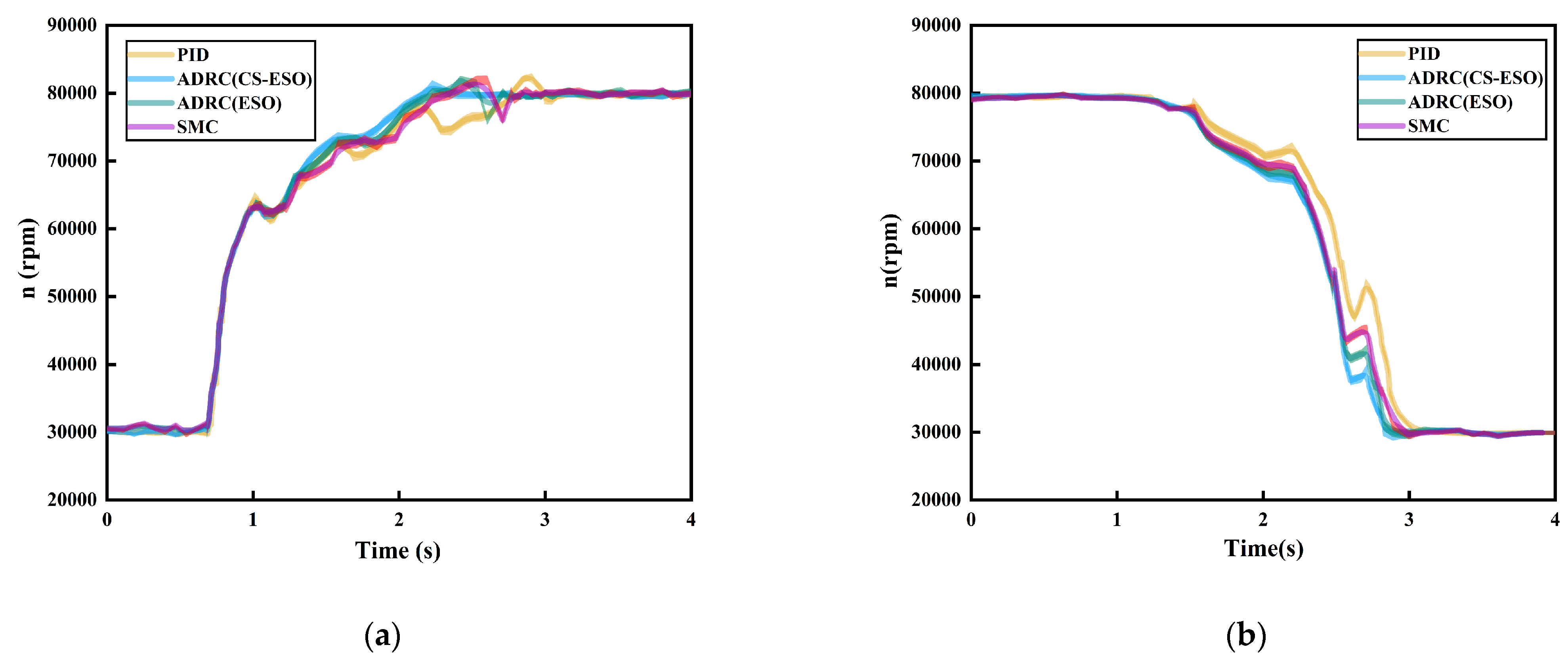
- A comprehensive control experimental platform for fuel cell has been established. And an experimental scheme for UHSEAC self-disturbance rejection has been designed. The experimental results demonstrate this when compared with the PID, the ADRC (ESO) and the Sliding Mode Control (SMC), respectively. Under the increased load condition, the overshoot of the ADRC (CS-ESO) was reduced by 1360 rpm, 760 rpm, and 858 rpm, respectively, the speed adjustment time was shortened by 0.6 s, 0.2 s, and 0.3 s, respectively. Under the reduced load condition, the overshoot of the ADRC (CS-ESO) decreased by 450 rpm, 140 rpm, and 250 rpm, respectively. The speed adjustment time of the ADRC (CS-ESO) was 0.2 s, 0.1 s, and 0.1 s faster, respectively.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ferrara, A.; Jakubek, S.; Hametner, C. Cost-optimal design and energy management of fuel cell electric trucks. Int. J. Hydrogen Energy 2023, 48, 16420–16434. [Google Scholar] [CrossRef]
- Jia, C.; He, H.; Zhou, J.; Li, K.; Li, J.; Wei, Z. A performance degradation prediction model for PEMFC based on bi-directional long short-term memory and multi-head self-attention mechanism. Int. J. Hydrogen Energy 2024, 60, 133–146. [Google Scholar] [CrossRef]
- Li, Y.; Wang, X.; Chen, S.; Lu, H. Nonlinear dynamic response and global stability of an air compressor vibration system. J. Low Freq. Noise Vib. Act. Control 2019, 38, 1081–1095. [Google Scholar] [CrossRef]
- Jia, C.; Liu, W.; He, H.; Chau, K.T. Deep reinforcement learning-based energy management strategy for fuel cell buses integrating future road information and cabin comfort control. Energy Convers. Manag. 2024, 321, 119032. [Google Scholar] [CrossRef]
- Su, Q.; Zhou, J.; Yi, F.; Hu, D.; Lu, D.; Wu, G.; Zhang, C.; Deng, B.; Cao, D. An intelligent control method for PEMFC air supply subsystem to optimize dynamic response performance. Fuel 2024, 361, 130697. [Google Scholar] [CrossRef]
- Qi, R.; Zhang, G. Permanent Magnet Synchronous Motor Vector Control System Based on the Fuzzy PID Controller. In Proceedings of the 2018 3rd International Workshop on Materials Engineering and Computer Sciences (IWMECS 2018), Jinan, China, 27–28 January 2018; Atlantis Press: Amsterdam, The Netherlands, 2018; pp. 379–382. [Google Scholar]
- Senthilkumar, R.; Balamurugan, R. Adaptive Fuzzy-Based SMC for Controlling Torque Ripples in Brushless DC Motor Drive Applications. Cybern. Syst. 2023, 54, 1132–1153. [Google Scholar] [CrossRef]
- Yang, F.; Jiang, F.; Xu, Z.; Qiu, L.; Xu, B.; Zhang, Y.; Yang, K. Complex coefficient ADRCler for current harmonics suppression of IPMSM drives. IEEE Trans. Power Electron. 2022, 37, 10443–10454. [Google Scholar] [CrossRef]
- Luo, Y.; Jin, T.; Li, X.; Qin, X.; Han, Y. Research on Pump Speed Control System Based on Fuzzy PID. Mechanics 2023, 29, 225–234. [Google Scholar] [CrossRef]
- Zhang, X.; Chen, Z.; Liu, C.; Luo, G. Robust speed controller design of pmsm drives by a proportional resonant-based adrc. In Proceedings of the 2021 24th International Conference on Electrical Machines and Systems (ICEMS), Gyeongju, Republic of Korea, 31 October–3 November 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 609–614. [Google Scholar]
- Li, X.; Liu, C.; Wu, S.; Chi, S.; Loh, P.C. Sliding-Mode flux-weakening control with only single current regulator for permanent magnet synchronous motor. IEEE Access 2019, 7, 131616–131626. [Google Scholar] [CrossRef]
- Du, H.; Chen, X.; Wen, G.; Yu, X.; Lu, J. Discrete-time fast terminal sliding mode control for permanent magnet linear motor. IEEE Trans. Ind. Electron. 2018, 65, 9916–9927. [Google Scholar] [CrossRef]
- Zhang, Z.; Wang, Z.; Wei, X.; Liang, Z.; Kennel, R.; Rodriguez, J. Space-vector-optimized predictive control for dual three-phase PMSM with quick current response. IEEE Trans. Power Electron. 2021, 37, 4453–4462. [Google Scholar] [CrossRef]
- Liu, G.; Xu, C.; Wang, L. Modified ADRC design of permanent magnet synchronous motor based on improved memetic algorithm. Sensors 2023, 23, 3621. [Google Scholar] [CrossRef] [PubMed]
- Aboelhassan, A.; Diab, A.M.; Galea, M.; Bozhko, S. Investigating electrical drive performance employing model predictive control and active disturbance rejection control algorithms. In Proceedings of the 2020 23rd International Conference on Electrical Machines and Systems (ICEMS), Hamamatsu, Japan, 24–27 November 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1379–1384. [Google Scholar]
- Huang, Y.; Xue, W. Active disturbance rejection control: Methodology and theoretical analysis. ISA Trans. 2014, 53, 963–976. [Google Scholar] [CrossRef] [PubMed]
- Du, Y.; Cao, W.; She, J. Analysis and design of active disturbance rejection control with an improved extended state observer for systems with measurement noise. IEEE Trans. Ind. Electron. 2022, 70, 855–865. [Google Scholar] [CrossRef]
- Zhu, X.; Shi, H.; Zhang, C.; Du, Y.; Xu, L.; Zhang, L. Speed Ripple Suppression of Permanent Magnet Hub Motor Based on ADRC With Observer Error Constraints. IEEE Trans. Ind. Electron. 2024. early access. [Google Scholar]
- Zhuo, S.; Gaillard, A.; Xu, L.; Bai, H.; Paire, D.; Gao, F. Enhanced robust control of a DC–DC converter for fuel cell application based on high-order extended state observer. IEEE Trans. Transp. Electrif. 2020, 6, 278–287. [Google Scholar] [CrossRef]
- Zhu, J.; Ge, Q.; Sun, P. Extended state observer-based sensorless control for high-speed maglev application in single-feeding mode and double-feeding mode. IEEE Trans. Transp. Electrif. 2021, 8, 1350–1361. [Google Scholar] [CrossRef]
- Zhang, T.; Xu, Z.; Gerada, C. A Nonlinear Extended State Observer for Sensorless IPMSM Drives with Optimized Gains. IEEE Trans. Ind. Appl. 2020, 56, 1485–1494. [Google Scholar] [CrossRef]
- Guo, B.; Bacha, S.; Alamir, M. A review on ADRC based PMSM control designs. In Proceedings of the IECON 2017-43rd annual Conference of the IEEE Industrial Electronics Society, Beijing, China, 29 October–1 November 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1747–1753. [Google Scholar]
- Liu, B. Speed control for permanent magnet synchronous motor based on an improved extended state observer. Adv. Mech. Eng. 2018, 10, 1687814017747663. [Google Scholar] [CrossRef]
- Wei, W.; Xue, W.; Li, D. On disturbance rejection in magnetic levitation. Control Eng. Pract. 2019, 82, 24–35. [Google Scholar] [CrossRef]
- Chen, Z.; Qin, B.; Sun, M.; Sun, Q. Q-learning-based parameters adaptive algorithm for active disturbance rejection control and its applicationto ship course control. Neurocomputing 2020, 408, 51–63. [Google Scholar] [CrossRef]
- Ran, M.; Li, J.; Xie, L. A new extended state observer for uncertain nonlinear systems. Automatica 2021, 131, 109772. [Google Scholar] [CrossRef]
- Ekanayake, S.; Dutta, R.; Rahman, M.F.; Xiao, D. Deep flux weakening control of a segmented interior permanent magnet synchronous motor with maximum torque per voltage control. In Proceedings of the IECON 2015-41st Annual Conference of the IEEE Industrial Electronics Society, Yokohama, Japan, 9–12 November 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 004802–004807. [Google Scholar]
- Jin, D.; Zhang, H.; Zhu, S.; Wang, A.; Jiang, J. Two-vector predictive current control strategy based on maximum torque per ampere control for PMSMs. J. Power Electron. 2022, 22, 1313–1323. [Google Scholar] [CrossRef]
- Chen, Z.; Zong, X.; Tang, W.; Huang, D. Design of rapid exponential integral nonlinear tracking differentiator. Int. J. Control 2022, 95, 1759–1766. [Google Scholar] [CrossRef]
- He, K.; Dong, C.; Wang, Q. ADRC for Uncertain Nonlinear Systems with Sporadic Measurements. IEEE/CAA J. Act. Sin. 2022, 9, 893–906. [Google Scholar] [CrossRef]
- Lu, D.; Yi, F.; Hu, D.; Li, J.; Yang, Q.; Wang, J. Online optimization of energy management strategy for FCV control parameters considering dual power source lifespan decay synergy. Appl. Energy 2023, 348, 121516. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value | Unit |
|---|---|---|
| Stator winding resistance, Rm | 98 | mΩ |
| d. q-axis inductance, L | 0.25 | mH |
| Rotor flux linkage, ψr | 58 | mWb |
| Rated speed, n0 | 80,000 | rpm |
| Number of pole pairs, np | 1 |
| Method | Parameter | Idling Condition & On/Off Blowing Condition | Rated Speed Working Condition | Load-Increasing & Load-Reducing |
|---|---|---|---|---|
| ADRC(CS-ESO) | β1 | 5000 | 5300 | 5450 |
| β2 | 1030 | 1450 | 1500 | |
| α | 0.9 | 0.9 | 0.9 | |
| δ | 0.01 | 0.01 | 0.01 | |
| ADRC(ESO) | β1 | 4500 | 4800 | 5150 |
| β2 | 1300 | 1650 | 1700 | |
| α | 0.9 | 0.9 | 0.9 | |
| δ | 0.01 | 0.01 | 0.01 | |
| PID | Kp | 10 | 13 | 15 |
| Ki | 0.5 | 0.5 | 0.5 | |
| Kd | 0 | 0 | 0 | |
| SMC | Q | 300 | 350 | 385 |
| Mu | 200 | 200 | 200 | |
| C | 60 | 83 | 96 |
| Parameters | Parameters | Unit |
|---|---|---|
 | Type | PEMFC |
| Model | XC88 | |
| Power rating (kW) | 88 | |
| Peak power (kW) | 100 | |
 | Rated rotation speed (r/min) | 80,000 |
| Rated torque (Nm) | 2.0 | |
| Rated power (kW) | 22 | |
 | rated current (A) | 65 |
| input voltage (V) | 250–750 | |
| Switch frequency range (kHz) | 0~110 |
| Method | Parameter | Load-Increasing & Load-Reducing |
|---|---|---|
| ADRC(CS-ESO) | β1 | 5300 |
| β2 | 1460 | |
| α | 0.9 | |
| δ | 0.01 | |
| ADRC(ESO) | β1 | 4900 |
| β2 | 1400 | |
| α | 0.9 | |
| δ | 0.01 | |
| PID | Kp | 15 |
| Ki | 0.5 | |
| Kd | 0 | |
| SMC | Q | 380 |
| Mu | 200 | |
| C | 92 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, J.; Li, Y.; Zhang, J.; Yi, F.; Feng, C.; Zhang, C.; Deng, B.; Qi, H.; Wang, Y.; Wang, S. ADRC Control of Ultra-High-Speed Electric Air Compressor Considering Excitation Observation. Actuators 2024, 13, 420. https://doi.org/10.3390/act13100420
Zhou J, Li Y, Zhang J, Yi F, Feng C, Zhang C, Deng B, Qi H, Wang Y, Wang S. ADRC Control of Ultra-High-Speed Electric Air Compressor Considering Excitation Observation. Actuators. 2024; 13(10):420. https://doi.org/10.3390/act13100420
Chicago/Turabian StyleZhou, Jiaming, Yingzheng Li, Jinming Zhang, Fengyan Yi, Chunxiao Feng, Caizhi Zhang, Bo Deng, Honglei Qi, Yu Wang, and Shuo Wang. 2024. "ADRC Control of Ultra-High-Speed Electric Air Compressor Considering Excitation Observation" Actuators 13, no. 10: 420. https://doi.org/10.3390/act13100420
APA StyleZhou, J., Li, Y., Zhang, J., Yi, F., Feng, C., Zhang, C., Deng, B., Qi, H., Wang, Y., & Wang, S. (2024). ADRC Control of Ultra-High-Speed Electric Air Compressor Considering Excitation Observation. Actuators, 13(10), 420. https://doi.org/10.3390/act13100420