
Design, Development, and Control of a Novel Upper-Limb Power-Assist Exoskeleton System Driven by Pneumatic Muscle Actuators



Abstract
:1. Introduction
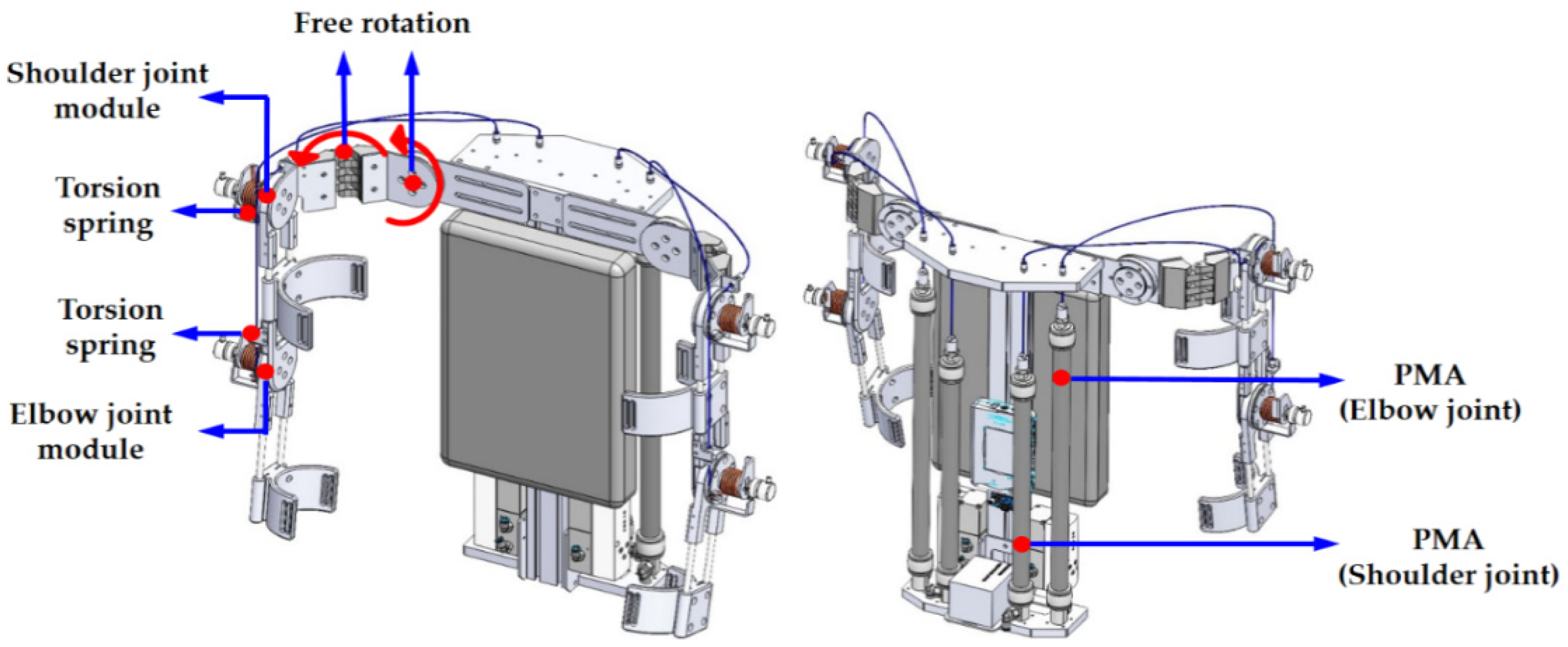
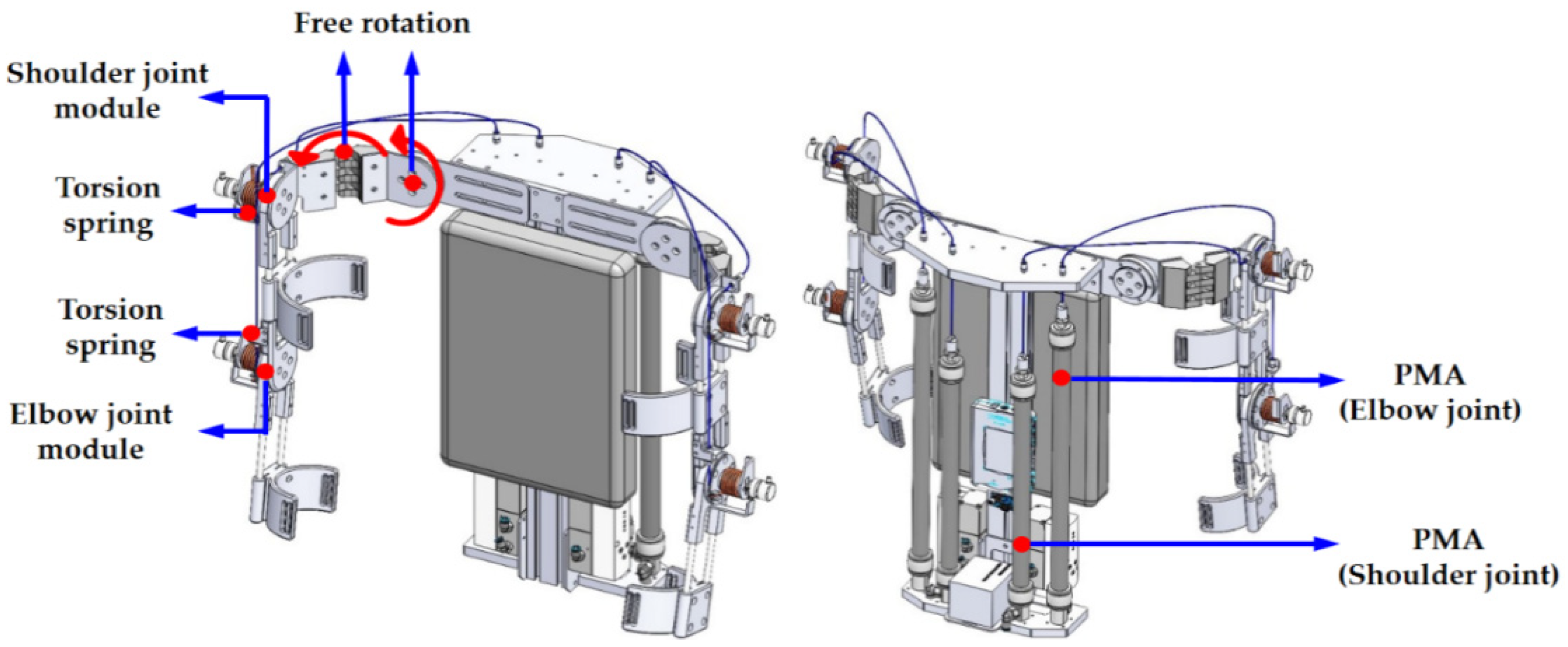
2. Mechanism Design of Upper-Limb Exoskeleton Power Assist System
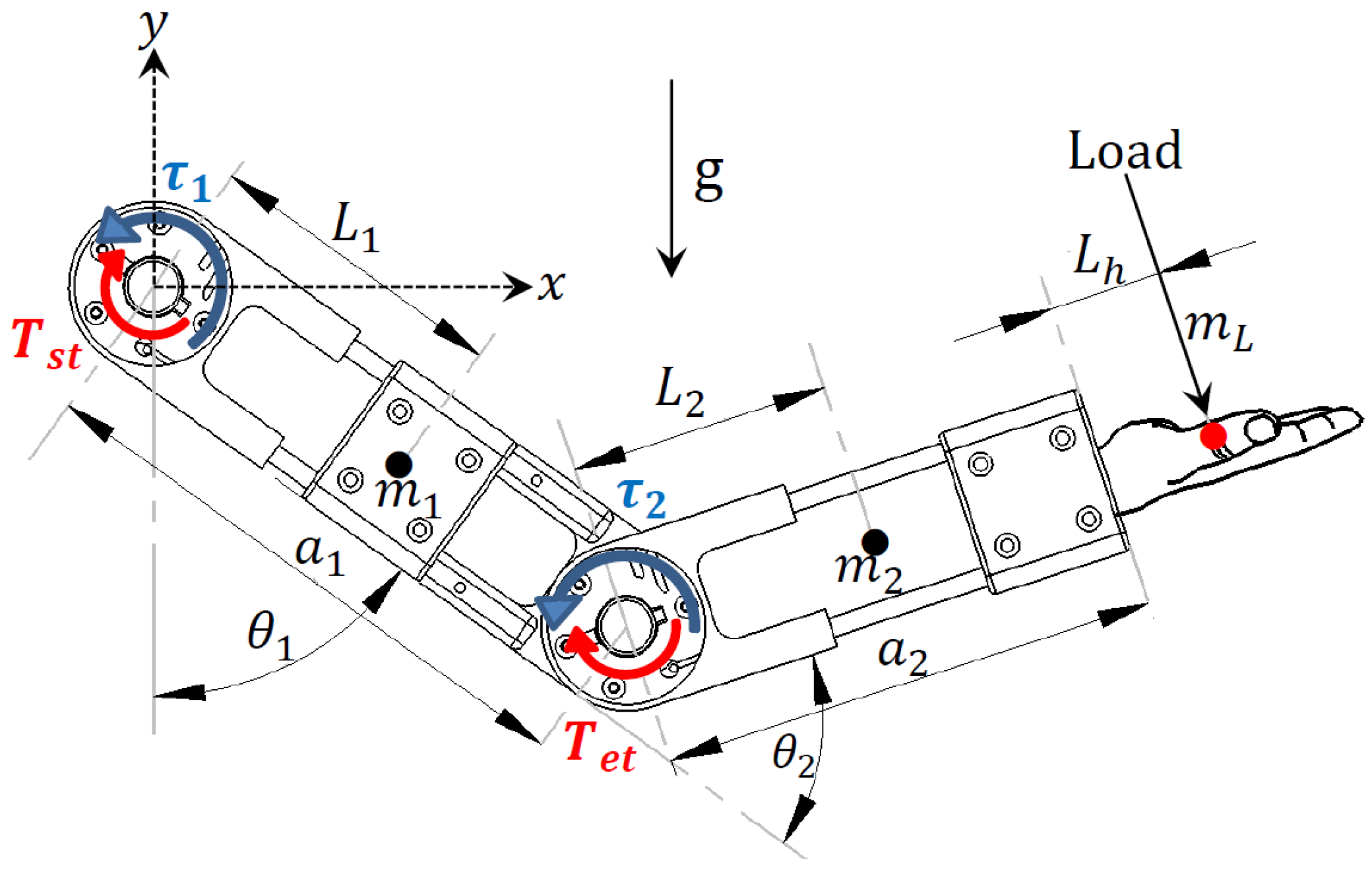
3. System Dynamics Model
4. Controller Design
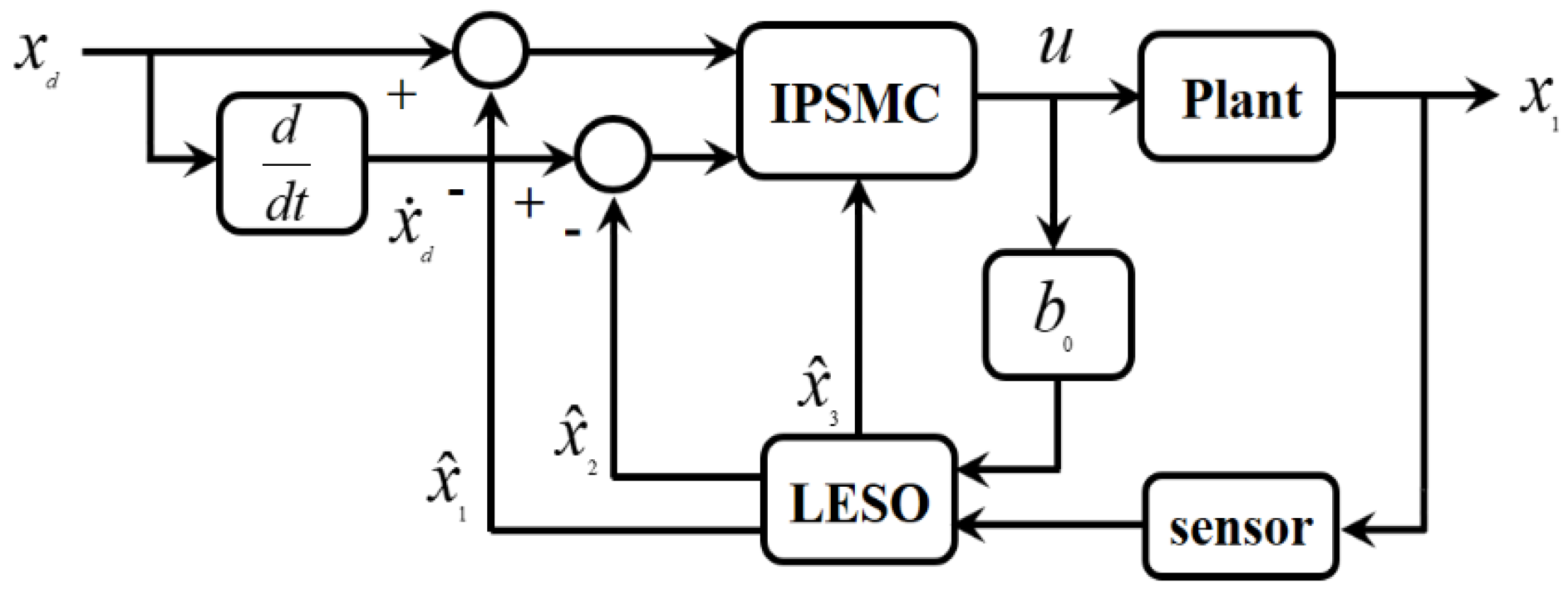
4.1. Design of Linear Extended State Observer
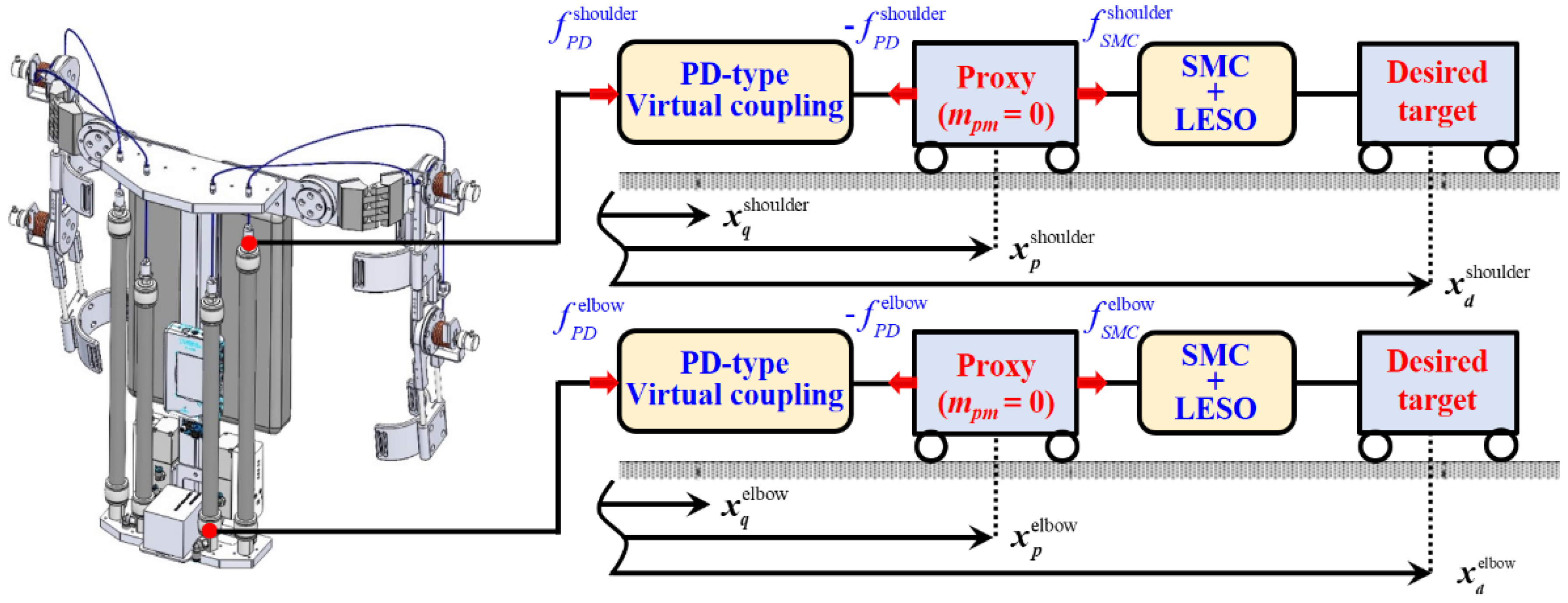
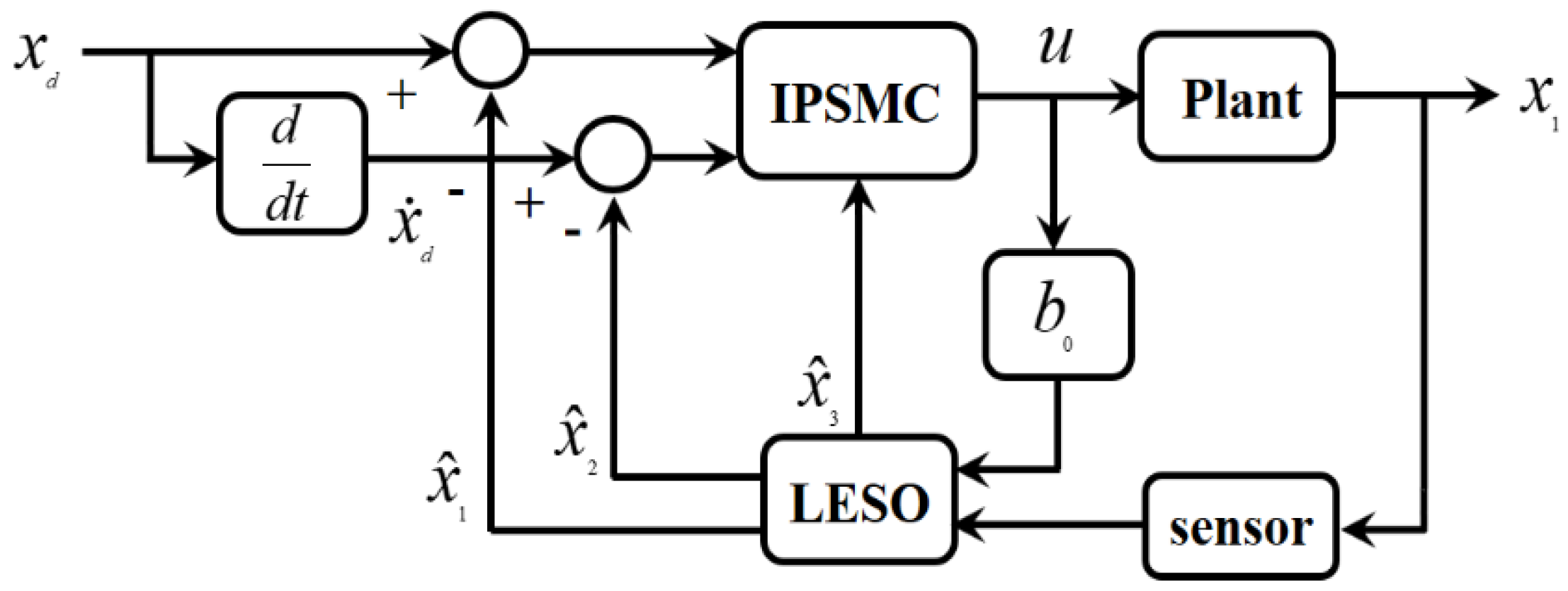
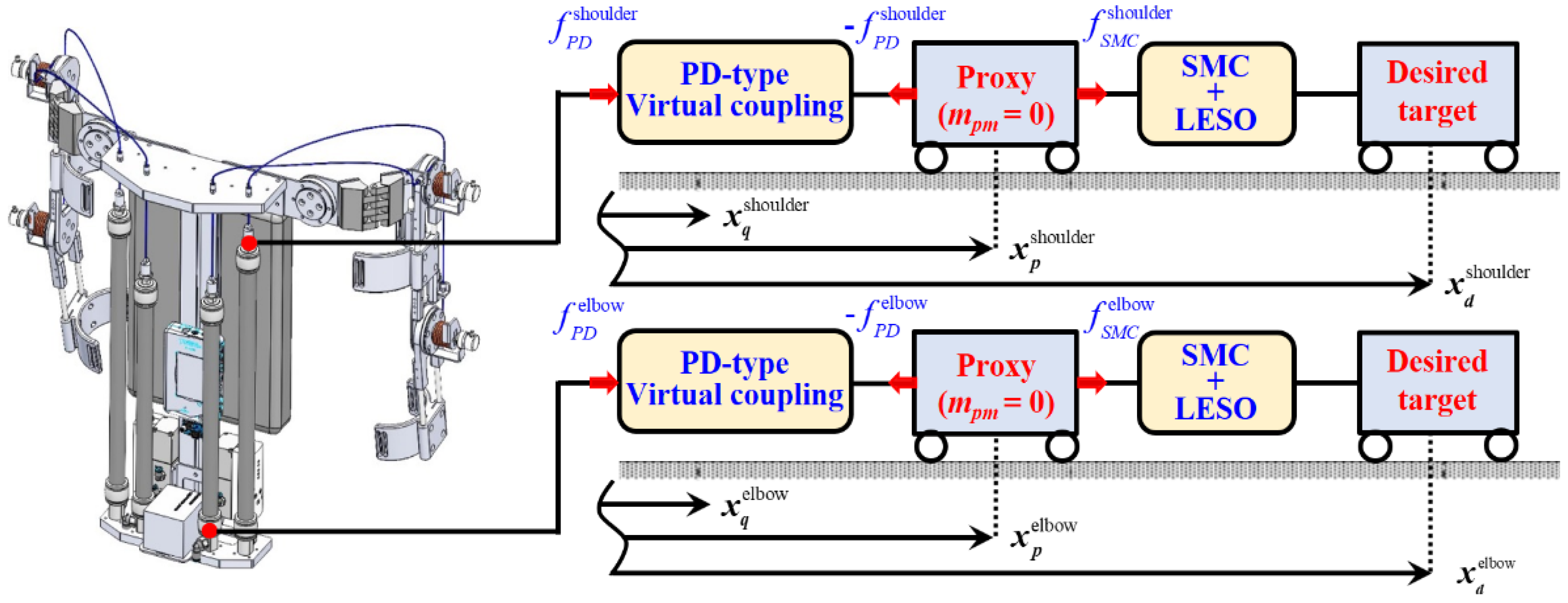
4.2. Improved Proxy-Based Sliding Mode Controller Integrated with Linear Extended State Observer
4.3. Stability Analysis
5. Experimental and Discussions
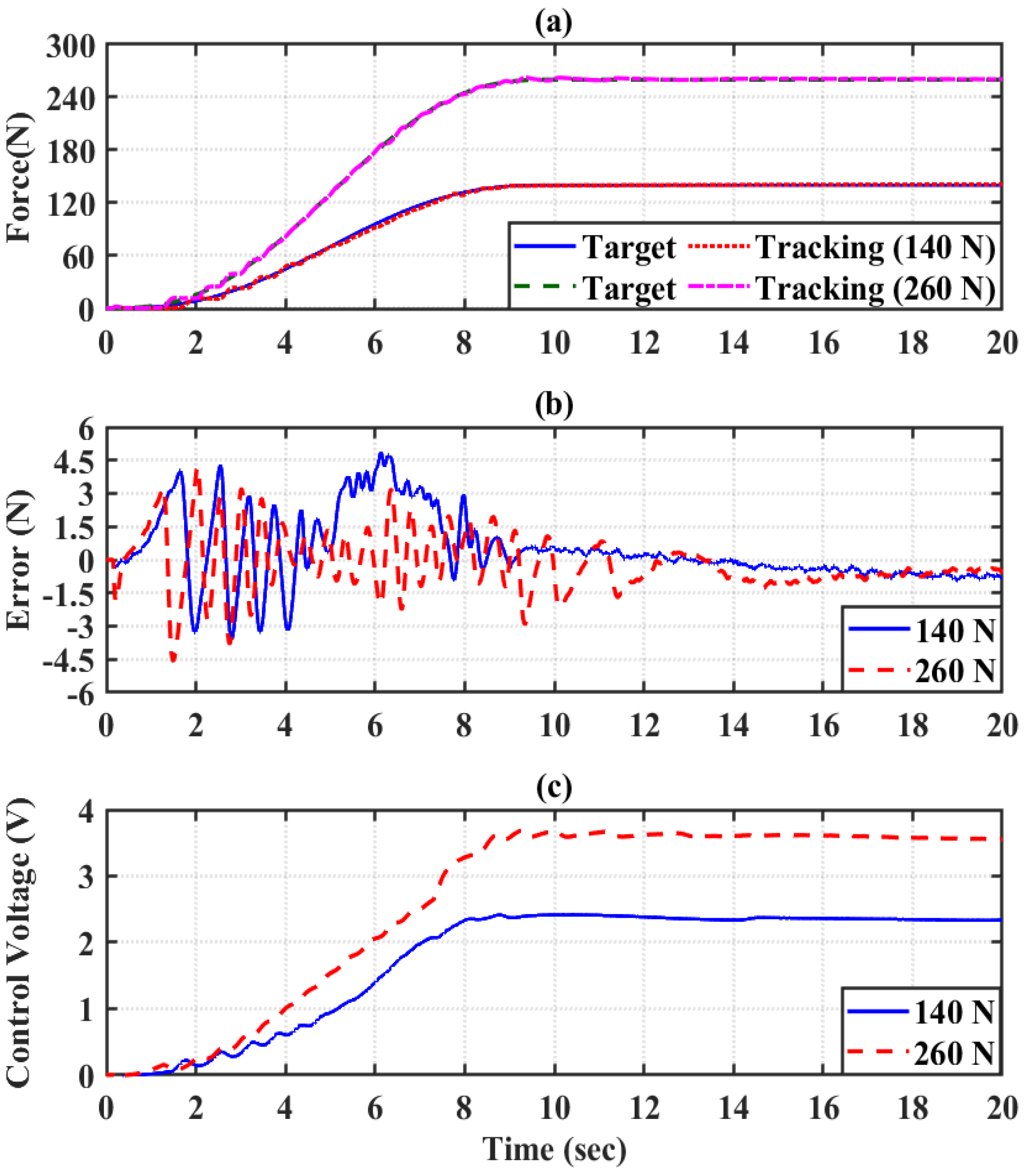
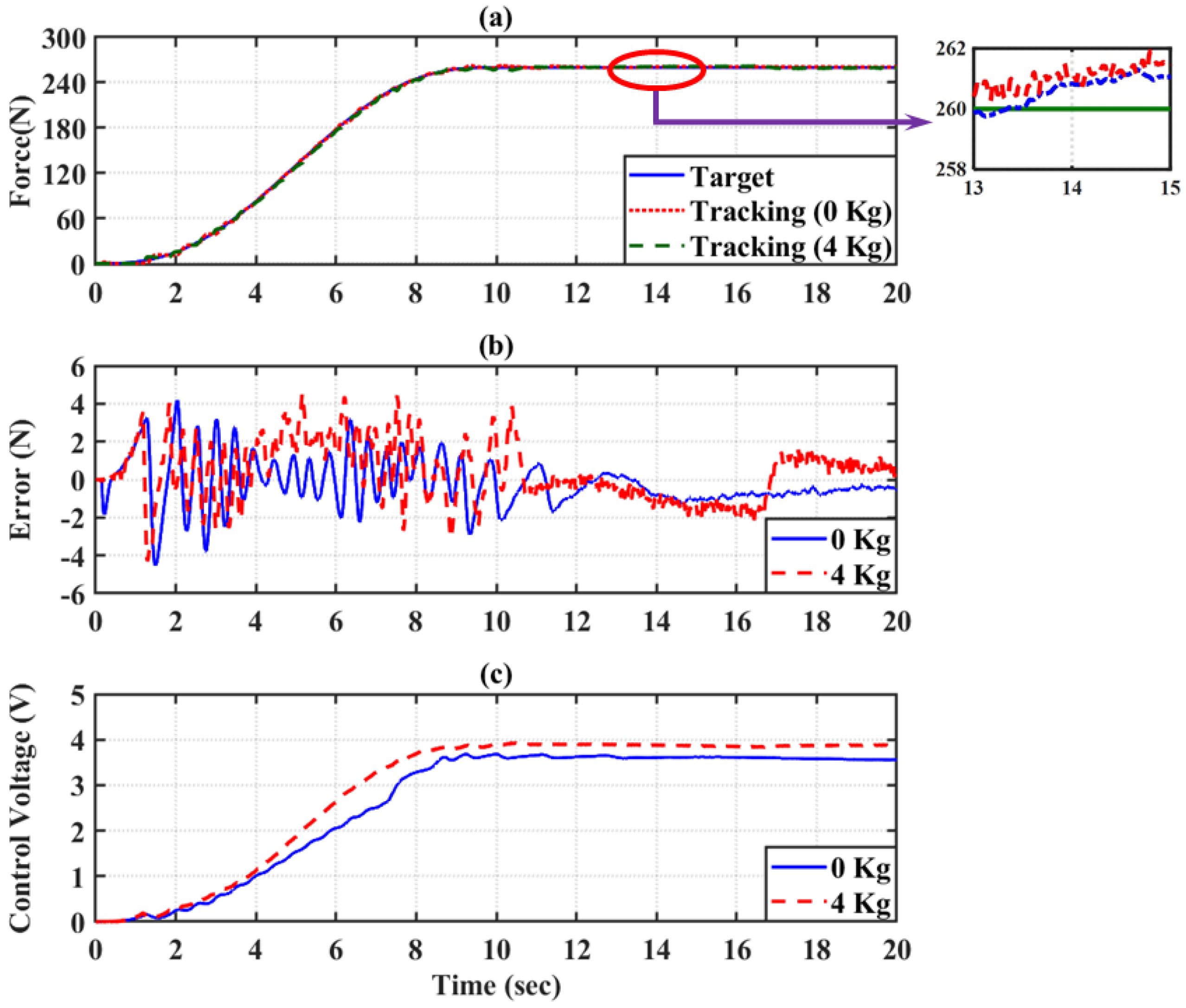
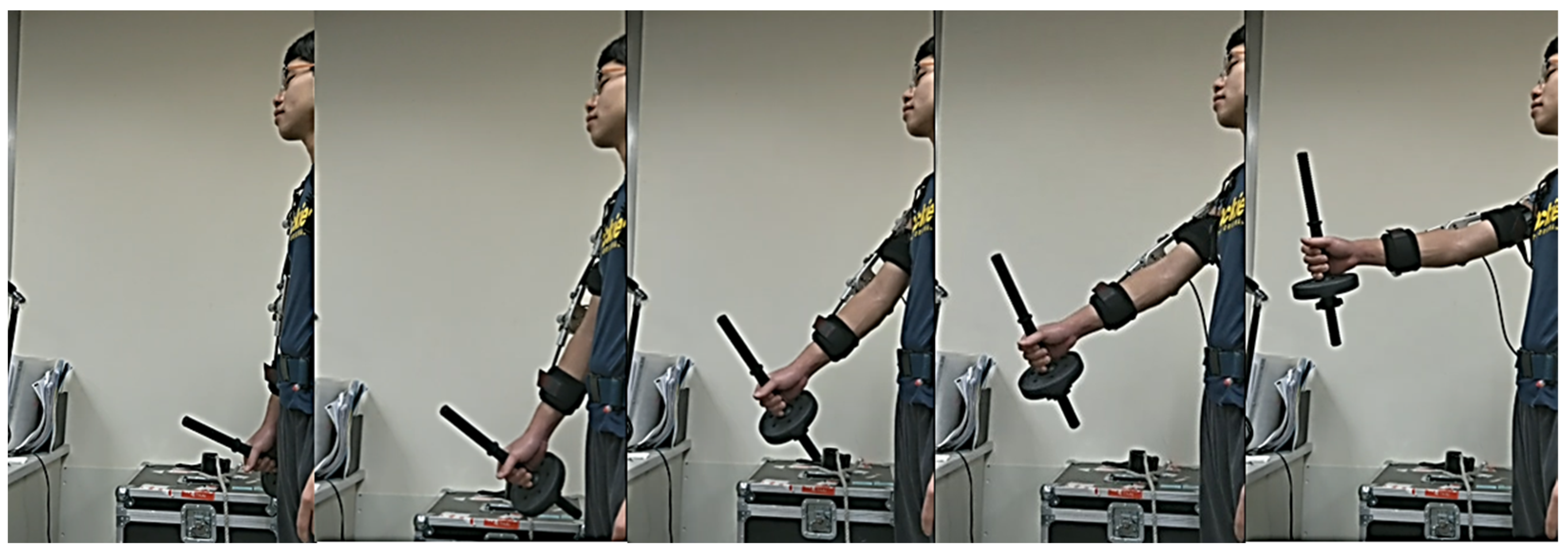
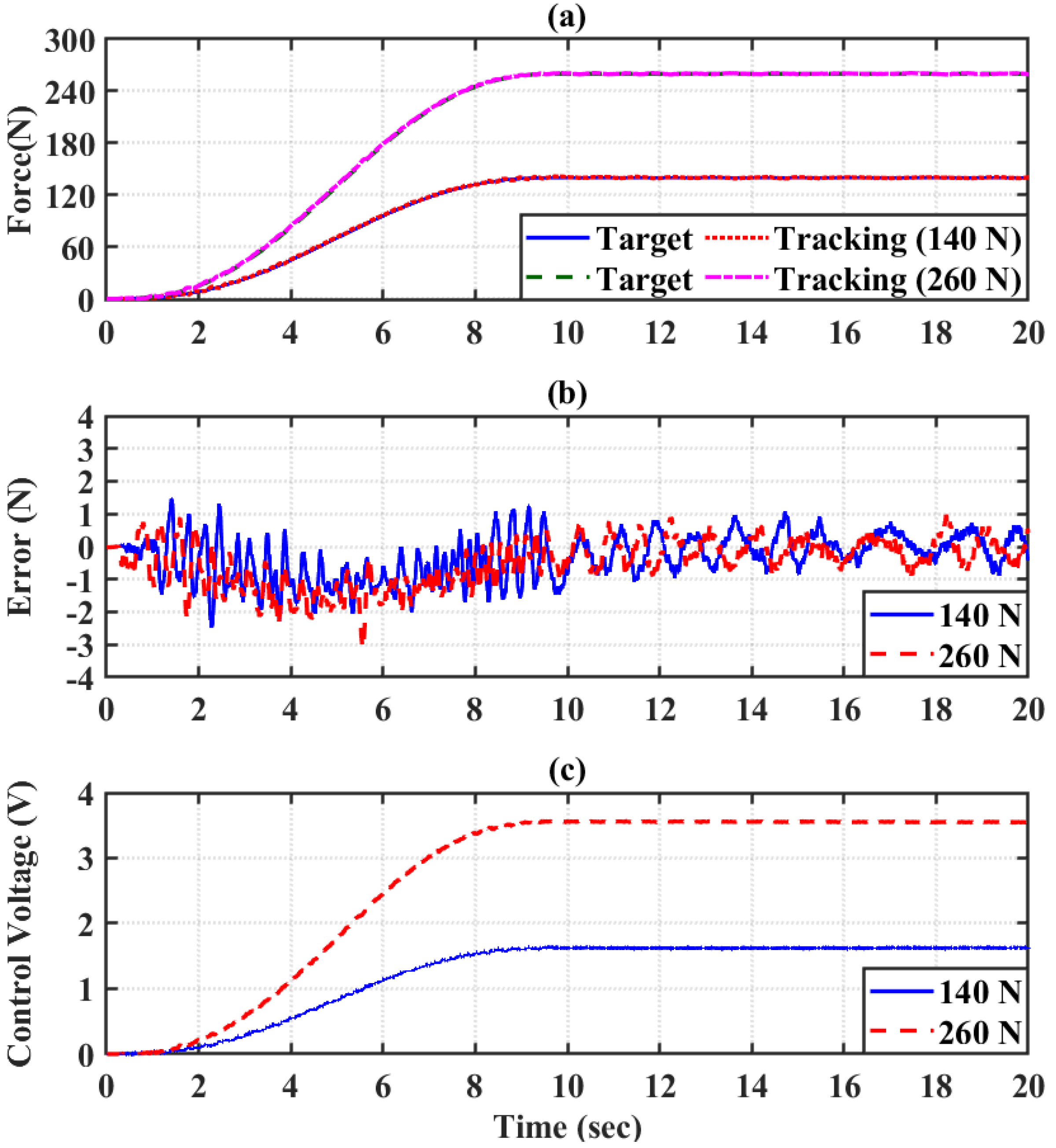
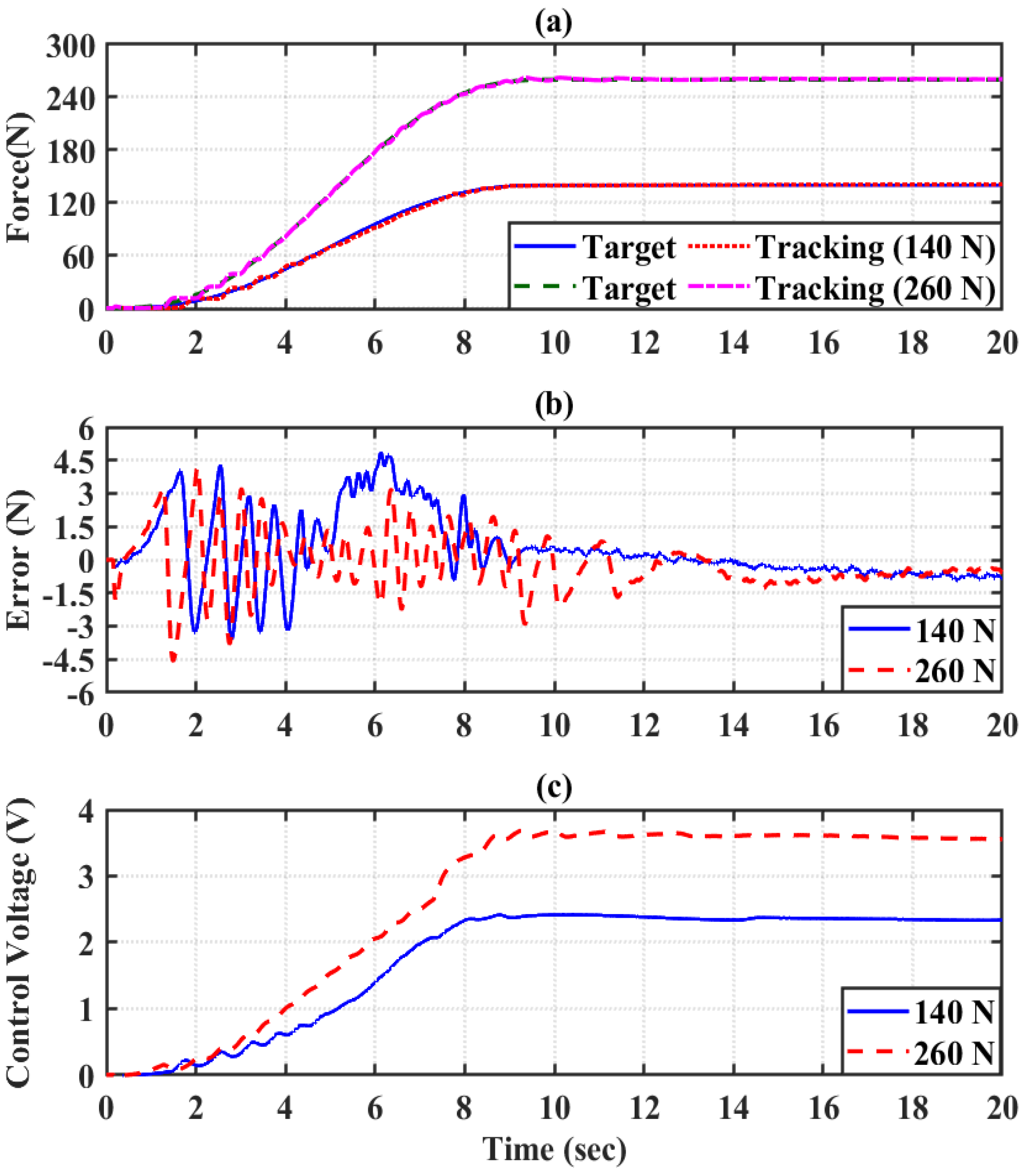
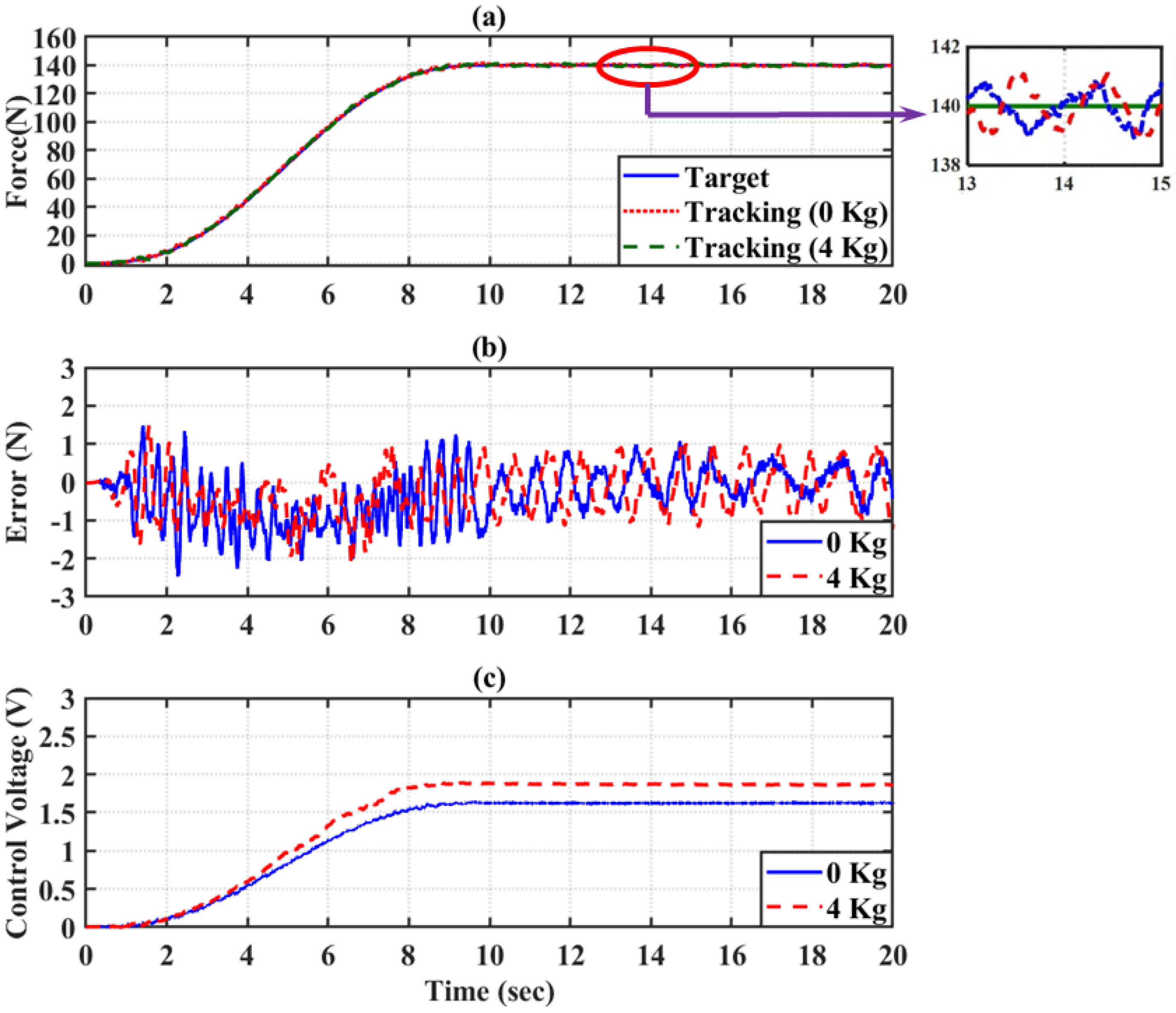
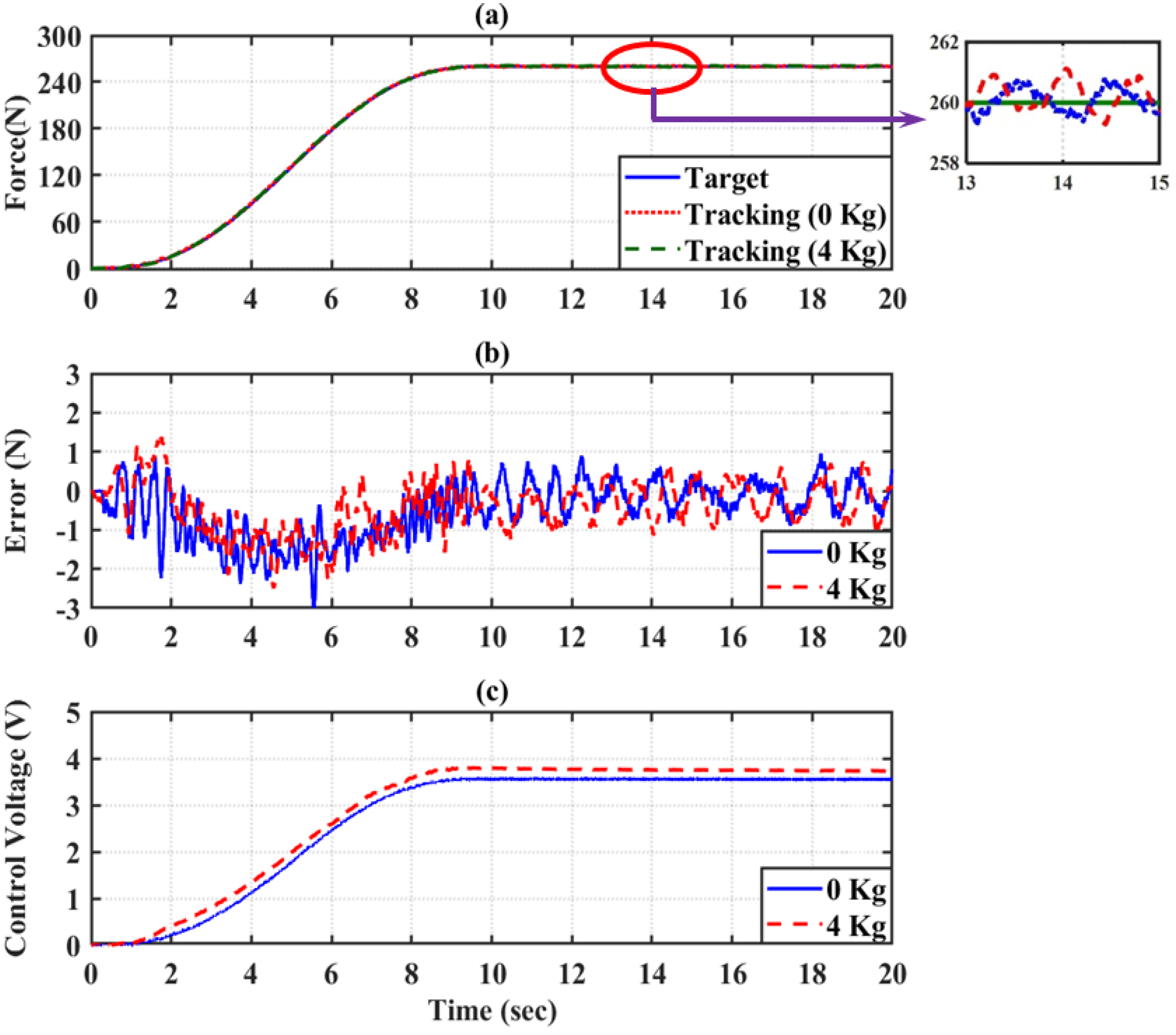
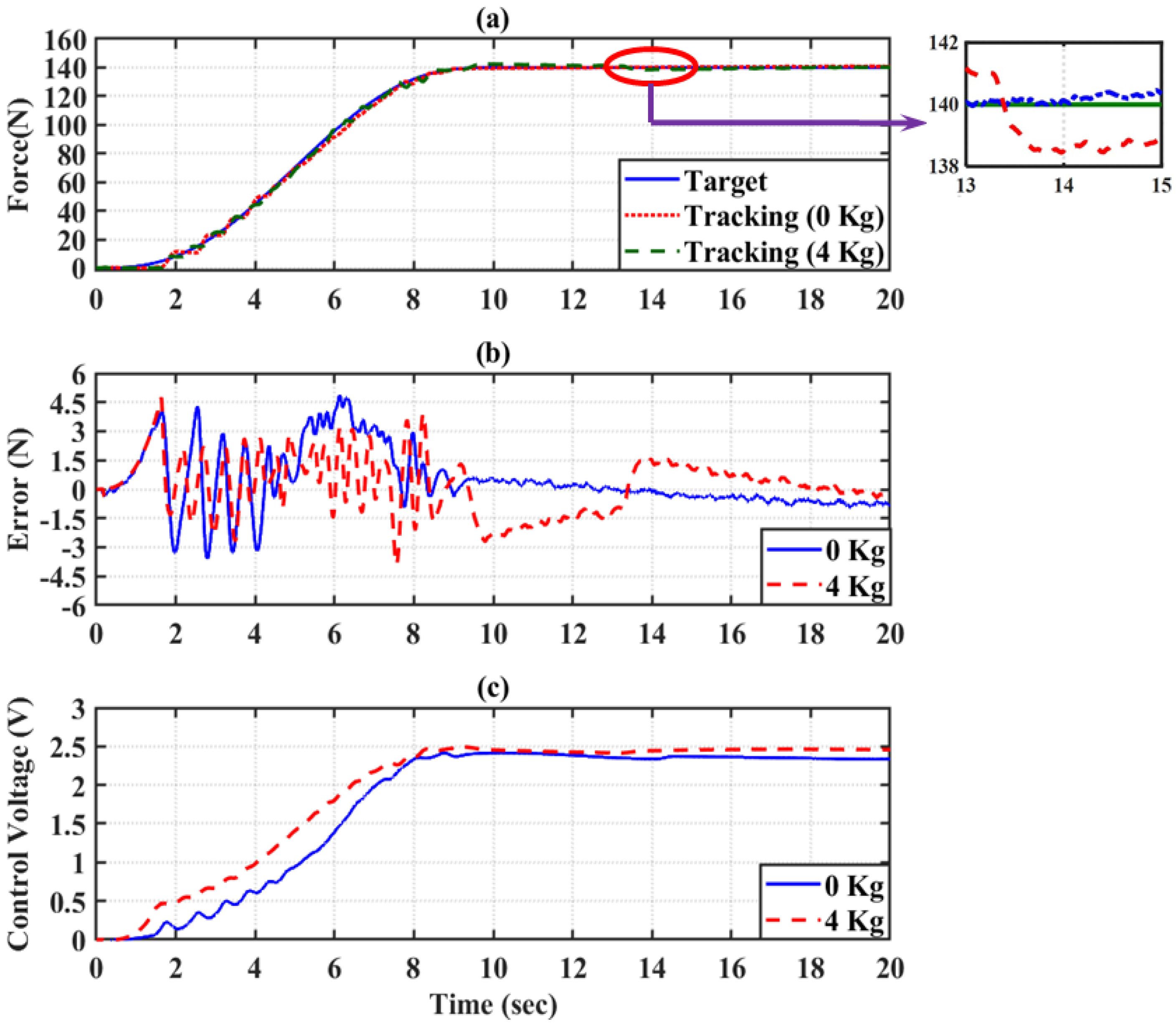
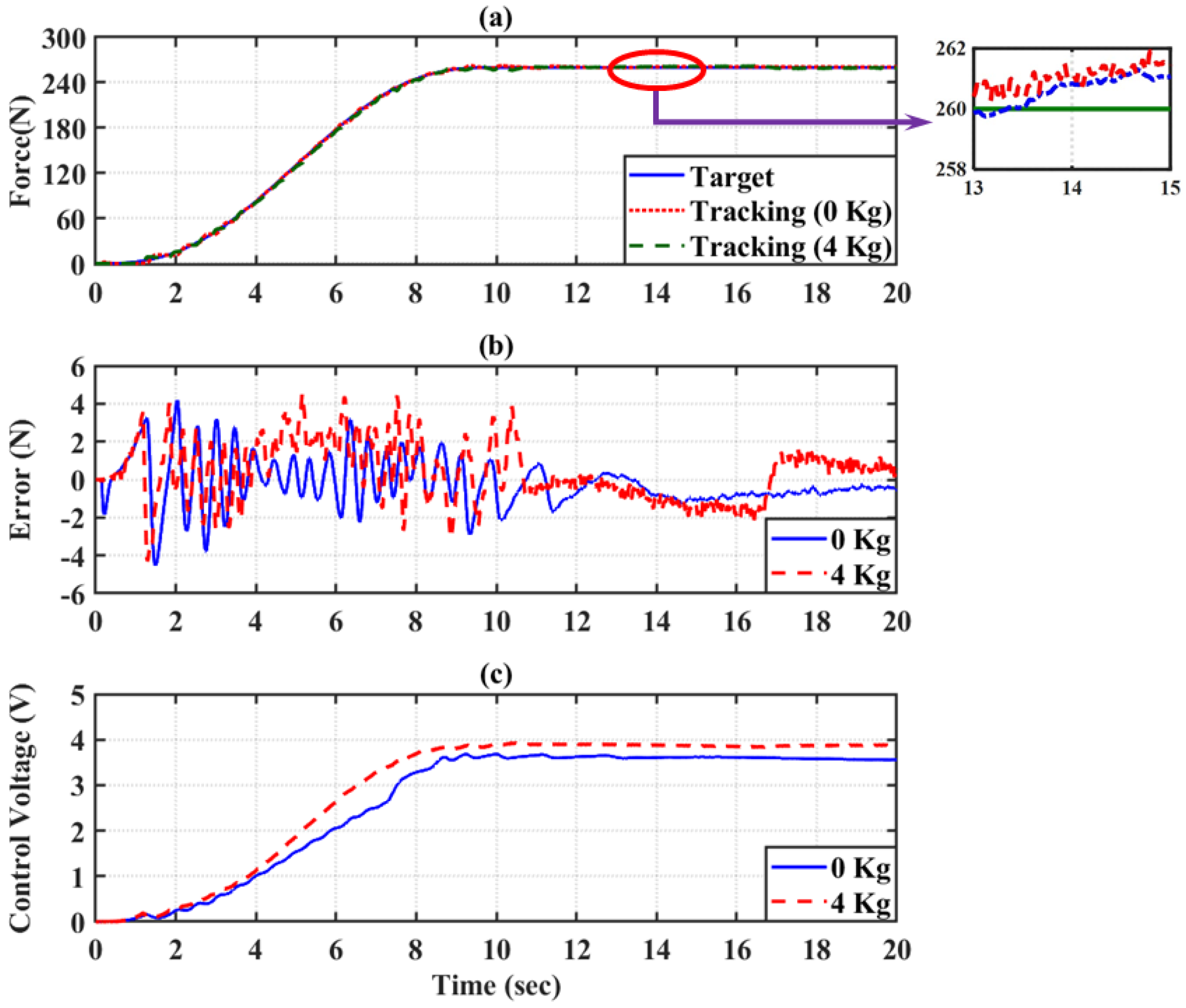
5.1. Power Assist Control Experiment
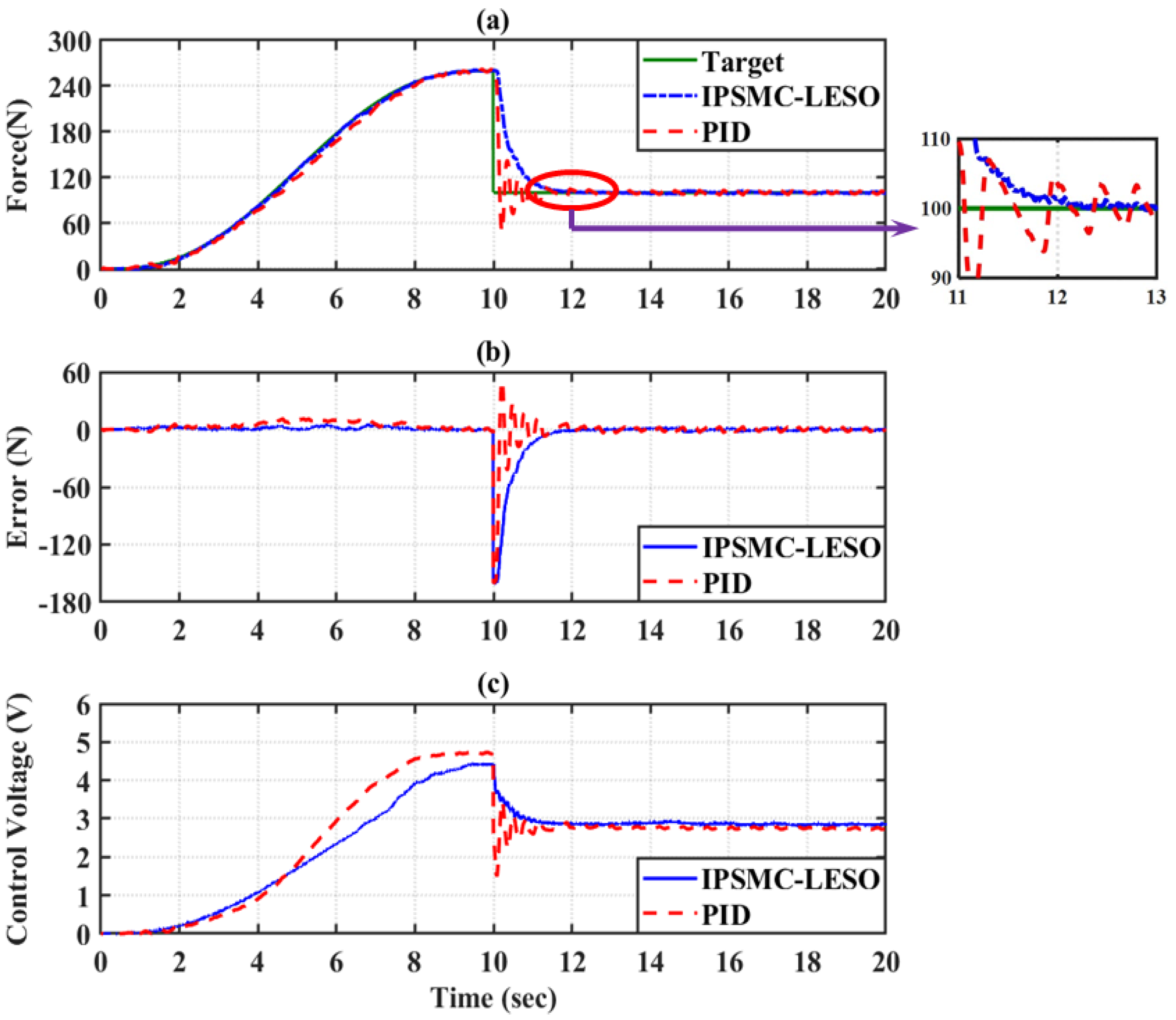
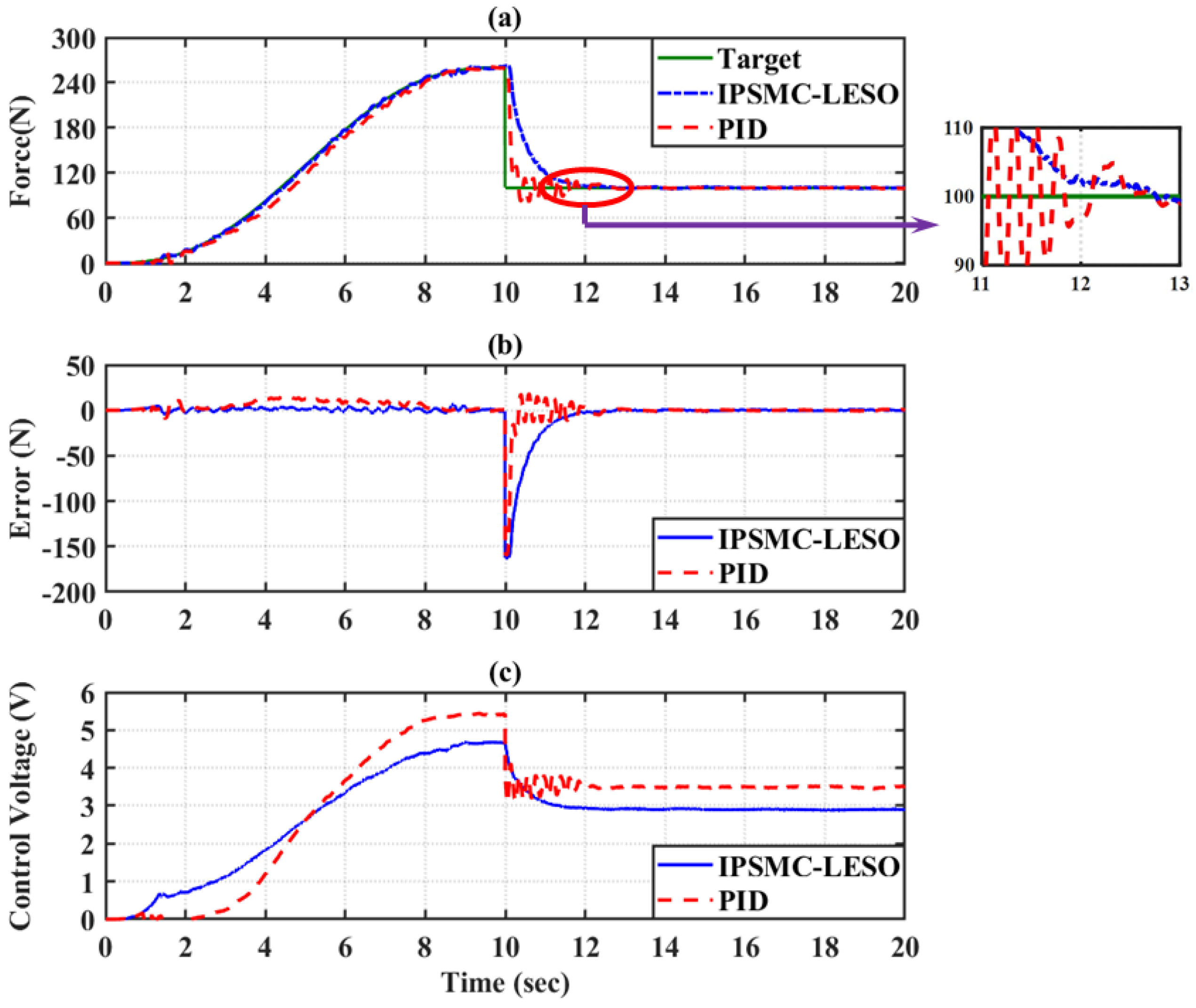
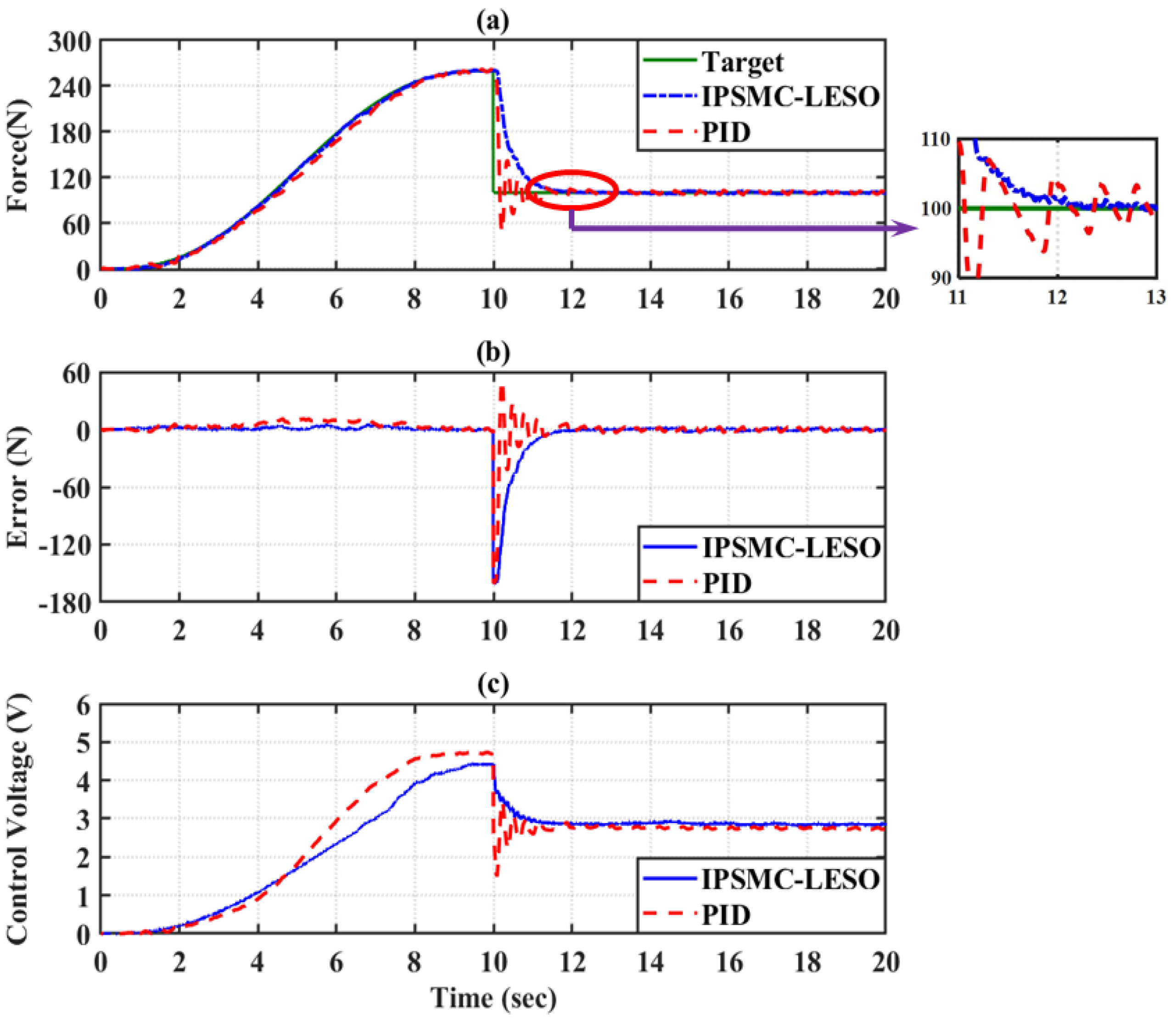
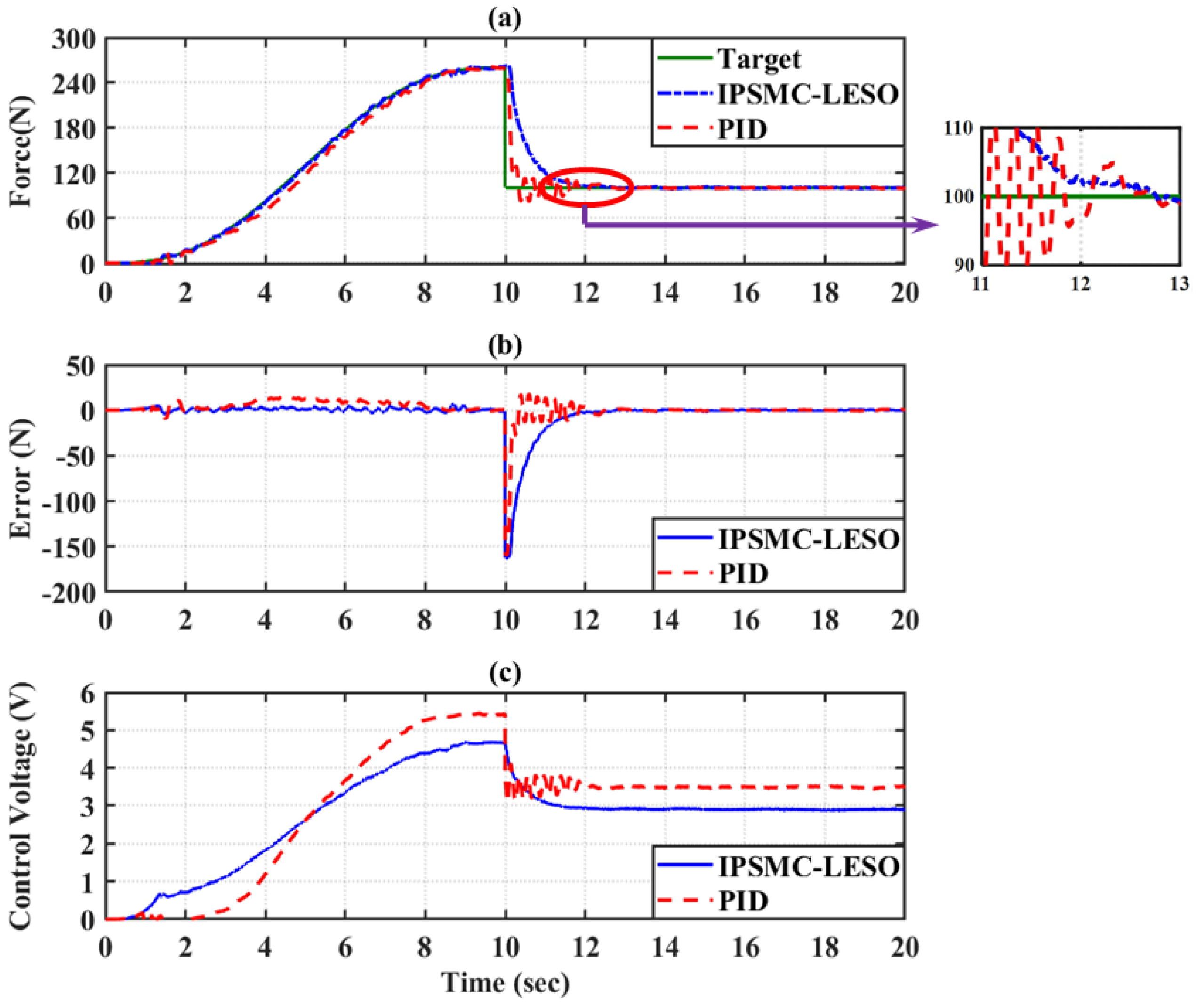
5.2. Discontinuity Recovery Performance Test and Comparison
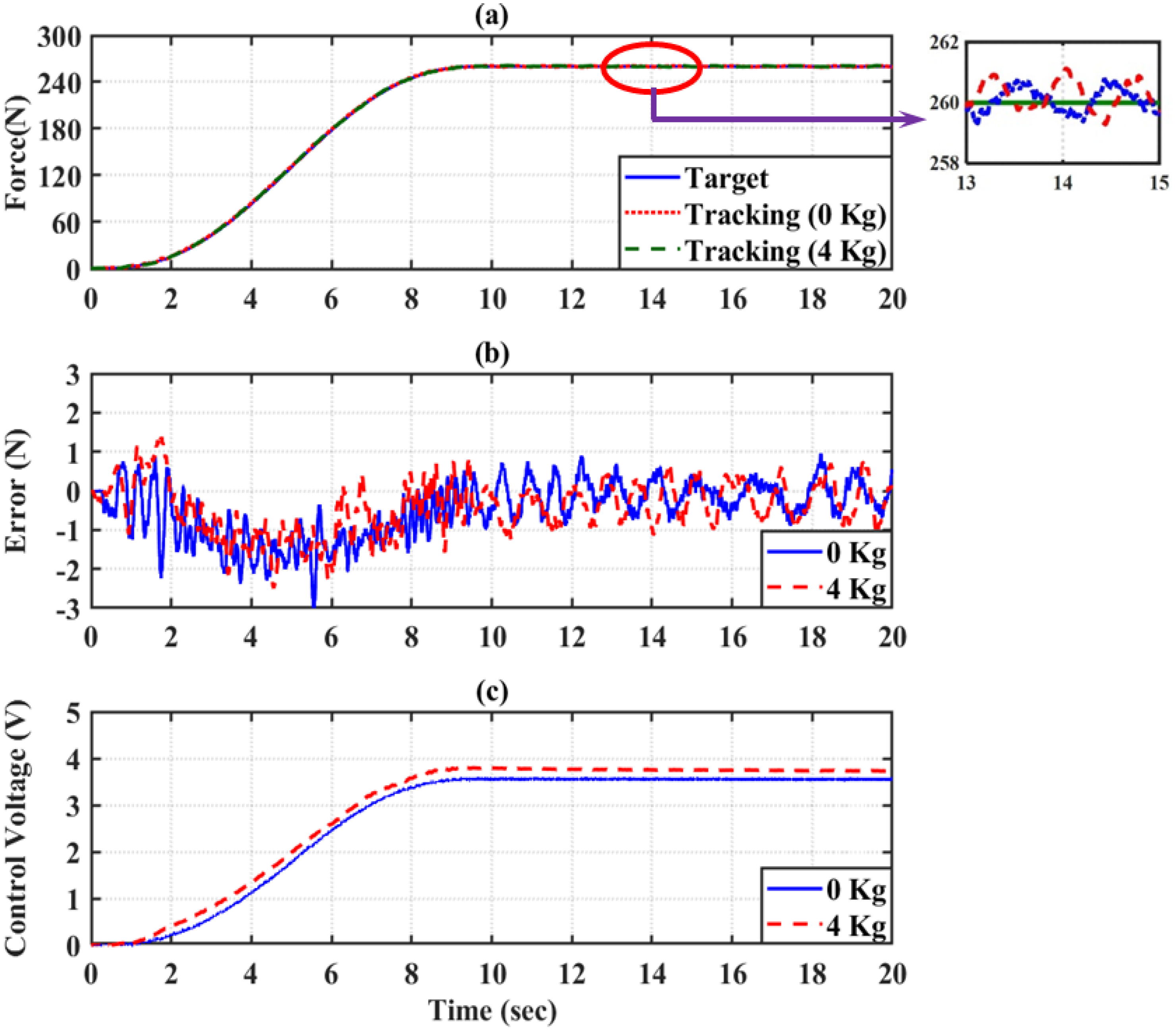
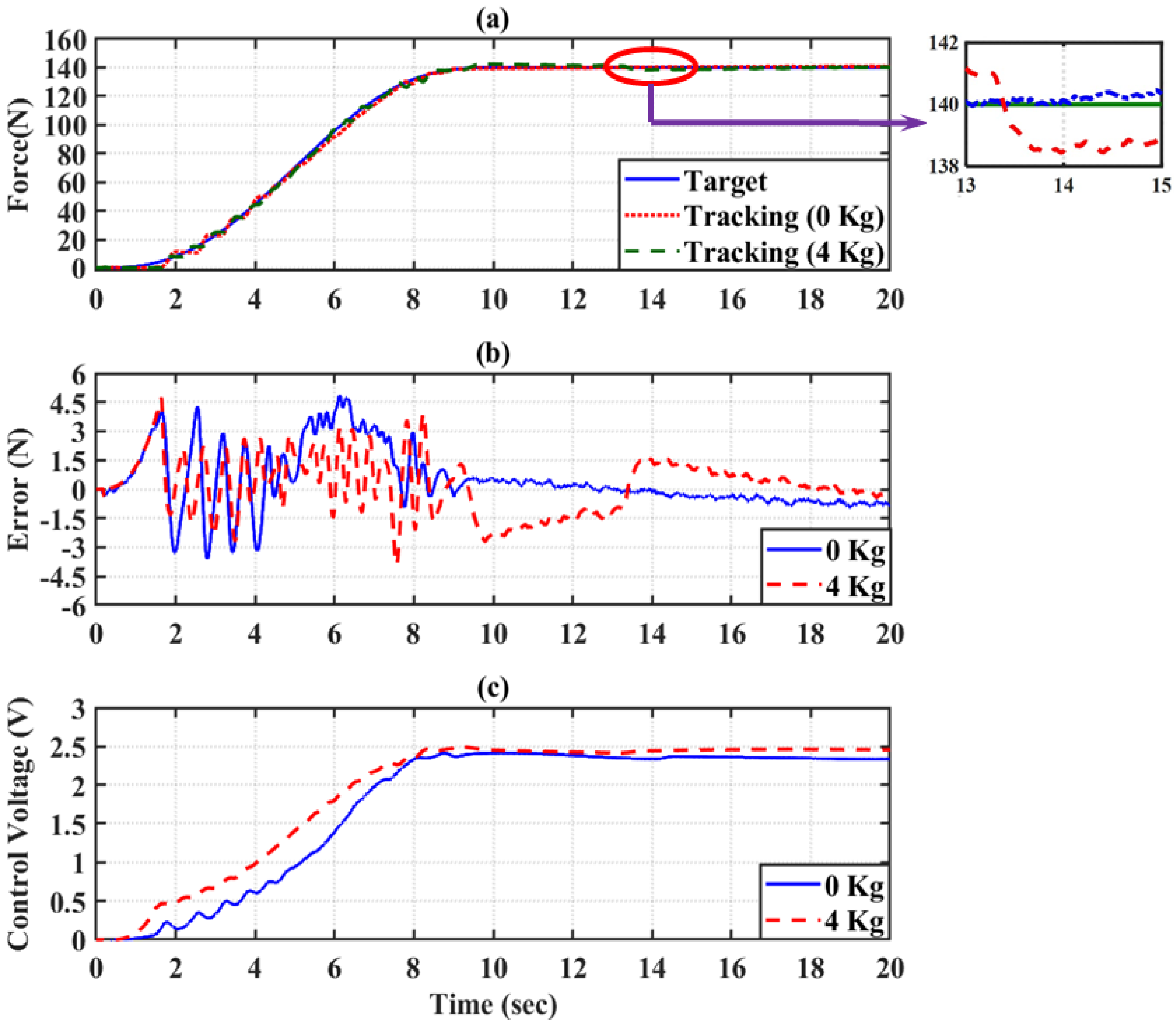
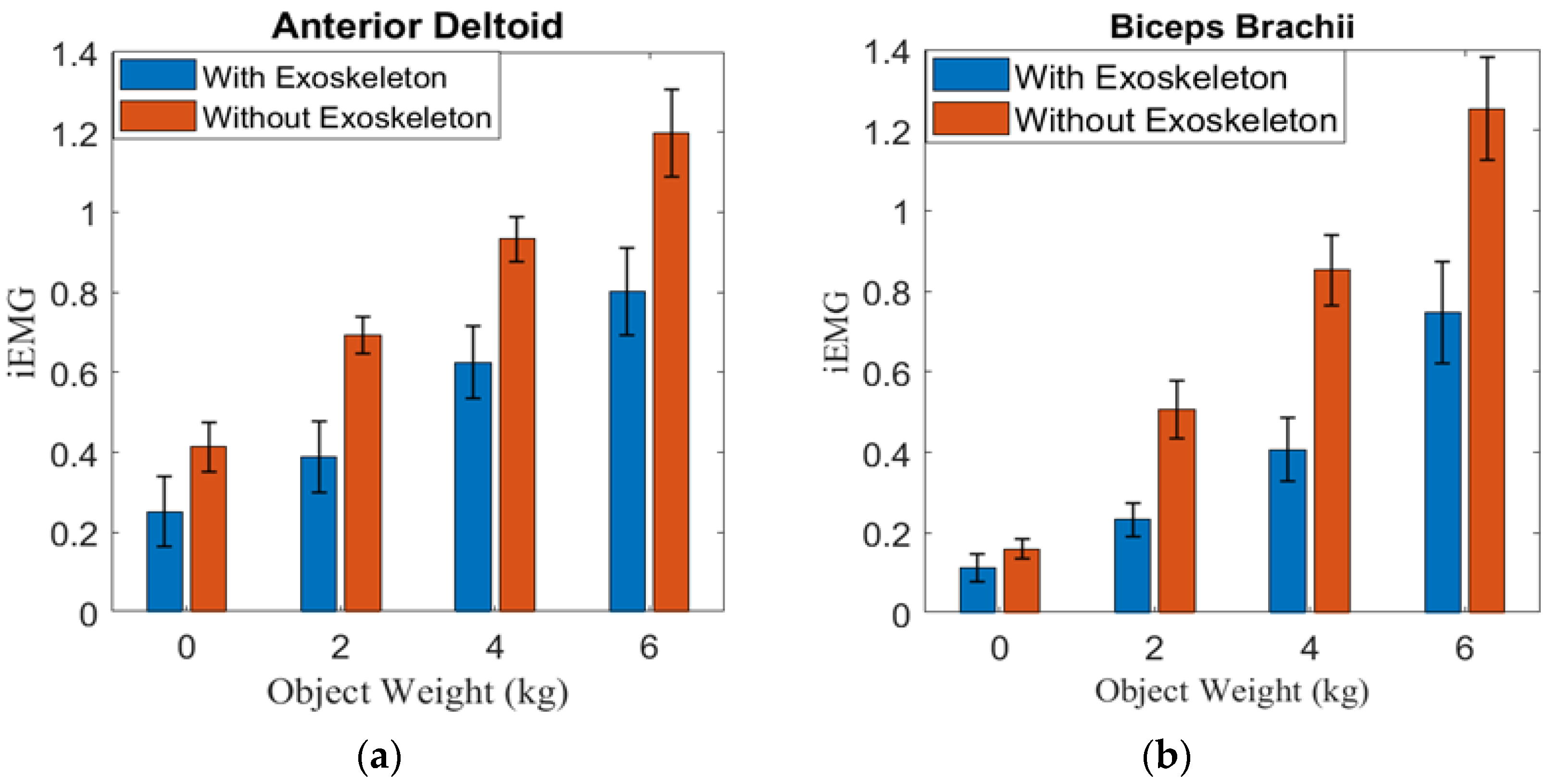
5.3. The Effect of Auxiliary Force
6. Conclusions
7. Patents
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- HSE. Work-Related Musculoskeletal Disorders Statistics in Great Britain; Health and Safety Executive: Bootle, UK, 2021. Available online: https://www.hse.gov.uk (accessed on 6 July 2022).
- Chen, Z.; Yan, L.; Pan, Y.; You, Z.; Chen, X. Ergonomics Guide for Prevention of Musculoskeletal Disorders; Institute of Labor, Occupational Safety and Health, Ministry of Labor: Taipei, Taiwan, 2014. [Google Scholar]
- BLI. Occupational Disease Cash Benefits under Labor Insurance by Cause and Industry; Bureau of Labor Insurance, Ministry of Labor: Taipei, Taiwan, China, 2021. Available online: https://www.bli.gov.tw/en/0015952.html (accessed on 6 July 2022).
- Chou, C.P.; Hannaford, B. Static and dynamic characteristics of McKibben pneumatic artificial muscles. In Proceedings of the 1994 IEEE International Conference on Robotics and Automation, San Diego, CA, USA, 8–13 May 1994; pp. 281–286. [Google Scholar]
- Caldwell, D.G.; Medrano-Cerda, G.A.; Goodwin, M. Control of pneumatic muscle actuators. IEEE Control. Syst. Mag. 1995, 15, 40–48. [Google Scholar]
- Chou, C.P.; Hannaford, B. Measurement and modeling of McKibben pneumatic artificial muscles. IEEE Trans. Robot. Autom. 1996, 12, 90–102. [Google Scholar] [CrossRef] [Green Version]
- Andrikopoulos, G.; Nikolakopoulos, G.; Manesis, S. A Survey on applications of Pneumatic Artificial Muscles. In Proceedings of the Mediterranean Conference on Control and Automation (MED), Aquis Corfu Holiday Palace, Corfu, Greece, 20–23 June 2011; pp. 1439–1446. [Google Scholar]
- Abe, T.; Koizumi, S.; Nabae, H.; Endo, G.; Suzumori, K.; Sato, N.; Adachi, M.; Takamizawa, F. Fabrication of “18 Weave” Muscles and Their Application to Soft Power Support Suit for Upper Limbs Using Thin McKibbenMuscle. IEEE Robot. Autom. Lett. 2019, 4, 2532–2538. [Google Scholar] [CrossRef]
- Ohta, P.; Valle, L.; King, J.; Low, K.; Yi, J.; Atkeson, C.G.; Park, Y.L. Design of a lightweight soft robotic arm using pneumatic artificial muscles and inflatable sleeves. Soft Robot. 2018, 5, 204–215. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tsagarakis, N.G.; Caldwell, D.G. Development and Control of a ‘Soft-Actuated’ Exoskeleton for Use in Physiotherapy and Training. Auton. Robot. 2003, 15, 21–33. [Google Scholar] [CrossRef]
- Chen, C.T.; Lien, W.Y.; Chen, C.T.; Twu, M.J.; Wu, Y.C. Dynamic Modeling and Motion Control of a Cable-Driven Robotic Exoskeleton with Pneumatic Artificial Muscle Actuators. IEEE Access 2020, 8, 149796–149807. [Google Scholar] [CrossRef]
- Chen, C.T.; Lien, W.Y.; Chen, C.T.; Wu, Y.C. Implementation of an upper-limb exoskeleton robot driven by pneumatic muscleactuators for rehabilitation. Actuators 2020, 9, 106. [Google Scholar] [CrossRef]
- Sugar, T.G.; He, J.; Koeneman, E.J.; Koeneman, J.B.; Herman, R.; Huang, H.; Schultz, R.S.; Herring, D.E.; Wanberg, J.; Balasubramanian, S.; et al. Design and control of RUPERT: A device for roboticupper extremity repetitive therapy. IEEE Trans. Neural Syst. Rehabil. Eng. 2007, 15, 336–346. [Google Scholar] [CrossRef]
- Wei, R.; Balasubramanian, S.; Xu, L.; He, J. Adaptive iterative learning control design for RUPERT IV. In Proceedings of the 2nd IEEE RAS—EMBS International Conference on Biomedical Robotics and Biomechatronics, Scottsdale, AZ, USA, 19–22 October 2008; pp. 647–652. [Google Scholar]
- Chen, S.H.; Lien, W.M.; Wang, W.W.; Lee, G.D.; Hsu, L.C.; Lee, K.-W.; Lin, S.-Y.; Lin, C.-H.; Fu, L.-C.; Lai, J.-S.; et al. Assistive Control System for Upper Limb Rehabilitation Robot. IEEE Trans. Neural Syst. Rehabil. Eng. 2016, 24, 1199–1209. [Google Scholar] [CrossRef]
- Benamor, A.; Messaoud, H. Robust adaptive sliding mode control for uncertain systems with unknown time-varying delay input. ISA Trans. 2018, 79, 1–12. [Google Scholar] [CrossRef]
- Pan, Y.; Yang, C.; Pan, L.; Yu, H. Integral sliding mode control: Performance, modification, and improvement. IEEE Trans. Ind. Inform. 2018, 14, 3087–3096. [Google Scholar] [CrossRef]
- Kikuuwe, R.; Yasukouchi, S.; Fujimoto, H.; Yamamoto, M. Proxy-based sliding mode control: A safer extension of PID position control. IEEE Trans. Robot. 2010, 26, 670–683. [Google Scholar] [CrossRef]
- Chen, G.; Zhou, Z.; Vanderborght, B.; Wang, N.; Wang, Q. Proxy-based sliding mode control of a robotic ankle-foot system for post-stroke rehabilitation. Adv. Robot. 2016, 30, 992–1003. [Google Scholar] [CrossRef]
- Gu, G.Y.; Zhu, L.M.; Su, C.Y.; Ding, H.; Fatikow, S. Proxy-based sliding-mode tracking control of piezoelectric-actuated nanoposi tioning stages. IEEE/ASME Trans. Mechatron. 2015, 20, 1956–1965. [Google Scholar] [CrossRef]
- Huo, W.; Paniagua, V.A.; Ding, G.; Amirat, Y.; Mohammed, S. Adaptive proxy-based controller of an active ankle foot orthosis to assist lower limb movements of paretic patients. Robotica 2019, 37, 2147–2164. [Google Scholar] [CrossRef]
- Huang, J.; Cao, Y.; Wang, Y.W. Adaptive proxy-based sliding mode control for a class of second-order nonlinear systems and its application to pneumatic muscle actuators. ISA Trans. 2022, 124, 395–402. [Google Scholar] [CrossRef]
- Peng, Z.; Huang, J. Improved Proxy-based Sliding Mode Control Integrated Adaptive Dynamic Programming for Pneumatic Muscle Actuators. In Proceedings of the 2021 6th IEEE International Conference on Advanced Robotics and Mechatronics (ICARM), Chongqing, China, 3–5 July 2021; pp. 424–429. [Google Scholar]
- Mu, C.; Tang, Y.; He, H. Improved Sliding Mode Design for Load Frequency Control of Power System Integrated an Adaptive Learning Strategy. IEEE Trans. Ind. Electron. 2017, 64, 6742–6751. [Google Scholar] [CrossRef]
- Mu, C.; Ni, Z.; Sun, C.; He, H. Air-breathing hypersonic vehicle tracking control based on adaptive dynamic programming. IEEE Trans. Neural Netw. Learn. Syst. 2017, 28, 584–598. [Google Scholar] [CrossRef]
- Han, X.; Zheng, Z.; Liu, L. Online policy iteration ADP-based attitude-tracking control for hypersonic vehicles. Aerosp. Sci. Technol. 2020, 106, 106233. [Google Scholar] [CrossRef]
- Lee, L.W.; Lu, L.Y.; Li, I.H.; Lee, C.W.; Su, T.J. Design and Control of 6-DOF Robotic Manipulator Driven by Pneumatic Muscles and Motor. Sens. Mater. 2021, 33, 3081–3100. [Google Scholar] [CrossRef]
- Zhao, W.; Song, A.; Cao, Y. An Extended Proxy-Based Sliding Mode Control of Pneumatic Muscle Actuators. Appl. Sci. 2019, 9, 1571. [Google Scholar] [CrossRef] [Green Version]
- Han, J. The “Extended State Observer” of a Class of Uncertain Systems. Control. Decis. 1995, 10, 85–88. [Google Scholar]
- Guo, B.Z.; Zhao, Z.L. On the convergence of an extended state observer for nonlinear systems with uncertainty. Syst. Control. Lett. 2011, 60, 420–430. [Google Scholar] [CrossRef]
- Gao, Z. Scaling and bandwidth-parameterization based controller tuning. In Proceedings of the American Control Conference, Denver, CO, USA, 4–6 June 2003; pp. 4989–4996. [Google Scholar]
- Guo, B.Z.; Zhao, Z.L. On Convergence of Non-Linear Extended State Observer for Multi-Input Multi-Output Systems with Uncertainty. IET Control. Theory Appl. 2012, 6, 2375–2386. [Google Scholar] [CrossRef] [Green Version]
- Toxiri, S.; Koopman, A.S.; Lazzaroni, M.; Ortiz, J.; Power, V.; de Looze, M.P.; O’Sullivan, L.; Caldwell, D.G. Rationale, implementation and evaluation of assistive strategies for an active back-support exoskeleton. Front. Robot. AI 2018, 5, 53. [Google Scholar] [CrossRef] [Green Version]
- Rossini, M.; De Bock, S.; van der Have, A.; Flynn, L.; Rodriguez-Cianca, D.; de Pauw, K.; Lefeber, D.; Geeroms, J.; Rodriguez-Guerrero, C. Design and Evaluation of a Passive Cable-Driven Occupational Shoulder Exoskeleton. IEEE Trans. Med. Robot. Bionics 2021, 3, 1020–1031. [Google Scholar] [CrossRef]
- Ugurlu, B.; Nishimura, M.; Hyodo, K.; Kawanishi, M.; Narikiyo, T. Proof of Concept for Robot-Aided Upper Limb Rehabilitation Using Disturbance Observers. IEEE Trans. Hum. Mach. Syst. 2015, 45, 110–118. [Google Scholar] [CrossRef]
- Yan, Z.; Yi, H.; Huang, T.; Han, B.; Zhang, L.; Peng, A.; Wu, X. Development of An Assist Upper Limb Exoskeleton For Manual Handling Task. In Proceedings of the IEEE International Conference on Robotics and Biomimetics (ROBIO), Dali, China, 6–8 December 2019; pp. 1815–1820. [Google Scholar]
- Winter, D.A. Biomechanics and Motor Control of Human Movement, 4th ed.; John Wiley & Sons: Waterloo, ON, Canada, 2009; pp. 82–83. [Google Scholar]
- Lee, L.W.; Chiang, H.H.; Li, I.H. Performance Improvement of Active MacPherson Suspension Using a Pneumatic Muscle and an Intelligent Vibration Compensator. IEEE Access 2020, 8, 34080–34095. [Google Scholar] [CrossRef]
- Liang, J.L. Design and Control of a 1-DOF Forearm Robotic System Driven by Pneumatic Artificial Muscle Actuator. Master’s Thesis, Department of Engineering Science and Ocean Engineering, National Taiwan University, Taipei, Taiwan, 29 July 2013. [Google Scholar]
- Lee, L.W.; Li, I.H.; Lu, L.Y.; Hsu, Y.B.; Chiou, S.J.; Su, T.J. Hardware Development and Safety Control Strategy Design for a Mobile Rehabilitation Robot. Appl. Sci. 2022, 12, 5979. [Google Scholar] [CrossRef]
- Xu, B.; Ji, S.; Zhang, C.; Chen, C.; Ni, H.; Wu, X. Linear-extended-state-observer-based prescribed performance control for trajec tory tracking of a robotic manipulator. Ind. Robot. 2021, 48, 544–555. [Google Scholar] [CrossRef]
- Zhao, L.; Zheng, C.; Wang, Y.; Liu, B. A Finite-Time Control for a Pneumatic Cylinder Servo System Based on a Super-Twisting Extended State Observer. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 1164–1173. [Google Scholar] [CrossRef]
- Wu, Q.; Yu, L.; Wang, Y.W.; Zhang, W.A. LESO-based position synchronization control for networked multi-axis servo systems with time-varying delay. IEEE/CAA J. Autom. Sin. 2020, 7, 1116–1123. [Google Scholar] [CrossRef]
- Liu, S.-W. Design and Control of Wearable Waist-Assistive Exoskeleton System. Master’s Thesis, Department of Mechanical Engineering, National Chung Hsing University, Taichung, Taiwan, 31 July 2020. [Google Scholar]
- Klussmann, A.; Steinberg, U.; Liebers, F.; Gebhardt, H.; Rieger, M.A. The Key Indicator Method for Manual Handling Operations (KIM-MHO)-evaluation of a new method for the assessment of working conditions within a cross-sectional study. BMC Musculoskelet. Disord. 2010, 11, 272. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Guo, S.; Pang, M.; Gao, B.; Hirata, H.; Ishihara, H. Comparison of sEMG-Based Feature Extraction and Motion Classification Methods for Upper-Limb Movement. Sensors 2015, 15, 9022–9038. [Google Scholar] [CrossRef]
- Christopher, S.; MdRasedul, I.; Md, A.Z.; Mohammad, H.R. A Comprehensive Study on EMG Feature Extraction and Classifiers. Open Access J. Biomed. Eng. Biosci. 2018, 1, 17–26. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value | Unit |
|---|---|---|
| Center diameter | 30.7 | mm |
| Wire diameter | 3.5 | mm |
| Installation angle | −17 | degree |
| Working angle | 90 | degree |
| Free angle | 110 | degree |
| Working torque | 3927 | |
| Installation torque | 741.7 | |
| Number of laps | 6.2 | loop |
| Component | Brand | Model | Specifications |
|---|---|---|---|
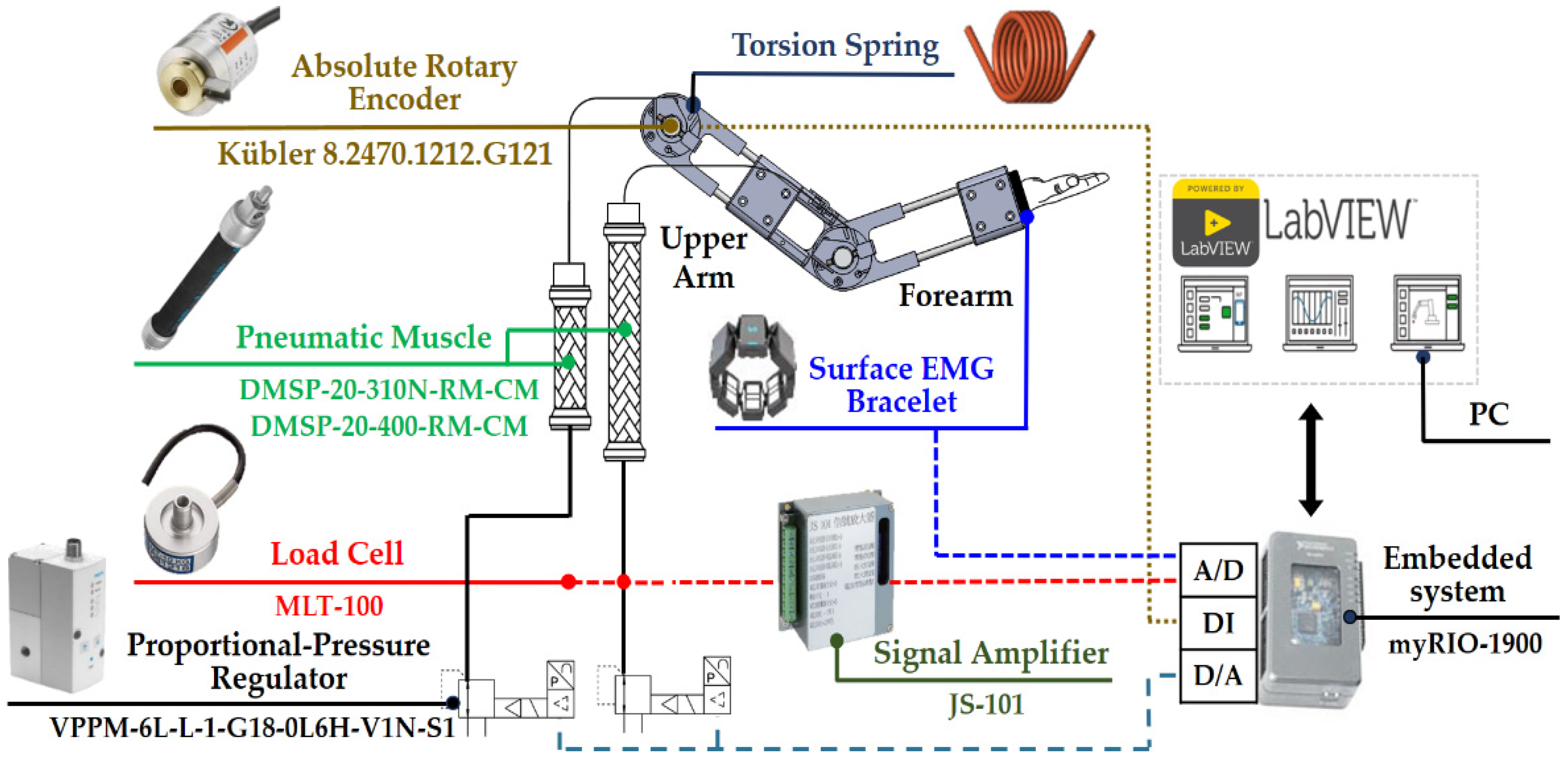
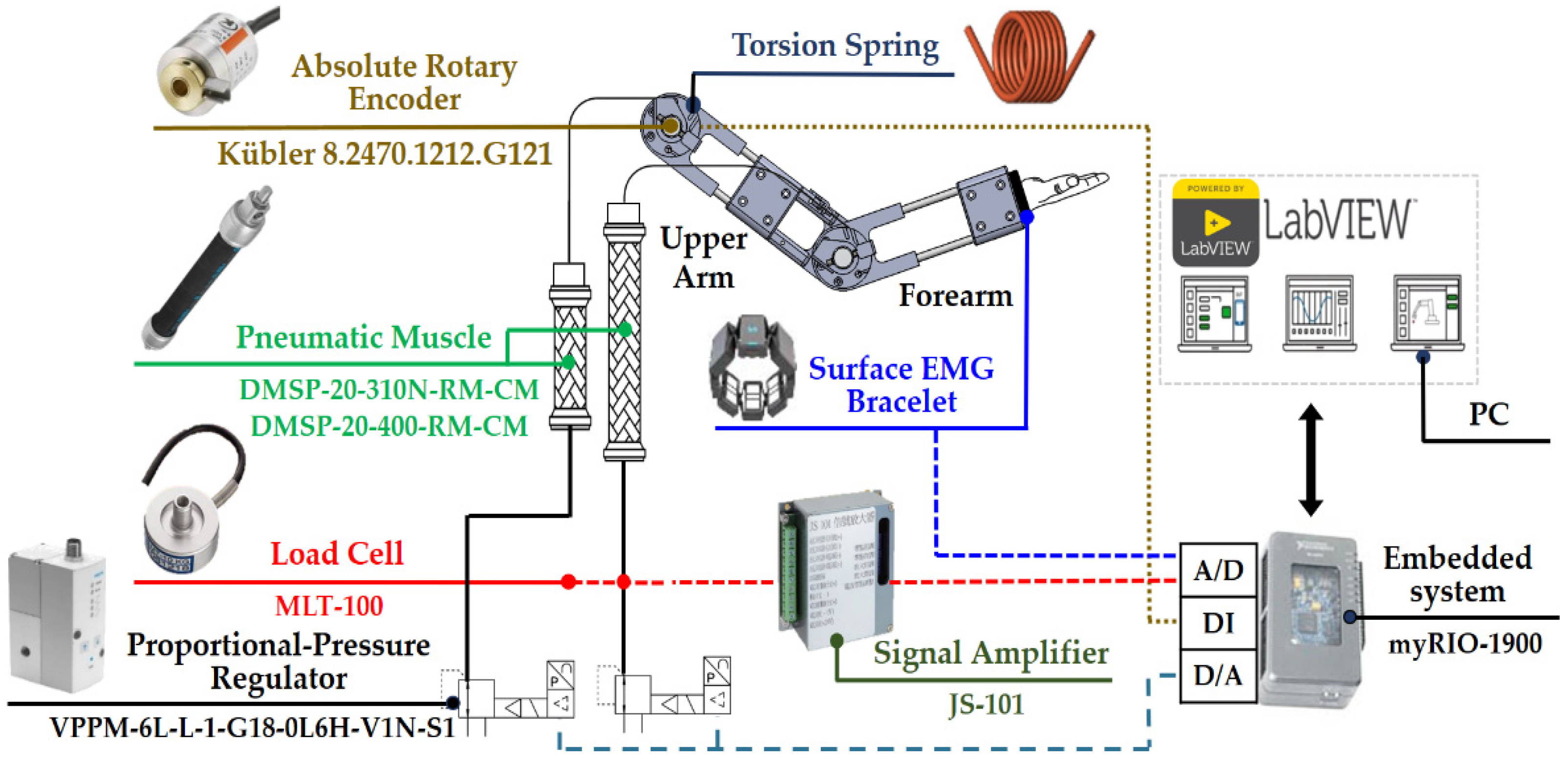
| Pneumatic muscle Actuator (shoulder joint) | FESTO | DMSP-20-310N-RM-CM | Allowable pressure: 0–6 bar Length: 310 mm Diameter: 20 mm |
| Pneumatic muscle Actuator (elbow joint) | FESTO | DMSP-20-400N-RM-CM | Allowable pressure: 0–6 bar Length: 400 mm Diameter: 20 mm |
| Proportional-pressure regulator | FESTO | VPPM-6L-L-1-G18- 0L6H-V1N-S1 | Output pressure: 0~6 bar Input voltage: 0~10 V Supply voltage: 24 VDC |
| Signal amplifier | JIHSENSE | JS-101 | Amplified output: 0–10 V Supply voltage: 24 VDC |
| Load cell | JIHSENSE | MLT-100 | Rated output: 1 mV/V Allowable load: 100 kg Maximum input voltage: 7.5 V |
| Absolute rotary encoder | Kübler | 8.2470.1212.G121 | Maximum output frequency: 750 kHz Supply voltage: 5 VDC |
| Surface EMG bracelet | Thalmic Labs | Myo-Armband | Resolution: 8 bit Sampling frequency: 200 Hz |
| Embedded controller | National Instruments | myRIO-1900 | Analog input: 10 channels Analog output: 6 channels RAM: 256 MB Supply voltage: 6–16 VDC |
| Shoulder joint | 270 | 0.45 | 12 | 5000 | 1000 | 40 | 80 | 1600 |
| Elbow joint | 900 | 1.05 | 12 | 5000 | 1000 | 43 | 85 | 2400 |
| Weight (N) | Max. Absolute Error (N) | Root Mean Square Error (N) | |
|---|---|---|---|
| Shoulder flexion | 140 | 2.45 | 0.71 |
| 260 | 3.12 | 0.78 | |
| Elbow flexion | 140 | 4.87 | 1.58 |
| 260 | 4.56 | 1.18 |
| Key Indicators | Score | Description |
|---|---|---|
| Time Rating Points | 3 | 5 h |
| Frequency of Executing Forces | 4 | High Load/Hold Time: 15 s/min. |
| Gripping Conditions | 2 | Long Tube without Handle. |
| Arm Position and Movement | 3 | No Good, Endure Prolonged Static Holding with the Arm. |
| Work Organization | 1 | Loading Conditions Rarely Change. |
| Working Conditions | 1 | Restricted, Poor Environment and Ventilation. |
| Body Posture | 4 | Bad, Torso is Obviously Bent. |
| Total | 45 | Medium or High Load, Suggestions for Work Improvement. |
| Weight (N) | Max. Absolute Error (N) | Root Mean Square Error (N) | |
|---|---|---|---|
| Shoulder flexion | 140 | 2.17 | 0.68 |
| 260 | 2.50 | 0.77 | |
| Elbow flexion | 140 | 4.73 | 1.38 |
| 260 | 4.53 | 1.52 |
| Shoulder | 0.0123 | 0.0019 | 0.0001 |
| Elbow | 0.0104 | 0.002 | 0.001 |
| Data | Subject 1 | Subject 2 | Subject 3 | Subject 4 |
|---|---|---|---|---|
| Height (cm) | 178 | 173 | 179 | 169 |
| Weight (kg) | 72 | 69 | 86 | 58 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chu, H.-R.; Chiou, S.-J.; Li, I.-H.; Lee, L.-W. Design, Development, and Control of a Novel Upper-Limb Power-Assist Exoskeleton System Driven by Pneumatic Muscle Actuators. Actuators 2022, 11, 231. https://doi.org/10.3390/act11080231
Chu H-R, Chiou S-J, Li I-H, Lee L-W. Design, Development, and Control of a Novel Upper-Limb Power-Assist Exoskeleton System Driven by Pneumatic Muscle Actuators. Actuators. 2022; 11(8):231. https://doi.org/10.3390/act11080231
Chicago/Turabian StyleChu, Hsien-Ru, Shean-Juinn Chiou, I-Hsum Li, and Lian-Wang Lee. 2022. "Design, Development, and Control of a Novel Upper-Limb Power-Assist Exoskeleton System Driven by Pneumatic Muscle Actuators" Actuators 11, no. 8: 231. https://doi.org/10.3390/act11080231
APA StyleChu, H.-R., Chiou, S.-J., Li, I.-H., & Lee, L.-W. (2022). Design, Development, and Control of a Novel Upper-Limb Power-Assist Exoskeleton System Driven by Pneumatic Muscle Actuators. Actuators, 11(8), 231. https://doi.org/10.3390/act11080231