
Characterization of LCR Parallel-Type Electromagnetic Shunt Damper for Superconducting Magnetic Levitation



Abstract
:1. Introduction
2. Theoretical Studies
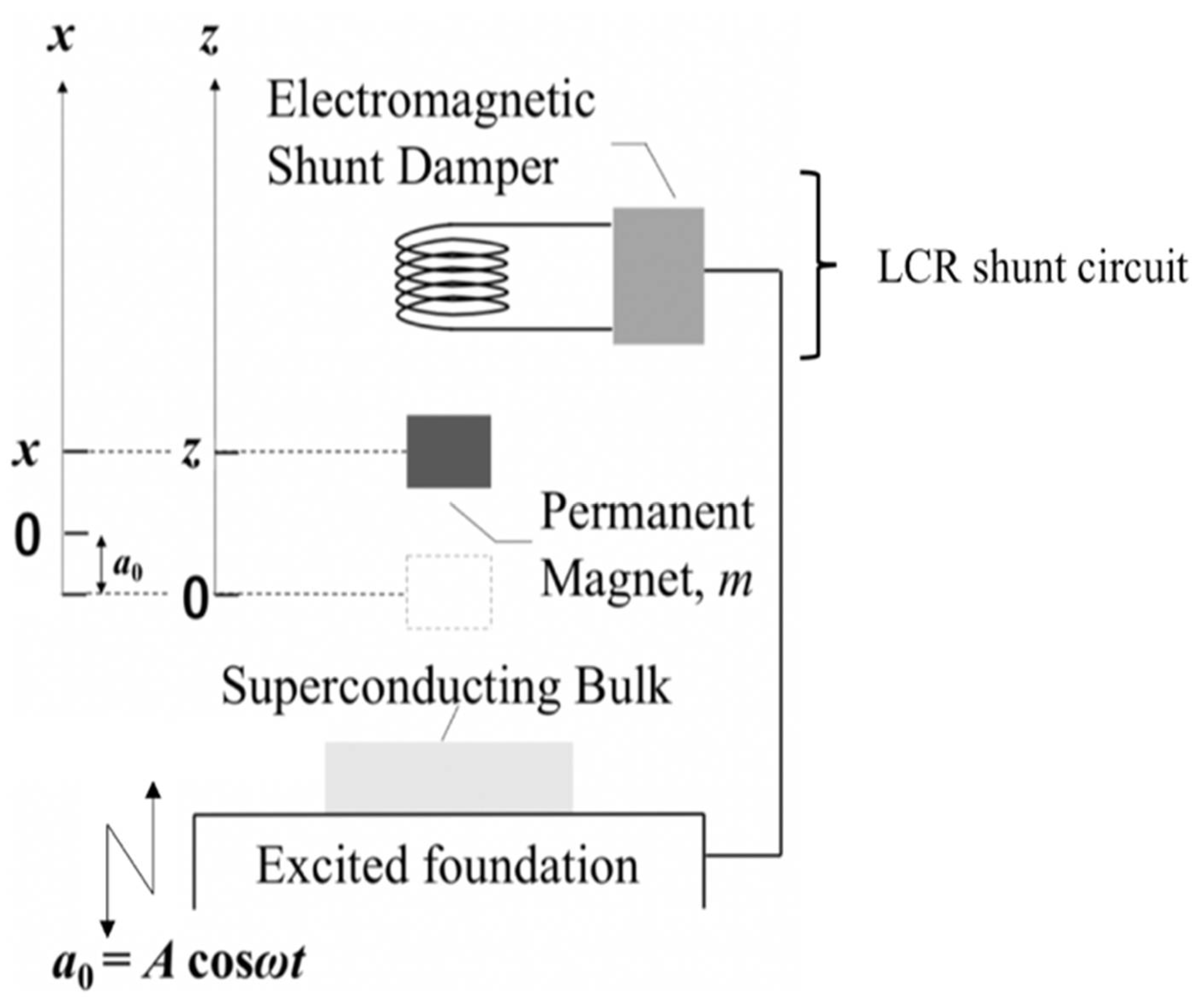
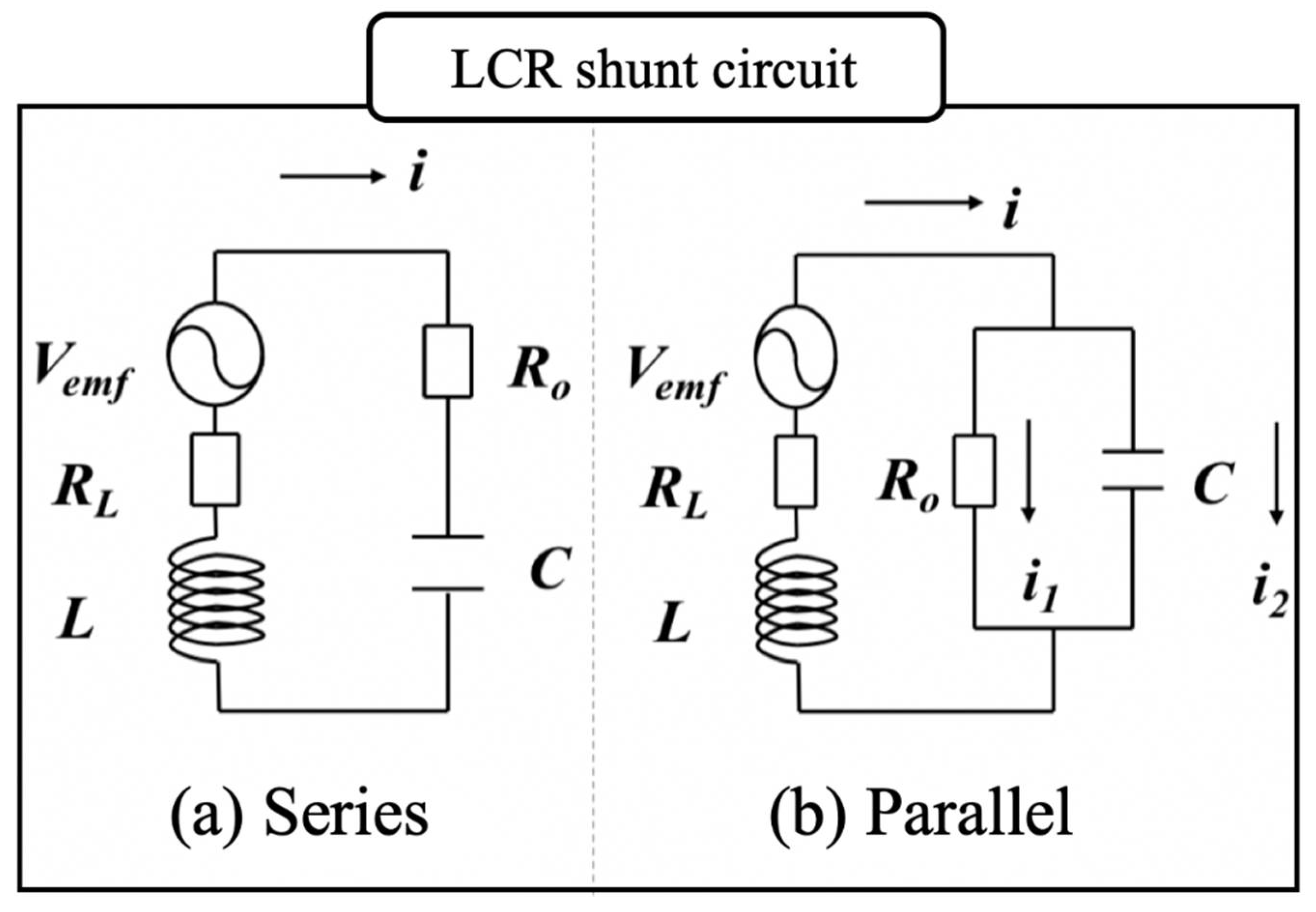
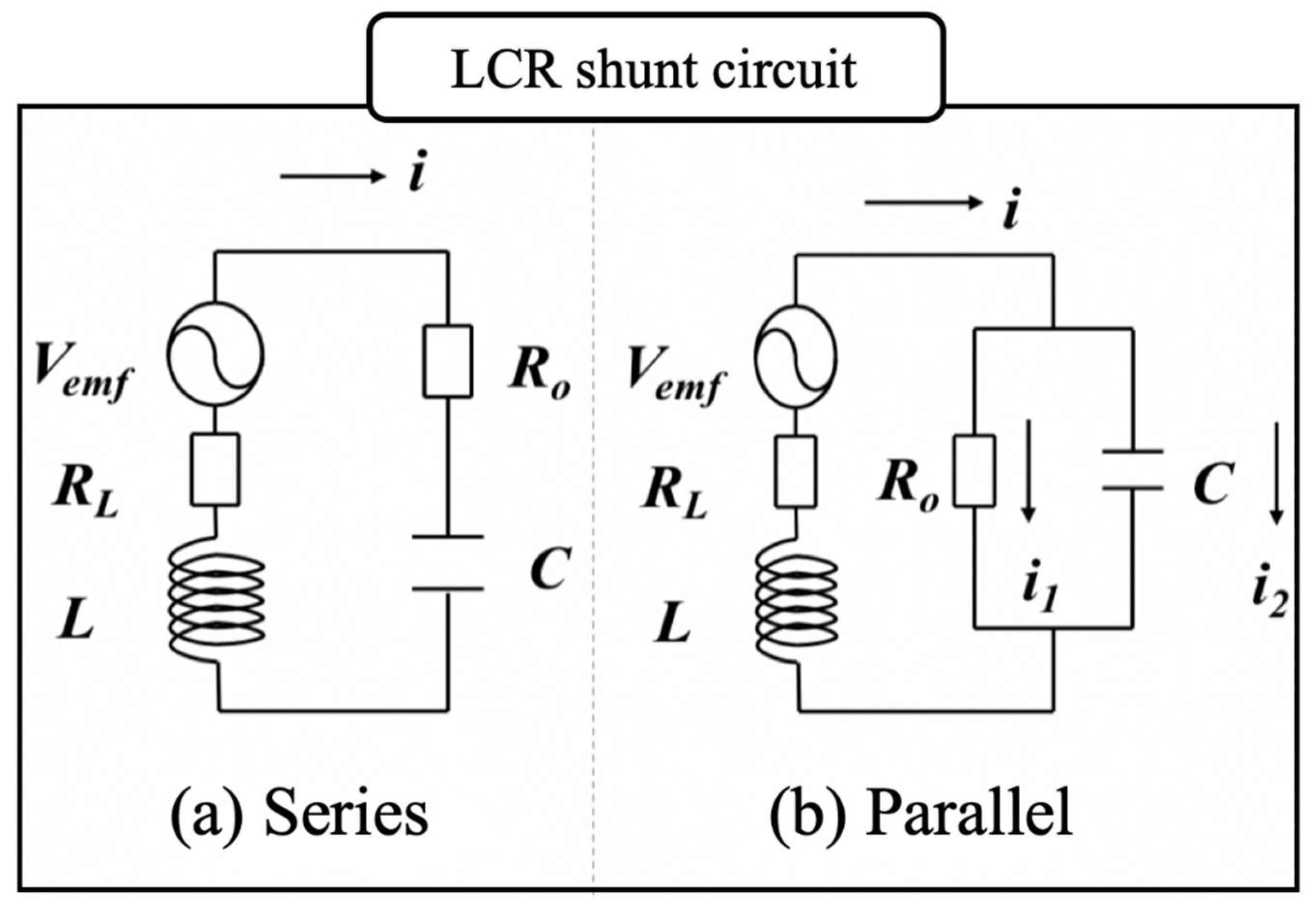
2.1. Modeling, Mechanism, and Governing Equations
2.2. Numerical Integrations
2.3. Some Discussions
3. Experimental Verification of Primary Resonance Suppression
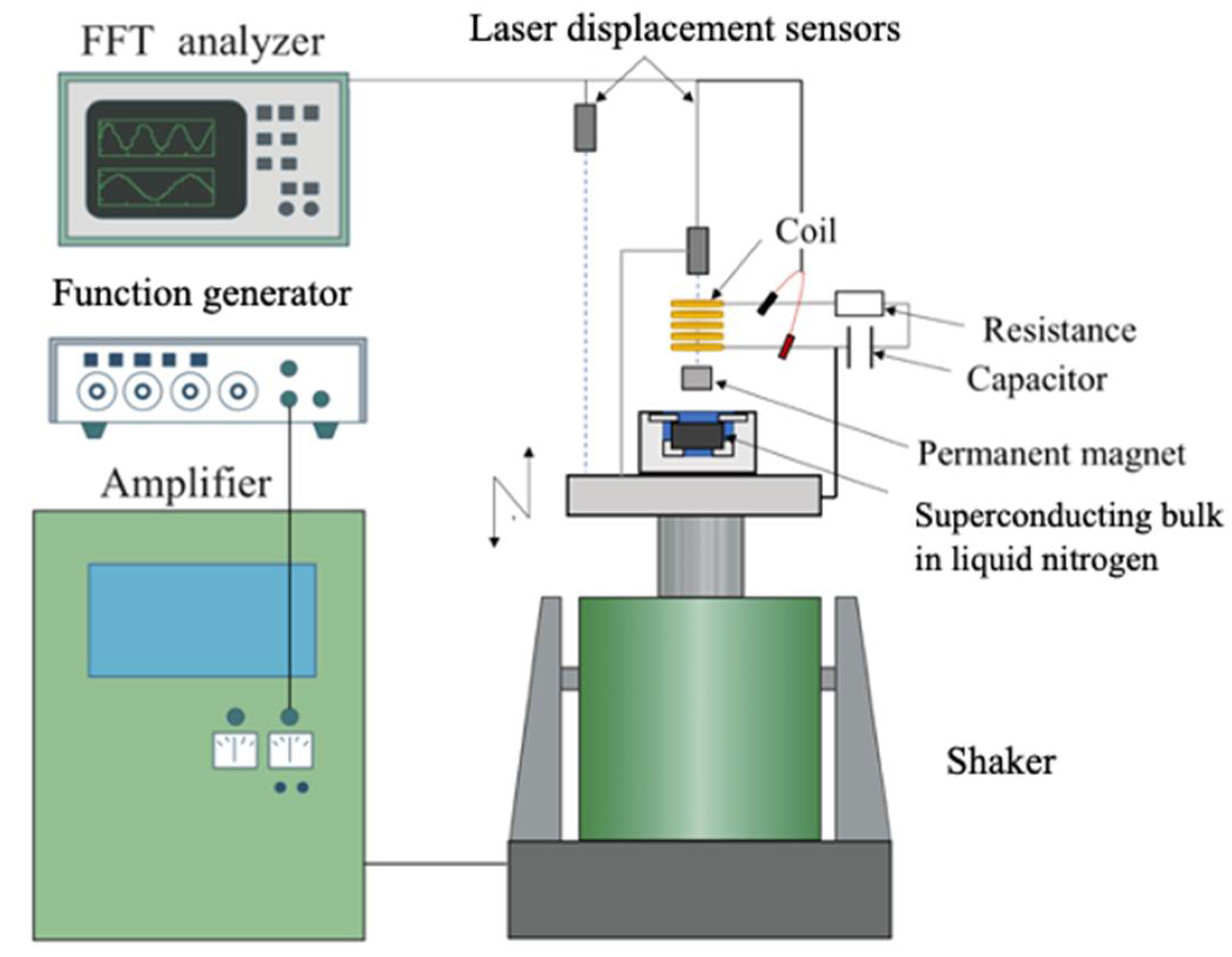
3.1. Experimental Setup and Measurement Method
3.2. Experimental Results
4. Numerical Prediction of Nonlinear Resonance Suppression
5. Conclusions
- (1)
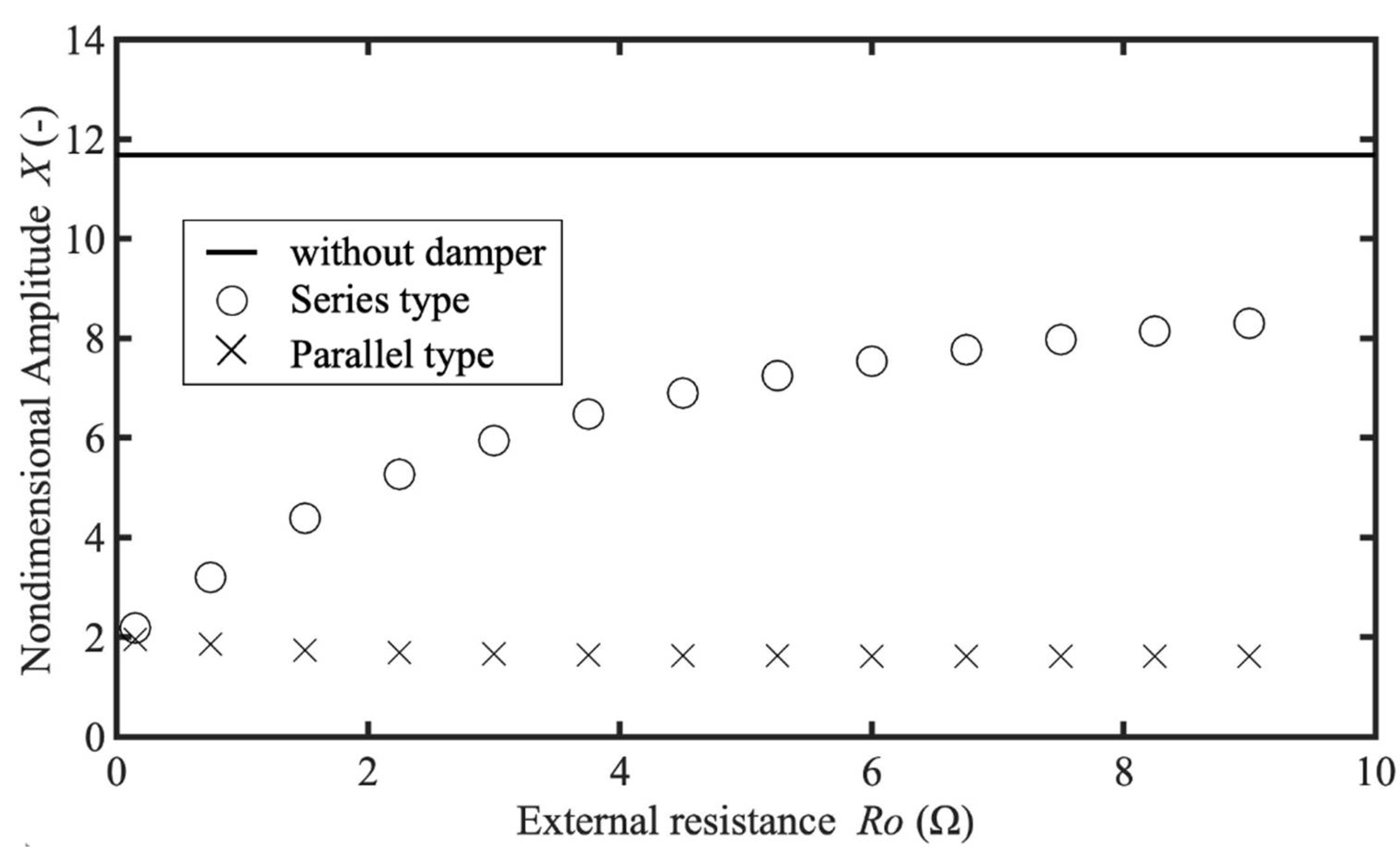
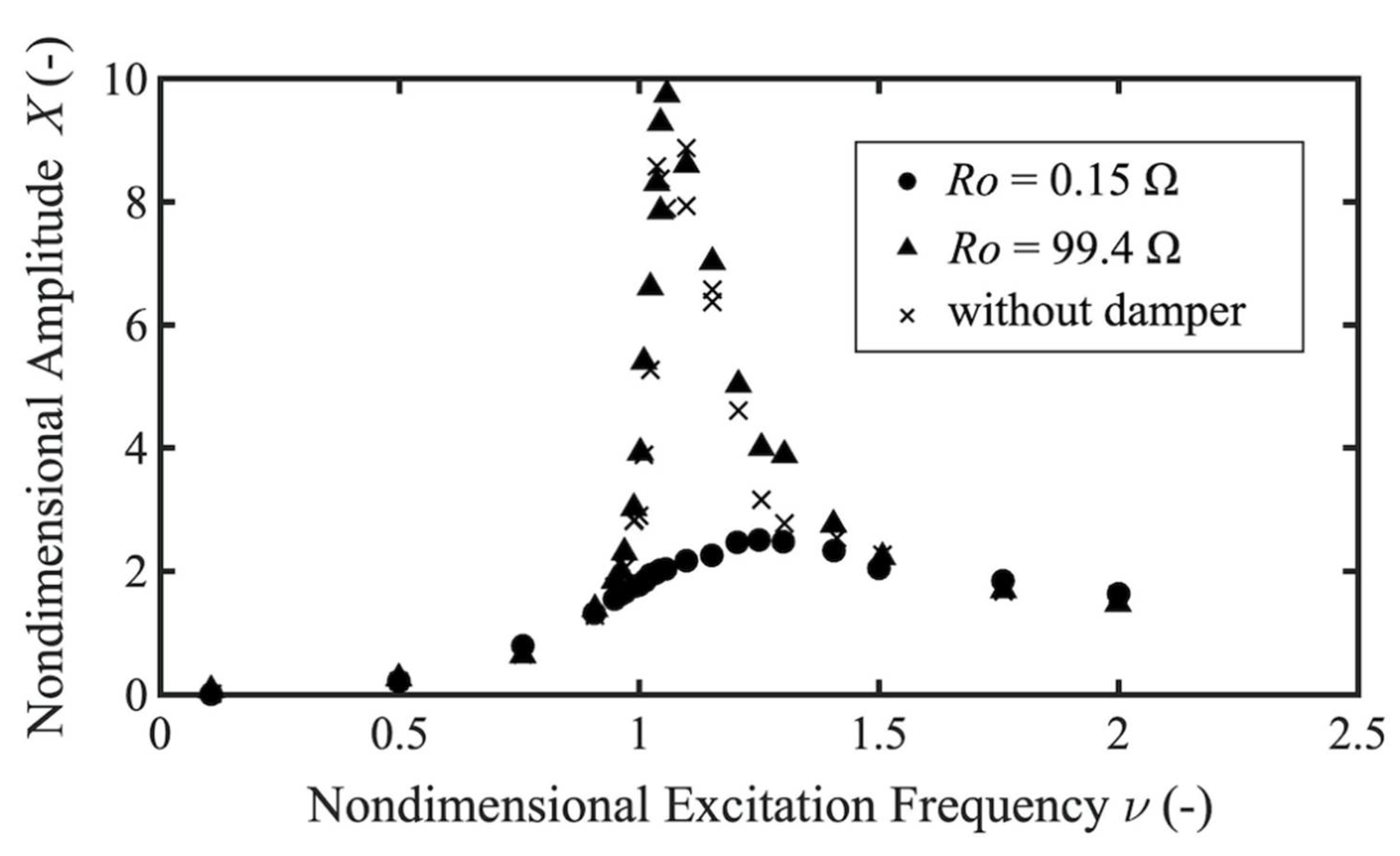
- With the series-type damper, the reduction rate of the resonance amplitude reached 74.3% with an external resistance = 0.15 Ω, while the reduction effect was not obtained with = 99.4 Ω.
- (2)
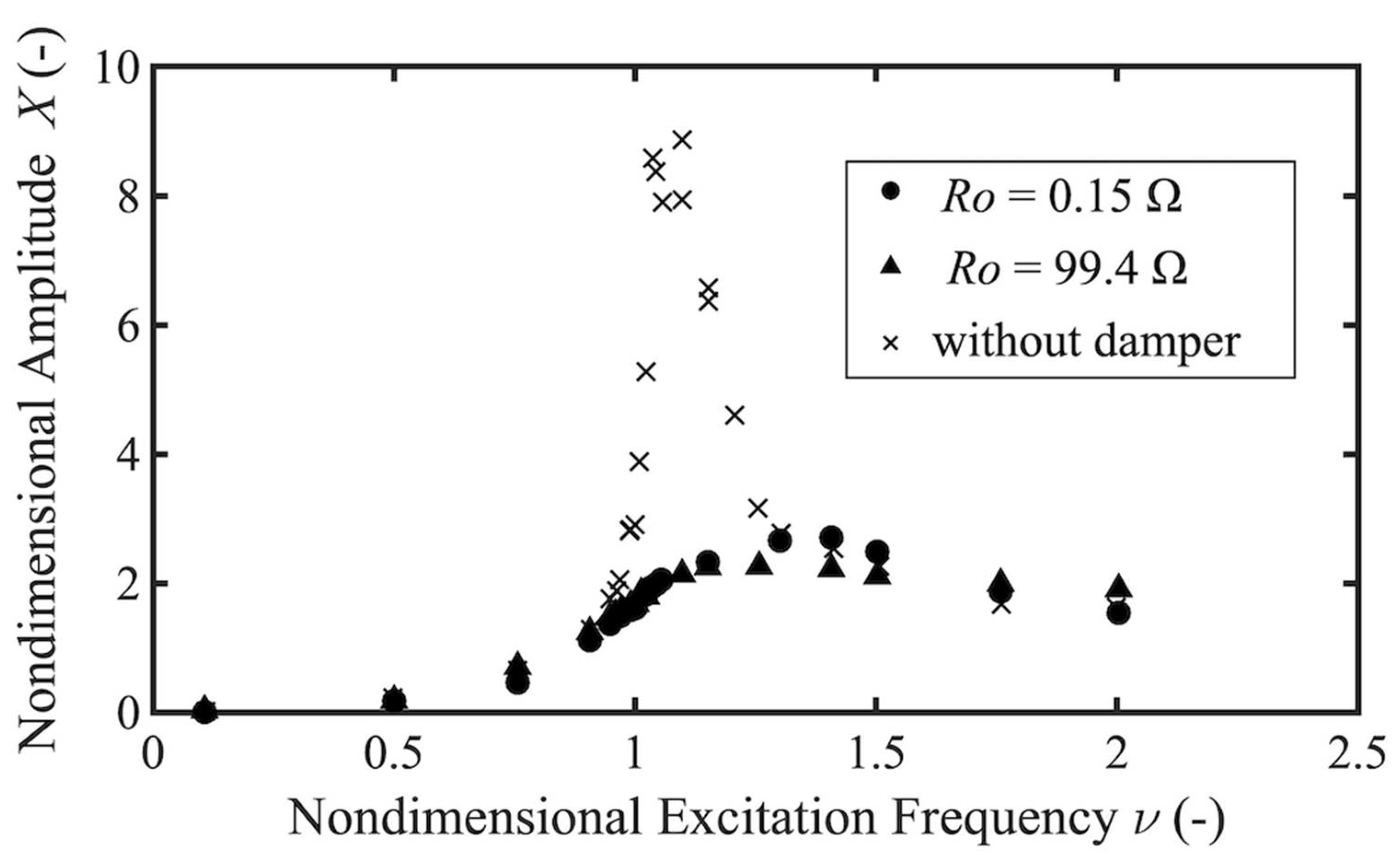
- With the parallel-type damper, the reduction rate of the resonance amplitude reached 69.6% with an external resistance value = 0.15 Ω, and a reduction rate of up to 80% was obtained even with RO = 99.4 Ω. Unlike the series-type damper, the experiments confirmed that the parallel-type damper can maintain the effect of reducing the resonance amplitude even if the external resistance of the circuit is larger.
- (3)
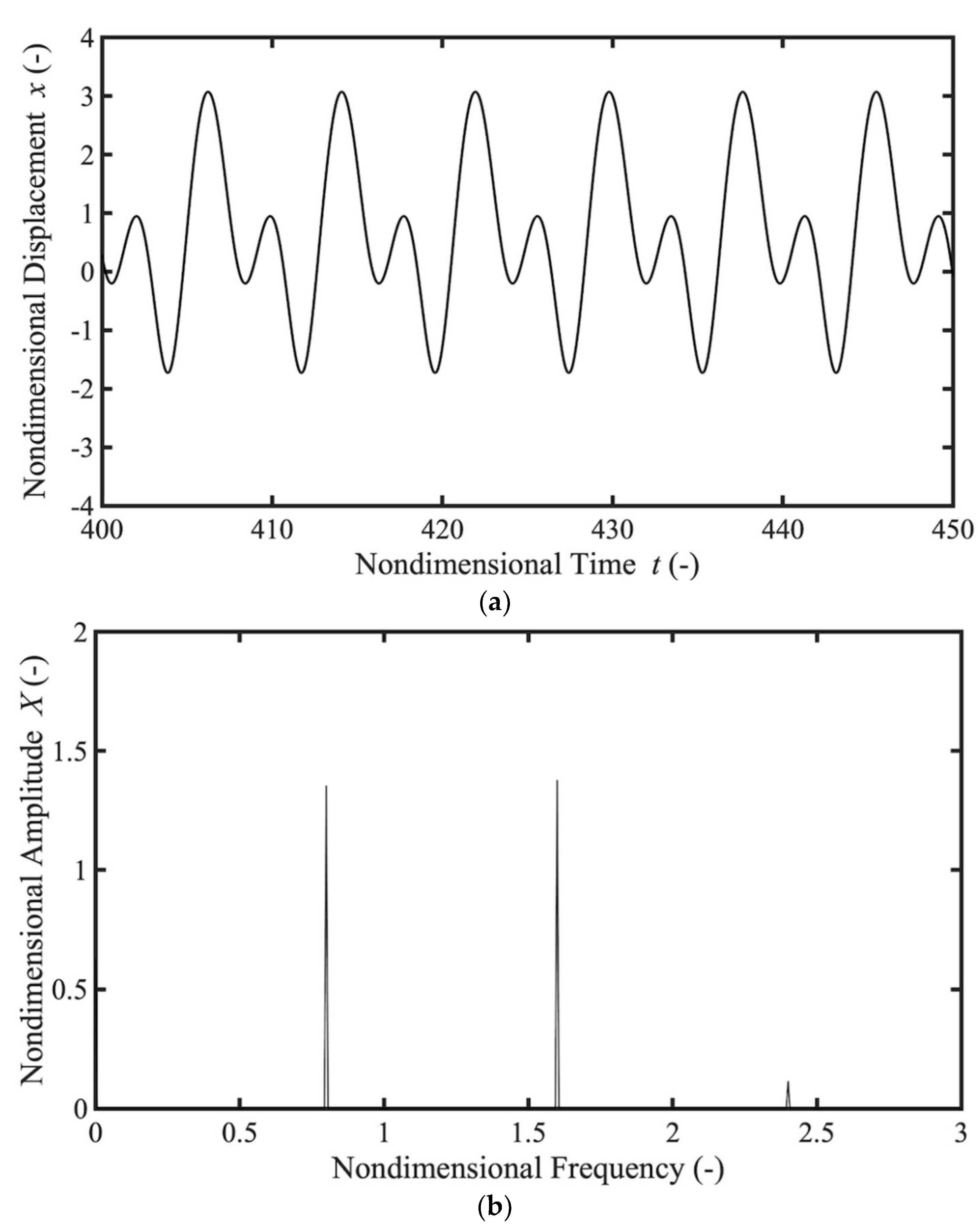
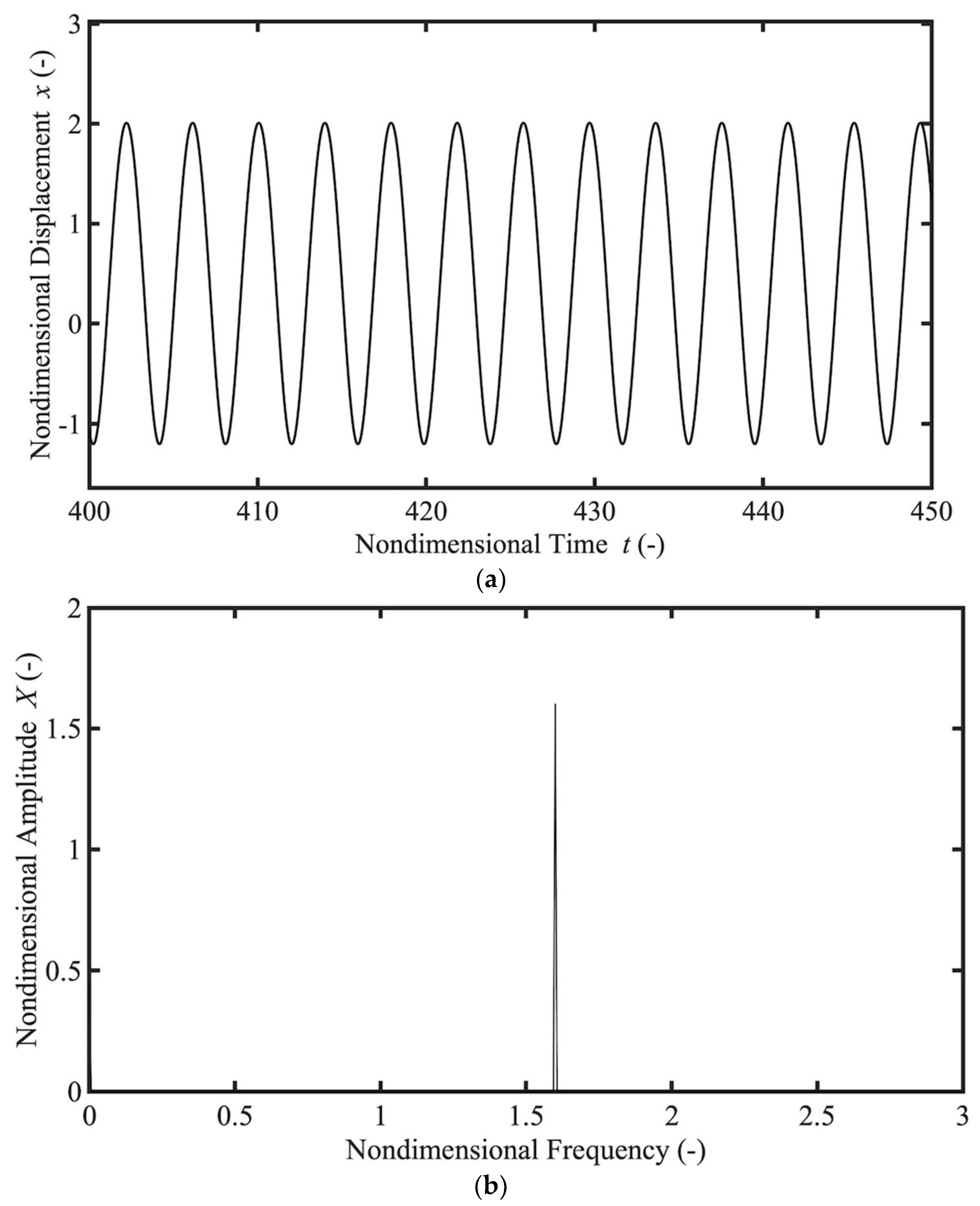
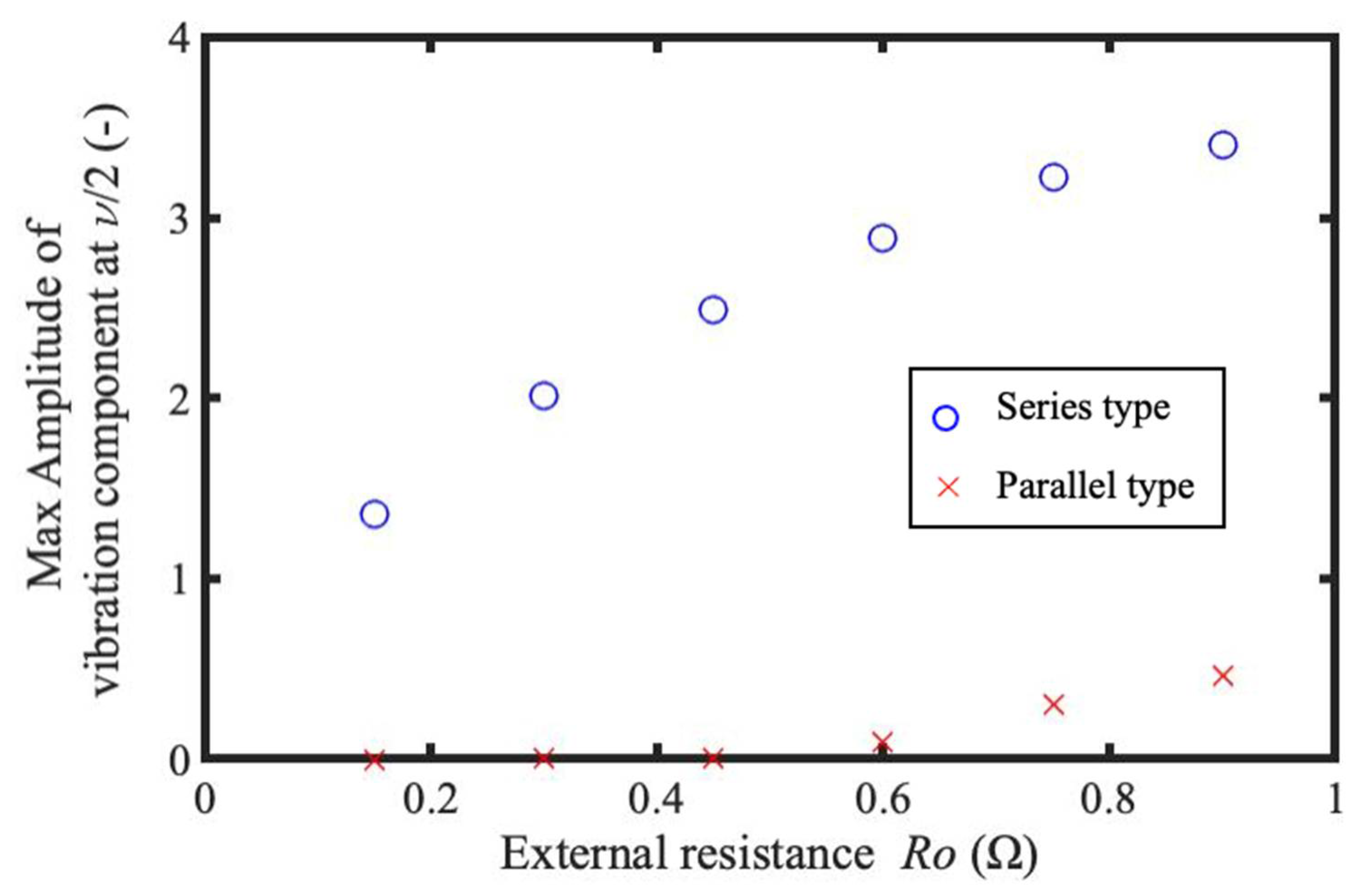
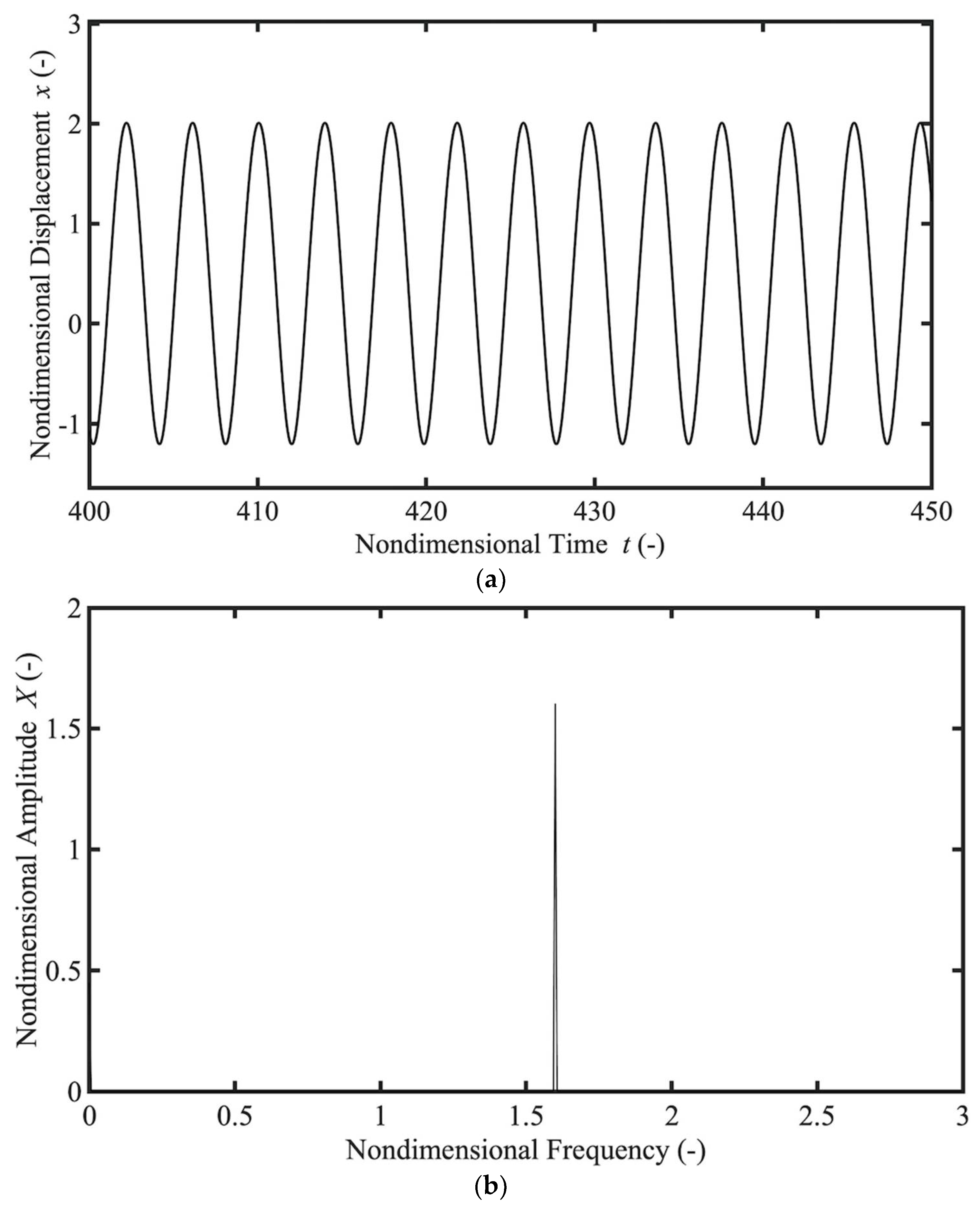
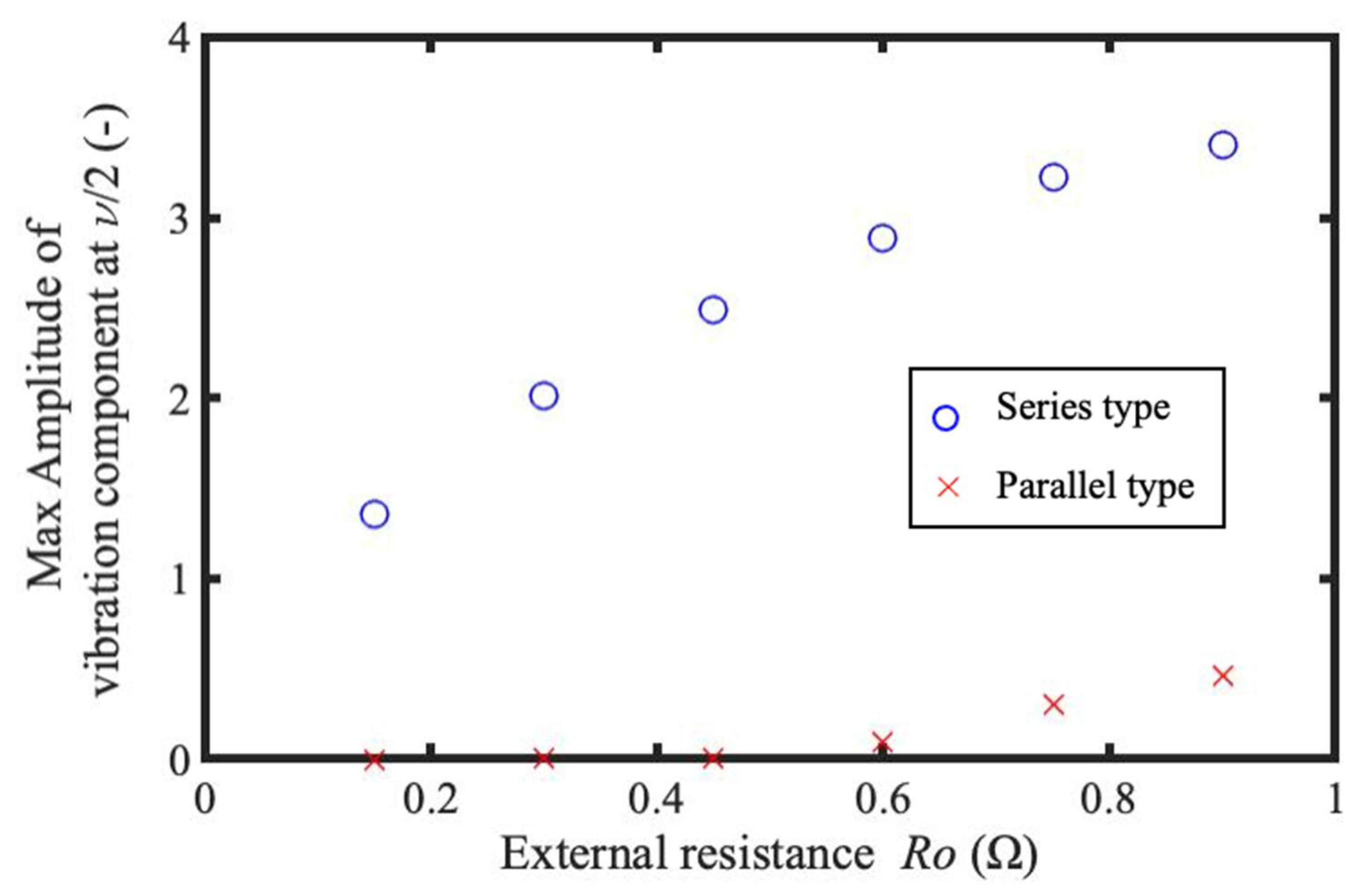
- It was confirmed by numerical calculation that the parallel-type shunt damper can also be expected to reduce amplitude at resonances caused by the nonlinearity of the magnetic force. It was also confirmed by numerical calculations that the damping effect on subharmonic resonance when the external resistance is increased is reduced in the series type but maintained in the parallel type.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Hull, J.R.; Murakami, M. Applications of bulk high-temperature superconductors. Proc. IEEE 2004, 92, 1705–1718. [Google Scholar] [CrossRef] [Green Version]
- Hull, J.R. Superconducting bearings. Supercond. Sci. Technol. 2000, 13, R1–R15. [Google Scholar] [CrossRef] [Green Version]
- Moon, F.C. Superconducting Levitation; Wiley-Interscience Publication: New York, NY, USA, 1994; pp. 1–30, 193–196. [Google Scholar]
- Shibata, T.; Sakai, S. Passive micro vibration isolator utilizing flux pinning effect for satellites. J. Phys. Conf. Ser. 2016, 744, 012009. [Google Scholar] [CrossRef] [Green Version]
- Bornemann, H.J.; Sander, M. Conceptual system design of a 5 MWh/100 MW superconducting flywheel energy storage plant for power utility applications. IEEE Trans. Appl. Supercond. 1997, 7, 398–401. [Google Scholar] [CrossRef]
- Sugiura, T.; Ogawa, S.; Ura, H. Nonlinear oscillation of a rigid body over high-Tc superconductors supported by electro-magnetic forces. Phys. C Supercond. Its Appl. 2005, 426, 783–788. [Google Scholar] [CrossRef]
- Shimizu, T.; Sugiura, T.; Ogawa, S. Parametrically excited motion of a levitated rigid bar over high-Tc superconducting bulks. Phys. C Supercond. Its Appl. 2006, 445, 1109–1114. [Google Scholar] [CrossRef]
- Sasaki, M.; Takabayashi, T.; Sugiura, T. Transition between nonlinear oscillations of an elastic body levitated above high-Tc superconducting bulks. IEEE Trans. Appl. Supercond. 2013, 23, 3600604. [Google Scholar] [CrossRef]
- Nayfeh, A.H.; Mook, D.T. Nonlinear Oscillations; Wiley-Interscience Publication: New York, NY, USA, 1995; pp. 20–28, 195–203. [Google Scholar]
- Deng, Z.; Wang, L.; Li, H.; Li, J.; Wang, H.; Yu, J. Dynamic studies of the HTS maglev transit system. IEEE Trans. Appl. Supercond. 2021, 31, 3600805. [Google Scholar] [CrossRef]
- Li, J.; Li, H.; Zheng, J.; Zheng, B.; Huang, H.; Deng, Z. Nonlinear vibration behaviors of high-Tc superconducting bulks in an applied permanent magnetic array field. J. Appl. Phys. 2017, 121, 243901. [Google Scholar] [CrossRef]
- Li, J.; Deng, Z.; Xia, C.; Gou, Y.; Wang, C.; Zheng, J. Subharmonic resonance in magnetic levitation of the high-temperature superconducting bulks YBa2Cu3O7-X under harmonic excitation. IEEE Trans. Appl. Supercond. 2019, 29, 3600908. [Google Scholar]
- Lin, D.; Zhao, L.; Zhou, D.; Cheng, C.; Zhang, Y.; Zhao, Y. Dynamic characteristics of levitated YBCO bulk running above the permanent magnet guideway with fluctuating magnetic field. IEEE Trans. Appl. Supercond. 2020, 30, 3603808. [Google Scholar] [CrossRef]
- Fujita, K.; Sugiura, T. Simultaneous suppression of translational and tilt vibrations in a superconducting magnetic levitation system by a gyroscopic damper. IEEE Trans. Appl. Supercond. 2022, 32, 3601904. [Google Scholar] [CrossRef]
- Inoue, T.; Ishida, Y.; Sumi, M. Vibration suppression using electromagnetic resonant shunt damper. J. Vib. Acoust. 2008, 130, 041003. [Google Scholar] [CrossRef]
- Uchino, K.; Sugiura, T. Experimental study on oscillation amplitude reduction of a superconducting levitation system by an electromagnetic shunt damper. IEEE Trans. Appl. Supercond. 2019, 29, 3602704. [Google Scholar] [CrossRef]
- Cheng, T.H.; Xuan, D.J.; Li, Z.Z.; Shen, Y.D. Vibration control using shunted electromagnetic transducer. Appl. Mech. Mater. 2010, 26–28, 905–908. [Google Scholar] [CrossRef]
- Fujita, K.; Uchino, K.; Ochiai, K.; Sugiura, T. Numerical analysis of amplitude reduction using electromagnetic shunt damper with an LCR parallel circuit in a superconducting magnetic levitation system. J. AEM Soc. Jpn. 2020, 28, 231–238. (In Japanese) [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| m [kg] | [N·s/m] | [Wb·m] | [mm] |
| 0.0335 | 0.423 | 0.1 | |
| [mm] | [mm] | [H] | |
| 0.500 | |||
| [mF] | [H/m] | [V·s/m] | |
| 1.18 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fujita, K.; Sugiura, T. Characterization of LCR Parallel-Type Electromagnetic Shunt Damper for Superconducting Magnetic Levitation. Actuators 2022, 11, 216. https://doi.org/10.3390/act11080216
Fujita K, Sugiura T. Characterization of LCR Parallel-Type Electromagnetic Shunt Damper for Superconducting Magnetic Levitation. Actuators. 2022; 11(8):216. https://doi.org/10.3390/act11080216
Chicago/Turabian StyleFujita, Kentaro, and Toshihiko Sugiura. 2022. "Characterization of LCR Parallel-Type Electromagnetic Shunt Damper for Superconducting Magnetic Levitation" Actuators 11, no. 8: 216. https://doi.org/10.3390/act11080216
APA StyleFujita, K., & Sugiura, T. (2022). Characterization of LCR Parallel-Type Electromagnetic Shunt Damper for Superconducting Magnetic Levitation. Actuators, 11(8), 216. https://doi.org/10.3390/act11080216