

Piezoelectric Shunt Damping for a Planar Motor Application under Cryogenic Conditions


Abstract
1. Introduction
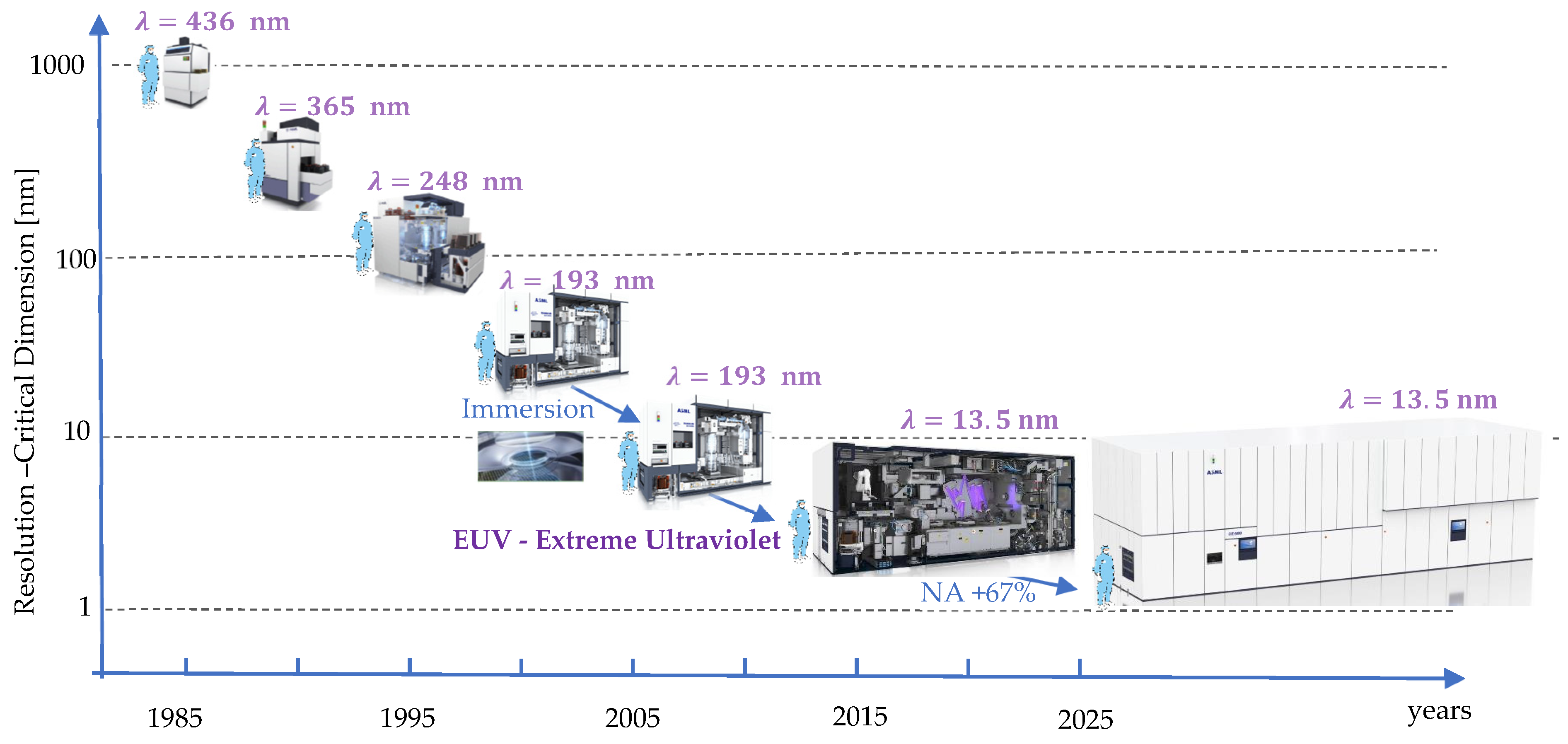
1.1. Mechatronics Overview of a Photolithography Scanner
1.2. Toward Superconducting Motors
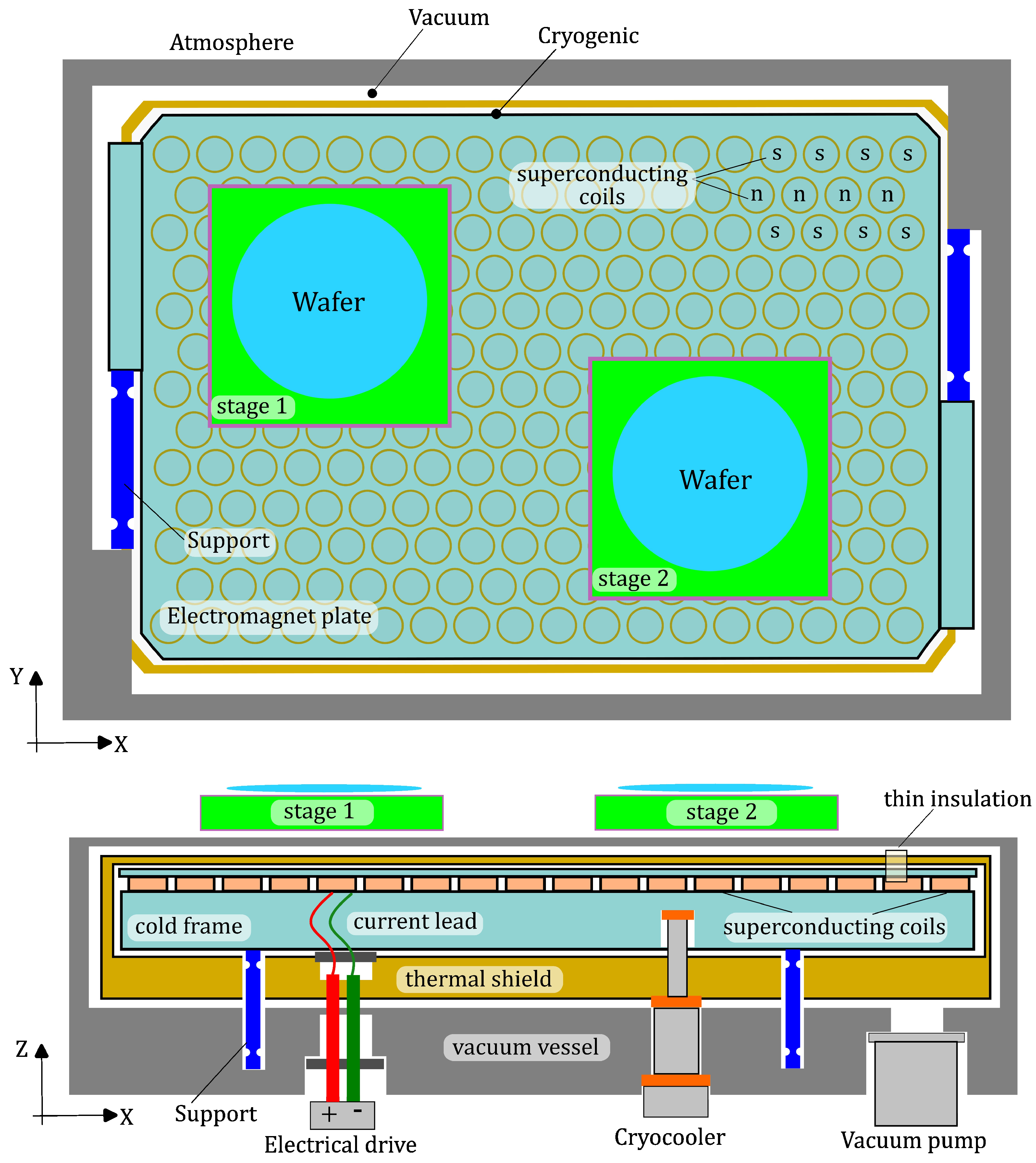
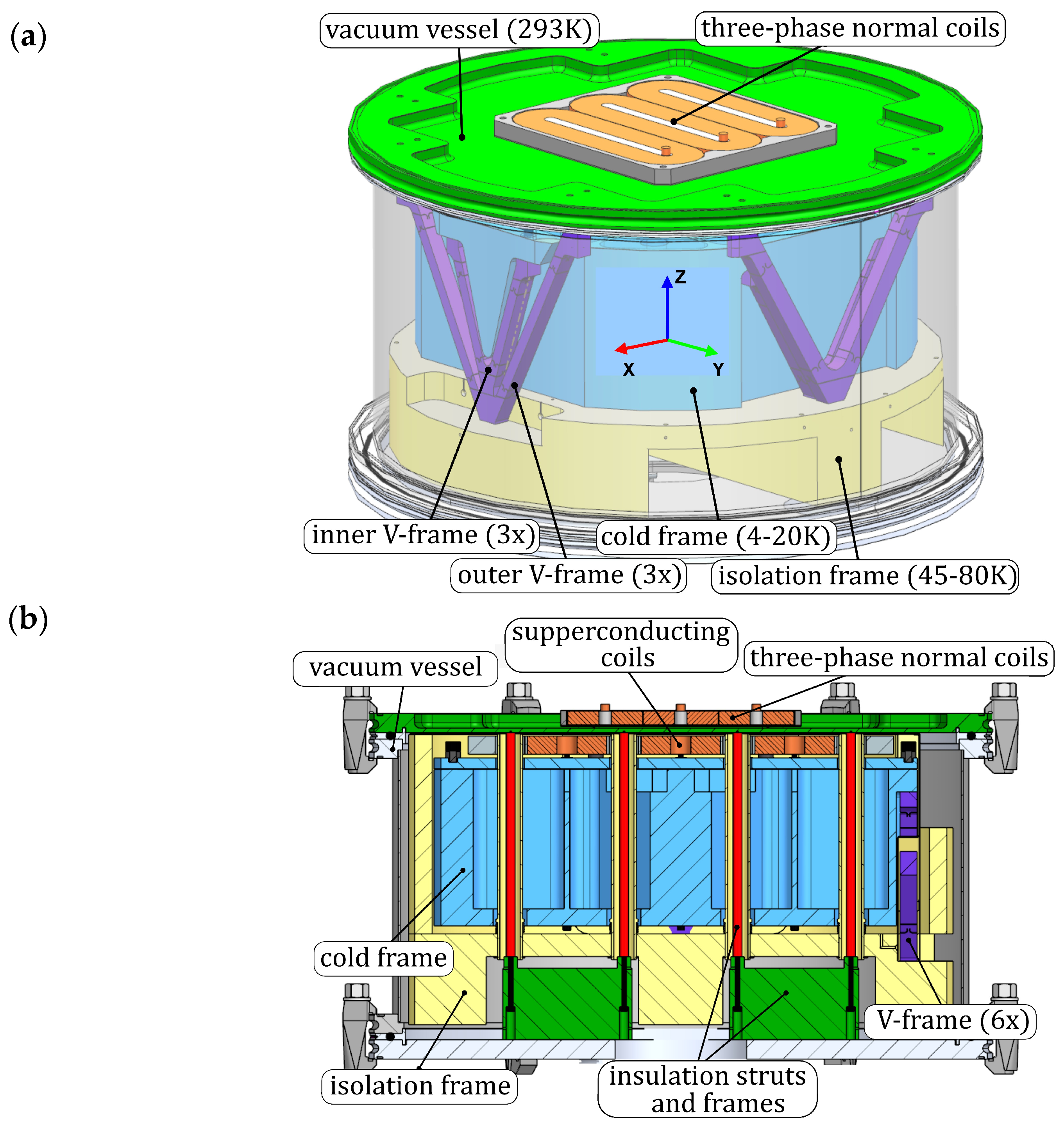
1.3. Demonstrator Setup
2. Passive Damping Solutions
3. Eddy Current Damping
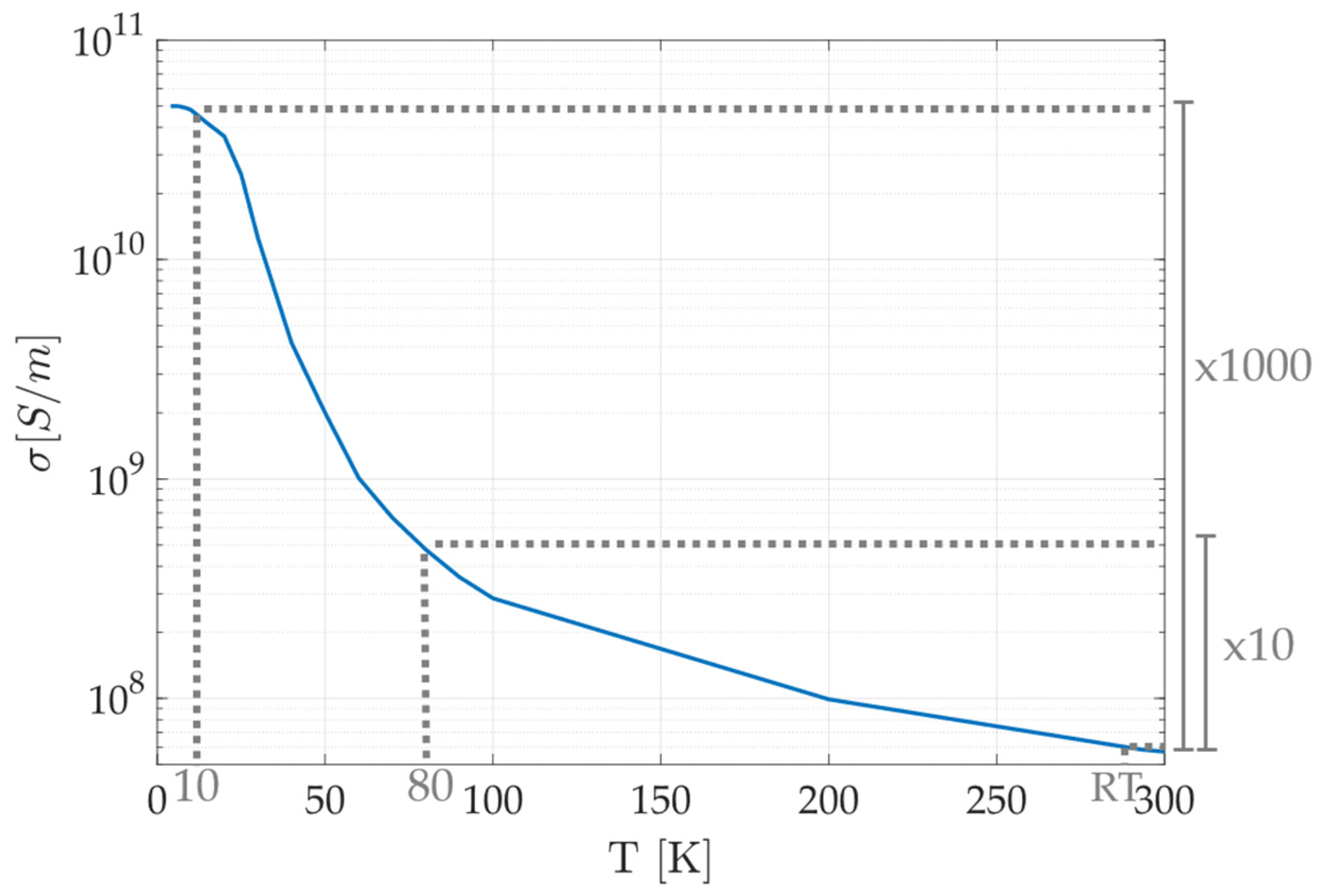
3.1. Increased Performance under Cryogenic Conditions
3.2. Limiting Penetration Depth
3.3. Insufficient Damping for the Planar Motor Application
4. Piezoelectric Shunt Damping
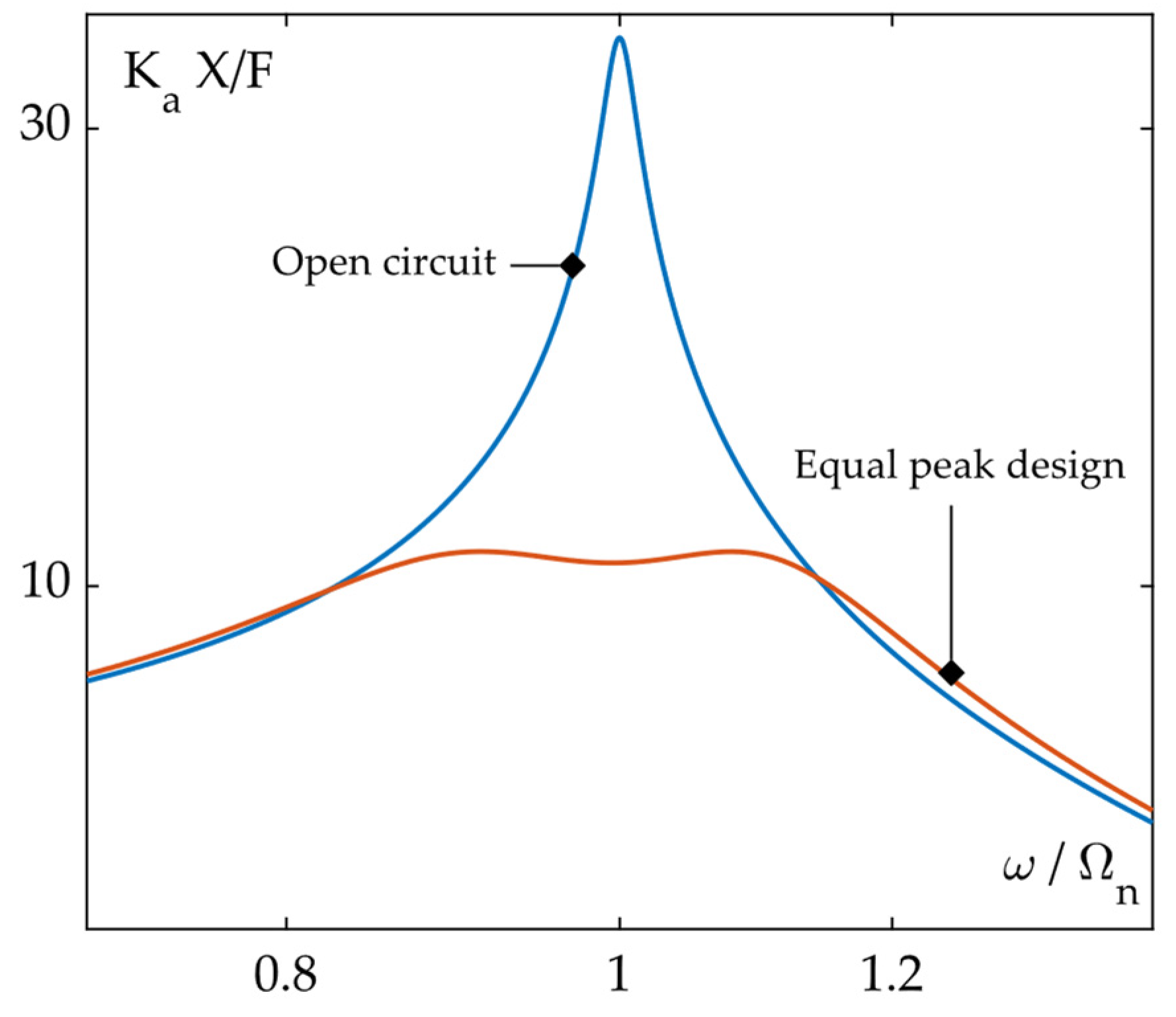
4.1. RL Shunt Damping
4.2. Shunt Circuit Tuning
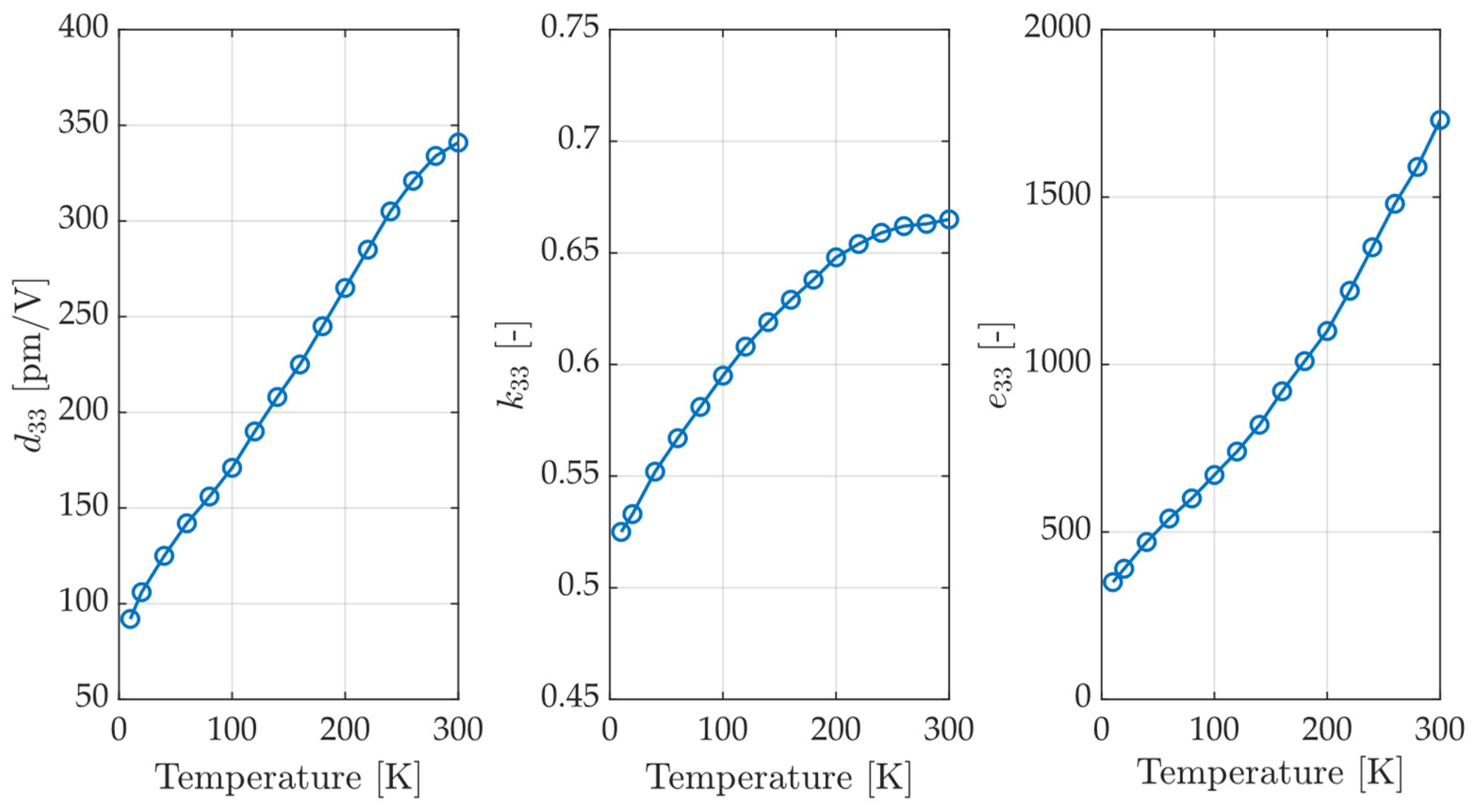
4.3. Cryogenic Properties of the Piezoelectric PZT Material
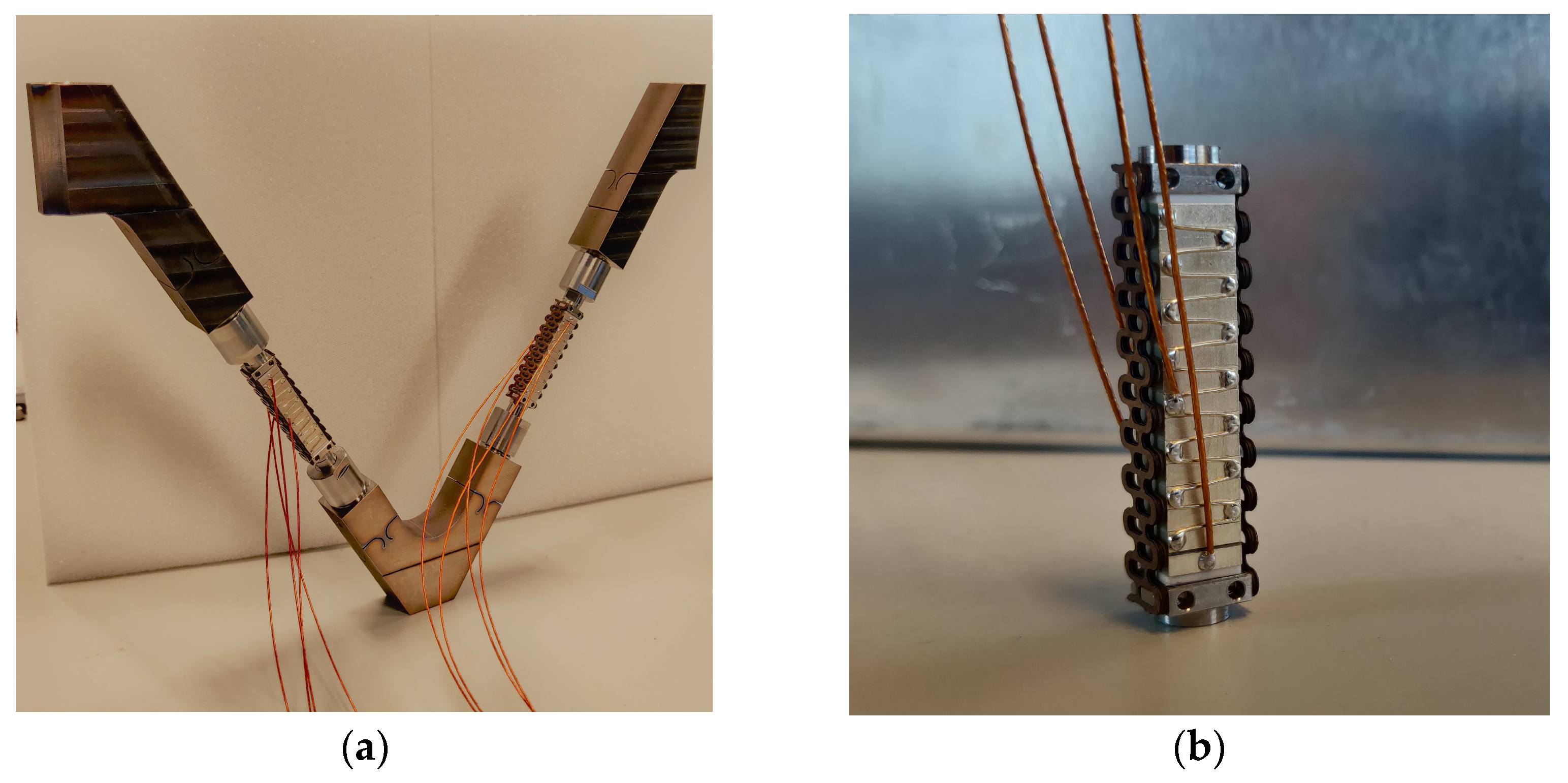
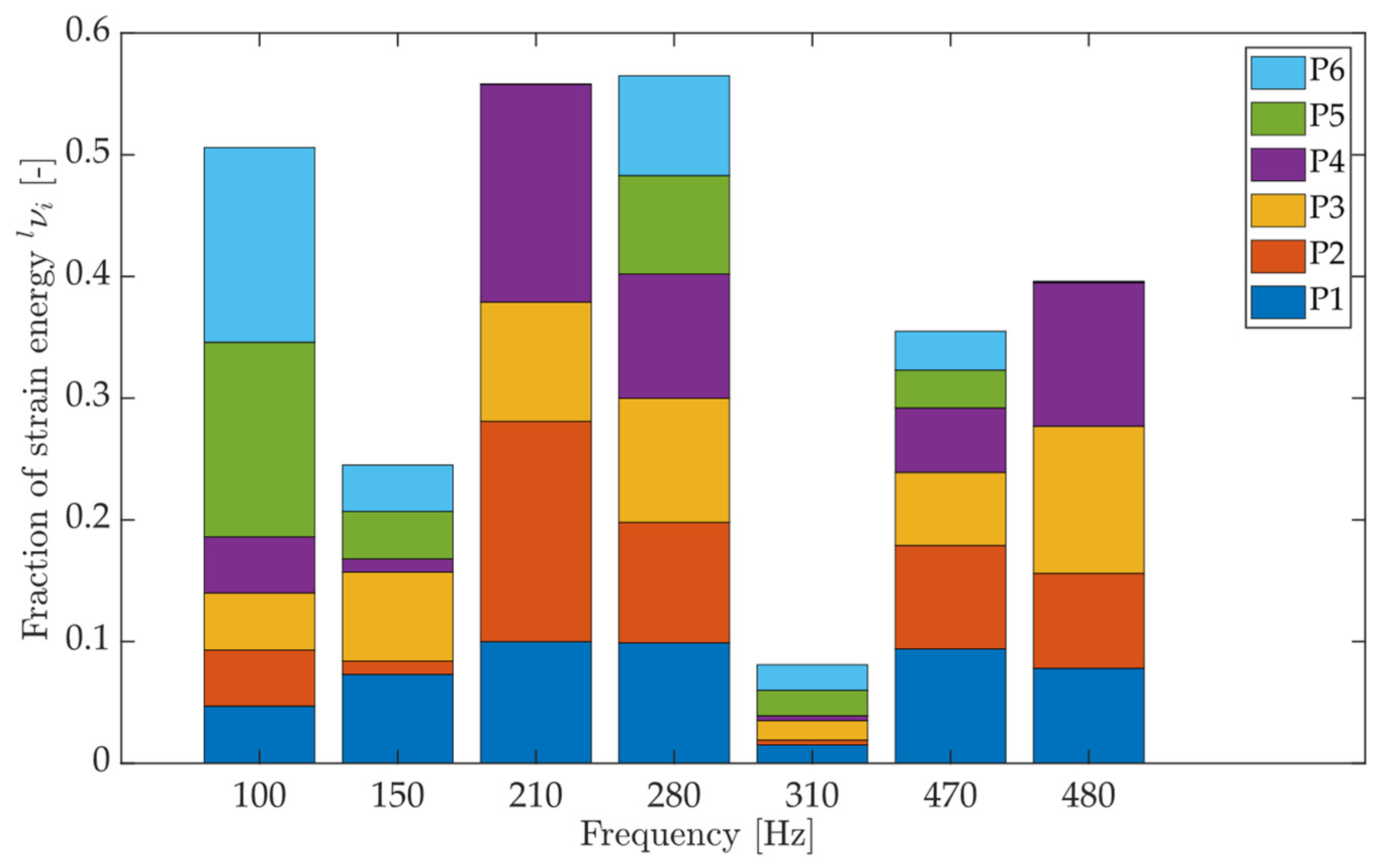
5. Experimental Implementation
6. Experimental Validation
6.1. Shunt Damping at Room Temperature
6.2. Shunt Damping at Cryogenic Temperatures
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- van Schoot, J.; van Setten, E.; Troost, K.; Lok, S.; Peeters, R.; Stoeldraijer, J.; Benschop, J.; Zimmerman, J.; Gräupner, P.; Kürtz, P.; et al. High-NA EUV lithography exposure tool program progress. In Proceedings of the SPIE Advanced Lithography, San Jose, CA, USA, 23–27 February 2020. [Google Scholar]
- De Bruyn, B.J.H. Superconducting Linear Motors for High-Density Applications. Ph.D. Thesis, Eindhoven University of Technology, Eindhoven, The Netherlands, 2018. [Google Scholar]
- Koolmees, H.B.; de Bruyn, B.J.H.; Vermeulen, J.P.M.B.; Jansen, J.W.; Lomonova, E.A. On the Performance Potential of Superconducting Linear and Planar Motors. In Proceedings of the 17th Euspen International Conference, Hannover, Germany, 29 May 2017–2 June 2017. [Google Scholar]
- Koolmees, H.B.; Vermeulen, J.P.M.B. High Stiffness Cryogenic Support without Thermal. Conductance. Patent No. WO 2019072529 A1, 11 October 2017. [Google Scholar]
- Koolmees, H.B.; Vermeulen, J.P.M.B. High stiffness fixation and thermal insulation in a superconducting planar motor. In Proceedings of the 18th Euspen International Conference, Venice, Italy, 4–8 June 2018; pp. 3908–3913. [Google Scholar]
- Koolmees, H.B. A Superconducting Magnet Plate for a Planar Motor Application. Ph.D. Thesis, Eindhoven University of Technology, Eindhoven, The Netherlands, 2020. [Google Scholar]
- Lakes, R.S. High damping composite materials. J. Compos. Mater. 2002, 36, 287–297. [Google Scholar] [CrossRef]
- Levine, M.B.; White, C. Material damping experiments at cryogenic temperatures. In Proceedings of the Optical Materials and Structures Technologies, SPIE 48th Annual Meeting, San Diego, CA, USA, 4–7 August 2003; Volume 5179, p. 165. [Google Scholar]
- Gunter, E.J.; Humpris, R.R. Design Study of Magnetic Eddy Current Dampers for Application to Cryogenic Turbo-Machinery. Report No. UVA/528210/MAE84/101, Contractor Report NASA Grant NAG-3-263; University of Virginia: Charlottesville, VA, USA, 1983. [Google Scholar]
- Cunningham, R.E. Passive Eddy-Current Damping as a Means of Vibration Control in Cryogenic Turbomachinery; NASA Tech Paper 2562; Lewis Research Center: Cleveland, OH, USA, 1986. [Google Scholar]
- NASA Tech Port. Cryogenic Vibration Damping Mechanisms for Space Telescopes and Interferometers; California Jet Propulsion Laboratory: La Cañada Flintridge, CA, USA, 2005. Available online: https://techport.nasa.gov/view/5809 (accessed on 1 May 2024).
- Zheng, J.; Deng, Z.; Zhang, Y.; Wang, W.; Wang, S.; Wang, J. Performance improvement of high temperature superconducting maglev system by eddy current damper. IEEE Trans. Appl. Supercond. 2009, 19, 2148–2151. [Google Scholar] [CrossRef]
- Jiang, Z.F.; Gou, X.F. Eddy damping effect of additional conductors in superconducting levitation systems. Phys. C Supercond. Its Appl. 2015, 519, 112–117. [Google Scholar] [CrossRef]
- Sodano, H.A.; Bae, J.S.; Inman, D.J.; Belvin, W.K. Concept and model of eddy current damper for vibration suppression of a beam. J. Sound Vib. 2005, 288, 1177–1196. [Google Scholar] [CrossRef]
- Janssen Precision Engineering. Cryogenic Material Properties. Available online: http://www.jpe-innovations.com/precision-point/cryogenic-material-properties/ (accessed on 1 May 2024).
- Gripp, J.A.B.; Rade, D.A. Vibration and noise control using shunted piezoelectric transducers: A review. Mech. Syst. Signal Process. 2018, 112, 359–383. [Google Scholar] [CrossRef]
- Johnson, W.C. Transmission Lines and Networks, 1st ed.; McGraw-Hill: New York, NY, USA, 1950; pp. 58–79. [Google Scholar]
- Marakakis, K.; Tairidis, G.K.; Koutsianitis, P.; Stavroulakis, G.E. Shunt piezoelectric systems for noise and vibration control: A review. Front. Built Environ. 2019, 5, 64. [Google Scholar] [CrossRef]
- Jaffe, H. Piezoelectric ceramics. J. Am. Ceram. Soc. 1958, 41, 494–498. [Google Scholar] [CrossRef]
- Taylor, R.P.; Nellis, G.F.; Klein, S.A.; Hoch, D.W.; Fellers, J.; Roach, P.; Park, J.M.; Gianchandani, Y. Measurements of the material properties of a laminated piezoelectric stack at cryogenic temperatures. AIP Conf. 2006, 824, 200–207. [Google Scholar]
- Jiang, X.; Cook, W.B.; Hackenberger, W.S. Cryogenic piezoelectric actuators. In Astronomical and Space Optical Systems; SPIE: San Diego, CA, USA, 2009; Volume 7439, p. 74390Z. [Google Scholar]
- Mokrani, B. Piezoelectric Shunt Damping of Rotationally Periodic Structures. Ph.D. Thesis, Université Libre de Bruxelles, Brussels, Belgium, 2015. [Google Scholar]
- Tsai, H.C.; Lin, G.C. Explicit formulae for optimum absorber parameters for force excited and viscously damped systems. J. Sound Vib. 1994, 176, 585–596. [Google Scholar] [CrossRef]
- Zhang, X.L.; Chen, Z.X.; Cross, L.E.; Schulze, W.A. Dielectric and piezoelectric properties of modified lead titanate zirconate ceramics from 4.2 to 300 K. J. Mater. Sci. 1983, 18, 968–972. [Google Scholar] [CrossRef]
- Naimon, E.R.; Weston, W.F.; Ledbetter, H.M. Elastic properties of two titanium alloys at low temperatures. Cryogenics 1974, 14, 246–249. [Google Scholar] [CrossRef]
- Sabat, R.G.; Mukherjee, B.K.; Ren, W.; Yang, G. Temperature dependence of the complete material coefficients matrix of soft and hard doped piezoelectric lead zirconate titanate ceramics. J. Appl. Phys. 2007, 101, 064111. [Google Scholar] [CrossRef]
- Antoniou, A.; Naidu, K.S. Modeling of a gyrator circuit. IEEE Trans. Circuit Theory 1973, 20, 533–540. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Isolation Frame | Cold Frame | |
|---|---|---|
| 80 K | 10 K | |
| 50–500 Hz | 500–1000 Hz | |
| 5–10% | 1–2% |
| [-] | ||
|---|---|---|
| 293 | 0.67 | 18.5 |
| 80 | 0.58 | 15.0 |
| 4 | 0.52 | 13.7 |
| 293 | 10.2 | 7.5 |
| 200 | 10.3 | 7.5 |
| 100 | 9.0 | 6.6 |
| 80 | 8.5 | 6.3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ambaum, N.; Mokrani, B.; Vermeulen, H. Piezoelectric Shunt Damping for a Planar Motor Application under Cryogenic Conditions. Actuators 2024, 13, 405. https://doi.org/10.3390/act13100405
Ambaum N, Mokrani B, Vermeulen H. Piezoelectric Shunt Damping for a Planar Motor Application under Cryogenic Conditions. Actuators. 2024; 13(10):405. https://doi.org/10.3390/act13100405
Chicago/Turabian StyleAmbaum, Niek, Bilal Mokrani, and Hans Vermeulen. 2024. "Piezoelectric Shunt Damping for a Planar Motor Application under Cryogenic Conditions" Actuators 13, no. 10: 405. https://doi.org/10.3390/act13100405
APA StyleAmbaum, N., Mokrani, B., & Vermeulen, H. (2024). Piezoelectric Shunt Damping for a Planar Motor Application under Cryogenic Conditions. Actuators, 13(10), 405. https://doi.org/10.3390/act13100405