1. Introduction
As high-speed railway technology is continuously developing and the number of trains is rapidly increasing, high-speed trains have gradually become an important part of China’s railway transportation. Undoubtedly, the increasing number of trains enables individuals to complete more transportation tasks together, which greatly improves the transportation efficiency. However, the shortening of the distance among trains poses a great threat to the operation safety. When the operating density increases, guaranteeing the safety distance among trains become a technical problem [
1,
2]. Nowadays, a novel train-centered communication-based train control (CBTC) system via train-to-train radio communication is proposed as an evolution direction for future transportation [
3]. The train communicates directly with its neighboring trains through a wireless network to achieve cooperative control for autonomous resource management and active interval protection [
4]. Therefore, a feasible multiple trains cruise control scheme is developed that can effectively solve the operation interval problem.
The implementation of train-to-train radio communication technology in high-speed railways has attracted numerous investigators to conduct in-depth research on cooperative cruise control for multiple trains, and they have obtained fruitful achievements [
5,
6,
7,
8,
9]. It is an interesting research topic in which each train dynamically adjusts its speed and position by communicating with neighboring trains. Ning et al. [
5] proposed a cooperative model with a back-fence communication topology, which was used to design a distributed cooperative controller for high-speed trains under a moving block system. Li et al. [
6] considered the presence of unknown parameters in the system and proposed an adaptive distributed cooperative control strategy to identify the unknown parameters. Lin et al. [
7] addressed the problem of the cooperative tracking control of multiple trains with a distributed speed and input constraints and put forward the model transformation and convex analysis method, whereby all trains are guaranteed to run in a stable mode and track the required speed. Gao et al. [
8] addressed the problem of cooperative control for multiple high-speed trains to achieve the required performance tracking; that is, to ensure that the speed and position of high-speed trains are respectively limited within the specific speed limit and allowable distance approved by the automatic train protection and moving authorities. Wang et al. [
9] improved the potential function in [
6] and proposed a new cooperative cruise control strategy, where interestingly, the safety distance between trains could be dynamically adjusted according to the train speed.
However, the previous cooperative cruise control that only focuses on improving the operation efficiency (running safety, speed tracking) is not realistic. The energy consumption of the cooperative operation of multiple high-speed trains poses an increasing threat to the ecological environment, which is not conducive to the long-term development of railway transportation in the current context of the increasing energy shortage [
10,
11]. Thus, energy-saving optimization is another indispensable performance index that needs to be considered in addition to the operation efficiency.
Some existing research reports have token energy-saving optimization as the key objective for the control problem of multiple high-speed trains. Huang et al. [
12] proposed a comprehensive energy-saving operation optimization method for multiple trains between multiple stations by considering regenerative braking. Chen et al. [
13] aimed to minimize the total energy consumption for multiple trains by optimizing and updating speed curves and considering the regenerative braking power losses on the catenary. In order to minimize the difference between traction energy consumption and regenerative energy consumption, Su et al. [
14] proposed a comprehensive train operation method by jointly optimizing the train schedule and driving strategy. From the energy-saving perspective, these discussions can effectively improve the energy efficiency, but they are not distributed cooperative control methods. The state information of neighboring trains transmitted by the network are ignored and useless. The minimum safe distance is also not preserved.
Therefore, it is crucial to design a cooperative cruise controller that can simultaneously solve the operational safety, speed tracking and energy saving issues, which will be another urgent and attractive problem and of important practical significance. Motivated by the above analysis, this paper will design a distributed cooperative cruise controller for multiple trains with energy-saving optimization. Moreover, LQR optimization is widely used in the energy optimization of a single train operation [
15,
16], which could minimize the performance index function by designing a control gain. Since the optimal control gain of linear feedback can be obtained, it is easy to construct a closed-loop optimal control to obtain the minimum possible energy consumption [
17,
18,
19,
20].
In this paper, in order to combine the advantages of both LQR and the distributed cooperative control, a cooperative control strategy based on a leader-following multiagent system distributed-consensus algorithm is proposed, and a performance index is constructed by considering the relative state errors and energy consumption. An LQR-based optimal design technique is introduced when designing the cooperative cruise control to optimize the cooperative control gain in order to find the optimal solution and achieve the minimum tracking error and energy consumption when it comes to the cooperative operation of multiple trains. Additionally, it is worth noting that a scalar coupling gain is also introduced to decouple the design of the optimal cooperative control gain from the train communication topology, which weakens the impact of the communication topology. Numerical examples illustrate the rationality of the proposed distributed optimization approach. Compared with the existing studies, the major contributions of this report are described as follows:
An optimal distributed cooperative cruise control strategy for multiple trains is proposed, in which the LQR optimal design technology is exploited to optimize the cooperative control gains, such that the speed of all trains can rapidly converge to the desired speed curve with an efficiently reduced energy consumption.
The proposed control strategy is robust for arbitrary directed communication topologies. A scalar coupling gain is introduced to decouple the design of the cooperative control gain by using information on the topological structure characteristics as they pertain to the system stability, and the optimality of the cooperative control can be ensured by properly selecting the scalar coupling gain.
It is strictly proved that the multiple train system can eventually achieve asymptotic stability with the proposed optimal distributed cooperative control.
The rest of this report is structured as follows. The longitudinal dynamics model and the related communication topology principle of multiple high-speed trains are presented in
Section 2. In
Section 3, an optimal distributed cooperative control strategy based on LQR is designed for each high-speed train, and the stability of the system is proved. In
Section 4, two control strategies are simulated and compared to verify the feasibility of the proposed method. In
Section 5, we give a brief summary.
2. Problem Formulation
The present section mainly carries out two works. In the first work, a longitudinal nonlinear dynamic model that can capture the main characteristics of train dynamics is constructed. In the second work, we use graph theory to describe the communication relationships between adjacent trains.
2.1. Dynamic Model of High-Speed Trains
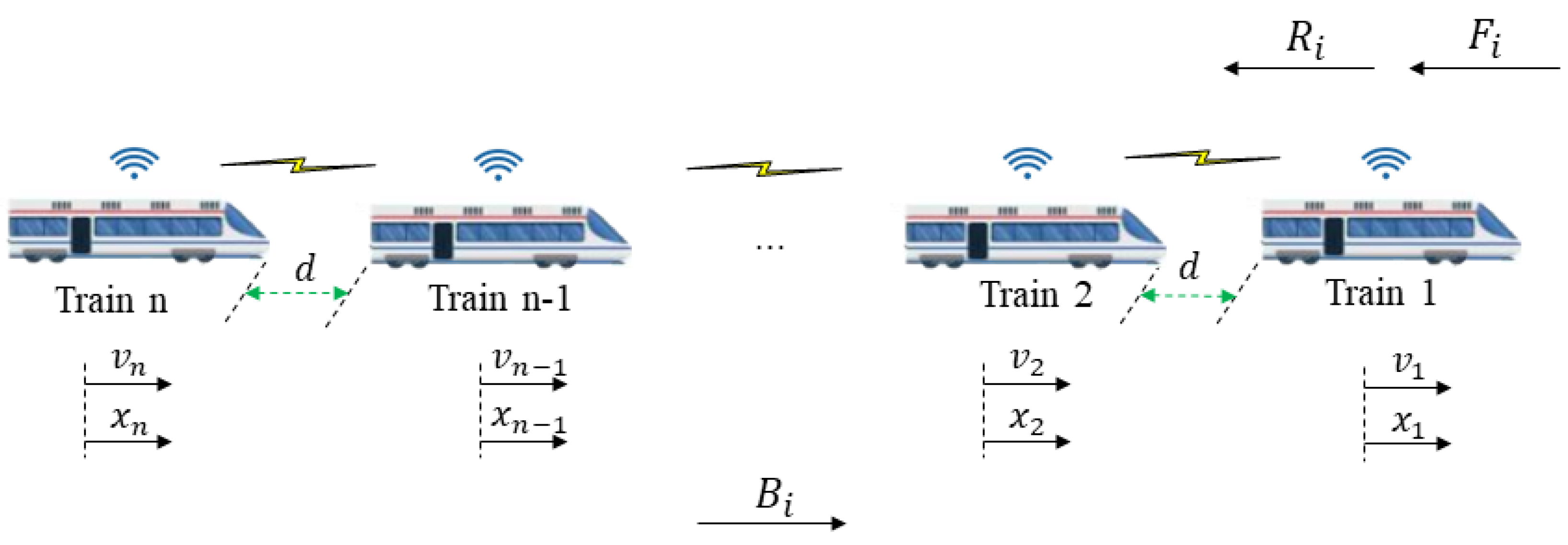
The cruise control system of multiple trains that is investigated in this paper consists of
n trains with double integrator dynamics, and each train is strictly defined as a rigid particle, which is plotted in
Figure 1. In actual operation, the safe distance is far greater than the length of the train, so it is quite regular to regard the train as a rigid particle from the viewpoint of practical considerations [
21]. In
Figure 1, it can be observed that the longitudinal force of high-speed trains mainly includes three types of forces, namely, the traction force
in the direction of motion, the braking force
and the resistance force
in the opposite direction of motion. The resistance force
is generally composed of basic resistance and additional resistance. The basic resistance exists throughout the entire operation of the train, while the additional resistance only exists on special routes such as slopes, curves and tunnels.
The basic resistance is mainly composed of two parts, namely, mechanical resistance and aerodynamic resistance. The mechanical resistance is composed of rolling friction, which is generated by the train wheels running on the railway track; sliding friction, which is caused by the wheels sliding on the railway track; impact and vibration resistance, which is caused by the wheel–rail impact and vibration during rolling; and bearing friction resistance, which is generated by the relative movement between the bearing and its inner and outer rings during rolling. The aerodynamic resistance is the running resistance generated by the relative movement between the train body and the air during the operation, which includes pressure difference resistance and air friction resistance. When conducting experimental calculations on these resistances, due to the influence of various factors such as the train type and operating conditions, standard measurement values cannot often be obtained. Therefore, it is frequently represented by the Davis equation [
22] when designing the train control system based on the train dynamics model. The additional gravitational resistance and curvature resistance are considered. The total resistance is expressed as follows:
where
denotes the mass of the train
i.
,
,
denotes the resistance coefficients, which can be obtained through wind tunnel experiments [
23], and its value is impacted by many factors, such as the train type, operating conditions, etc. The first two terms denote the rolling mechanical resistance and the third term is the air resistance. The gravitational and curvature resistance forces experienced by the train are
and
, respectively.
Based on the above force analysis for high-speed trains, by Newton’s second law of motion, the nonlinear dynamics model of the trains can be described by the following differential equation:
in which
,
denotes the actual position and speed. It is important to note that
refers to the braking force or tractive force of each train. The target of this work is to obtain an optimal distributed cooperative control strategy
, such that the positions and speeds of each train could be governed by controlling their accelerations, to reduce the unnecessary energy consumption caused by the train during traction or braking and to guarantee an adequate level of efficiency and energy-saving with the train operation.
2.2. Communication Network Topology among Trains
Graph theory is typically used to explain the communication relationships between agents in multiagent systems. In this section, some facts about graph theory used in this paper are reviewed. For the running convoy containing n trains, each train is considered as an agent, and the state information is transmitted through the communication between the trains to reach a consensus. Let be a directed graph, in which , is a set of trains that mean the number of trains and is constituted by a set of edges. If , then it means that these trains can communicate with each other and there is an edge between them. refers to the adjacency matrix of the graph, denoted by , which is usually used to describe the communication connectivity between trains. If the ith train can communicate with the jth train, then , otherwise . The in-degree matrix represents the number of the trains that train i can receive information from, and the Laplacian matrix is described as . For a directed graph, L always has an eigenvalue 0 if it contains a directed spanning tree.
3. The Cooperative Controller Design
This section describes the design of an optimal distributed cooperative control strategy for multiple trains, which combines distributed consensus algorithms and
optimization algorithms.
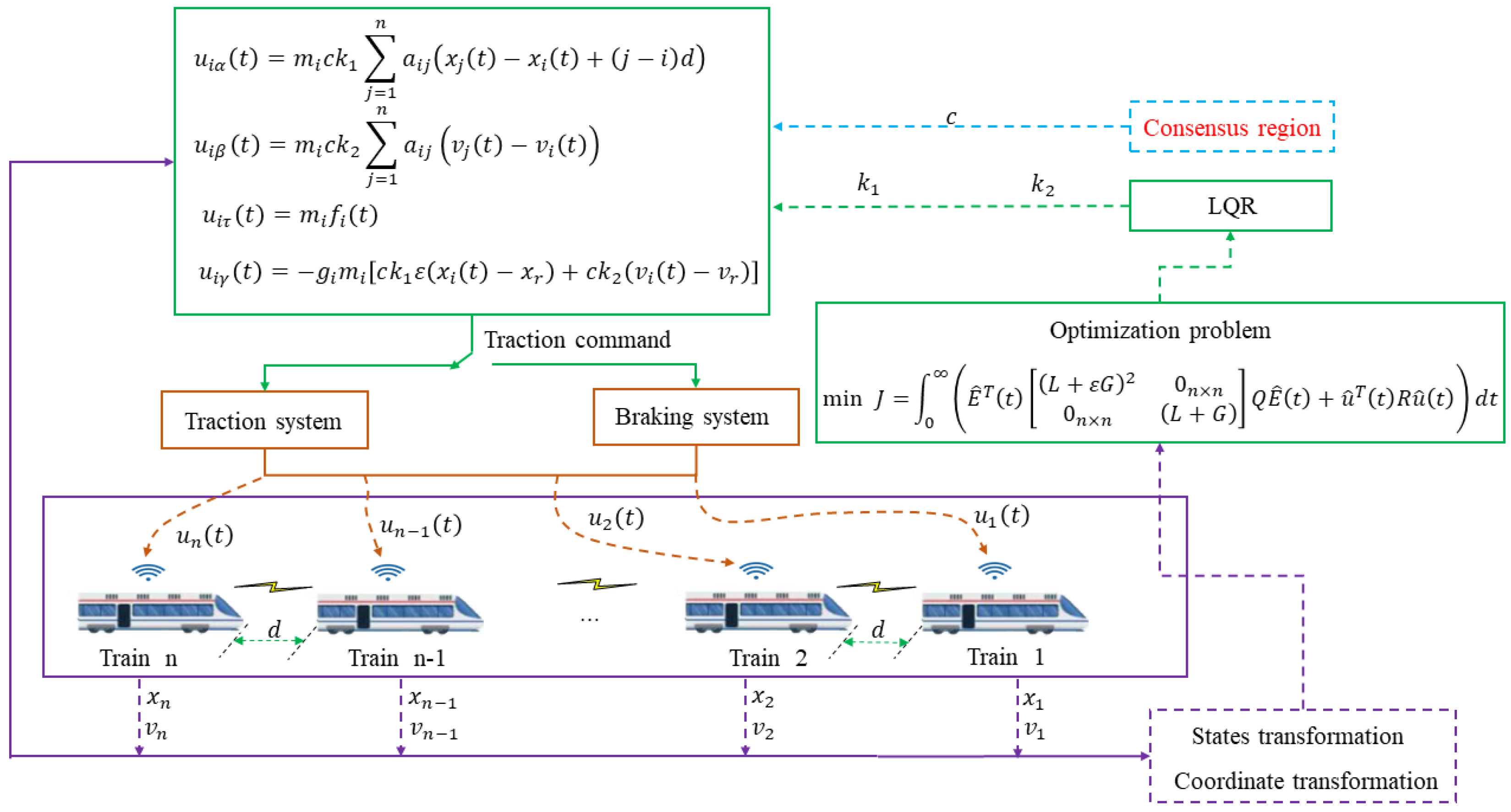
Figure 2 depicts the fundamental framework of the proposed control strategy. The controller for each train is composed of four parts, and the specific details are elaborated in the following section. On this basis, a performance index function with distributed characteristics was established, which includes three types of performance indexes: the relative speed error, relative distance error and energy consumption. Subsequently, the
optimization algorithm was utilized to solve and obtain the optimal cooperative control gains
and
to achieve the objective of energy-saving optimization. Finally, the concept of a consensus region is introduced, and the necessary and sufficient conditions of scalar coupling gain
c are derived.
3.1. The Basic Cooperative Control Strategy Design
Compared with the traditional CBTC system, the CBTC system framework based on train-to-train communication is simplified, the number of trackside equipment is reduced, and the most important action is to decrease the communication delay. Therefore, we temporarily presumed that there was a communication delay in the tolerable range when analyzing the system [
24]. Then, we proposed a distributed cooperative control strategy and gave the following definitions:
Definition 1. The control strategy designed for the system model in (1) has the following two features:
- 1.
The rear trains receive information about the states of the preceding train at all times and adjust their states in time until all trains are tracking the desired speed
- 2.
The interval among the trains can be kept at a safe distance under all the transient responses, and the trains can eventually converge to a fixed distance.
The proposed distributed cooperative control strategy
for each train is determined to contain the following four components:
where
refers to a formation control term, which is used to promote the alignment of the displacement state information. In
,
d is the desired distance among trains, which is always given as the minimum safe distance of each line.
represents the interaction of speed state information between the trains.
is used to overcome the effects of basic resistance and gravitational and curvature resistance force.
indicates that each train can quickly follow the curve trajectory of the virtual leader train after a period of time, and all trains have a unified desired speed
and desired position
, where
is a positive constant to overcome the defect of a large speed error at the initial time caused by the position error.
is the pinning gain matrix element, which provides a definition as follows:
Definition 2. is used to identify whether the train i can receive the information from the virtual leader train without a loss of generality; if so, then , otherwise .
From the above, the distributed cooperative optimized control strategy for each train in this paper has the following form:
in which
c is the scalar coupling gain.
and
are the cooperative control gains to be determined by the designer, which are related to the control performance. In particular, the function of the first item in Equation (
4) is to achieve a distributed consensus among the trains, and its requirement is that the communication topology needs to contain a directed spanning tree.
3.2. States Transformation and Coordinate Transformation
When each high-speed train is tracking the desired speed, its real-time speed is
and its real-time position is
, in which
denotes the initial time and
represent the end time. In order to obtain the error dynamics model of the multiple trains system, we defined
,
as the position error and speed error, respectively. Combining (1) and (4), the error dynamics model of the high-speed train can then be derived:
It is obviously observed from model (5) that the existence of the safety distance
d is not conducive to the subsequent transformation of the model into a standard linear system model. Therefore, the formation tracking problem is transformed into a basic consensus problem by introducing coordinate transformation (6) [
25]. Let
Under (6), we can obtain that
Based on (6) and (7), the error dynamics model (5) could be rewritten as
where
The error dynamics Equation (
8) could be formulated as a fundamental linear compact state-space model:
where the state matrix
, the input matrix
, and
;
denotes the error states of the multiple trains system and
indicates the error of the control input.
3.3. The Optimal Cooperative Control Design
Although the cooperative control gains given freely based on the control performance can optimize the control performance, the analysis process does not give a clear performance index to measure the operation performance and energy consumption, and it is difficult to consider the optimization problem by integrating the energy consumption and operation performance [
5,
6,
7,
8,
9]. To meet the requirements of safe tracking and energy saving during the cooperative operation of high-speed trains, it is an effective method to design a cooperative control strategy by adopting optimal control ideas under the constraints of a performance index function.
Based on state errors among neighboring trains and energy consumption, the following performance index function is constructed for each train [
26]:
where
,
and
are adjustable weighting parameters. The first two terms represent the relative state error between the trains, which improves the operation efficiency by minimizing the error. The third term referring the control input represents the energy consumption for the operation, which is minimized to achieve an energy-saving optimization.
Since this paper focuses on the multiple trains cooperative operation optimization problem, and considering that the global optimal solution can be easily obtained by using the global performance index, the performance index function including all trains is obtained on the basis of (10), and its global form is given as follows:
where
,
,
and
.
When finding an optimal control input error
, the performance index function can be minimized, which means that the performance index reaches the optimal level when the system is stable:
where
is the optimal cooperative control gain matrix to be designed.
is the scalar coupling gain matrix.
is the global error states with elements
and
.
Then, the global error dynamics of the closed-loop system is given as
where
.
3.4. Stability of the System
The criterion for the asymptotic stability of the system and the necessary and sufficient condition to obtain a scalar coupling gain to satisfy the unbounded consensus region are given below.
Lemma 1 ([
19]).
Let and denote the eigenvalues of L and G, where , and are the real and imaginary parts of the eigenvalues, respectively. Only when the matrixesare Hurwitz, the closed-loop system (12) can guarantee asymptotic stability. From Lemma 1, it can be determined that the arbitrary cooperative control gains and may not achieve consensus under the specified communication topology. In Theorem 1, the method of obtaining the optimal cooperative control gains is given to ensure the stability of any directed graph including the spanning tree by using the optimal design based on LQR and selecting the coupling gain c correctly. Before that, we introduce the concept of the consensus region as shown below.
Lemma 2 ([
19]).
The consensus region reflects the robustness of the consensus. The larger the scope of a system’s consensus region, the easier it is to converge. An unbounded consensus region is more convenient for the design of a cooperative control strategy than a bounded consensus region, so it is necessary to find an unbounded consensus region for a cooperative control strategy based on the consensus algorithm. Define the consensus region S: ifthe demonstrates asymptotic stability. Theorem 1. Assuming that both and are symmetric positive definite matrices, that is, and , then the cooperative control gain K is obtained as follows:in which P is the solution of the Riccati equation, which is the symmetric matrix, namely where , For the distributed cooperative control strategy (4), if the optimal cooperative control gain is selected according to Equation (16), then the consensus region is unbounded and there is a conservative consensus region that satisfies The global error dynamics (14) are asymptotically stable if the scalar coupling gain c satisfies the following conditions: Proof. Using Equations (16) and (17), perform the following mathematical transformations by substituting Equation (
14) into the Lyapunov equation:
Since the matrix
is a complex matrix, it is known from matrix theory that each element needs to be conjugated before transposing it; thus, we can obtain that:
□
Since
,
, if
holds, that is, Equation (
19) satisfies the condition,
can achieve gradual stability. Similarly, replace
with
s in the above transformations, and Equation (
18) meets the requirements, which means that the proof is completed.
Remark 1. In this paper, we only consider the cooperative cruise operation for multiple trains on a high-speed railway mainline. In other words, our work excludes the communication topology changes caused by the following operational conditions: (1) There are other trains merging into the railway mainline. (2) There are trains exiting from the railway mainline. Therefore, the communication topology between trains given in this paper is always a fixed directed graph with a spanning tree. Thus, the matrices and always have positive real parts for the eigenvalues.
Remark 2. Consider the impact of some irregular events that may exist in reality (e.g., extreme weather, complex terrain, etc.) on the communication topology. The introduction of scalar coupling gain c can decouple the design of optimal cooperative control gain K from the communication topology of trains, which means that the change in the communication topology will not have any negative effect on multiple trains’ cooperative control. Therefore, the proposed distributed cooperative strategy is robust for any communication topology.
Remark 3. It is worth noting that the lower bound of the scalar coupling gain (19) is related to the second smallest eigenvalue of the Laplacian matrix and the largest eigenvalue of the pinning matrix, because both of them are directly linked to the states’ convergence speed. By properly selecting the scalar coupling gain, and can be used to solve the multiple trains’ tracking control problem, and it is meanwhile not necessary to recalculate for different and , which thus reduces the computational complexity.
Remark 4. The weight matrix contains the eigenvalues and of global information and , which are related to the maximal eigenvalues and , which means the distributed optimization cannot be achieved. To avoid using the global information and , we can use their upper bound and in (16), which can be obtained in terms of the maximal node degree by using the Gershgorin Disk Theorem, i.e., 
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}