
Dynamic Control of a Novel Planar Cable-Driven Parallel Robot with a Large Wrench Feasible Workspace
 , ,
, ,  ,
,  , and
, and
Abstract
1. Introduction
- (a)
- To present the dynamics model of the robot, which includes the dynamics model of the passive carriages. The addition of these carriages makes the system have five degrees-of-freedom and four actuators (underconstrained), but only three of them shall be controlled (fully constrained).
- (b)
- (c)
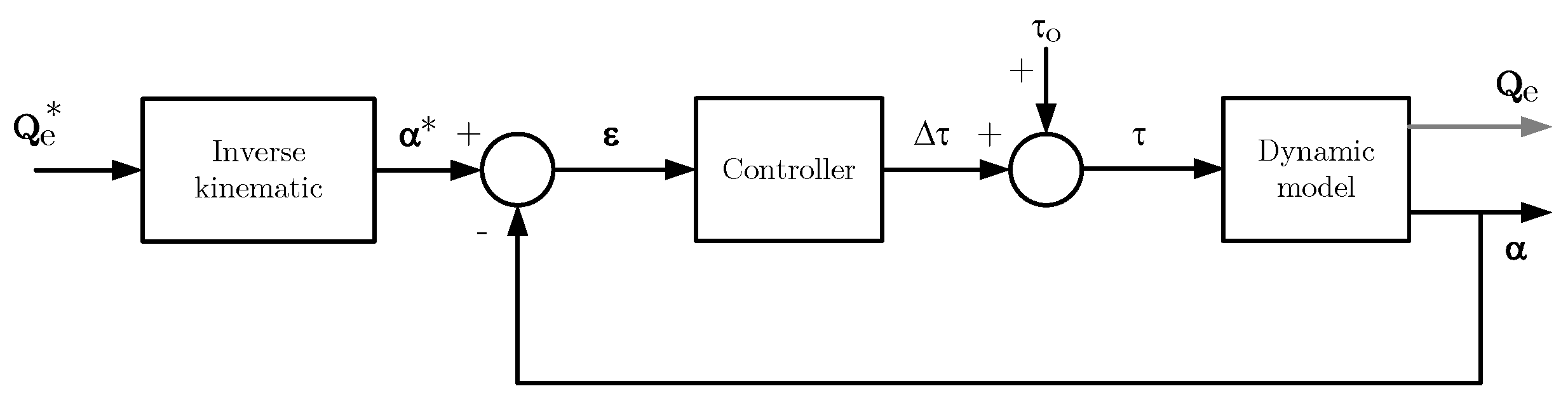
- To implement a dynamic control that tackles the problems of positive tension and vibrations’ rejection, owing to the low stiffness that the robot presents in the horizontal axis. In this sense, a novel control approach based on the addition of a control signal offset together with conventional PID controllers are also presented.
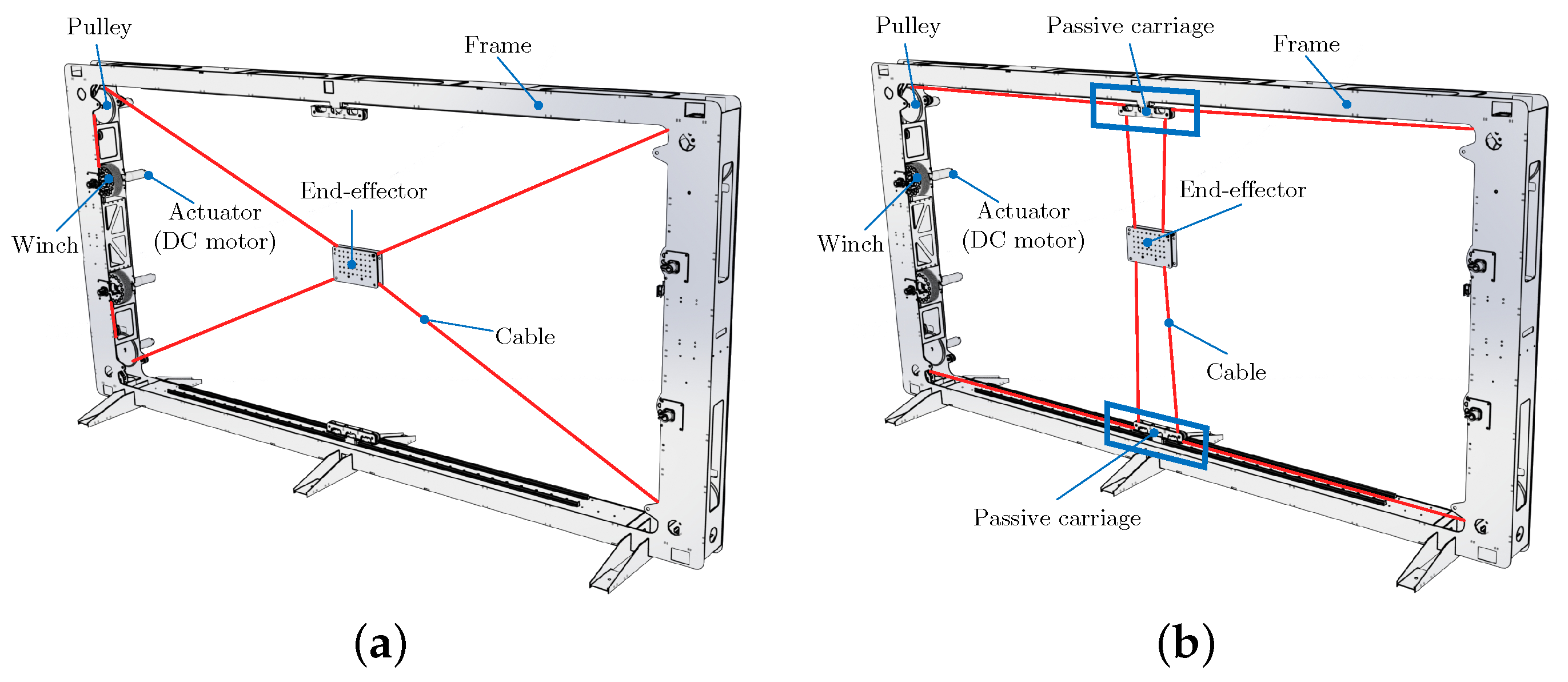
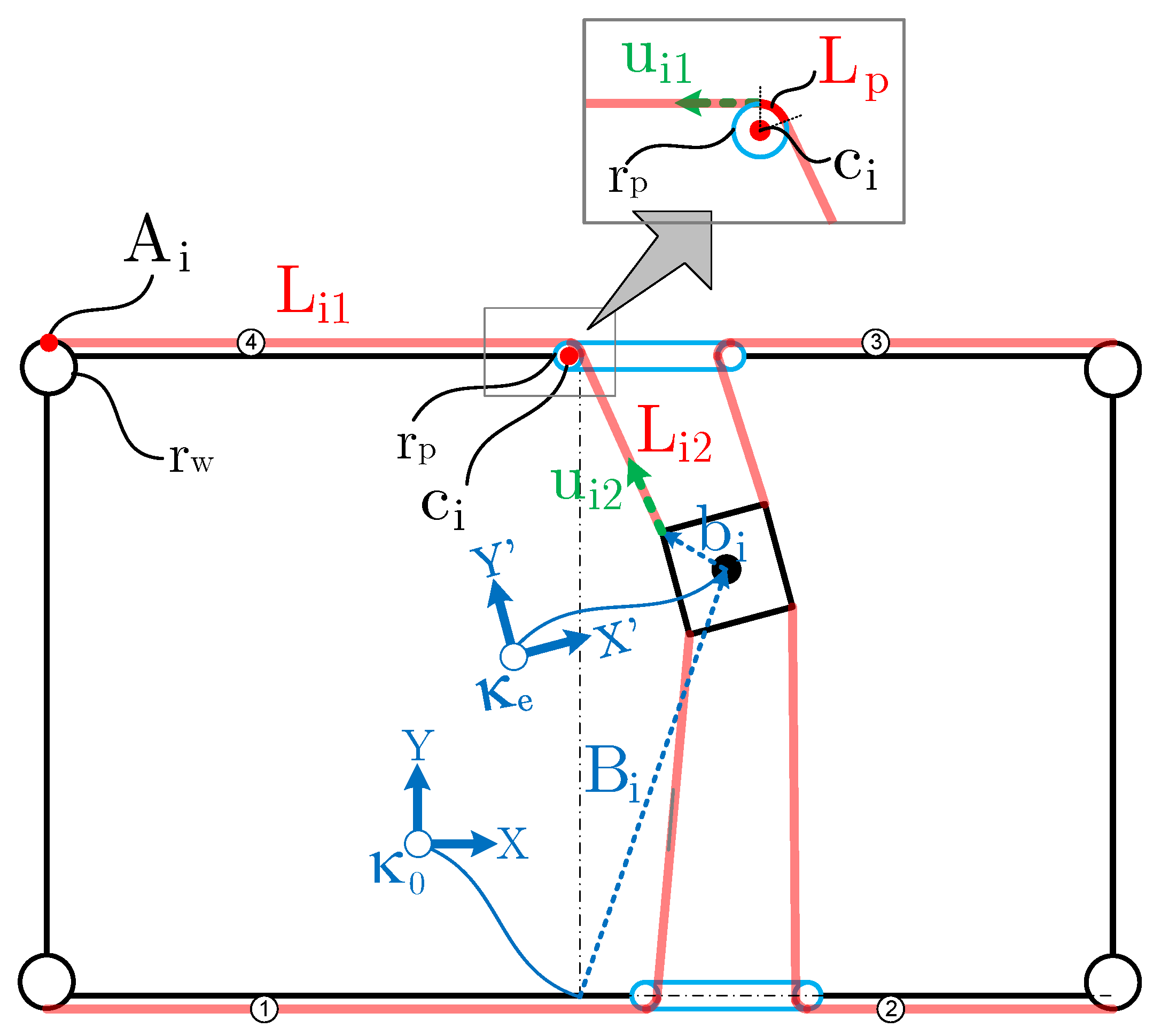
2. System Description
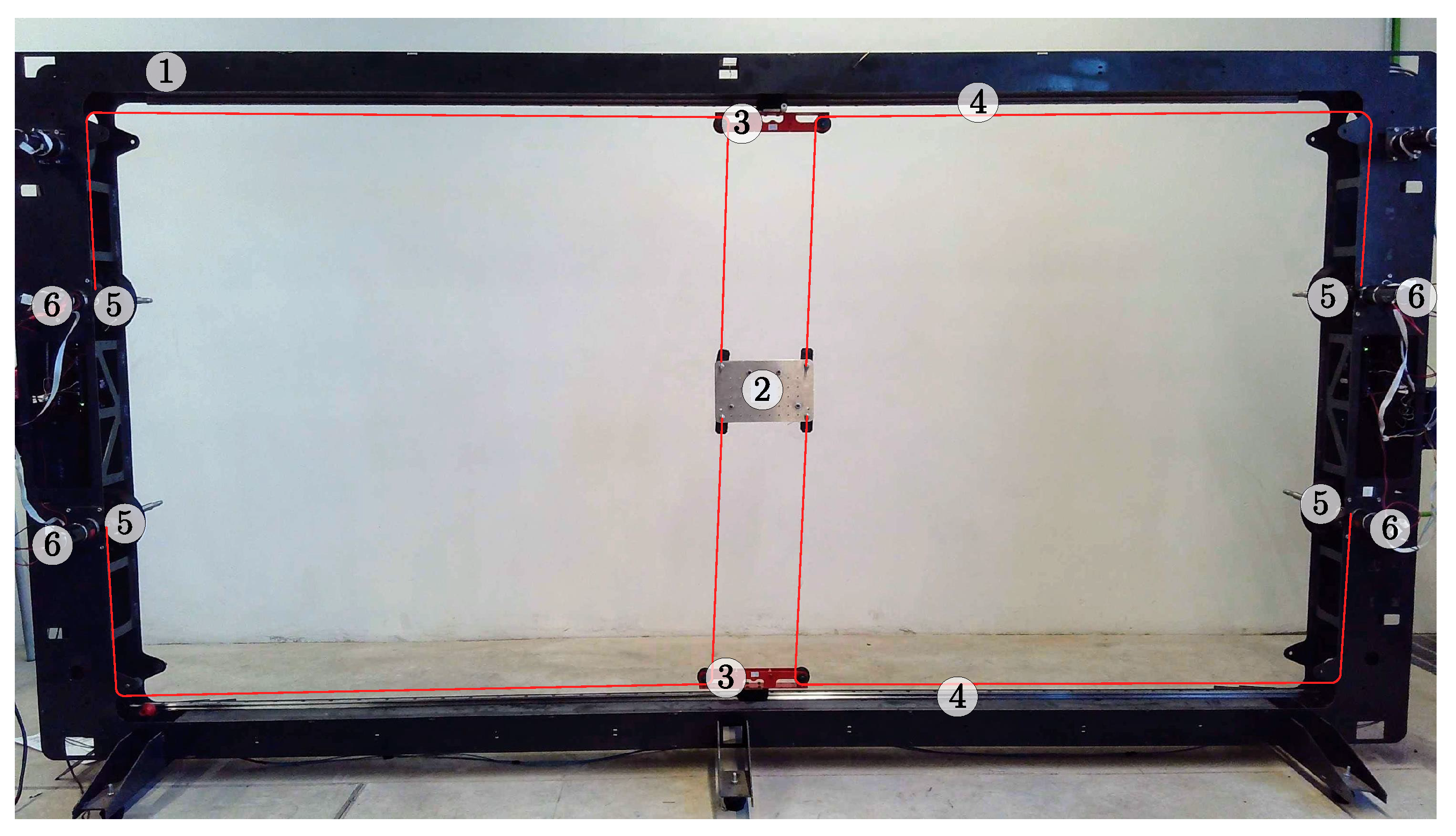
2.1. Overall Description
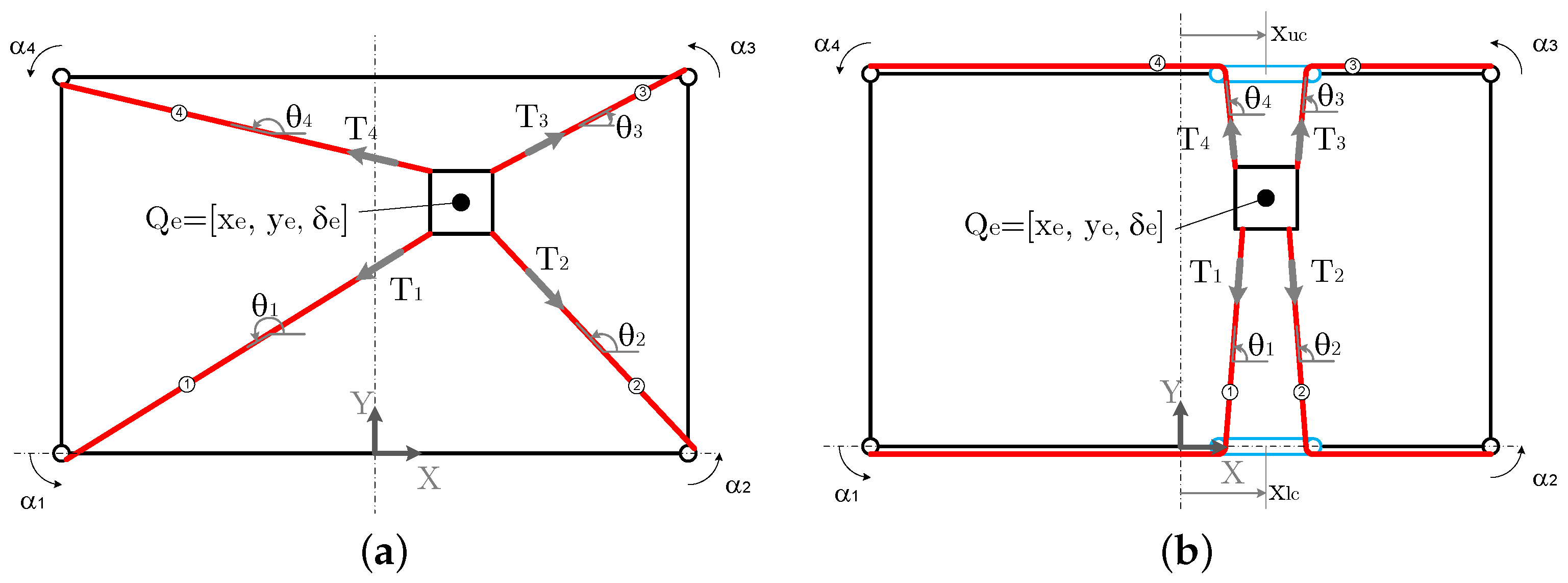
2.2. Nomenclature
- The end-effector pose is defined as .
- The tension of the cables is for to 4.
- The angle of the cables is for to 4.
- The angle of the motors is defined as for to 4.
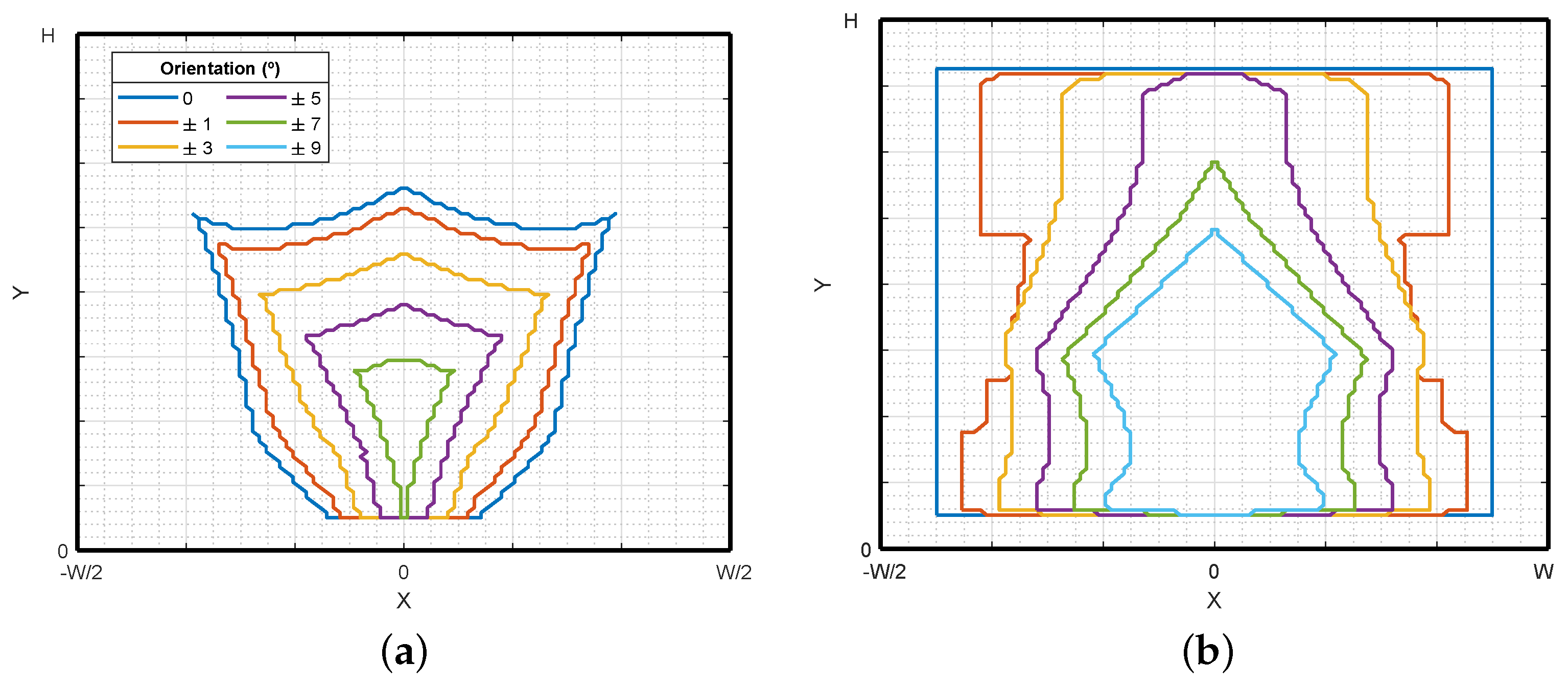
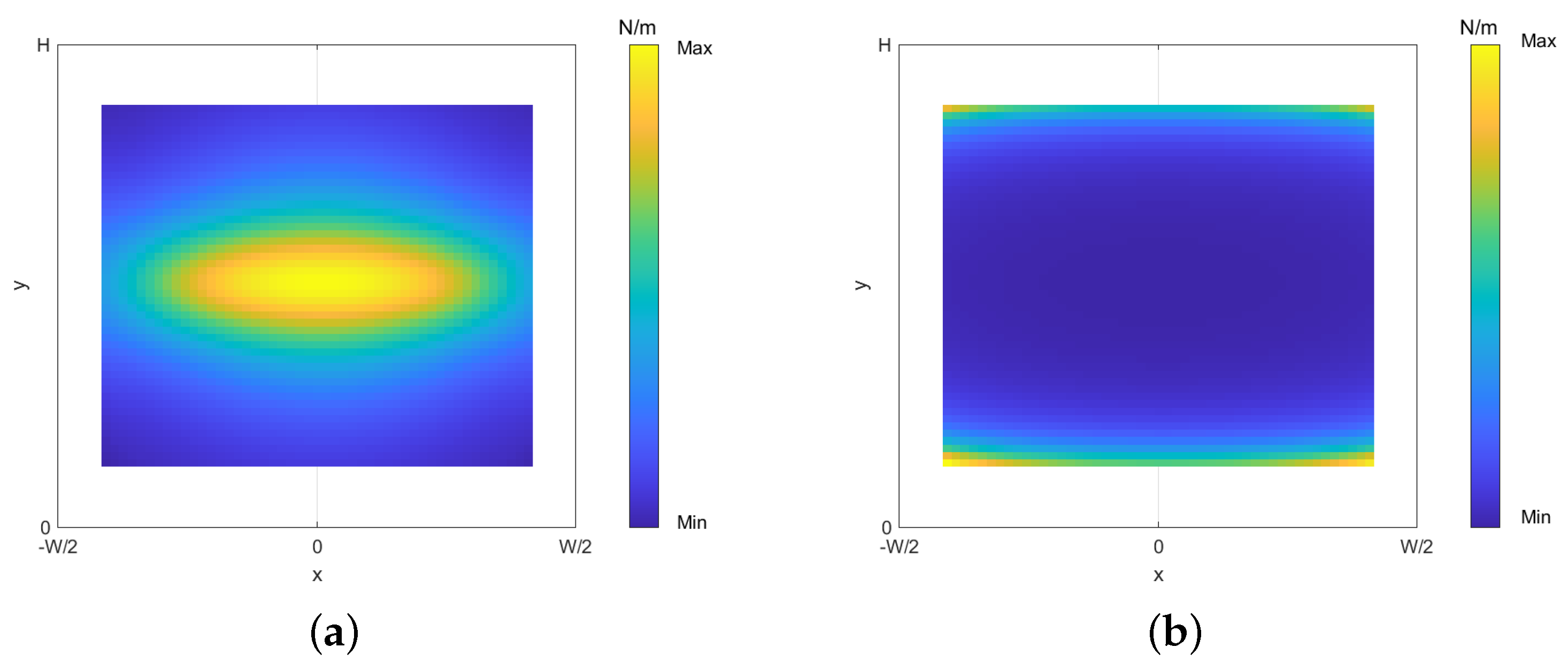
2.3. Workspace and Stiffness Comparison
3. Mathematical Model
3.1. Kinematic Model
3.2. Dynamic Model
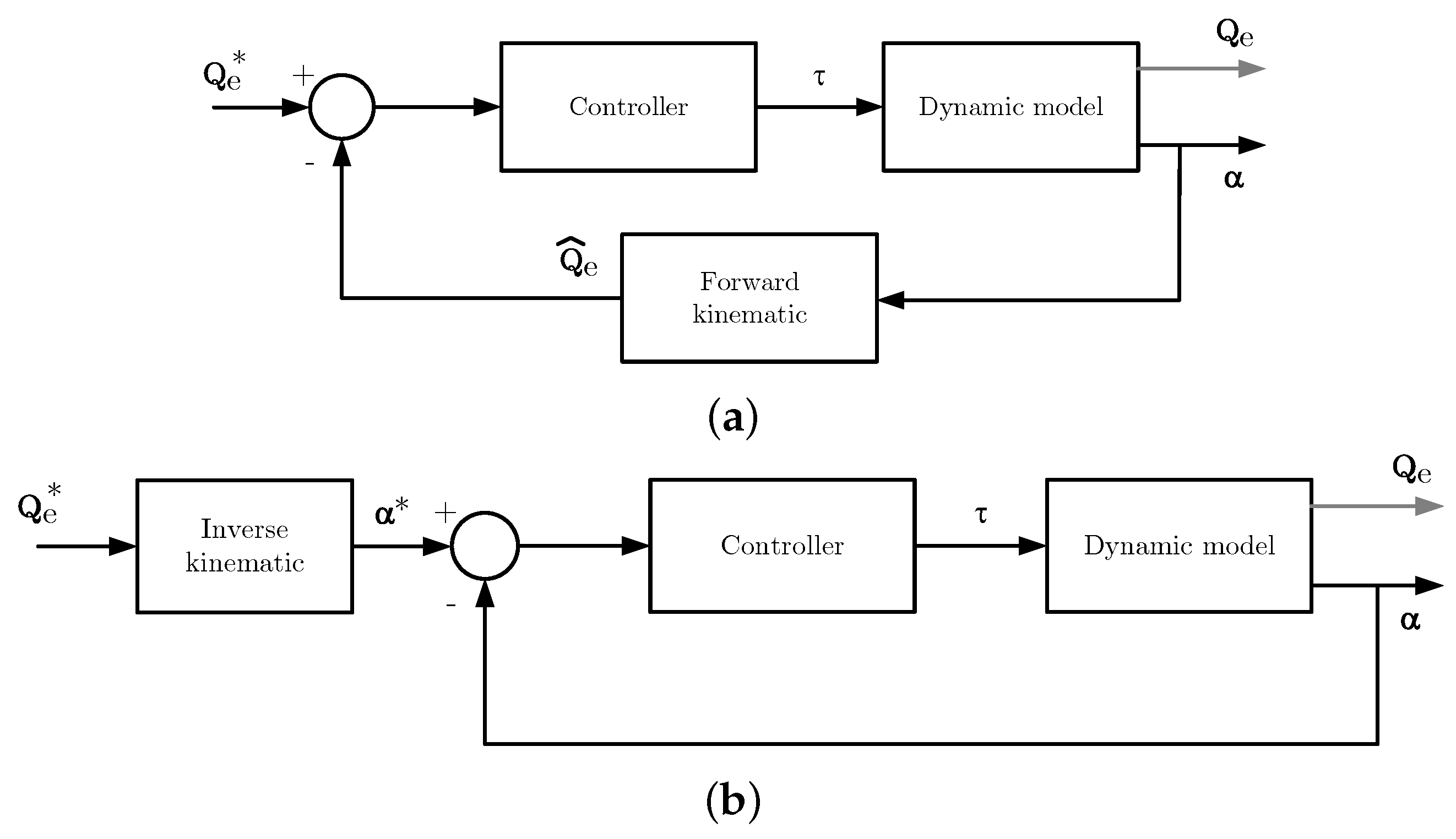
4. Control Approach
4.1. Control Scheme
4.2. Trajectory Generation
- (a)
- Generation of the desired end-effector trajectory .
- (b)
- For a given , the tension value of one cable is fixed to ; in our case, was arbitrary set.
- (c)
- For the established values of and , the static equilibrium problem is solved to determine and . To solve this problem, the Levenberg–Marquardt algorithm is applied [47].
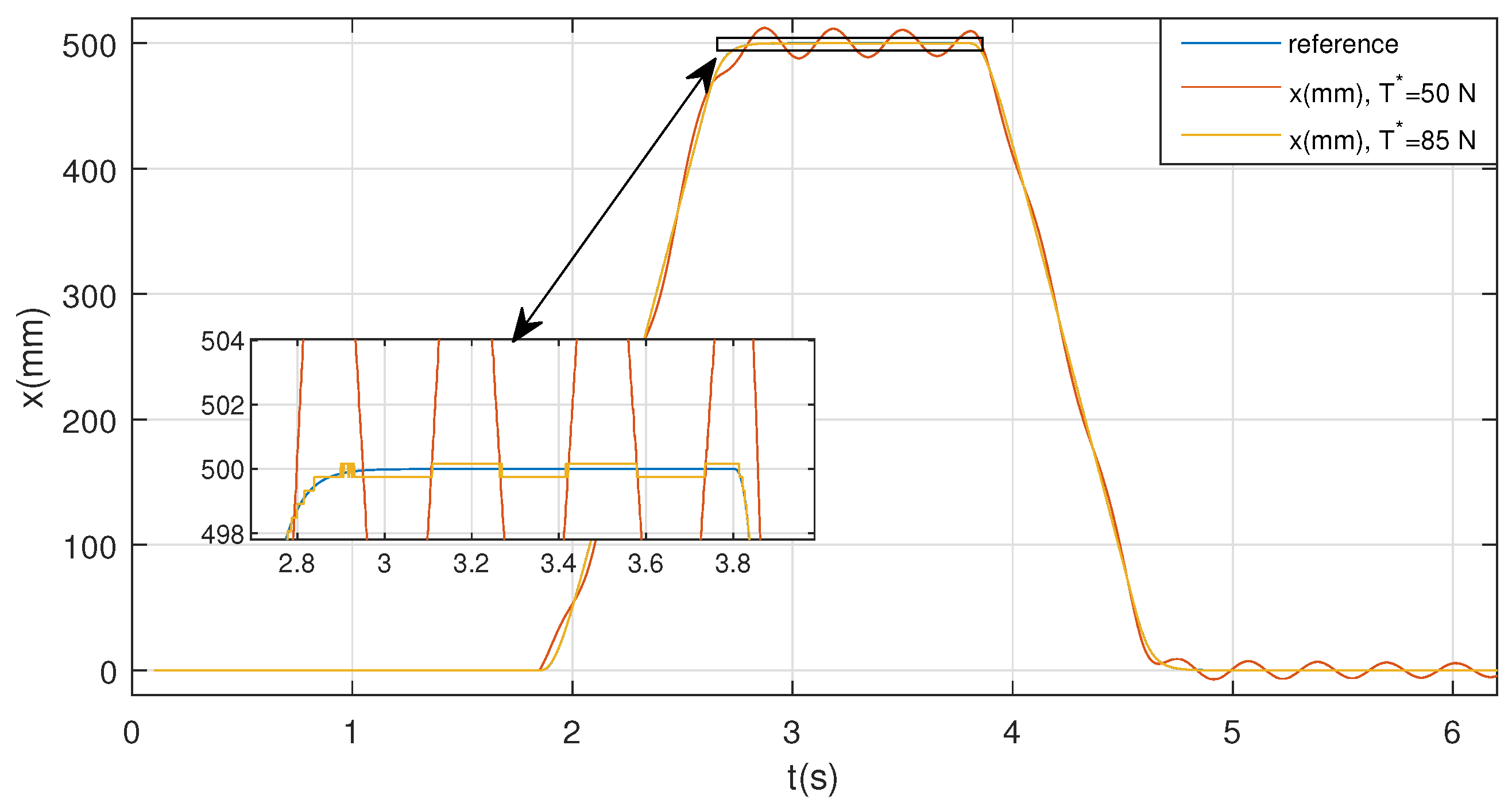
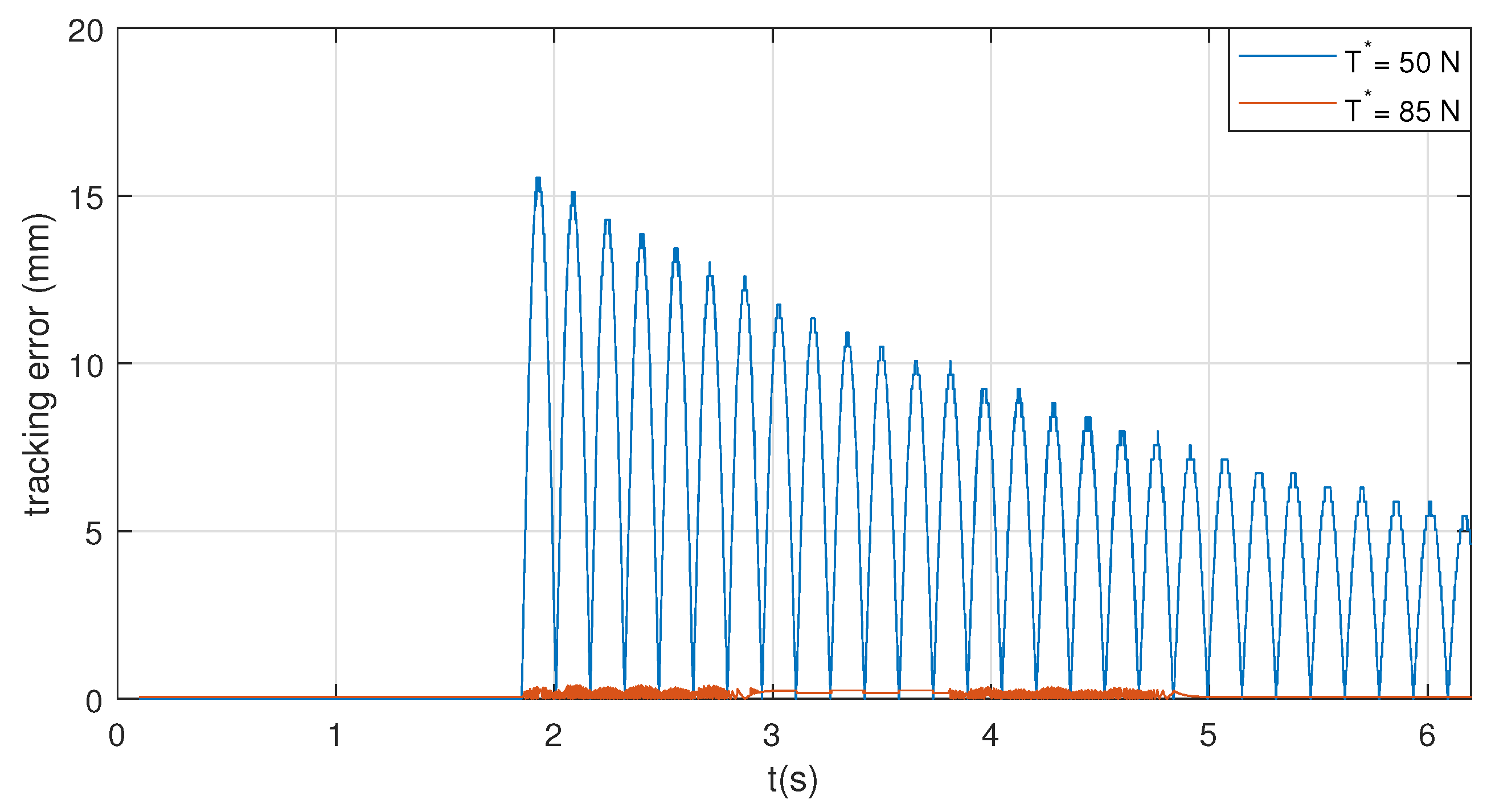
4.3. Positive Tension Problem and Vibration Rejection
4.4. Controller Tuning
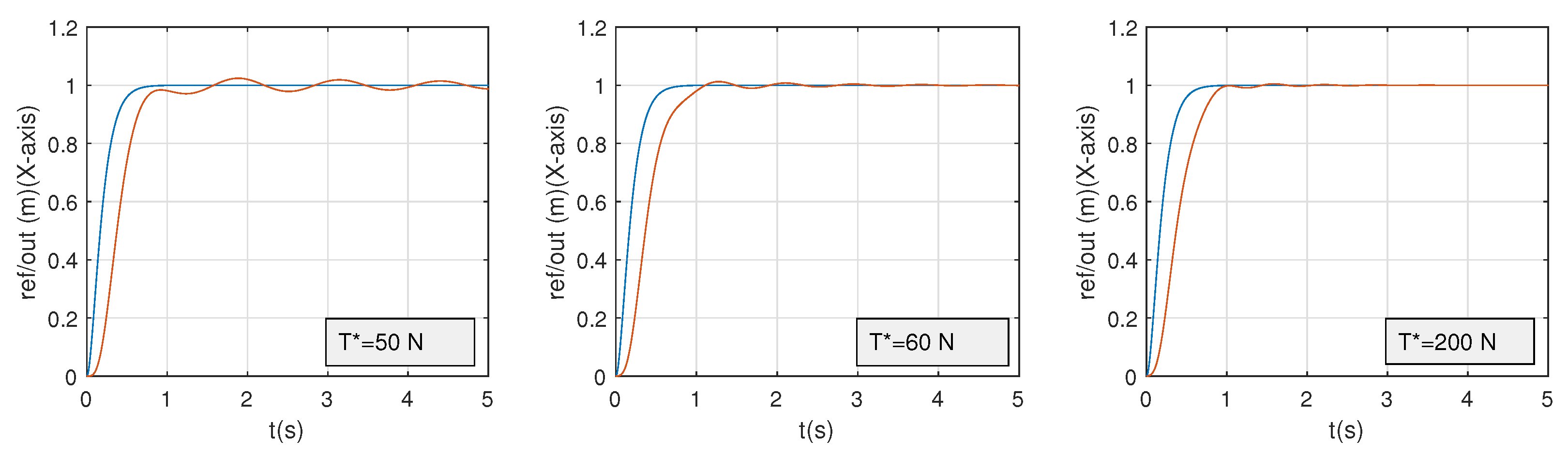
5. Simulation Results
5.1. Preliminaries
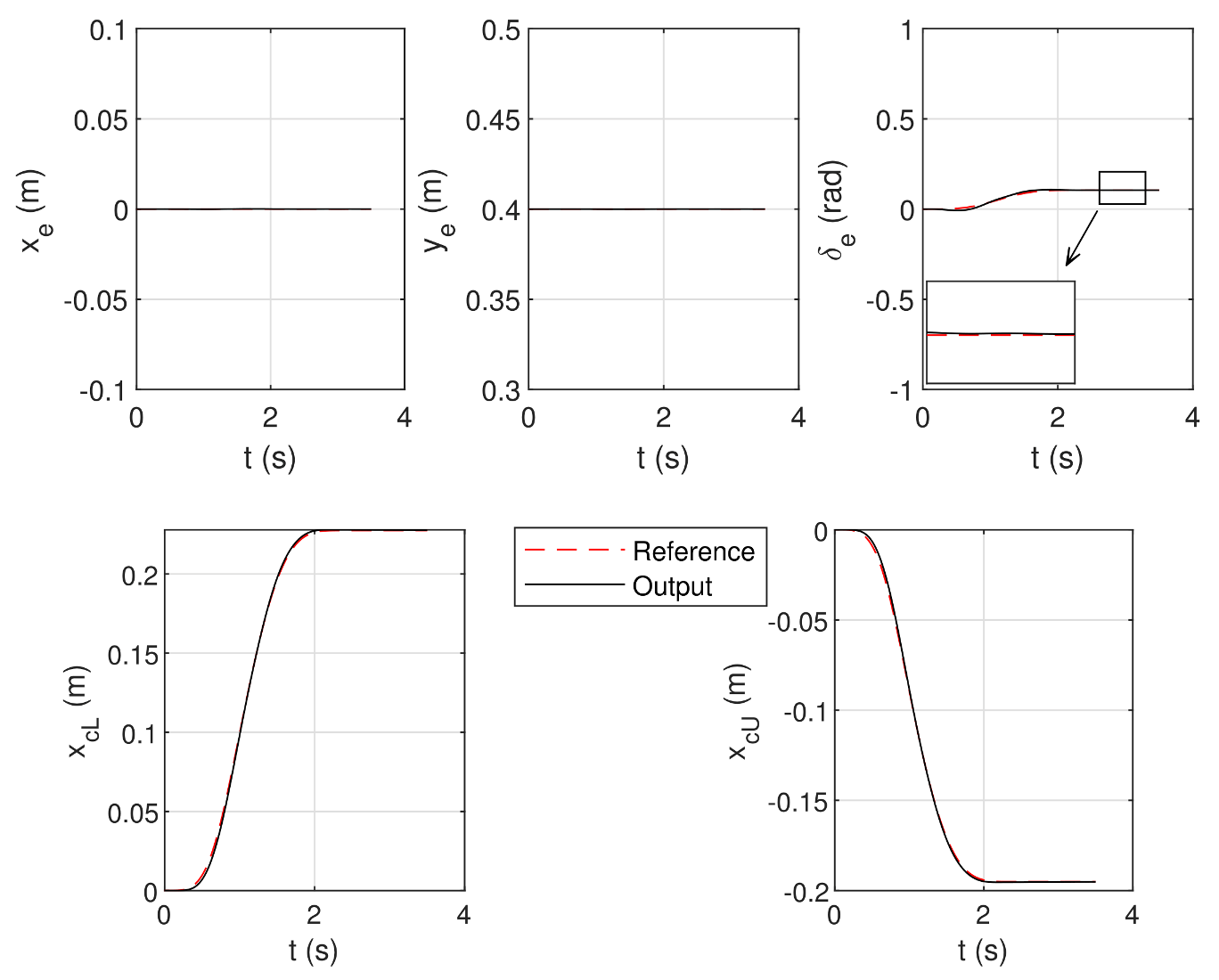
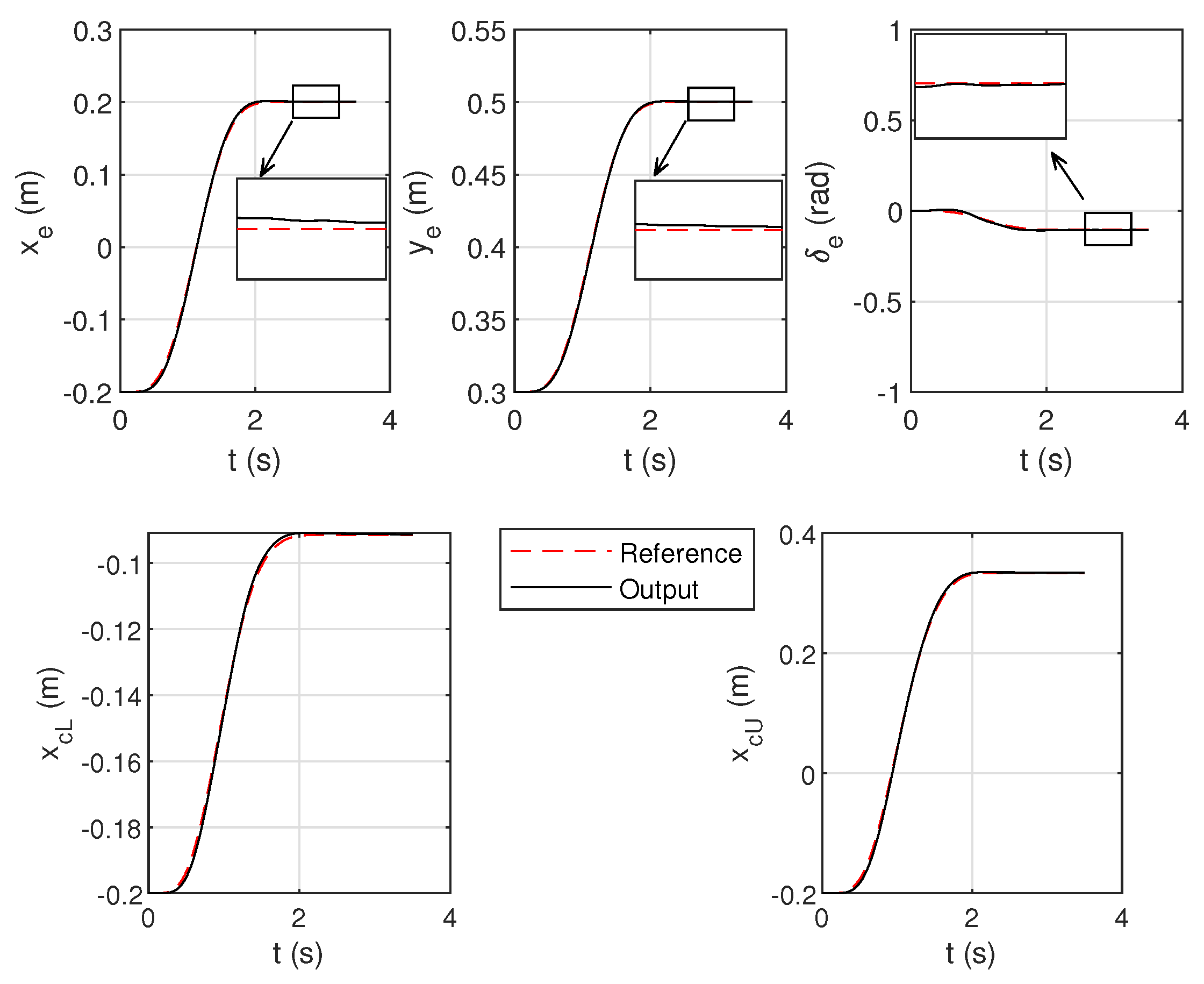
5.2. Control Approach Validation
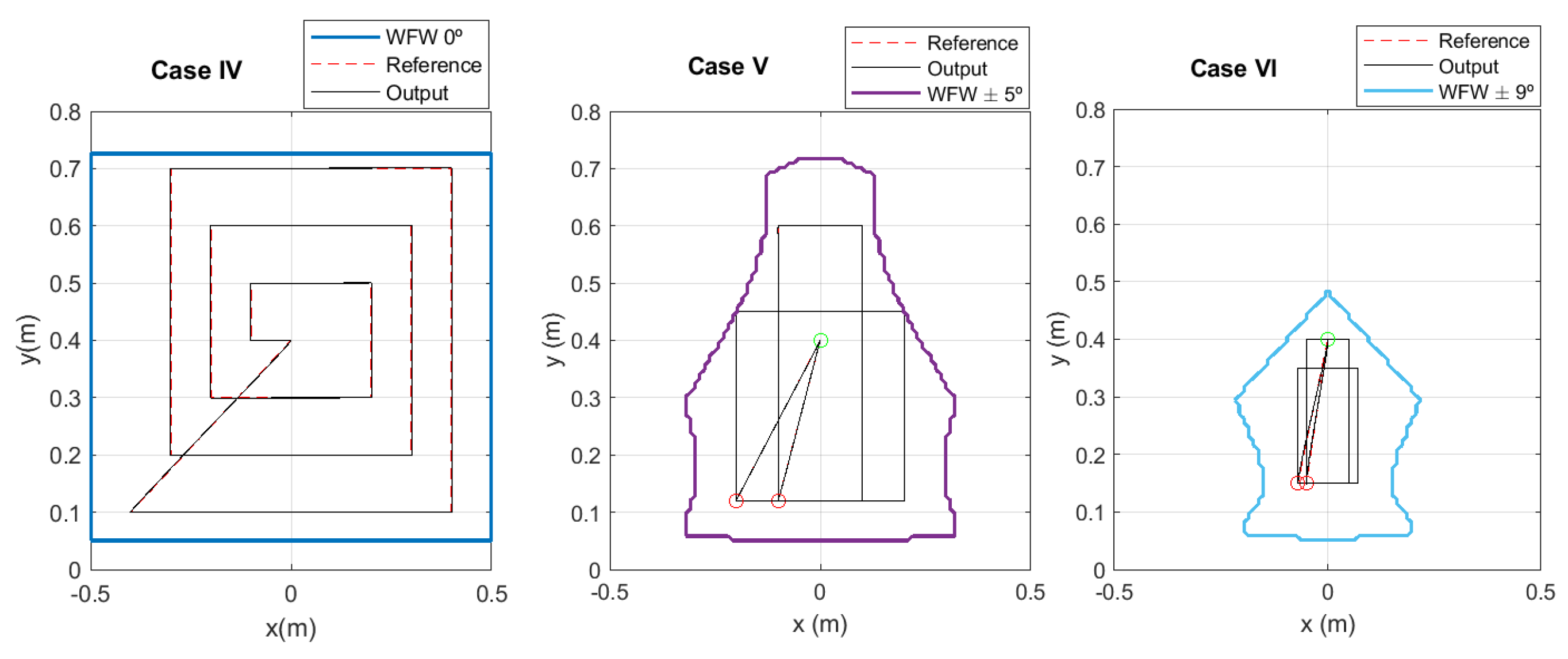
5.3. WFW Increase Validation
6. Experimental Results
6.1. Preliminaries
6.2. Trajectory Tracking
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Merlet, J.P. Parallel Robots; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2005; Volume 128. [Google Scholar]
- Bosscher, P.; Williams, R.L.; Tummino, M. A concept for rapidly-deployable cable robot search and rescue systems. In Proceedings of the International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Long Beach, CA, USA, 24–28 September 2005; Volume 47446, pp. 589–598. [Google Scholar]
- Tadokoro, S.; Verhoeven, R.; Hiller, M.; Takamori, T. A portable parallel manipulator for search and rescue at large-scale urban earthquakes and an identification algorithm for the installation in unstructured environments. In Proceedings of the 1999 IEEE/RSJ International Conference on Intelligent Robots and Systems, Human and Environment Friendly Robots with High Intelligence and Emotional Quotients (Cat. No. 99CH36289), Kyongju, Republic of Korea, 17–21 October 1999; Volume 2, pp. 1222–1227. [Google Scholar]
- Ottaviano, E.; Ceccarelli, M.; De Ciantis, M. A 4–4 cable-based parallel manipulator for an application in hospital environment. In Proceedings of the 2007 Mediterranean Conference on Control & Automation, Athens, Greece, 27–29 June 2007; pp. 1–6. [Google Scholar]
- Gallina, P.; Rosati, G. Manipulability of a planar wire driven haptic device. Mech. Mach. Theory 2002, 37, 215–228. [Google Scholar] [CrossRef]
- Skycam. Available online: http://www.skycam.tv/2022 (accessed on 10 October 2022).
- Gueners, D.; Chanal, H.; Bouzgarrou, B.C. Design and implementation of a cable-driven parallel robot for additive manufacturing applications. Mechatronics 2022, 86, 102874. [Google Scholar] [CrossRef]
- Castelli, G.; Ottaviano, E.; Rea, P. A Cartesian Cable-Suspended Robot for improving end-users’ mobility in an urban environment. Robot.-Comput.-Integr. Manuf. 2014, 30, 335–343. [Google Scholar] [CrossRef]
- Kawamura, S.; Choe, W.; Tanaka, S.; Kino, H. Development of an ultrahigh speed robot FALCON using parallel wire drive systems. J. Robot. Soc. Jpn. 1997, 15, 82–89. [Google Scholar] [CrossRef]
- Gonzalez-Rodriguez, A.; Castillo-Garcia, F.; Ottaviano, E.; Rea, P.; Gonzalez-Rodriguez, A. On the effects of the design of cable-Driven robots on kinematics and dynamics models accuracy. Mechatronics 2017, 43, 18–27. [Google Scholar] [CrossRef]
- Albus, J.; Bostelman, R.; Dagalakis, N. The NIST robocrane. J. Robot. Syst. 1993, 10, 709–724. [Google Scholar] [CrossRef]
- Duan, B.; Qiu, Y.; Zhang, F.; Zi, B. Analysis and experiment of the feed cable-suspended structure for super antenna. In Proceedings of the 2008 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Xi’an, China, 2–5 July 2008; pp. 329–334. [Google Scholar]
- Tho, T.P.; Thinh, N.T. An Overview of Cable-Driven Parallel Robots: Workspace, Tension Distribution, and Cable Sagging. Math. Probl. Eng. 2022, 2022, 2199748. [Google Scholar] [CrossRef]
- Abbasnejad, G.; Carricato, M. Direct geometrico-static problem of underconstrained cable-driven parallel robots with n cables. IEEE Trans. Robot. 2015, 31, 468–478. [Google Scholar] [CrossRef]
- Castelli, G.; Ottaviano, E.; González, A. Analysis and simulation of a new Cartesian cable-suspended robot. Proc. Inst. Mech. Eng. Part J. Mech. Eng. Sci. 2010, 224, 1717–1726. [Google Scholar] [CrossRef]
- Idà, E.; Bruckmann, T.; Carricato, M. Rest-to-rest trajectory planning for underactuated cable-driven parallel robots. IEEE Trans. Robot. 2019, 35, 1338–1351. [Google Scholar] [CrossRef]
- Gouttefarde, M.; Gosselin, C.M. Analysis of the wrench-closure workspace of planar parallel cable-driven mechanisms. IEEE Trans. Robot. 2006, 22, 434–445. [Google Scholar] [CrossRef]
- Gouttefarde, M.; Daney, D.; Merlet, J.P. Interval-analysis-based determination of the wrench-feasible workspace of parallel cable-driven robots. IEEE Trans. Robot. 2010, 27, 1–13. [Google Scholar] [CrossRef]
- Kozak, K.; Zhou, Q.; Wang, J. Static analysis of cable-driven manipulators with non-negligible cable mass. IEEE Trans. Robot. 2006, 22, 425–433. [Google Scholar] [CrossRef]
- Riehl, N.; Gouttefarde, M.; Krut, S.; Baradat, C.; Pierrot, F. Effects of non-negligible cable mass on the static behavior of large workspace cable-driven parallel mechanisms. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 2193–2198. [Google Scholar]
- Merlet, J.P. The kinematics of cable-driven parallel robots with sagging cables: Preliminary results. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 1593–1598. [Google Scholar]
- Ottaviano, E.; Arena, A.; Gattulli, V. Geometrically exact three-dimensional modeling of cable-driven parallel manipulators for end-effector positioning. Mech. Mach. Theory 2021, 155, 104102. [Google Scholar] [CrossRef]
- Du, J.; Bao, H.; Cui, C.; Yang, D. Dynamic analysis of cable-driven parallel manipulators with time-varying cable lengths. Finite Elem. Anal. Des. 2012, 48, 1392–1399. [Google Scholar] [CrossRef]
- Kawamura, S.; Kino, H.; Won, C. High-speed manipulation by using parallel wire-driven robots. Robotica 2000, 18, 13–21. [Google Scholar] [CrossRef]
- Zi, B.; Duan, B.; Du, J.; Bao, H. Dynamic modeling and active control of a cable-suspended parallel robot. Mechatronics 2008, 18, 1–12. [Google Scholar] [CrossRef]
- Bruckmann, T.; Sturm, C.; Lalo, W. Wire robot suspension systems for wind tunnels. In Wind Tunnels and Experimental Fluid Dynamics Research; IntechOpen: London, UK, 2010; pp. 29–50. [Google Scholar]
- Oh, S.R.; Agrawal, S. A reference governor-based controller for a cable robot under input constraints. IEEE Trans. Control. Syst. Technol. 2005, 13, 639–645. [Google Scholar] [CrossRef]
- Ma, O.; Diao, X. Dynamics analysis of a cable-driven parallel manipulator for hardware-in-the-loop dynamic simulation. In Proceedings of the 2005 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Monterey, CA, USA, 24–28 July 2005; pp. 837–842. [Google Scholar]
- Du, J.; Ding, W.; Bao, H. Cable vibration analysis for large workspace cable-driven parallel manipulators. In Cable-Driven Parallel Robots; Springer: Berlin/Heidelberg, Germany, 2013; pp. 437–449. [Google Scholar]
- Diao, X.; Ma, O. Vibration analysis of cable-driven parallel manipulators. Multibody Syst. Dyn. 2009, 21, 347–360. [Google Scholar] [CrossRef]
- Behzadipour, S.; Khajepour, A. Stiffness of cable-based parallel manipulators with application to stability analysis. J. Mech. Des. 2006, 128, 303–310. [Google Scholar] [CrossRef]
- Tempel, P.; Miermeister, P.; Lechler, A.; Pott, A. Modelling of kinematics and dynamics of the IPAnema 3 cable robot for simulative analysis. Appl. Mech. Mater. 2015, 794, 419–426. [Google Scholar] [CrossRef]
- Yuan, H.; Courteille, E.; Deblaise, D. Static and dynamic stiffness analyses of cable-driven parallel robots with non-negligible cable mass and elasticity. Mech. Mach. Theory 2015, 85, 64–81. [Google Scholar] [CrossRef]
- Wu, Q.; Takahashi, K.; Nakamura, S. Formulae for frequencies and modes of in-plane vibrations of small-sag inclined cables. J. Sound Vib. 2005, 279, 1155–1169. [Google Scholar] [CrossRef]
- Zhou, X.; Yan, S.; Chu, F. In-plane free vibrations of an inclined taut cable. J. Vib. Acoust. 2011, 133, 031001. [Google Scholar] [CrossRef]
- Du, J.; Cui, C.; Bao, H.; Qiu, Y. Dynamic Analysis of Cable-Driven Parallel Manipulators Using a Variable Length Finite Element. J. Comput. Nonlinear Dyn. 2014, 10, 011013. [Google Scholar] [CrossRef]
- Meunier, G.; Boulet, B.; Nahon, M. Control of an overactuated cable-driven parallel mechanism for a radio telescope application. IEEE Trans. Control Syst. Technol. 2009, 17, 1043–1054. [Google Scholar] [CrossRef]
- Pott, A. Cable-Driven Parallel Robots: Theory and Application; Springer: Cham, Switzerland, 2018. [Google Scholar]
- Martin-Parra, A.; Juarez-Perez, S.; Gonzalez-Rodriguez, A.; Gonzalez-Rodriguez, A.G.; Lopez-Diaz, A.I.; Rubio-Gomez, G. A novel design for fully constrained planar Cable-Driven Parallel Robots to increase their wrench-feasible workspace. Mech. Mach. Theory 2023, 180, 105159. [Google Scholar] [CrossRef]
- Youssef, K.; Otis, M.J.D. Reconfigurable fully constrained cable driven parallel mechanism for avoiding interference between cables. Mech. Mach. Theory 2020, 148, 103781. [Google Scholar] [CrossRef]
- Rushton, M.; Khajepour, A. Planar variable structure cable-driven parallel robots for circumventing obstacles. J. Mech. Robot. 2021, 13, 021011. [Google Scholar] [CrossRef]
- Trevisani, A. Planning of dynamically feasible trajectories for translational, planar, and underconstrained cable-driven robots. J. Syst. Sci. Complex. 2013, 26, 695–717. [Google Scholar] [CrossRef]
- Pott, A. Geometric and Static Foundations. In Cable-Driven Parallel Robots; Springer: Berlin/Heidelberg, Germany, 2018; pp. 45–117. [Google Scholar]
- Moradi, A. Stiffness Analysis of Cable-Driven Parallel Robots; Queen’s University: Kingston, ON, Canada, 2013. [Google Scholar]
- Pott, A. An improved force distribution algorithm for over-constrained cable-driven parallel robots. In Computational Kinematics; Springer: Dordrecht, The Netherlands, 2014; pp. 139–146. [Google Scholar]
- Lieslehto, J. MIMO controller design using SISO controller design methods. IFAC Proc. Vol. 1996, 29, 1152–1156. [Google Scholar] [CrossRef]
- Ranganathan, A. The levenberg-marquardt algorithm. Tutoral LM Algorithm 2004, 11, 101–110. [Google Scholar]
- Ogata, K. Modern Control Engineering; Pearson: Upper Saddle River, NJ, USA, 2010; Volume 5. [Google Scholar]
- Zhang, B.; Shang, W.; Cong, S.; Li, Z. Coordinated dynamic control in the task space for redundantly actuated cable-driven parallel robots. IEEE/ASME Trans. Mechatron. 2020, 26, 2396–2407. [Google Scholar] [CrossRef]
- Yuan, H.; Courteille, E.; Deblaise, D. Force distribution with pose-dependent force boundaries for redundantly actuated cable-driven parallel robots. J. Mech. Robot. 2016, 8, 041004. [Google Scholar] [CrossRef]
- Cui, Z.; Tang, X.; Hou, S.; Sun, H. Research on controllable stiffness of redundant cable-driven parallel robots. IEEE/ASME Trans. Mechatron. 2018, 23, 2390–2401. [Google Scholar] [CrossRef]
- Khosravi, M.A.; Taghirad, H.D. Robust PID control of fully-constrained cable driven parallel robots. Mechatronics 2014, 24, 87–97. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Subsystem | Parameter | Value |
|---|---|---|
| Frame | H | m |
| W | m | |
| Carriages | m | |
| m | ||
| 3 kg | ||
| Ns/m | ||
| Motor/winch set | J | 4.61 × Kgm |
| Nms | ||
| r | m | |
| End-effector | 1 kg | |
| w | m | |
| h | m | |
| Kgm | ||
| Controllers | 40 rad/s | |
| Subsystem | Parameter | Value |
|---|---|---|
| Frame | H | m |
| W | m | |
| Carriages | m | |
| m | ||
| kg | ||
| Ns/m | ||
| m | ||
| Motor/winch set | J | Kgm |
| Nms | ||
| r | m | |
| End-effector | kg | |
| w | m | |
| h | m | |
| Kgm |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Juárez-Pérez, S.; Martín-Parra, A.; Arena, A.; Ottaviano, E.; Gattulli, V.; Castillo-García, F.J. Dynamic Control of a Novel Planar Cable-Driven Parallel Robot with a Large Wrench Feasible Workspace. Actuators 2022, 11, 367. https://doi.org/10.3390/act11120367
Juárez-Pérez S, Martín-Parra A, Arena A, Ottaviano E, Gattulli V, Castillo-García FJ. Dynamic Control of a Novel Planar Cable-Driven Parallel Robot with a Large Wrench Feasible Workspace. Actuators. 2022; 11(12):367. https://doi.org/10.3390/act11120367
Chicago/Turabian StyleJuárez-Pérez, Sergio, Andrea Martín-Parra, Andrea Arena, Erika Ottaviano, Vincenzo Gattulli, and Fernando J. Castillo-García. 2022. "Dynamic Control of a Novel Planar Cable-Driven Parallel Robot with a Large Wrench Feasible Workspace" Actuators 11, no. 12: 367. https://doi.org/10.3390/act11120367
APA StyleJuárez-Pérez, S., Martín-Parra, A., Arena, A., Ottaviano, E., Gattulli, V., & Castillo-García, F. J. (2022). Dynamic Control of a Novel Planar Cable-Driven Parallel Robot with a Large Wrench Feasible Workspace. Actuators, 11(12), 367. https://doi.org/10.3390/act11120367