
A Model-Free Output Feedback Control Approach for the Stabilization of Underactuated TORA System with Input Saturation


Abstract
:1. Introduction
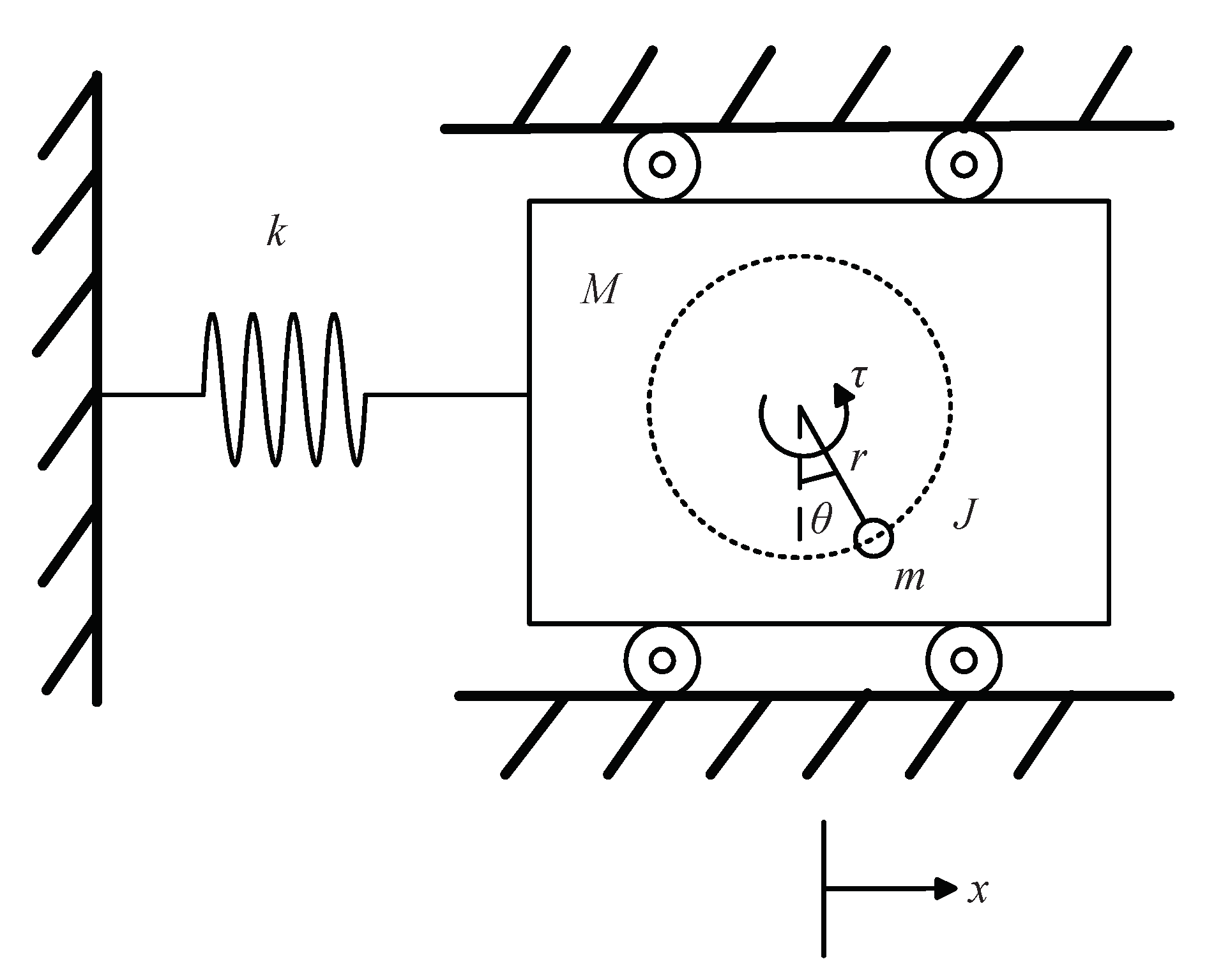
2. Dynamics and Control Problem of the TORA System
3. Model-Free Output Feedback Controller Design
4. Simulation Results
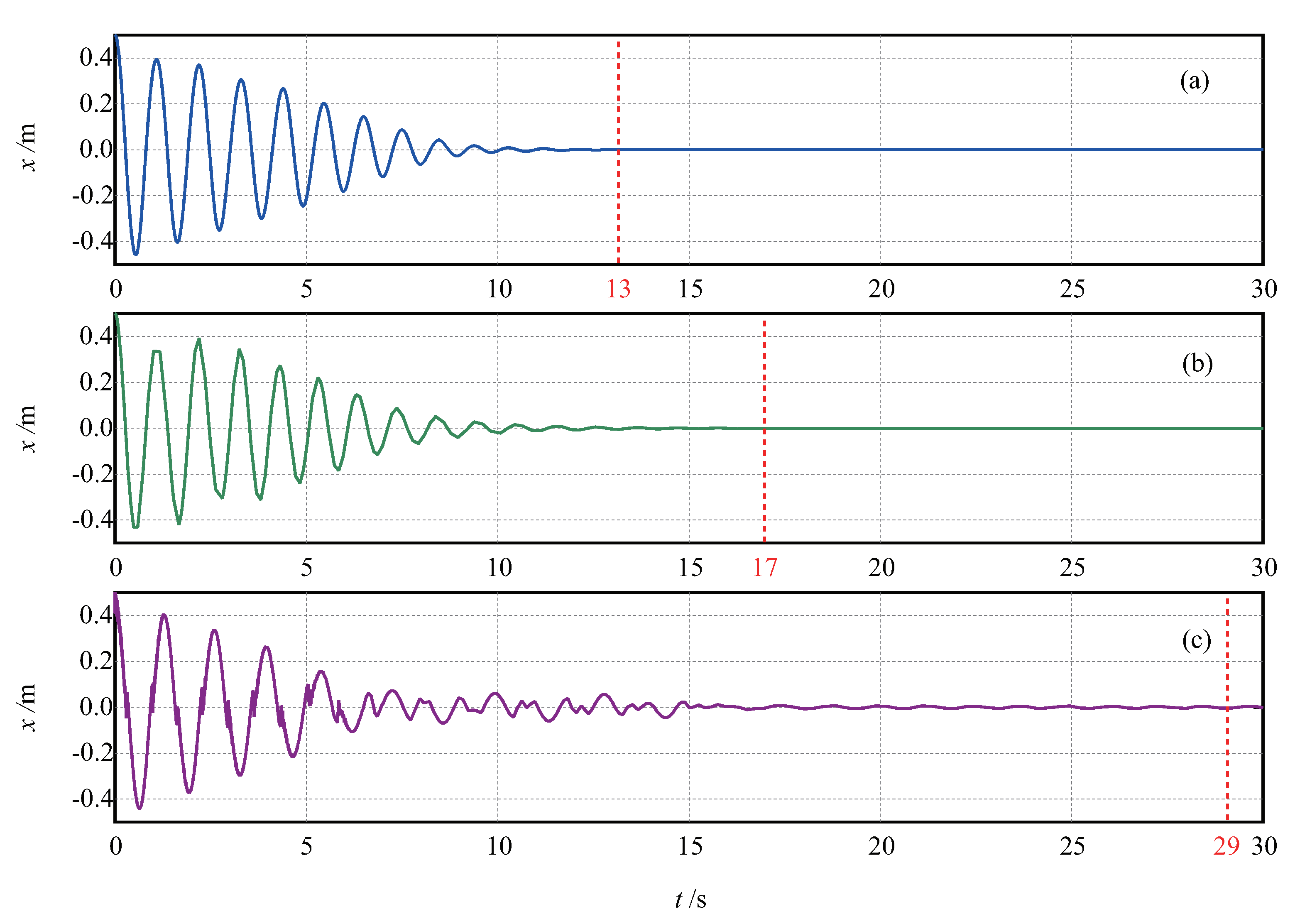
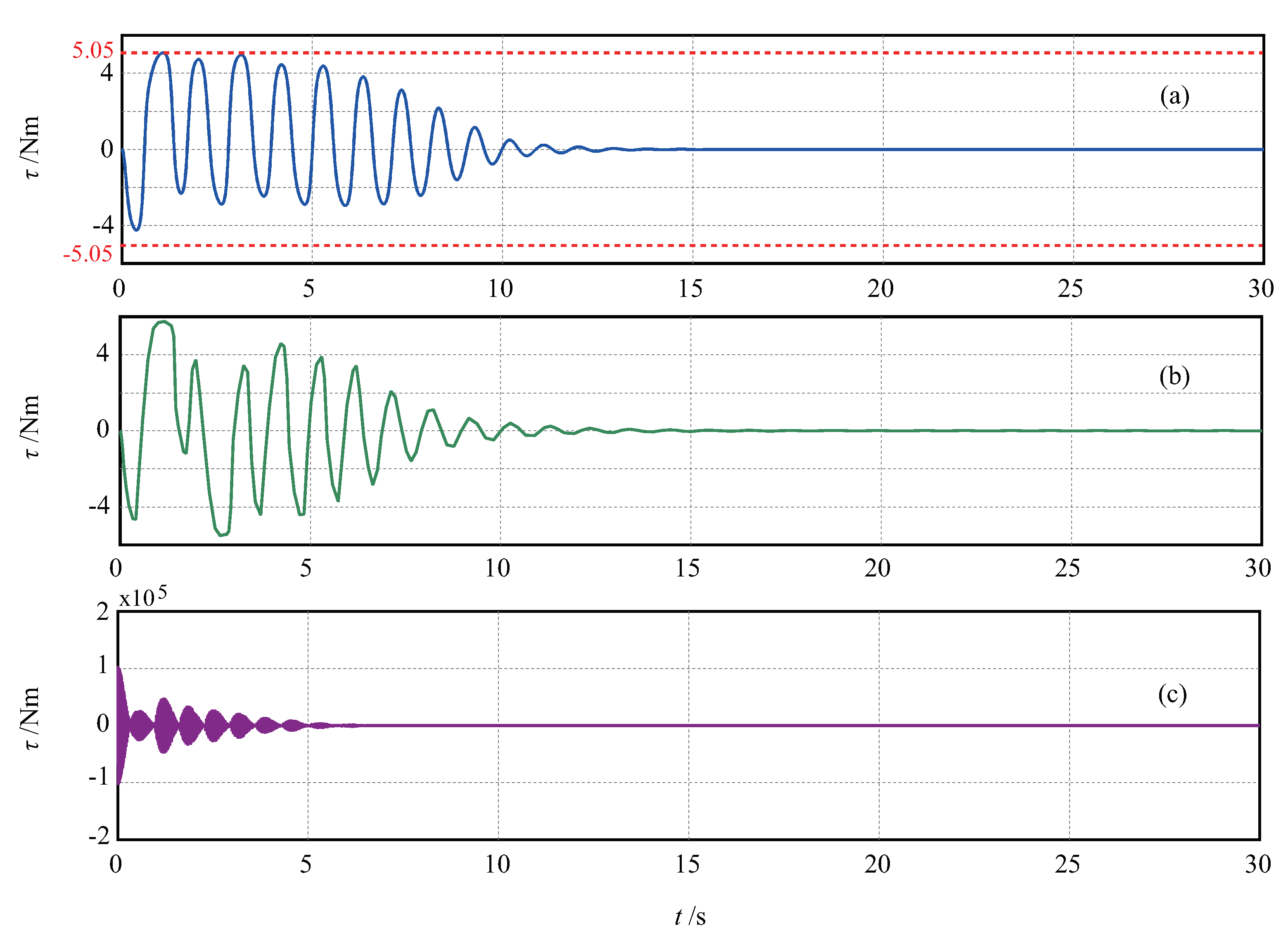
4.1. Comparison Study
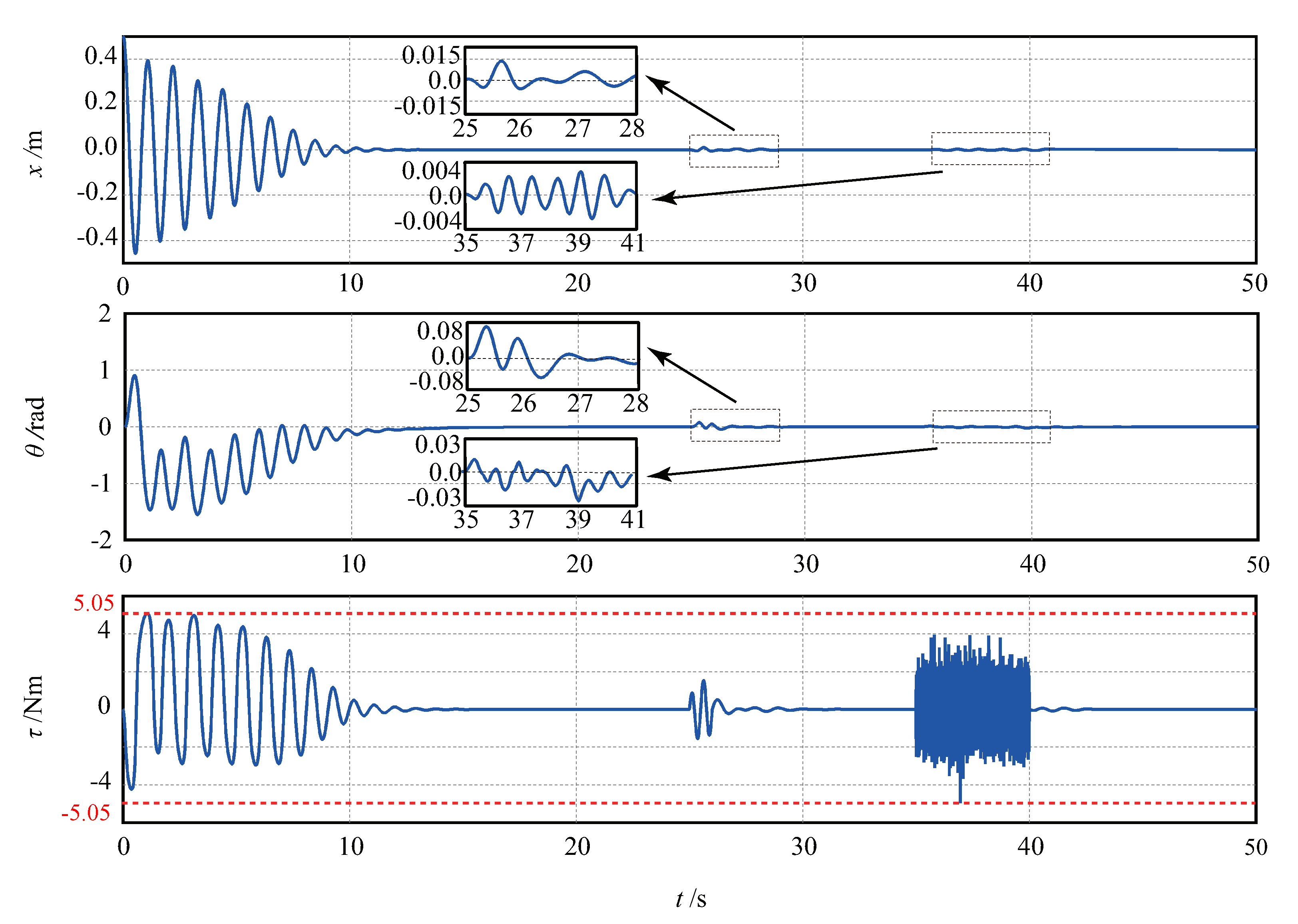
4.2. Robustness Test
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bupp, R.T.; Bernstein, D.S.; Coppola, V.T. A benchmark problem for nonlinear control design. Int. J. Robust Nonlinear Control 1998, 8, 307–310. [Google Scholar] [CrossRef] [Green Version]
- Fradkov, A.; Tomchina, O.; Tomchin, D. Controlled passage through resonance in mechanical systems. J. Sound Vib. 2011, 330, 1065–1073. [Google Scholar] [CrossRef]
- Sun, N.; Wu, Y.; Fang, Y.; Chen, H. Nonlinear Stabilization Control of Multiple-RTAC Systems Subject to Amplitude-Restricted Actuating Torques Using Only Angular Position Feedback. IEEE Trans. Ind. Electron. 2017, 64, 3084–3094. [Google Scholar] [CrossRef]
- Shah, S.A.A.; Gao, B.; Ahmed, N.; Liu, C. Advanced robust control techniques for the stabilization of translational oscillator with rotational actuator based barge-type OFWT. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2021, 235, 327–343. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, L.; Cheng, B.; Zhang, X. An active mass damper using rotating actuator for structural vibration control. Adv. Mech. Eng. 2016, 8, 1–9. [Google Scholar] [CrossRef] [Green Version]
- He, M.E.; Hu, Y.Q.; Zhang, Y. Optimization design of tuned mass damper for vibration suppression of a barge-type offshore floating wind turbine. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2017, 231, 302–315. [Google Scholar] [CrossRef]
- Wu, Y.; Sun, N.; Fang, Y.; Liang, D. An increased nonlinear coupling motion controller for underactuated Multi-TORA systems: Theoretical design and hardware experimentation. IEEE Trans. Syst. Man Cybern. Syst. 2019, 49, 1186–1193. [Google Scholar] [CrossRef]
- Liu, Y.; Yu, H.N. A survey of underactuated mechanical systems. IET Control Theory Appl. 2013, 7, 921–935. [Google Scholar] [CrossRef] [Green Version]
- He, B.; Wang, S.; Liu, Y.J. Underactuated robotics: A review. Int. J. Adv. Robot. Syst. 2019, 16, 1729881419862164. [Google Scholar] [CrossRef] [Green Version]
- Chen, T.; Goodwine, B. Controllability and accessibility results for N-link horizontal planar manipulators with one unactuated joint. Automatica 2021, 125, 109480. [Google Scholar] [CrossRef]
- Wang, L.; Chen, S.; Zhang, P.; She, J.; Lai, X. A Simple Control Strategy Based on Trajectory Planning for Vertical Acrobot. Actuators 2021, 10, 308. [Google Scholar] [CrossRef]
- Chen, S.; Wang, Y.; Zhang, P.; Su, C.Y. Continuous Control Strategy of Planar 3-Linkage Underactuated Manipulator Based on Broad Neural Network. Actuators 2021, 10, 249. [Google Scholar] [CrossRef]
- Yao, X.Y.; Park, J.H.; Ding, H.F.; Ge, M.F. Event-triggered consensus control for networked underactuated robotic systems. IEEE Trans. Cybern. 2020. early access. [Google Scholar] [CrossRef] [PubMed]
- Wang, L.; Lai, X.; Meng, Q.; Wu, M. Effective Control Method Based on Trajectory Optimization for Three-Link Vertical Underactuated Manipulators With Only One Active Joint. IEEE Trans. Cybern. 2021. early access. [Google Scholar] [CrossRef]
- Quan, Q.; Cai, K.Y. Additive-state-decomposition-based tracking control for benchmark. J. Sound Vib. 2013, 332, 4829–4841. [Google Scholar] [CrossRef] [Green Version]
- Wu, X.; Zhao, Y.; Xu, K. Nonlinear disturbance observer based sliding mode control for a benchmark system with uncertain disturbances. ISA Trans. 2021, 110, 63–70. [Google Scholar] [CrossRef] [PubMed]
- Sun, N.; Wu, Y.; Fang, Y.; Chen, H.; Lu, B. Nonlinear Continuous Global Stabilization Control for Underactuated RTAC Systems: Design, Analysis, and Experimentation. IEEE/ASME Trans. Mechatron. 2017, 22, 1104–1115. [Google Scholar] [CrossRef]
- Wu, X.; Xu, K.; Ma, M.; Ke, L. Output feedback control for an underactuated benchmark system with bounded torques. Asian J. Control 2021, 23, 1466–1475. [Google Scholar] [CrossRef]
- Jiang, Z.P.; Kanellakopoulos, I. Global output feedback tracking for a benchmark nonlinear system. IEEE Trans. Autom. Control 2000, 45, 1023–1027. [Google Scholar] [CrossRef]
- Yang, T.; Sun, N.; Fang, Y. Neuroadaptive control for complicated underactuated systems with simultaneous output and velocity constraints exerted on both actuated and unactuated states. IEEE Trans. Neural Netw. Learn. Syst. 2021. early access. [Google Scholar] [CrossRef]
- Yang, T.; Chen, H.; Sun, N.; Fang, Y. Adaptive neural network output feedback control of uncertain underactuated systems with actuated and unactuated state constraints. IEEE Trans. Syst. Man Cybern. Syst. 2021. early access. [Google Scholar] [CrossRef]
- Yang, T.; Chen, H.; Sun, N.; Fang, Y. Adaptive fuzzy control for a class of MIMO underactuated systems with plant uncertainties and actuator deadzones: Design and experiments. IEEE Trans. Cybern. 2021. early access. [Google Scholar] [CrossRef] [PubMed]
- Lee, C.H.; Chang, S.K. Experimental implementation of nonlinear TORA system and adaptive backstepping controller design. Neural Comput. Appl. 2012, 21, 785–800. [Google Scholar] [CrossRef]
- Liu, D.; Guo, W. Nonlinear backstepping design for the underactuated TORA system. J. Vibroengineering 2014, 16, 552–559. [Google Scholar]
- Guo, W.; Liu, D. Nonlinear dynamic surface control for the underactuated translational oscillator with rotating actuator system. IEEE Access 2019, 7, 11844–11853. [Google Scholar] [CrossRef]
- Wu, T.; Gui, W.; Hu, D.; Du, C. Adaptive fuzzy sliding mode control for translational oscillator with rotating actuator: A fuzzy model. IEEE Access 2018, 6, 55861–55869. [Google Scholar] [CrossRef]
- Wu, X.; Xu, K. Global sliding mode control for the underactuated translational oscillator with rotational actuator system. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2021, 235, 540–549. [Google Scholar] [CrossRef]
- Zhang, A.C.; She, J.H.; Qiu, J.D. A new control method for global stabilisation of translational oscillator with rotational actuator. Int. J. Syst. Sci. 2019, 50, 954–960. [Google Scholar] [CrossRef]
- Gao, B.T. Dynamic modeling and energy-based control design for TORA. Acta Autom. Sin. 2008, 34, 1221–1224. [Google Scholar] [CrossRef]
- Wu, X.Q.; Gu, M.M. Adaptive control of the TORA system with partial state constraint. Trans. Inst. Meas. Control 2019, 41, 1172–1177. [Google Scholar] [CrossRef]
- Burg, T.; Dawson, D. Additional notes on the TORA example: A filtering approach to eliminate velocity measurements. IEEE Trans. Control Syst. Technl. 1997, 5, 520–523. [Google Scholar] [CrossRef]
- Escobar, G.; Ortega, R.; Sira-Ramrez, H. Output-feedback global stabilization of a nonlinear benchmark system using a saturated passivity-based controller. IEEE Trans. Control Syst. Technol. 1999, 7, 289–293. [Google Scholar] [CrossRef]
- Gao, B.; Xu, J.; Zhao, J.; Huang, X. Stabilizing control of an underactuated 2-dimensional TORA with only rotor angle measurement. Asian J. Control 2013, 15, 1477–1488. [Google Scholar] [CrossRef]
- Gao, B.; Bao, Y.; Xie, J.; Jia, L. Passivity-based control of two-dimensional translational oscillator with rotational actuator. Trans. Inst. Meas. Control 2014, 36, 111–118. [Google Scholar] [CrossRef]
- Gao, B.; Ye, F. Fuzzy Lyapunov synthesis control of an underactuated 2DTORA system. J. Intell. Fuzzy Syst. 2015, 28, 581–589. [Google Scholar] [CrossRef]
- Xu, K.; Wu, X.; Ma, M.; Zhang, Y. Energy-based output feedback control of the underactuated 2DTORA system with saturated inputs. Trans. Inst. Meas. Control 2020, 42, 2822–2829. [Google Scholar] [CrossRef]
- Zheng, G.B.; Gao, B.T.; Liu, C.D. Fuzzy control design of periodic dynamic trajectory of TORA system. Control Eng. 2019, 26, 1029–1034. [Google Scholar]
- Liu, C.; Gao, B.; Zheng, G.; Sun, G. Fuzzy control design of oscillating trajectory tracking for underactuated TORA. Electr. Mach. Control 2018, 22, 117–122. [Google Scholar]
- Avis, J.M.; Nersesov, S.G.; Nathan, R. A comparison study of nonlinear control techniques for the RTAC system. Nonlinear Anal. Real World Appl. 2010, 11, 2647–2658. [Google Scholar] [CrossRef]
- She, J.; Zhang, A.; Lai, X.; Wu, M. Global stabilization of 2-DOF underactuated mechanical systems-an equivalent-input-disturbance approach. Nonlinear Dyn. 2012, 69, 495–509. [Google Scholar] [CrossRef]
- He, S.; Ji, H.; Yang, K. Semi-global output feedback tracking to reference system with input for a benchmark nonlinear system. Asian J. Control 2019, 21, 749–758. [Google Scholar] [CrossRef]
- Qi, Z.; Li, H.; Wu, C. Adaptive Fuzzy Control of Nonlinear Systems With Unmodeled Dynamics and Input Saturation Using Small-Gain Approach. IEEE Trans. Syst. Man Cybern. Syst. 2017, 47, 1979–1989. [Google Scholar]
- Zheng, Z.; Sun, L. Path following control for marine surface vessel with uncertainties and input saturation. Neurocomputing 2016, 177, 158–167. [Google Scholar] [CrossRef]
- Bupp, R.T.; Bernstein, D.S.; Coppola, V.T. Experimental implementation of integrator backstepping and passive nonlinear controllers on the RTAC tested. Int. J. Robust Nonlinear Control 1998, 8, 435–457. [Google Scholar] [CrossRef]
- Khalil, H.K. Nonlinear Systems, 3rd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 2002. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pan, C.; Cui, C.; Zhou, L.; Xiong, P.; Li, Z. A Model-Free Output Feedback Control Approach for the Stabilization of Underactuated TORA System with Input Saturation. Actuators 2022, 11, 97. https://doi.org/10.3390/act11030097
Pan C, Cui C, Zhou L, Xiong P, Li Z. A Model-Free Output Feedback Control Approach for the Stabilization of Underactuated TORA System with Input Saturation. Actuators. 2022; 11(3):97. https://doi.org/10.3390/act11030097
Chicago/Turabian StylePan, Changzhong, Chenchen Cui, Lan Zhou, Peiyin Xiong, and Zhijing Li. 2022. "A Model-Free Output Feedback Control Approach for the Stabilization of Underactuated TORA System with Input Saturation" Actuators 11, no. 3: 97. https://doi.org/10.3390/act11030097
APA StylePan, C., Cui, C., Zhou, L., Xiong, P., & Li, Z. (2022). A Model-Free Output Feedback Control Approach for the Stabilization of Underactuated TORA System with Input Saturation. Actuators, 11(3), 97. https://doi.org/10.3390/act11030097