
Robotic Sponge and Watercolor Painting Based on Image-Processing and Contour-Filling Algorithms

 ,
, 
 ,
,  and
and 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Theoretical Framework
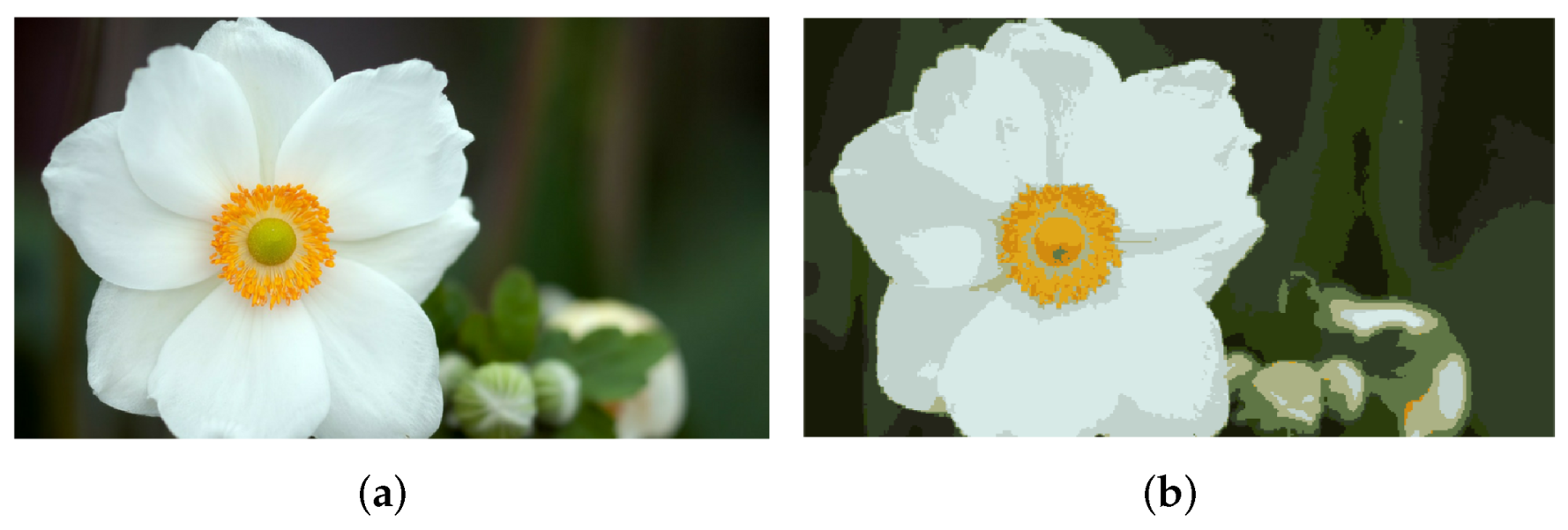
- Image preparation: The image was analyzed, and a color reduction was performed. After that, the contours of the uniformly colored areas were carried out;
- Area division: This passage can be skipped according to the artist that uses the software tool; if selected, it performs a Voronoi partition of the area to be painted. This possibility was introduced for two reasons: (1) in order to break up the excessive regularity of a large background, which is usually not aesthetically pleasing; (2) to stop the painting process in case the partial results are not as expected;
- Image erosion: The obtained contours were eroded in such a way to prevent the sponge from painting beyond the area bounded by the edges;
- Contour-filling algorithm: This is the heart of the algorithm, where sponge positions and orientations (poses) are defined.
2.1. Image Preparation
2.2. Area Division
2.2.1. Image Erosion
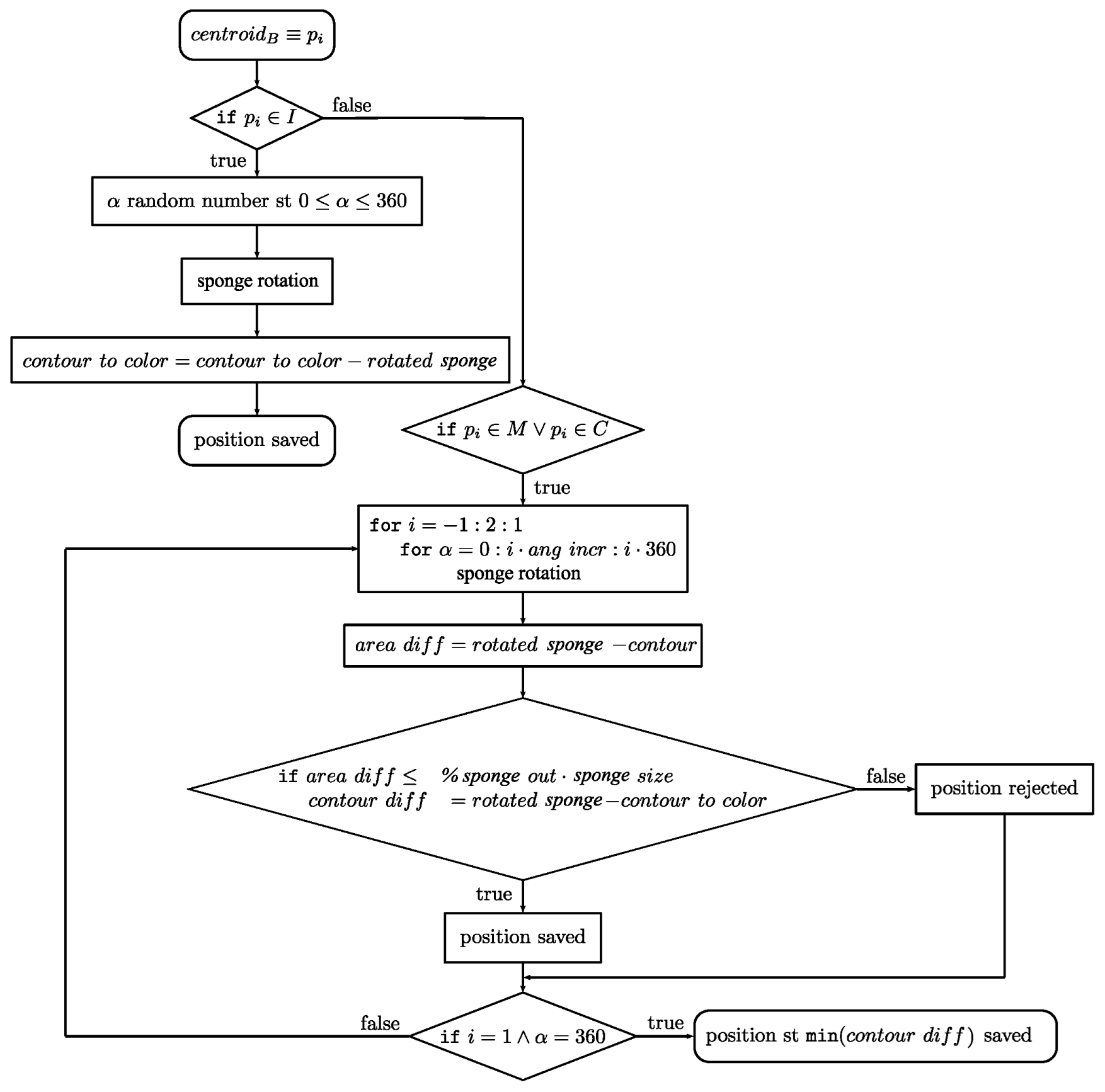
2.2.2. Contour-Filling Algorithm
- : coordinates of the sponge centroid;
- : point in which the sponge is placed. There are 3 possibilities:
- –
- ;
- –
- ;
- –
- ;
- : angle of rotation of the sponge around its centroid;
- contour to color: contour yet to be colored;
- ang incr: angular increment used in the for cycle;
- contour: external contour to color;
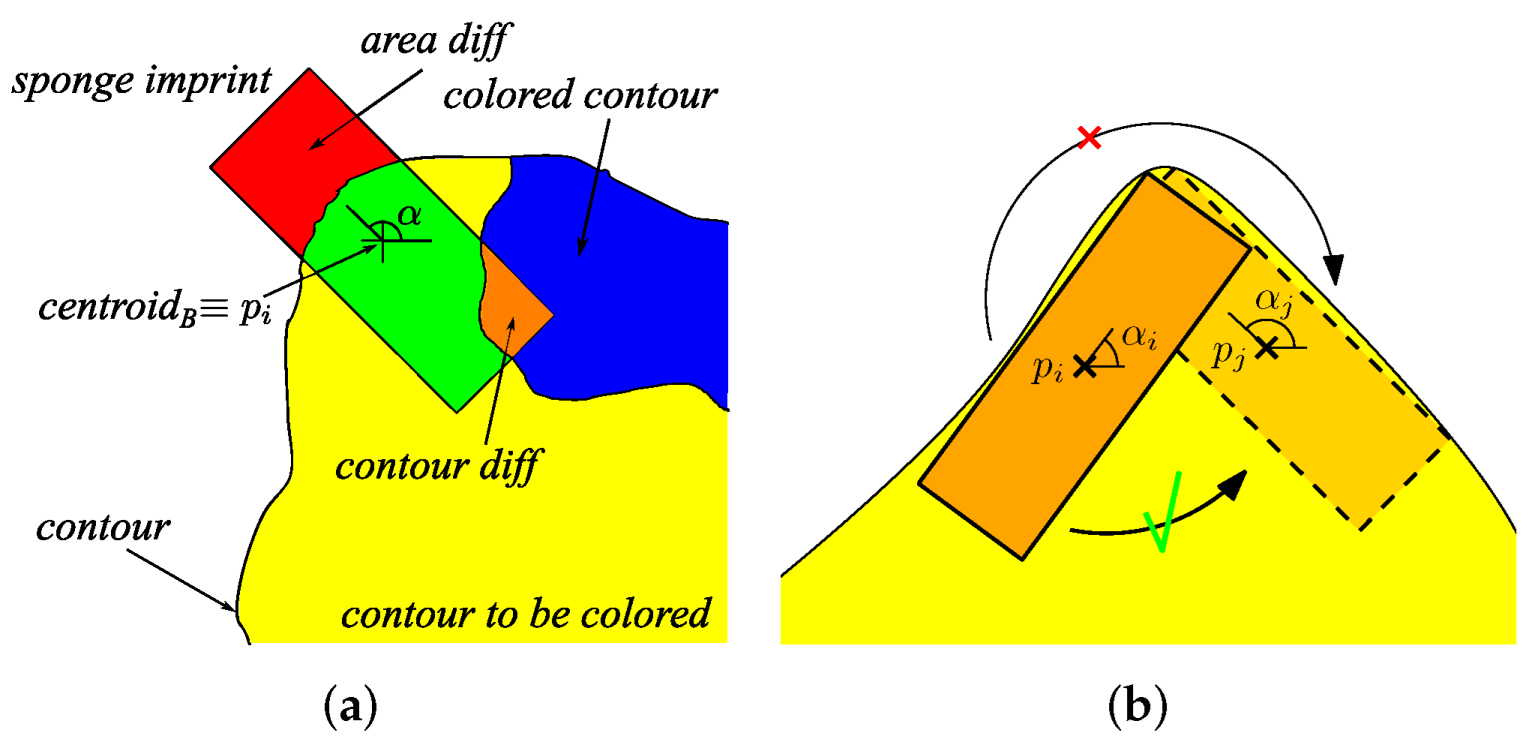
- area diff: area of the sponge imprint that falls outside the contour to color; this is the variable to minimize;
- % sponge out: maximum user-defined percentage of the sponge size accepted to be outside of the contour to color;
- contour diff: area where the already painted contour and the rotated sponge overlap.
- Dabbing technique: The sponge is moved between positions on the canvas by raising the sponge in the passage between points. This technique does not require particular care since the sponge positions are already defined;
- Dragging technique: The sponge is moved between positions on the canvas without being raised. This technique is more complex to simulate. Considering two defined points, and , if , with a user-defined maximum distance, a series of n intermediate points that connect and are created. In these intermediate points , the sponge imprint has to be verified; if it falls outside the area to paint, the sponge is raised. Furthermore, during the movement through the intermediate points , the sponge is smoothly rotated between the rotation configuration of and (the sequence of consecutive poses is interpolated). If the starting angular position is and the ending one is , the intermediate points’ angular positions are . It was also evaluated if the rotation was convenient to be clockwise or counterclockwise, with the goal of maximizing the coloring contribution to the area yet to be painted (Figure 4b). This process substantially corresponds to the addition of several poses to the original ones.
3. Materials and Methods
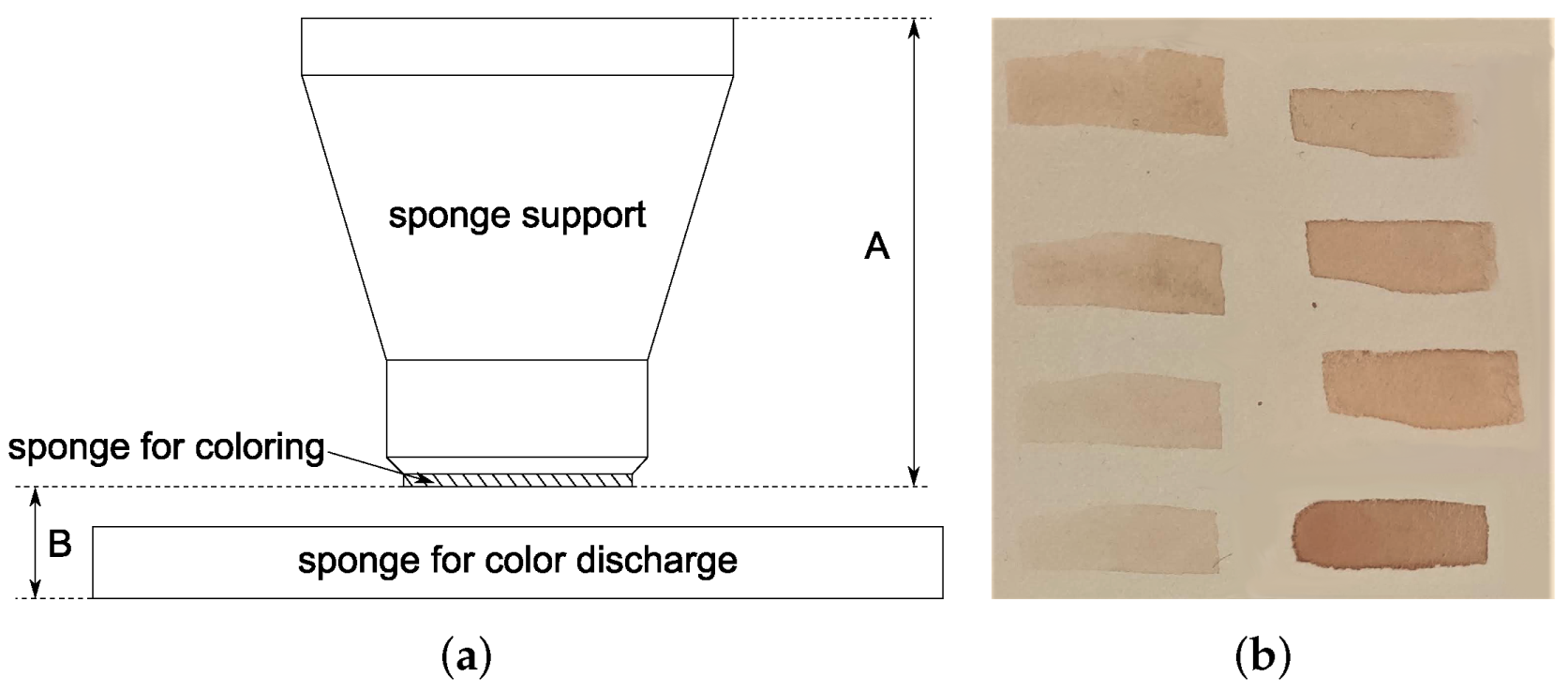
3.1. Watercolor Painting
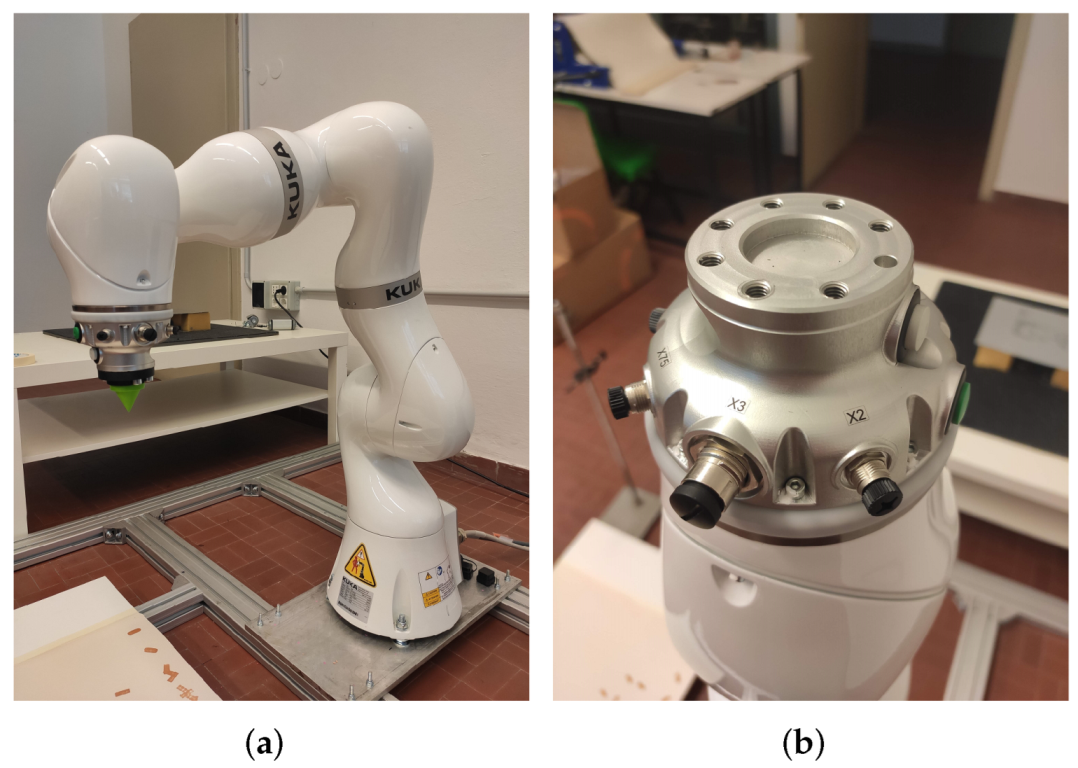
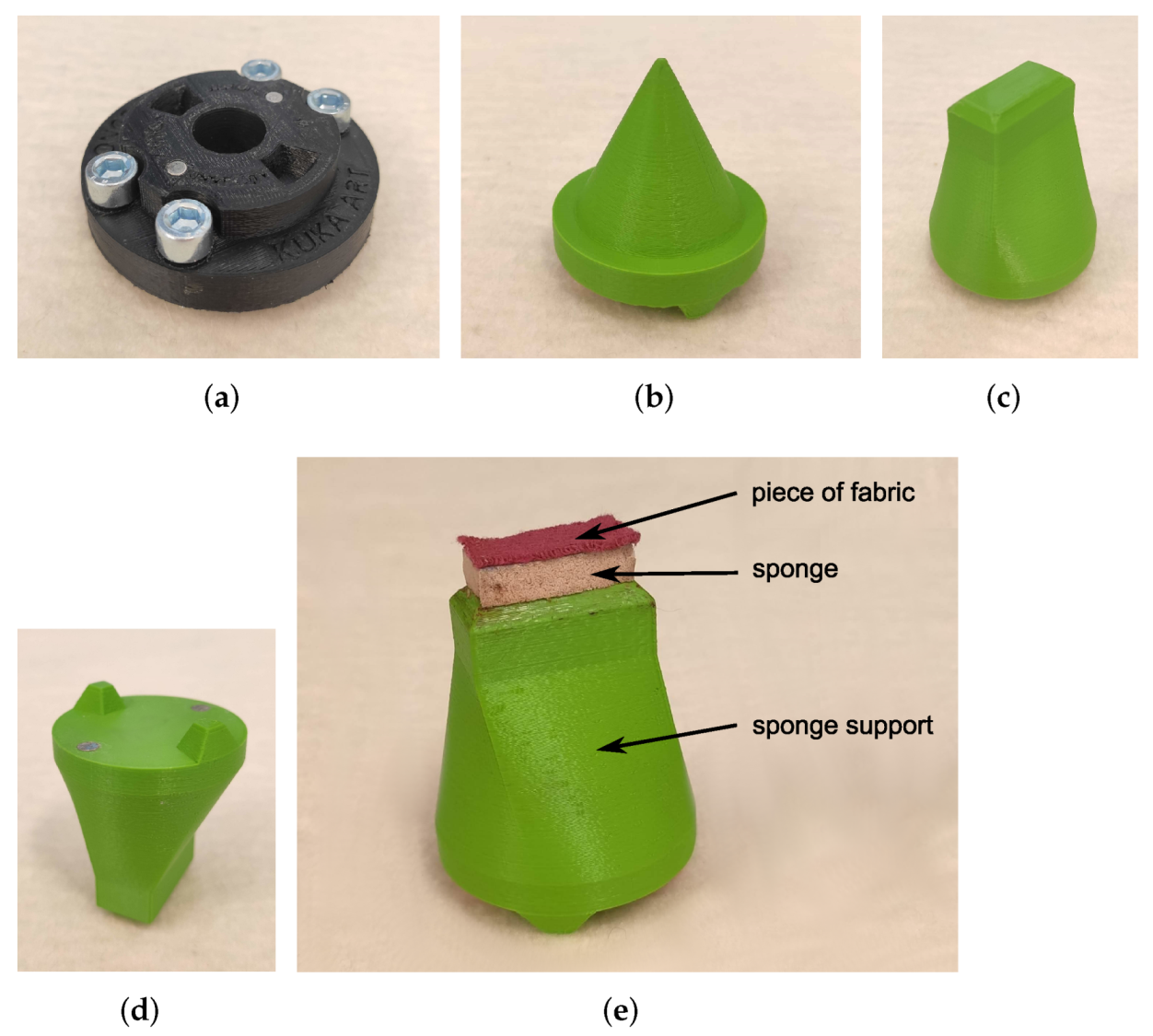
3.2. Robotic Painting System
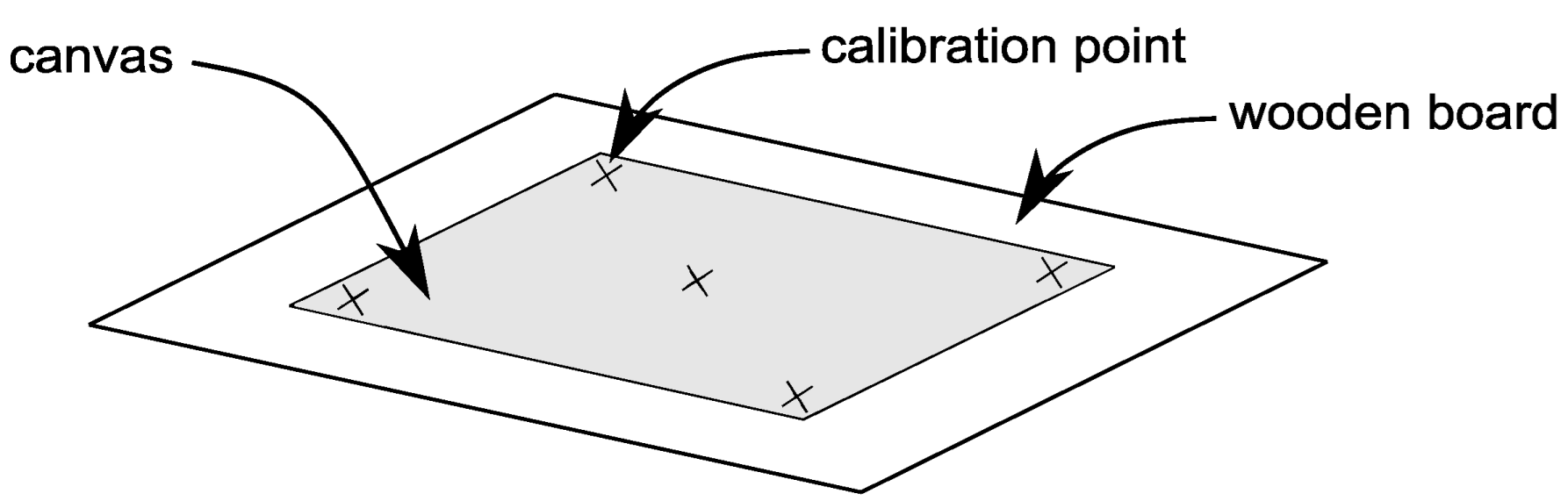
3.3. Calibration
4. Experimental Results and Discussion
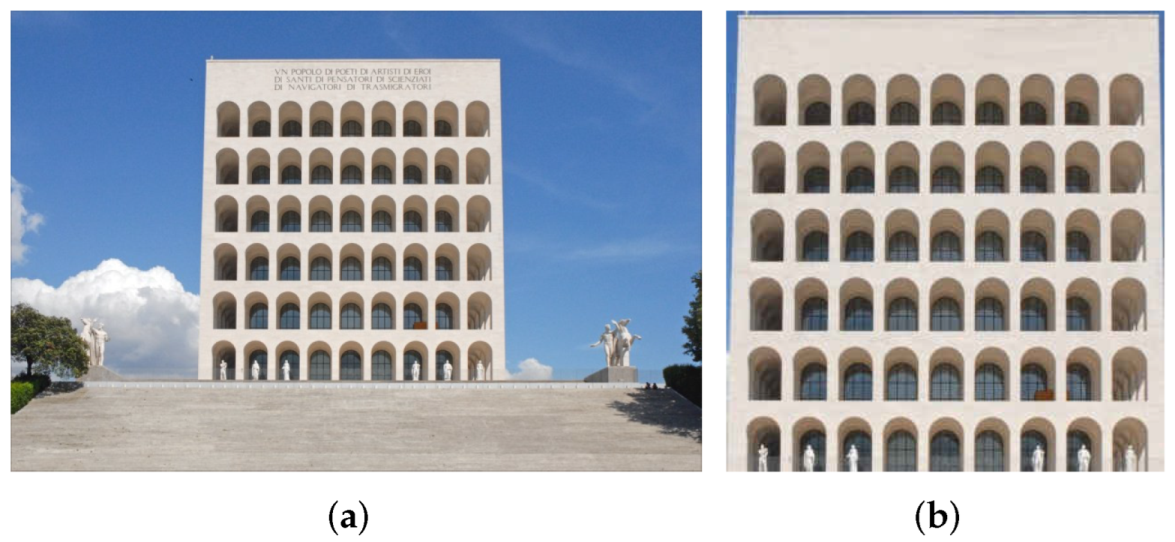
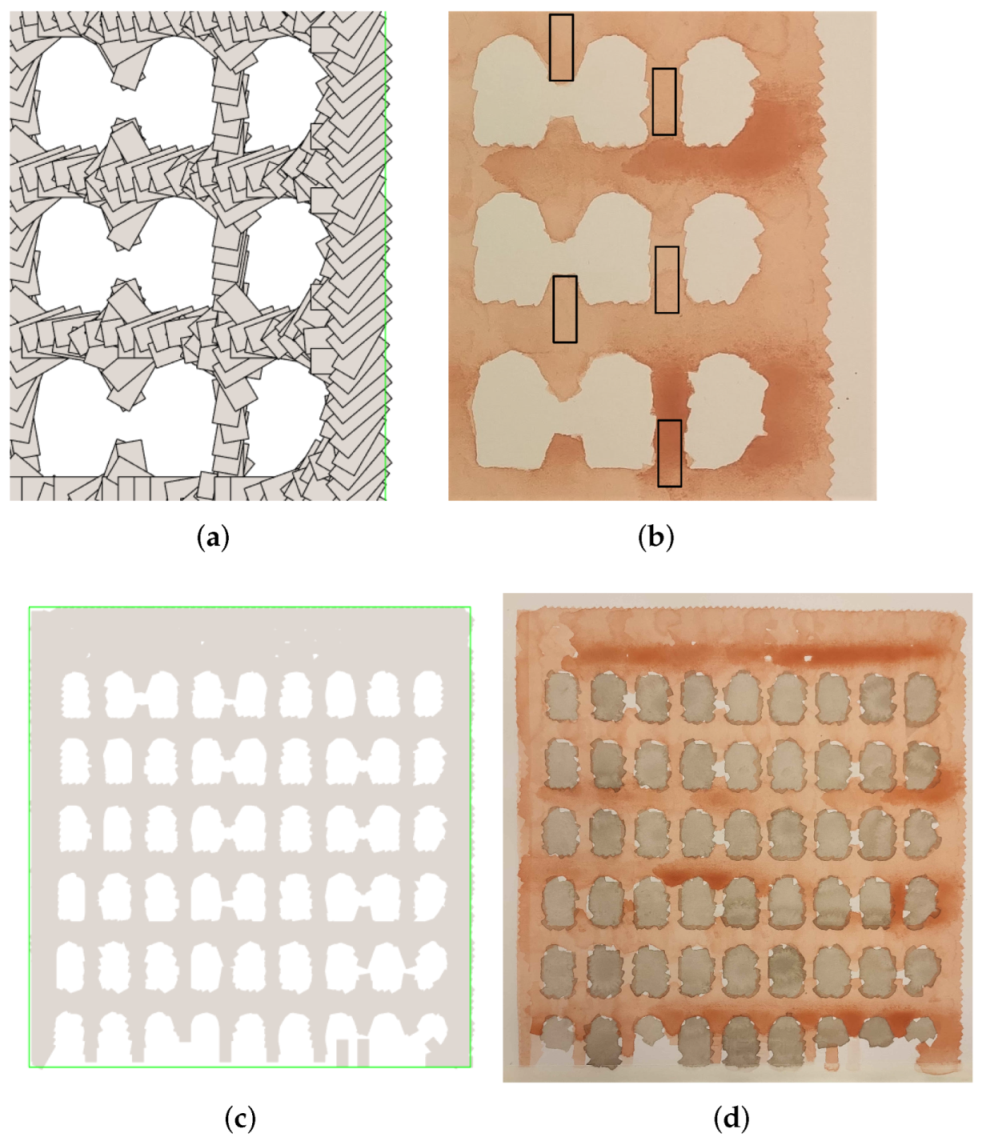
4.1. The “Palazzo Della Civiltà Italiana”
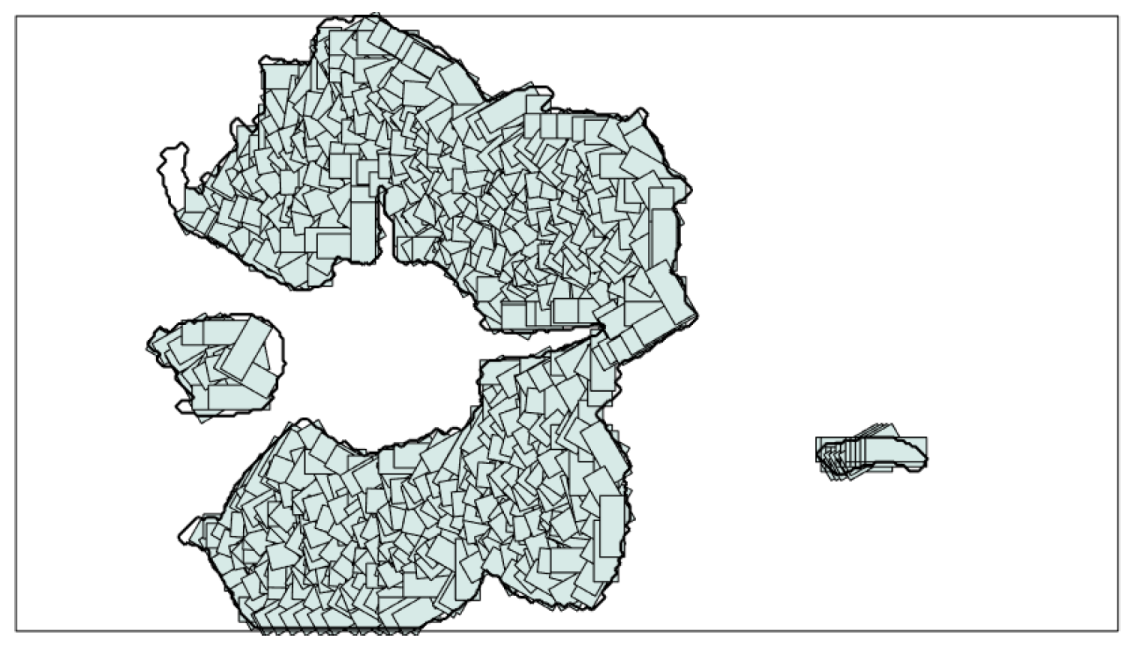
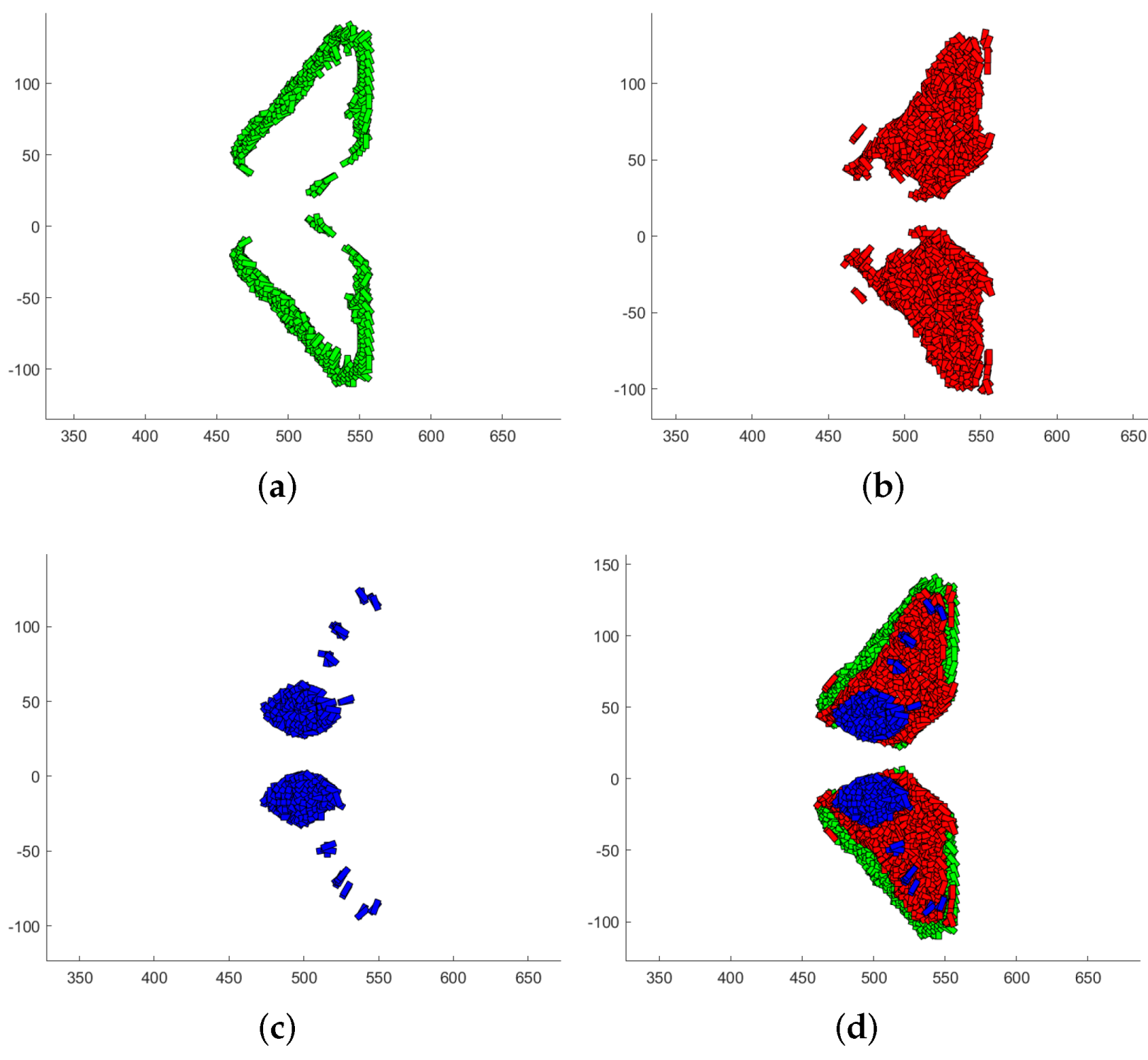
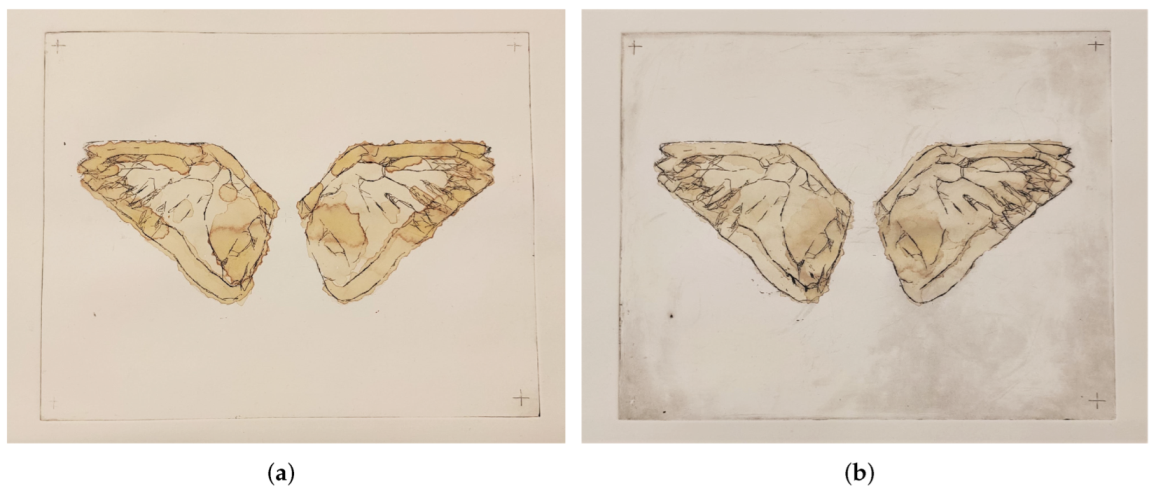
4.2. “Wings”
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Gomez Cubero, C.; Pekarik, M.; Rizzo, V.; Jochum, E. The Robot is Present: Creative Approaches for Artistic Expression with Robots. Front. Robot. 2021, 8, 1–19. [Google Scholar] [CrossRef] [PubMed]
- Leymarie, F.F. Art. Machines. Intelligence. Enjeux Numer. 2021, 13, 82–102. [Google Scholar]
- Scalera, L.; Seriani, S.; Gasparetto, A.; Gallina, P. Non-photorealistic rendering techniques for artistic robotic painting. Robotics 2019, 8, 10. [Google Scholar] [CrossRef] [Green Version]
- Karimov, A.; Kopets, E.; Kolev, G.; Leonov, S.; Scalera, L.; Butusov, D. Image Preprocessing for Artistic Robotic Painting. Inventions 2021, 6, 19. [Google Scholar] [CrossRef]
- Deussen, O.; Lindemeier, T.; Pirk, S.; Tautzenberger, M. Feedback-guided stroke placement for a painting machine. In Proceedings of the Eighth Annual Symposium on Computational Aesthetics in Graphics, Visualization, and Imaging; Eurographics Association: Geneve, Switzerland, 2012; pp. 25–33. [Google Scholar]
- Tresset, P.; Leymarie, F.F. Portrait drawing by Paul the robot. Comput. Graph. 2013, 37, 348–363. [Google Scholar] [CrossRef]
- Berio, D.; Calinon, S.; Leymarie, F.F. Learning dynamic graffiti strokes with a compliant robot. In Proceedings of the Intelligent Robots and Systems (IROS), 2016 IEEE/RSJ International Conference, Daejeon, Korea, 9–14 October 2016; pp. 3981–3986. [Google Scholar]
- Karimov, A.I.; Kopets, E.E.; Rybin, V.G.; Leonov, S.V.; Voroshilova, A.I.; Butusov, D.N. Advanced tone rendition technique for a painting robot. Robot. Auton. Syst. 2019, 115, 17–27. [Google Scholar] [CrossRef]
- Scalera, L.; Seriani, S.; Gasparetto, A.; Gallina, P. Watercolor robotic painting: A novel automatic system for artistic rendering. J. Intell. Robot. Syst. 2019, 95, 871–886. [Google Scholar] [CrossRef]
- Igno-Rosario, O.; Hernandez-Aguilar, C.; Cruz-Orea, A.; Dominguez-Pacheco, A. Interactive system for painting artworks by regions using a robot. Robot. Auton. Syst. 2019, 121, 103263. [Google Scholar] [CrossRef]
- Bidgoli, A.; De Guevara, M.L.; Hsiung, C.; Oh, J.; Kang, E. Artistic Style in Robotic Painting; a Machine Learning Approach to Learning Brushstroke from Human Artists. In Proceedings of the 2020 29th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), Naples, Italy, 31 August–4 September 2020; pp. 412–418. [Google Scholar]
- Gao, F.; Zhu, J.; Yu, Z.; Li, P.; Wang, T. Making robots draw a vivid portrait in two minutes. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 25–29 October 2020; pp. 9585–9591. [Google Scholar]
- Chen, G.; Sheng, W.; Li, Y.; Ou, Y.; Gu, Y. Humanoid Robot Portrait Drawing Based on Deep Learning Techniques and Efficient Path Planning. Arab. J. Sci. Eng. 2021, 1–12. [Google Scholar] [CrossRef]
- Adamik, M.; Goga, J.; Pavlovicova, J.; Babinec, A.; Sekaj, I. Fast robotic pencil drawing based on image evolution by means of genetic algorithm. Robot. Auton. Syst. 2022, 148, 103912. [Google Scholar] [CrossRef]
- Wang, T.; Toh, W.Q.; Zhang, H.; Sui, X.; Li, S.; Liu, Y.; Jing, W. RoboCoDraw: Robotic Avatar Drawing with GAN-based Style Transfer and Time-efficient Path Optimization. Proc. AAAI Conf. Artif. Intell. 2020, 34, 10402–10409. [Google Scholar] [CrossRef]
- Song, D.; Lee, T.; Kim, Y.J.; Sohn, S.; Kim, Y.J. Artistic Pen Drawing on an Arbitrary Surface using an Impedance-controlled Robot. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018. [Google Scholar]
- Song, D.; Kim, Y.J. Distortion-free robotic surface-drawing using conformal mapping. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 627–633. [Google Scholar]
- Liu, R.; Wan, W.; Koyama, K.; Harada, K. Robust Robotic 3-D Drawing Using Closed-Loop Planning and Online Picked Pens. IEEE Trans. Robot. 2021. [Google Scholar] [CrossRef]
- Scalera, L.; Mazzon, E.; Gallina, P.; Gasparetto, A. Airbrush Robotic Painting System: Experimental Validation of a Colour Spray Model. In International Conference on Robotics in Alpe-Adria Danube Region; Springer: Berlin/Heidelberg, Germany, 2017; pp. 549–556. [Google Scholar]
- Vempati, A.S.; Siegwart, R.; Nieto, J. A Data-driven Planning Framework for Robotic Texture Painting on 3D Surfaces. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 9528–9534. [Google Scholar]
- Santos, M.; Notomista, G.; Mayya, S.; Egerstedt, M. Interactive Multi-Robot Painting Through Colored Motion Trails. Front. Robot. 2020, 7, 143. [Google Scholar] [CrossRef] [PubMed]
- Beltramello, A.; Scalera, L.; Seriani, S.; Gallina, P. Artistic Robotic Painting Using the Palette Knife Technique. Robotics 2020, 9, 15. [Google Scholar] [CrossRef] [Green Version]
- Huang, Y.; Tsang, S.C.; Wong, H.T.T.; Lam, M.L. Computational light painting and kinetic photography. In Proceedings of the Joint Symposium on Computational Aesthetics and Sketch-Based Interfaces and Modeling and Non-Photorealistic Animation and Rendering, Victoria, BC, Canada, 17–19 August 2018; pp. 1–9. [Google Scholar]
- Ren, K.; Kry, P.G. Single stroke aerial robot light painting. In Proceedings of the 8th ACM/Eurographics Expressive Symposium on Computational Aesthetics and Sketch Based Interfaces and Modeling and Non-Photorealistic Animation and Rendering, Genoa, Italy, 5–6 May 2019; pp. 61–67. [Google Scholar]
- Ma, Z.; Duenser, S.; Schumacher, C.; Rust, R.; Baecher, M.; Gramazio, F.; Kohler, M.; Coros, S. Stylized Robotic Clay Sculpting. Comput. Graph. 2021, 98, 150–1664. [Google Scholar] [CrossRef]
- Zhuo, F. Human-machine Co-creation on Artistic Paintings. In Proceedings of the 2021 IEEE 1st International Conference on Digital Twins and Parallel Intelligence (DTPI), Beijing, China, 15 July–15 August 2021; pp. 316–319. [Google Scholar]
- Guo, C.; Bai, T.; Lu, Y.; Lin, Y.; Xiong, G.; Wang, X.; Wang, F.Y. Skywork-daVinci: A novel CPSS-based painting support system. In Proceedings of the 2020 IEEE 16th International Conference on Automation Science and Engineering (CASE), Hong Kong, China, 20–21 August 2020; pp. 673–678. [Google Scholar]
- Quintero, C.P.; Dehghan, M.; Ramirez, O.; Ang, M.H.; Jagersand, M. Flexible virtual fixture interface for path specification in tele-manipulation. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 5363–5368. [Google Scholar]
- Chen, L.; Swikir, A.; Haddadin, S. Drawing Elon Musk: A Robot Avatar for Remote Manipulation. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September–1 October 2021; pp. 4244–4251. [Google Scholar]
- Dziemian, S.; Abbott, W.W.; Faisal, A.A. Gaze-based teleprosthetic enables intuitive continuous control of complex robot arm use: Writing & drawing. In Proceedings of the 2016 6th IEEE International Conference on Biomedical Robotics and Biomechatronics (BioRob), Singapore, 26–29 June 2016; pp. 1277–1282. [Google Scholar]
- Scalera, L.; Maset, E.; Seriani, S.; Gasparetto, A.; Gallina, P. Performance evaluation of a robotic architecture for drawing with eyes. Int. J. Mech. Control. 2021, 22, 53–60. [Google Scholar]
- Art Institute Chicago. Henry Fletcher. Available online: https://www.artic.edu/artists/34495/henry-fletcher (accessed on 24 December 2021).
- The Metropolitan Museum of Art. Etching. Available online: https://www.metmuseum.org/about-the-met/collection-areas/drawings-and-prints/materials-and-techniques/printmaking/etching (accessed on 24 December 2021).
- Van den Boomgaard, R.; Van Balen, R. Methods for fast morphological image transforms using bitmapped binary images. Cvgip Graph. Model. Image Process. 1992, 54, 252–258. [Google Scholar] [CrossRef]
- Mayer, R. The Artist’s Handbook of Materials and Techniques; Viking: New York, NY, USA, 1991. [Google Scholar]
- Curtis, C.J.; Anderson, S.E.; Seims, J.E.; Fleischer, K.W.; Salesin, D.H. Computer-generated watercolor. In Proceedings of the 24th Annual Conference on Computer Graphics and Interactive Techniques, Los Angeles, CA, USA, 3–8 August 1997; pp. 421–430. [Google Scholar]
- Lum, E.B.; Ma, K.L. Non-photorealistic rendering using watercolor inspired textures and illumination. In Proceedings of the Ninth Pacific Conference on Computer Graphics and Applications. Pacific Graphics, Tokyo, Japan, 16–18 October 2001; pp. 322–330. [Google Scholar]
- Van Laerhoven, T.; Liesenborgs, J.; Van Reeth, F. Real-time watercolor painting on a distributed paper model. In Proceedings of the Computer Graphics International, Crete, Greece, 16–19 June 2004; pp. 640–643. [Google Scholar]
- KUKA. LBR Iiwa. Available online: https://www.kuka.com/en-us/products/robotics-systems/industrial-robots/lbr-iiwa (accessed on 24 December 2021).
- Uozzart. Colosseo Quadrato, il Capolavoro dell’Eur e il Riferimento al Duce. Available online: https://uozzart.com/2020/06/14/palazzo-della-civilta-italiana-colosseo-quadrato-eur/ (accessed on 24 December 2021).
- Pixabay. Blue Wings. Available online: https://pixabay.com/photos/blue-wings-at-liberty-blue-bird-2471094/ (accessed on 24 December 2021).






Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Scalera, L.; Canever, G.; Seriani, S.; Gasparetto, A.; Gallina, P. Robotic Sponge and Watercolor Painting Based on Image-Processing and Contour-Filling Algorithms. Actuators 2022, 11, 62. https://doi.org/10.3390/act11020062
Scalera L, Canever G, Seriani S, Gasparetto A, Gallina P. Robotic Sponge and Watercolor Painting Based on Image-Processing and Contour-Filling Algorithms. Actuators. 2022; 11(2):62. https://doi.org/10.3390/act11020062
Chicago/Turabian StyleScalera, Lorenzo, Giona Canever, Stefano Seriani, Alessandro Gasparetto, and Paolo Gallina. 2022. "Robotic Sponge and Watercolor Painting Based on Image-Processing and Contour-Filling Algorithms" Actuators 11, no. 2: 62. https://doi.org/10.3390/act11020062
APA StyleScalera, L., Canever, G., Seriani, S., Gasparetto, A., & Gallina, P. (2022). Robotic Sponge and Watercolor Painting Based on Image-Processing and Contour-Filling Algorithms. Actuators, 11(2), 62. https://doi.org/10.3390/act11020062