
Direct Adaptive Fuzzy Control with Prescribed Tracking Accuracy for Orbit Adjustment of Satellites




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- a
- For satellite systems with nonlinear dynamics and uncertainties in modeling, we tackle the presence of uncertain nonlinear functions by harnessing a fuzzy logic system that incorporates a class of elegant smooth functions. Simultaneously, we take into account a refined fuzzy weight function that encompasses the approximation error of the fuzzy logic system. Ultimately, based on the Lyapunov function, we devise a feedback controller to ensure the stable operation of the satellite within predetermined orbits in diverse directions.
- b
- Our control scheme effectively circumvents the potential singularity issues that may arise in backstepping controller design, ensuring the absence of differential terms involving virtual controllers. Furthermore, by incorporating a norm, we guarantee that the inclusion of fuzzy logic systems does not lead to an increase in the number of adaptive laws. In our proposed control scheme, a solitary adaptive law suffices for design purposes.
- c
- We establish an norm bound to evaluate the transient performance of tracking errors and propose a methodology for adjusting the reference trajectory, enabling a reduction in the established norm bound as required. This approach allows us to achieve satisfactory transient performance of tracking errors in addition to meeting the specified steady-state tracking performance.
2. Preliminaries and Problem Statement
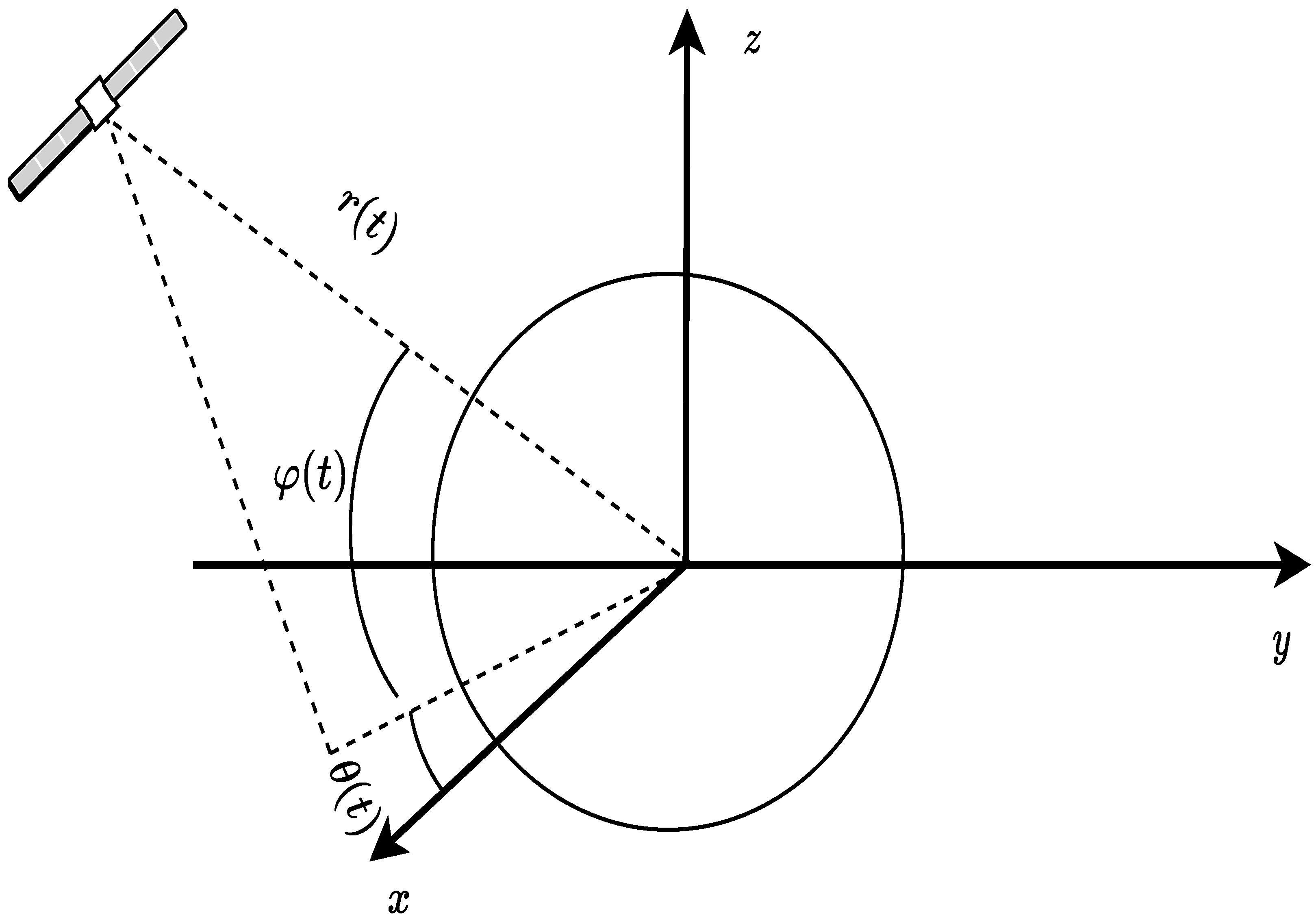
2.1. System Description
2.2. Fuzzy Logic Systems
3. Prescribed Adaptive Fuzzy Control Scheme
3.1. A Class of Smooth Functions
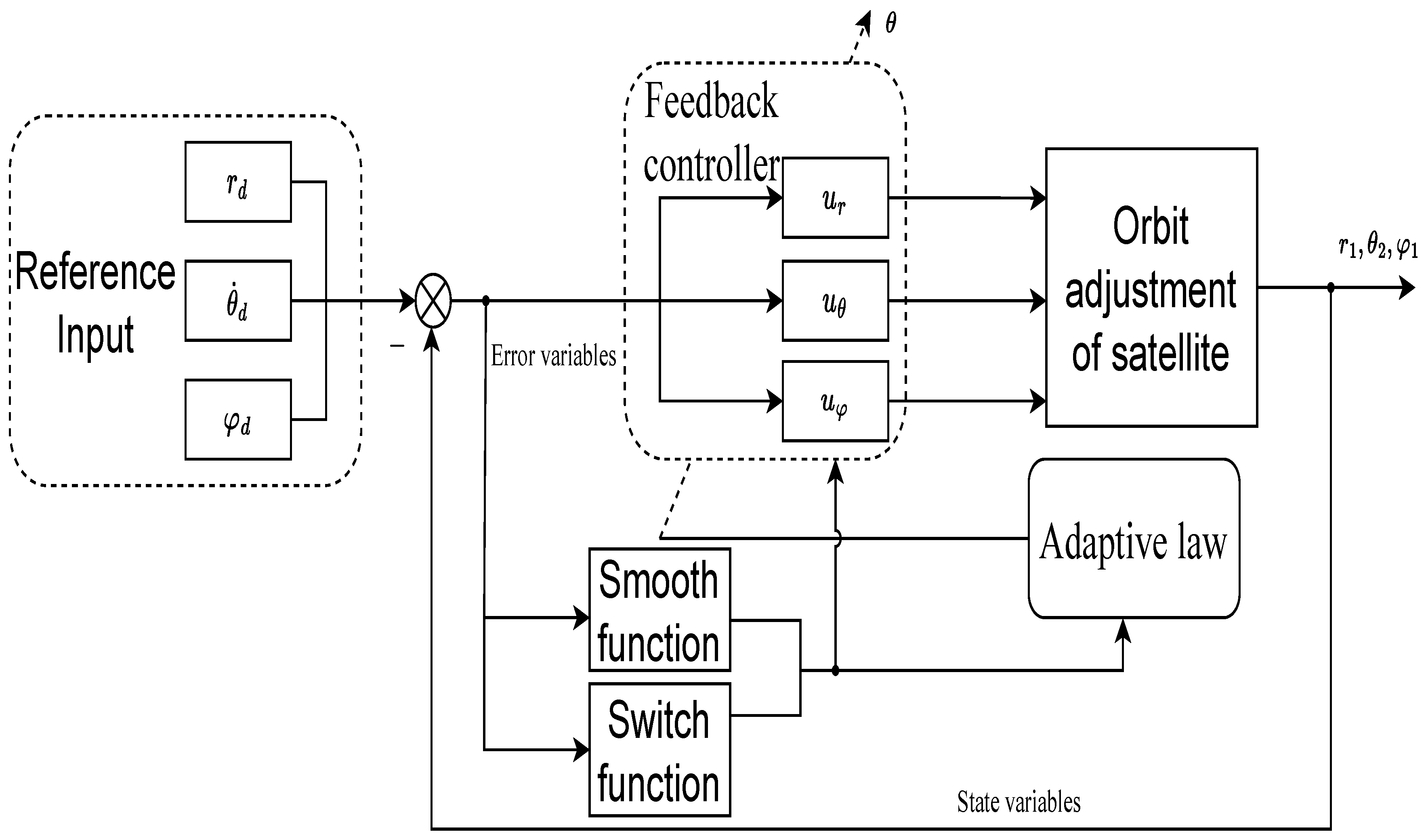
3.2. Feedback Controller Design
3.3. Stability Analysis
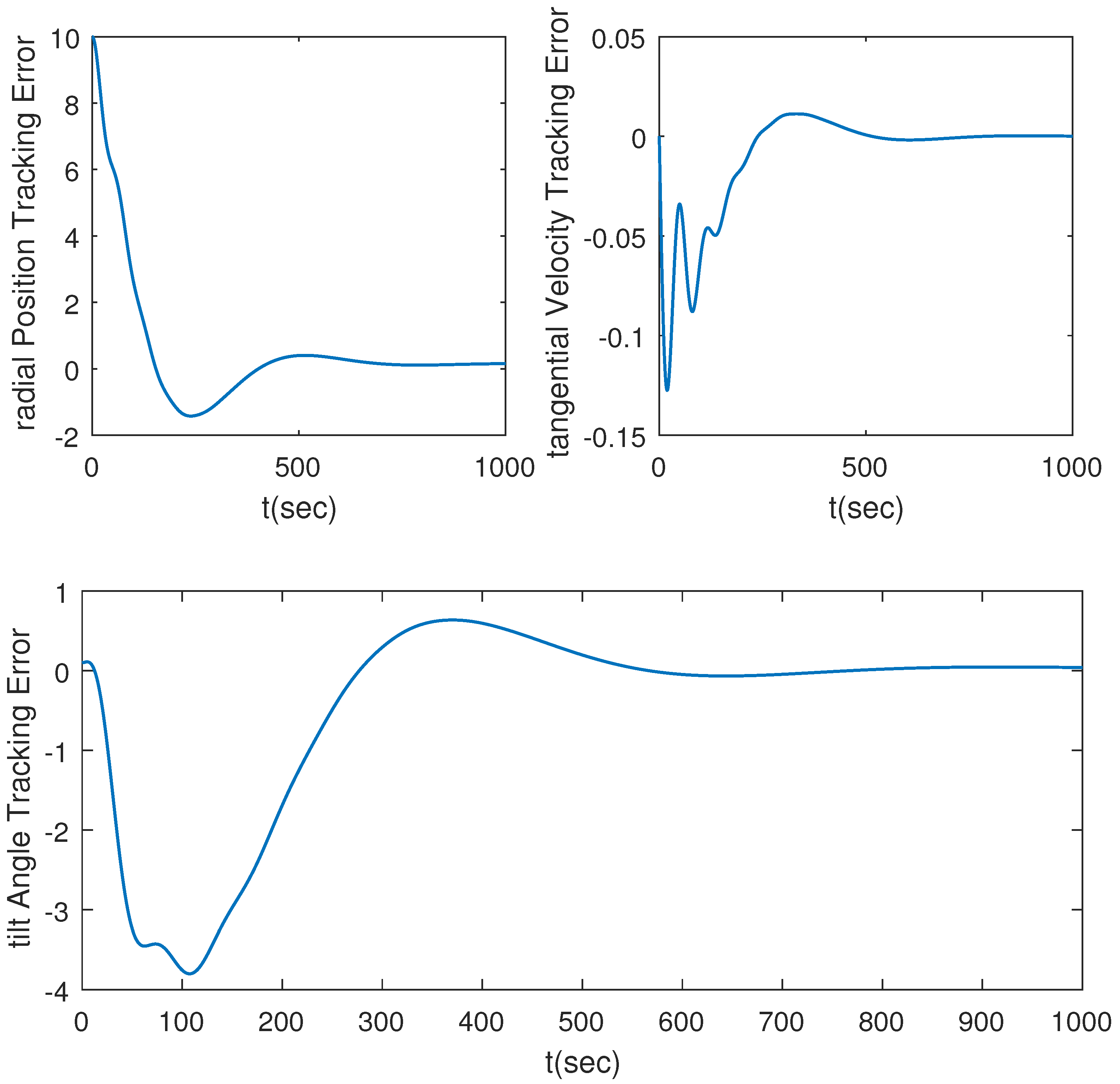
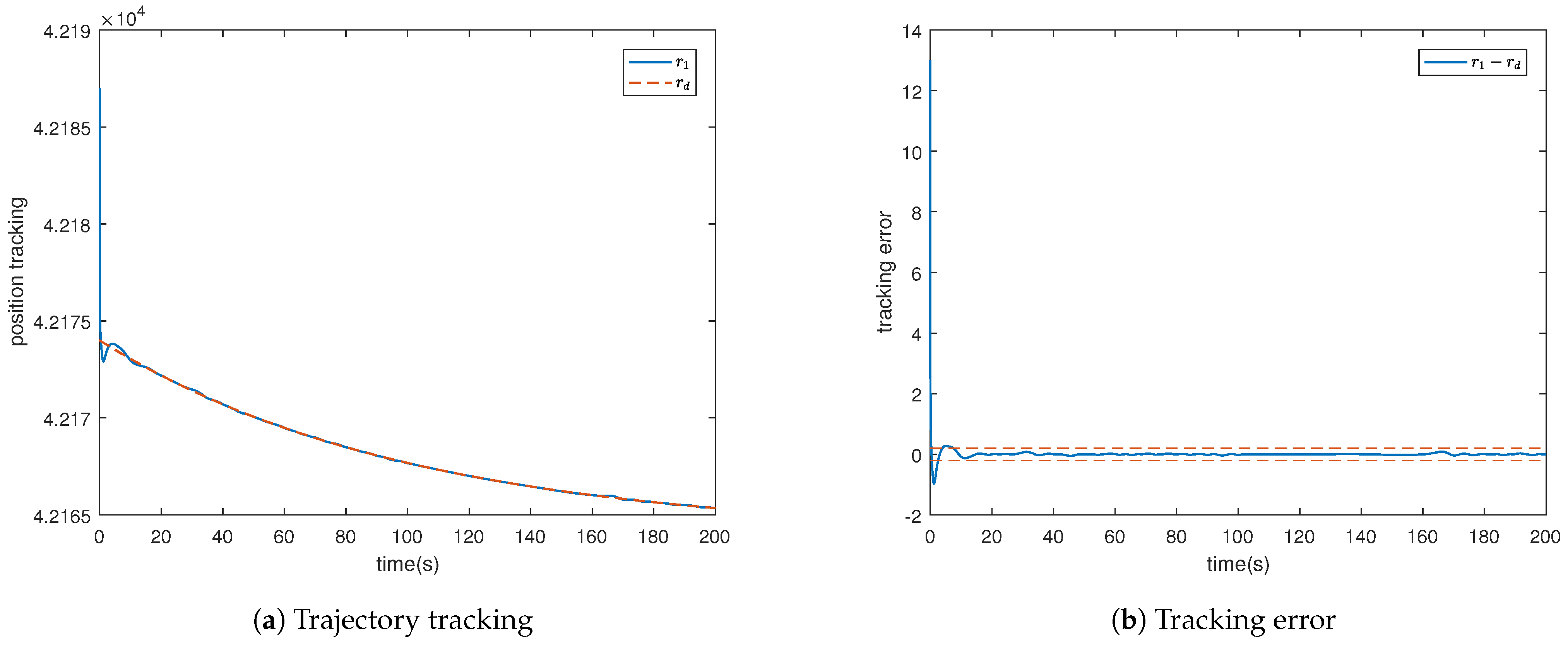
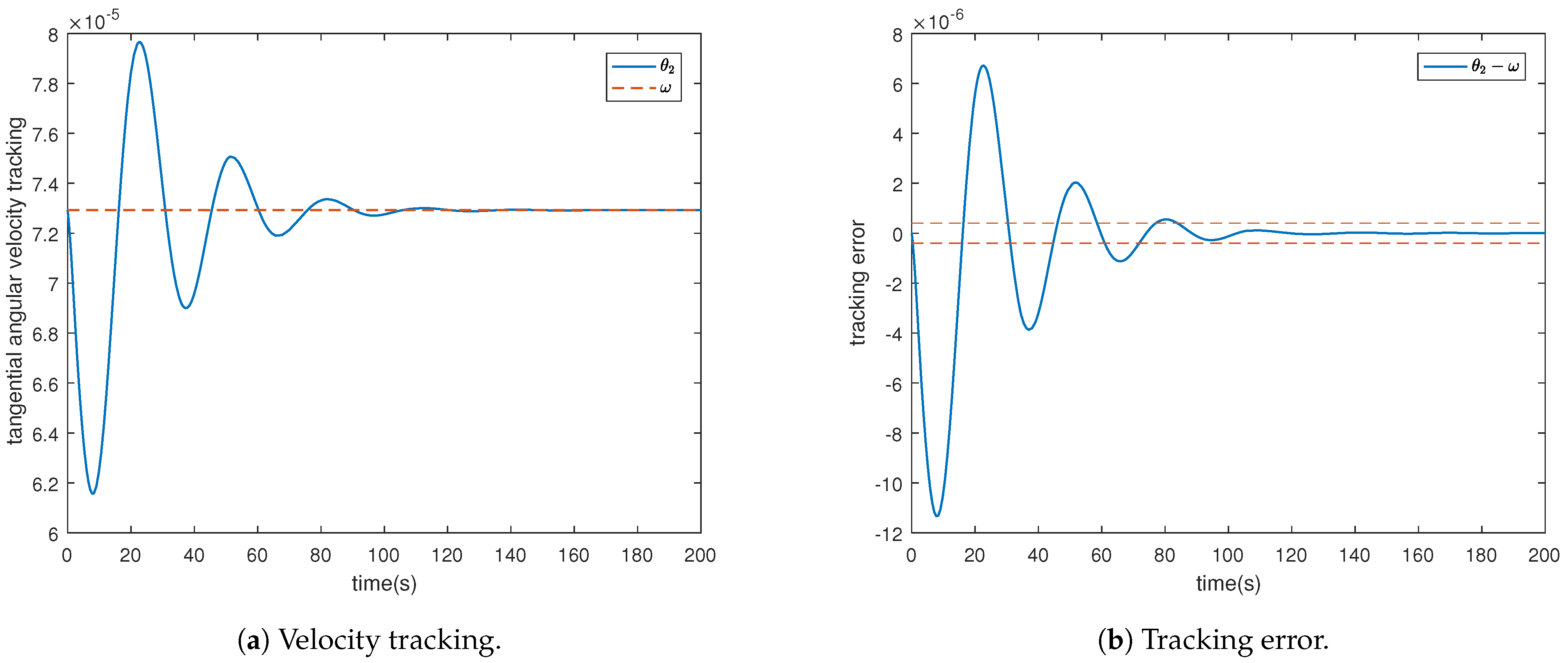
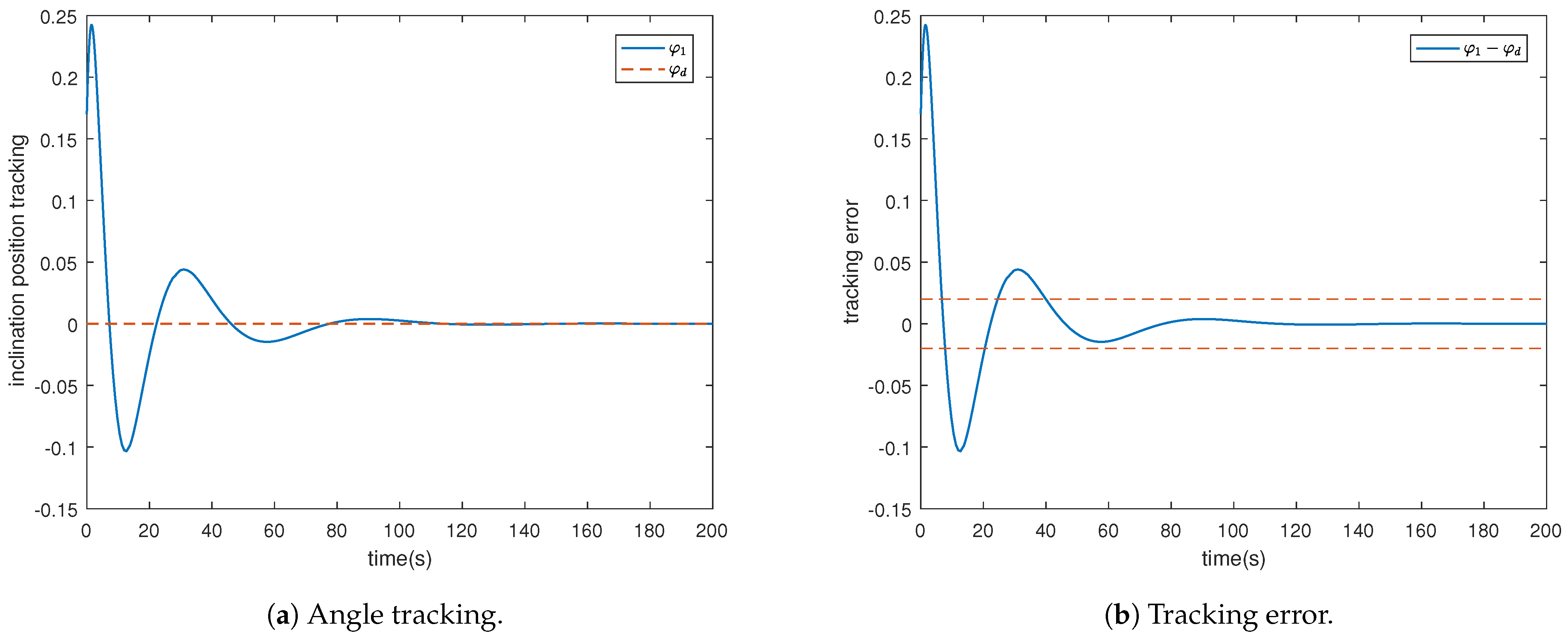
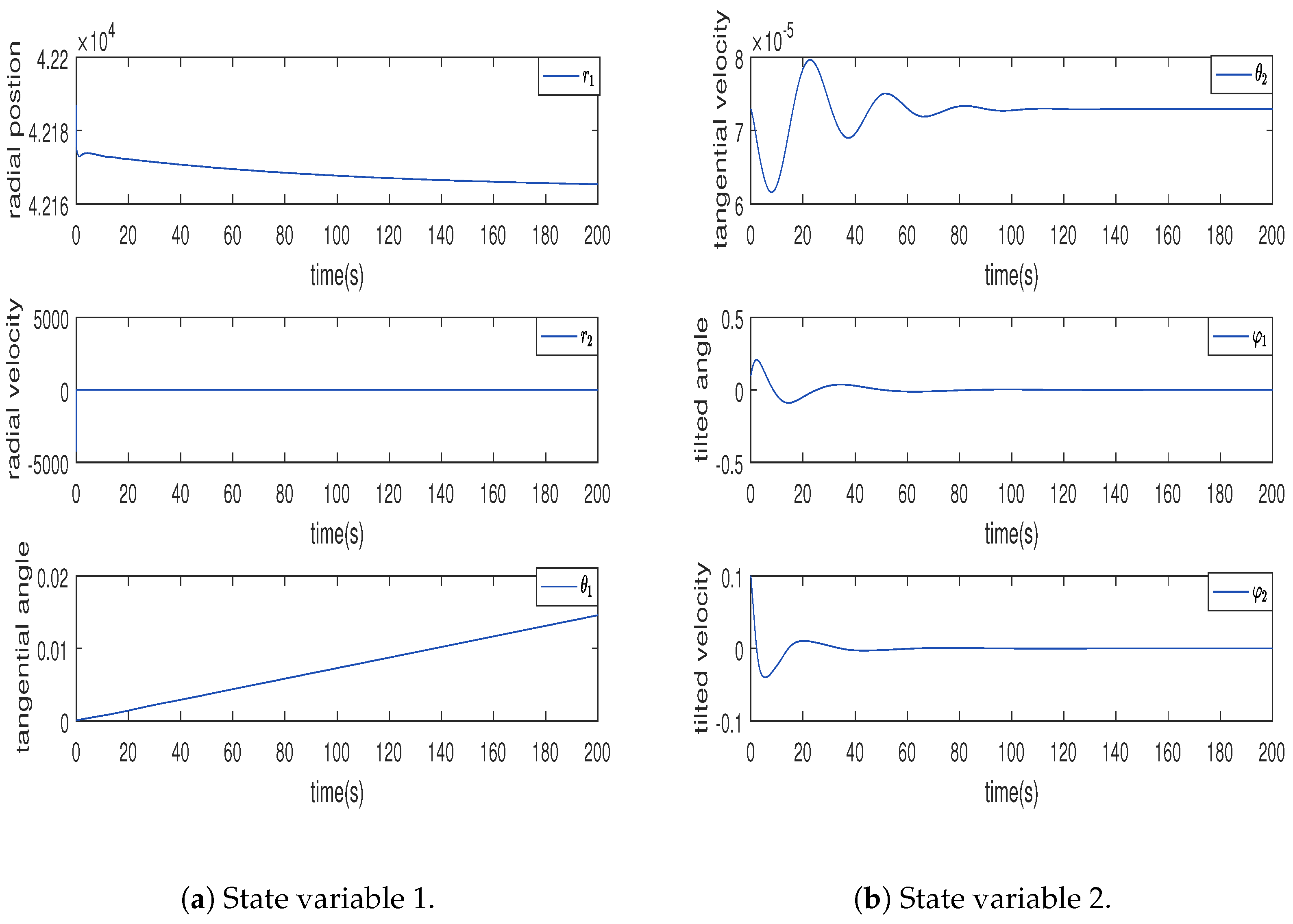
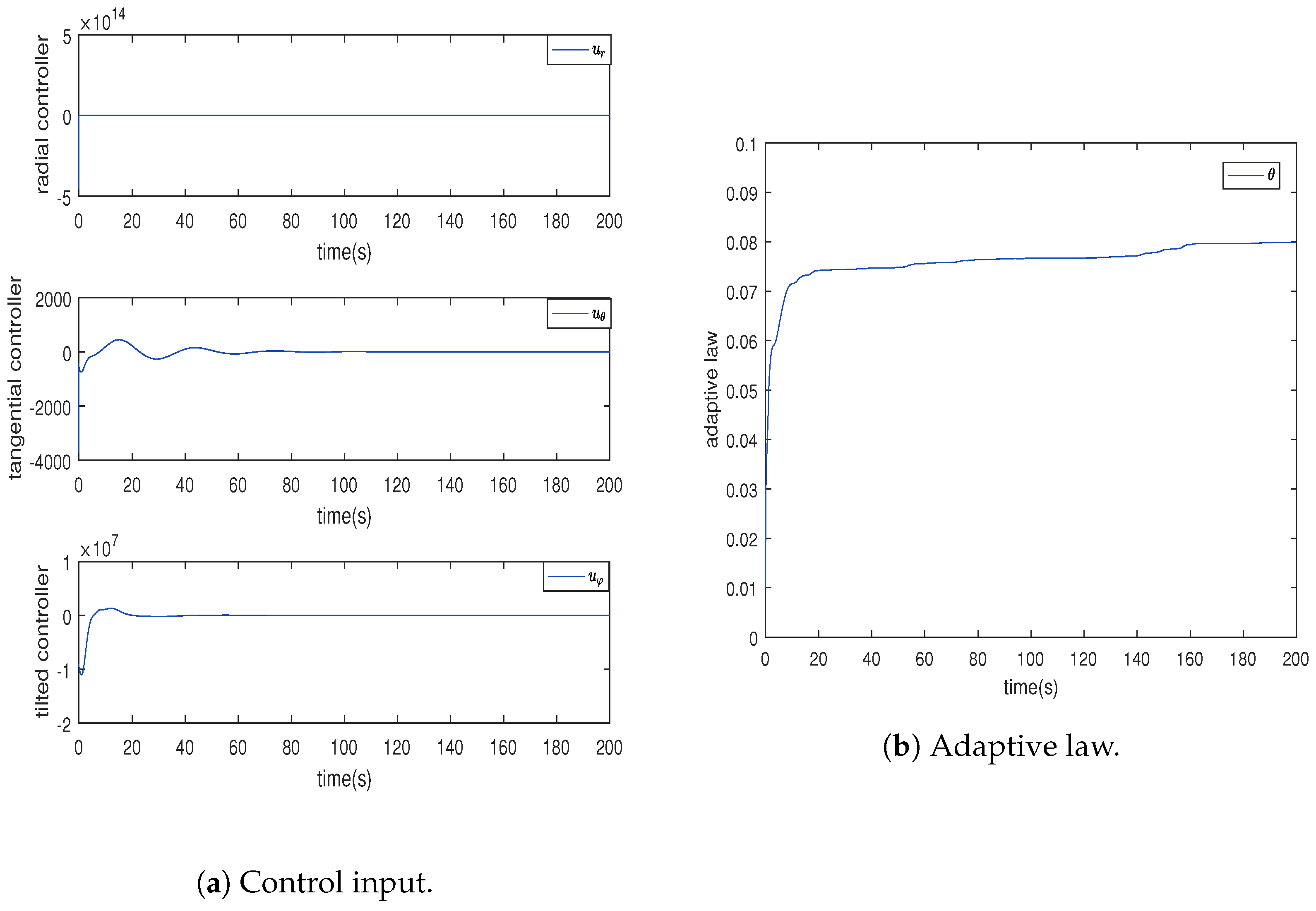
4. Simulation Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Guo, J.; Wang, Y.; Xie, X.; Sun, C. A fast satellite selection algorithm for positioning in LEO constellation. Adv. Space Res. 2023, 73, 271–285. [Google Scholar] [CrossRef]
- Awange, J.L.; Grafarend, E.W.; Paláncz, B.; Zaletnyik, P. Algebraic Geodesy and Geoinformatics; Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Zhou, S.; Xia, C.; Zhang, G. Orbit design and control for periodically revisiting multiple formation satellites. Aerosp. Sci. Technol. 2023, 135, 108199. [Google Scholar] [CrossRef]
- Nocerino, A.; Notaro, I.; Morani, G.; Poderico, M.; D’Amato, E.; Blasi, L.; Fedele, A.; Fortezza, R.; Grassi, M.; Mattei, M. Trajectory control algorithms for the de-orbiting and Re-entry of the MISTRAL satellite. Acta Astronaut. 2023, 203, 392–406. [Google Scholar] [CrossRef]
- Fan, L.; Huang, H. Coordinative coupled attitude and orbit control for satellite formation with multiple uncertainties and actuator saturation. Acta Astronaut. 2021, 181, 325–335. [Google Scholar] [CrossRef]
- Shi, G.; Zhu, Z.; Zhu, Z.H. Dynamics and control of tethered multi-satellites in elliptic orbits. Aerosp. Sci. Technol. 2019, 91, 41–48. [Google Scholar] [CrossRef]
- Asadi, H.; Oladazimi, M.; Asadi, Z.; Ambarwati, E.K. Pole Placement Controller for Circular Flying Formation Satellite System in the Inverse Square Gravitation. In Proceedings of the 2011 First International Conference on Informatics and Computational Intelligence, Pune, India, 7–8 November 2011; pp. 197–202. [Google Scholar]
- Paláncz, B. Application of Dixon resultant to satellite trajectory control by pole placement. J. Symb. Comput. 2013, 50, 79–99. [Google Scholar] [CrossRef]
- Liu, C.; Ye, D.; Shi, K.; Sun, Z. Robust high-precision attitude control for flexible spacecraft with improved mixed H2/H∞ control strategy under poles assignment constraint. Acta Astronaut. 2017, 136, 166–175. [Google Scholar] [CrossRef]
- Wei, C.; Park, S.Y.; Park, C. Optimal H∞ robust output feedback control for satellite formation in arbitrary elliptical reference orbits. Adv. Space Res. 2014, 54, 969–989. [Google Scholar] [CrossRef]
- Wei, C.; Park, S.Y. Dynamic optimal output feedback control of satellite formation reconfiguration based on an LMI approach. Aerosp. Sci. Technol. 2017, 63, 214–231. [Google Scholar] [CrossRef]
- Wood, M.; Chen, W.H. Attitude control of magnetically actuated satellites with an uneven inertia distribution. Aerosp. Sci. Technol. 2013, 25, 29–39. [Google Scholar] [CrossRef]
- Ma, Z.; Sun, G. Adaptive sliding mode control of tethered satellite deployment with input limitation. Acta Astronaut. 2016, 127, 67–75. [Google Scholar] [CrossRef]
- Navabi, M.; Hashkavaei, N.S.; Reyhanoglu, M. Satellite attitude control using optimal adaptive and fuzzy controllers. Acta Astronaut. 2023, 204, 434–442. [Google Scholar] [CrossRef]
- Das, G.; Patra, N.; Mishra, R.K. Attitude Control of a Rigid Satellite with Event-triggered Sliding Mode. IFAC-PapersOnLine 2022, 55, 346–351. [Google Scholar] [CrossRef]
- Arefkhani, H.; Sadati, S.H.; Shahravi, M. Satellite attitude control using a novel Constrained Magnetic Linear Quadratic Regulator. Control. Eng. Pract. 2020, 101, 104466. [Google Scholar] [CrossRef]
- Mammarella, M.; Lee, D.Y.; Park, H.; Capello, E.; Dentis, M.; Guglieri, G. Attitude Control of a Small Spacecraft via Tube-Based Model Predictive Control. J. Spacecr. Rocket. 2019, 56, 1662–1679. [Google Scholar] [CrossRef]
- Zhuang, H.; Sun, Q.; Chen, Z.; Zeng, X. Robust adaptive sliding mode attitude control for aircraft systems based on back-stepping method. Aerosp. Sci. Technol. 2021, 118, 107069. [Google Scholar] [CrossRef]
- Chang, W.; Li, Y.; Tong, S. Adaptive Fuzzy Backstepping Tracking Control for Flexible Robotic Manipulator. IEEE/CAA J. Autom. Sin. 2021, 8, 1923–1930. [Google Scholar] [CrossRef]
- Ling, S.; Wang, H.; Liu, P.X. Adaptive Fuzzy Tracking Control of Flexible-Joint Robots Based on Command Filtering. IEEE Trans. Ind. Electron. 2020, 67, 4046–4055. [Google Scholar] [CrossRef]
- Li, Y.; Tong, S.; Li, T. Adaptive fuzzy output feedback control for a single-link flexible robot manipulator driven DC motor via backstepping. Nonlinear Anal. Real. World Appl. 2013, 14, 483–494. [Google Scholar] [CrossRef]
- Wang, D.; Huang, J. Adaptive neural network control for a class of uncertain nonlinear systems in pure-feedback form. Automatica 2002, 38, 1365–1372. [Google Scholar] [CrossRef]
- Lu, K.; Liu, Z.; Lai, G.; Chen, C.L.P.; Zhang, Y. Adaptive Consensus Tracking Control of Uncertain Nonlinear Multiagent Systems With Predefined Accuracy. IEEE Trans. Cybern. 2021, 51, 405–415. [Google Scholar] [CrossRef] [PubMed]
- Ling, S.; Wang, H.; Liu, P.X. Adaptive fuzzy dynamic surface control of flexible-joint robot systems with input saturation. IEEE/CAA J. Autom. Sin. 2019, 6, 97–107. [Google Scholar] [CrossRef]
- Diao, S.; Sun, W.; Su, S.F.; Xia, J. Adaptive Fuzzy Event-Triggered Control for Single-Link Flexible-Joint Robots With Actuator Failures. IEEE Trans. Cybern. 2022, 52, 7231–7241. [Google Scholar] [CrossRef]
- Sun, W.; Su, S.F.; Xia, J.; Nguyen, V.T. Adaptive Fuzzy Tracking Control of Flexible-Joint Robots with Full-State Constraints. IEEE Trans. Syst. Man Cybern. Syst. 2019, 49, 2201–2209. [Google Scholar] [CrossRef]
- Ma, H.; Zhou, Q.; Li, H.; Lu, R. Adaptive Prescribed Performance Control of a Flexible-Joint Robotic Manipulator with Dynamic Uncertainties. IEEE Trans. Cybern. 2022, 52, 12905–12915. [Google Scholar] [CrossRef] [PubMed]
- Chen, B.; Liu, X.; Liu, K.; Lin, C. Direct adaptive fuzzy control of nonlinear strict-feedback systems. Automatica 2009, 45, 1530–1535. [Google Scholar] [CrossRef]
- Lai, G.; Zhang, Y.; Liu, Z.; Wang, J.; Chen, K.; Chen, C.L.P. Direct Adaptive Fuzzy Control Scheme with Guaranteed Tracking Performances for Uncertain Canonical Nonlinear Systems. IEEE Trans. Fuzzy Syst. 2022, 30, 818–829. [Google Scholar] [CrossRef]
- Brockett, R.W. Finite Dimensional Linear Systems; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 2015. [Google Scholar]
- Lai, G.; Zhang, Y.; Liu, Z.; Chen, C.L.P. Indirect Adaptive Fuzzy Control Design with Guaranteed Tracking Error Performance For Uncertain Canonical Nonlinear Systems. IEEE Trans. Fuzzy Syst. 2019, 27, 1139–1150. [Google Scholar] [CrossRef]
- Zhonggui, C.; Xiangjun, W. General Design of the Third Generation BeiDou Navigation Satellite System. J. Nanjing Univ. Aeronaut. Astronaut. 2020, 12, 836–839. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, W.; Zou, S.; Li, L.; Huang, K.; Lai, G. Direct Adaptive Fuzzy Control with Prescribed Tracking Accuracy for Orbit Adjustment of Satellites. Actuators 2024, 13, 19. https://doi.org/10.3390/act13010019
Yang W, Zou S, Li L, Huang K, Lai G. Direct Adaptive Fuzzy Control with Prescribed Tracking Accuracy for Orbit Adjustment of Satellites. Actuators. 2024; 13(1):19. https://doi.org/10.3390/act13010019
Chicago/Turabian StyleYang, Weijun, Shizhuan Zou, Liang Li, Kai Huang, and Guanyu Lai. 2024. "Direct Adaptive Fuzzy Control with Prescribed Tracking Accuracy for Orbit Adjustment of Satellites" Actuators 13, no. 1: 19. https://doi.org/10.3390/act13010019
APA StyleYang, W., Zou, S., Li, L., Huang, K., & Lai, G. (2024). Direct Adaptive Fuzzy Control with Prescribed Tracking Accuracy for Orbit Adjustment of Satellites. Actuators, 13(1), 19. https://doi.org/10.3390/act13010019