

Integrated Propulsion and Cabin-Cooling Management for Electric Vehicles



Abstract
:1. Introduction
- A joint optimization-based MPC is proposed to address the integration problem of eco-driving and thermal management. In order to achieve cabin thermal comfort, we introduce a novel state that constrains the average temperature over a moving window, thus ensuring fairness in the assessment of energy savings;
- A co-optimization-based MPC is subsequently proposed in order to produce comparable performance with a lower computational load;
- A detailed analysis is conducted in which the proposed MPC methods are compared to other benchmark control methods and their practicability is examined.
2. System Modeling
2.1. Vehicle Longitudinal Dynamics
2.2. Propulsion System
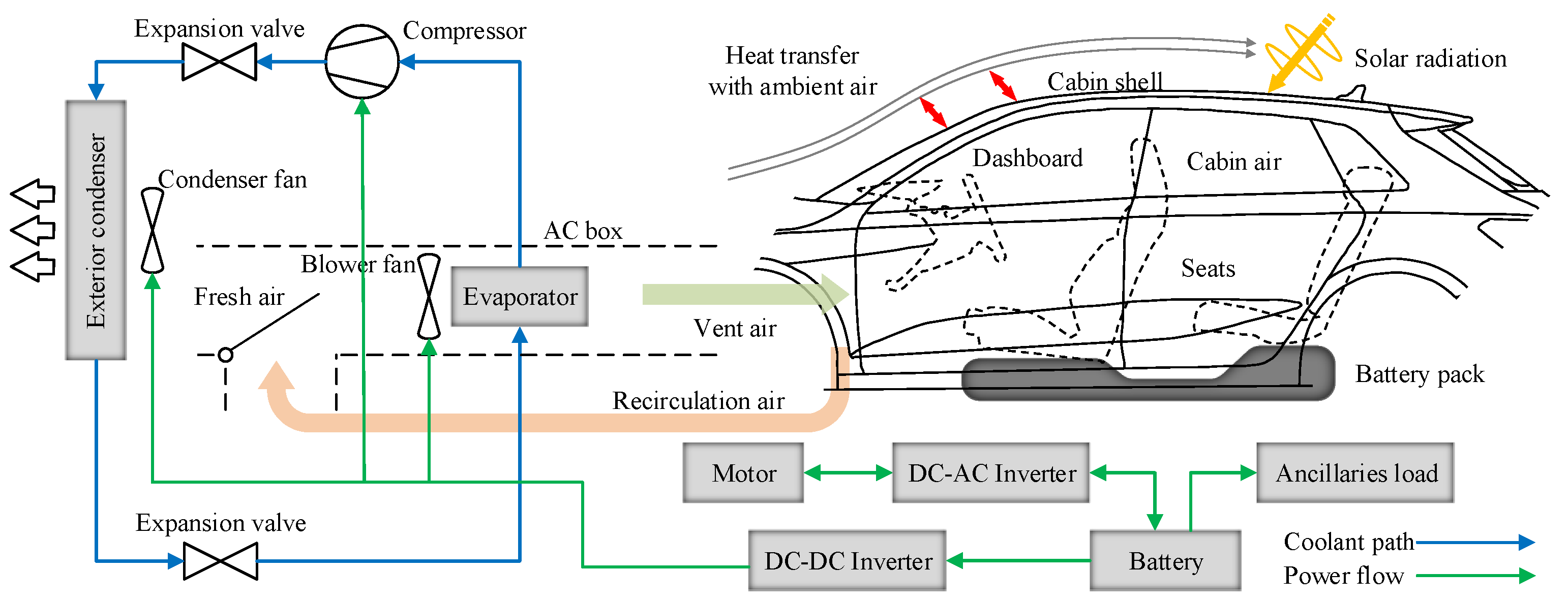
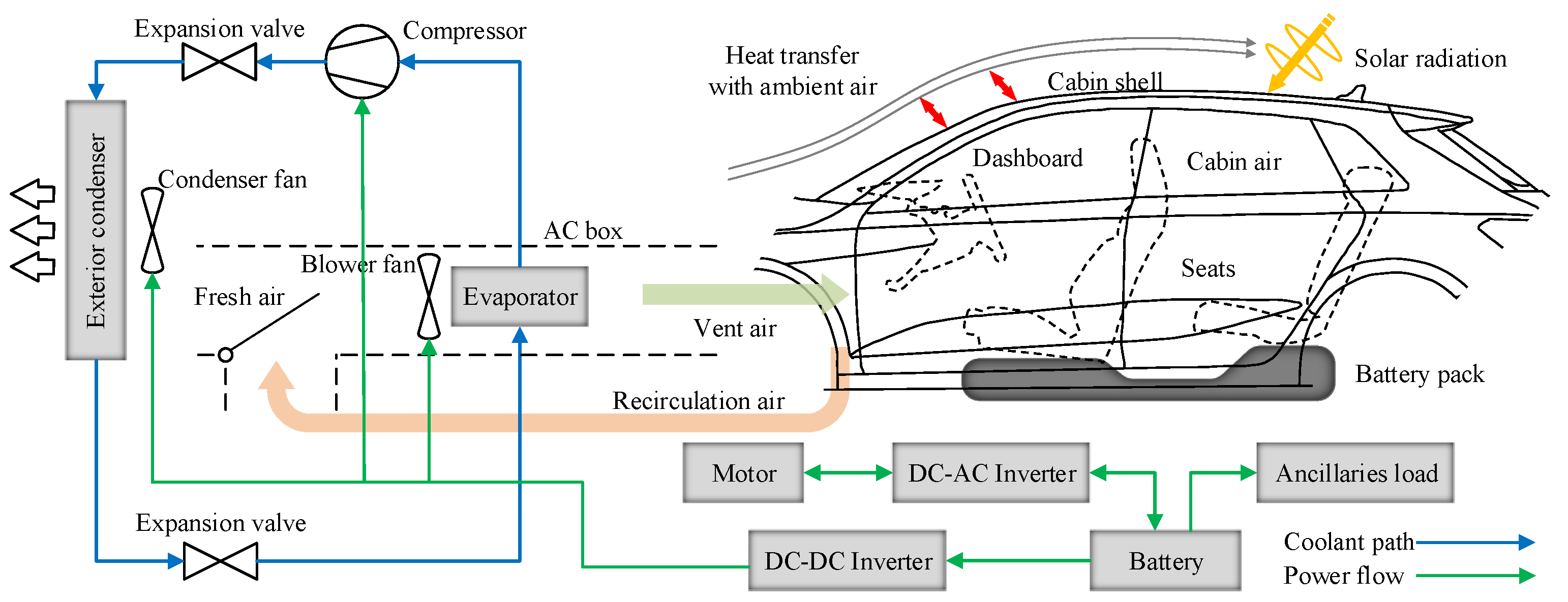
2.3. AC System
- The temperatures and are dynamic but they change slowly and have little impact on the integration of the system. Hence, they are considered as the input parameters.
2.4. Battery System
3. MPC Method and Formulation
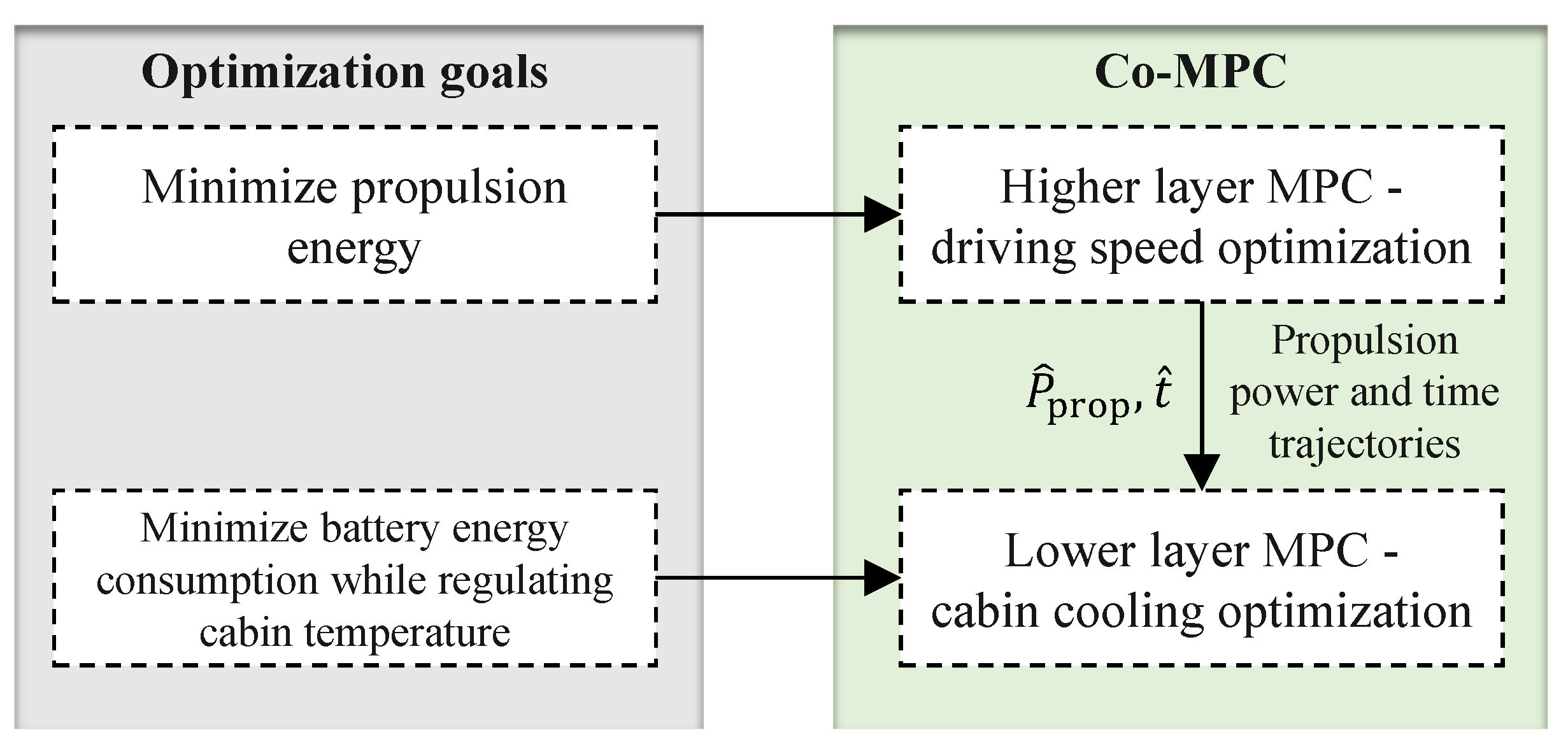
3.1. Joint Optimization-Based MPC Method
- The passing time over the prediction horizon N, which should adhere to a specified valuewhere is the desired passing time and is computed by
- The target speed, as the vehicle is expected to end the horizon with the average or greater speed. This requires
- The target average cabin temperature in Equation (21).
3.2. Co-Optimization-Based MPC Method
4. Case Studies
4.1. Parameters and Numerical Solver
4.2. Reference Methods
4.3. Simulation Results
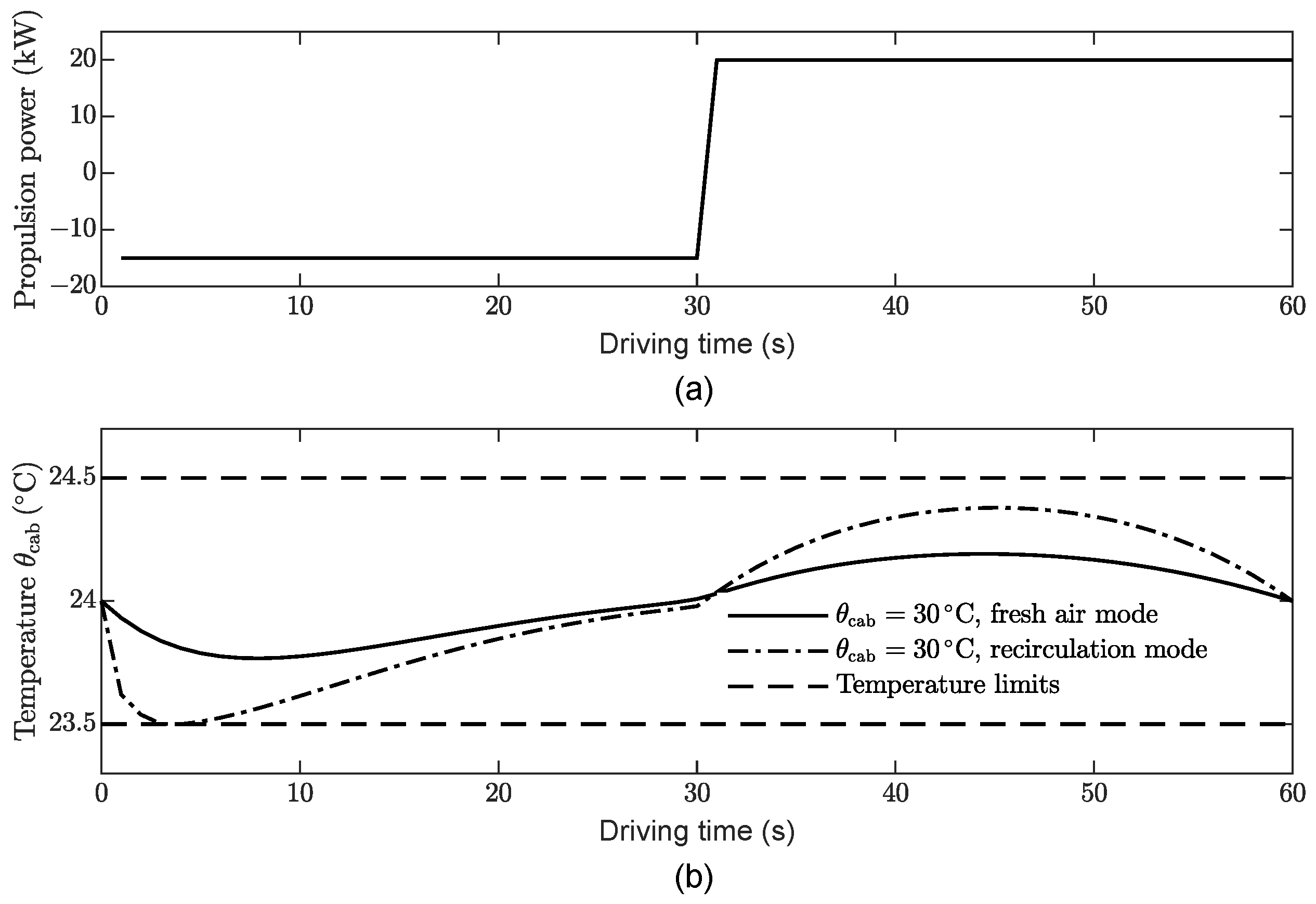
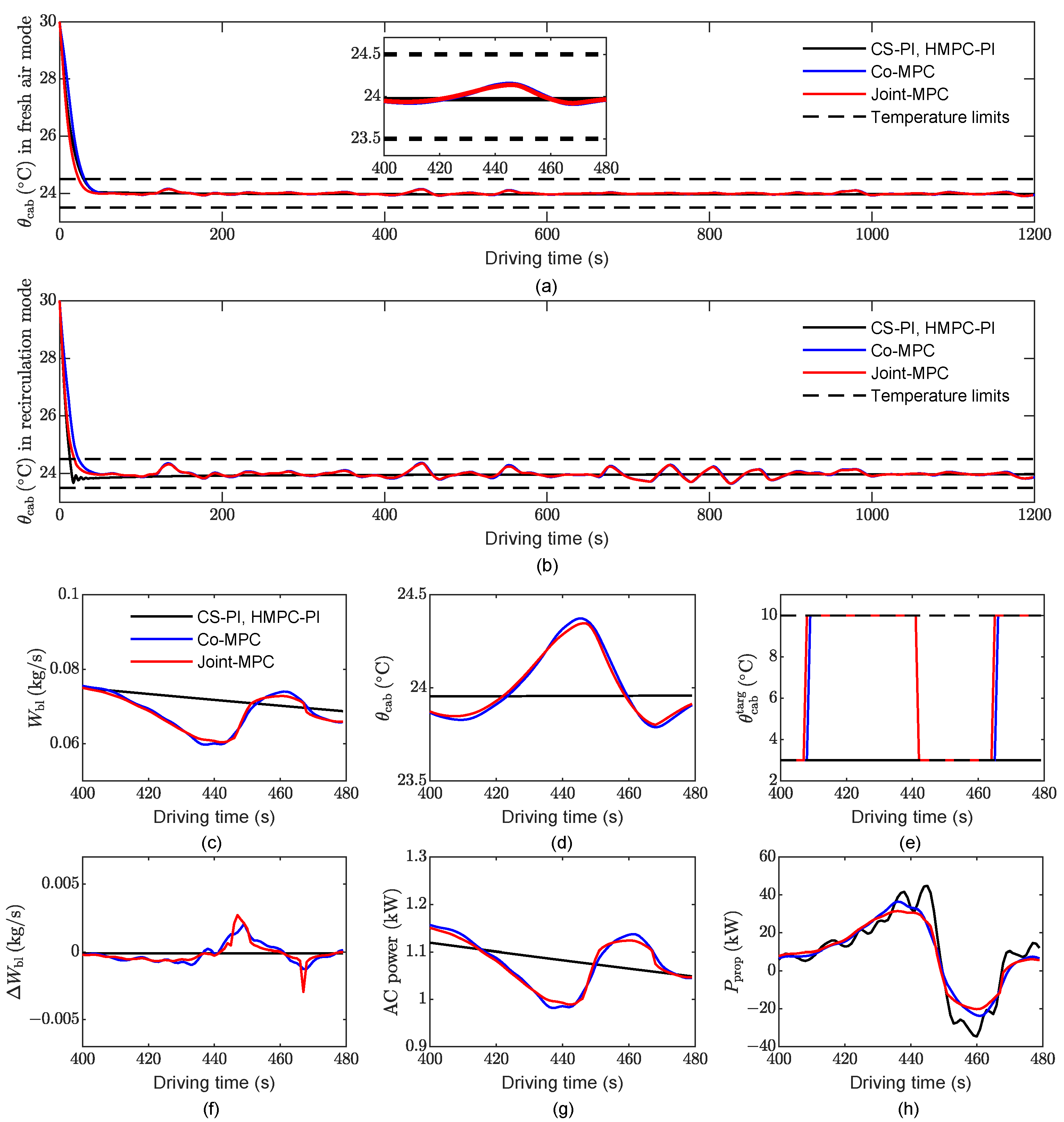
- In fresh-air mode and when the propulsion power is negative, the proposed LMPC does not decrease the cabin temperature too much below the average. This is because the thermal losses increase with the difference between the ambient and cabin temperatures and are much greater than the losses from cycling the energy twice through the battery, i.e., first recuperating the braking energy in the battery, and then using it later to cool down the cabin when the propulsion power is positive. Hence, the thermal buffer in fresh-air mode is much less efficient than the electric buffer.
- In recirculation mode, the LMPC can make greater use of the thermal buffer to reduce energy losses caused by double electricity cycling. During negative propulsion power, the braking energy is used directly by the AC system to cool the cabin until the lower temperature limit is reached, thus reducing the amount of energy recuperated in the battery. During the positive propulsion power, the cabin temperature passively increases due to the influence of the hot ambient temperature, although the battery energy is still needed by the AC system to keep the average temperature at 24 . As a result, the thermal buffer exhibits higher efficiency in recirculation mode than in fresh-air mode.
5. Performance Evaluation
5.1. Energy Consumption Evaluation
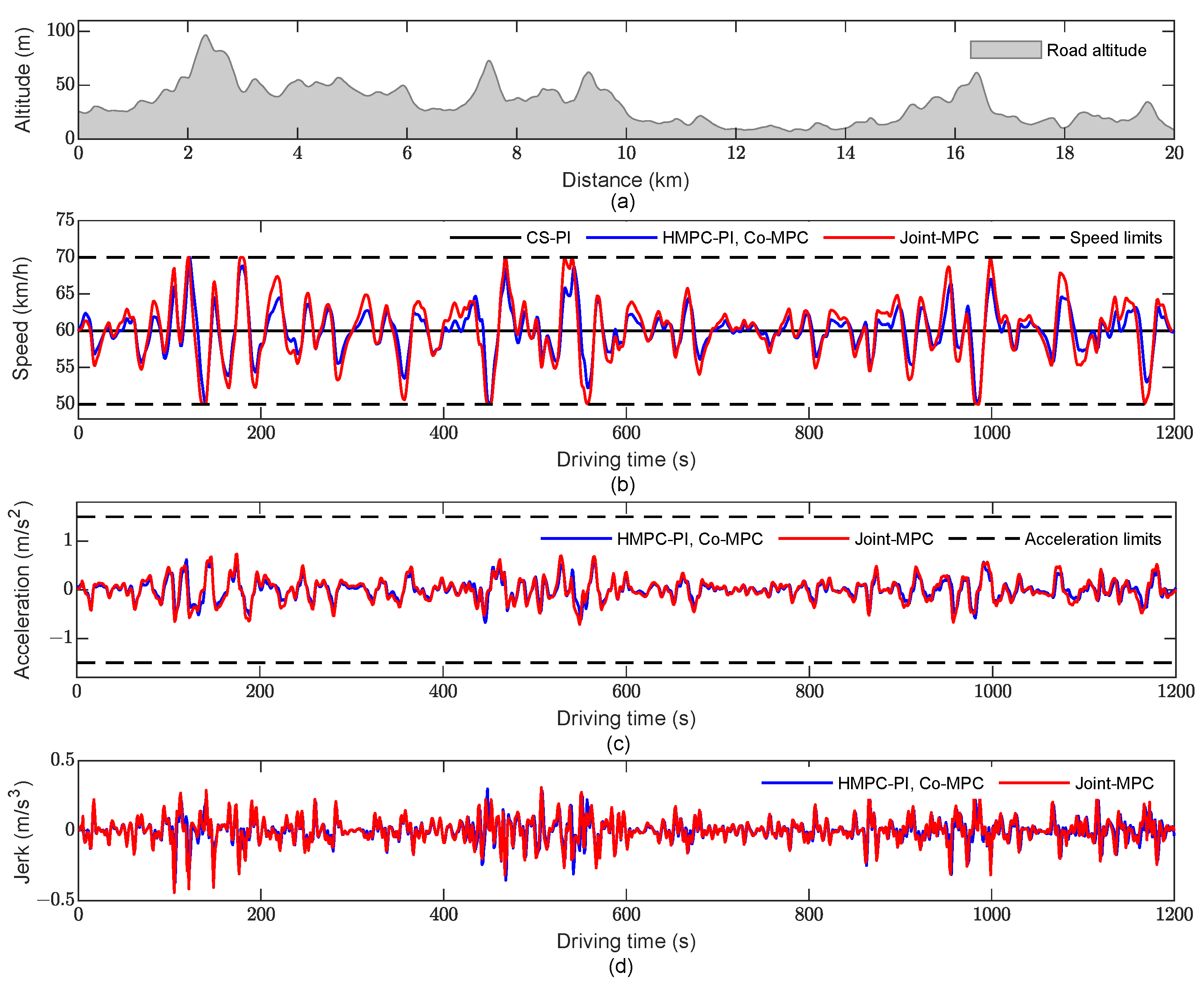
5.2. Driving and Thermal Comfort
5.3. Computation Time
6. Conclusions and Future Work
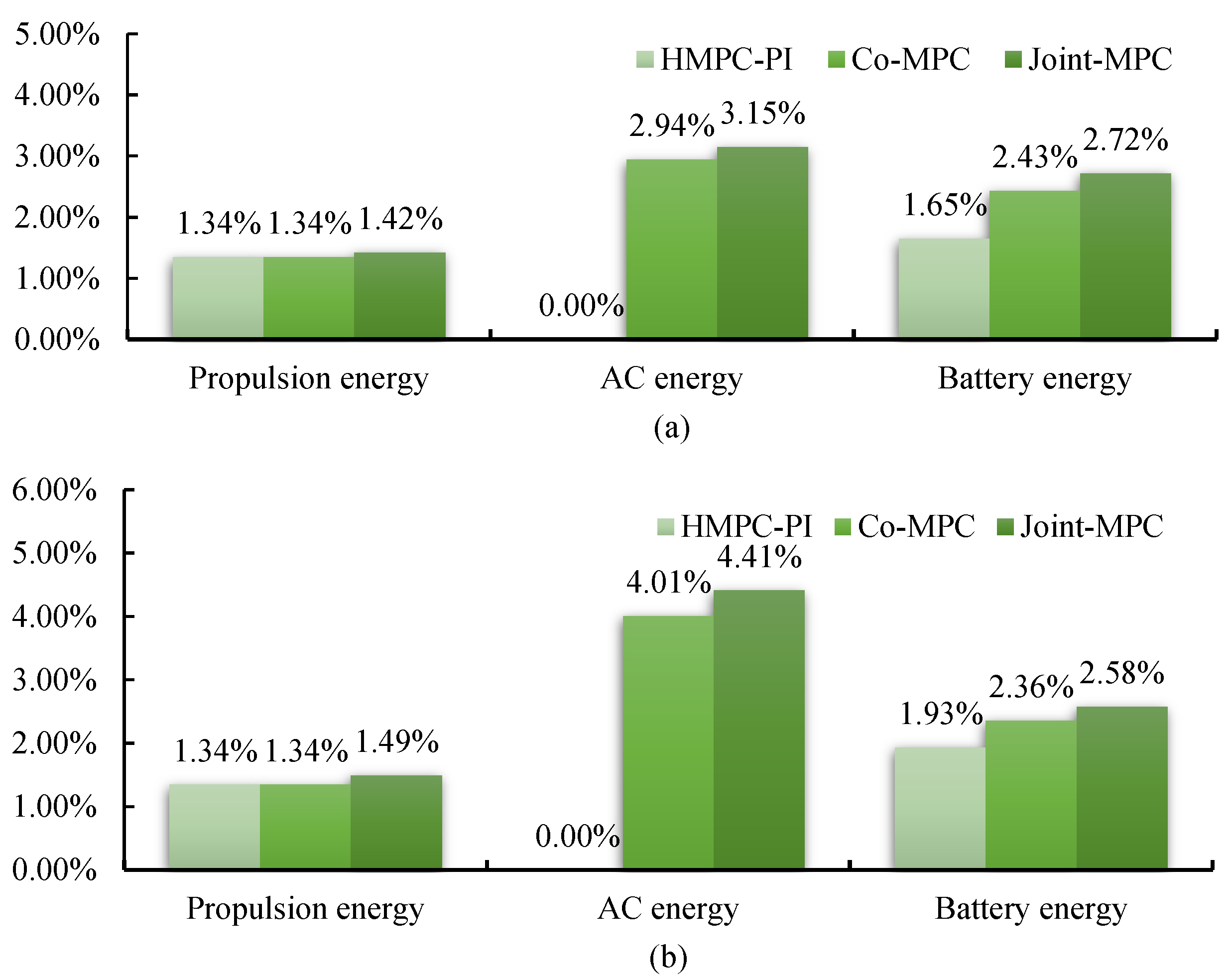
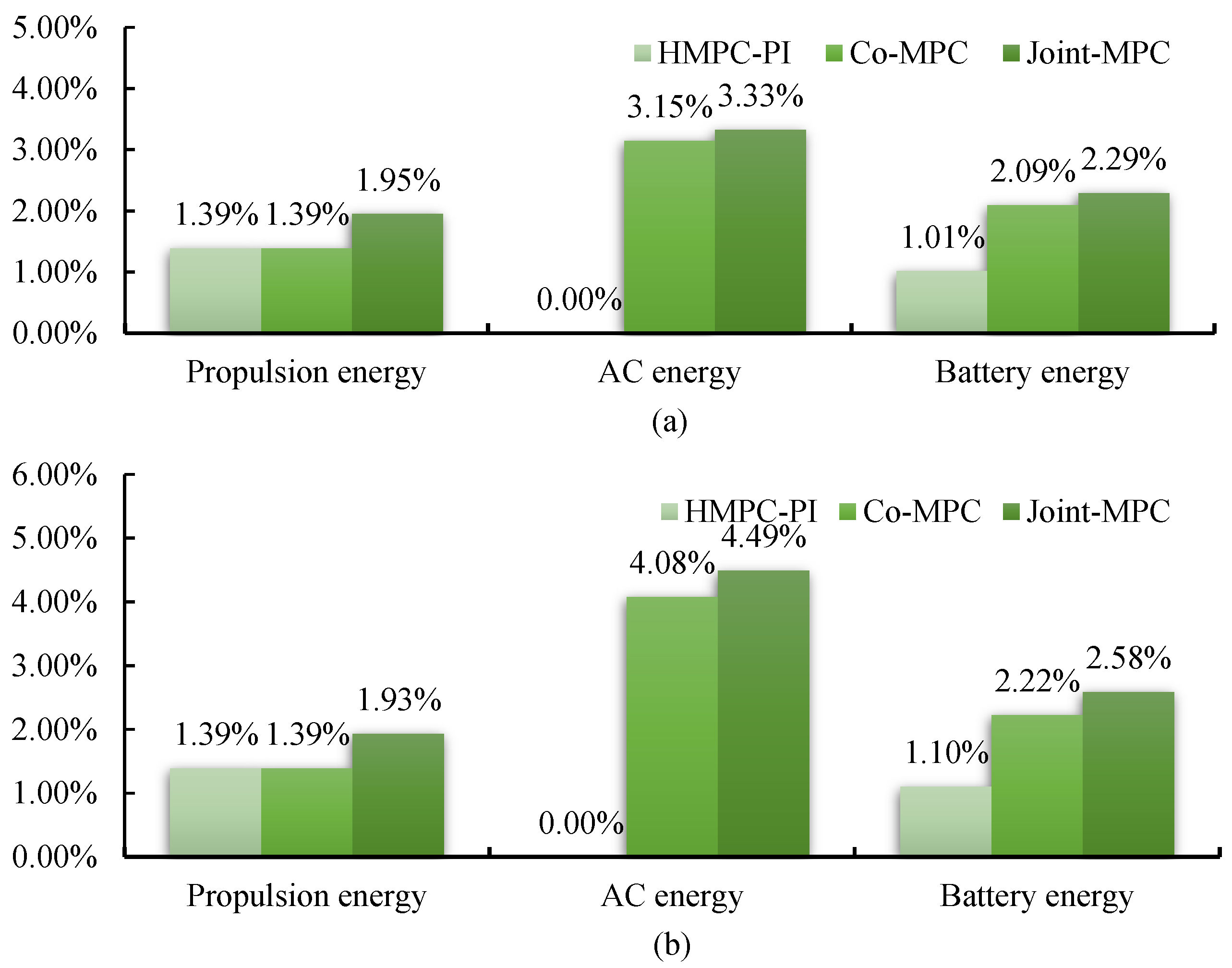
- Due to the integration of AC management, the proposed joint MPC ultimately reduces battery energy consumption by 0.65% to 1.48% compared to the HMPC-PI. Moreover, the thermal buffer is more effectively utilized in recirculation mode than in fresh-air mode.
- Both the joint MPC and co-MPC produce significant energy benefits while maintaining driving and thermal comfort. In particular, the total energy savings range from 2.09% to 2.72%, whereas the AC energy savings range from 2.94% to 4.49%.
- In comparison with the co-MPC, the joint MPC has higher energy benefits but also higher computational overhead. Hence, the co-MPC appears to be a suitable choice for real-time applications with limited computational power.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Muratori, M.; Alexander, M.; Arent, D.; Bazilian, M.; Dede, E.M.; Farrell, J.; Gearhart, C.; Greene, D.; Jenn, A.; Keyser, M. The rise of electric vehicles—2020 status and future expectations. Prog. Energy 2021, 3, 022002. [Google Scholar] [CrossRef]
- Santos, G.; Rembalski, S. Do electric vehicles need subsidies in the uk? Energy Policy 2021, 149, 111890. [Google Scholar] [CrossRef]
- Wang, N.; Tang, L.; Pan, H. A global comparison and assessment of incentive policy on electric vehicle promotion. Sustain. Cities Soc. 2019, 44, 597–603. [Google Scholar] [CrossRef]
- Pevec, D.; Babic, J.; Carvalho, A.; Ghiassi-Farrokhfal, Y.; Ketter, W.; Podobnik, V. A survey-based assessment of how existing and potential electric vehicle owners perceive range anxiety. J. Clean. Prod. 2020, 276, 122779. [Google Scholar] [CrossRef]
- Vahidi, A.; Sciarretta, A. Energy saving potentials of connected and automated vehicles. Transp. Res. Part C Emerg. Technol. 2018, 95, 822–843. [Google Scholar] [CrossRef]
- Dong, H.; Zhuang, W.; Chen, B.; Yin, G.; Wang, Y. Enhanced eco-approach control of connected electric vehicles at signal-ized intersection with queue discharge prediction. IEEE Trans. Veh. Technol. 2021, 70, 5457–5469. [Google Scholar] [CrossRef]
- Gao, Y.; Yang, S.; Wang, X.; Li, W.; Hou, Q.; Cheng, Q. Cyber Hierarchy Multiscale Integrated Energy Management of Intel-ligent Hybrid Electric Vehicles. Automot. Innov. 2022, 5, 438–452. [Google Scholar] [CrossRef]
- Ju, F.; Zhuang, W.; Wang, L.; Wang, Q. Iterative Dynamic Programming Based Model Predictive Control of Energy Efficient Cruising for Electric Vehicle with Terrain Preview; SAE Technical Paper; No.2020-01-0132; SAE: Warrendale, PA, USA, 2020. [Google Scholar]
- Li, J.; Liu, Y.; Zhang, Y.; Lei, Z.; Chen, Z.; Li, G. Data-driven based eco-driving control for plug-in hybrid electric vehicles. J. Power Sources 2021, 498, 229916. [Google Scholar] [CrossRef]
- Yang, J.; Xu, X.; Peng, Y.; Deng, P.; Wu, X.; Zhang, J. Hierarchical energy management of a hybrid propulsion system considering speed profile optimization. Energy 2022, 123098. [Google Scholar] [CrossRef]
- Zulkefli, M.A.M.; Zheng, J.; Sun, Z.; Liu, H.X. Hybrid powertrain optimization with trajectory prediction based on inter-vehicle-communication and vehicle-infrastructure-integration. Transport. Res. C Emerg. Technol. 2014, 45, 41–63. [Google Scholar] [CrossRef]
- Hu, J.; Shao, Y.; Sun, Z.; Wang, M.; Bared, J.; Huang, P. Integrated optimal eco-driving on rolling terrain for hybrid electric vehicle with vehicle-infrastructure communication. Transport. Res. C Emerg. Technol. 2016, 68, 228–244. [Google Scholar] [CrossRef]
- Xu, S.; Li, S.E.; Cheng, B.; Li, K. Instantaneous feedback control for a fuel-prioritized vehicle cruising system on highways with a varying slope. IEEE Trans. Intell. Transp. Syst. 2016, 18, 1210–1220. [Google Scholar] [CrossRef]
- Guo, L.; Zhang, X.; Zou, Y.; Han, L.; Du, G.; Guo, N.; Xiang, C. Co-optimization strategy of unmanned hybrid electric tracked vehicle combining eco-driving and simultaneous energy management. Energy 2022, 123309. [Google Scholar] [CrossRef]
- Guo, Q.; Angah, O.; Liu, Z.; Ban, X.J. Hybrid deep reinforcement learning based eco-driving for low-level connected and automated vehicles along signalized corridors. Transp. Res. Part C Emerg. Technol. 2021, 124, 102980. [Google Scholar] [CrossRef]
- Qi, C.; Zhu, Y.; Song, C.; Cao, J.; Xiao, F.; Zhang, X.; Xu, Z.; Song, S. Self-supervised reinforcement learning-based energy management for a hybrid electric vehicle. J. Power Sources 2021, 514, 230584. [Google Scholar] [CrossRef]
- Cai, H.; Xu, X. Lateral Stability Control of a Tractor-Semitrailer at High Speed. Machines 2022, 10, 716. [Google Scholar] [CrossRef]
- Xu, F.; Shen, T. Look-ahead prediction-based real-time optimal energy management for connected hevs. IEEE Trans. Veh. Technol. 2020, 69, 2537–2551. [Google Scholar] [CrossRef]
- Ju, F.; Murgovski, N.; Zhuang, W.; Wang, Q.; Wang, L. Predictive Cruise Controller for Electric Vehicle to Save Energy and Extend Battery Lifetime. IEEE Trans. Veh. Technol. 2022; early access. [Google Scholar]
- Uebel, S.; Murgovski, N.; Baker, B.; Sjöberg, J. A two-level mpc for energy management including velocity control of hybrid electric vehicles. IEEE Trans. Veh. Technol. 2019, 68, 5494–5505. [Google Scholar] [CrossRef]
- Lajunen, A.; Yang, Y.; Emadi, A. Review of cabin thermal management for electrified passenger vehicles. IEEE Trans. Veh. Technol. 2020, 69, 6025–6040. [Google Scholar] [CrossRef]
- Al-Wreikat, Y.; Serrano, C.; Sodre, J.R. Effects of ambient temperature and trip characteristics on the energy consumption of an electric vehicle. Energy 2022, 238, 122028. [Google Scholar] [CrossRef]
- Vatanparvar, K.; Al Faruque, M.A. Path to eco-driving: Electric vehicle hvac and route joint optimization. IEEE Design Test. 2017, 35, 8–15. [Google Scholar] [CrossRef]
- Wang, H.; Kolmanovsky, I.; Amini, M.R.; Sun, J. Model predictive climate control of connected and automated vehicles for improved energy efficiency. In Proceedings of the Annual American Control Conference, Milwaukee, WI, USA, 27–29 June 2018. [Google Scholar]
- Wang, H.; Meng, Y.; Zhang, Q.; Amini, M.R.; Kolmanovsky, I.; Sun, J.; Jennings, M. Mpc-based precision cooling strategy (pcs) for efficient thermal management of automotive air conditioning system. In Proceedings of the IEEE Conference on Control Technology and Applications, Hong Kong, China, 19–21 August 2019. [Google Scholar]
- Wang, H.; Amini, M.R.; Hu, Q.; Kolmanovsky, I.; Sun, J. Eco-cooling control strategy for automotive air-conditioning system: Design and experimental validation. IEEE Trans. Contr. Syst. Technol. 2020, 29, 2339–2350. [Google Scholar] [CrossRef]
- Amini, M.R.; Wang, H.; Gong, X.; Liao-McPherson, D.; Kolmanovsky, I.; Sun, J. Cabin and battery thermal management of connected and automated hevs for improved energy efficiency using hierarchical model predictive control. IEEE Trans. Contr. Syst. Technol. 2019, 28, 1711–1726. [Google Scholar] [CrossRef]
- Hu, Q.; Amini, M.R.; Kolmanovsky, I.; Sun, J.; Wiese, A.; Seeds, J.B. Multihorizon model predictive control: An application to integrated power and thermal management of connected hybrid electric vehicles. IEEE Trans. Contr. Syst. Technol. 2021, 30, 1052–1064. [Google Scholar] [CrossRef]
- Liu, Y.; Zhang, J. Electric vehicle battery thermal and cabin climate management based on model predictive control. J. Mech. Des. 2021, 143, 031705. [Google Scholar] [CrossRef]
- Zhao, S.; Mi, C.C. A two-stage real-time optimized ev battery cooling control based on hierarchical and iterative dynamic programming and mpc. IEEE Trans. Intell. Transport. Syst. 2021, 23, 11677–11687. [Google Scholar] [CrossRef]
- Zhao, S.; Amini, M.R.; Sun, J.; Mi, C.C. A two-layer real-time optimization control strategy for integrated battery thermal management and hvac system in connected and automated hevs. IEEE Trans. Veh. Technol. 2021, 70, 6567–6576. [Google Scholar]
- Chen, Y.; Kwak, K.H.; Kim, J.; Kim, Y.; Jung, D. Energy-efficient cabin climate control of electric vehicles using linear time-varying model predictive control. Optim. Control Appl. Meth. 2021, 1–25. [Google Scholar] [CrossRef]
- Lohse-Busch, H.; Duoba, M.; Rask, E.; Meyer, M. Advanced Powertrain Research Facility Avta Nissan Leaf Testing and Analysis; Argonne National Laboratory: Lemont, IL, USA, 2012.
- Burress, T. Benchmarking state-of-the-art technologies. In Proceedings of the 2013 US Department of Energy Hydrogen and Fuel Cells Program and Vehicle Technologies Program Annual Merit Review and Peer Evaluation Meeting, Arlington, VA, USA, 13–16 May 2013. [Google Scholar]
- Kiss, T.; Chaney, L.; Meyer, J. New Automotive Air Conditioning System Simulation Tool Developed in Matlab/Simulink; Tech. Rep.; National Renewable Energy Lab.: Golden, CO, USA, 2013.
- Kiss, T.; Lustbader, J. Comparison of the Accuracy and Speed of Transient Mobile a/c System Simulation Models; Tech. Rep.; National Renewable Energy Lab.: Golden, CO, USA, 2014.
- Vatanparvar, K.; Al Faruque, M.A. Battery lifetime-aware automotive climate control for electric vehicles. In Proceedings of the ACM/EDAC/IEEE Design Automation Conference (DAC), San Francisco, CA, USA, 8–12 June 2015. [Google Scholar]
- Andersson, J.A.; Gillis, J.; Horn, G.; Rawlings, J.B.; Diehl, M. Casadi: A software framework for nonlinear optimization and optimal control. Math. Program. Comput. 2019, 11, 1–36. [Google Scholar] [CrossRef]
- Zhang, Q.; Li, S.E.; Deng, K. Automotive Air Conditioning: Optimization, Control and Diagnosis; Springer: Berlin/Heidelberg, Germany, 2016. [Google Scholar]
- Diehl, M. Real-Time Optimization for Large Scale Nonlinear Processes. Ph.D. Thesis, University of Heidelberg, Heidelberg, Germany, 2001. [Google Scholar]
- Ma, Y.; Ding, H.; Liu, Y.; Gao, J. Battery thermal management of intelligent-connected electric vehicles at low temperature based on nmpc. Energy 2021, 244, 122571. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Vehicle mass m | 1521 kg |
| Aerodynamic drag coefficient | |
| Vehicle front area | m2 |
| Rolling resistance coefficient f | 0.015 |
| Air density | kg/m3 |
| Gravitational acceleration g | m/s2 |
| Wheel radius r | m |
| Battery normal voltage | 365 V |
| Battery pack resistance | |
| Specific heat capacity of air | |
| Coefficient of performance COP | |
| AC parameter | [0.0699,0.0298,0.3566,−0.2961,−0.0845,−0.1004, |
| −1.5820,−0.3278,0.7205,0.6874,−11.3561] | |
| AC parameter | [1.51,26293,−2437,71] |
| Parameter | Value | |
|---|---|---|
| Joint MPC | Sampling interval | 20 m |
| Prediction/control horizon N | 50 | |
| Co-MPC | Sampling interval , | 20 m, 1 s |
| Prediction/control horizon , | 50, 60 |
| MPC Method | CS-PI | HMPC-PI | Co-MPC | Joint MPC | ||||
|---|---|---|---|---|---|---|---|---|
| Fresh | Recir | Fresh | Recir | Fresh | Recir | Fresh | Recir | |
| Average speed (km/h) | 60.00 | 60.00 | 60.02 | 60.02 | 60.02 | 60.02 | 60.01 | 60.04 |
| Average () | 23.97 | 23.97 | 23.97 | 23.98 | 23.98 | 23.97 | 23.94 | 23.95 |
| Propulsion energy (MJ) | 7.969 | 7.969 | 7.862 | 7.862 | 7.862 | 7.862 | 7.856 | 7.850 |
| AC energy (MJ) | 2.891 | 1.218 | 2.891 | 1.218 | 2.806 | 1.179 | 2.800 | 1.174 |
| Battery energy (MJ) | 11.123 | 9.426 | 10.940 | 9.244 | 10.853 | 9.203 | 10.821 | 9.183 |
| MPC Method | CS-PI | HMPC-PI | Co-MPC | Joint MPC | ||||
|---|---|---|---|---|---|---|---|---|
| Fresh | Recir | Fresh | Recir | Fresh | Recir | Fresh | Recir | |
| Average speed (km/h) | 60.00 | 60.00 | 59.98 | 59.98 | 59.98 | 59.98 | 59.95 | 59.95 |
| Average () | 24.00 | 24.00 | 24.00 | 24.00 | 24.01 | 24.00 | 24.01 | 24.01 |
| Propulsion energy (MJ) | 5.022 | 5.022 | 4.952 | 4.952 | 4.952 | 4.952 | 4.924 | 4.925 |
| AC energy (MJ) | 1.620 | 0.956 | 1.620 | 0.956 | 1.569 | 0.917 | 1.566 | 0.913 |
| Battery energy (MJ) | 6.985 | 6.345 | 6.915 | 6.275 | 6.839 | 6.204 | 6.825 | 6.181 |
| MPC Method | CS-PI | HMPC-PI | Co-MPC | Joint MPC |
|---|---|---|---|---|
| Computation time (ms) | 3 | 10 | 22 | 35 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ju, F.; Murgovski, N.; Zhuang, W.; Wang, L. Integrated Propulsion and Cabin-Cooling Management for Electric Vehicles. Actuators 2022, 11, 356. https://doi.org/10.3390/act11120356
Ju F, Murgovski N, Zhuang W, Wang L. Integrated Propulsion and Cabin-Cooling Management for Electric Vehicles. Actuators. 2022; 11(12):356. https://doi.org/10.3390/act11120356
Chicago/Turabian StyleJu, Fei, Nikolce Murgovski, Weichao Zhuang, and Liangmo Wang. 2022. "Integrated Propulsion and Cabin-Cooling Management for Electric Vehicles" Actuators 11, no. 12: 356. https://doi.org/10.3390/act11120356
APA StyleJu, F., Murgovski, N., Zhuang, W., & Wang, L. (2022). Integrated Propulsion and Cabin-Cooling Management for Electric Vehicles. Actuators, 11(12), 356. https://doi.org/10.3390/act11120356