

A Singular Perturbation Theory-Based Composite Control Design for a Pump-Controlled Hydraulic Actuator with Position Tracking Error Constraint

Abstract
1. Introduction
- (1)
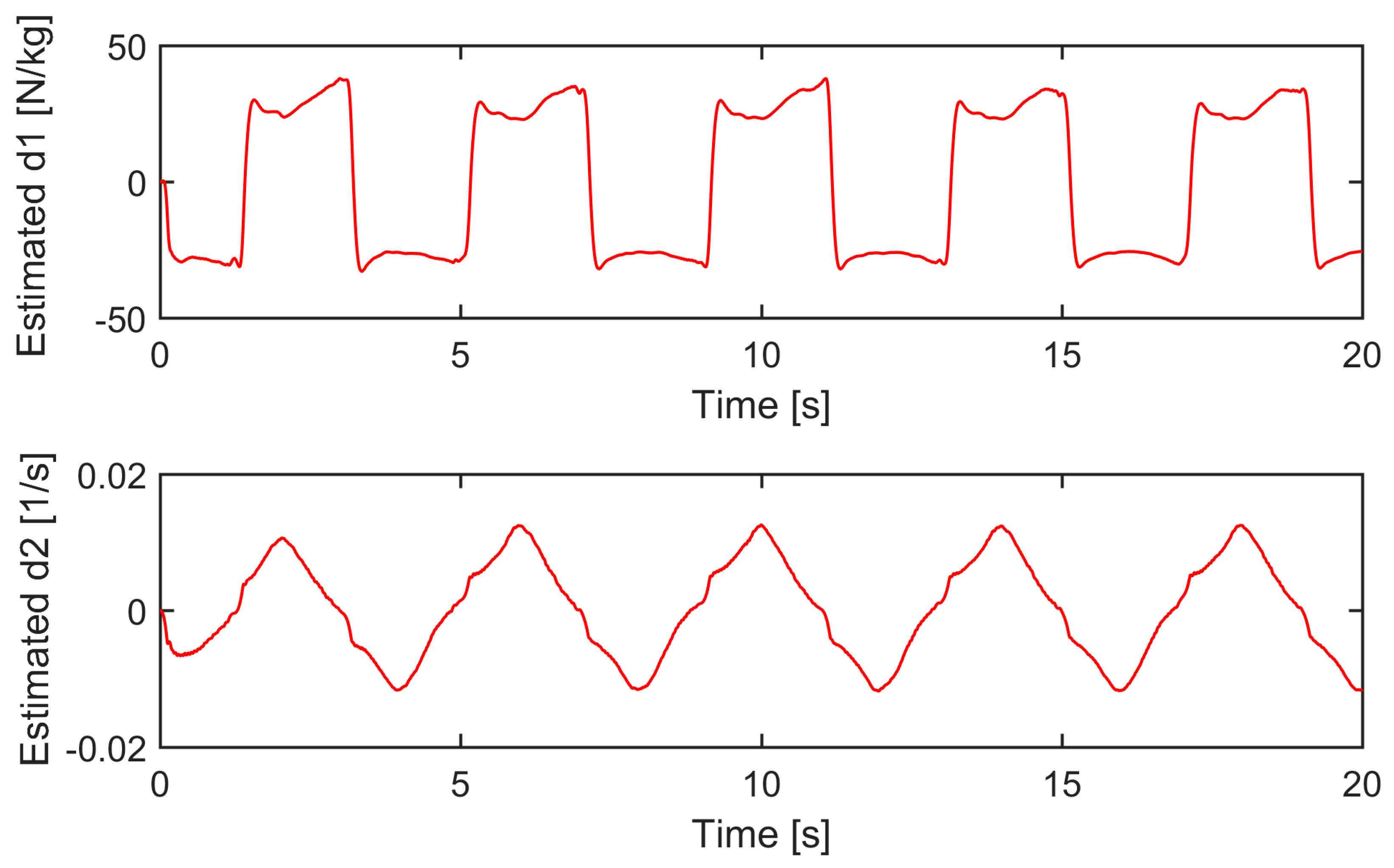
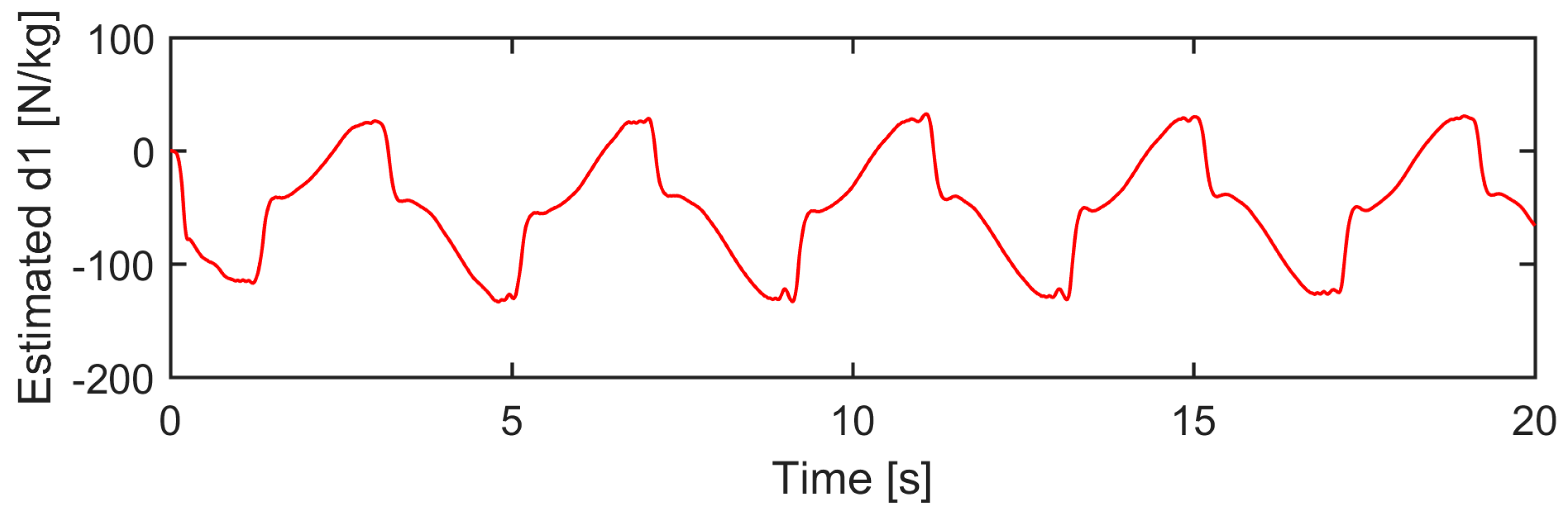
- Position tracking error constraint is investigated for a PHA subject to uncertainties. Two DOBs are incorporated to provide estimates of the matched and mismatched uncertainties.
- (2)
- (3)
- Compared with the BLF-based control [27,28,29], the proposed sliding surface-like error variable transforms the position tracking error constraint of the third-order PHA into the output constraint of a first-order error subsystem and the stabilizing of the first-order hydraulic subsystem. Consequently, a composite controller can be easily designed without the use of the backstepping technique.
- (4)
- The proposed control approach has a simple control structure, low computational burden, and satisfactory control accuracy, which makes it promising in industrial applications.
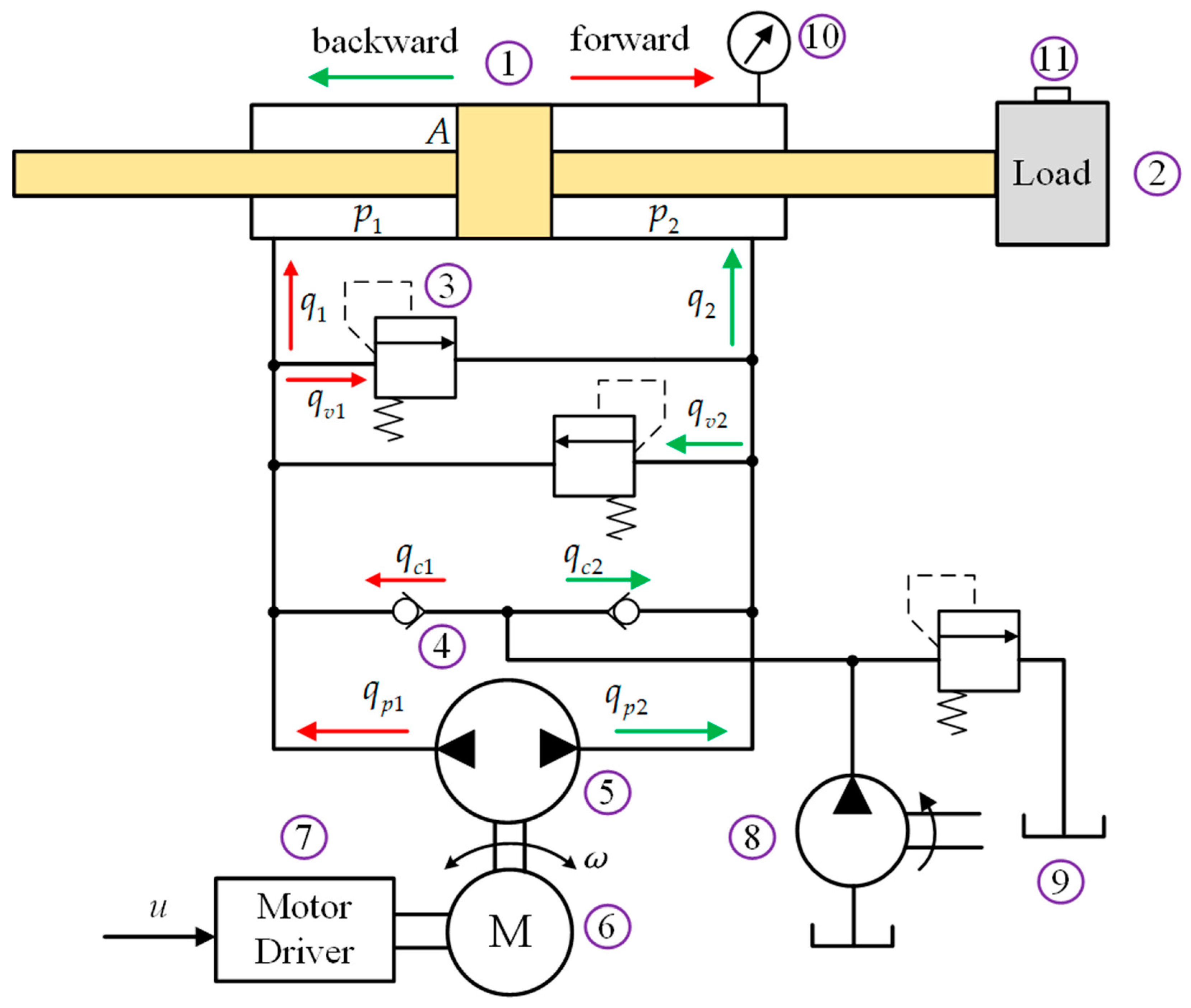
2. System Modeling
- (1)
- The position of the piston rod tracks a given reference trajectory within an expected range, i.e.,:where yd is a given reference trajectory and kb is a prescribed bound.
- (2)
- A satisfactory final position tracking error can be obtained.
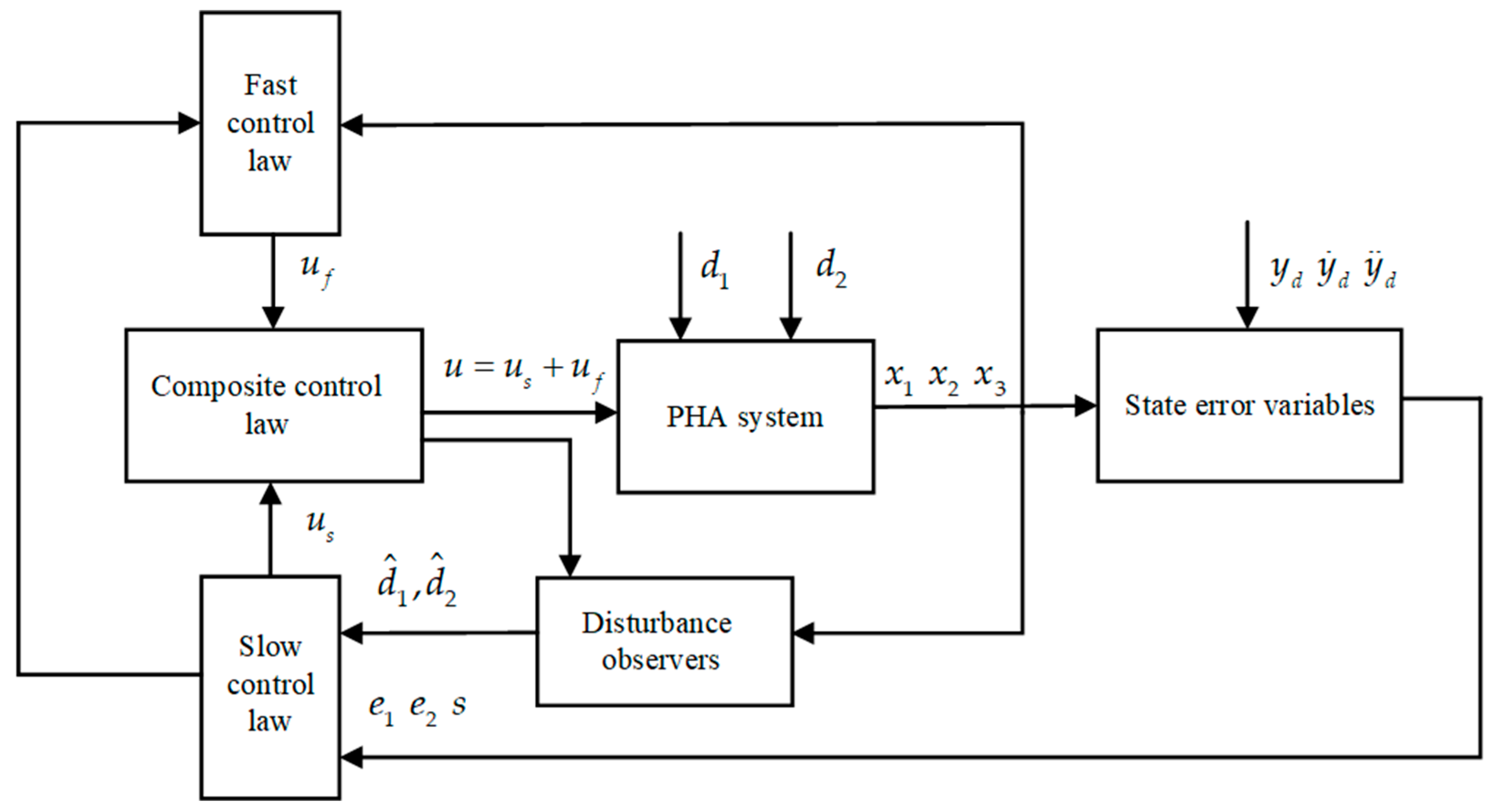
3. Singular Perturbation Theory-Based Composite Control Design
3.1. Design of the DOBs
3.2. Singular Perturbation Theory-Based Composite Controller Design
4. Closed-Loop System Stability Analysis via Singular Perturbation Theory
- (1)
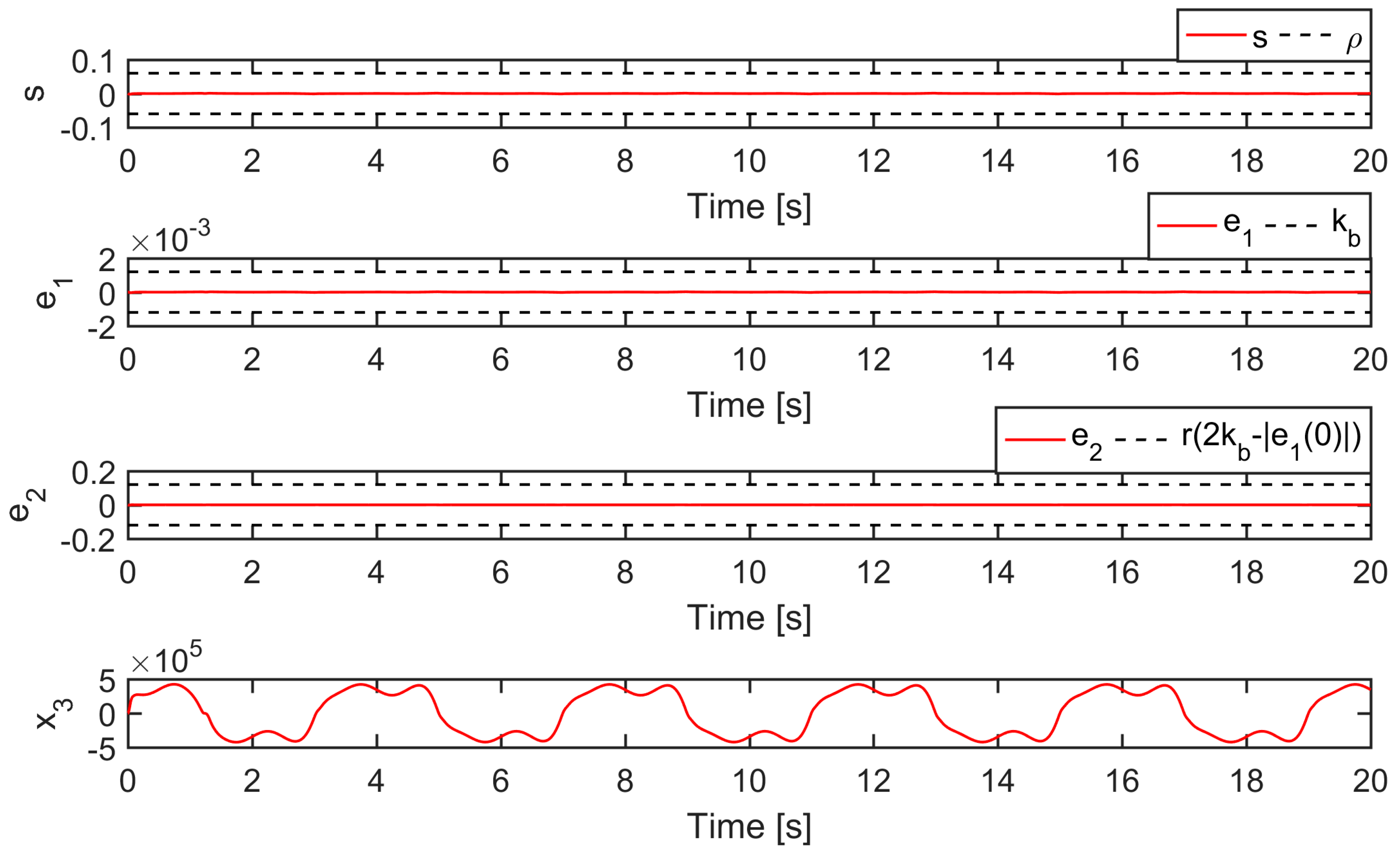
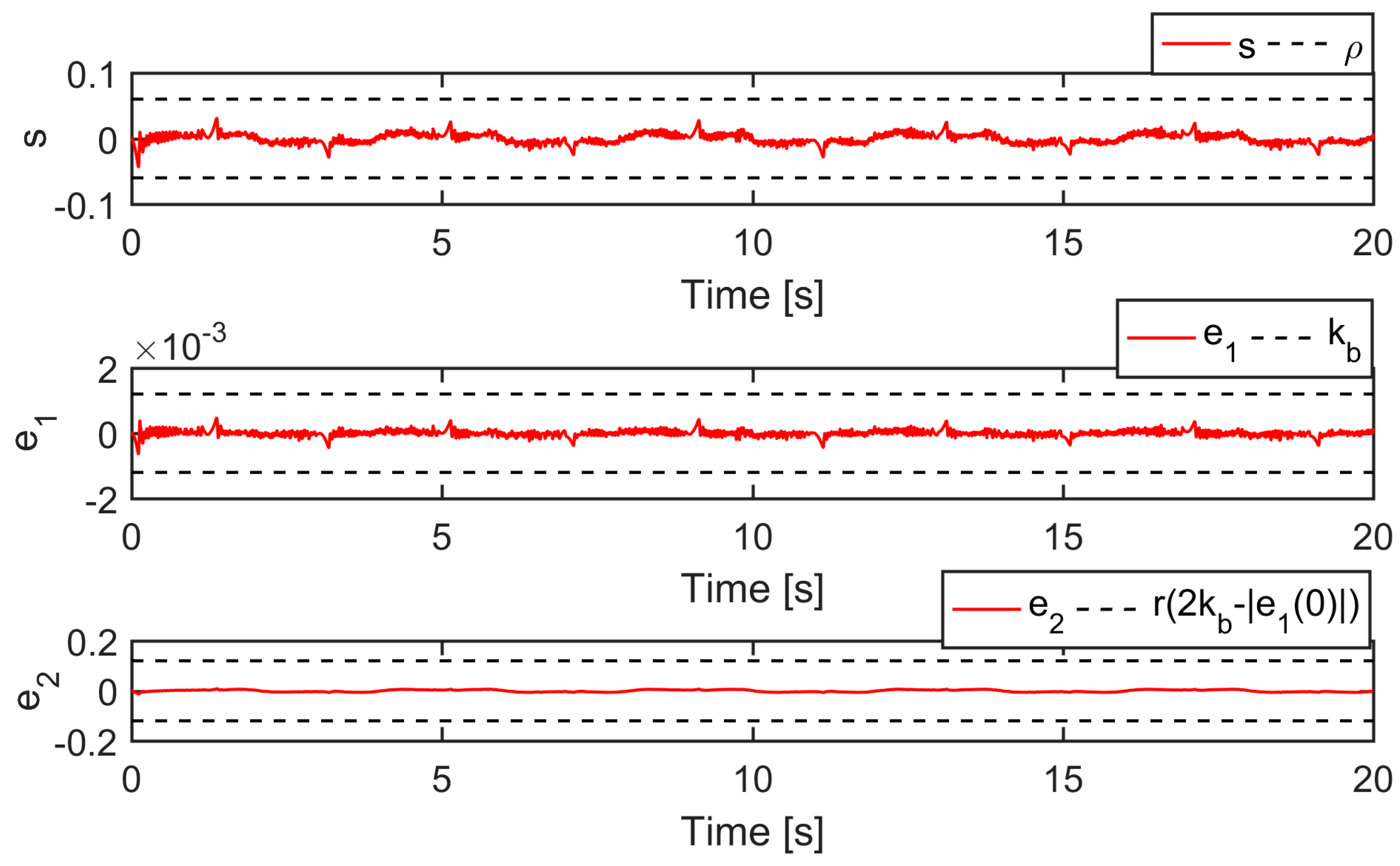
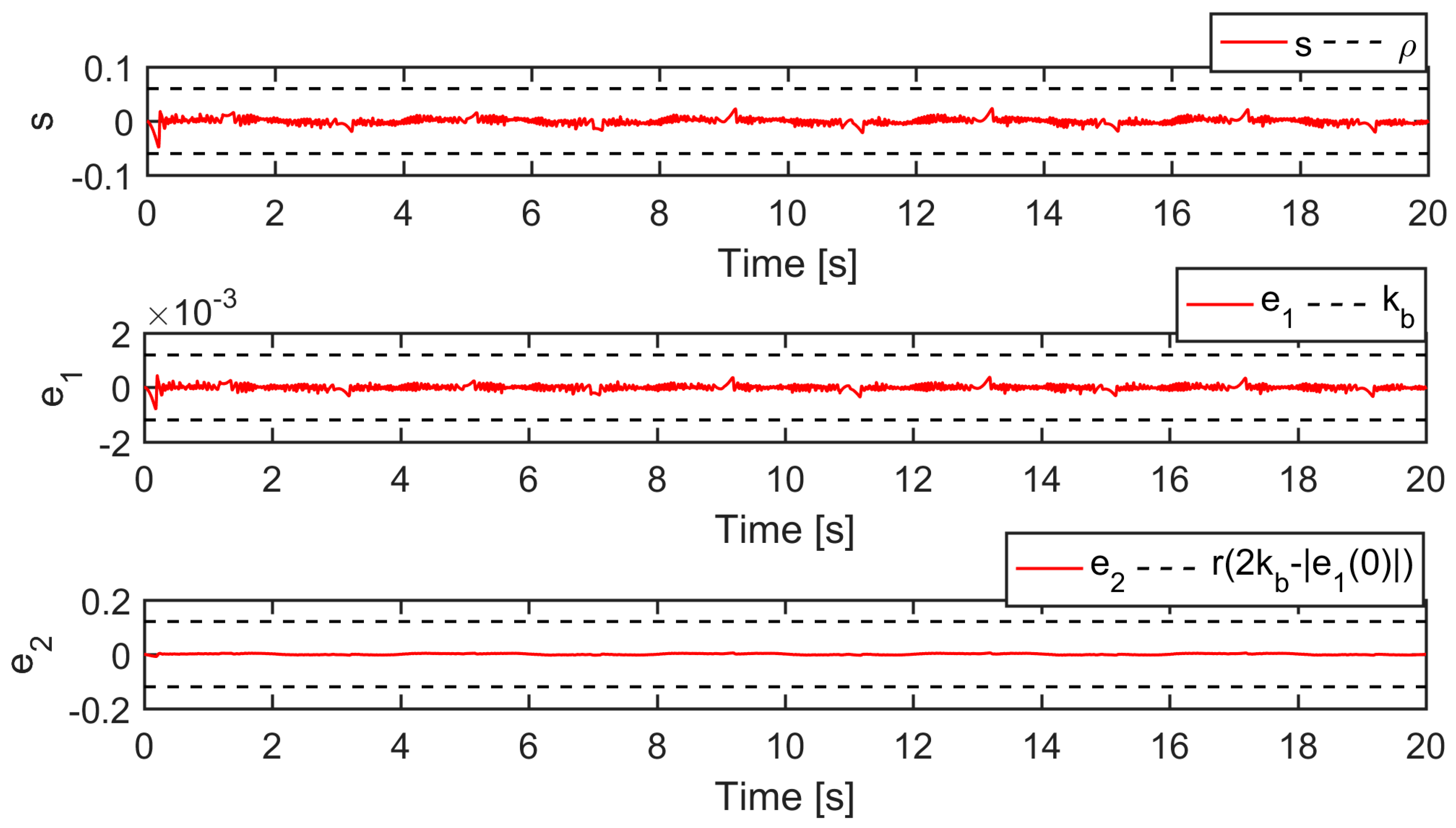
- All closed-loop system signals are bounded, and the prescribed boundary of the position tracking error is never violated;
- (2)
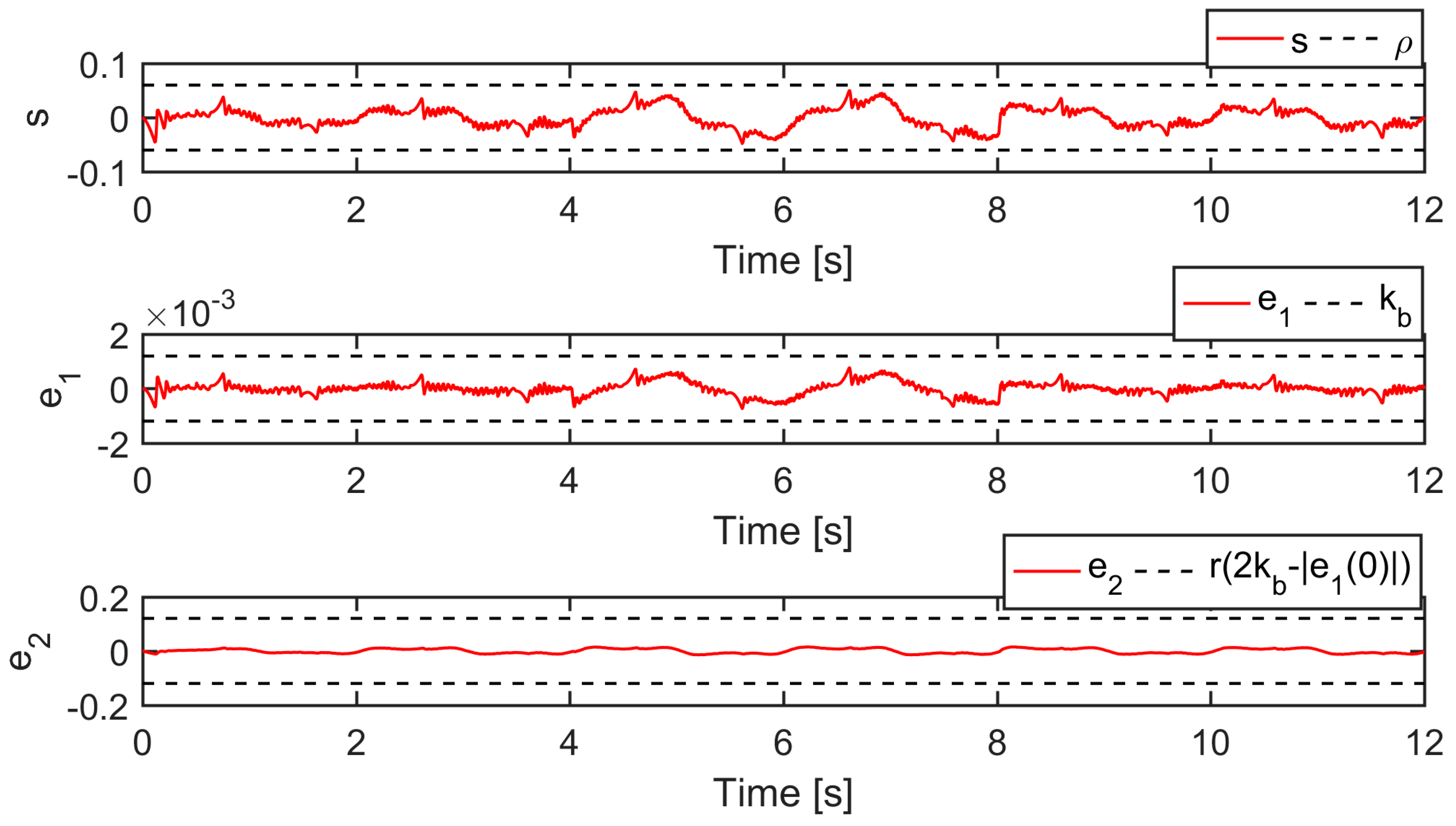
- The position tracking error finally converges to a region around zero, which can be arbitrarily small by an appropriate selection of the control parameters.
- (1)
- Choose k1, k2, h1, and h2 such that , and then we have on ,, which means that Ωv is a positive invariant set. Therefore, any trajectories starting from will remain within Ωv. Since is bounded, its components V(s) and W(η) are also bounded, and it can be concluded that η is bounded and , . It follows from Lemma 1 that e1 and e2 are bounded by kb and r(2kb − |e1(0)|), which means that the position tracking error constraint is satisfied. According to Assumptions 1–2, it can be easily inferred from (17) and (35) that x1, x2, , and are bounded. Thus, it can be concluded from (45) that us is also bounded. Consequently, the boundedness of is guaranteed from (32), and is also bounded. Additionally, it is known from (46) that uf is bounded. Finally, the boundedness of u = us + uf is verified.Therefore, all closed-loop system signals are bounded, and the prescribed boundary of the position tracking error is never violated.
- (2)
- It follows from (66) that:
5. Simulation and Experimental Validation
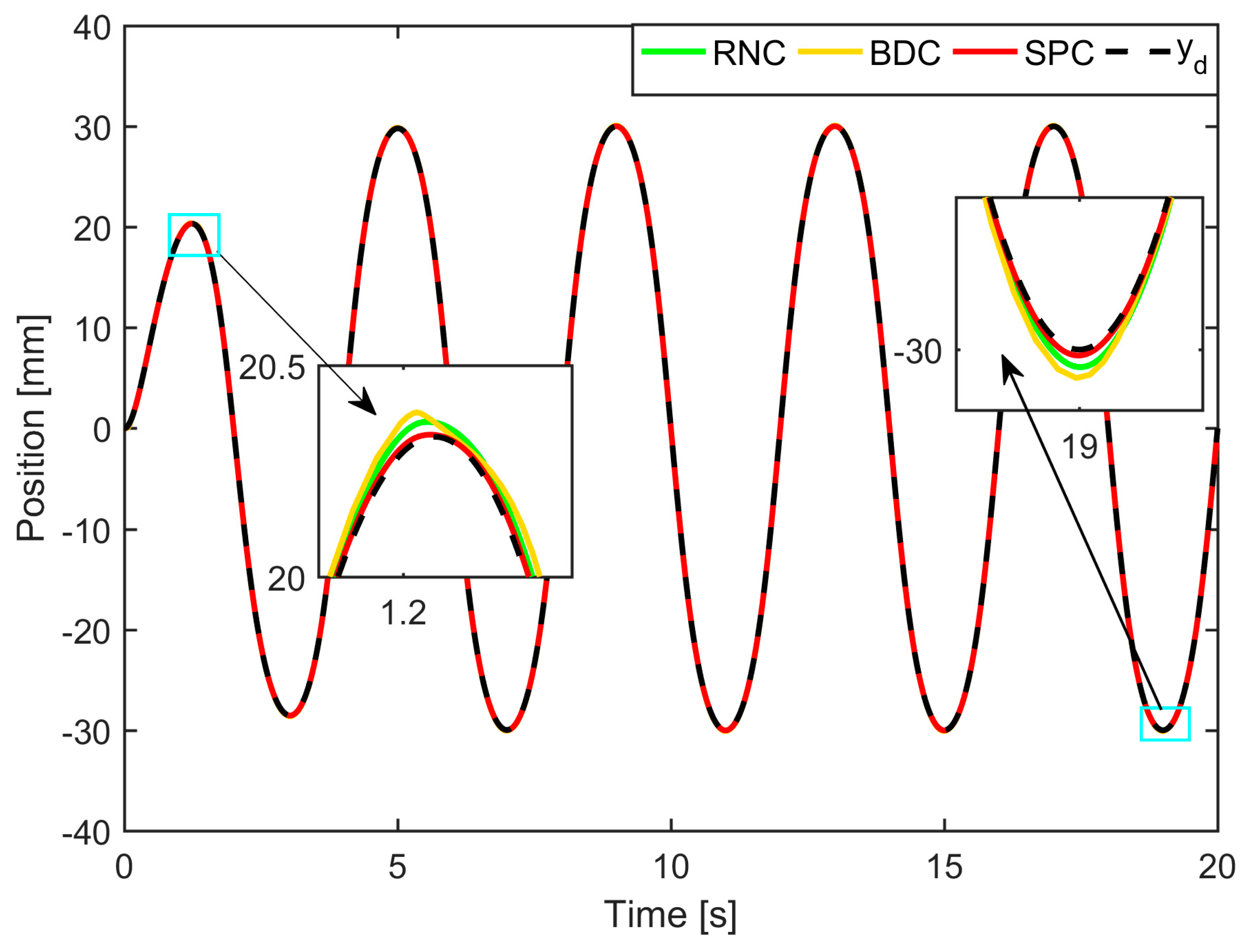
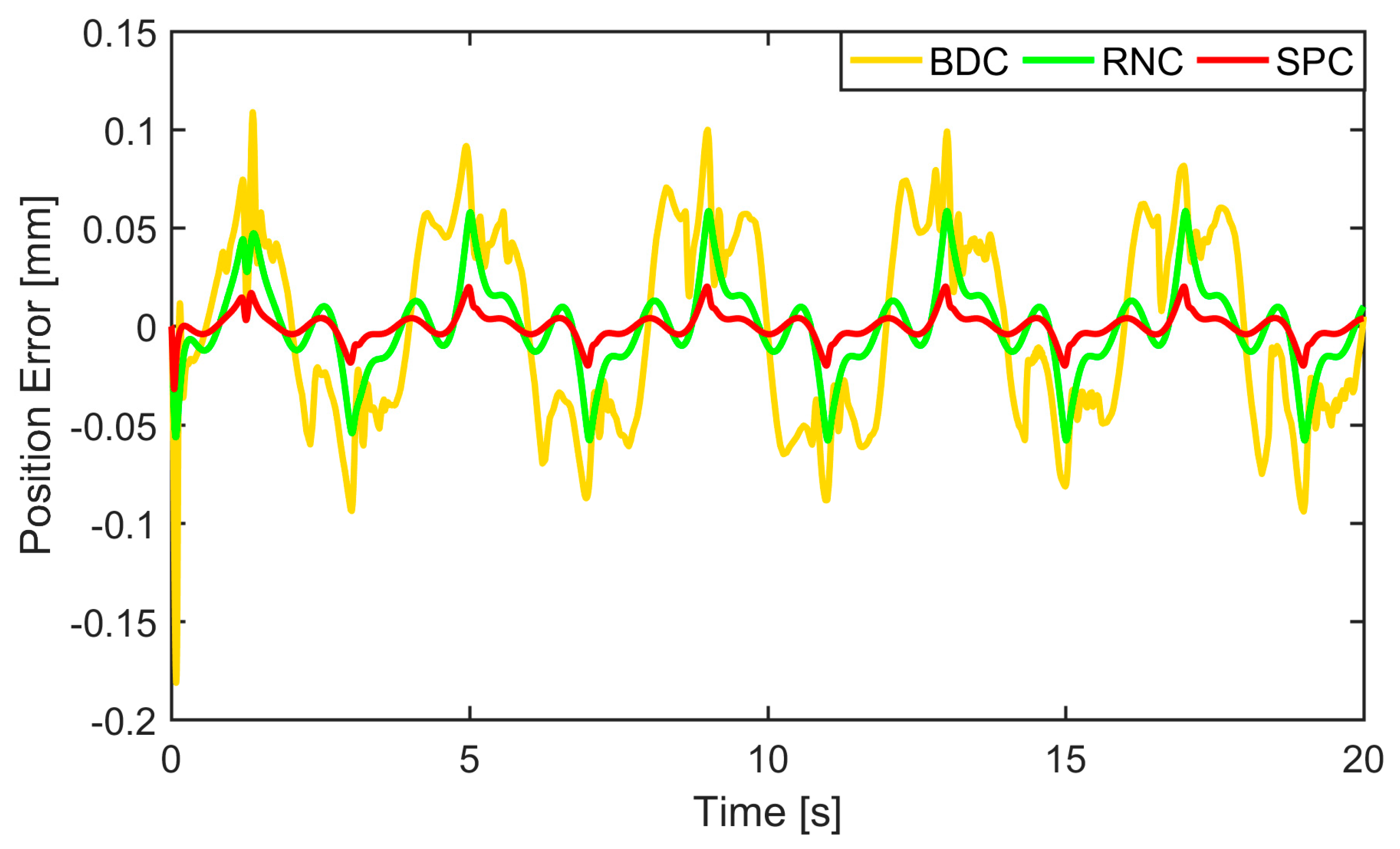
5.1. Numerical Simulation
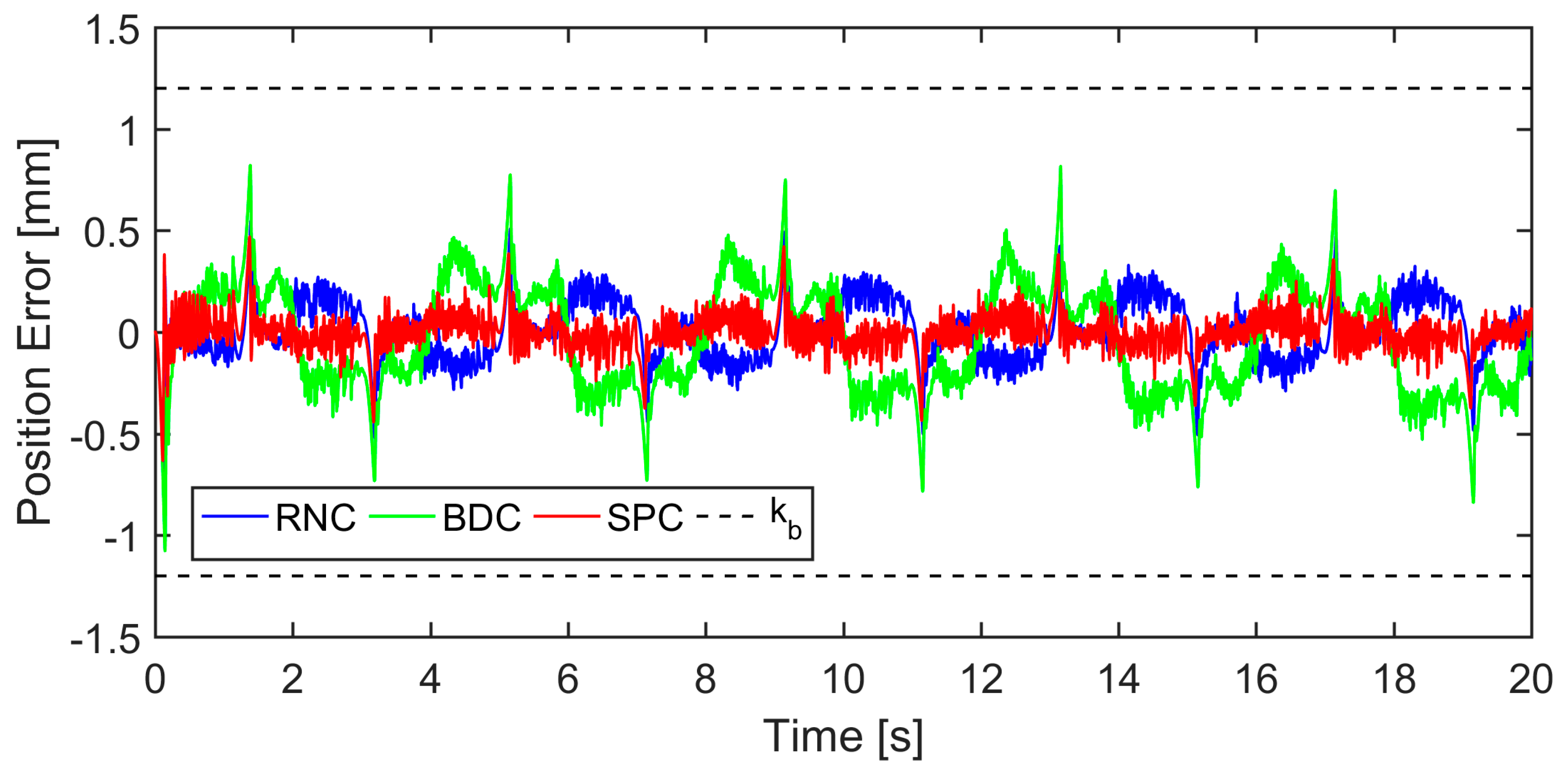
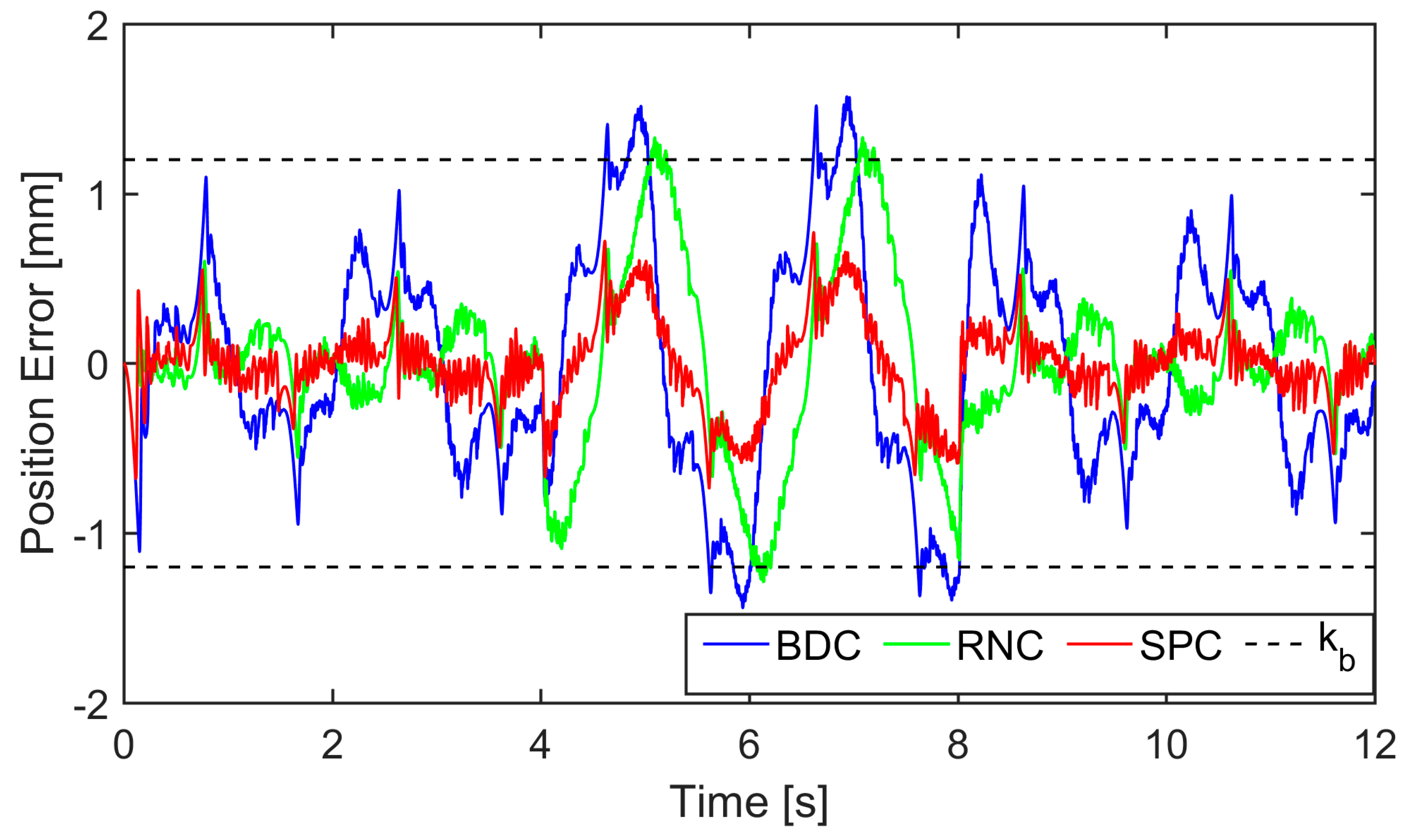
- (1)
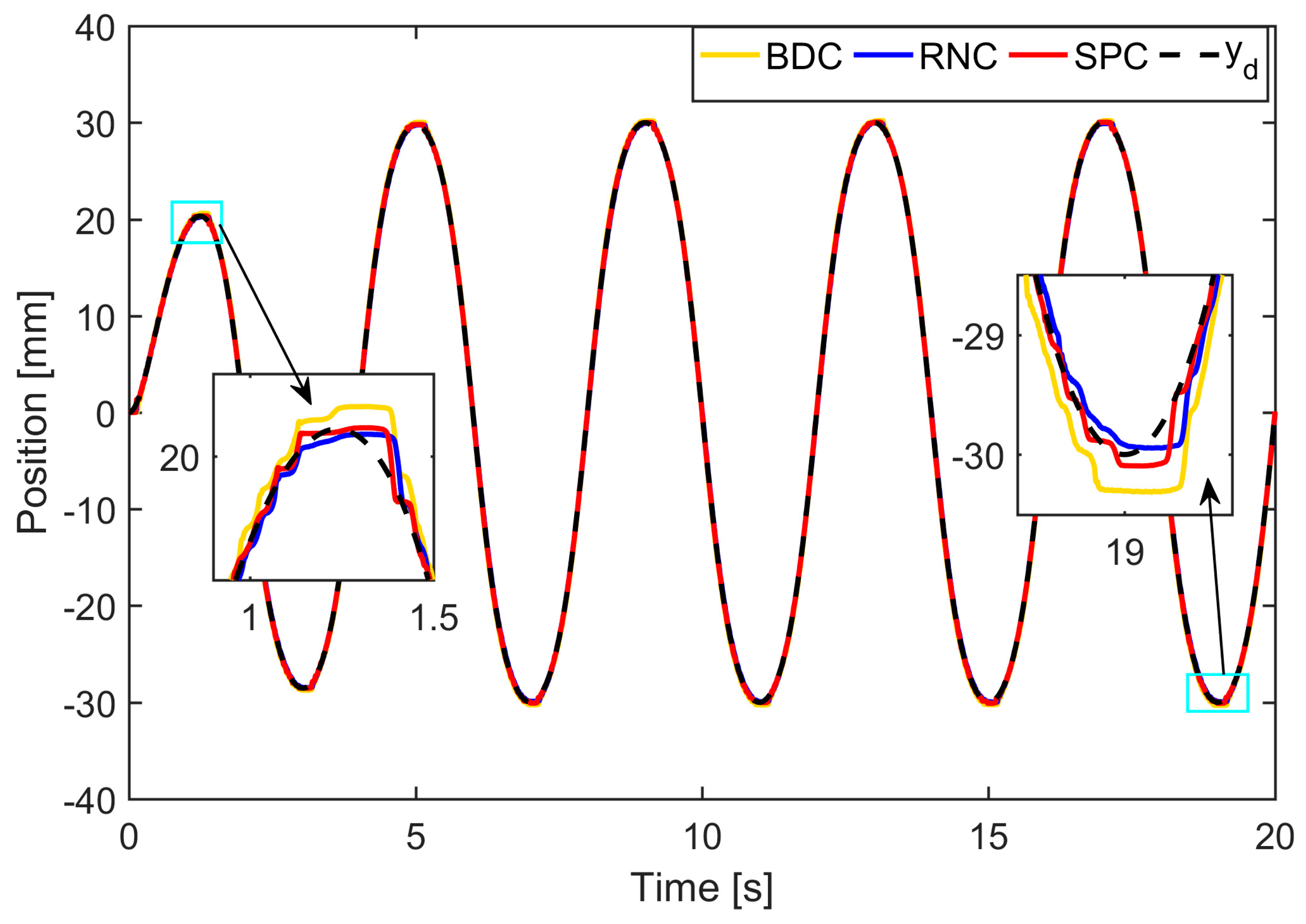
- SPC: This is the proposed singular perturbation theory-based composite controller with the sliding surface-like error variable. The controller parameters of SPC are chosen as k1 = 105, k2 = 5 × 10−10, h1 = 5 × 105, h2 = 106, ρ = 0.06, and r = 50.
- (2)
- RNC: This is a reduce-order model-based nonlinear controller proposed in [23]. It is constructed as:
- (3)
- BDC: This is a backstepping controller with dynamic surface control. The structure and control parameters of BDC were shown as follows:where and and were obtained from (16). The control parameters were selected as γ1 = 50, γ2 = 1000, γ3 = 30, and τ1 = τ2 = 0.015. All other parameters are chosen the same as the proposed approach to form a fair comparison.
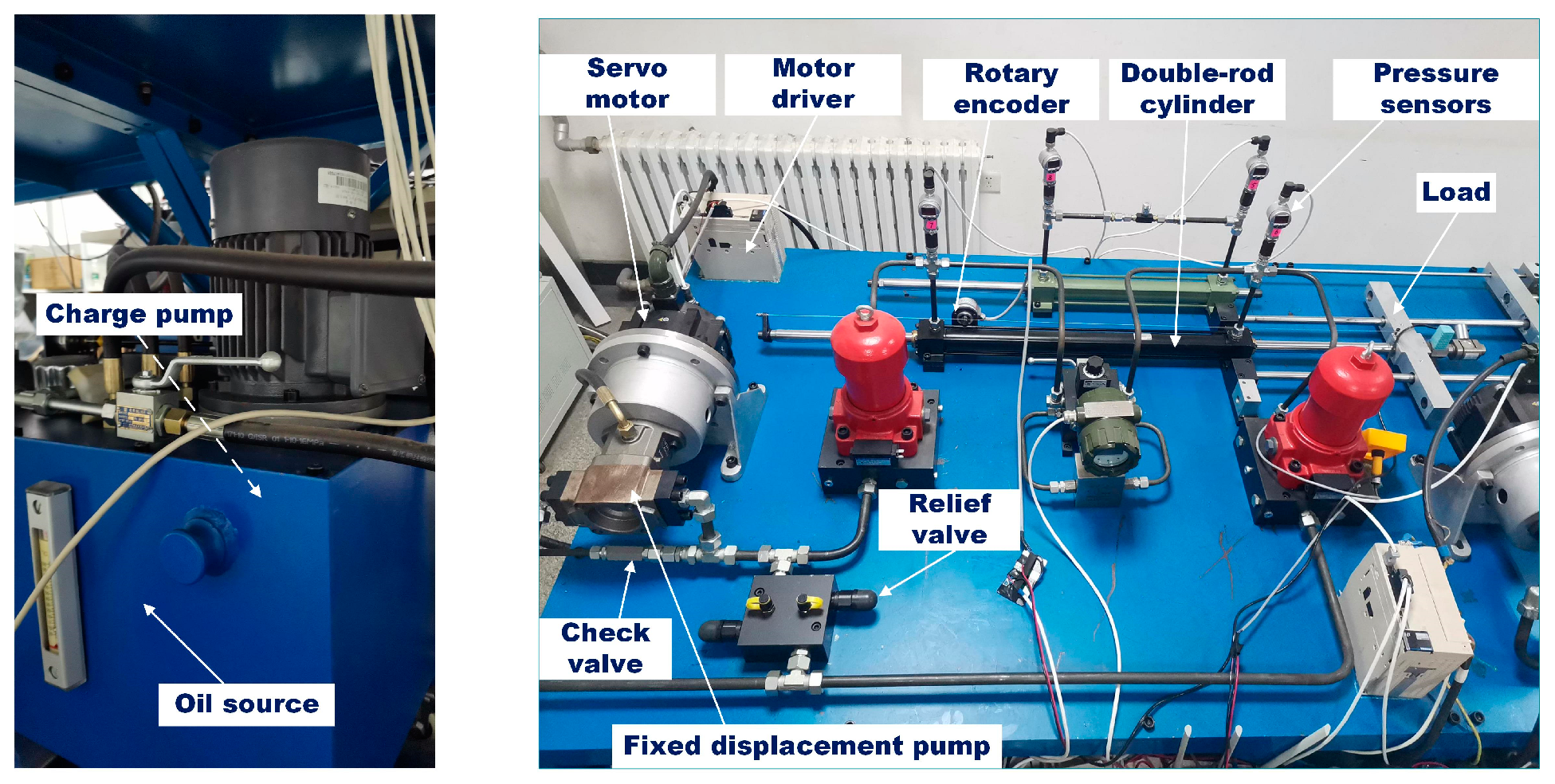
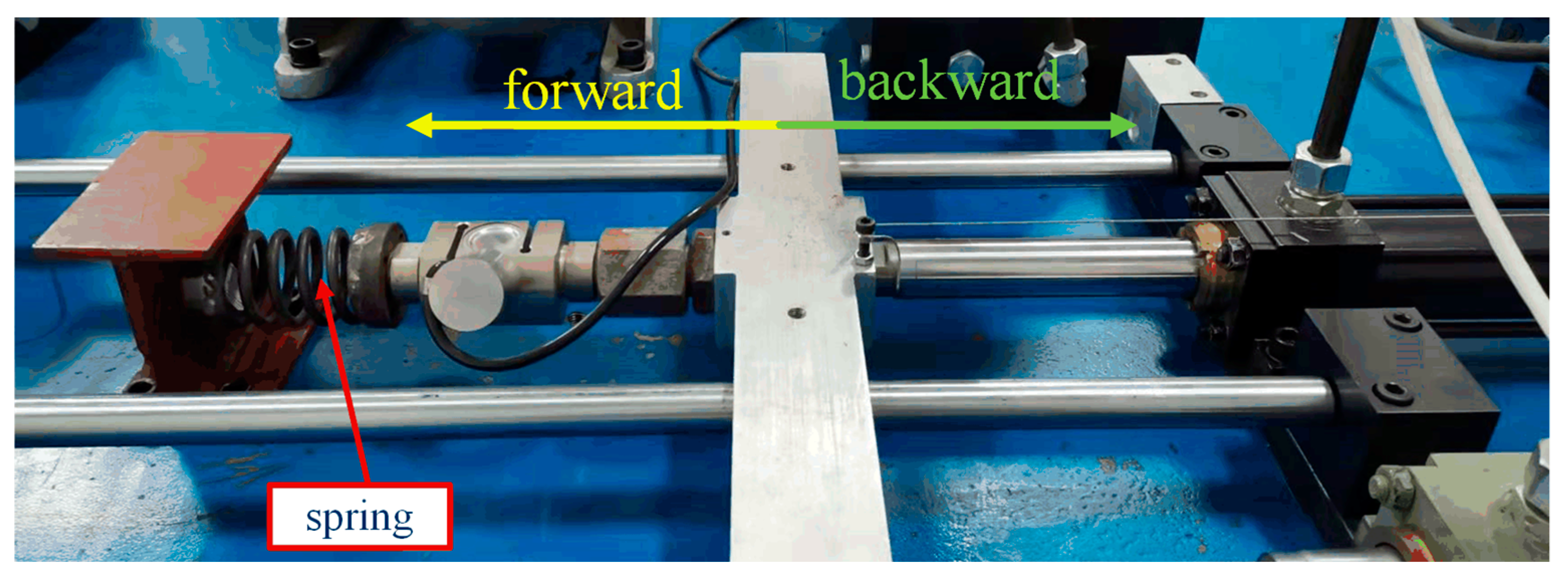
5.2. Experimental Setup
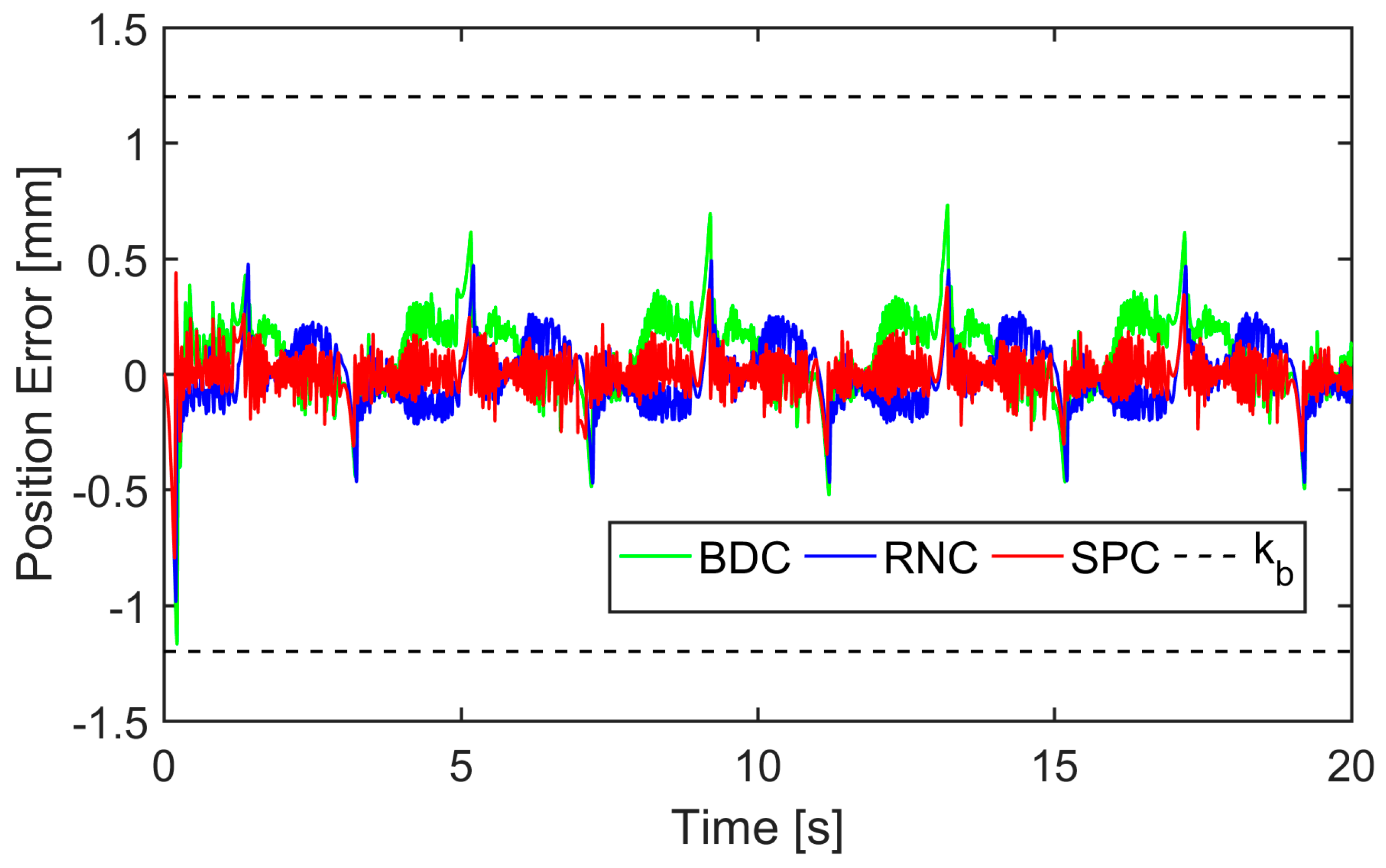
5.3. Experimental Results
- (1)
- The maximum absolute error:
- (2)
- The integral of the squared errors:
- (3)
- The integral of time multiplied by the absolute errors:where N represents the number of the sampled data.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Shang, Y.; Li, X.; Qian, H.; Wu, S.; Pan, Q.; Huang, L.; Jiao, Z. A Novel Electro Hydrostatic Actuator System with Energy Recovery Module for More Electric Aircraft. IEEE Trans. Ind. Electron. 2020, 67, 2991–2999. [Google Scholar] [CrossRef]
- Chen, S.-H.; Fu, L.-C. Observer-Based Backstepping Control of a 6-Dof Parallel Hydraulic Manipulator. Control Eng. Pract. 2015, 36, 100–112. [Google Scholar] [CrossRef]
- Yu, T.; Plummer, A.R.; Iravani, P.; Bhatti, J.; Zahedi, S.; Moser, D. The Design, Control, and Testing of an Integrated Electrohydrostatic Powered Ankle Prosthesis. IEEE/ASME Trans. Mechatron. 2019, 24, 1011–1022. [Google Scholar] [CrossRef]
- Imam, A.; Tolba, M.; Sepehri, N. A Comparative Study of Two Common Pump-Controlled Hydraulic Circuits for Single-Rod Actuators. Actuators 2023, 12, 193. [Google Scholar] [CrossRef]
- Alle, N.; Hiremath, S.S.; Makaram, S.; Subramaniam, K.; Talukdar, A. Review on Electro Hydrostatic Actuator for Flight Control. Int. J. Fluid Power 2016, 17, 125–145. [Google Scholar] [CrossRef]
- Ho, T.H.; Le, T.D. Development and Evaluation of Energy-Saving Electro-Hydraulic Actuator. Actuators 2021, 10, 302. [Google Scholar] [CrossRef]
- Bakhshande, F.; Bach, R.; Söffker, D. Robust Control of a Hydraulic Cylinder Using an Observer-Based Sliding Mode Control: Theoretical Development and Experimental Validation. Control Eng. Pract. 2020, 95, 104272. [Google Scholar] [CrossRef]
- Barchi, D.; Macchelli, A.; Bosi, G.; Marconi, L.; Foschi, D.; Mezzetti, M. Design of a Robust Adaptive Controller for a Hydraulic Press and Experimental Validation. IEEE Trans. Control Syst. Technol. 2021, 29, 2049–2064. [Google Scholar] [CrossRef]
- Yao, Z.; Yao, J.; Sun, W. Adaptive RISE Control of Hydraulic Systems with Multilayer Neural-Networks. IEEE Trans. Ind. Electron. 2019, 66, 8638–8647. [Google Scholar] [CrossRef]
- Chen, W.-H.; Ballance, D.J.; Gawthrop, P.J.; O’Reilly, J. A Nonlinear Disturbance Observer for Robotic Manipulators. IEEE Trans. Ind. Electron. 2000, 47, 932–938. [Google Scholar] [CrossRef]
- Han, J. From PID to Active Disturbance Rejection Control. IEEE Trans. Ind. Electron. 2009, 56, 900–906. [Google Scholar] [CrossRef]
- Liu, K.; Wang, R. Antisaturation Command Filtered Backstepping Control-Based Disturbance Rejection for a Quadarotor UAV. IEEE Trans. Circuits Syst. II 2021, 68, 3577–3581. [Google Scholar] [CrossRef]
- Liu, K.; Wang, R.; Zheng, S.; Dong, S.; Sun, G. Fixed-Time Disturbance Observer-Based Robust Fault-Tolerant Tracking Control for Uncertain Quadrotor UAV Subject to Input Delay. Nonlinear Dyn. 2022, 107, 2363–2390. [Google Scholar] [CrossRef]
- Nguyen, M.H.; Ahn, K.K. Output Feedback Robust Tracking Control for a Variable-Speed Pump-Controlled Hydraulic System Subject to Mismatched Uncertainties. Mathematics 2023, 11, 1783. [Google Scholar] [CrossRef]
- Liu, K.; Wang, X.; Wang, R.; Sun, G.; Wang, X. Antisaturation Finite-Time Attitude Tracking Control Based Observer for a Quadrotor. IEEE Trans. Circuits Syst. II 2021, 68, 2047–2051. [Google Scholar] [CrossRef]
- Nguyen, M.H.; Dao, H.V.; Ahn, K.K. Extended Sliding Mode Observer-based High-accuracy Motion Control for Uncertain Electro-hydraulic Systems. Int. J. Robust Nonlinear 2023, 33, 1351–1370. [Google Scholar] [CrossRef]
- Tee, K.P.; Ge, S.S.; Tay, E.H. Barrier Lyapunov Functions for the Control of Output-Constrained Nonlinear Systems. Automatica 2009, 45, 918–927. [Google Scholar] [CrossRef]
- Guo, Q.; Zhang, Y.; Celler, B.G.; Su, S.W. State-Constrained Control of Single-Rod Electrohydraulic Actuator with Parametric Uncertainty and Load Disturbance. IEEE Trans. Control Syst. Technol. 2018, 26, 2242–2249. [Google Scholar] [CrossRef]
- Xu, Z.; Qi, G.; Liu, Q.; Yao, J. ESO-Based Adaptive Full State Constraint Control of Uncertain Systems and Its Application to Hydraulic Servo Systems. Mech. Syst. Signal Process. 2022, 167, 108560. [Google Scholar] [CrossRef]
- Xu, Z.; Qi, G.; Liu, Q.; Yao, J. Output Feedback Disturbance Rejection Control for Full-State Constrained Hydraulic Systems with Guaranteed Tracking Performance. Appl. Math. Model. 2022, 111, 332–348. [Google Scholar] [CrossRef]
- Swaroop, D.; Hedrick, J.K.; Yip, P.P.; Gerdes, J.C. Dynamic Surface Control for a Class of Nonlinear Systems. IEEE Trans. Automat. Control 2000, 45, 1893–1899. [Google Scholar] [CrossRef]
- Yao, J.; Deng, W.; Sun, W. Precision Motion Control for Electro-Hydraulic Servo Systems with Noise Alleviation: A Desired Compensation Adaptive Approach. IEEE/ASME Trans. Mechatron. 2017, 22, 1859–1868. [Google Scholar] [CrossRef]
- Wang, C.; Quan, L.; Zhang, S.; Meng, H.; Lan, Y. Reduced-Order Model Based Active Disturbance Rejection Control of Hydraulic Servo System with Singular Value Perturbation Theory. ISA Trans. 2017, 67, 455–465. [Google Scholar] [CrossRef]
- Kokotovic, P.V.; Khalil, H.K.; O’Reilly, J. Singular Perturbation Methods in Control: Analysis and Design; Academic Press: New York, NY, USA, 1986. [Google Scholar]
- Huang, Z.; Xu, Y.; Ren, W.; Fu, C.; Cao, R.; Kong, X.; Li, W. Design of Position Control Method for Pump-Controlled Hydraulic Presses via Adaptive Integral Robust Control. Processes 2021, 10, 14. [Google Scholar] [CrossRef]
- Ahn, K.K.; Nam, D.N.C.; Jin, M. Adaptive Backstepping Control of an Electrohydraulic Actuator. IEEE/ASME Trans. Mechatron. 2014, 19, 987–995. [Google Scholar] [CrossRef]
- Rath, J.J.; Defoort, M.; Sentouh, C.; Karimi, H.R.; Veluvolu, K.C. Output-Constrained Robust Sliding Mode Based Nonlinear Active Suspension Control. IEEE Trans. Ind. Electron. 2020, 67, 10652–10662. [Google Scholar] [CrossRef]
- Wang, Y.; Zhao, J.; Zhang, H.; Wang, H. Robust Output Feedback Control for Electro-Hydraulic Servo System with Error Constraint Based on High-Order Sliding Mode Observer. Trans. Inst. Meas. Control 2023, 45, 1703–1712. [Google Scholar] [CrossRef]
- Won, D.; Kim, W.; Shin, D.; Chung, C.C. High-Gain Disturbance Observer-Based Backstepping Control with Output Tracking Error Constraint for Electro-Hydraulic Systems. IEEE Trans. Control Syst. Technol. 2015, 23, 787–795. [Google Scholar] [CrossRef]
- Jelali, M.; Kroll, A. Hydraulic Servo-Systems; Springer: London, UK, 2003. [Google Scholar]
- Helian, B.; Chen, Z.; Yao, B.; Lyu, L.; Li, C. Accurate Motion Control of a Direct-Drive Hydraulic System with an Adaptive Nonlinear Pump Flow Compensation. IEEE/ASME Trans. Mechatron. 2021, 26, 2593–2603. [Google Scholar] [CrossRef]
- Habibi, S.; Goldenberg, A. Design of a New High-Performance Electrohydraulic Actuator. IEEE/ASME Trans. Mechatron. 2000, 5, 158–164. [Google Scholar] [CrossRef]
- Chen, Z.; Helian, B.; Zhou, Y.; Geimer, M. An Integrated Trajectory Planning and Motion Control Strategy of a Variable Rotational Speed Pump-Controlled Electro-Hydraulic Actuator. IEEE/ASME Trans. Mechatron. 2023, 28, 588–597. [Google Scholar] [CrossRef]
- Chen, G.; Liu, H.; Jia, P.; Qiu, G.; Yu, H.; Yan, G.; Ai, C.; Zhang, J. Position Output Adaptive Backstepping Control of Electro-Hydraulic Servo Closed-Pump Control System. Processes 2021, 9, 2209. [Google Scholar] [CrossRef]
- Armstrong-Hélouvry, B.; Dupont, P.; De Wit, C.C. A Survey of Models, Analysis Tools and Compensation Methods for the Control of Machines with Friction. Automatica 1994, 30, 1083–1138. [Google Scholar] [CrossRef]
- Makkar, C.; Dixon, W.E.; Sawyer, W.G.; Hu, G. A New Continuously Differentiable Friction Model for Control Systems Design. In Proceedings of the 2005 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Monterey, CA, USA, 24–28 July 2005; pp. 600–605. [Google Scholar]
- Thenozhi, S.; Sanchez, A.C.; Rodriguez-Resendiz, J. A Contraction Theory-Based Tracking Control Design with Friction Identification and Compensation. IEEE Trans. Ind. Electron. 2022, 69, 6111–6120. [Google Scholar] [CrossRef]
- Yao, J.; Deng, W.; Jiao, Z. Adaptive Control of Hydraulic Actuators with LuGre Model-Based Friction Compensation. IEEE Trans. Ind. Electron. 2015, 62, 6469–6477. [Google Scholar] [CrossRef]
- Deng, W.; Zhou, H.; Zhou, J.; Yao, J. Neural Network-Based Adaptive Asymptotic Prescribed Performance Tracking Control of Hydraulic Manipulators. IEEE Trans. Syst. Man Cybern. Syst. 2023, 53, 285–295. [Google Scholar] [CrossRef]
- Wang, S.; Yu, H.; Yu, J. Robust Adaptive Tracking Control for Servo Mechanisms with Continuous Friction Compensation. Control Eng. Pract. 2019, 87, 76–82. [Google Scholar] [CrossRef]
- Krstić, M.; Kanellakopoulos, I.; Kokotović, P.V. Nonlinear and Adaptive Control Design; Adaptive and Learning Systems for Signal Processing, Communications, and Control; Wiley: New York, NY, USA, 1995. [Google Scholar]
- Zang, W.; Chen, X.; Zhao, J. Multi-Disturbance Observers-Based Nonlinear Control Scheme for Wire Rope Tension Control of Hoisting Systems with Backstepping. Actuators 2022, 11, 321. [Google Scholar] [CrossRef]
- Ran, M.; Li, J.; Xie, L. A New Extended State Observer for Uncertain Nonlinear Systems. Automatica 2021, 131, 109772. [Google Scholar] [CrossRef]
- Ren, B.; Ge, S.S.; Tee, K.P.; Lee, T.H. Adaptive Neural Control for Output Feedback Nonlinear Systems Using a Barrier Lyapunov Function. IEEE Trans. Neural Netw. 2010, 21, 1339–1345. [Google Scholar]
- Khalil, H.K. Nonlinear Systems, 3rd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 2002. [Google Scholar]
- Cai, Y.; Ren, G.; Song, J.; Sepehri, N. High Precision Position Control of Electro-Hydrostatic Actuators in the Presence of Parametric Uncertainties and Uncertain Nonlinearities. Mechatronics 2020, 68, 102363. [Google Scholar] [CrossRef]
- Sobczyk, M.R.; Gervini, V.I.; Perondi, E.A.; Cunha, M.A.B. A Continuous Version of the LuGre Friction Model Applied to the Adaptive Control of a Pneumatic Servo System. J. Frankl. Inst. 2016, 353, 3021–3039. [Google Scholar] [CrossRef]
- Gu, W.; Yao, J.; Yao, Z.; Zheng, J. Robust Adaptive Control of Hydraulic System with Input Saturation and Valve Dead-Zone. IEEE Access 2018, 6, 53521–53532. [Google Scholar] [CrossRef]
- Wang, C.; Quan, L.; Jiao, Z.; Zhang, S. Nonlinear Adaptive Control of Hydraulic System with Observing and Compensating Mismatching Uncertainties. IEEE Trans. Control Syst. Technol. 2018, 26, 927–938. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Indices | MAX (mm∙s) | ISE (mm2∙s) | ITAE (m∙s) |
|---|---|---|---|
| SPC RNC | 0.374 0.484 | 0.029 0.086 | 0.469 0.896 |
| BDC | 0.839 | 0.322 | 2.189 |
| Indices | MAX (mm∙s) | ISE (mm2∙s) | ITAE (m∙s) |
|---|---|---|---|
| SPC | 0.344 | 0.027 | 0.460 |
| RNC | 0.470 | 0.075 | 0.862 |
| BDC | 0.612 | 0.140 | 0.859 |
| Indices | MAX (mm∙s) | ISE (mm2∙s) | ITAE (m∙s) |
|---|---|---|---|
| SPC RNC | 0.772 1.331 | 0.537 2.428 | 2.646 5.613 |
| BDC | 1.571 | 3.354 | 6.961 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, B.-L.; Cai, Y.; Song, J.-C.; Liang, Q.-K. A Singular Perturbation Theory-Based Composite Control Design for a Pump-Controlled Hydraulic Actuator with Position Tracking Error Constraint. Actuators 2023, 12, 265. https://doi.org/10.3390/act12070265
Wang B-L, Cai Y, Song J-C, Liang Q-K. A Singular Perturbation Theory-Based Composite Control Design for a Pump-Controlled Hydraulic Actuator with Position Tracking Error Constraint. Actuators. 2023; 12(7):265. https://doi.org/10.3390/act12070265
Chicago/Turabian StyleWang, Bing-Long, Yan Cai, Jin-Chun Song, and Qian-Kun Liang. 2023. "A Singular Perturbation Theory-Based Composite Control Design for a Pump-Controlled Hydraulic Actuator with Position Tracking Error Constraint" Actuators 12, no. 7: 265. https://doi.org/10.3390/act12070265
APA StyleWang, B.-L., Cai, Y., Song, J.-C., & Liang, Q.-K. (2023). A Singular Perturbation Theory-Based Composite Control Design for a Pump-Controlled Hydraulic Actuator with Position Tracking Error Constraint. Actuators, 12(7), 265. https://doi.org/10.3390/act12070265