
Octopus-Inspired Robotic Arm Powered by Shape Memory Alloys (SMA)


Abstract
:1. Introduction
- We introduce a modular and lightweight bio-inspired robotics arm. The design is simple and emphasizes flexibility utilizing artificial muscles as actuators.
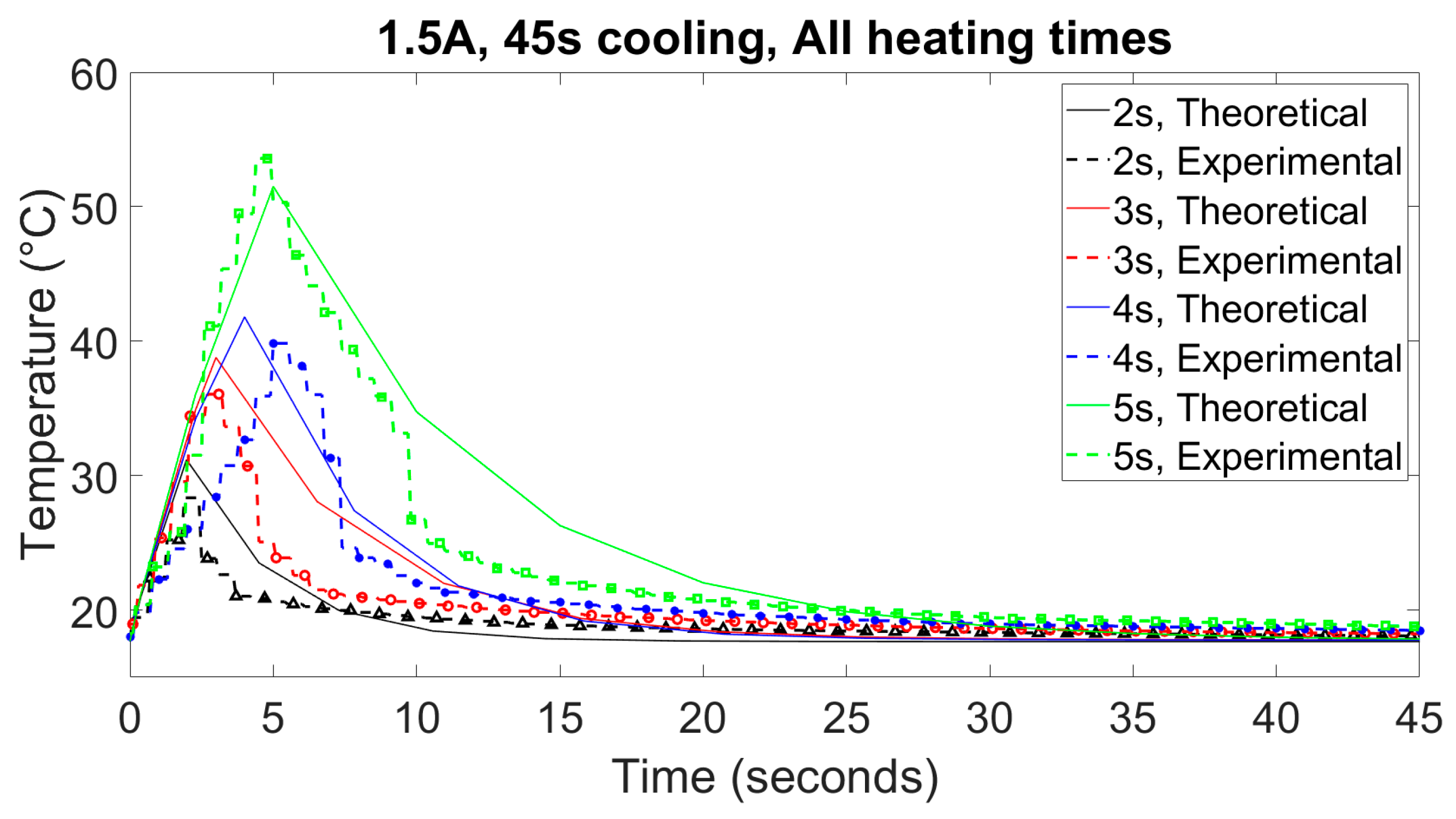
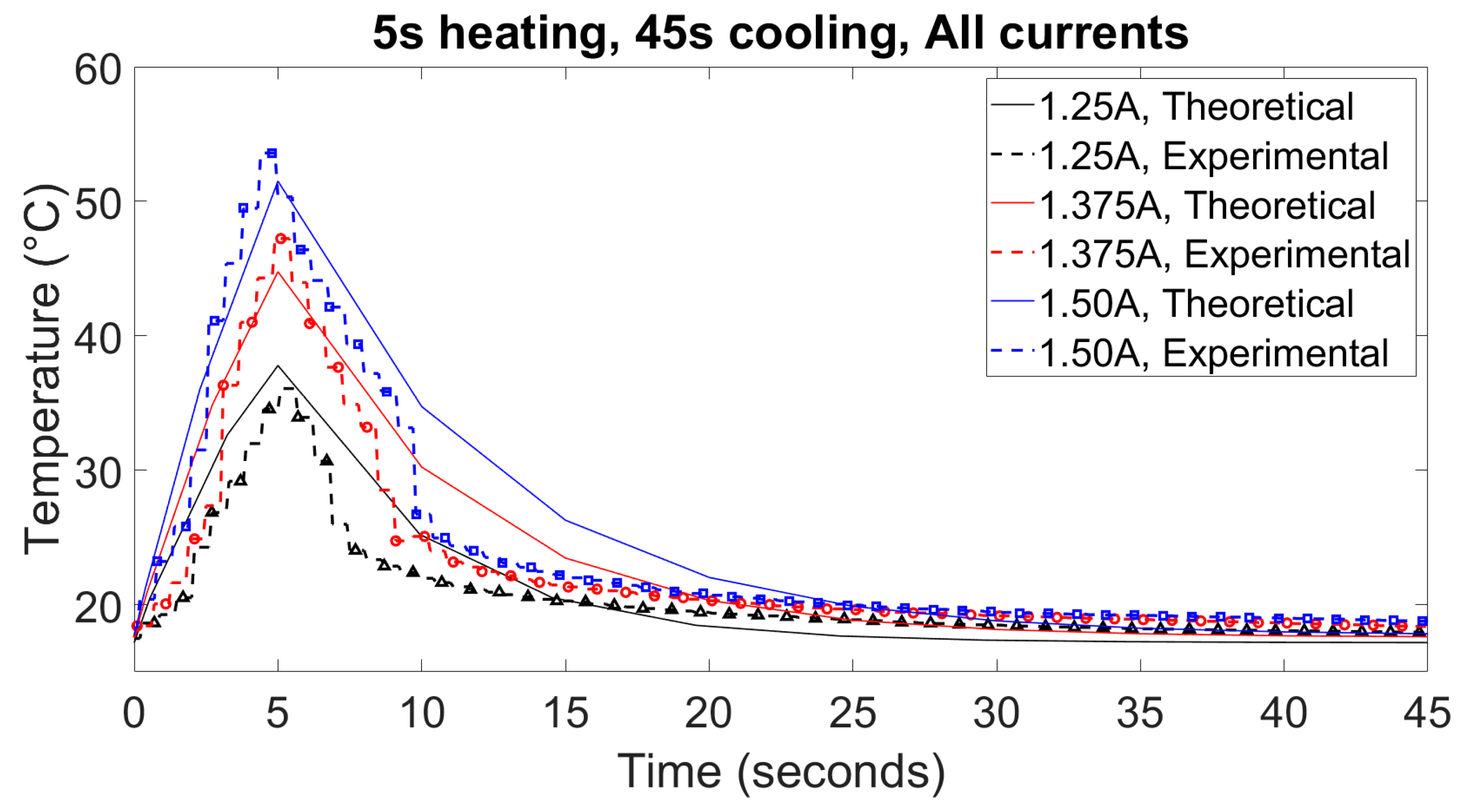
- We develop a predictive temperature model for the coiled SMAs when actuated in silicone. This model aids in studying the control behavior of the SMAs during operation.
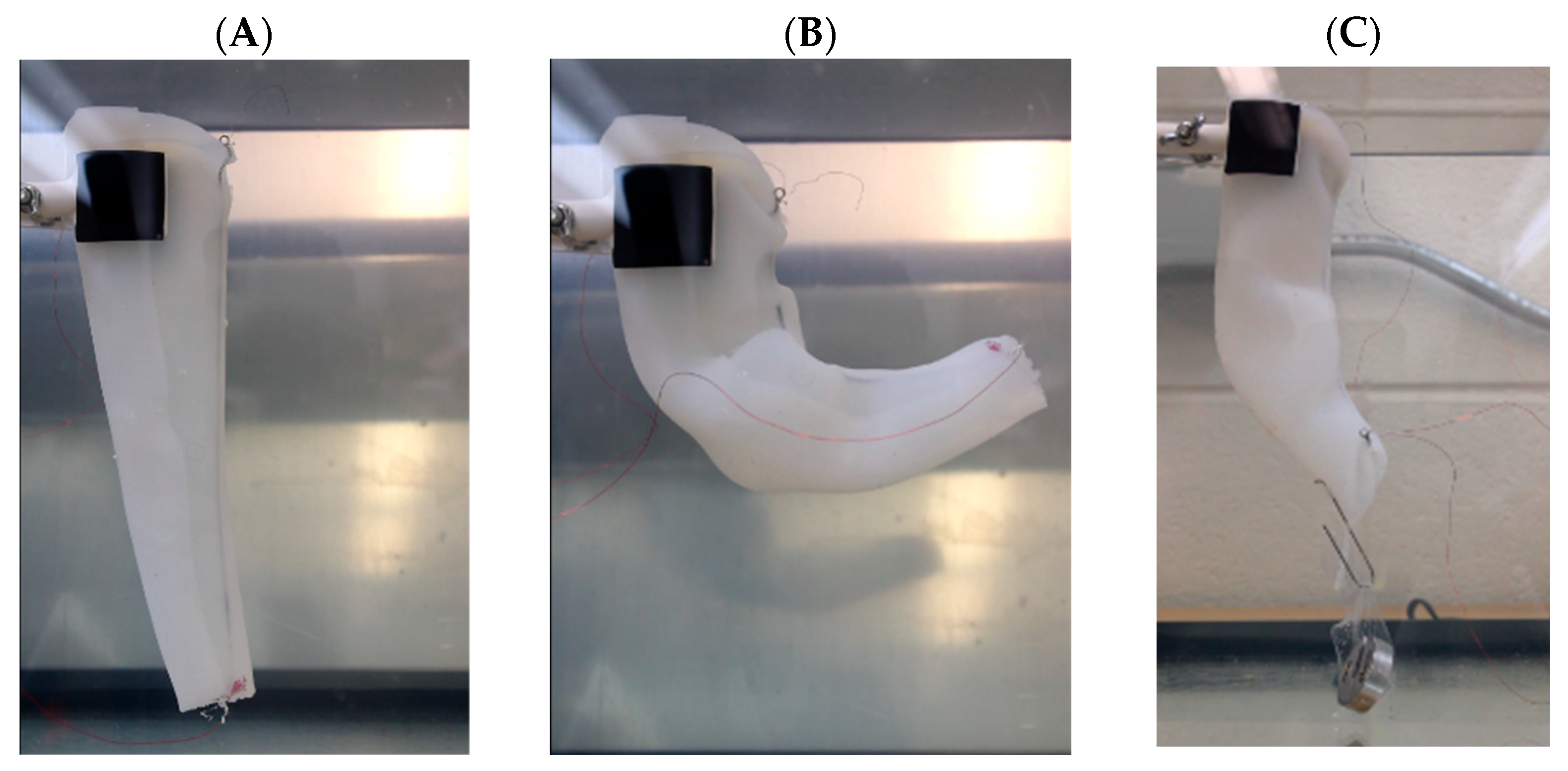
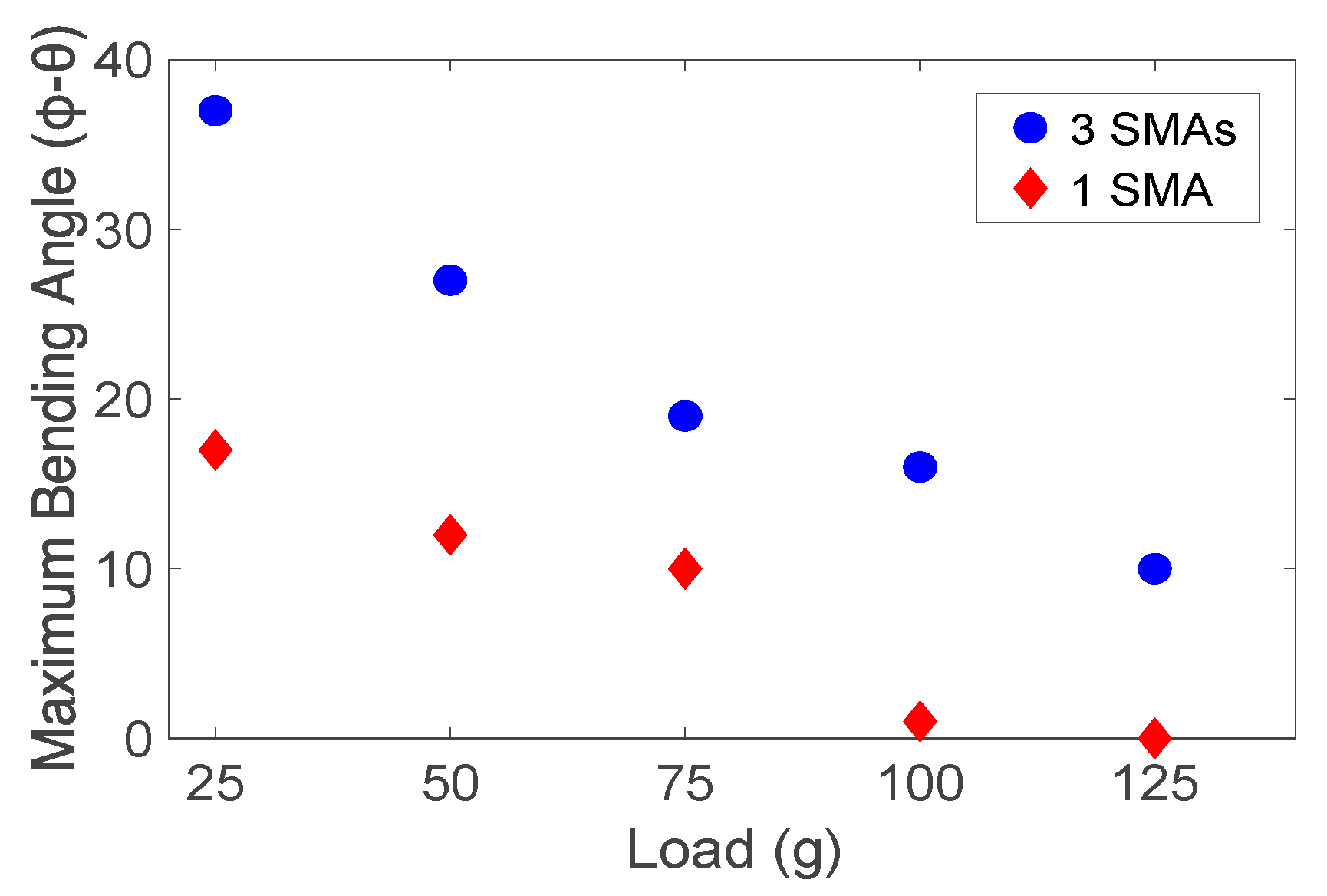
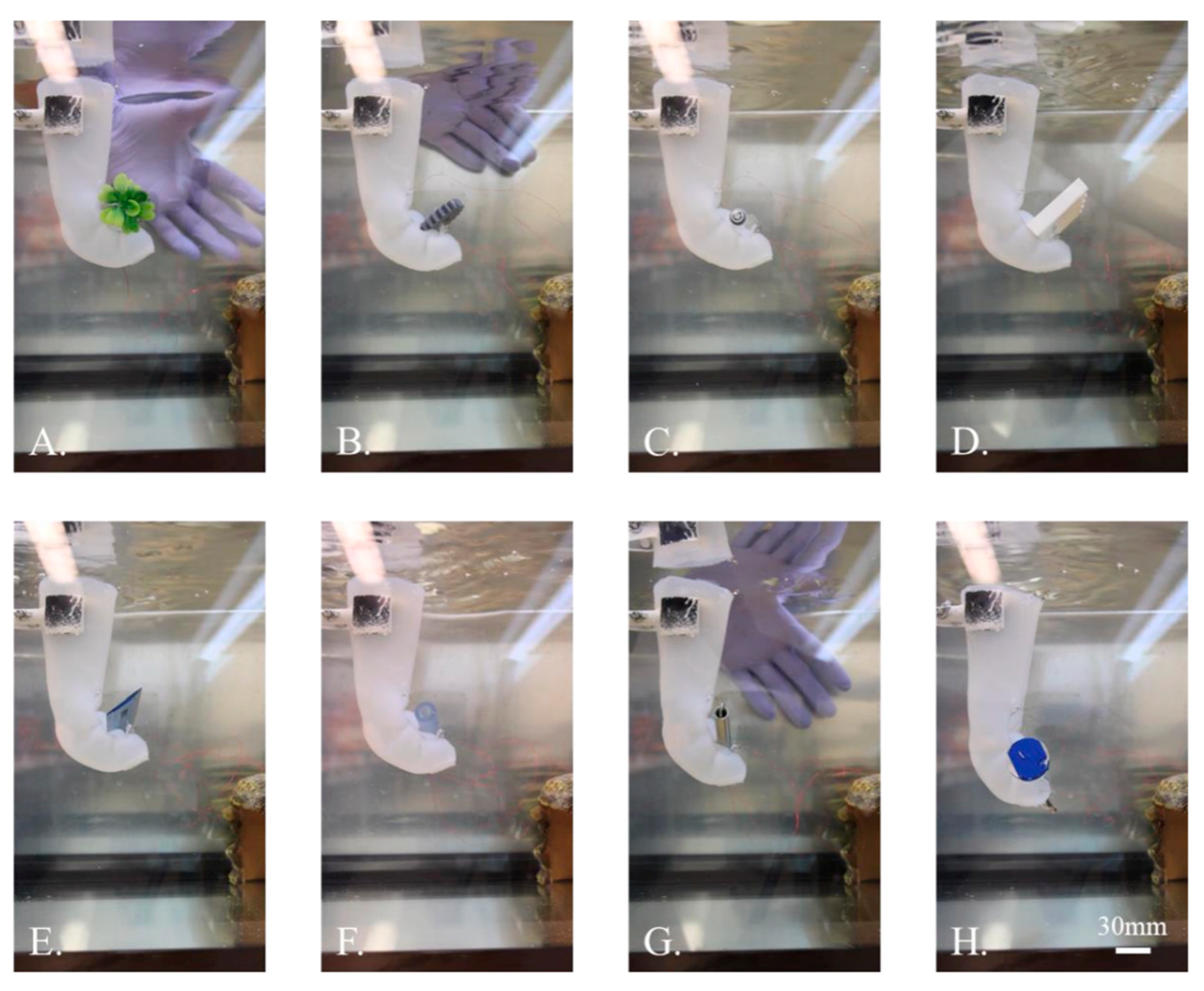
- Extensive actuation analyses reveal the arm’s capabilities, including controllable 2D and 3D bending, a lifting capacity of up to 125 g, and the ability to grasp and hold objects of diverse sizes and shapes.
2. Materials and Methods
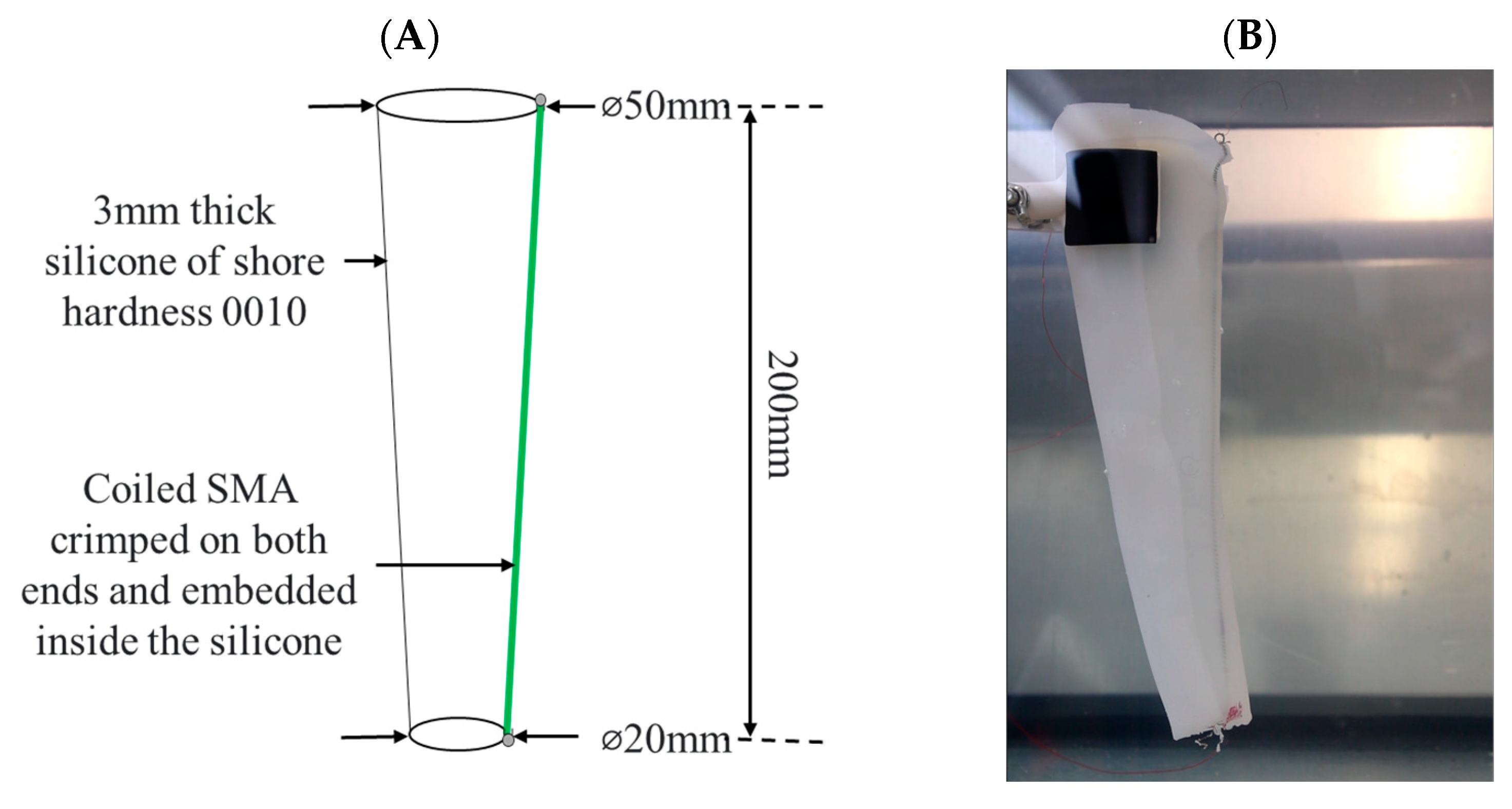
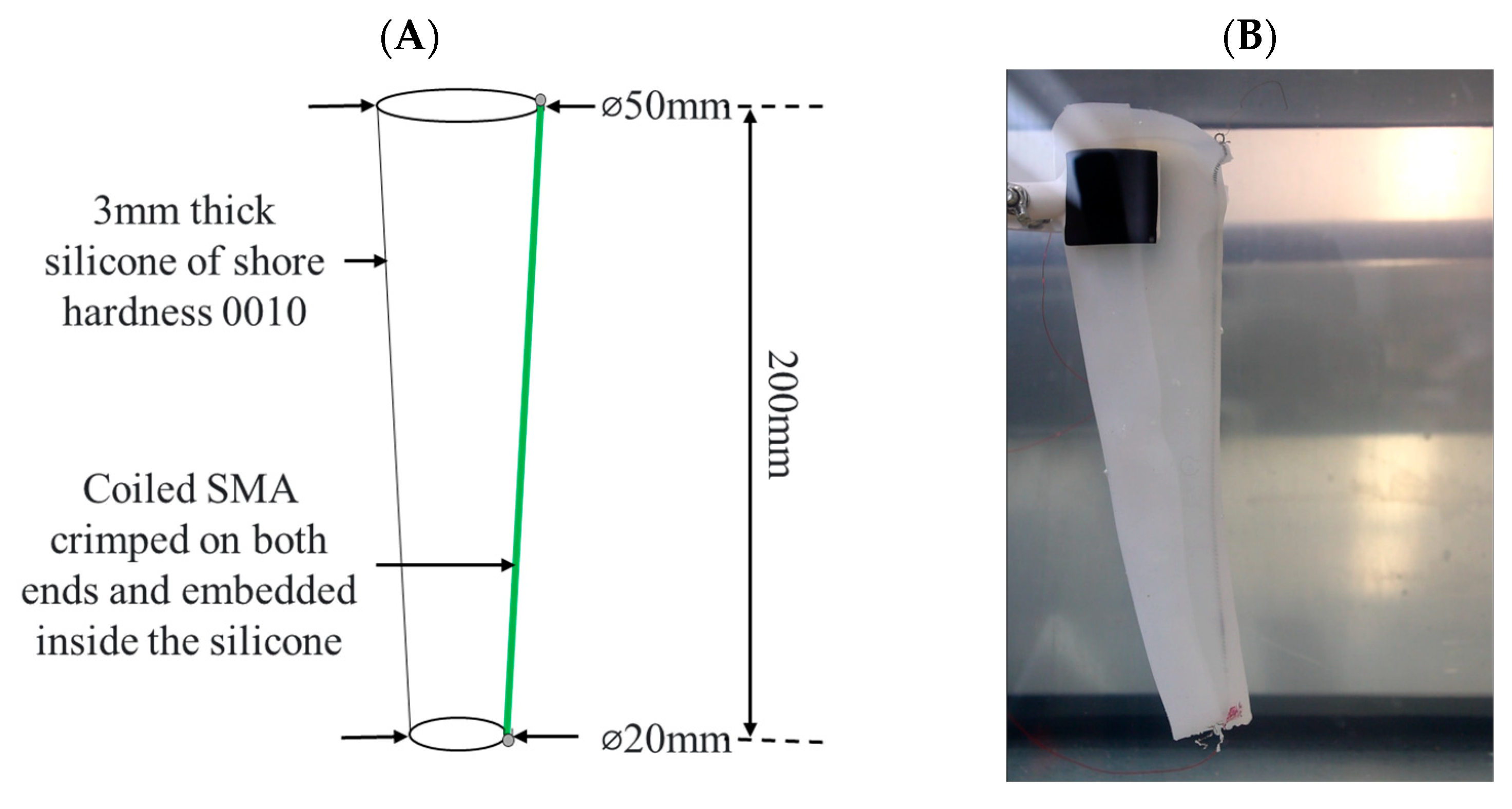
2.1. Design of the Silicone Arm with Embedded Coiled SMA
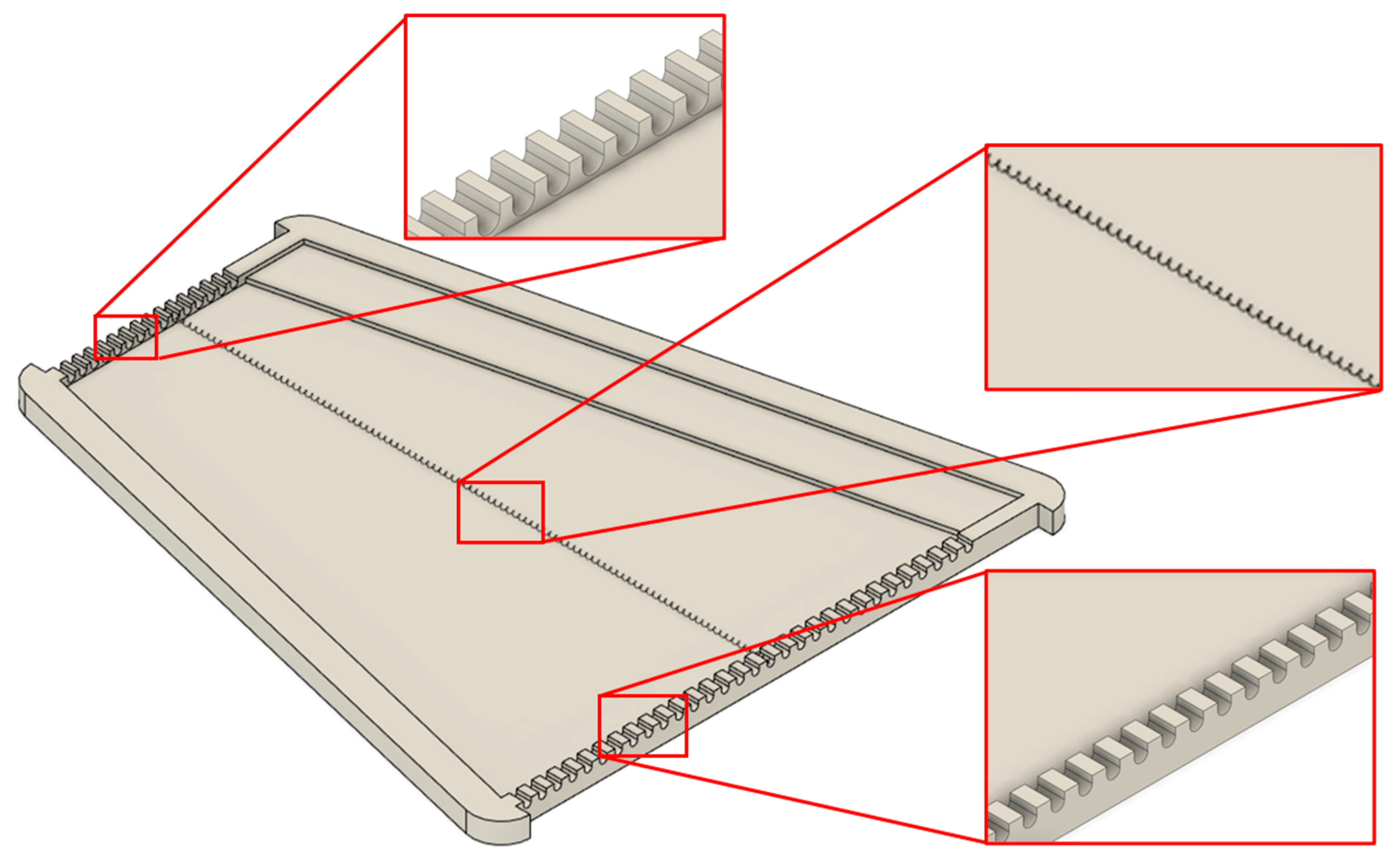
2.2. Fabrication Methods Used for Creating the Silicone Arm
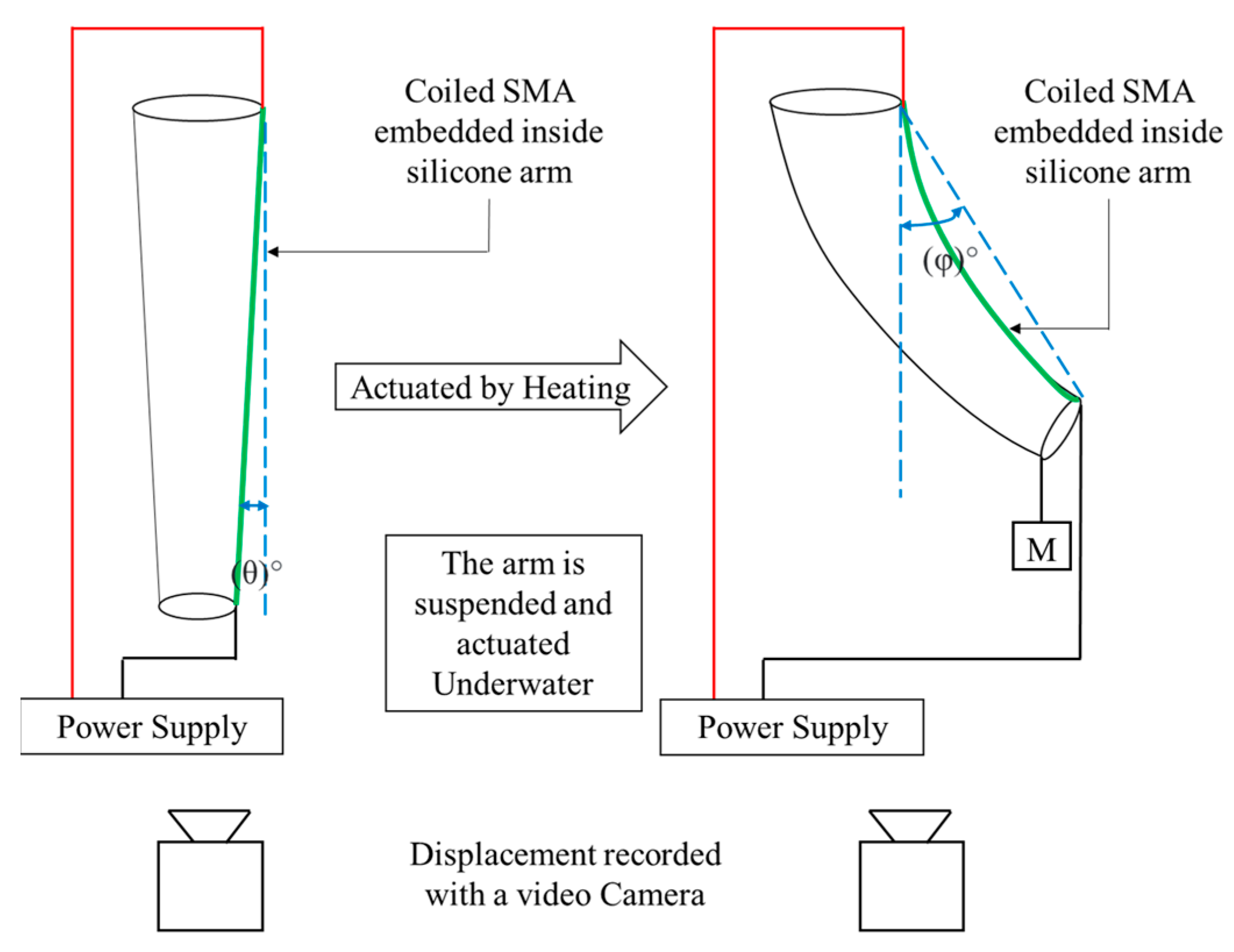
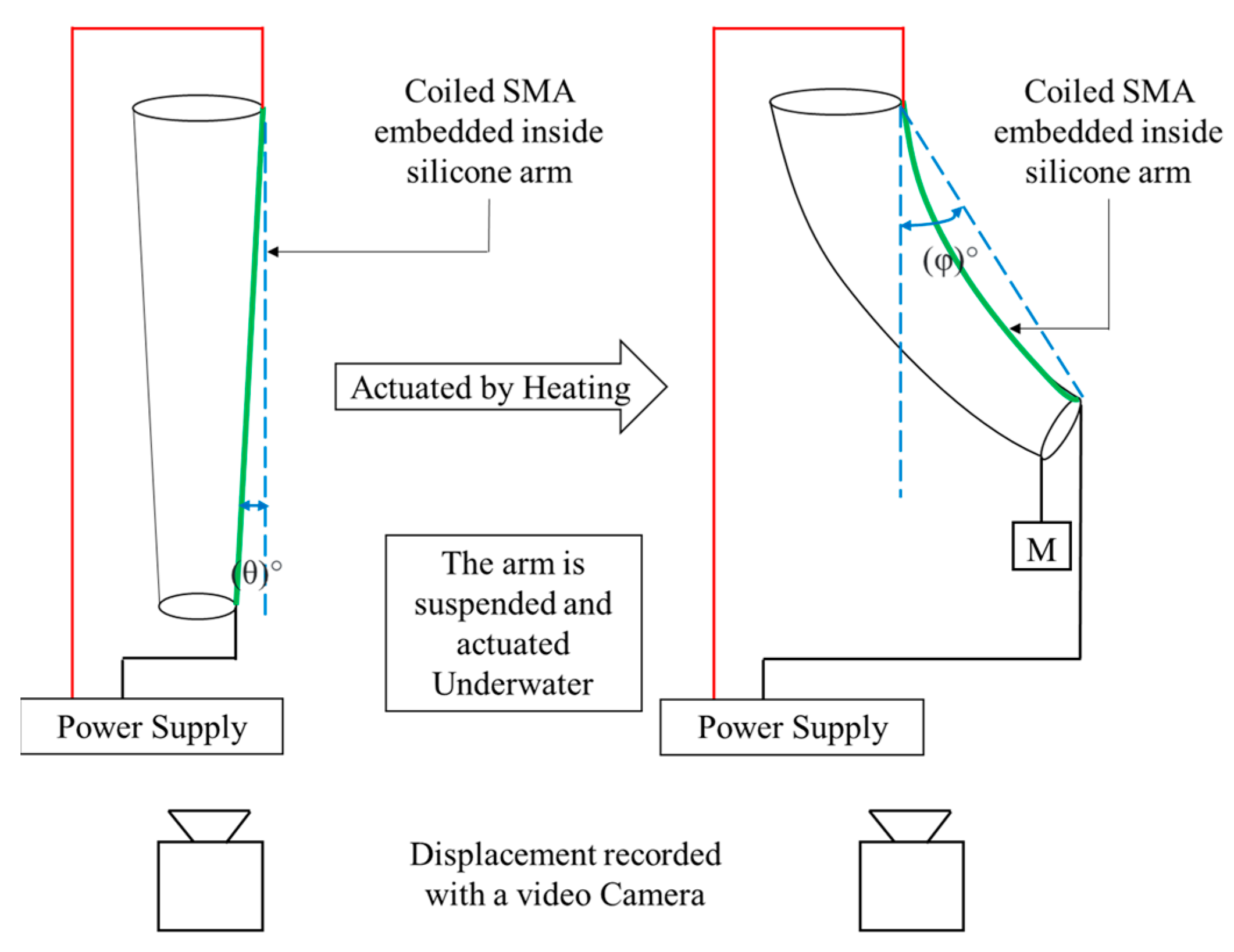
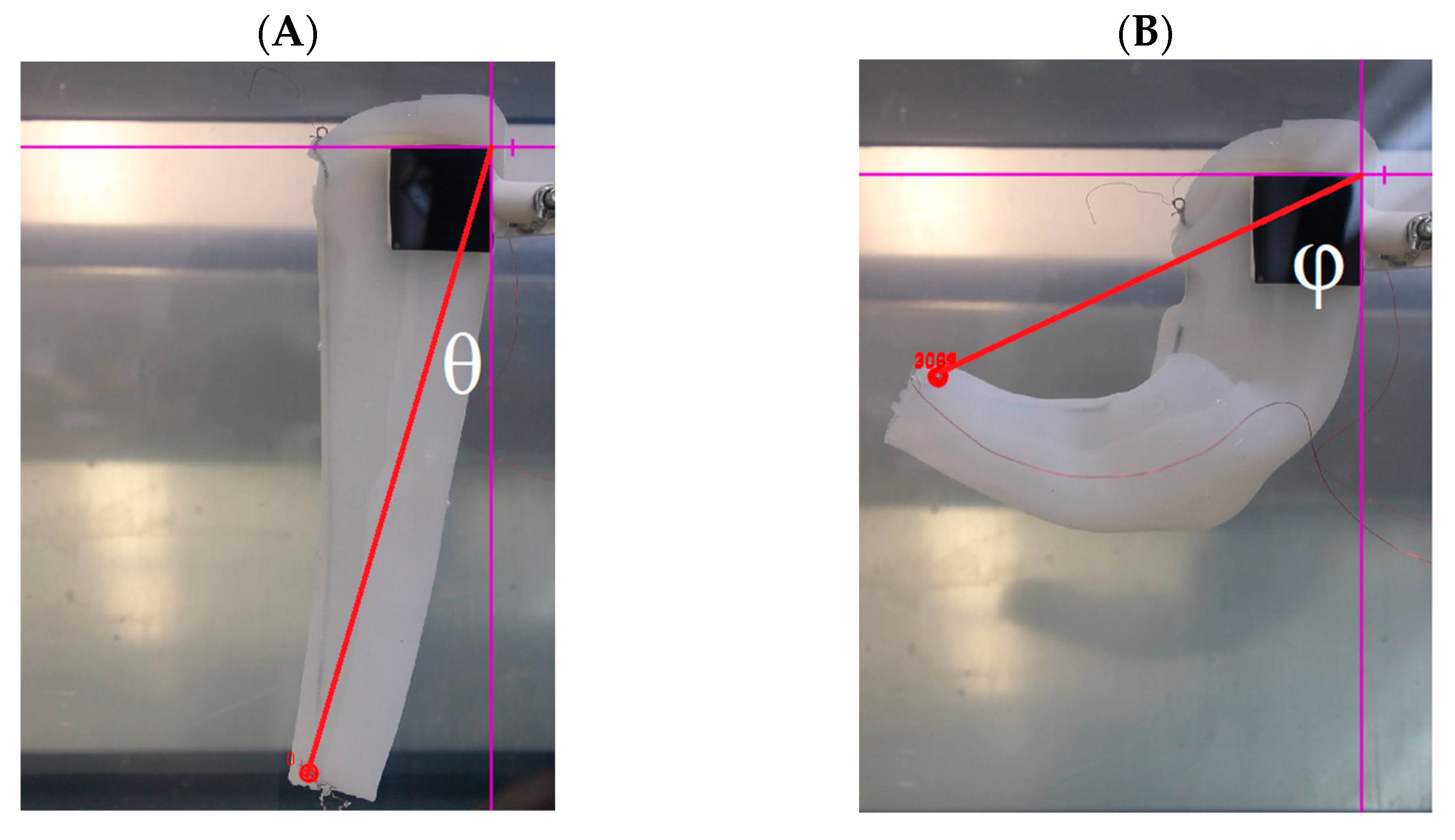
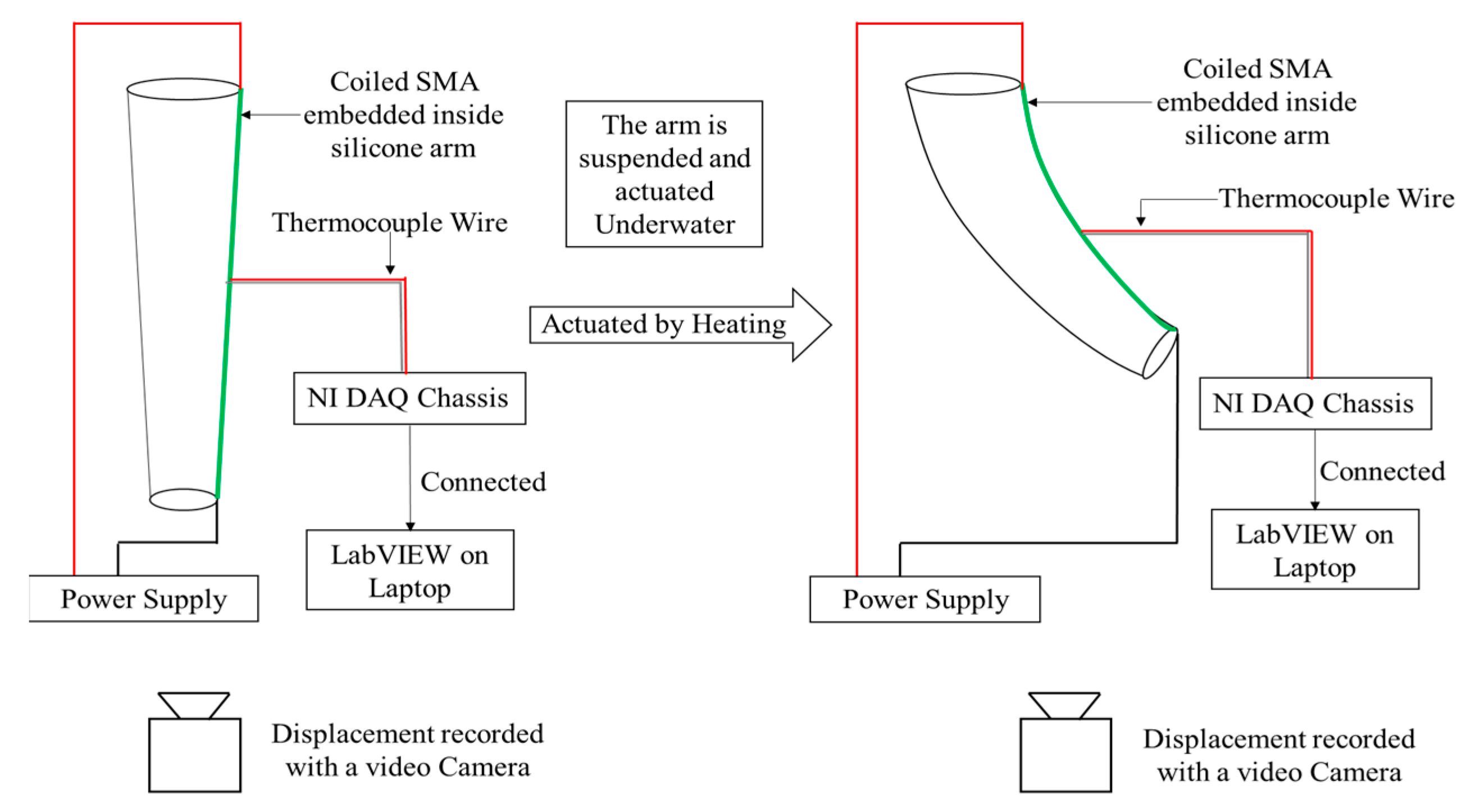
2.3. Experimental Setup of the Bending Characteristics of the Arm
2.4. Weightlifting Characterization of the Single SMA Embedded Inside the Silicone Arm
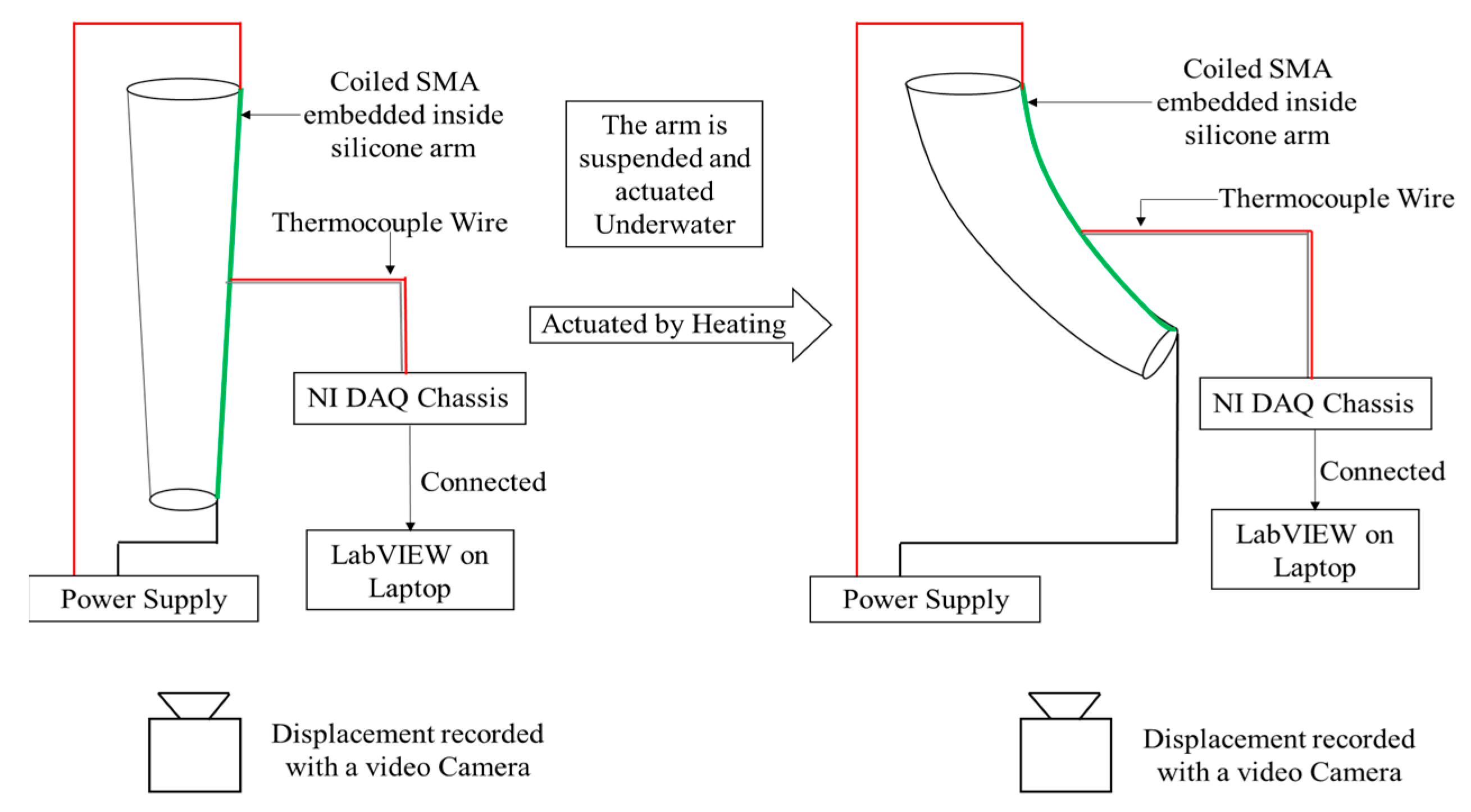
2.5. Temperature Modeling of the SMA Embedded in the Silicone Arm
3. Results and Discussion
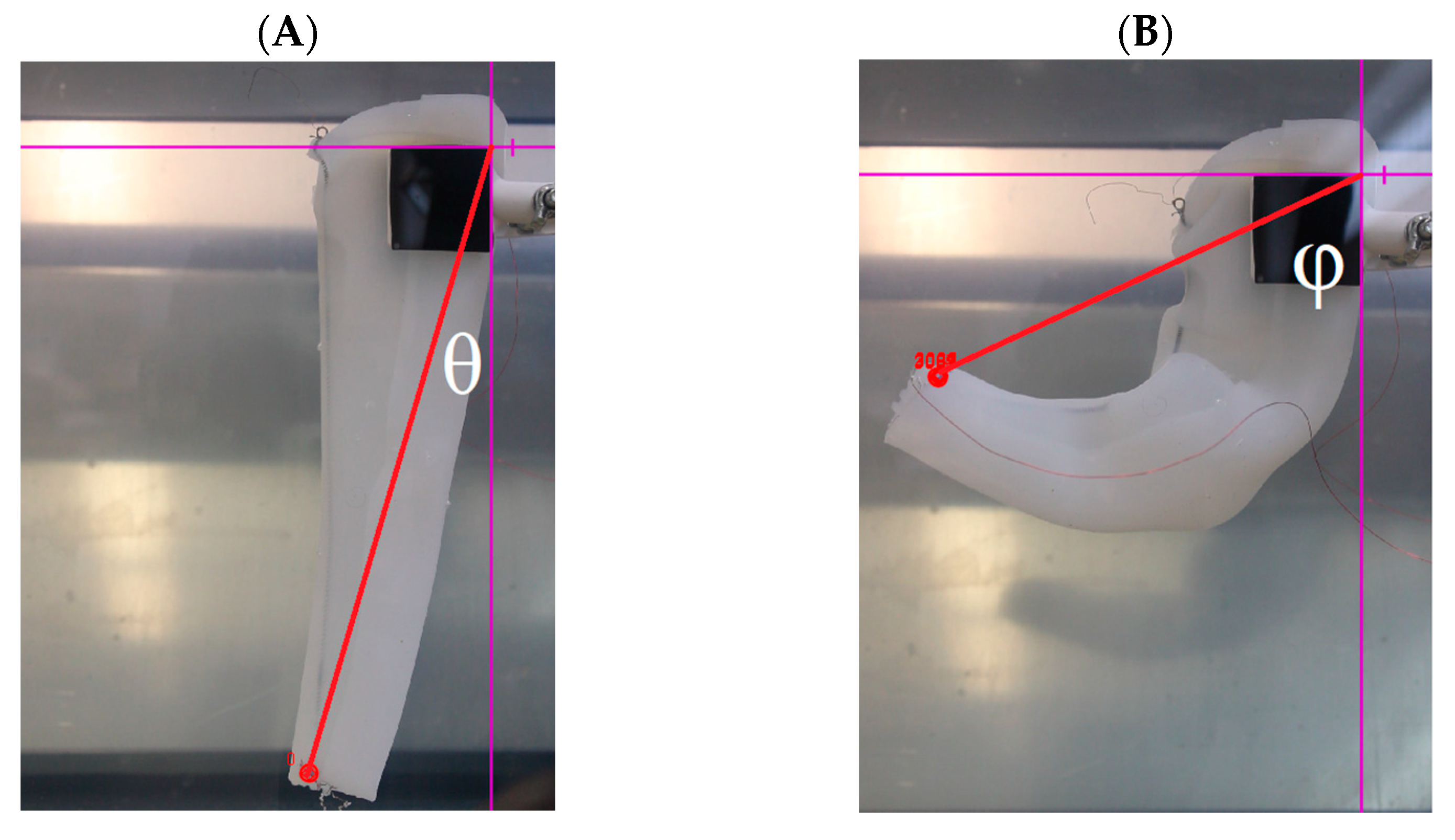
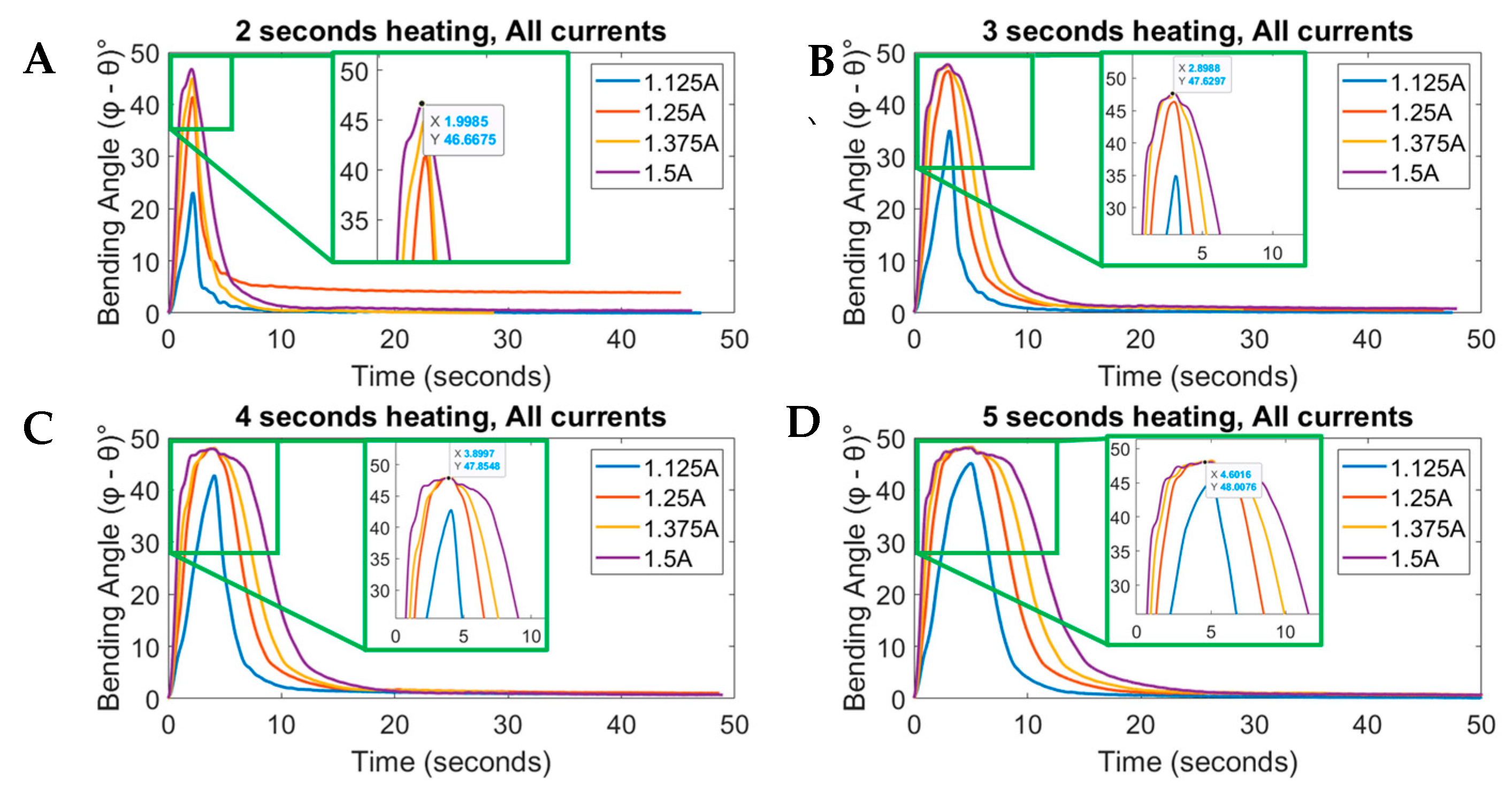
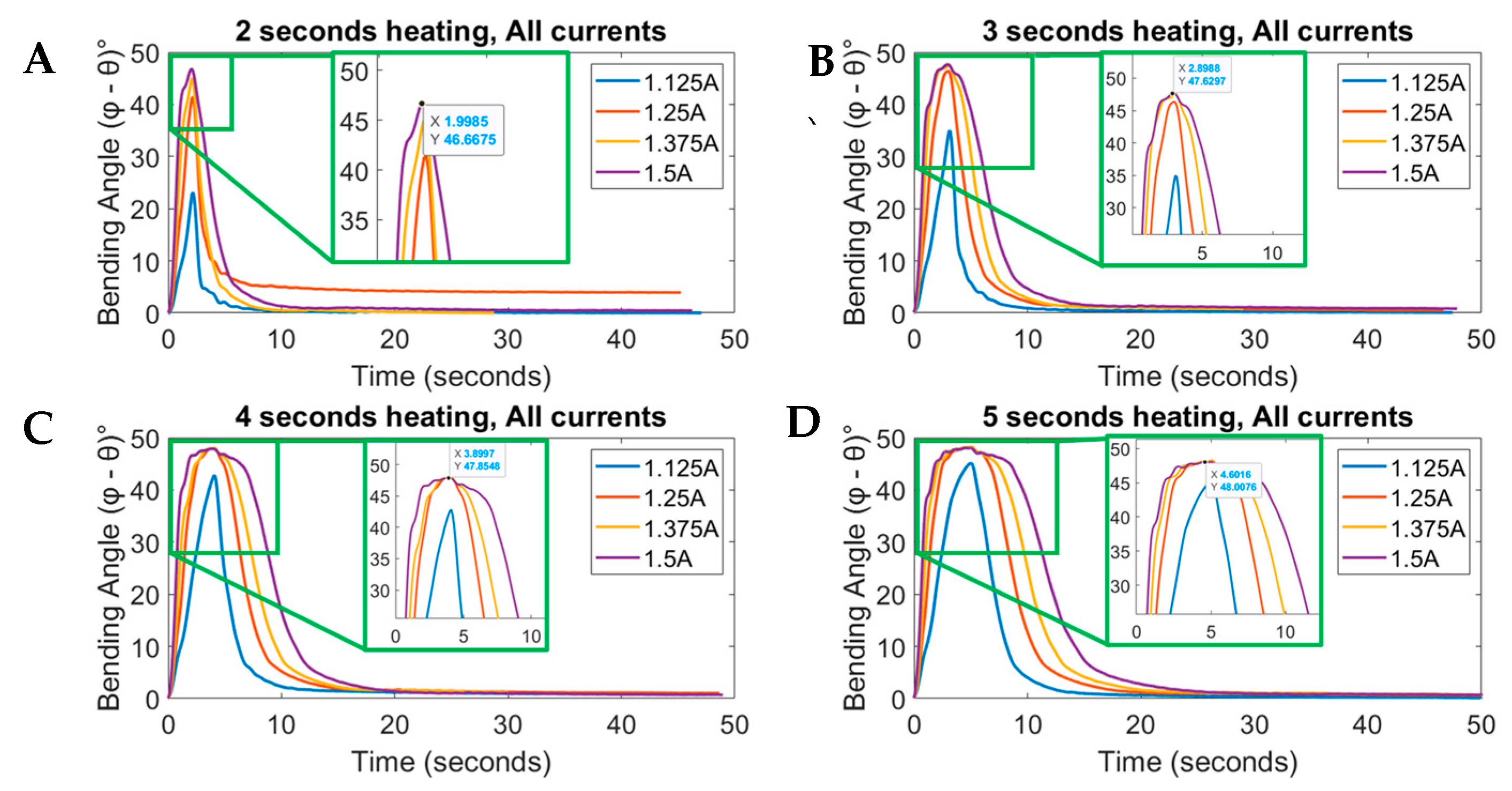
3.1. Bending Characterization of the Silicone Arm
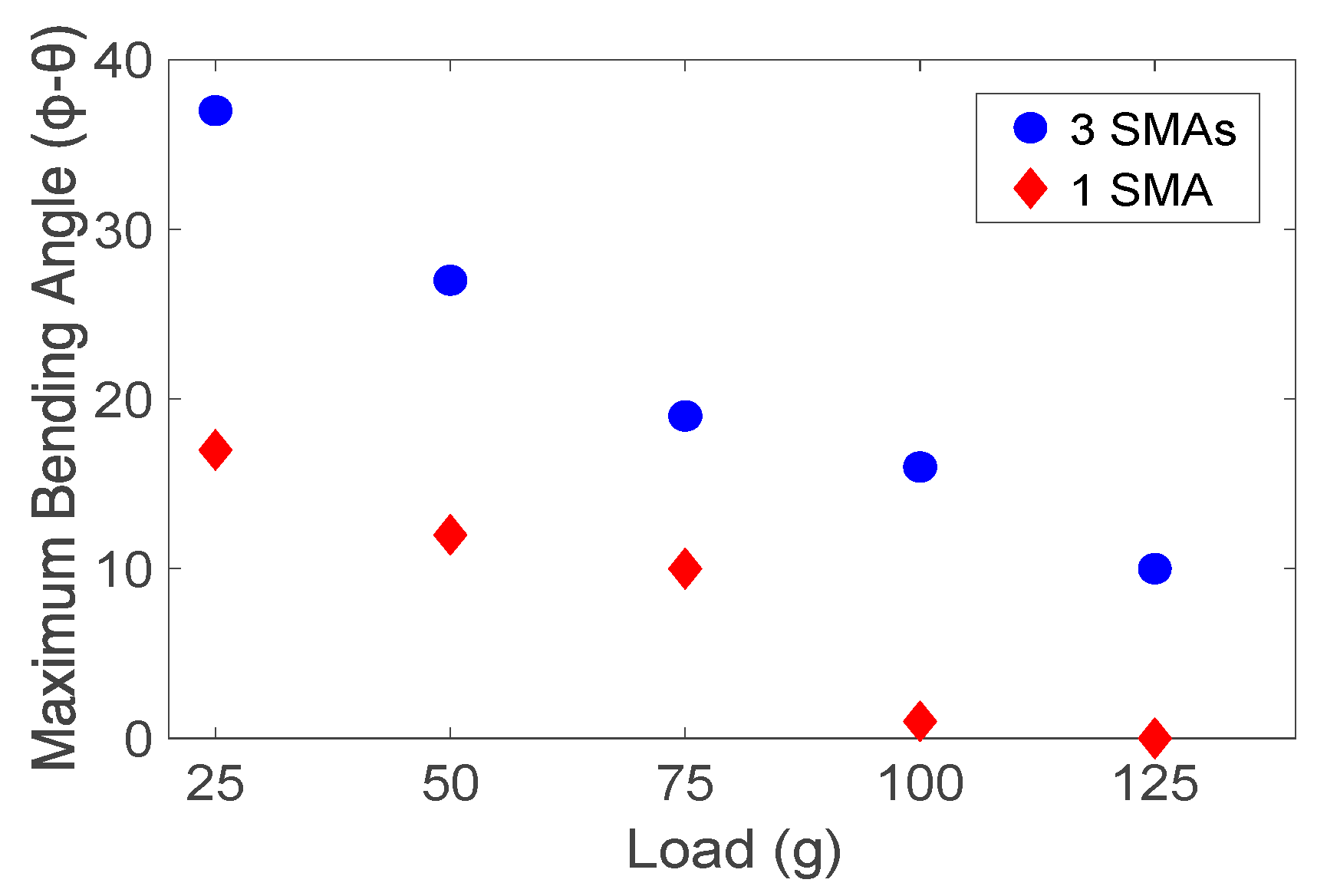
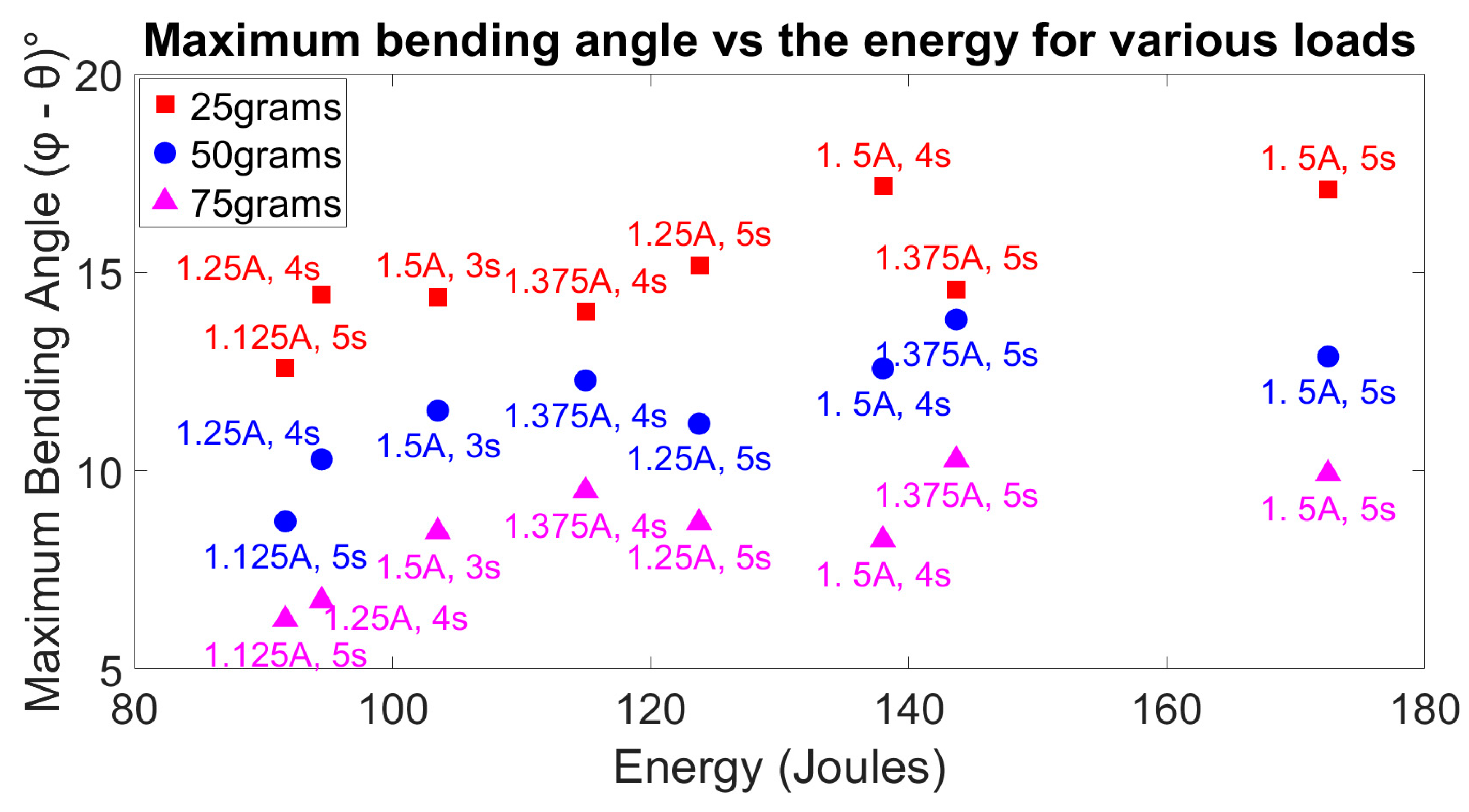
3.2. Weightlifting Characterization of the Arm with a Single Embedded Coiled SMA
3.3. Weightlifting Characterization of the Arm with Multiple Embedded Coiled SMAs
3.4. Temperature Modeling of the Single SMA Coil Embedded in a Silicone Arm
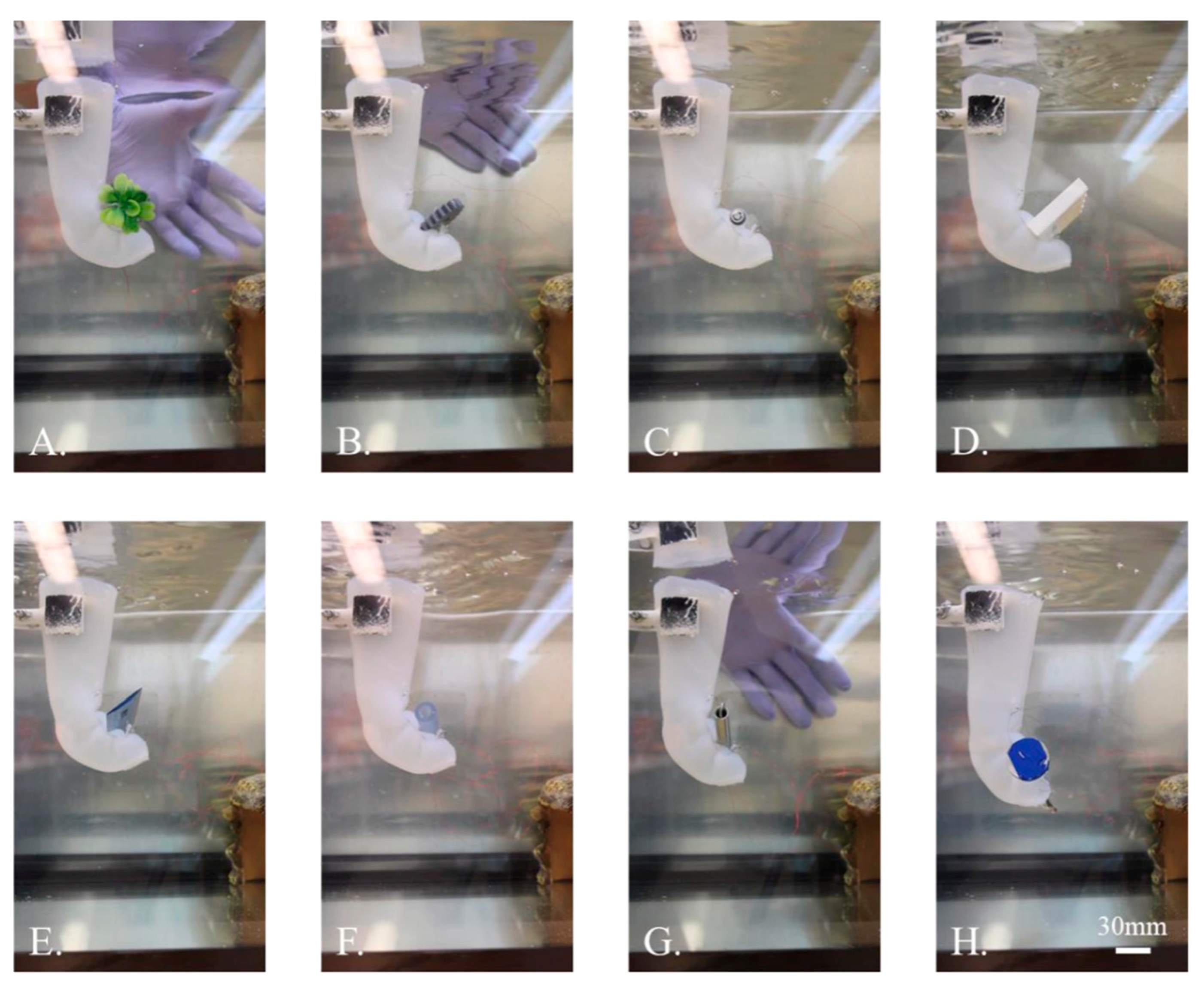
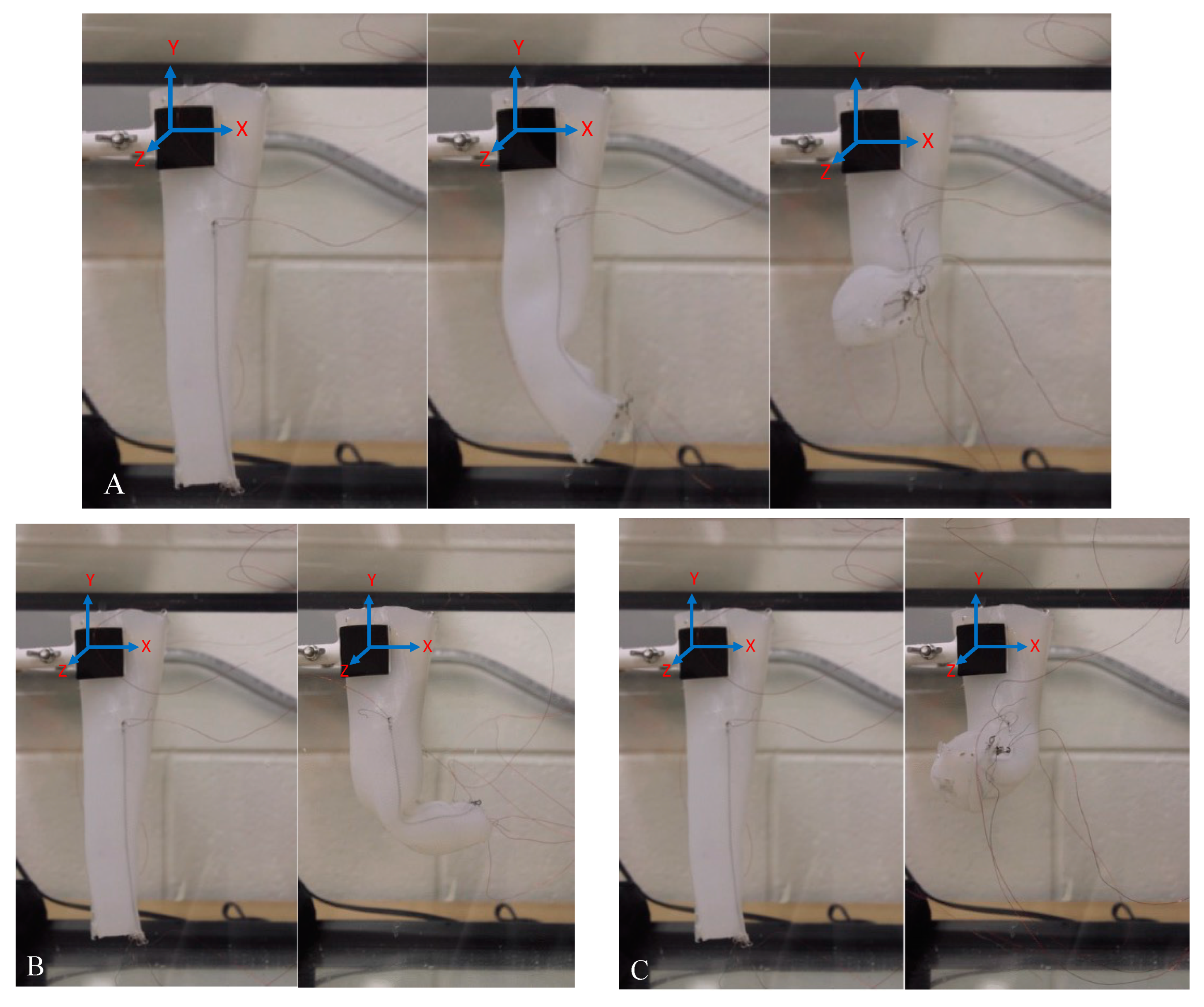
3.5. Grasping and Shape Manipulation of the Arm
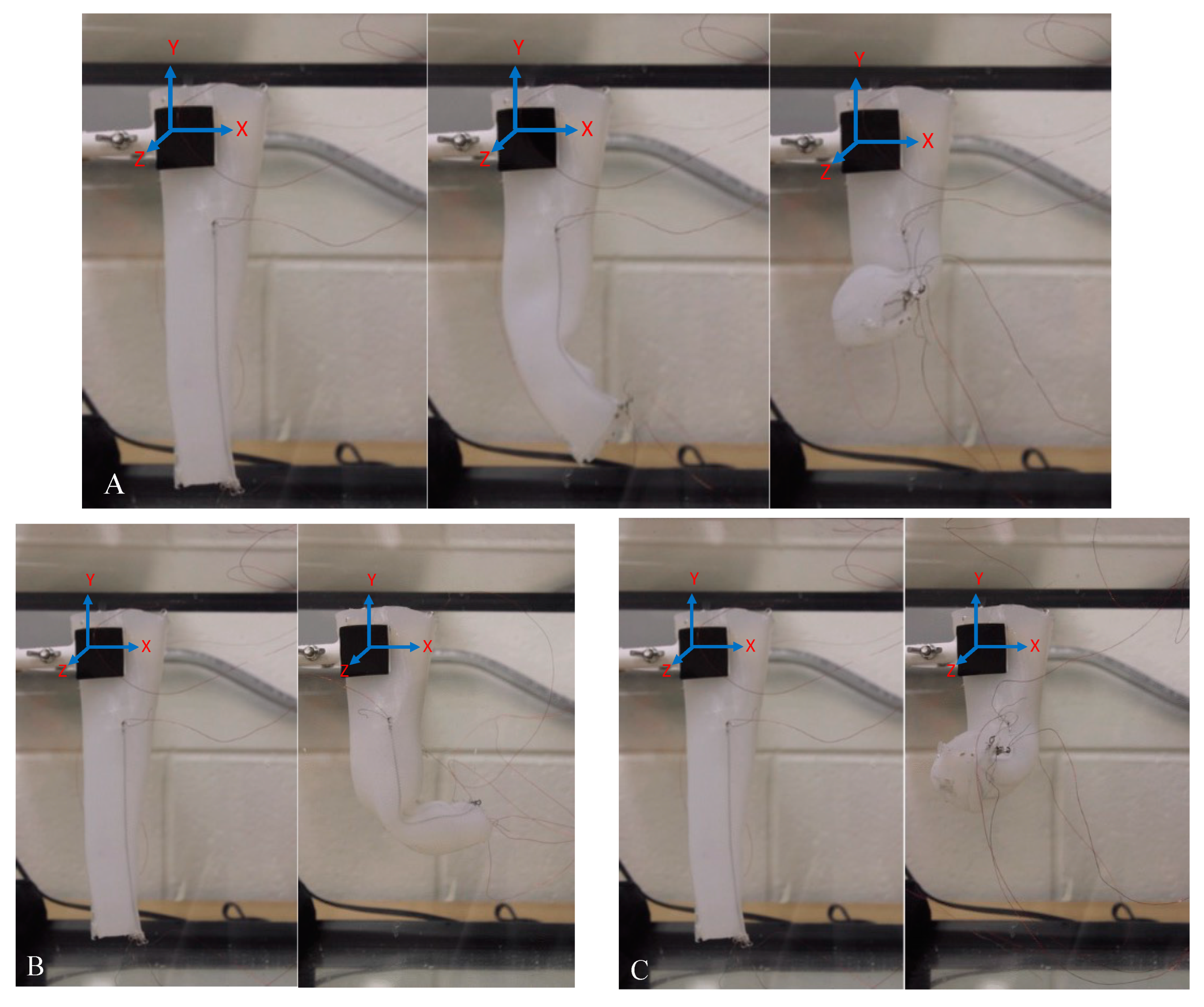
3.6. Shape Manipulation Utilizing Sequential Actuation
4. Conclusions and Future Work
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Tolley, M.T.; Shepherd, R.F.; Galloway, K.C.; Wood, R.J.; Whitesides, G.M. A resilient, untethered soft robot. Soft Robot. 2014, 1, 213–223. [Google Scholar] [CrossRef]
- Shintake, J.; Shea, H.; Floreano, D. Biomimetic underwater robots based on dielectric elastomer actuators. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Republic of Korea, 9–14 October 2016; IEEE: New York, NY, USA, 2016; pp. 4957–4962. [Google Scholar]
- Calderón, A.A.; Ugalde, J.C.; Zagal, J.C.; Pérez-Arancibia, N.O. Design, fabrication and control of a multi-material-multi-actuator soft robot inspired by burrowing worms. In Proceedings of the 2016 IEEE International Conference on Robotics and Biomimetics (ROBIO), Qingdao, China, 3–7 December 2016; IEEE: New York, NY, USA, 2016; pp. 31–38. [Google Scholar]
- Kim, S.; Laschi, C.; Trimmer, B. Soft robotics: A bioinspired evolution in robotics. Trends Biotechnol. 2013, 31, 287–294. [Google Scholar] [CrossRef] [PubMed]
- Almubarak, Y.; Punnoose, M.; Maly, N.X.; Hamidi, A.; Tadesse, Y. KryptoJelly: A jellyfish robot with confined, adjustable pre-stress, and easily replaceable shape memory alloy NiTi actuators. Smart Mater. Struct. 2020, 29, 075011. [Google Scholar] [CrossRef]
- Almubarak, Y.; Schmutz, M.; Perez, M.; Shah, S.; Tadesse, Y. Kraken: A wirelessly controlled octopus-like hybrid robot utilizing stepper motors and fishing line artificial muscle for grasping underwater. Int. J. Intell. Robot. Appl. 2022, 6, 543–563. [Google Scholar] [CrossRef]
- Almubarak, Y.; Tadesse, Y. Twisted and coiled polymer (TCP) muscles embedded in silicone elastomer for use in soft robot. Int. J. Intell. Robot. Appl. 2017, 1, 352–368. [Google Scholar] [CrossRef]
- Li, J.; He, J.; Yu, K.; Woźniak, M.; Wei, W. A biomimetic flexible fishtail embedded with shape memory alloy wires. IEEE Access 2019, 7, 166906–166916. [Google Scholar] [CrossRef]
- Fan, J.; Du, Q.; Dong, Z.; Zhao, J.; Xu, T. Design of the Jump Mechanism for a Biomimetic Robotic Frog. Biomimetics 2022, 7, 142. [Google Scholar] [CrossRef]
- Potnuru, A.; Tadesse, Y. Characterization of coiled SMA actuators for humanoid robot. In Active and Passive Smart Structures and Integrated Systems; SPIE: Bellingham, WA, USA, 2017; pp. 175–184. [Google Scholar]
- Hamidi, A.; Almubarak, Y.; Tadesse, Y. Multidirectional 3D-printed functionally graded modular joint actuated by TCPFL muscles for soft robots. Bio-Des. Manuf. 2019, 2, 256–268. [Google Scholar] [CrossRef]
- Matharu, P.S.; Gong, P.; Guntaka, K.P.R.; Almubarak, Y.; Jin, Y.; Tadesse, Y.T. Jelly-Z: Swimming performance and analysis of twisted and coiled polymer (TCP) actuated jellyfish soft robot. Sci. Rep. 2023, 13, 11086. [Google Scholar] [CrossRef]
- Song, S.-H.; Lee, J.-Y.; Rodrigue, H.; Choi, I.-S.; Kang, Y.J.; Ahn, S.-H. 35 Hz shape memory alloy actuator with bending-twisting mode. Sci. Rep. 2016, 6, 21118. [Google Scholar] [CrossRef]
- Hamidi, A.; Almubarak, Y.; Rupawat, Y.M.; Warren, J.; Tadesse, Y. Poly-Saora robotic jellyfish: Swimming underwater by twisted and coiled polymer actuators. Smart Mater. Struct. 2020, 29, 045039. [Google Scholar] [CrossRef]
- Haines, C.S.; Lima, M.D.; Li, N.; Spinks, G.M.; Foroughi, J.; Madden, J.D.; Kim, S.H.; Fang, S.; Jung de Andrade, M.; Göktepe, F. Artificial muscles from fishing line and sewing thread. Science 2014, 343, 868–872. [Google Scholar] [CrossRef] [PubMed]
- Saharan, L.; de Andrade, M.J.; Saleem, W.; Baughman, R.H.; Tadesse, Y. iGrab: Hand orthosis powered by twisted and coiled polymer muscles. Smart Mater. Struct. 2017, 26, 105048. [Google Scholar] [CrossRef]
- Matharu, P.S.; Ghadge, A.A.; Almubarak, Y.; Tadesse, Y. Jelly-Z: Twisted and coiled polymer muscle actuated jellyfish robot for environmental monitoring. Acta IMEKO 2022, 11, 1–7. [Google Scholar] [CrossRef]
- Lee, J.-H.; Chung, Y.S.; Rodrigue, H. Long shape memory alloy tendon-based soft robotic actuators and implementation as a soft gripper. Sci. Rep. 2019, 9, 11251. [Google Scholar] [CrossRef]
- Deng, E.; Tadesse, Y. A soft 3D-printed robotic hand actuated by coiled SMA. Actuators 2020, 10, 6. [Google Scholar] [CrossRef]
- Calisti, M.; Giorelli, M.; Levy, G.; Mazzolai, B.; Hochner, B.; Laschi, C.; Dario, P. An octopus-bioinspired solution to movement and manipulation for soft robots. Bioinspir. Biomim. 2011, 6, 036002. [Google Scholar] [CrossRef]
- Arienti, A.; Calisti, M.; Giorgio-Serchi, F.; Laschi, C. PoseiDRONE: Design of a soft-bodied ROV with crawling, swimming and manipulation ability. In Proceedings of the 2013 OCEANS, San Diego, CA, USA, 23–27 September 2013; IEEE: New York, NY, USA, 2013; pp. 1–7. [Google Scholar]
- Cianchetti, M.; Calisti, M.; Margheri, L.; Kuba, M.; Laschi, C. Bioinspired locomotion and grasping in water: The soft eight-arm OCTOPUS robot. Bioinspir. Biomim. 2015, 10, 035003. [Google Scholar] [CrossRef]
- Laschi, C.; Mazzolai, B.; Mattoli, V.; Cianchetti, M.; Dario, P. Design of a biomimetic robotic octopus arm. Bioinspir. Biomim. 2009, 4, 015006. [Google Scholar] [CrossRef]
- Guo, Y.; Liu, L.; Liu, Y.; Leng, J. Review of dielectric elastomer actuators and their applications in soft robots. Adv. Intell. Syst. 2021, 3, 2000282. [Google Scholar] [CrossRef]
- Marchese, A.D.; Onal, C.D.; Rus, D. Autonomous soft robotic fish capable of escape maneuvers using fluidic elastomer actuators. Soft Robot. 2014, 1, 75–87. [Google Scholar] [CrossRef] [PubMed]
- Cheng, T.; Li, G.; Liang, Y.; Zhang, M.; Liu, B.; Wong, T.-W.; Forman, J.; Chen, M.; Wang, G.; Tao, Y. Untethered soft robotic jellyfish. Smart Mater. Struct. 2018, 28, 015019. [Google Scholar] [CrossRef]
- Wehner, M.; Truby, R.L.; Fitzgerald, D.J.; Mosadegh, B.; Whitesides, G.M.; Lewis, J.A.; Wood, R.J. An integrated design and fabrication strategy for entirely soft, autonomous robots. Nature 2016, 536, 451–455. [Google Scholar] [CrossRef]
- Joshi, A.; Kulkarni, A.; Tadesse, Y. FludoJelly: Experimental study on jellyfish-like soft robot enabled by soft pneumatic composite (SPC). Robotics 2019, 8, 56. [Google Scholar] [CrossRef]
- Shepherd, R.F.; Ilievski, F.; Choi, W.; Morin, S.A.; Stokes, A.A.; Mazzeo, A.D.; Chen, X.; Wang, M.; Whitesides, G.M. Multigait soft robot. Proc. Natl. Acad. Sci. USA 2011, 108, 20400–20403. [Google Scholar] [CrossRef]
- Frame, J.; Lopez, N.; Curet, O.; Engeberg, E.D. Thrust force characterization of free-swimming soft robotic jellyfish. Bioinspir. Biomim. 2018, 13, 064001. [Google Scholar] [CrossRef] [PubMed]
- Gruber, D.F.; Wood, R.J. Advances and future outlooks in soft robotics for minimally invasive marine biology. Sci. Robot. 2022, 7, eabm6807. [Google Scholar] [CrossRef]
- Sfakiotakis, M.; Kazakidi, A.; Tsakiris, D. Octopus-inspired multi-arm robotic swimming. Bioinspir. Biomim. 2015, 10, 035005. [Google Scholar] [CrossRef]
- Wu, Q.; Yang, X.; Wu, Y.; Zhou, Z.; Wang, J.; Zhang, B.; Luo, Y.; Chepinskiy, S.A.; Zhilenkov, A.A. A novel underwater bipedal walking soft robot bio-inspired by the coconut octopus. Bioinspir. Biomim. 2021, 16, 046007. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Quantity | Description | Value |
|---|---|---|
| Water Temperature | 17.5 °C | |
| I | Current | 1.125 A–1.5 A ** |
| V | Voltage | 18.9 A–23.0 A ** |
| h | Convective Heat transfer coefficient | Obtained semi-analytically, partly through the experiments |
| As | The surface area of the coil exposed to the silicone and/or water | 0.012 m2 |
| m | The mass of the SMA coil by itself | 0.00228 kg |
| Cp | Specific heat capacity of the SMA + Silicone | 1620 J/kg/°C |
| Duty Cycle | The ratio of the heating time to cooling time | 4.2–10% ** |
| Rate of change of temperature per unit time | Extracted Experimentally | 12.12 °C/s *** |
| I | t | Power Density | V | Work = (VIt) | Maximum Bending Angle | ||
|---|---|---|---|---|---|---|---|
| A | sec | kW/kg | Volts | Joules | 25 g | 50 g | 75 g |
| 1.125 | 5 | 8.04 | 16.3 | 91.7 | 12.58 | 8.73 | 6.25 |
| 1.25 | 4 | 10.36 | 18.9 | 94.5 | 14.43 | 10.29 | 6.72 |
| 1.5 | 3 | 15.13 | 23.0 | 103.5 | 14.38 | 11.52 | 8.47 |
| 1.375 | 4 | 12.60 | 20.9 | 114.9 | 14.01 | 12.28 | 9.50 |
| 1.25 | 5 | 10.86 | 19.8 | 123.8 | 15.18 | 11.19 | 8.69 |
| 1.5 | 4 | 15.13 | 23.0 | 138.0 | 17.17 | 12.58 | 8.26 |
| 1.375 | 5 | 12.61 | 20.9 | 143.7 | 14.57 | 13.81 | 10.28 |
| 1.5 | 5 | 15.13 | 23.0 | 172.5 | 17.09 | 12.88 | 9.93 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Deshpande, S.; Almubarak, Y. Octopus-Inspired Robotic Arm Powered by Shape Memory Alloys (SMA). Actuators 2023, 12, 377. https://doi.org/10.3390/act12100377
Deshpande S, Almubarak Y. Octopus-Inspired Robotic Arm Powered by Shape Memory Alloys (SMA). Actuators. 2023; 12(10):377. https://doi.org/10.3390/act12100377
Chicago/Turabian StyleDeshpande, Shubham, and Yara Almubarak. 2023. "Octopus-Inspired Robotic Arm Powered by Shape Memory Alloys (SMA)" Actuators 12, no. 10: 377. https://doi.org/10.3390/act12100377
APA StyleDeshpande, S., & Almubarak, Y. (2023). Octopus-Inspired Robotic Arm Powered by Shape Memory Alloys (SMA). Actuators, 12(10), 377. https://doi.org/10.3390/act12100377