
Cooperation-Based Risk Assessment Prediction for Rear-End Collision Avoidance in Autonomous Lane Change Maneuvers



Abstract
:1. Introduction
2. Risk Assessment for Autonomous LXS
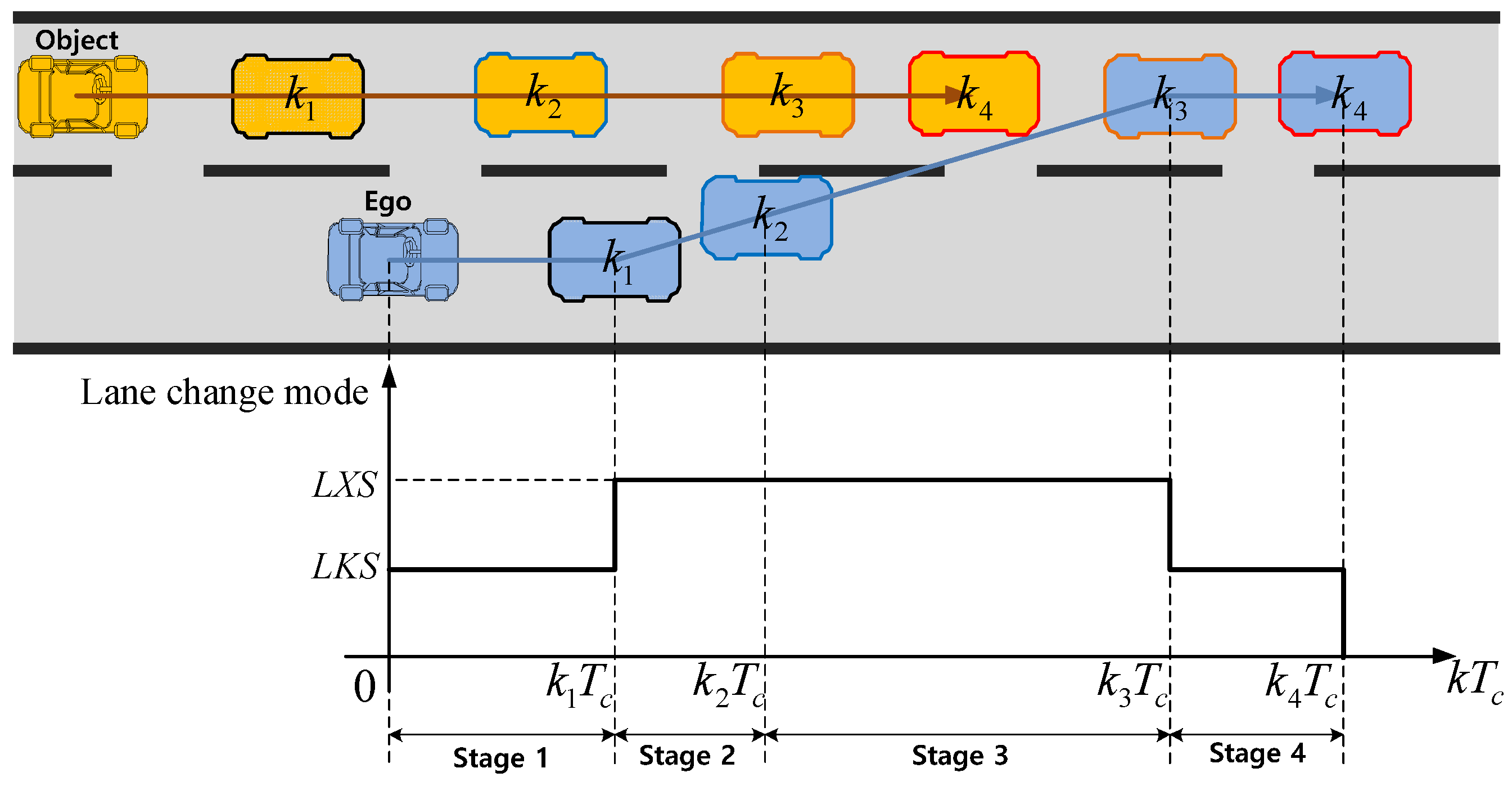
2.1. Risk Assessment Strategy for Autonomous LXS
2.2. Coordinates of Vehicle for Risk Assessment
3. Kalman Filter Design
4. Risk Assessment Using Cooperation Concept
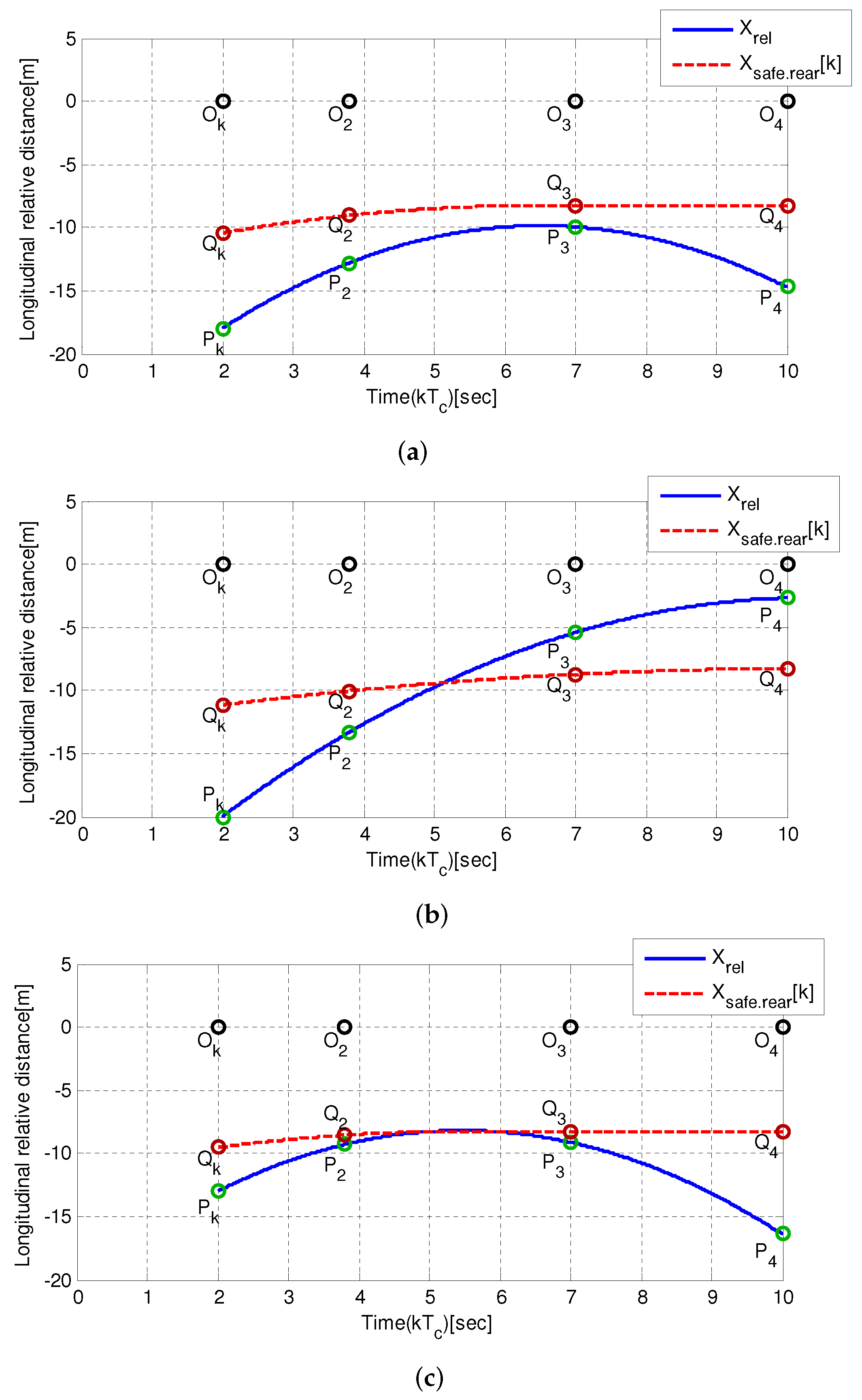
4.1. Index for Risk Assessment
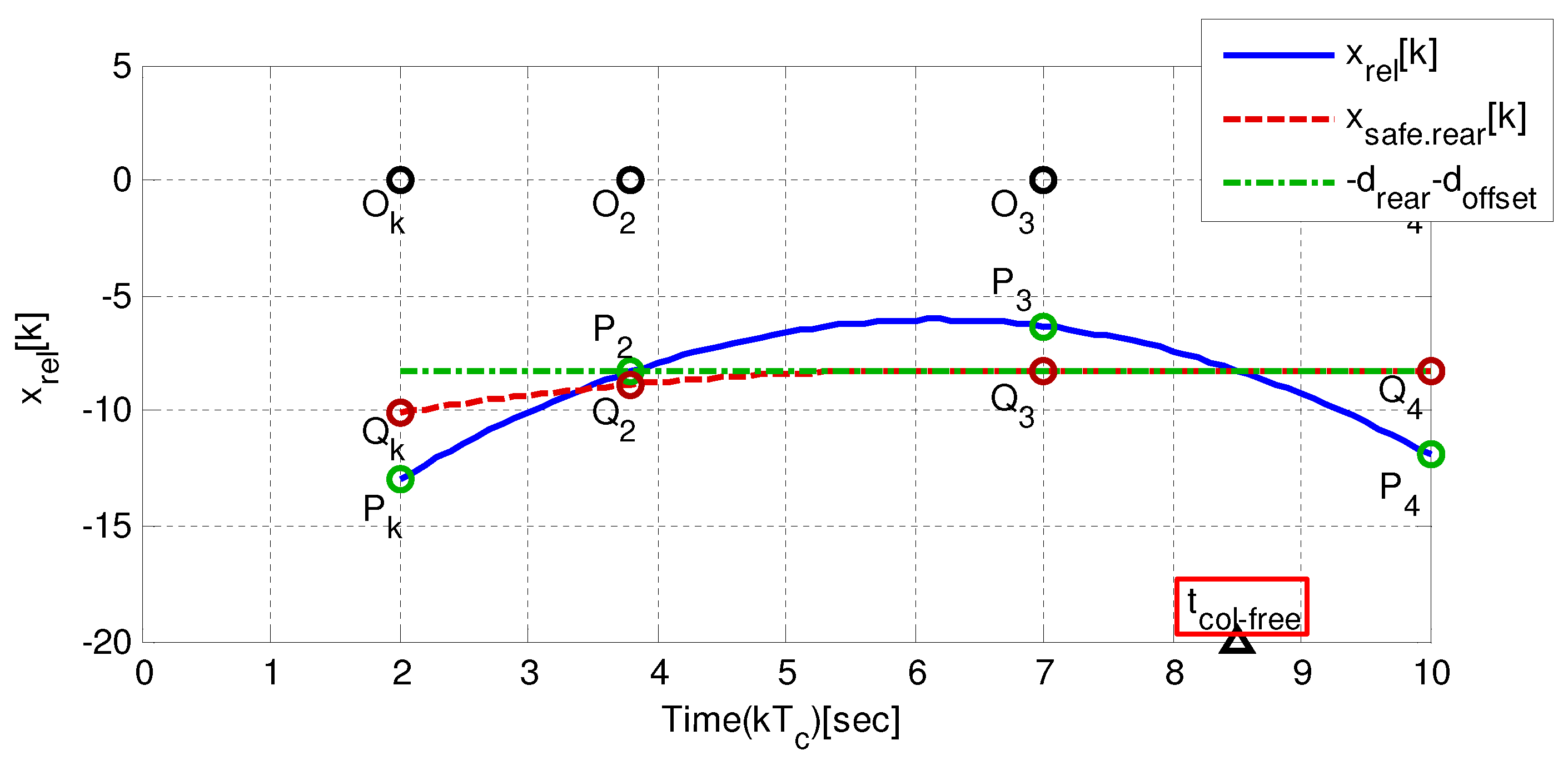
4.2. Conditions for Collision-Free
4.3. Risk Assessment Using the Cooperation Concept
5. Simulation Results
5.1. Estimation Performance of Kalman Filter
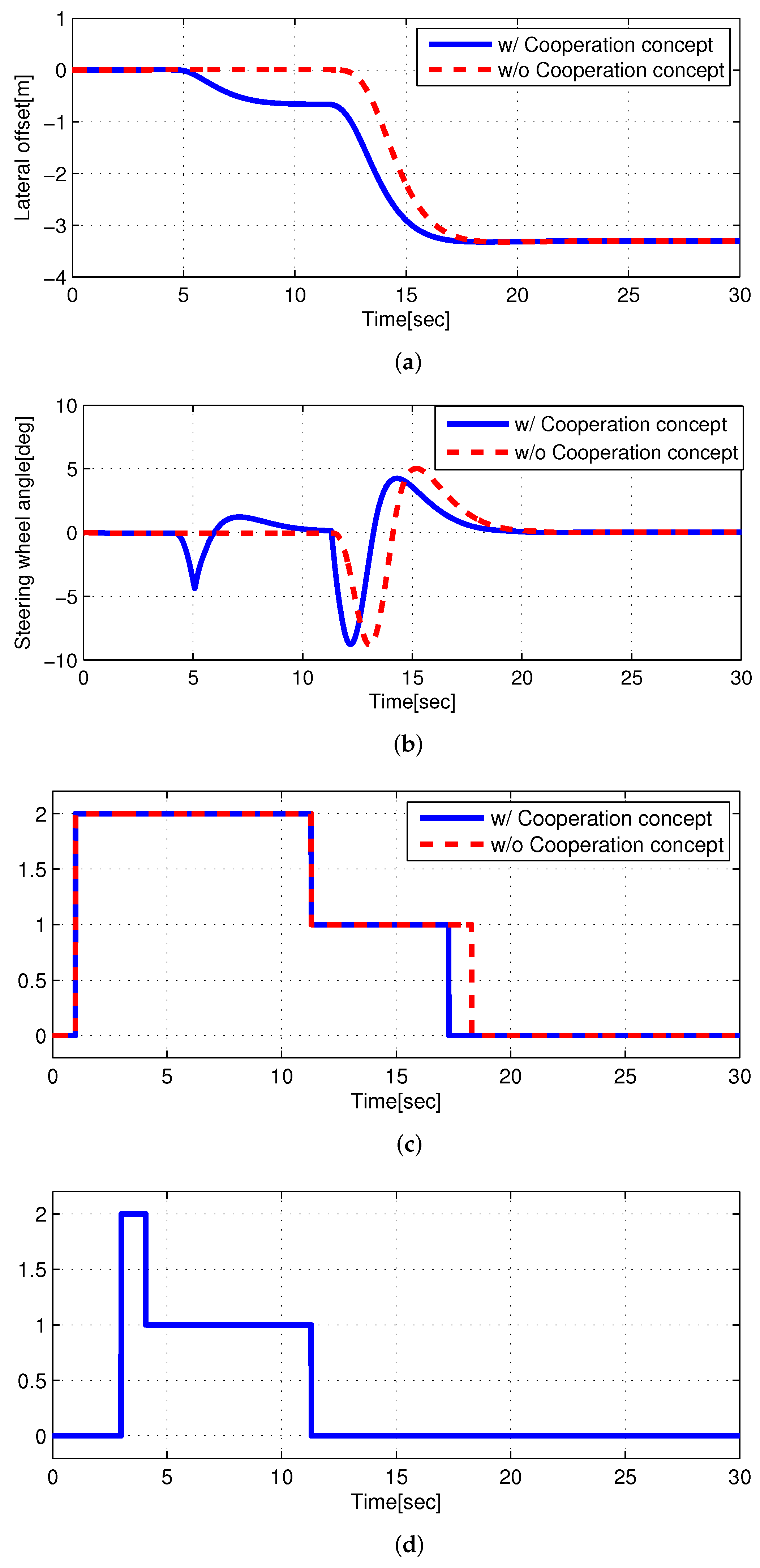
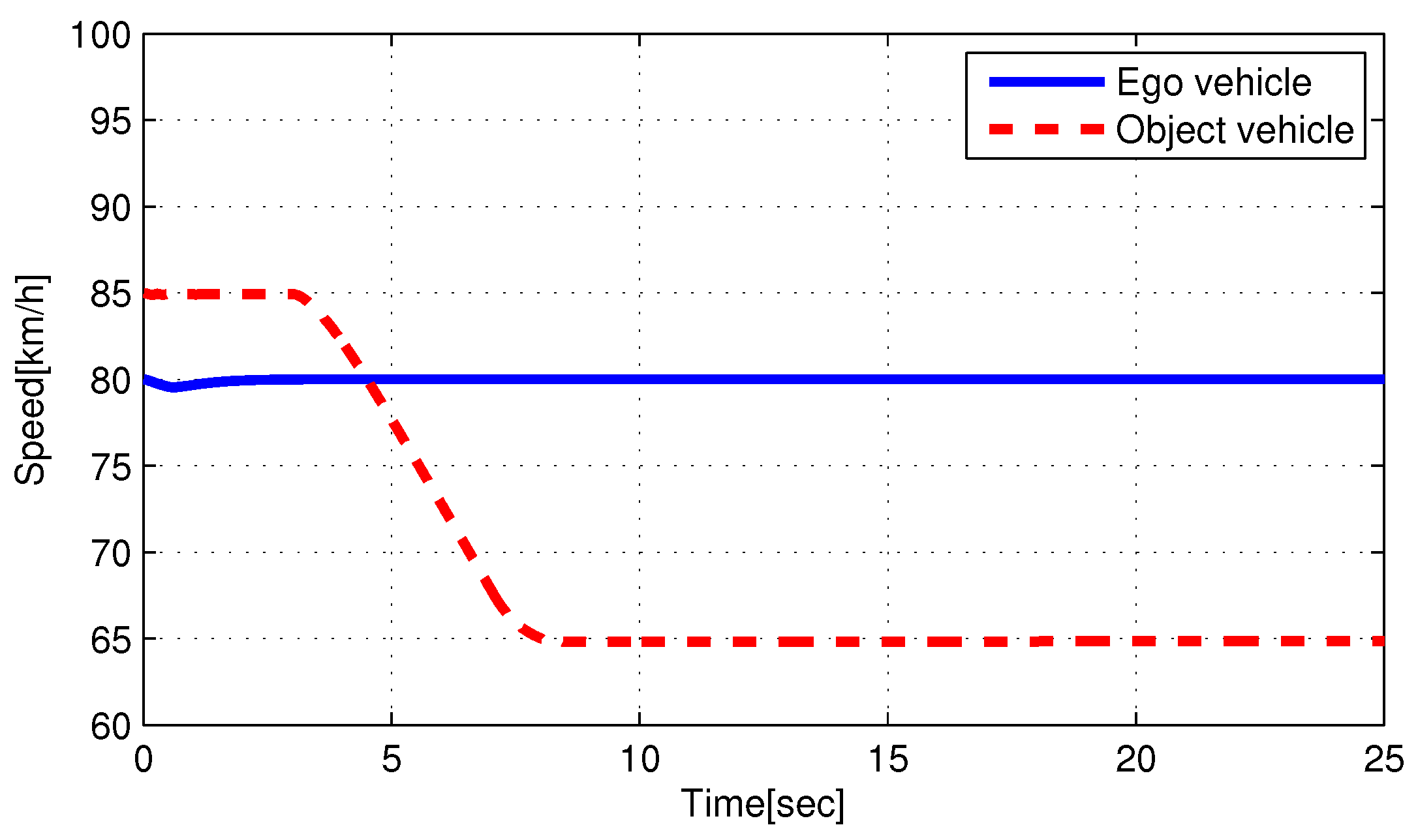
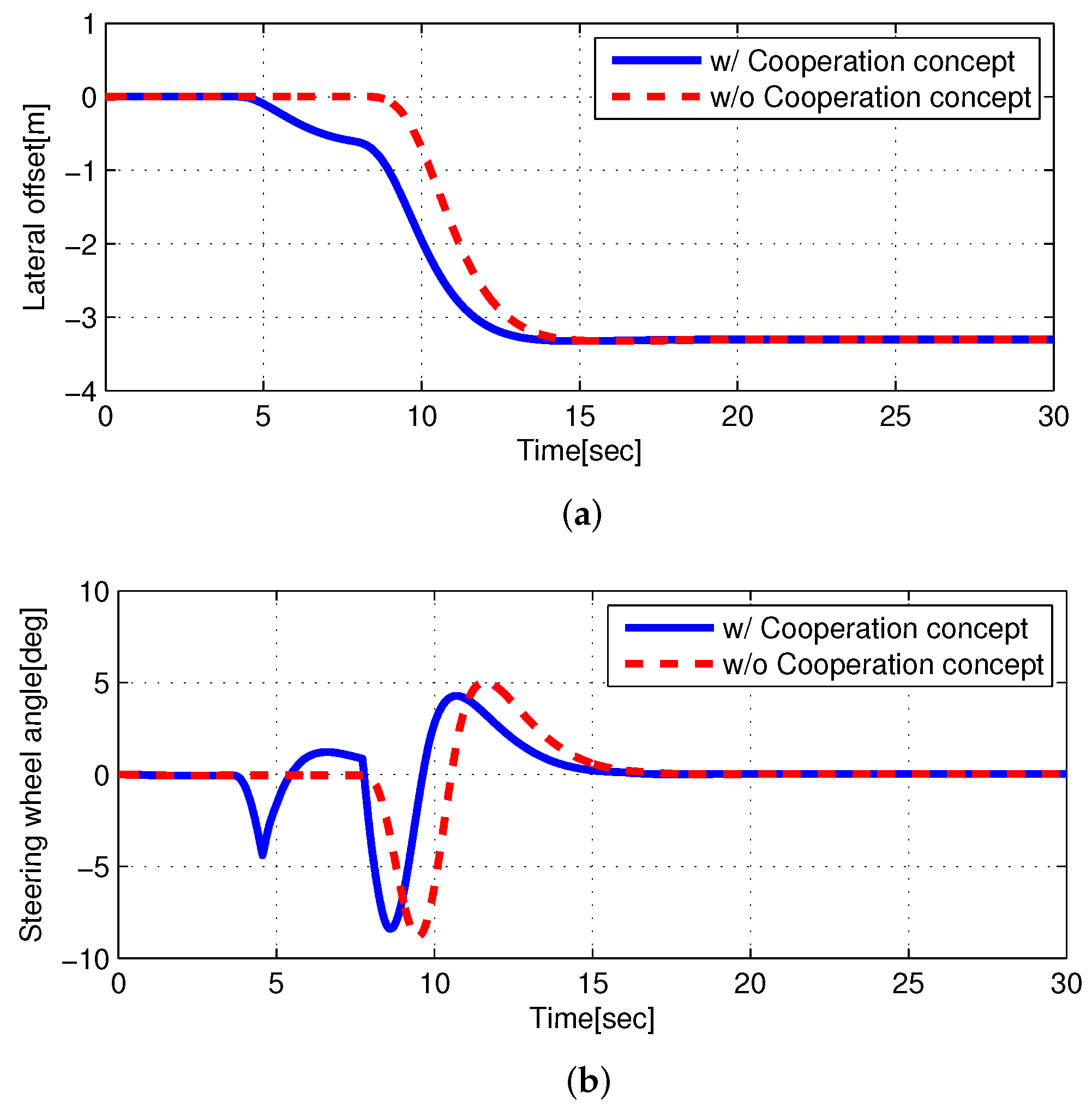
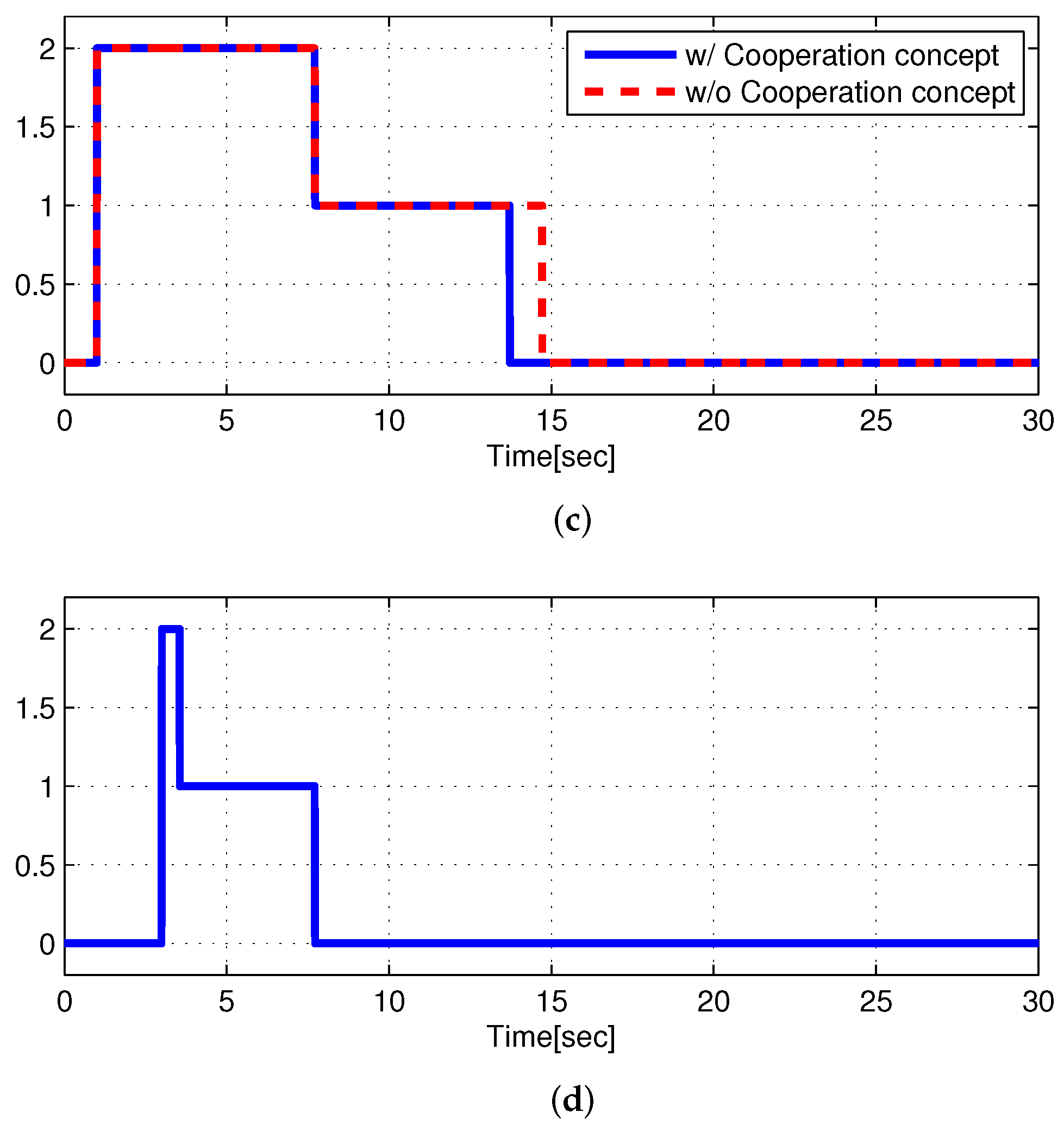
5.2. Simulation for the Risk Assessment
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Dahl, J.; de Campos, G.R.; Olsson, C.; Fredriksson, J. Collision avoidance: A literature review on threat-assessment techniques. IEEE Trans. Intell. Veh. 2018, 4, 101–113. [Google Scholar] [CrossRef]
- Hamid, U.Z.A.; Saito, Y.; Zamzuri, H.; Rahman, M.A.A.; Raksincharoensak, P. A review on threat assessment, path planning and path tracking strategies for collision avoidance systems of autonomous vehicles. Int. J. Veh. Auton. Syst. 2013, 14, 134–169. [Google Scholar] [CrossRef]
- Jula, H.; Kosmatopoulos, E.B.; Ioannou, P.A. Collision avoidance analysis for lane changing and merging. IEEE Trans. Veh. Technol. 2000, 46, 2295–2308. [Google Scholar] [CrossRef] [Green Version]
- Hillenbrand, J.; Spieker, A.M.; Kroschel, K. A multilevel collision mitigation approach its situation assessment, decision making, and performance tradeoffs. IEEE Trans. Intell. Transp. Syst. 2006, 7, 528–540. [Google Scholar] [CrossRef]
- Laugier, C.; Paromtchik, I.E.; Perrollaz, M.; Yong, M.; Yoder, J.-D.; Tay, C.; Mekhnacha, K.; Nègre, A. Probabilistic analysis of dynamic scenes and collision risks assessment to improve driving safety. IEEE Intell. Transp. Syst. Mag. 2006, 3, 4–19. [Google Scholar] [CrossRef] [Green Version]
- Madås, D.; Nosratinia, M.; Keshavarz, M.; Sundström, P.; Philippsen, R.; Eidehall, A.; Dahlén, K.M. On path planning methods for automotive collision avoidance. In Proceedings of the 2013 IEEE Intelligent Vehicles Symposium (IV), Gold Coast, QLD, Australia, 23–26 June 2013; pp. 931–937. [Google Scholar]
- Houénou, A.; Bonnifait, P.; Cherfaoui, V. Risk assessment for collision avoidance systems. In Proceedings of the 17th International IEEE Conference on Intelligent Transportation Systems (ITSC), Qingdao, China, 8–11 October 2014; pp. 386–391. [Google Scholar]
- Kim, B.J.; Son, Y.S.; Yi, K. Probabilistic threat assessment with environment description and rule-based multi-traffic prediction for integrated risk management system. In Proceedings of the 2015 IEEE Intelligent Vehicles Symposium (IV), Seoul, Korea, 28 June–1 July 2015; pp. 642–647. [Google Scholar]
- Katrakazas, C.; Quddus, M.; Chen, W.H. A new integrated collision risk assessment methodology for autonomous vehicles. Accid. Anal. Prev. 2019, 127, 61–79. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, G.; Yang, Y.; Zhang, T.; Qu, X.; Cao, D.; Cheng, B.; Li, K. Risk assessment based collision avoidance decision-making for autonomous vehicles in multi-scenarios. Transp. Res. Part C Emerg. Technol. 2021, 122, 102820. [Google Scholar] [CrossRef]
- National Highway Traffic Safety Administration. Traffic Safety Facts 2005; Department of Transportation: Washington, DC, USA, 2006. [Google Scholar]
- Fang, C.-Y.; Chen, S.-W.; Fuh, C.-S. Automatic change detection of driving environments in a vision-based driver assistance system. IEEE Trans. Neural Netw. 2003, 14, 646–657. [Google Scholar] [CrossRef] [PubMed]
- Schubert, R.; Schulze, K.; Wanielik, G. Situation assessment for automatic lane-change maneuvers. IEEE Trans. Intell. Transp. Syst. 2010, 11, 607–616. [Google Scholar] [CrossRef]
- Whitsitt, S.; Sprinkle, J. A hybrid controller for autonomous vehicle lane changing with epsilon dragging. In Proceedings of the 2014 American Control Conference, Portland, OR, USA, 4–6 June 2014; pp. 5307–5312. [Google Scholar]
- Hwang, Y.; Kang, C.M.; Kim, W. Robust nonlinear control using barrier Lyapunov function under lateral offset error constraint for lateral control of autonomous vehicles. IEEE Trans. Intell. Transp. Syst. 2022, 23, 1565–1571. [Google Scholar] [CrossRef]
- Chen, C.; Liu, X.; Chen, H.H.; Li, M.; Zhao, L. A rear-end collision risk evaluation and control scheme using a Bayesian network model. IEEE Trans. Intell. Transp. Syst. 2018, 20, 264–284. [Google Scholar] [CrossRef]
- Franklin, G.F.; Powell, J.D.; Workman, M.L. Digital Control of Dynamic Systems; Addison-Wesley: Boston, MA, USA, 1998. [Google Scholar]
- Bokare, P.S.; Maurya, A.K. Acceleration-deceleration behaviour of various vehicle types. Transp. Res. Procedia 2017, 25, 4733–4749. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Stage | Description |
|---|---|
| Stage 1 | -Turn on signal |
| -Prepare for lane change | |
| -Monitor the behavior of object vehicles | |
| -Maintain LKS until | |
| Stage 2 | -Move toward the target lane up to |
| if there is no collision risk | |
| -Monitor CD/NCD if there is collision risk | |
| * and D denote the width of the lane and vehicle | |
| Stage 3 | -Move into the target lane until the CG of the ego |
| vehicle reaches the centerline of the target lane if | |
| there is no collision risk | |
| -Return to the original lane if there is collision risk | |
| Stage 4 | -LKS of the target lane until |
| -Exit LXS after |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Son, Y.S.; Kim, W. Cooperation-Based Risk Assessment Prediction for Rear-End Collision Avoidance in Autonomous Lane Change Maneuvers. Actuators 2022, 11, 98. https://doi.org/10.3390/act11040098
Son YS, Kim W. Cooperation-Based Risk Assessment Prediction for Rear-End Collision Avoidance in Autonomous Lane Change Maneuvers. Actuators. 2022; 11(4):98. https://doi.org/10.3390/act11040098
Chicago/Turabian StyleSon, Young Seop, and Wonhee Kim. 2022. "Cooperation-Based Risk Assessment Prediction for Rear-End Collision Avoidance in Autonomous Lane Change Maneuvers" Actuators 11, no. 4: 98. https://doi.org/10.3390/act11040098
APA StyleSon, Y. S., & Kim, W. (2022). Cooperation-Based Risk Assessment Prediction for Rear-End Collision Avoidance in Autonomous Lane Change Maneuvers. Actuators, 11(4), 98. https://doi.org/10.3390/act11040098