1. Introduction
Humans can grasp and manipulate objects of a wide range of sizes, weights, and shapes by using fingers dextrously and adaptively. Various industrial automation applications require safely, reliably, and robustly controllable robotic grasping and manipulation technologies that are closer to human hand dexterity [
1] and also excel over human capabilities [
2] (e.g., the lifting of a heavy-weight object, highly repeatable accurate gripping, and very fast gripping). In the past several decades, various robotic gripping technologies have been developed to produce such grasping dexterity and capabilities. Among these, robotic claws stand out as effective robot grippers due to their straightforward design, offering powerful and precise grips. They excel in performing delicate maneuvers in diverse industrial settings, including assembly, pick-and-place operations, and packaging and palletizing tasks. Also, robotic claws can be used for grasping instruments from spacecraft in space [
3] and satellite or space debris removal [
4]. Also, they can grasp marine life samples from submarines in the ocean [
5]. Generally, robotic claws are designed with a minimum of two fingers that converge from opposing sides to securely grasp an object [
6]. Conventional robotic fingers have been mainly made of low elastic compliance materials and are suitable for tightly grasping stiff material objects or power-gripping heavier objects. But, more recently, soft fingers that are made of highly elastic compliance materials have been actively developed to build robotic claws for handling and manipulating fragile or delicate objects and also being suitable to safely operate with humans [
7,
8]. Lately, there have been advancements in the development of adaptive magnetorheological fluid (MRF)-based robotic claws capable of dynamically altering their contact compliances by adjusting a magnetic field. MRF-based robotic claws offer distinct advantages compared to traditional electric and pneumatic claws. The inclusion of adaptively adjustable elastic compliance components enables MRF-baed robotic claws to grasp objects of diverse shapes and sizes without requiring prior information about the objects. Also, these claws can delicately grip soft and fragile targets without the need for extensive sensors and intricate control algorithms.
In investigations concerning MRF-based robotic claws, Pettersson et al. [
9] pioneered the development of a two-finger MRF-based robotic claw designed for the delicate handling of diverse-shaped food products. They utilized partially MRF-filled soft polyurethane bladders affixed to electromagnets (EMs) surfaces. The two-finger MRF-based robotic claw’s holding capabilities were evaluated using a benchtop material testing machine with various wood target objects in different shapes and sizes. Subsequently, the claw was integrated onto a six-axis KUKA robot, successfully executing pick-and-place tests for real foods like tomatoes, carrots, strawberries, broccoli, and grapes without causing damage. Liu et al. [
10] introduced a conceptual design for a two-joint robotic finger utilizing MRF, conducting analytical investigations into its grasping torque. Nishida et al. [
11] and the same authors in subsequent works [
12,
13] developed MRF-based universal grippers capable of grasping a broad spectrum of objects without relying on a claw or jaw mechanism. Bernat et al. [
14] devised a two-finger magnetorheological elastomer (MRE)-based robotic claw tailored for soft robotic applications. Guan et al. [
15] contributed to the field by creating a two-finger soft robotic claw using a 3D-printed hybrid magnetorheological (MR) material, encapsulating an MRF within an MRE matrix. More recently, the same authors [
16] assembled a two-finger MRF-based robotic claw employing a conventional EM, evaluating its holding performance through experimental assessments. To gauge the claw’s performance, a set of criteria including dynamic and static holding forces, controllable holding forces, and holding coefficients were proposed and experimentally measured.
In our previous study [
16], round-type conventional EMs were used to activate the stiffening of the MRF, thereby controlling the contact compliance of the MRF-based robotic claw. But, conventional EMs that consist of a coil winding, inner magnetic core, and outer magnetic flux return cannot be continuously operated for a long period of time because of heating up. Because of this fact, the grasping and manipulation operation of the MRF-based robotic claw using the conventional EM should be temporary and also limited to a short period of operating time. To overcome this disadvantage of the MRF-based robotic claw using the conventional EM developed in the previous study, the electro-permanent magnet (EPM) technology is applied to construct the MRF-based robotic claw in this study.
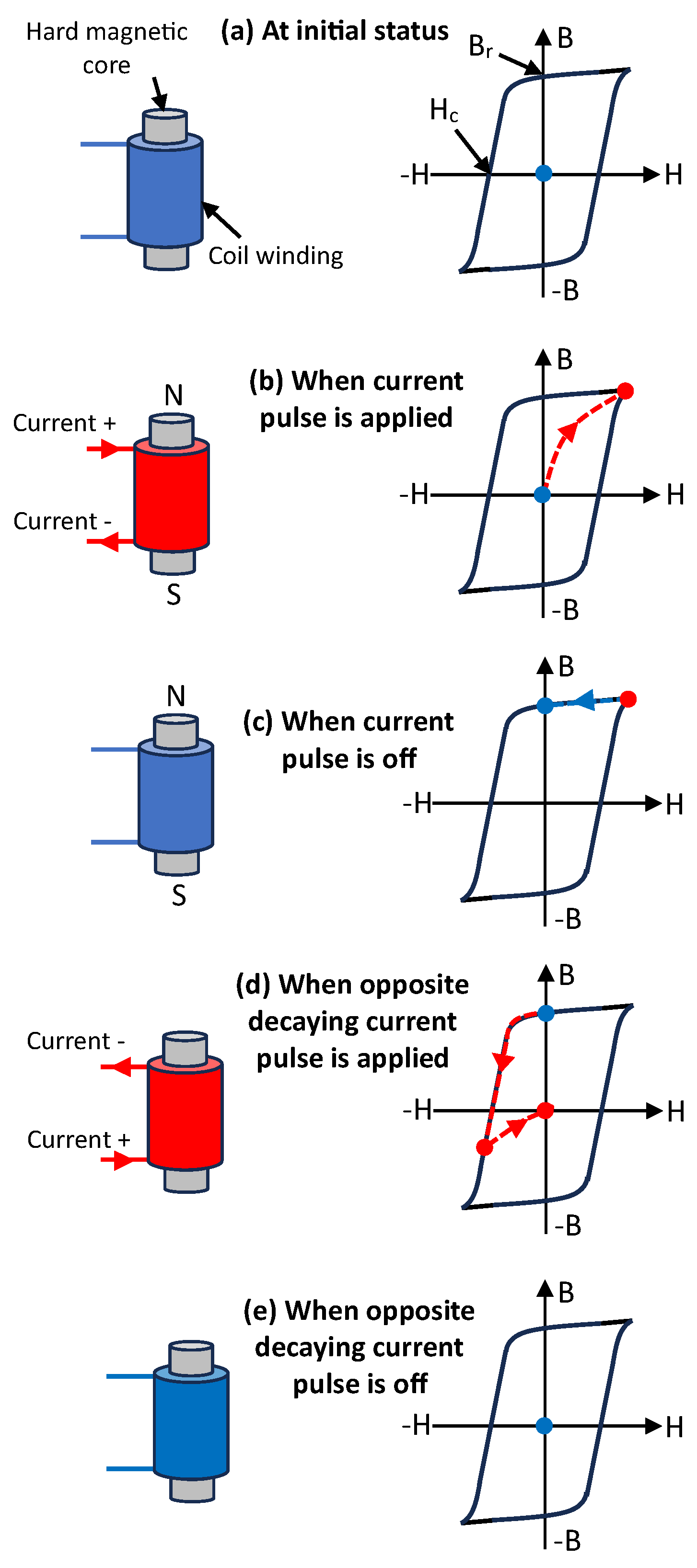
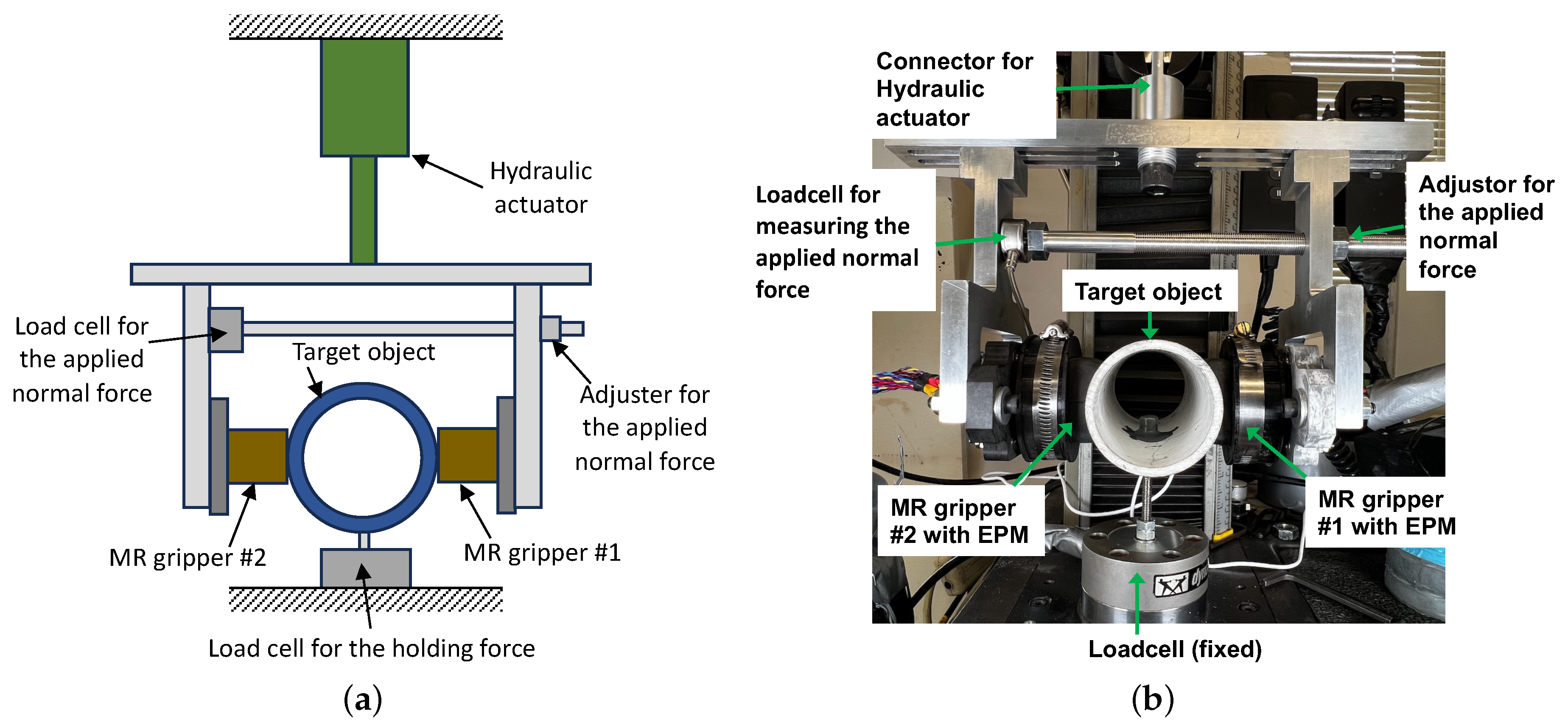
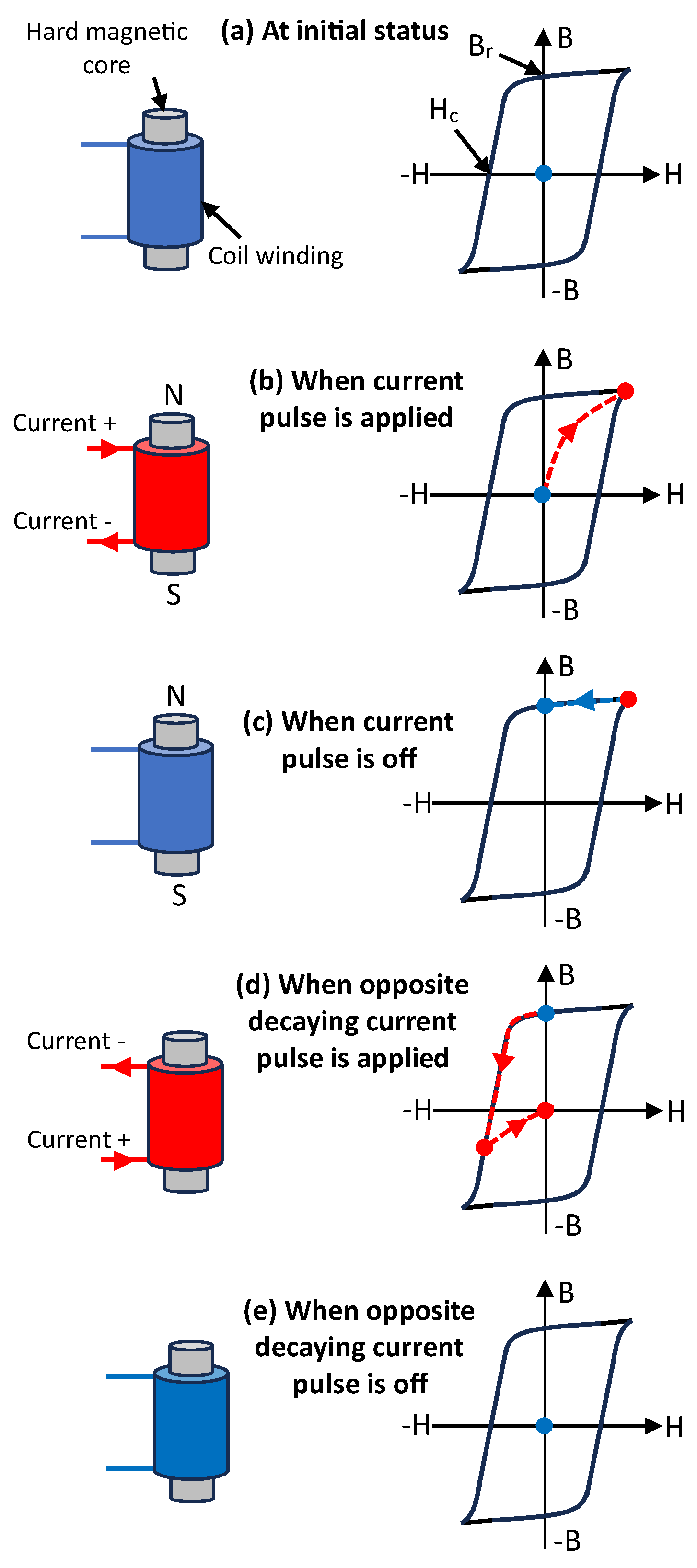
EPMs are known to be solid-state devices whose external magnetic flux can be stably switched on and off by a discrete electrical current pulse, and they retain their magnetic state with zero power. As a result, EPMs can provide a high magnetic field for a longer operating time with low power consumption and no heat-up issue. Thus, the development of an adaptive MRF-based robotic claw energized by the EPMs is addressed in this study. To this end, a two-finger type of MRF-based robotic claw was selected in this study. Two MR grippers that consisted of MRE bladders and EPM arrays were configured at the fingertips of the MRF-based robotic claw. A target object was positioned between these two MR grippers and secured by modifying the normal force applied to the object through the MR grippers. At this time, the contact compliances of the MR grippers were changed by activating the EPM arrays in three different operation modes: passive, short-range, and long-range. Because of those adaptive contact compliance characteristics, the holding forces of the MRF-based robotic claw were also changed by a magnetic field produced by the EPM arrays. By using the testing setup constructed on the Instron material testing machine, the holding performances of the MRF-based robotic claw with the EPM arrays were experimentally evaluated. From this work, the feasibility of the MRF-based robotic claw with the EPM arrays was experimentally confirmed.
3. Measured Holding Performances of the MRF-Based Robotic Claw
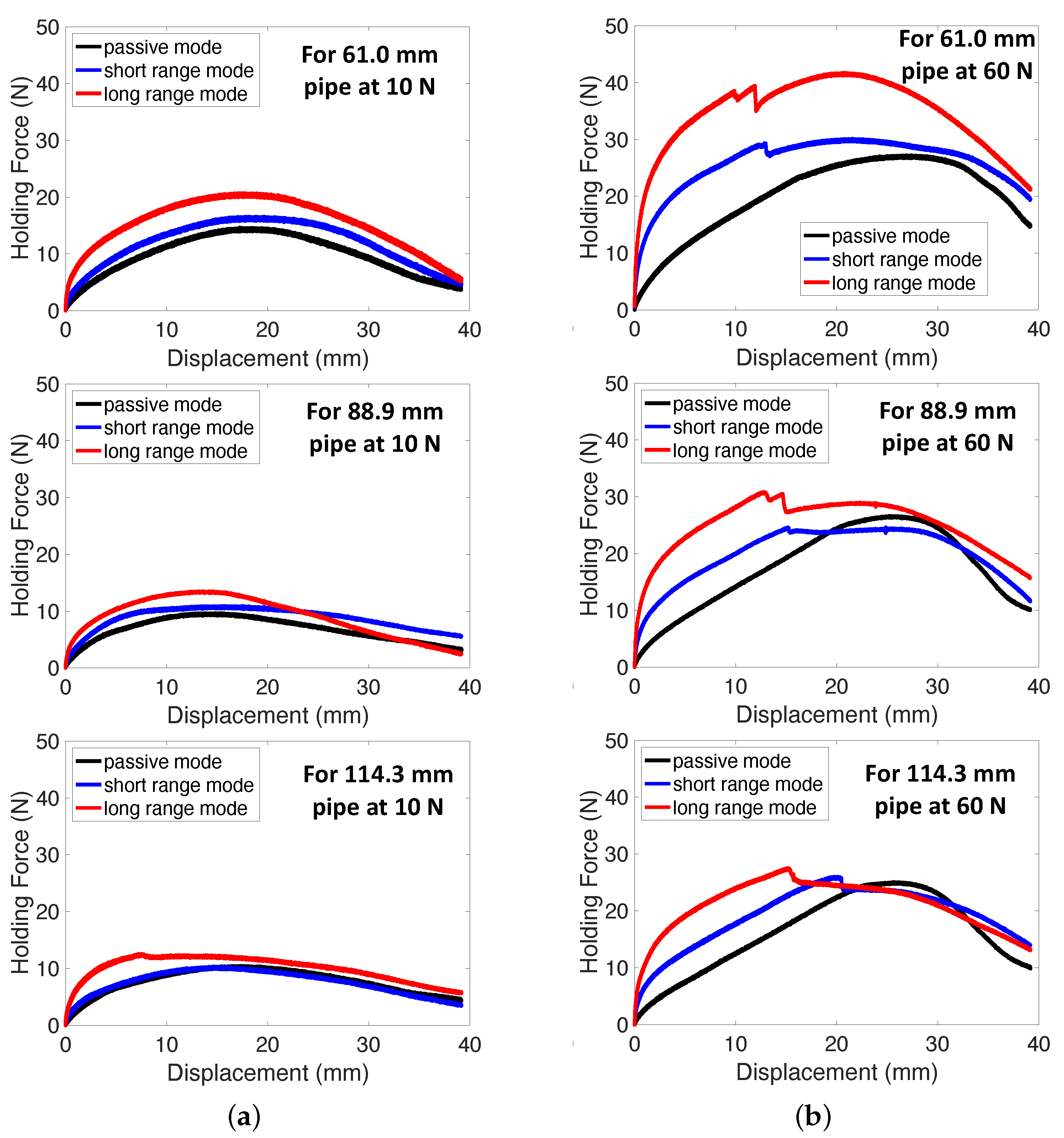
Figure 7 presents the measured holding forces of the MRF-based robotic claw with the EPM array versus the displacement at two different applied normal forces (i.e., 10 N and 60 N). As seen in this figure, the holding forces of the MRF-based robotic claw increased with the increased displacement. But, after a certain displacement point, the holding forces started to slowly decrease. The decline in holding forces resulted from the central sections of the MR grippers sliding up the center of the target object, causing a reduction in the contact area between the target object and the MRE bladders. In this study, the dynamic and static holding forces were used as the performance evaluation indices of the MRF-based robotic claw and were quantified via
Here,
is the dynamic holding force,
is the static holding force,
is the holding force, and
z is the vertical displacement of the MRF-based robotic claw, respectively. In this case,
mm for the dynamic holding force was selected as the maximum displacement, where the holding forces of all tested cases continuously increased without holding force jittering. Also,
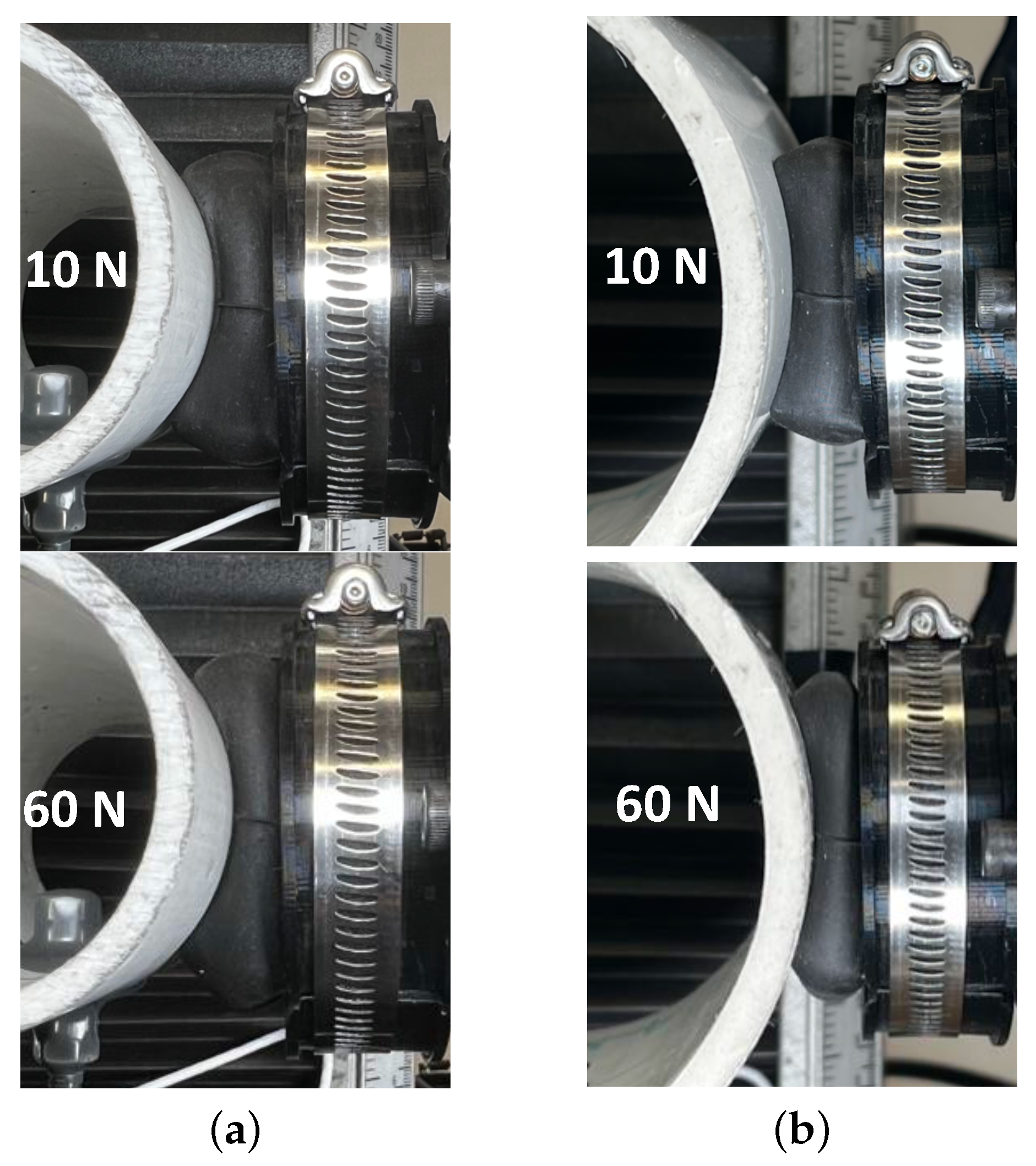
mm for the static holding force was selected by assuming the pick-and-placement accuracy of the MRF-based robotic claw. The dynamic holding force physically represents the maximum effective force exerted by the MRF-based robotic claw before the target object is released from its grip. On the other hand, the static holding force denotes the maximum effective force applied by the MRF-based robotic claw before the object begins to slip. It is important to highlight that the criteria for defining dynamic and static holding forces can be adjusted based on the intended purpose of employing the robotic claw. On the other hand, the holding forces of the MRF-based robotic claw were significantly changed by three different operation modes of the EPM array. The LR mode case could produce a higher holding force than the cases of the other operating modes. This phenomenon is because the magnetic flux in the LR mode could travel a longer distance from the top face of the EPM array than that in the SR mode. As a result, more portions of the MRF inside the bladders of the MR grippers could be energized by the EPM array in the LR mode than those in the SR mode. On the other hand, the applied normal force also significantly affected the holding forces of the MRF-based robotic claw. The holding forces of the MRF-based robotic claw at an applied normal force of 60 N were much larger than those at an applied normal force of 10 N. This is because the gripping action of the MRF-based robotic claw results from the friction between the bladders and the object. At an applied normal force of 10 N, the holding force difference between the three operating modes of the EPM array was small. But, at an applied normal force of 60 N, the holding force difference of the MRF-based robotic claw due to the three operating modes was relatively large. Also, these additional holding force increments by the SR and LR modes from the passive mode (i.e., no magnetic field) are due to the constraint of the hardened bladders of the MR grippers due to the MR effect. This can be observed from the photographs of the bladder shapes of the MRF-based robotic claw shown in
Figure 8. As seen in this figure, the bladder of the MR gripper was elastically deformed by the object’s shape. The deformed amounts of the bladder were dependent on the applied normal forces. The larger the applied normal force, the more the bladder was deformed. The bladder was pushed by the object at the condition where the center of the MR gripper was initially aligned with the center of the object, and thus the edges’ shapes of the bladder were almost symmetric from the bladder center, as shown in
Figure 8. Also, when the bladder was deformed, its center was closer to the top surface of the EPM array and its edges were bulged. Because of this phenomenon, some portions of the object can be entrapped inside the bladder, and the bulged edges of the bladder work as the constraint preventing the object to drop. If the bladder is hardened by the energized MRF, this constraint will be also strong, thereby considerably increasing the holding force of the MRF-based robotic claw from the passive mode case. Because of this fact, the SR and LR modes cases could produce greater holding forces than the passive mode case.
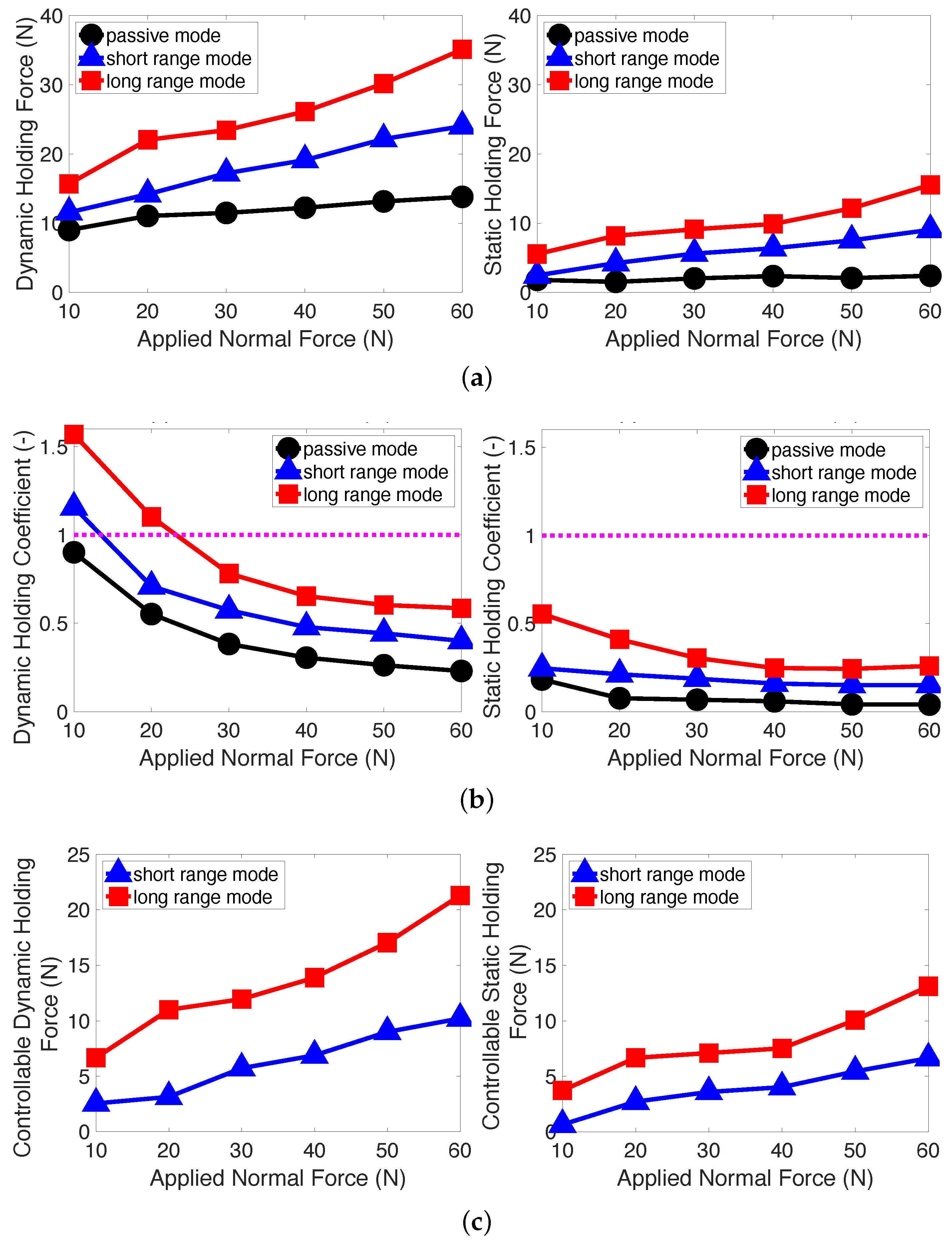
Figure 9 presents the holding performance of the MRF-based robotic claw with the EPM array versus the applied normal force for the 61.0 mm pipe. In this case, the dynamic and static holding forces were determined via the criteria of Equation (
1). Also, the dynamic and static holding coefficients were determined via
Here,
is the dynamic holding coefficient,
is the static holding coefficient, and
is the applied normal force. A higher holding coefficient indicates either improved holding force at the same applied normal force or the same holding force at a reduced applied normal force. Also, the controllable dynamic and static holding forces were determined via
Here,
is the controllable dynamic holding force and
is the controllable static holding force. Physically, the controllable dynamic and static holding forces mean the ranges of the additional dynamic and static holding forces that can be controlled by the SR and LR modes of the EPM array. As seen in
Figure 9a, the dynamic holding forces were much larger than the static holding forces because the dynamic holding forces were determined at the status where the MRF-based robotic claw slid up the object further. As expected, the applied normal force continuously increased the dynamic and static holding forces. At all the applied normal forces tested here, the LR mode case could produce larger dynamic and static holding forces than the SR mode case. The maximum dynamic and static holding forces in the LR mode occurred at an applied normal force of 60 N because the object was closer to the EPM array’s top surface and the contact curvature of the bladder was larger at a higher applied normal force, as already observed in
Figure 8a. The maximum dynamic and static holding forces at an applied normal force of 60 N were 35 N and 16 N, respectively. In the SR mode, the maximum dynamic and static holding forces also occurred at an applied normal force of 60 N, and they were 24 N and 9 N, respectively. In the passive mode, the maximum dynamic and static holding forces were 14 N and 2 N, respectively. On the other hand, as shown in
Figure 9b, the dynamic and static holding coefficients decreased with the increased applied normal forces. At the low applied normal forces of less than 20 N, the dynamic holding force in the LR mode was larger than 1. This physically means that the dynamic holding force of the robotic claw at an applied normal force of less than 20 N was larger than the applied normal force. Also, this can imply that the MRF-based robotic claw is able to grasp a wider range of delicate or fragile objects with less damage or bruises. The maximum dynamic and static holding coefficient occurred at an applied normal force of 10 N. This trend is the opposite of the trend of
Figure 9a. In the LR mode, the maximum dynamic and static holding coefficients were 1.6 and 0.6, respectively. In the SR mode, they were 1.2 and 0.25, respectively. In the passive mode, they were 0.9 and 0.2, respectively. On the other hand, the controllable dynamic and static holding forces almost linearly increased with the increased applied normal forces. Compared to the SR mode, the controllable dynamic and static holding forces in the LR mode were almost twice as large. The maximum controllable dynamic and static holding forces in the LR mode occurred at an applied normal force of 60 N, and they were 21 N and 14 N, respectively. In the SR mode, they were 10 N and 7 N, respectively.
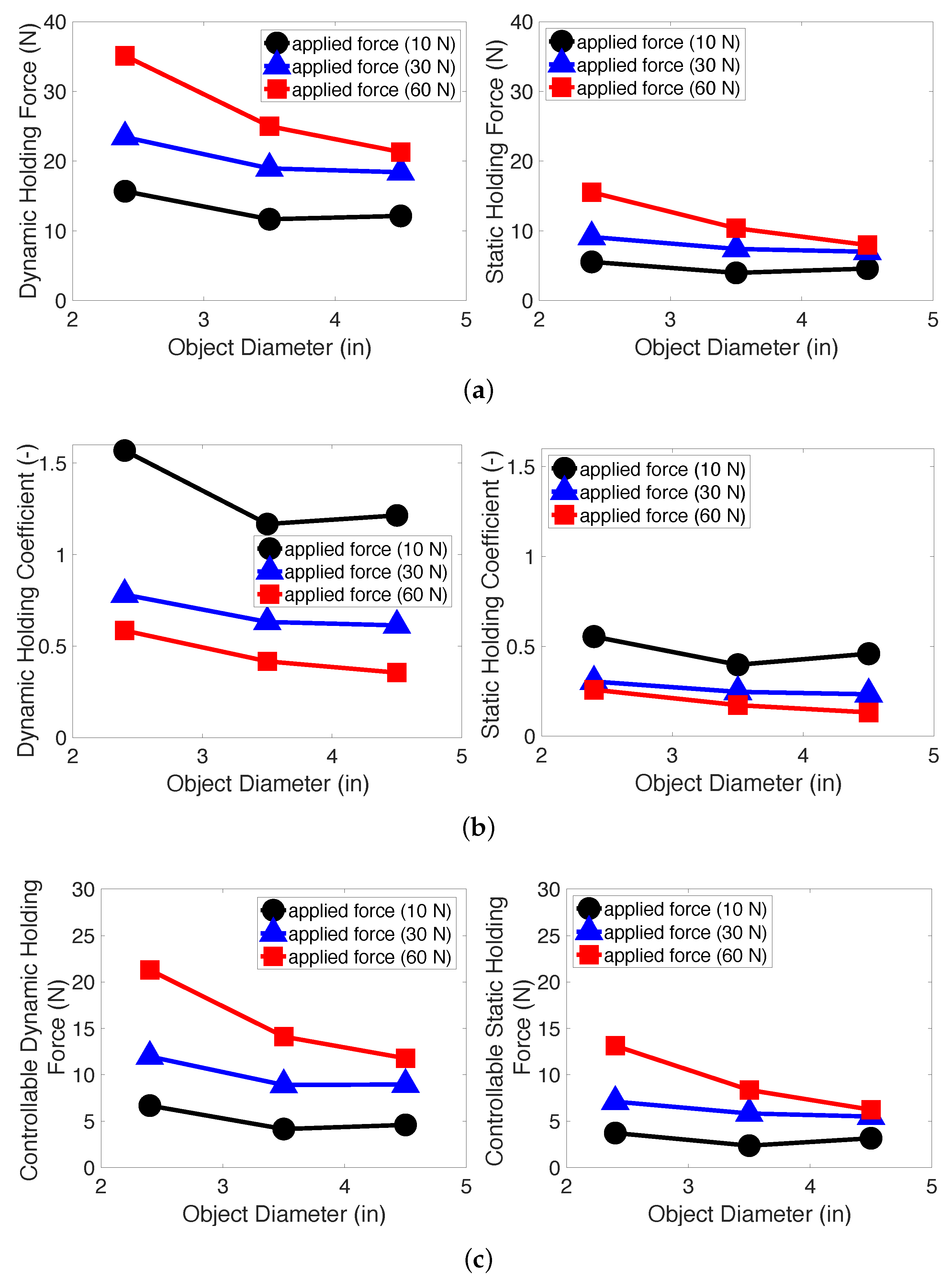
Figure 10 presents the holding performance of the MRF-based robotic claw with the EPM array in the LR mode versus the object size at three different applied normal forces (10 N, 30 N, and 60 N). As seen in
Figure 10a, the dynamic and static holding forces almost continuously decreased with the increased object diameter for almost all applied forces tested here. This phenomenon is because when the diameter of the object increased, the bulged edges and contact curvatures of the bladder became smaller, as already seen in
Figure 8. This can cause a decrease in the dynamic and static holding forces of the MRF-based robotic claw at a larger object diameter. At an applied normal force of 60 N, the dynamic and static holding forces for the 61.0 mm (2.4”) pipe were 35 N and 16 N, respectively. But, for the 114.3 mm (4.5”) pipe, the dynamic and static holding forces decreased to 21 N and 5 N, respectively. Similar to the trend of the dynamic and static holding forces in
Figure 10a, both the holding coefficients in
Figure 10b and the controllable holding forces in
Figure 10c also decreased with the increased object diameter for most of the applied normal force cases. At an applied normal force of 10 N, the dynamic and static holding coefficients for the 61.0 mm pipe were 1.6 and 0.6, respectively. For the 114.3 mm pipe, the dynamic and static holding coefficients decreased to 1.2 and 0.5, respectively. On the other hand, the controllable dynamic and static holding forces at an applied normal force of 60 N for the 61.0 mm pipe were 21 N and 13 N, respectively. For the 114.3 mm pipe, the controllable dynamic and static holding forces decreased to 12 N and 6 N, respectively.
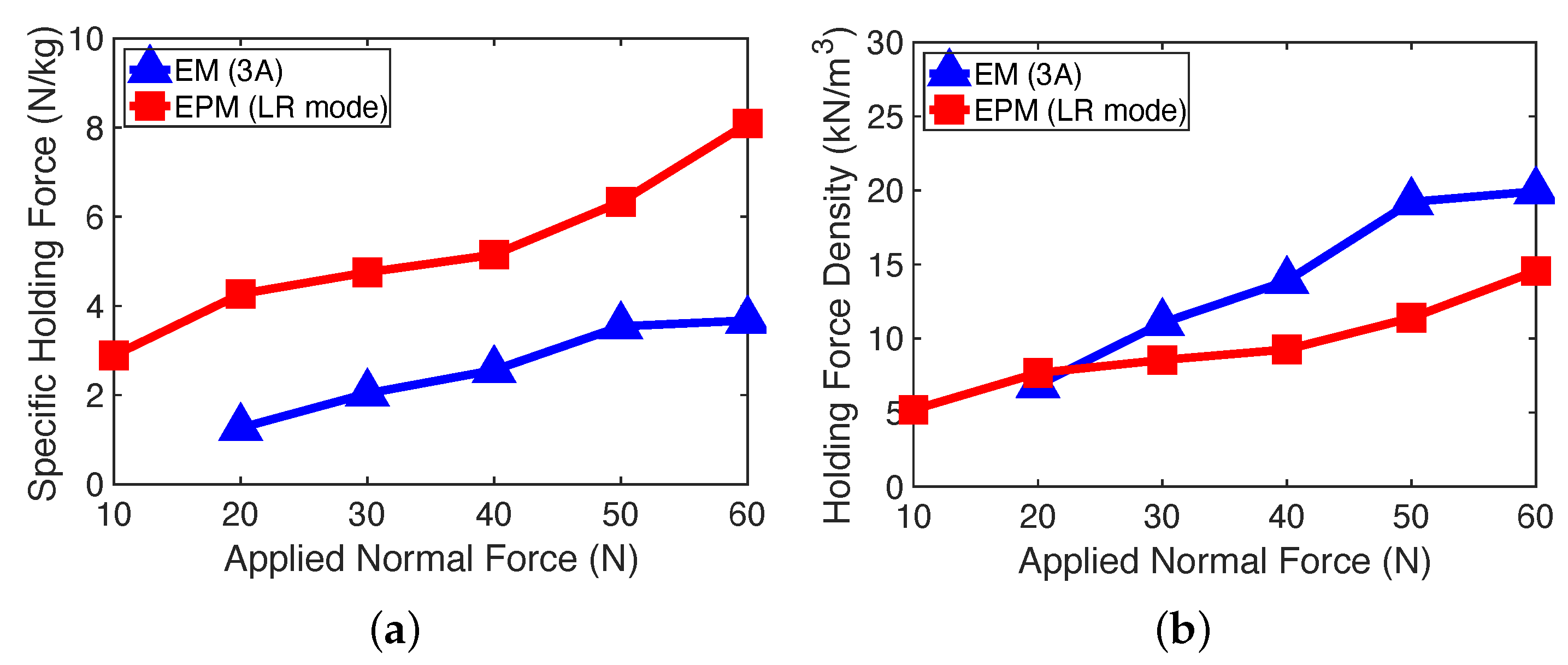
Figure 11 presents the comparison of the two different MRF-based robotic claws using the EM or the EPM array on the holding performance for the 61.0 mm pipe. First, as stated in the introduction, the holding performance of the MRF-based robotic claw using the conventional EM was reported in our prior study [
16]. But, because of different device sizes and operating configurations, a direct comparison between the two different MRF-based robotic claws cannot be conducted. But, in aerospace and other engineering fields where stringent mass and volume constraints are imperative, there is a pronounced demand for devices that are both lighter and smaller. In light of this requirement, the holding performances of two different MRF-based robotic claws were compared. To this end, the specific holding force and the holding force density are proposed in this study as follows:
Here,
is the specific holding force and
is the holding force density.
M and
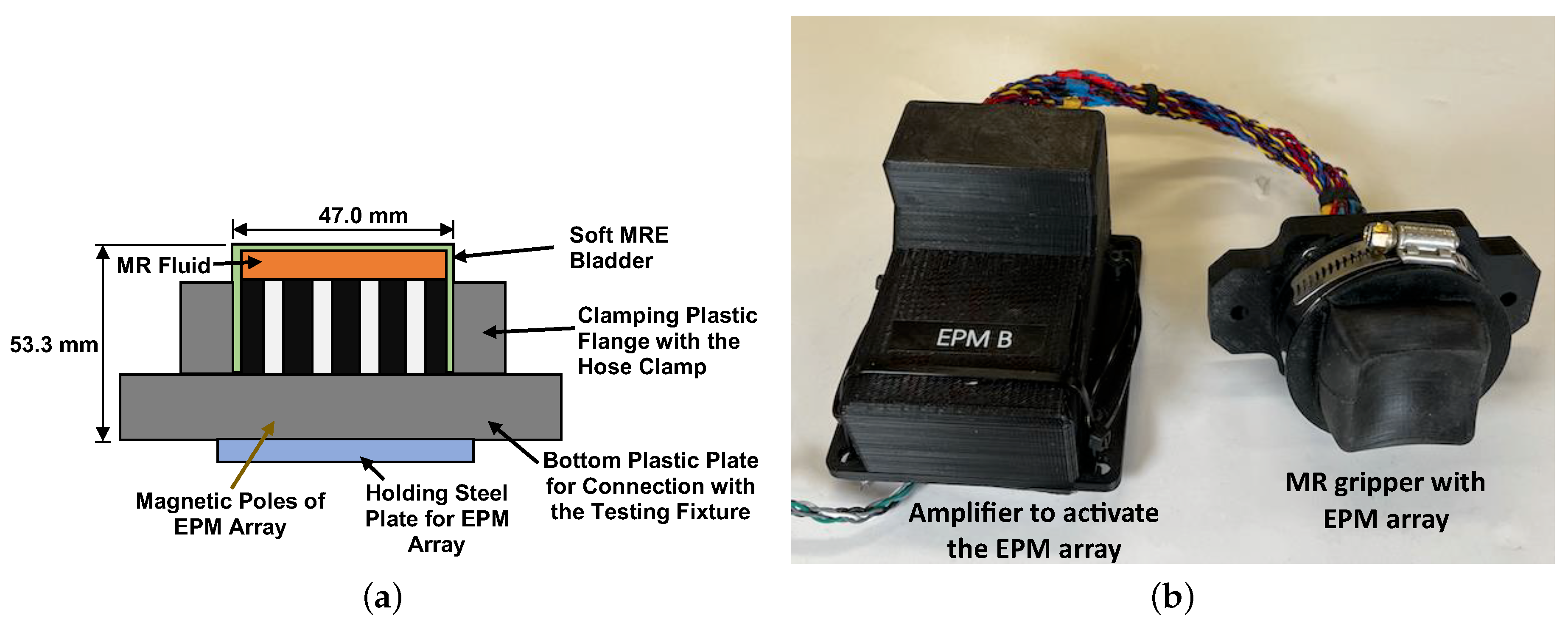
V are the mass and volume of the MR gripper, respectively. For the case of the MR gripper with the EPM array, the masses and volumes of both the MR gripper and the inhouse current amplifier (see
Figure 2b) to switch on and off the EPM array were considered. But, for the case of the MR gripper with the EM, a general-purpose, large, and hefty power supply was utilized. Thus, the mass and volume of this power supply were not factored into the determination of the specific holding force and holding force density. On the other hand, since the MRF-based robotic claws have two MR grippers, there is the number 2 in the denominator in Equation (
4). Instead of using the dynamic holding force, the static holding force was used to determine both the specific holding force and holding force density because the static holding forces of two different MRF-based robotic claws were determined at the same displacement of
z = 0.5 mm. As seen in
Figure 11a, the MRF-based robotic claw with the EPM array in the LR mode could produce a larger specific holding force than the MRF-based robotic claw with the EM at a constant current input of 3 A (that result was obtained from our previous study [
16]). But, for the holding force density shown in
Figure 11b, the MRF-based robotic claw with the EPM array was better than the MRF-based robotic claw with the EM. This can imply that the MRF-based robotic claw with the EPM array may be better for the application required for lighter device weight and the MRF-based robotic claw with the EM may be better for the application required for less device volume.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}