
Fault Diagnosis of Mine Truck Hub Drive System Based on LMD Multi-Component Sample Entropy Fusion and LS-SVM

Abstract
:1. Introduction
2. Literature Analysis
- (1)
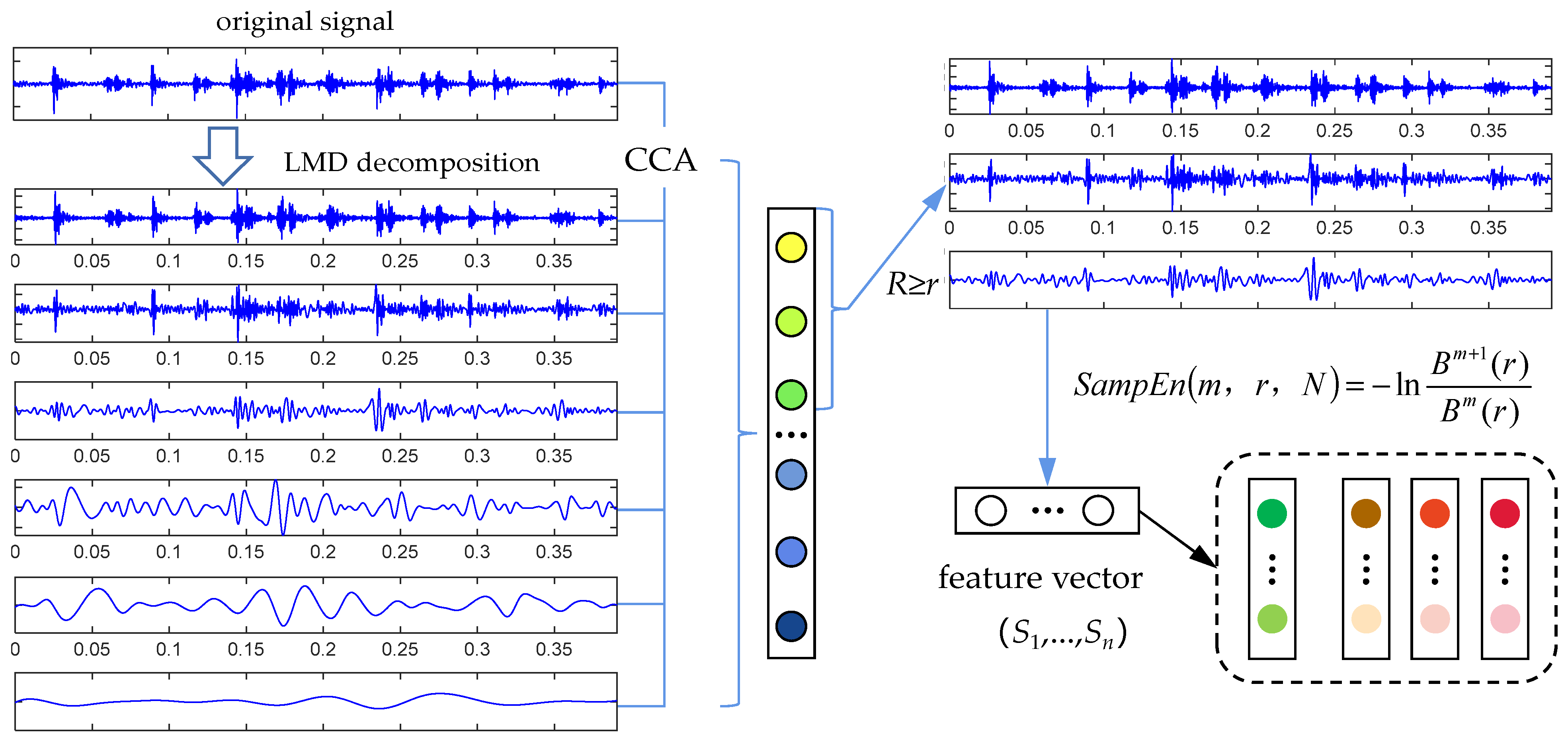
- A feature extraction method based on LMD multi-component sample entropy fusion is proposed. Aiming at the problems of mode confusion and poor accuracy in LMD decomposition, canonical correlation analysis (CCA) [34,35] is used to discriminate the true and false components of the decomposed PF, and then the multi-component sample entropy fusion sample entropy feature is constructed.
- (2)
- Combining the vibration signal characteristics of the wheel drive system, the LMD multi-component sample entropy fusion feature is introduced into the fault diagnosis of nonstationary and nonlinear vibration signals in the wheel drive system, better characterizing the fault feature information.
- (3)
- In response to the difficulty in obtaining vibration signals from the wheel drive system and the small number of samples, LS-SVM is proposed to classify fault features using LMD multi-component sample entropy fusion features extracted from the vibration signals of the wheel drive system, which improves the accuracy of the algorithm.
- (4)
- The effectiveness of this method has been verified through experiments.
3. Theory
3.1. Local Mean Decomposition
3.2. Sample Entropy
3.3. Canonical Correlation Analysis
3.4. LMD Multi-Component Sample Entropy Fusion
3.5. LS-SVM
4. Experimental Analysis
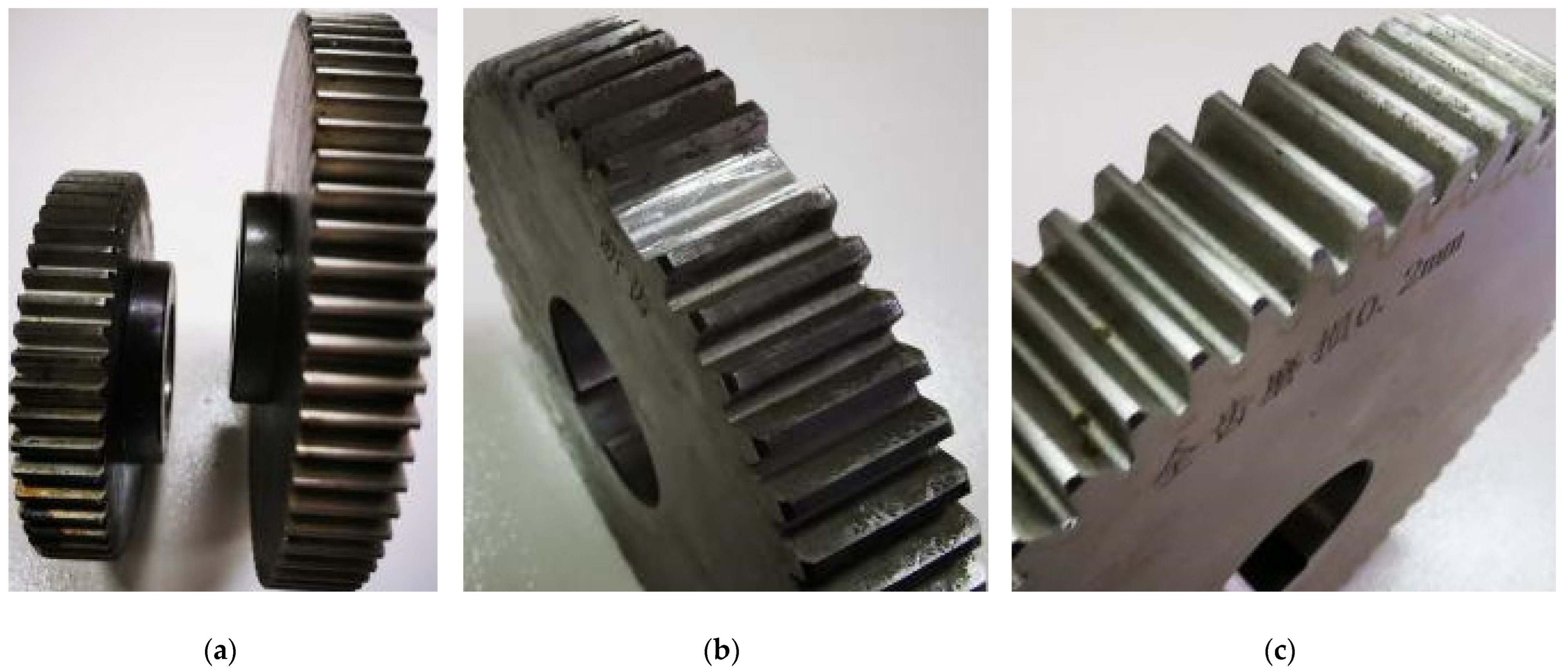
4.1. Data Collection
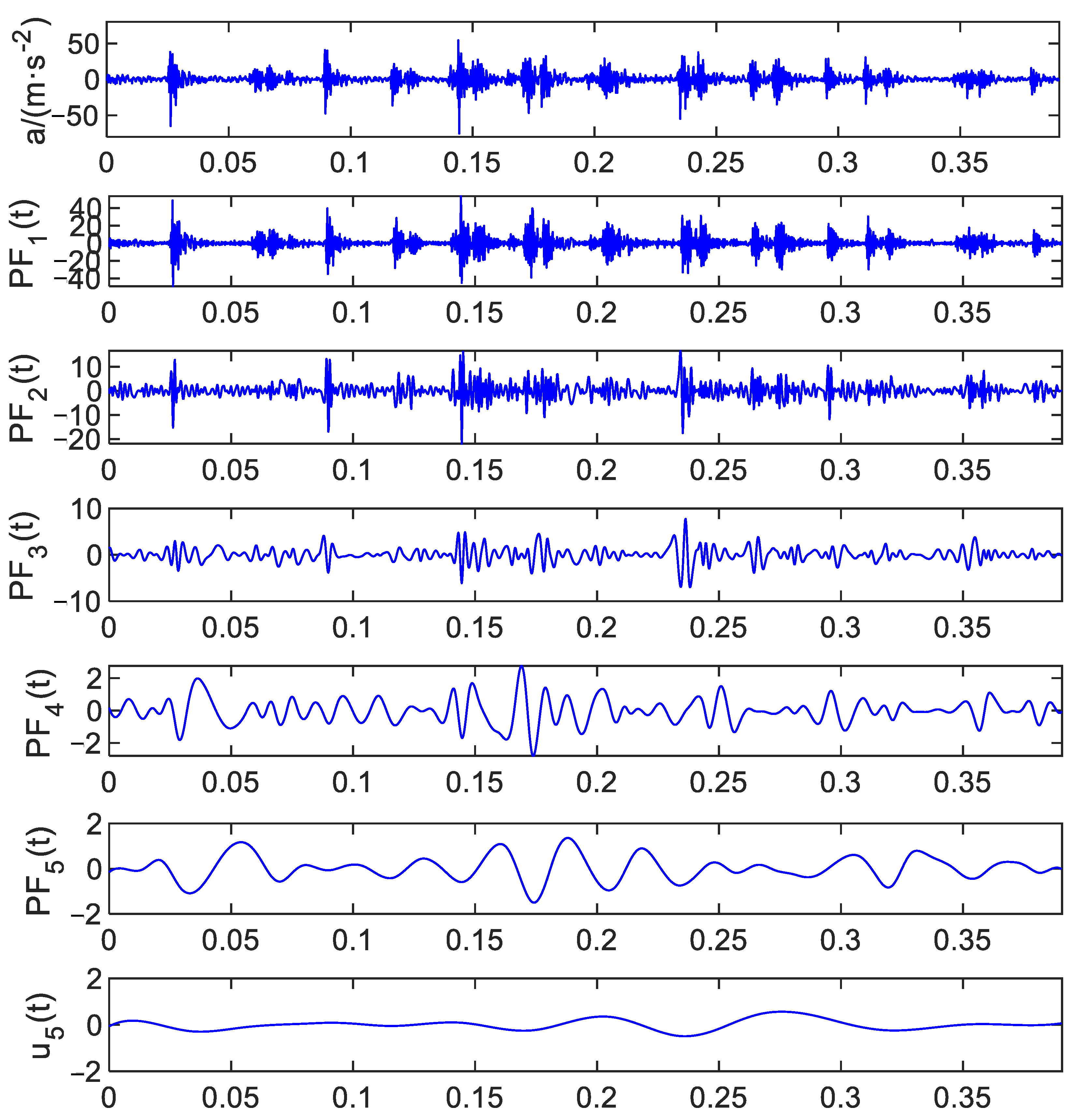
4.2. Vibration Signal Analysis
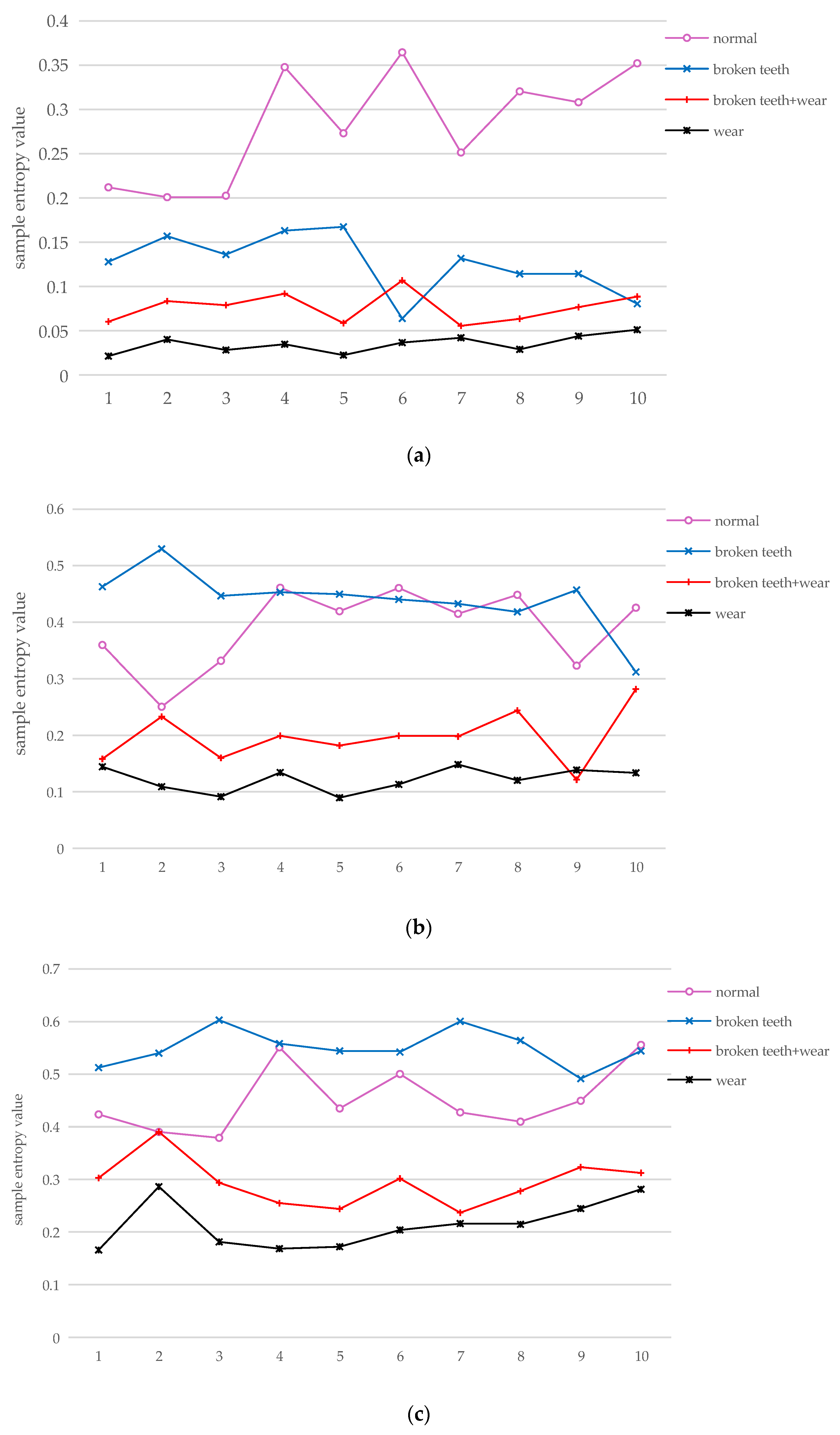
4.3. Fault Feature Extraction
4.4. Classification of Fault States
5. Conclusions
- (1)
- The proposed LMD multi-component sample entropy fusion can effectively extract fault diagnosis features within the wheel drive system, which has significant advantages compared to traditional methods.
- (2)
- Introducing LS-SVM into the fault feature classification of wheel hub drive systems, the RBF kernel function is analyzed to be more suitable for fault classification in this study through two dimensions of training time and testing accuracy.
- (3)
- The method was applied to gear experimental data and achieved good diagnostic results.
- (4)
- The proposed method has been validated through experimental data analysis, but, due to significant differences in vibration characteristics caused by complex working conditions and varying degrees of component damage, further research is needed on the diagnostic effectiveness in actual working environments.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Irina, M.; Gulnaz, M.; Vadim, M.; Dmitry, M. Improving the Environmental Friendliness of the Mining Complex Through Alternative Fuel for Mine Dump Trucks. Transp. Res. Procedia 2023, 68, 755–760. [Google Scholar]
- Yosoon, C.; Hoang, N.; Xuan-Nam, B.; Trung, N. Optimization of haulage-truck system performance for ore production in open-pit mines using big data and machine learning-based methods. Resour. Policy 2022, 75, 102522. [Google Scholar]
- Pan, Z.; Zhang, Z.; Meng, Z.; Wang, Y. A novel fault classification feature extraction method for rolling bearing based on multi-sensor fusion technology and EB-1D-TP encoding algorithm. ISA Trans. 2023; in press. [Google Scholar]
- Lu, N.; Li, M.; Zhang, G.; Li, R.; Zhou, T.; Su, C. Fault feature extraction method for rotating machinery based on a CEEMDAN-LPP algorithm and synthetic maximum index. Measurement 2022, 189, 110636. [Google Scholar] [CrossRef]
- Bian, K.; Wu, Z. Data-based model with EMD and a new model selection criterion for dam health monitoring. Eng. Struct. 2022, 260, 114171. [Google Scholar] [CrossRef]
- Liu, Y.L.; Yuan, D.; Gong, Z.; Jin, T.; Mohamed, M.A. Adaptive spectral trend based optimized EWT for monitoring the parameters of multiple power quality disturbances. Int. J. Electr. Power Energy Syst. 2023, 146, 108797. [Google Scholar] [CrossRef]
- Holger, G.; Jan, Z.; Norbert, W.; Aziz, H.; Michael, A. Method of Process Optimization for LMD-Processes using Machine Learning Algorithms. Procedia Comput. Sci. 2023, 217, 1506–1512. [Google Scholar]
- Meng, D.; Wang, H.; Yang, S.; Lv, Z.; Hu, Z.; Wang, Z. Fault Analysis of Wind Power Rolling Bearing Based on EMD Feature Extraction. Comput. Model. Eng. Sci. 2022, 130, 543–558. [Google Scholar]
- Yin, C.; Wang, Y.; Ma, G.; Wang, Y.; Sun, Y.; He, Y. Weak fault feature extraction of rolling bearings based on improved ensemble noise-reconstructed EMD and adaptive threshold denoising. Mech. Syst. Signal Process. 2022, 171, 108834. [Google Scholar] [CrossRef]
- Ziani, R.; Hammami, A.; Chaari, F.; Felkaoui, A.; Haddar, M. Gear fault diagnosis under non-stationary operating mode based on EMD, TKEO, and Shock Detector. Comptes Rendus Mécanique 2019, 347, 663–675. [Google Scholar] [CrossRef]
- Randall, R.B.; Antoni, J. Why EMD and similar decompositions are of little benefit for bearing diagnostics. Mech. Syst. Signal Process. 2023, 192, 110207. [Google Scholar] [CrossRef]
- Irene, K.; Chou, S.; Anindhita, D. Wind power forecasting based on hybrid CEEMDAN-EWT deep learning method. Renew. Energy 2023, 218, 119357. [Google Scholar]
- Chegini, S.N.; Bagheri, A.; Najafi, F. Application of a new EWT-based denoising technique in bearing fault diagnosis. Measurement 2019, 144, 275–297. [Google Scholar] [CrossRef]
- Hu, M.; Wang, G.; Ma, K.; Cao, Z.; Yang, S. Bearing performance degradation assessment based on optimized EWT and CNN. Measurement 2021, 172, 108868. [Google Scholar] [CrossRef]
- Mo, Z.; Zhang, H.; Shen, Y.; Wang, J.; Fu, H.; Miao, Q. Conditional empirical wavelet transform with modified ratio of cyclic content for bearing fault diagnosis. ISA Trans. 2023, 133, 597–611. [Google Scholar] [CrossRef] [PubMed]
- Gong, W.; Li, A.; Wu, Z.; Qin, F. Nonlinear vibration feature extraction based on power spectrum envelope adaptive empirical Fourier decomposition. ISA Trans. 2023, 139, 660–674. [Google Scholar] [CrossRef]
- Smith, J.S. The local mean decomposition and its application to EEG perception data. J. R. Soc. Interface 2005, 2, 443–454. [Google Scholar] [CrossRef] [PubMed]
- Arejita, B.; Garmendia, I.; Isaza, J.; Zuloaga, A. Dynamic control for LMD processes using sensor fusion and edge computing. Procedia CIRP 2022, 111, 308–312. [Google Scholar] [CrossRef]
- Tian, Z. Short-term wind speed prediction based on LMD and improved FA optimized combined kernel function LSSVM. Eng. Appl. Artif. Intell. 2020, 91, 103573. [Google Scholar] [CrossRef]
- Han, M.; Wu, Y.; Wang, Y.; Liu, W. Roller bearing fault diagnosis based on LMD and multi-scale symbolic dynamic information entropy. J. Mech. Sci. Technol. 2021, 35, 1993–2005. [Google Scholar] [CrossRef]
- Song, E.; Gao, F.; Yao, C.; Ke, Y. Research on Rolling Bearing Fault Diagnosis Method Based on Improved LMD and CMWPE. J. Fail. Anal. Prev. 2021, 21, 1714–1728. [Google Scholar] [CrossRef]
- Xie, L.; Lang, X.; Chen, J.; Horch, A.; Su, H. Time-varying oscillation detector based on improved LMD and robust Lempel-Ziv complexity. Control. Eng. Pract. 2016, 51, 48–57. [Google Scholar] [CrossRef]
- Ling, M.; Bian, X.; Wang, S.; Huang, T.; Liu, P.; Wang, S.; Tan, X. A piecewise mirror extension local mean decomposition method for denoising of near-infrared spectra with uneven noise. Chemom. Intell. Lab. 2022, 230, 104655. [Google Scholar] [CrossRef]
- Emeksiz, C.; Tan, M. Multi-step wind speed forecasting and Hurst analysis using novel hybrid secondary decomposition approach. Energy 2022, 238, 121764. [Google Scholar] [CrossRef]
- Liang, J.; Wang, L.; Wu, J.; Liu, Z.; Yu, G. Elimination of end effects in LMD by Bi-LSTM regression network and applications for rolling element bearings characteristic extraction under different loading conditions. Digit. Signal Process 2020, 107, 102881. [Google Scholar] [CrossRef]
- Li, Q.; Liang, S.; Song, W. Revision of Bearing Fault Characteristic Spectrum Using LMD and Interpolation Correction Algorithm. Procedia CIRP 2016, 56, 182–187. [Google Scholar] [CrossRef]
- Canovas, J.S. Topological entropy bounds multiscale entropy. Topol. Appl. 2023, 338, 108647. [Google Scholar] [CrossRef]
- Jiang, Y.; Yang, W.; Zhu, Y.; Hong, L. Entropy structure informed learning for solving inverse problems of differential equations. Chaos Solitons Fractals 2023, 175, 114057. [Google Scholar] [CrossRef]
- Richman, J.S.; Lake, D.E.; Moorman, J.R. Sample entropy. Methods Enzymol. 2004, 384, 172–184. [Google Scholar]
- Zhu, J.; Bai, W.; Zhao, J.; Zuo, L.; Zhou, T.; Li, K. Variational mode decomposition and sample entropy optimization based transformer framework for cloud resource load prediction. Knowl.-Based Syst. 2023, 280, 111042. [Google Scholar] [CrossRef]
- Liu, Z.; Liu, H. A novel hybrid model based on GA-VMD, sample entropy reconstruction and BiLSTM for wind speed prediction. Measurement 2023, 222, 113643. [Google Scholar] [CrossRef]
- Li, X.; Fu, L. Rolling bearing fault diagnosis based on MEEMD sample entropy and SSA-SVM. J. Phys. Conf. Ser. 2021, 2125, 012003. [Google Scholar] [CrossRef]
- Zhang, D.; Ren, X.; Zuo, H. Compound Fault Diagnosis for Gearbox Based Using of Euclidean Matrix Sample Entropy and One-Dimensional Convolutional Neural Network. Shock. Vib. 2021, 2021, 6669006. [Google Scholar] [CrossRef]
- Yuan, X.; Sun, Q.; Zhang, L.; Wang, H. Enhancing detection of SSVEP-based BCIs via a novel CCA-based method. Biomed. Signal Proces. 2022, 74, 103482. [Google Scholar] [CrossRef]
- Imrani, L.; Boudaoud, S.; Laforêt, J.; Kinugawa, K. Ageing Effect Evaluation on HD-sEMG Signals Using CCA Approach. IRBM 2021, 42, 294–299. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Gear Type | Canonical Correlation | |||||
|---|---|---|---|---|---|---|
| PF1 | PF2 | PF3 | PF4 | PF5 | u5(t) | |
| normal | 0.685 | 0.593 | 0.186 | 0.019 | 0.00023 | 0.00011 |
| broken teeth | 0.792 | 0.526 | 0.238 | 0.021 | 0.00017 | 0.00006 |
| wear | 0.612 | 0.624 | 0.195 | 0.012 | 0.00030 | 0.00017 |
| broken teeth + wear | 0.801 | 0.496 | 0.156 | 0.024 | 0.00013 | 0.00014 |
| Type | Normal | Broken Teeth | Wear | Broken Teeth + Wear | |
|---|---|---|---|---|---|
| linear kernel function | training time | 0.321 s | 0.332 s | 0.340 s | 0.343 s |
| precision | 90% | 70% | 80% | 80% | |
| Polynomial kernel function | training time | 0.364 s | 0.373 s | 0.387 s | 0.382 s |
| precision | 90% | 80% | 80% | 90% | |
| RBF kernel function | training time | 0.431 s | 0.457 s | 0.463 s | 0.475 s |
| precision | 100% | 100% | 100% | 100% | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, L.; Li, W.; Zhang, B.; Zhu, Y.; Lang, C. Fault Diagnosis of Mine Truck Hub Drive System Based on LMD Multi-Component Sample Entropy Fusion and LS-SVM. Actuators 2023, 12, 468. https://doi.org/10.3390/act12120468
Xu L, Li W, Zhang B, Zhu Y, Lang C. Fault Diagnosis of Mine Truck Hub Drive System Based on LMD Multi-Component Sample Entropy Fusion and LS-SVM. Actuators. 2023; 12(12):468. https://doi.org/10.3390/act12120468
Chicago/Turabian StyleXu, Le, Wei Li, Bo Zhang, Yubin Zhu, and Chaonan Lang. 2023. "Fault Diagnosis of Mine Truck Hub Drive System Based on LMD Multi-Component Sample Entropy Fusion and LS-SVM" Actuators 12, no. 12: 468. https://doi.org/10.3390/act12120468
APA StyleXu, L., Li, W., Zhang, B., Zhu, Y., & Lang, C. (2023). Fault Diagnosis of Mine Truck Hub Drive System Based on LMD Multi-Component Sample Entropy Fusion and LS-SVM. Actuators, 12(12), 468. https://doi.org/10.3390/act12120468