
Control Design for CABLEankle, a Cable Driven Manipulator for Ankle Motion Assistance




Abstract
:1. Introduction
2. Requirements and Problems
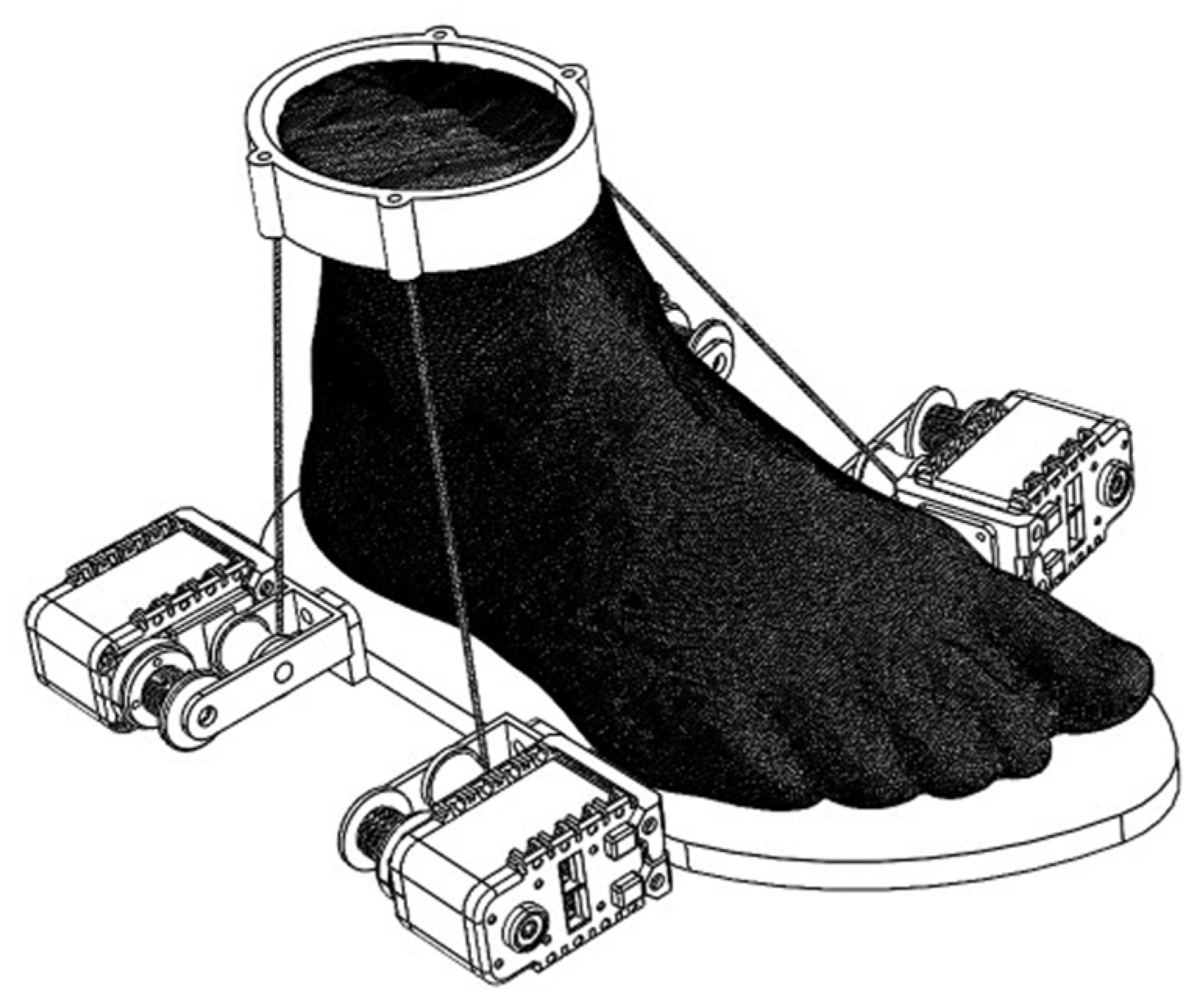
3. CABLEankle, an Ankle Assisting Device
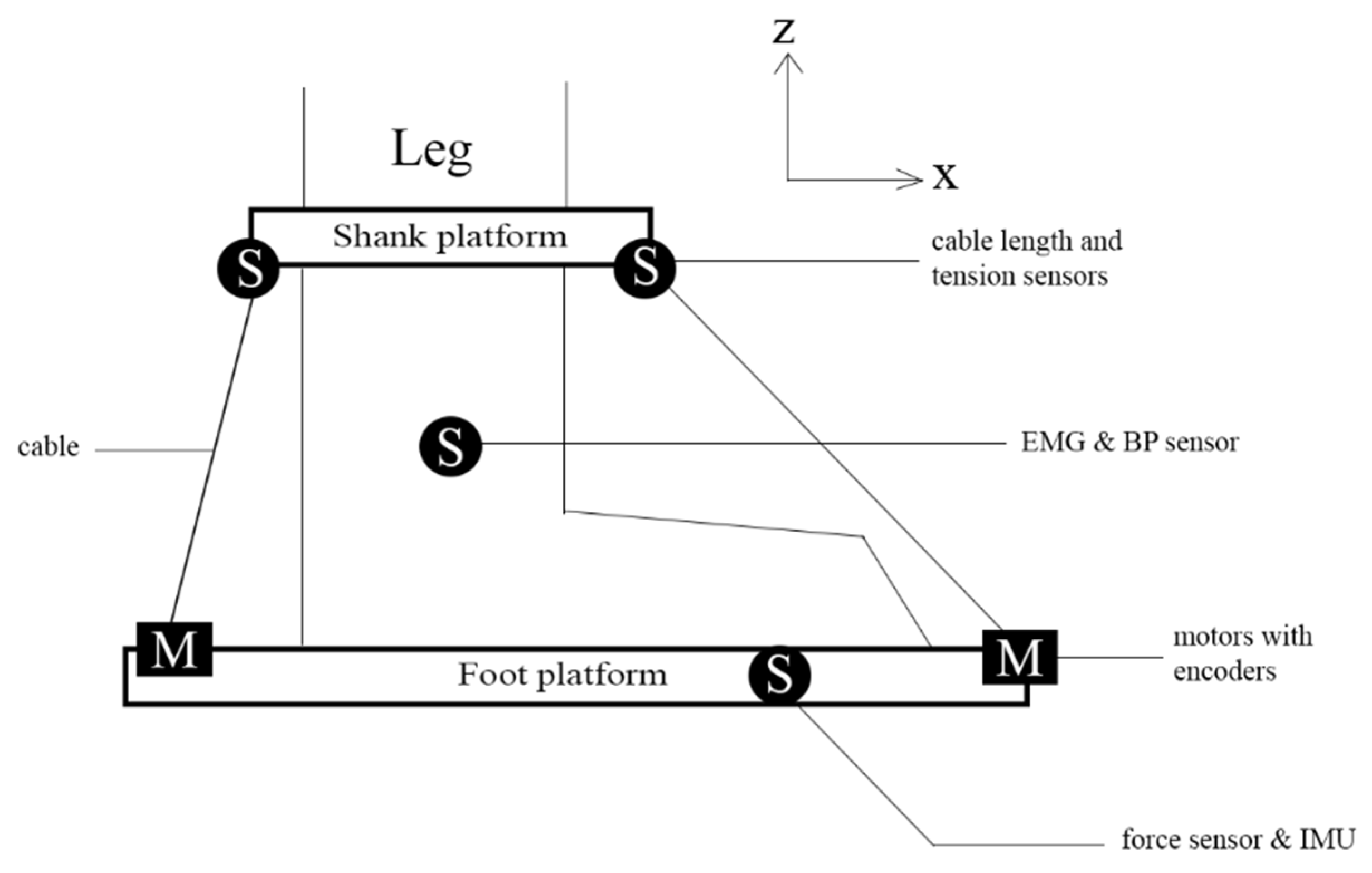
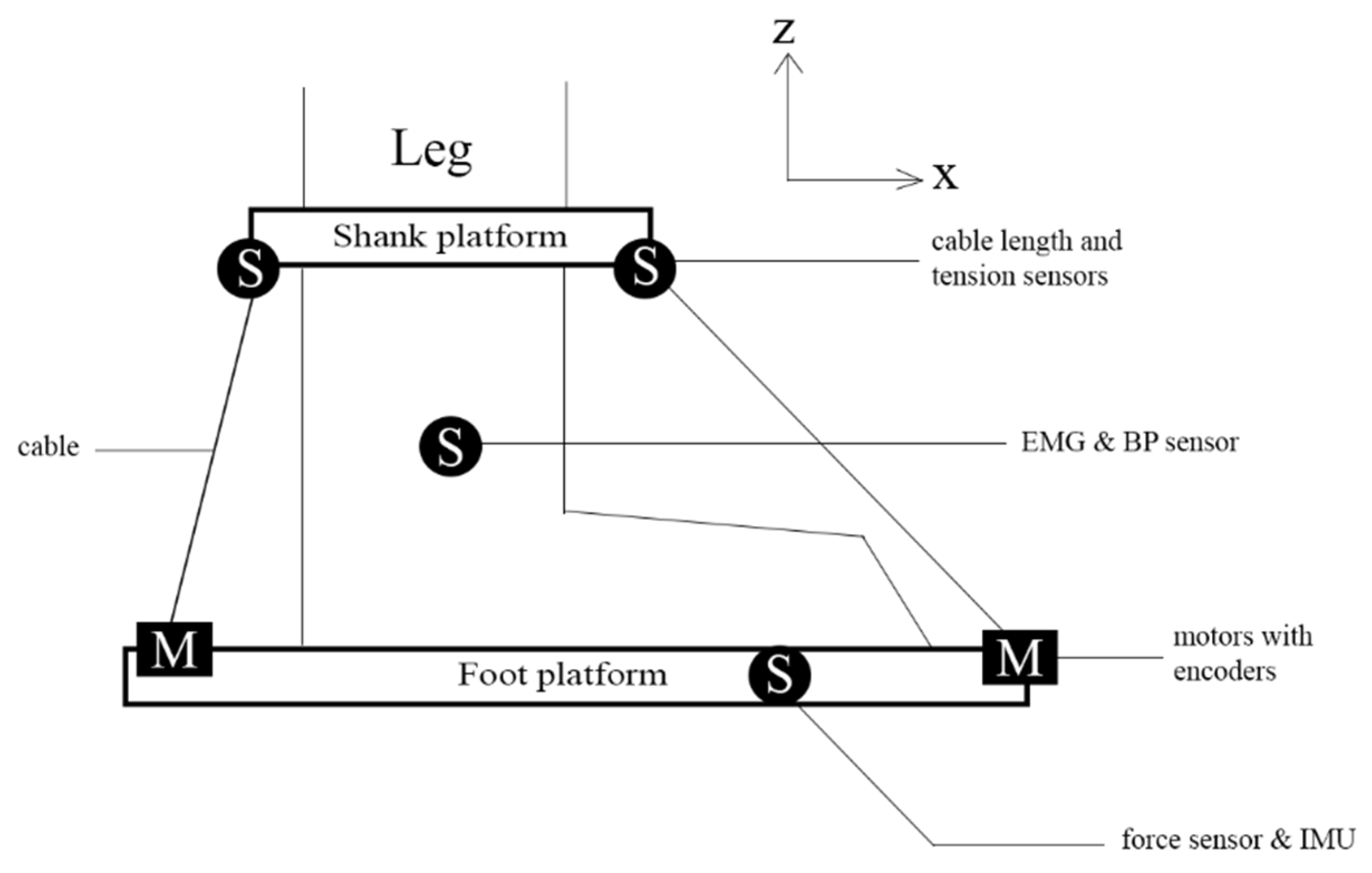
3.1. Mechanism Design of a Cable-Driven Assistive Device
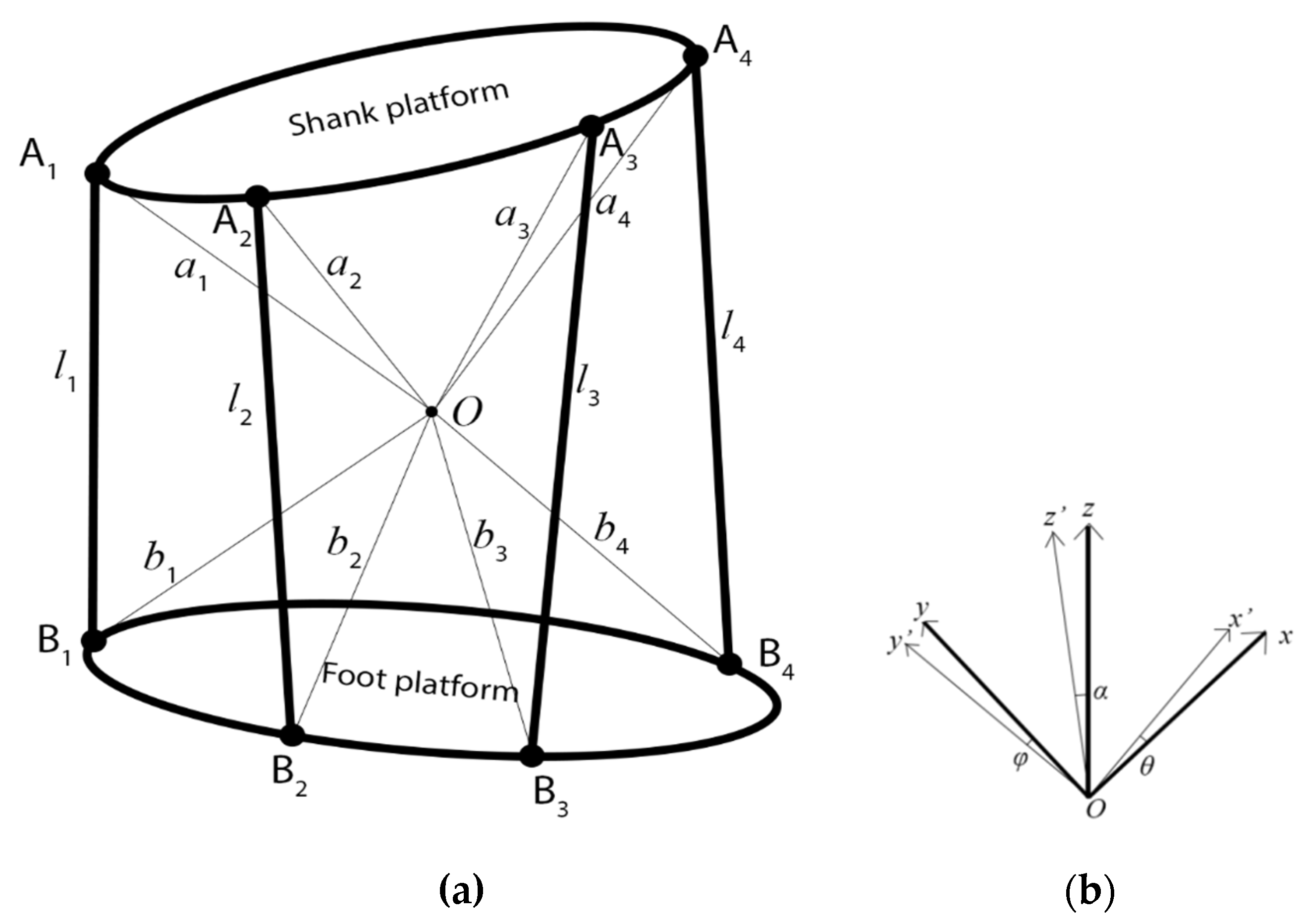
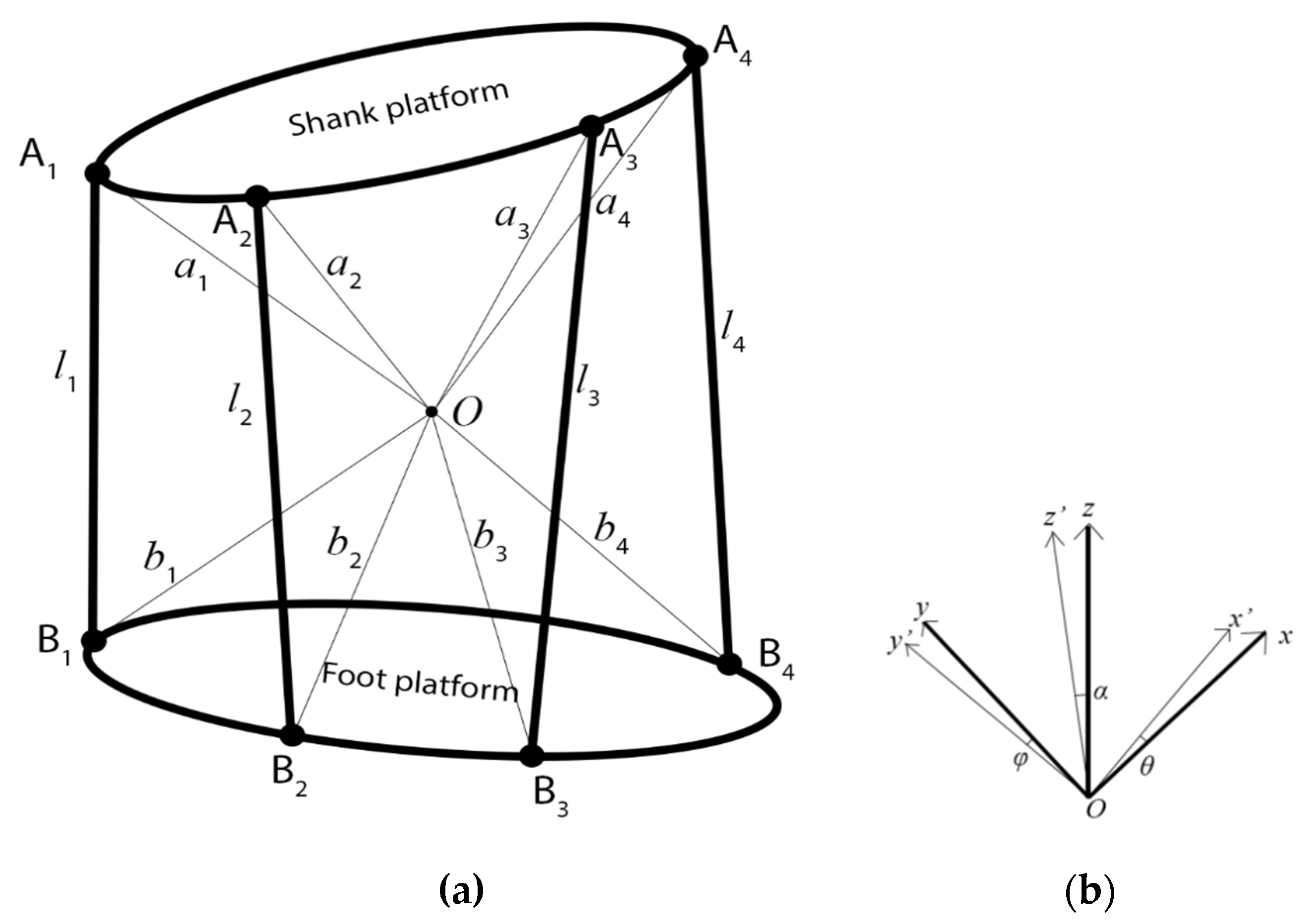
3.2. Kinematic Analysis
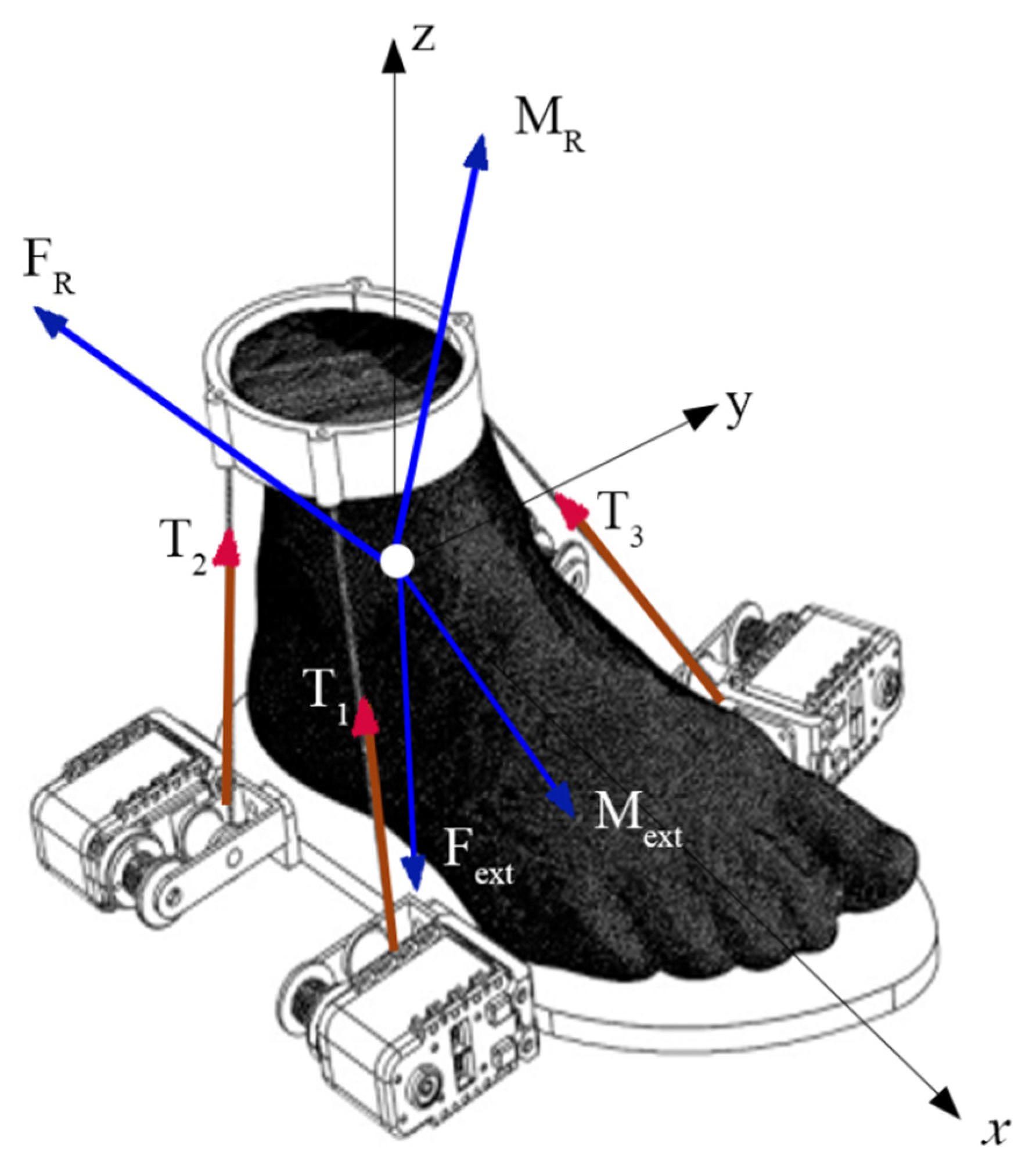
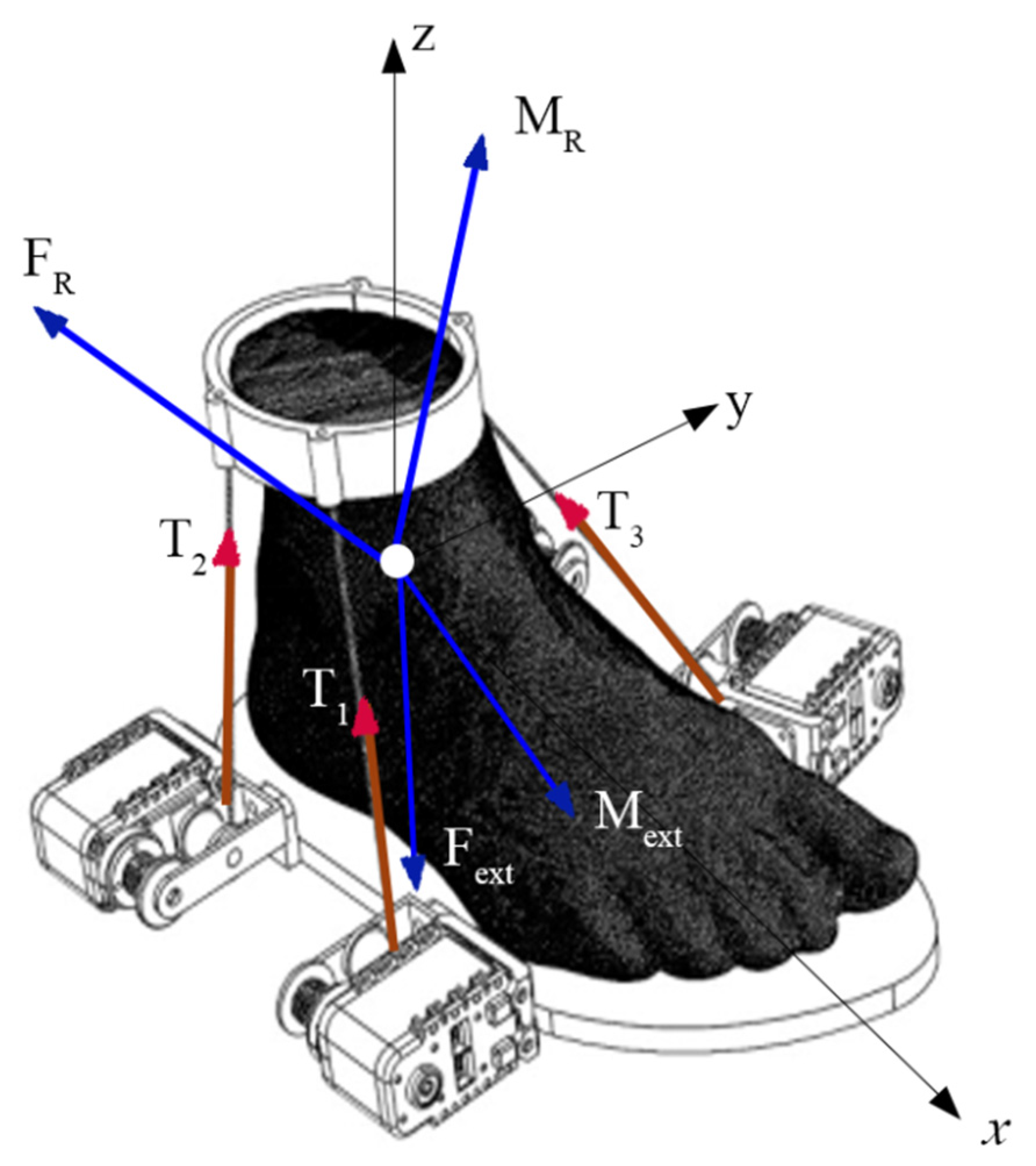
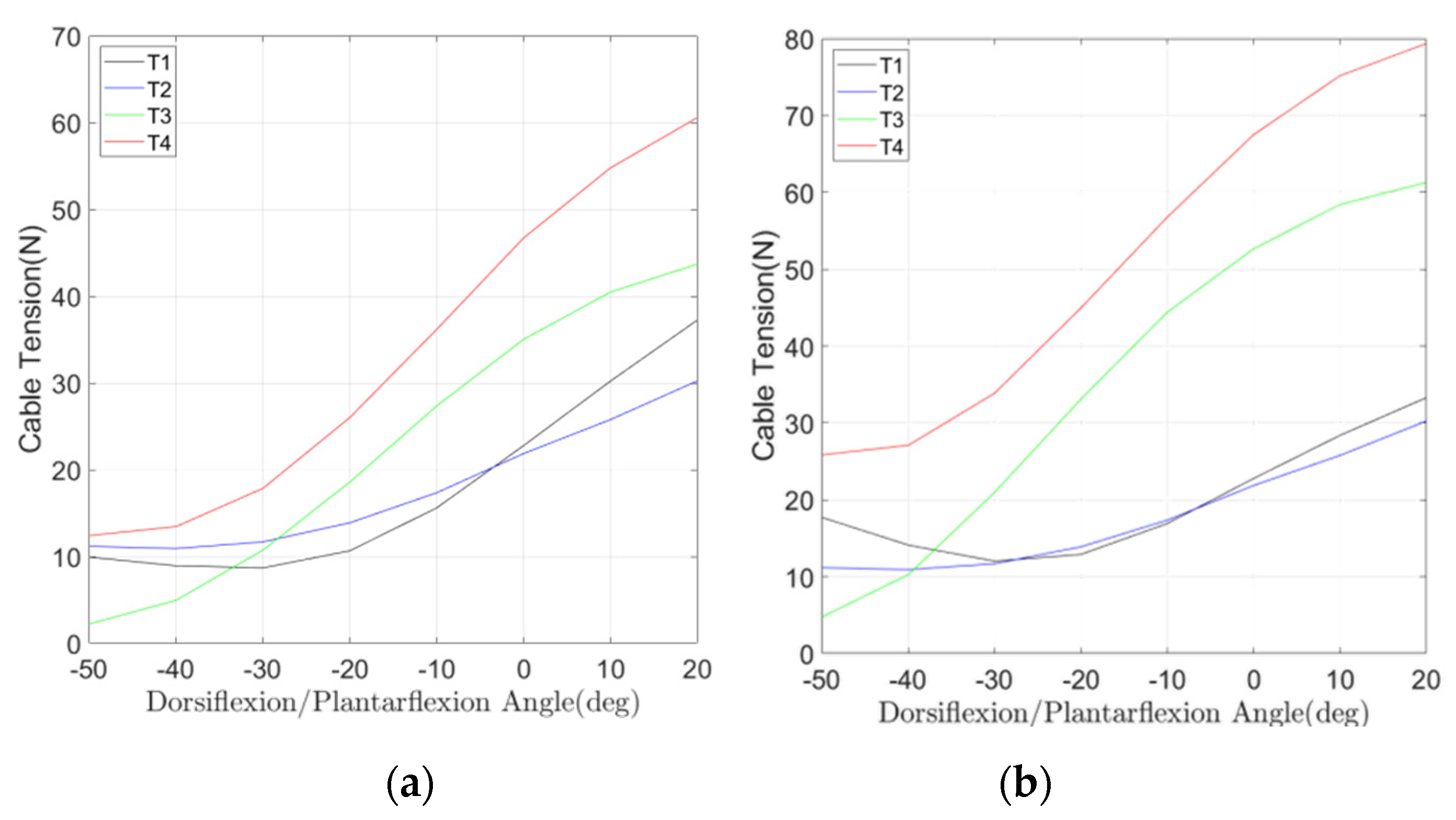
3.3. Static Analysis
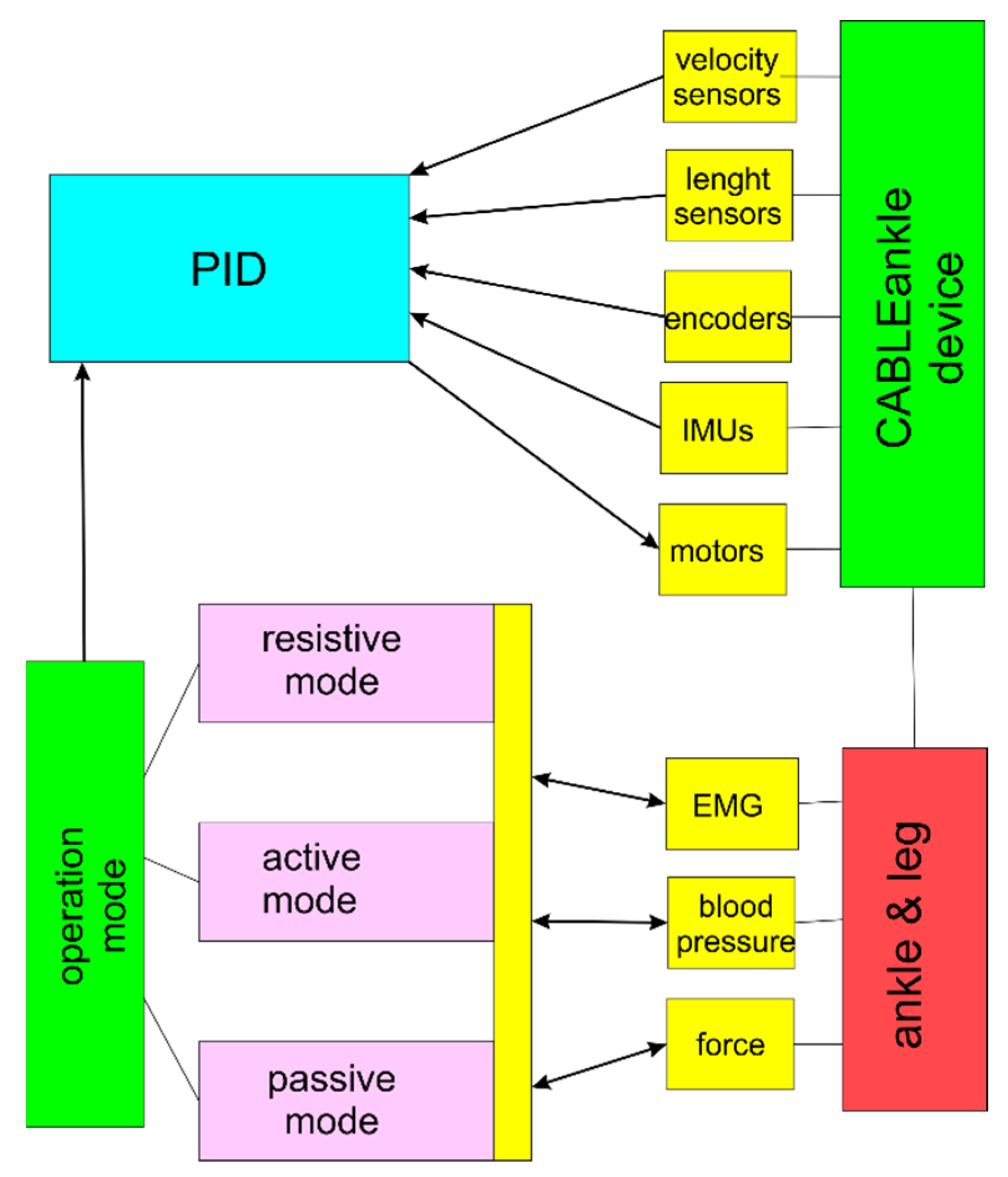
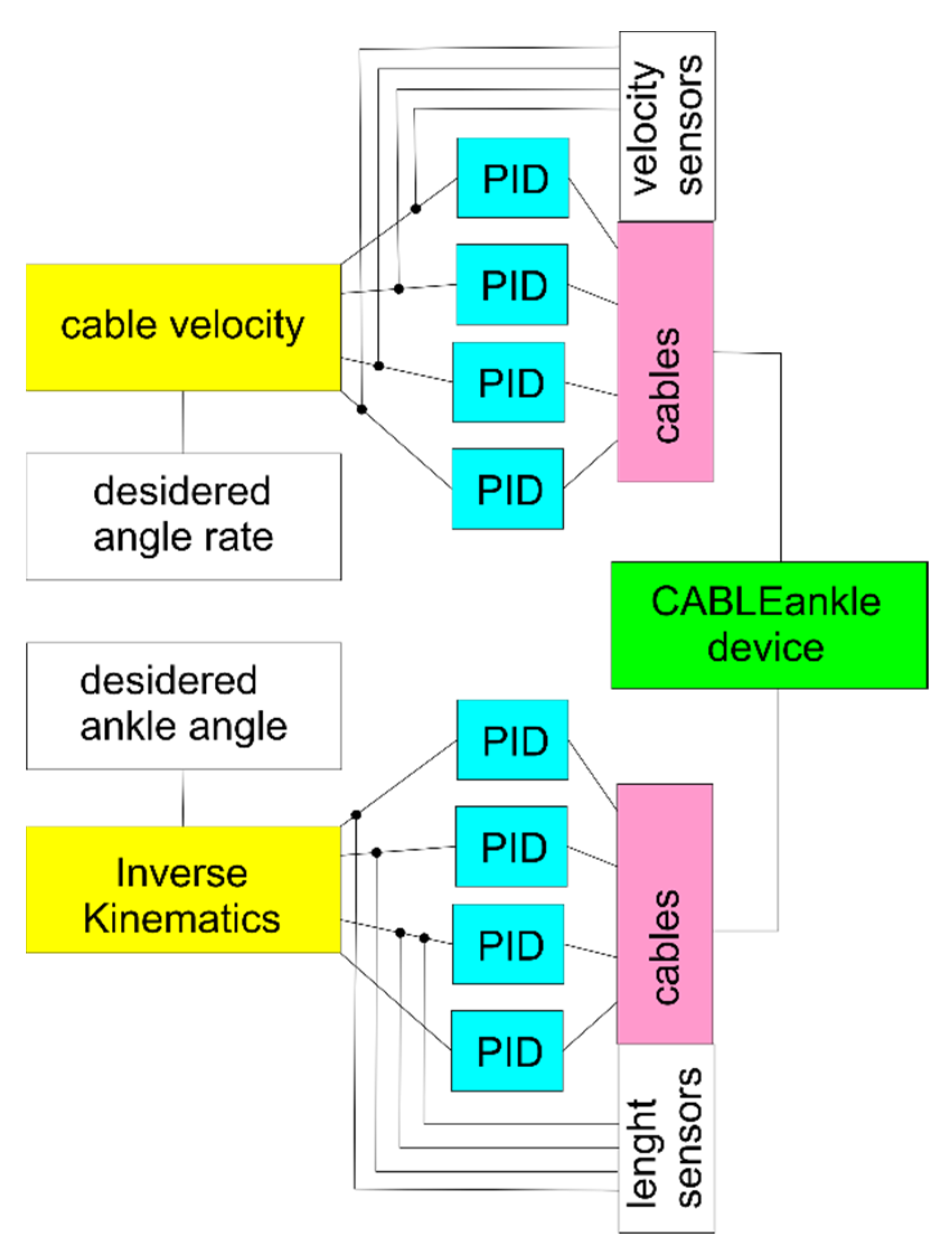
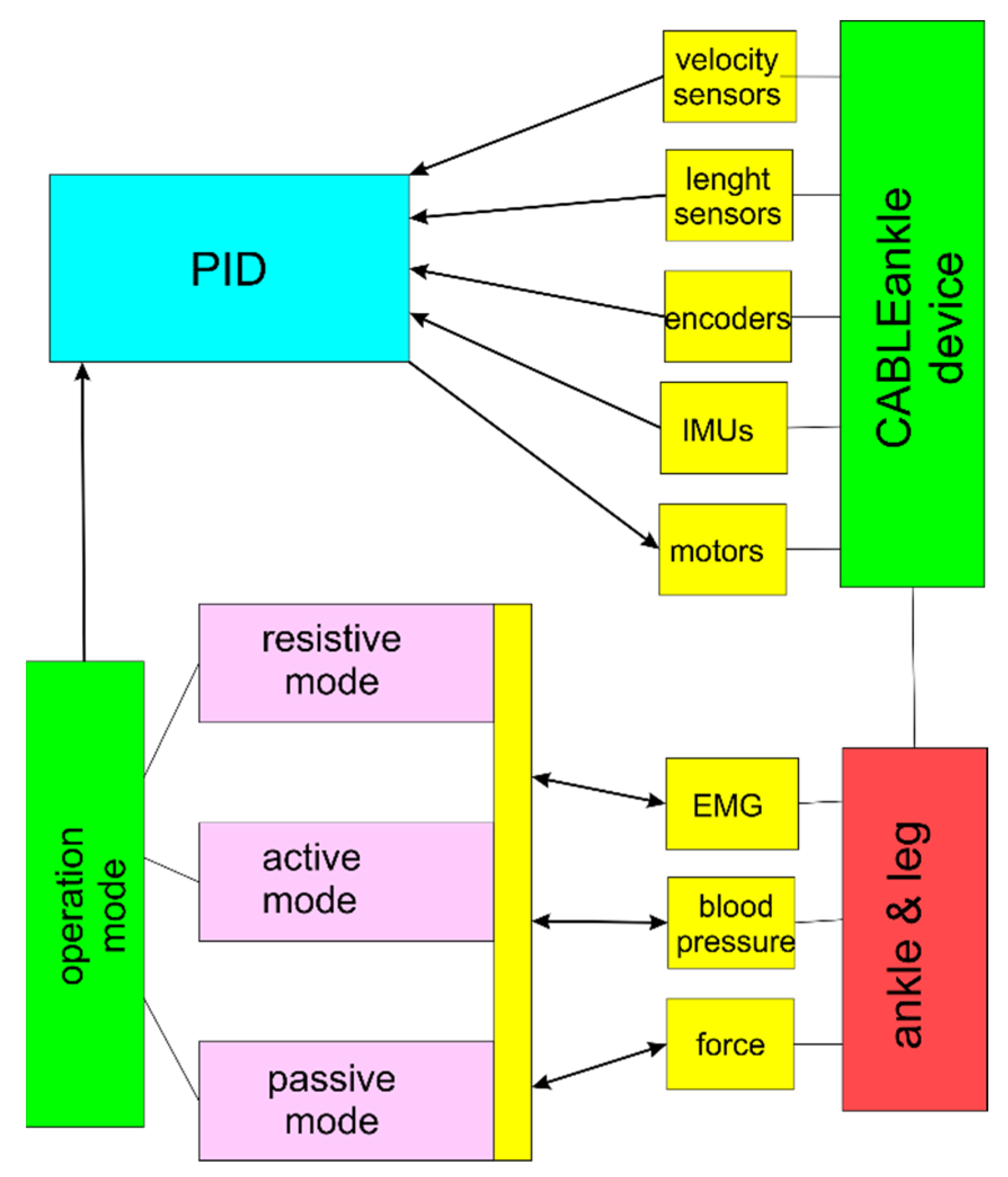
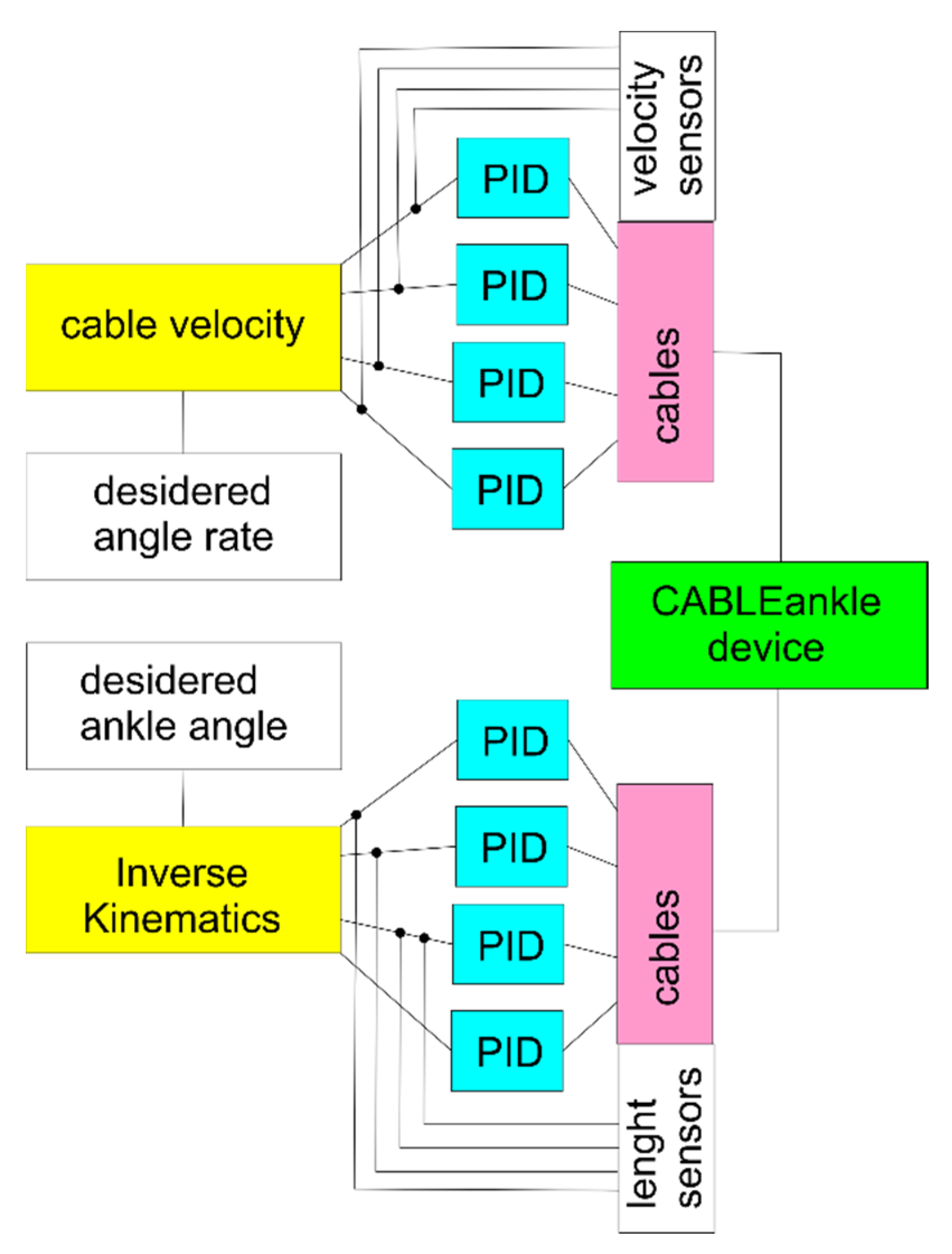
4. Solution for Control Design Unit
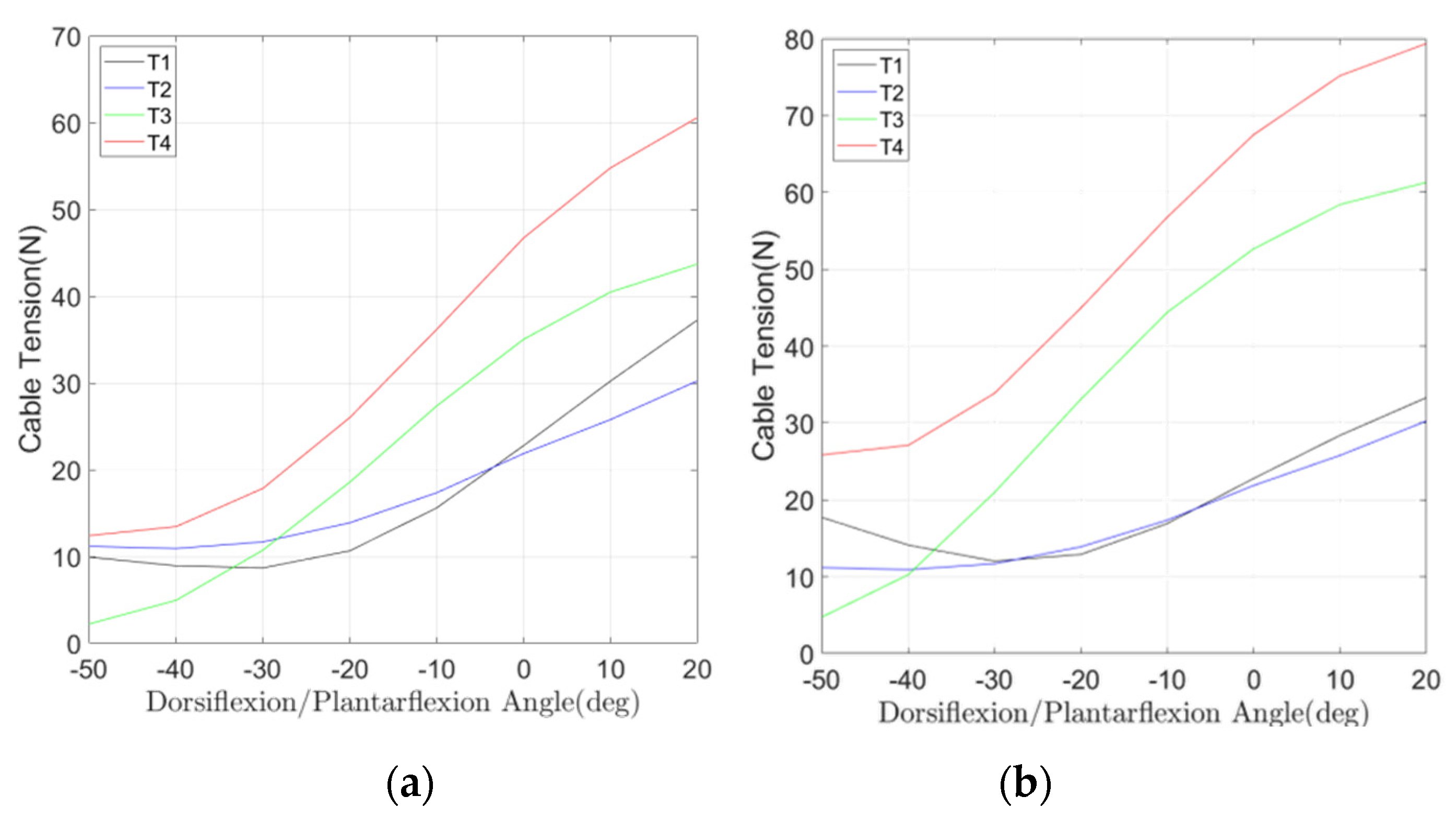
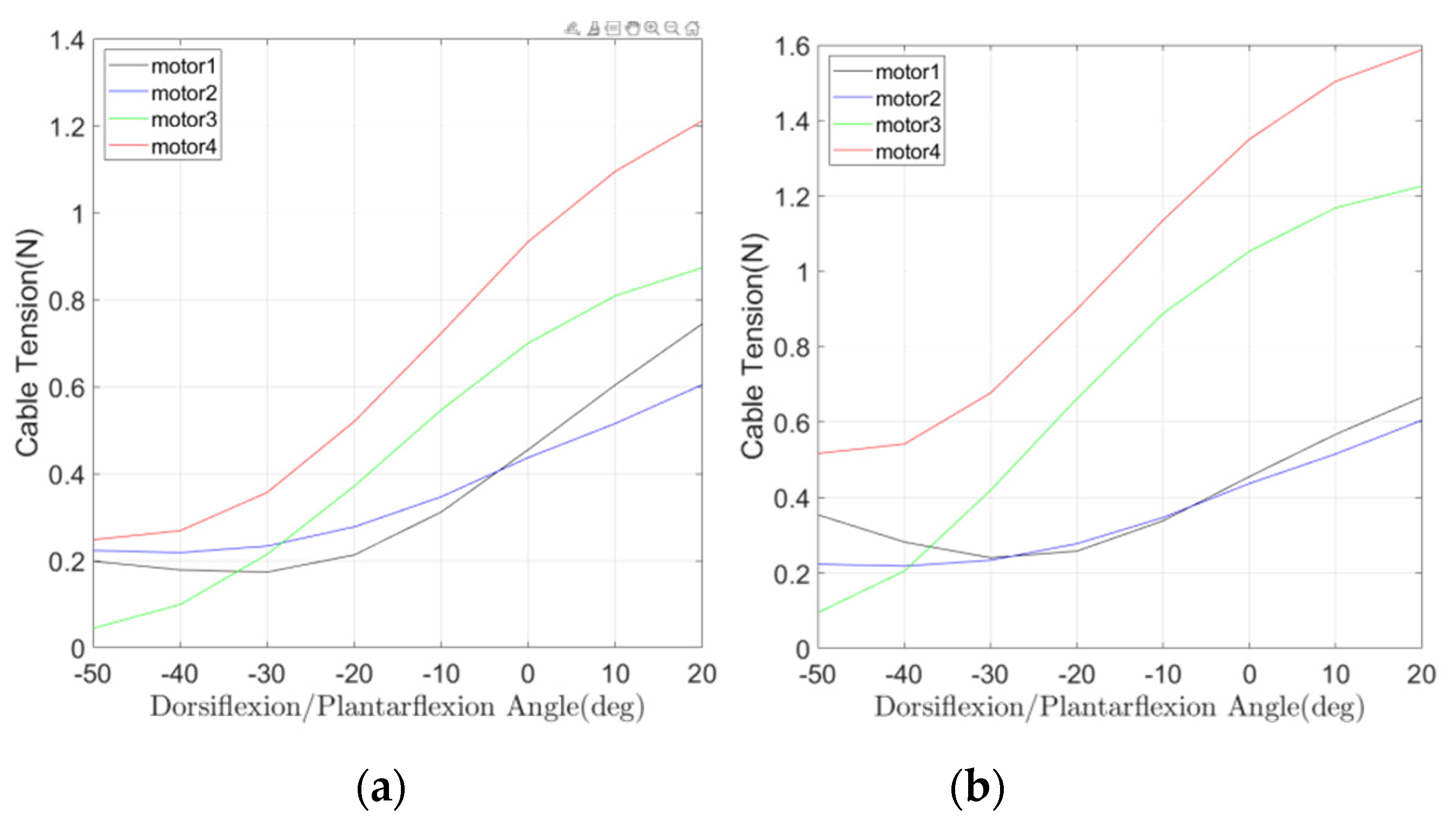
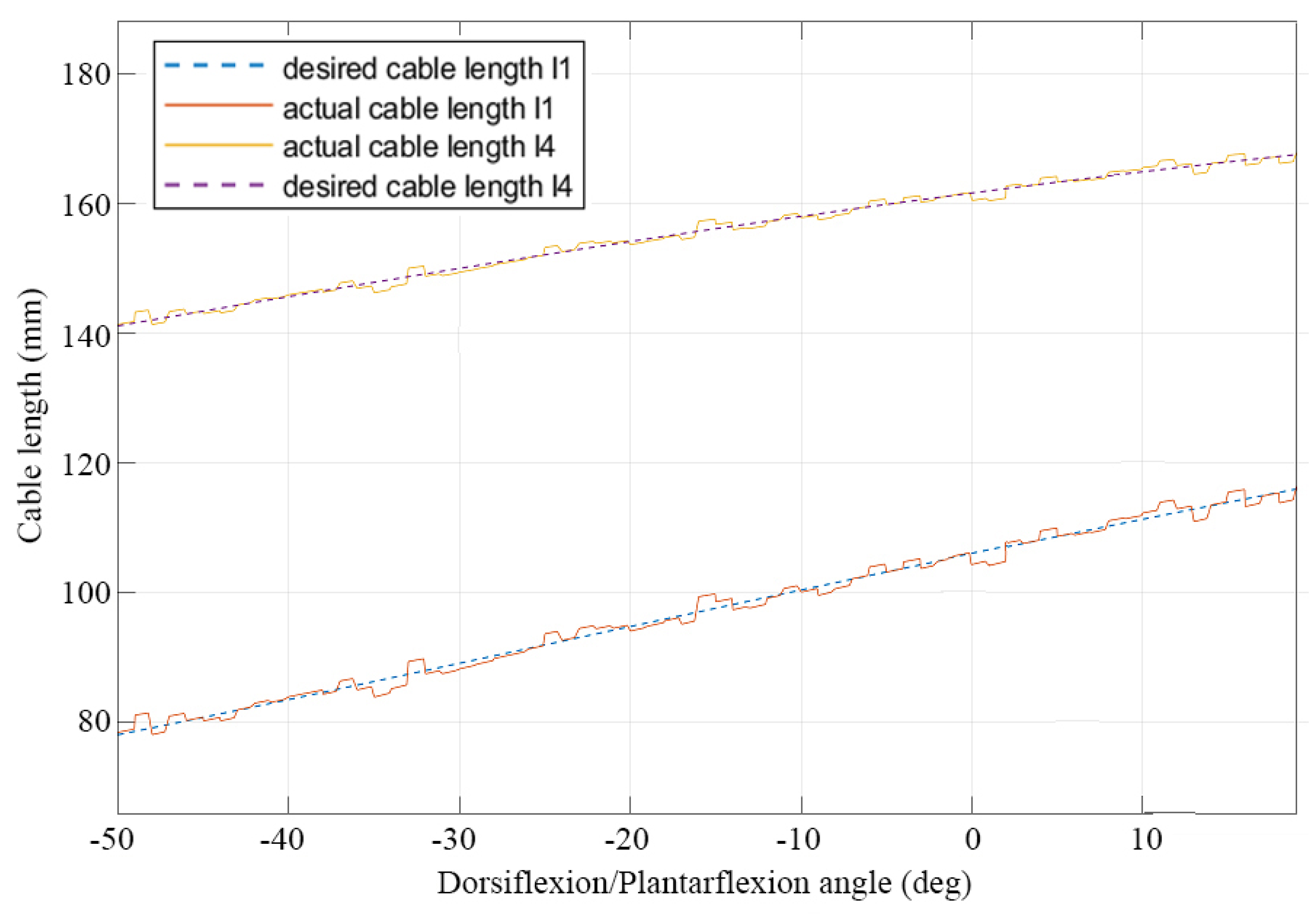
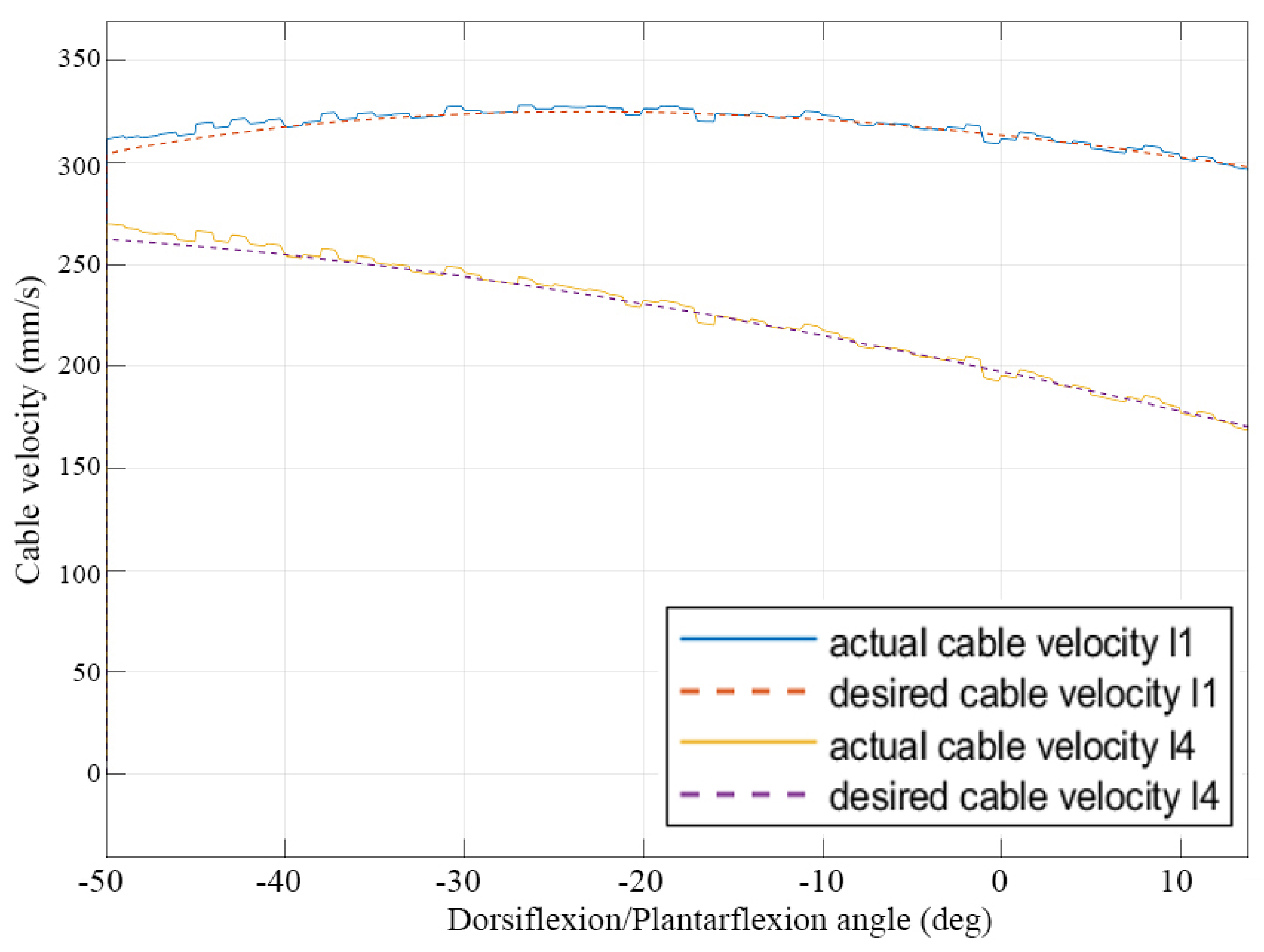
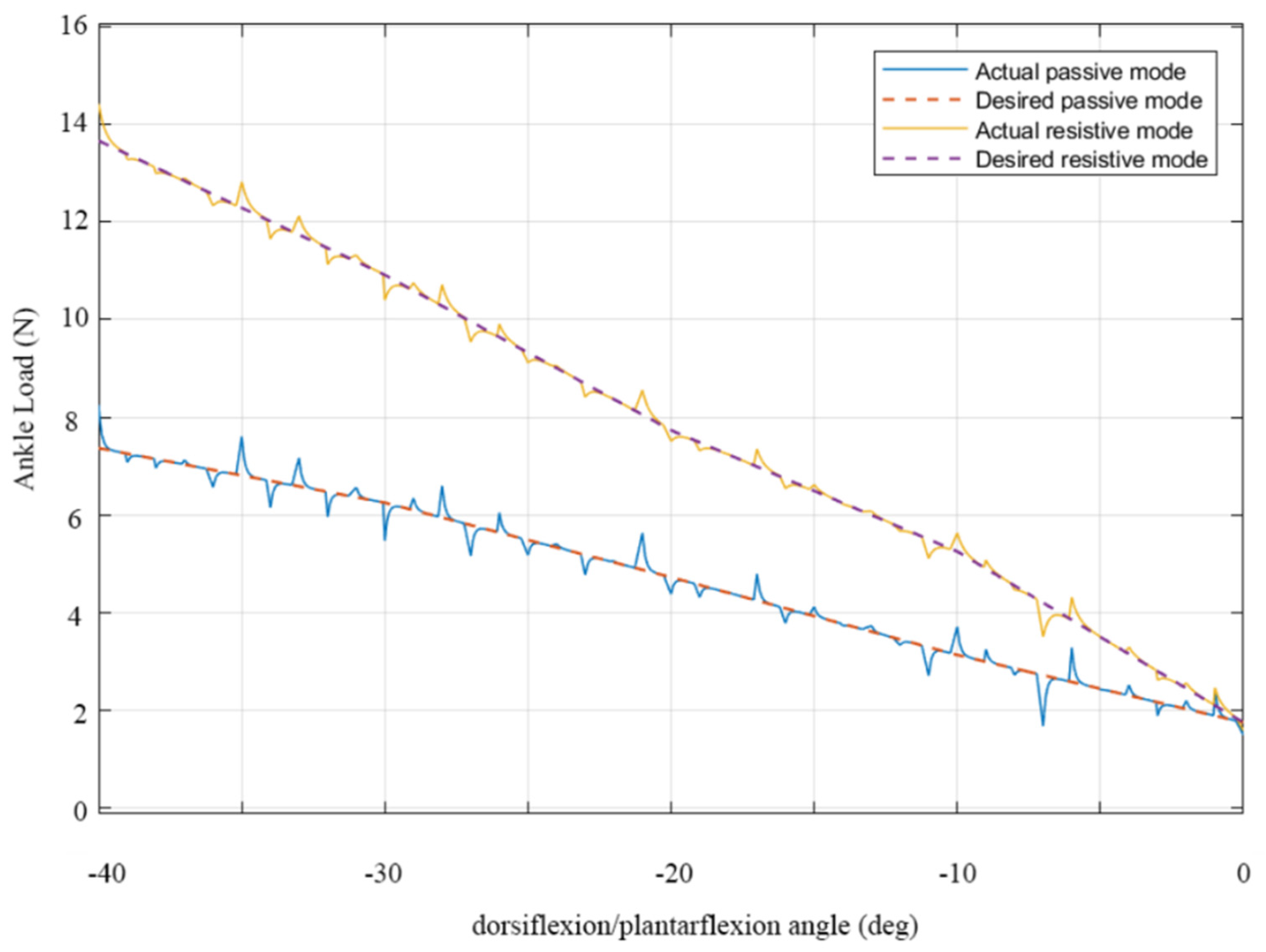
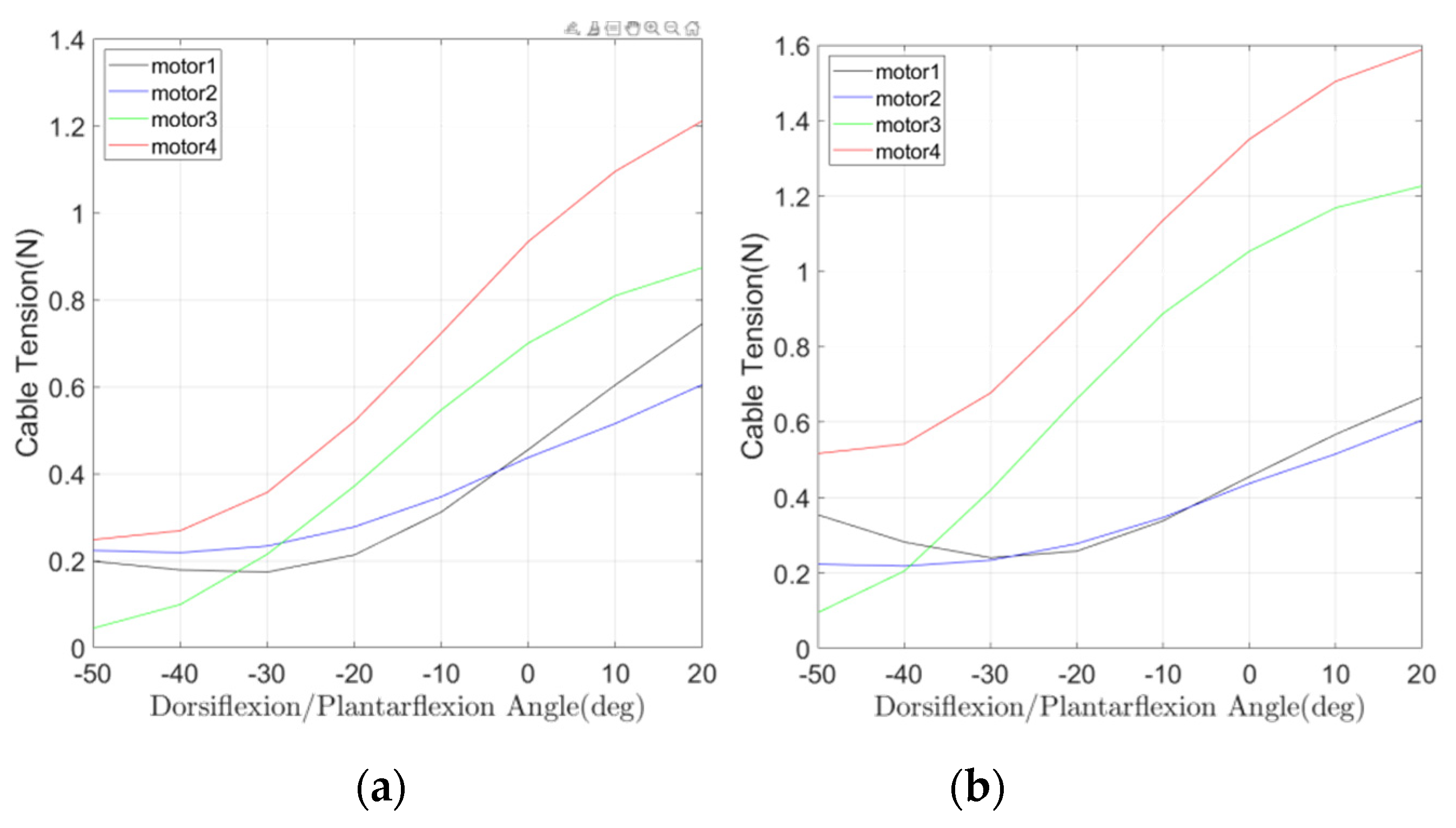
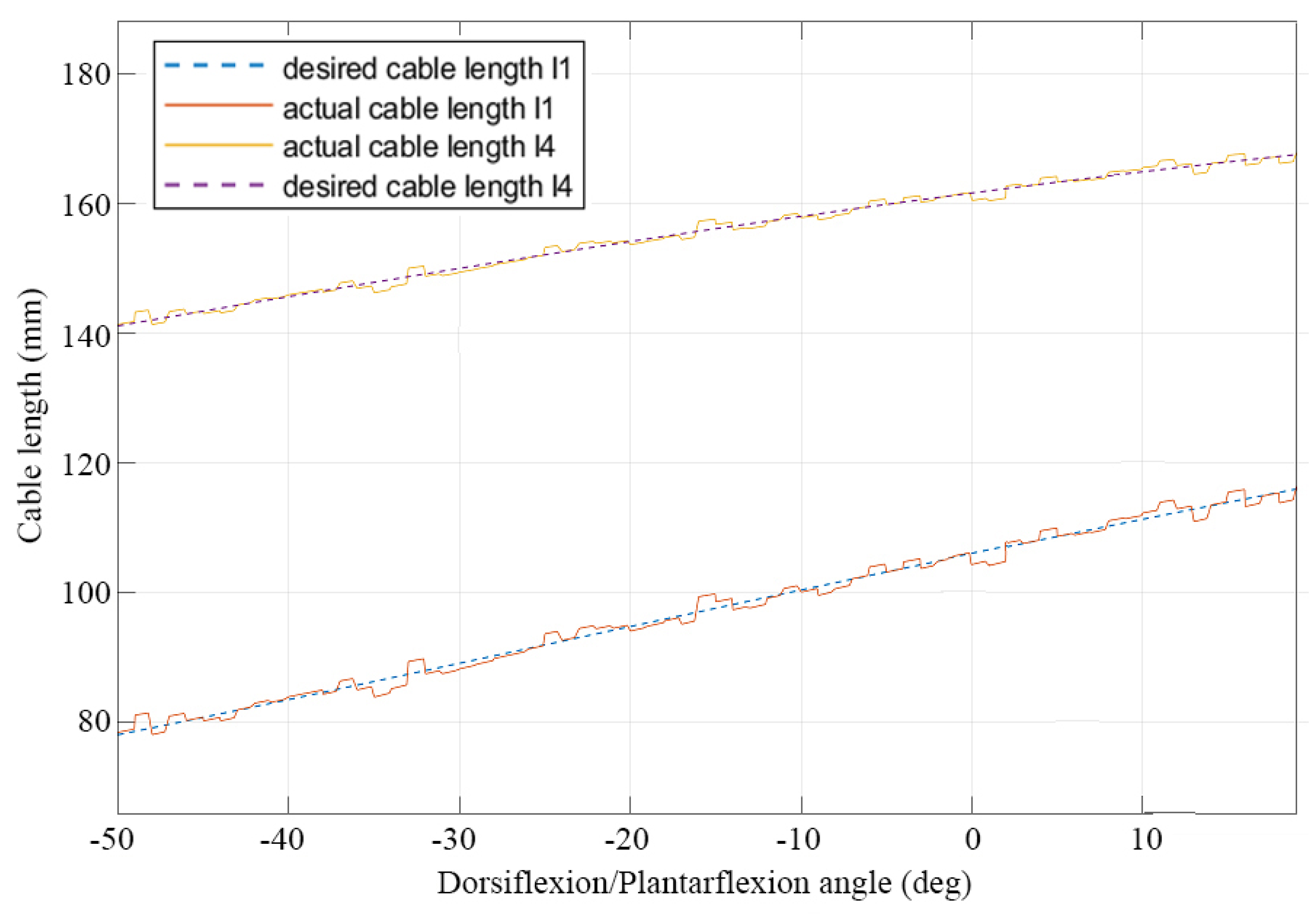
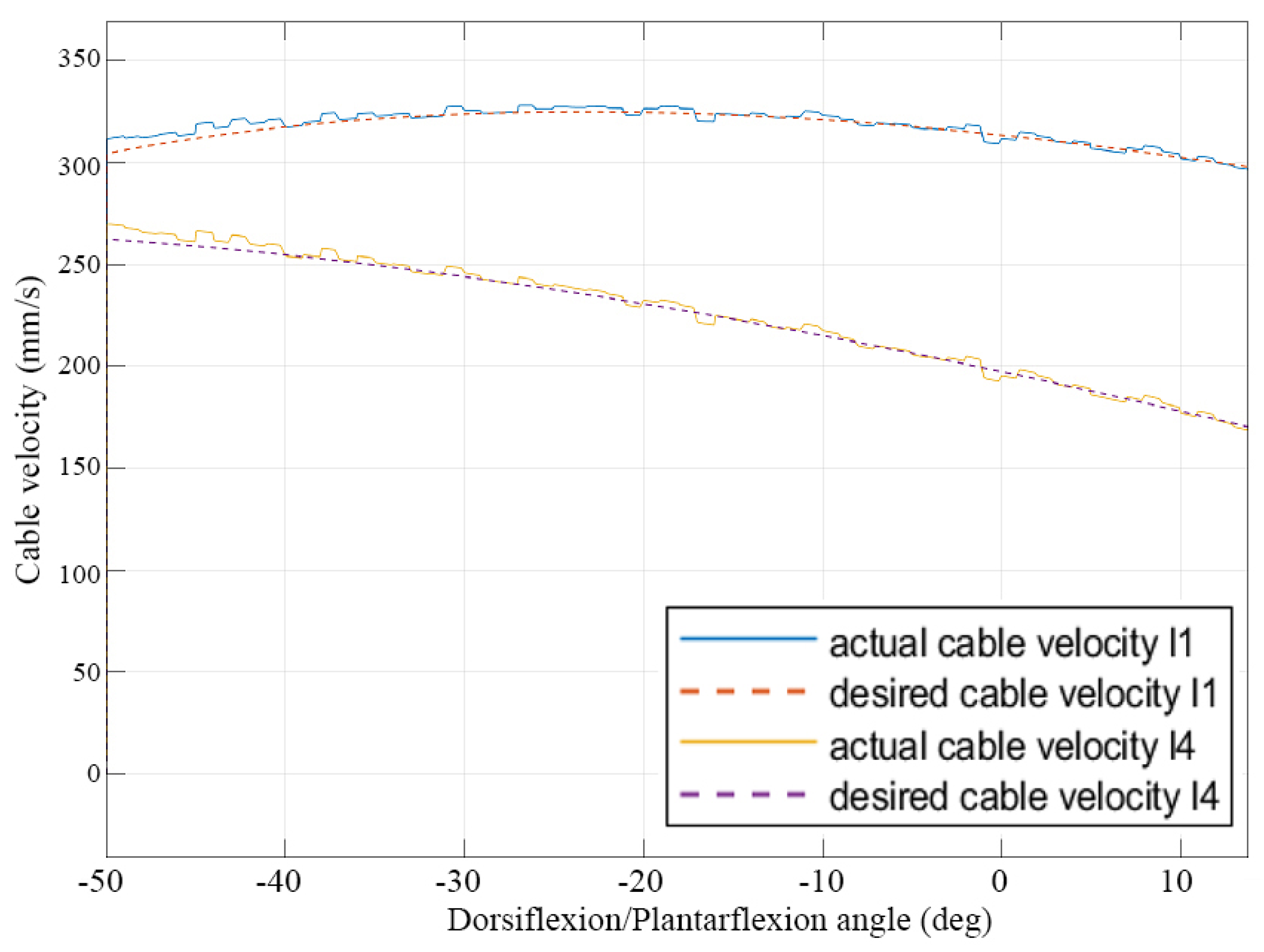
5. Performance Analysis
6. Discussion
Author Contributions
Funding
Conflicts of Interest
References
- Wang, C.; Wang, L.; Wang, T.; Li, H.; Du, W.; Meng, F.; Zhang, W. Research on an Ankle Joint Auxiliary Rehabilitation Robot with a Rigid-Flexible Hybrid Drive Based on a 2-S′PS′ Mechanism. Appl. Bionics Biomech. 2019, 2019, 7071064. [Google Scholar] [CrossRef] [Green Version]
- Brockett, C.L.; Chapman, G.J. Biomechanics of the ankle. Orthop. Trauma 2016, 30, 232–238. [Google Scholar] [CrossRef] [Green Version]
- Knudson, D. Fundamentals of Biomechanics; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2007. [Google Scholar]
- Mattacola, C.G.; Dwyer, M.K. Rehabilitation of the Ankle After Acute Sprain or Chronic Instability. J. Athl. Train. 2002, 37, 413–429. [Google Scholar]
- Chen, E.T.; McInnis, K.C.; Borg-Stein, J. Ankle sprains: Evaluation, rehabilitation, and prevention. Curr. Sports Med. Rep. 2019, 18, 217–223. [Google Scholar] [CrossRef]
- Chinn, L.; Hertel, J. Rehabilitation of Ankle and Foot Injuries in Athletes. Clin. Sports Med. 2010, 29, 157–167. [Google Scholar] [CrossRef] [Green Version]
- Nagaya, S.; Hayashi, H.; Fujimoto, E.; Maruoka, N.; Kobayashi, H. Passive ankle movement increases cerebral blood oxygenation in the elderly: An experimental study. BMC Nurs. 2015, 14, 14. [Google Scholar] [CrossRef] [Green Version]
- Díaz, I.; Gil, J.J.; Sánchez, E. Lower-Limb Robotic Rehabilitation: Literature Review and Challenges. J. Robot. 2011, 2011, 759764. [Google Scholar] [CrossRef]
- Zhang, M.; Davies, T.C.; Xie, S. Effectiveness of robot-assisted therapy on ankle rehabilitation–a systematic review. J. Neuroeng. Rehabil. 2013, 10, 30. [Google Scholar] [CrossRef] [Green Version]
- Alvarez-Perez, M.G.; Garcia-Murillo, M.A.; Cervantes-Sánchez, J.J. Robot-assisted ankle rehabilitation: A review. Disabil. Rehabil. Assist. Technol. 2020, 15, 394–408. [Google Scholar] [CrossRef]
- Miao, Q.; Zhang, M.; Wang, C.; Li, H. Towards Optimal Platform-Based Robot Design for Ankle Rehabilitation: The State of the Art and Future Prospects. J. Health Eng. 2018, 2018, 1534247. [Google Scholar] [CrossRef]
- Yoon, J.; Ryu, J.; Lim, K.-B. Reconfigurable ankle rehabilitation robot for various exercises. J. Robot. Syst. 2006, 22, S15–S33. [Google Scholar] [CrossRef]
- Jamwal, P.K.; Hussain, S.; Ghayesh, M.H.; Rogozina, S.V. Impedance Control of an Intrinsically Compliant Parallel Ankle Rehabilitation Robot. IEEE Trans. Ind. Electron. 2016, 63, 3638–3647. [Google Scholar] [CrossRef]
- Saglia, J.A.; Tsagarakis, N.G.; Dai, J.S.; Caldwell, D.G. Control Strategies for Patient-Assisted Training Using the Ankle Rehabilitation Robot (ARBOT). IEEE/ASME Trans. Mechatron. 2013, 18, 1799–1808. [Google Scholar] [CrossRef]
- Roy, A.; Krebs, H.I.; Williams, D.J.; Bever, C.T.; Forrester, L.W.; Macko, R.M.; Hogan, N. Robot-Aided Neurorehabilitation: A Novel Robot for Ankle Rehabilitation. IEEE Trans. Robot. 2009, 25, 569–582. [Google Scholar] [CrossRef]
- Rodríguez-León, J.F.; Chaparro-Rico, B.D.M.; Russo, M.; Cafolla, D. An Autotuning Cable-Driven Device for Home Rehabilitation. J. Health Eng. 2021, 2021, 6680762. [Google Scholar] [CrossRef]
- Sung, E.; Slocum, A.H.; Ma, R.; Bean, J.F.; Culpepper, M.L. Design of an Ankle Rehabilitation Device Using Compliant Mechanisms. J. Med. Devices 2011, 5, 011001. [Google Scholar] [CrossRef] [Green Version]
- Fan, Y.; Yin, Y. Mechanism design and motion control of a parallel ankle joint for rehabilitation robotic exoskeleton. In Proceedings of the 2009 IEEE International Conference on Robotics and Biomimetics (ROBIO), Guilin, China, 19–23 December 2009; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA; pp. 2527–2532. [Google Scholar]
- Lin, C.C.; Ju, M.S.; Chen, S.M.; Pan, B.W. A specialized robot for ankle rehabilitation and evaluation. J. Med. Biol. Eng. 2008, 28, 79–86. [Google Scholar]
- Chang, T.-C.; Zhang, X.-D. Kinematics and reliable analysis of decoupled parallel mechanism for ankle rehabilitation. Microelectron. Reliab. 2019, 99, 203–212. [Google Scholar] [CrossRef]
- Nurahmi, L.; Caro, S.; Solichin, M. A novel ankle rehabilitation device based on a reconfigurable 3-RPS parallel manipulator. Mech. Mach. Theory 2019, 134, 135–150. [Google Scholar] [CrossRef] [Green Version]
- Park, Y.-L.; Chen, B.-R.; Pérez-Arancibia, N.O.; Young, D.; Stirling, L.; Wood, R.J.; Goldfield, E.C.; Nagpal, R. Design and control of a bio-inspired soft wearable robotic device for ankle–foot rehabilitation. Bioinspir. Biomim. 2014, 9, 016007. [Google Scholar] [CrossRef]
- Liu, Q.; Zuo, J.; Zhu, C.; Meng, W.; Ai, Q.; Xie, S.Q. Design and Hierarchical Force-Position Control of Redundant Pneumatic Muscles-Cable-Driven Ankle Rehabilitation Robot. IEEE Robot. Autom. Lett. 2021, 7, 502–509. [Google Scholar] [CrossRef]
- Dong, M.; Zhou, Y.; Li, J.; Rong, X.; Fan, W.; Zhou, X.; Kong, Y. State of the art in parallel ankle rehabilitation robot: A systematic review. J. Neuroeng. Rehabil. 2021, 18, 52. [Google Scholar] [CrossRef] [PubMed]
- Cafolla, D.; Russo, M.; Carbone, G. Design and Validation of an Inherently-Safe Cable-Driven Assisting Device. Int. J. Mech. Control. 2018, 19, 23–32. [Google Scholar]
- Aggogeri, F.; Pellegrini, N.; Adamini, R. Functional Design in Rehabilitation: Modular Mechanisms for Ankle Complex. Appl. Bionics Biomech. 2016, 2016, 9707801. [Google Scholar] [CrossRef] [Green Version]
- Dai, J.S.; Zhao, T.; Nester, C. Sprained Ankle Physiotherapy Based Mechanism Synthesis and Stiffness Analysis of a Robotic Rehabilitation Device. Auton. Robot. 2004, 16, 207–218. [Google Scholar] [CrossRef]
- Liu, Q.; Wang, C.; Long, J.J.; Sun, T.; Duan, L.; Zhang, X.; Zhang, B.; Shen, Y.; Shang, W.; Lin, Z.; et al. Development of a New Robotic Ankle Rehabilitation Platform for Hemiplegic Patients after Stroke. J. Health Eng. 2018, 2018, 3867243. [Google Scholar] [CrossRef] [Green Version]
- Russo, M.; Ceccarelli, M. Analysis of a Wearable Robotic System for Ankle Rehabilitation. Machines 2020, 8, 48. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, K.; Zhang, Z.; Mo, Z. Control strategy and experimental research of a cable-driven lower limb rehabilitation robot. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2021, 235, 2468–2481. [Google Scholar] [CrossRef]
- Oyman, E.L.; Korkut, M.Y.; Ylmaz, C.; Bayraktaroglu, Z.Y.; Arslan, M.S. Design and control of a cable-driven rehabilitation robot for upper and lower limbs. Robotica 2021, 40, 1–37. [Google Scholar] [CrossRef]
- Russo, M.; Ceccarelli, M. A Wearable Device for Ankle Motion Assistance. In Advances in Italian Mechanism Science; Springer: Berlin, Germany, 2020; pp. 173–181. [Google Scholar] [CrossRef]
- Russo, M.; Raimondi, L.; Dong, X.; Axinte, D.; Kell, J. Task-oriented optimal dimensional synthesis of robotic manipulators with limited mobility. Robot. Comput. Manuf. 2021, 69, 102096. [Google Scholar] [CrossRef]
- Cloughley, W.B.; Mawdsley, R.H. Effect of Running on Volume of the Foot and Ankle. J. Orthop. Sports Phys. Ther. 1995, 22, 151–154. [Google Scholar] [CrossRef] [PubMed]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Motion | Dorsiflexion | Plantarflexion | Abduction/Addjuction | Inversion/Eversion |
|---|---|---|---|---|
| Range Limits | 20 deg | 50 deg | +/−10 deg | +/−12 deg |
| Shank Platform (mm) | Foot Platform (mm) | Control Parameters |
|---|---|---|
| = (20 30 50)T | = (80 75 −40)T | li ∈ [20 mm, 200 mm] ϕ ∈ [−50°, 20°] |
| = (−20 30 50)T | = (0 60 −40)T | |
| = (20 −30 50)T | = (10 60 −40)T | |
| = (−20 −30 50)T | = (90 60 −40)T |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Venkata Sai Prathyush, I.; Ceccarelli, M.; Russo, M. Control Design for CABLEankle, a Cable Driven Manipulator for Ankle Motion Assistance. Actuators 2022, 11, 63. https://doi.org/10.3390/act11020063
Venkata Sai Prathyush I, Ceccarelli M, Russo M. Control Design for CABLEankle, a Cable Driven Manipulator for Ankle Motion Assistance. Actuators. 2022; 11(2):63. https://doi.org/10.3390/act11020063
Chicago/Turabian StyleVenkata Sai Prathyush, Idumudi, Marco Ceccarelli, and Matteo Russo. 2022. "Control Design for CABLEankle, a Cable Driven Manipulator for Ankle Motion Assistance" Actuators 11, no. 2: 63. https://doi.org/10.3390/act11020063
APA StyleVenkata Sai Prathyush, I., Ceccarelli, M., & Russo, M. (2022). Control Design for CABLEankle, a Cable Driven Manipulator for Ankle Motion Assistance. Actuators, 11(2), 63. https://doi.org/10.3390/act11020063