



Secure Control of Networked Inverted Pendulum Visual Servo Systems Based on Active Disturbance Rejection Control



Abstract
:1. Introduction
- (1)
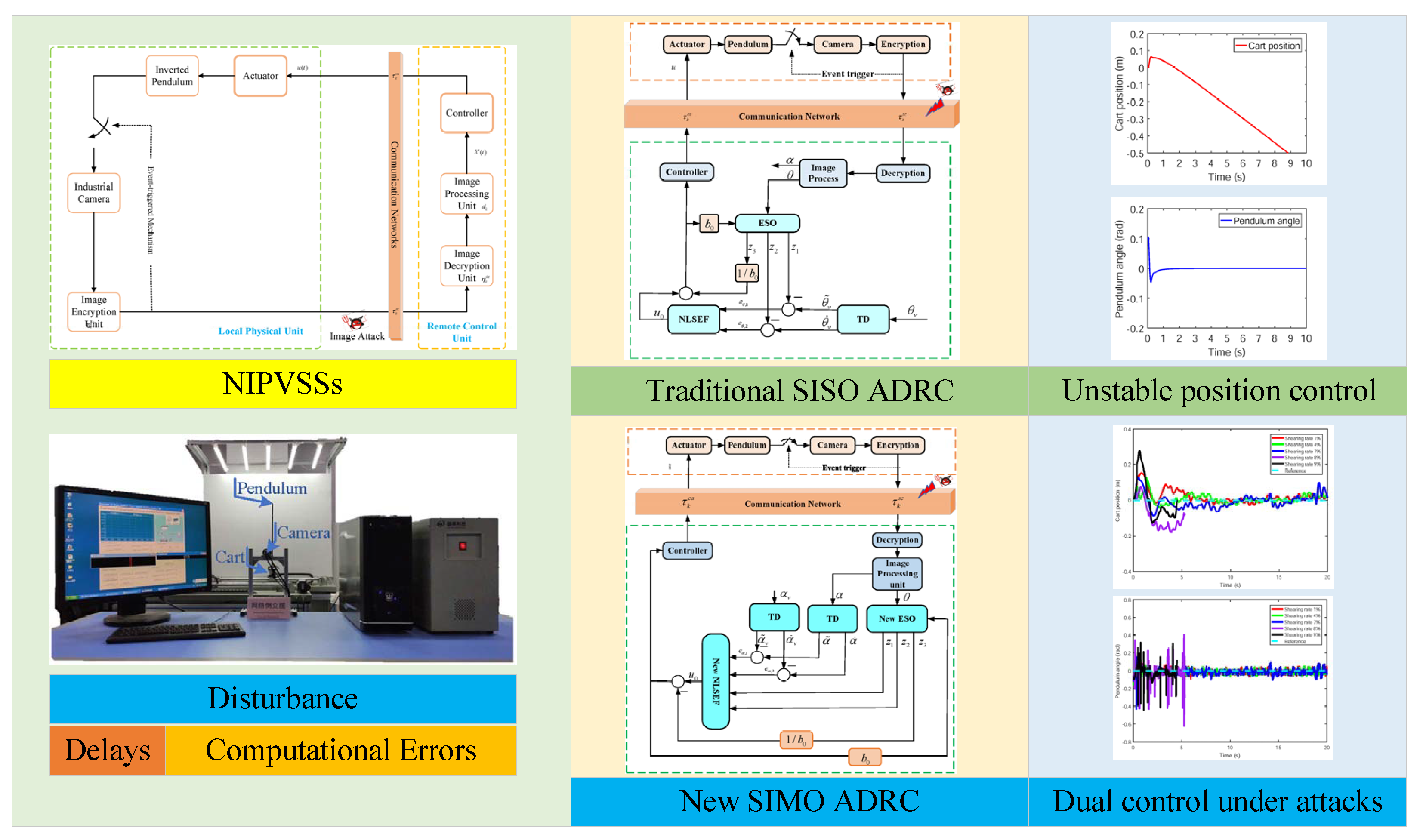
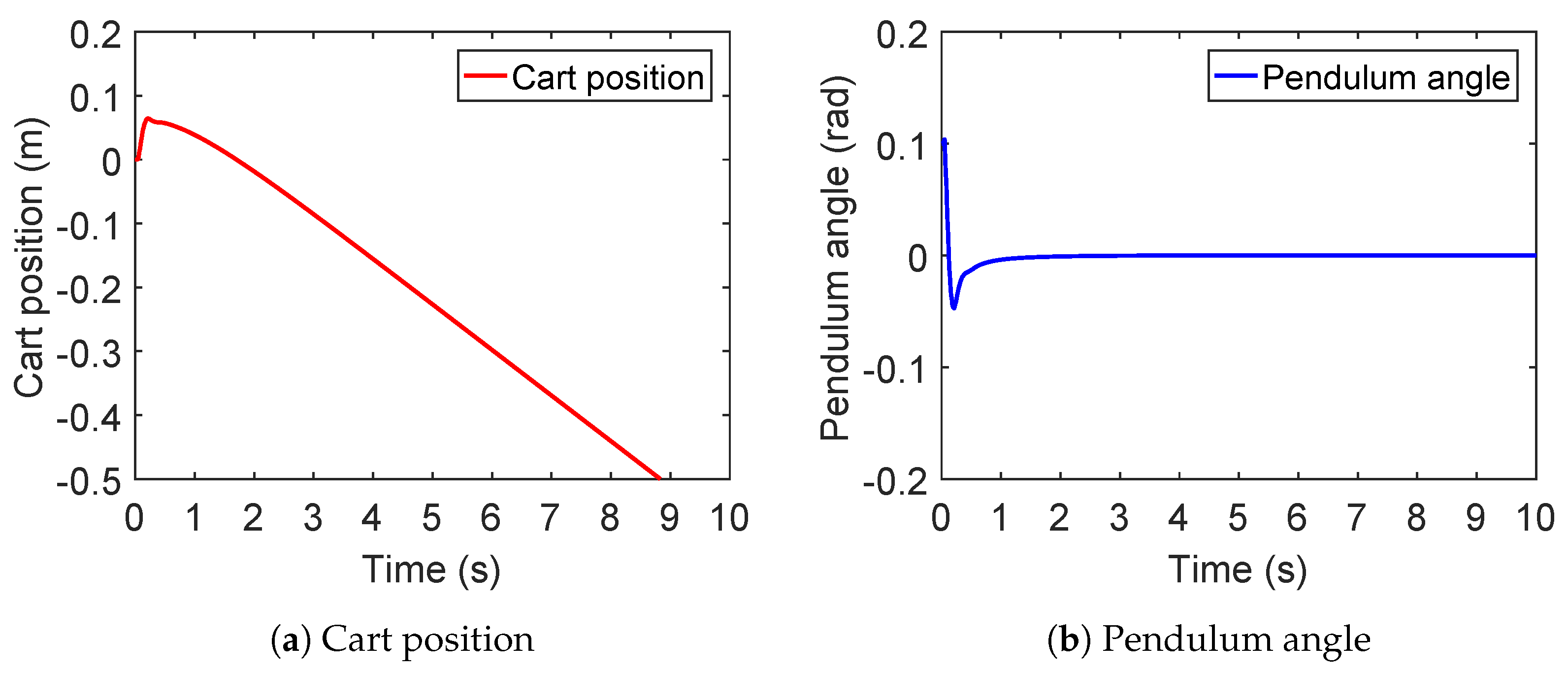
- The limitations of the traditional Single-Input-Single-Output (SISO) ADRC employed in NIPVSSs with disturbance are revealed. The limitations are that the ESO used in the traditional SISO ADRC brings large steady-state error, and the NLSEF employed in the traditional SISO ADRC can achieve stable control of pendulum angle, but cannot achieve stable control of cart position.
- (2)
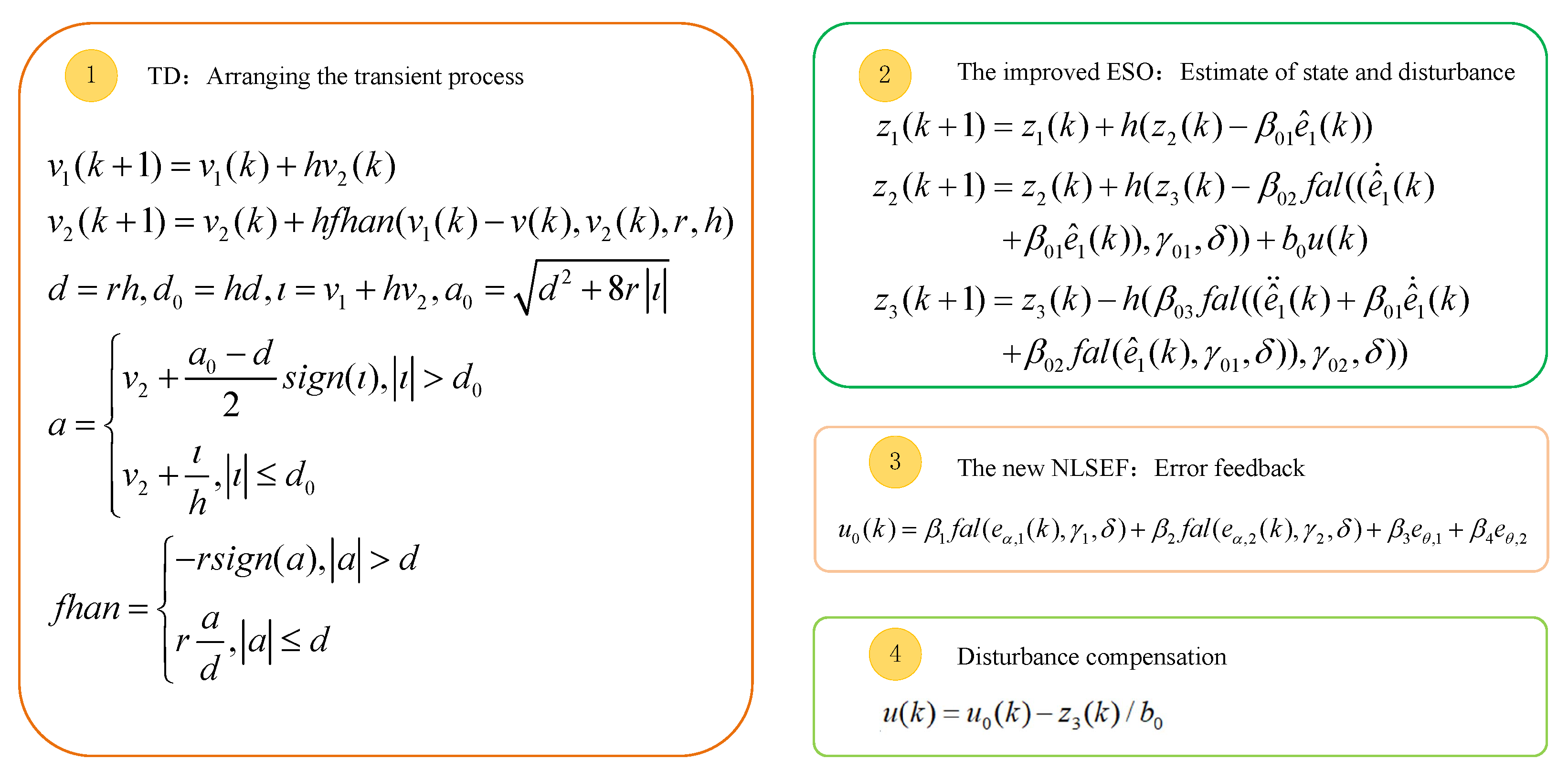
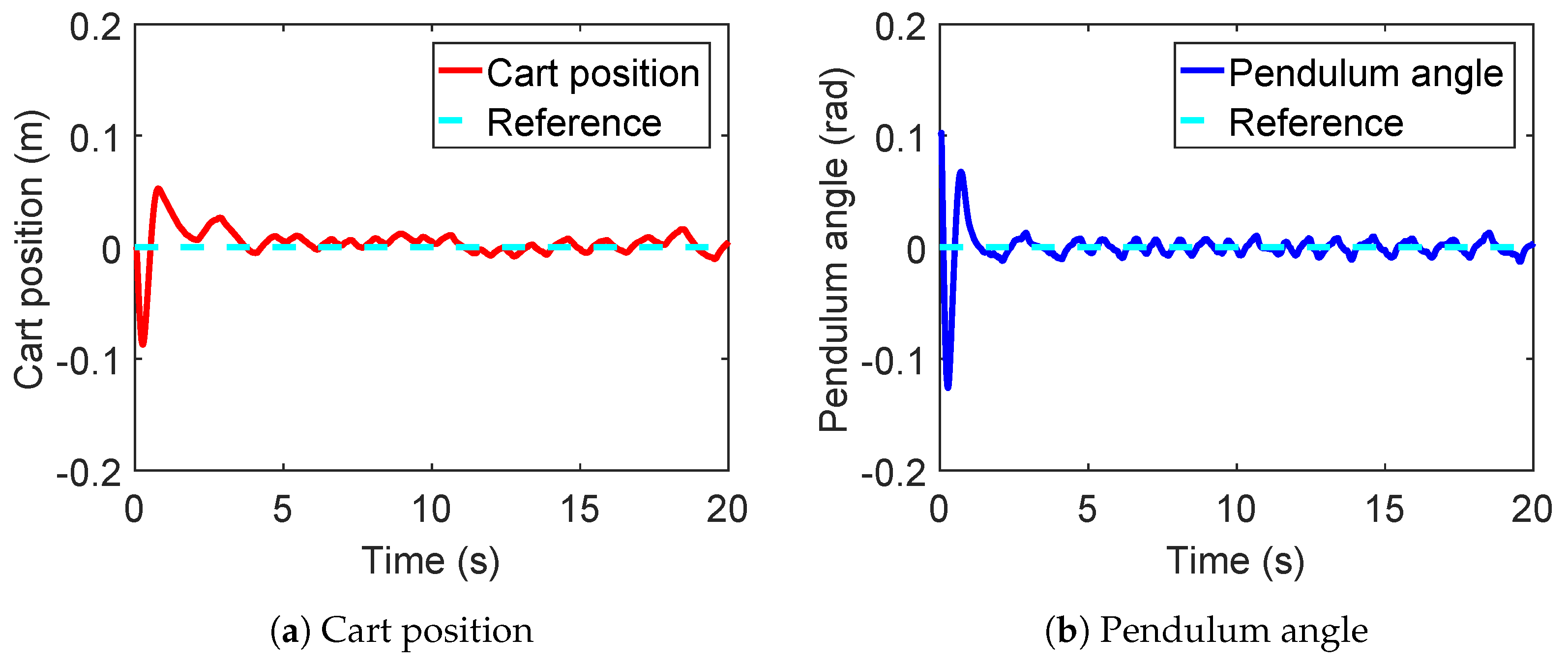
- A new Single-Input-Multi-Output (SIMO) ADRC method is proposed for NIPVSSs with disturbance. In the new SIMO ADRC method, the new ESO is designed by introducing additional first and second derivatives of error to reduce the steady-state error, and the new NLSEF is developed by taking both the calculated cart position and pendulum angle as its inputs to achieve dual stable control of pendulum angle and cart position.
2. NIPVSSs and Traditional ADRC
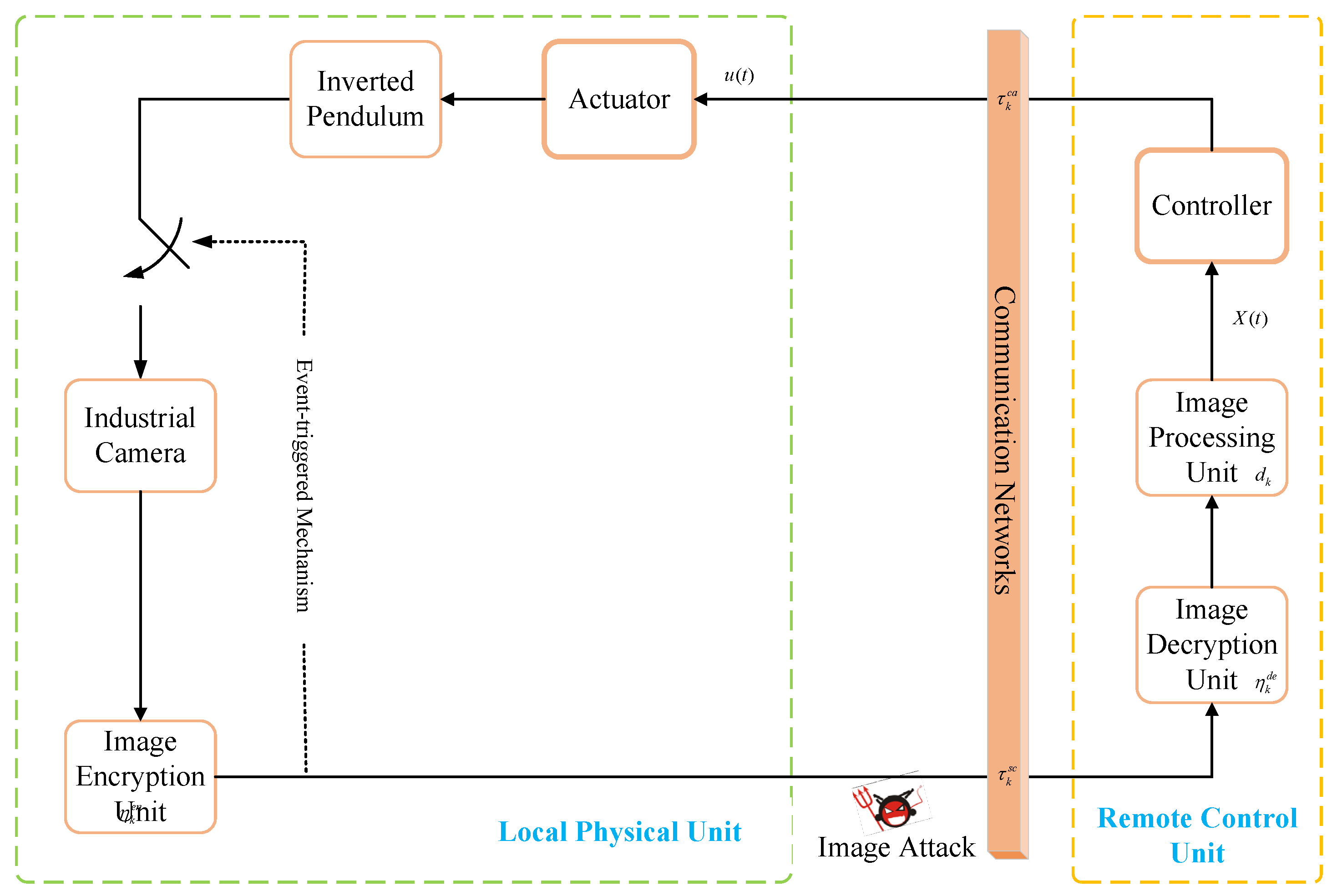
2.1. NIPVSSs
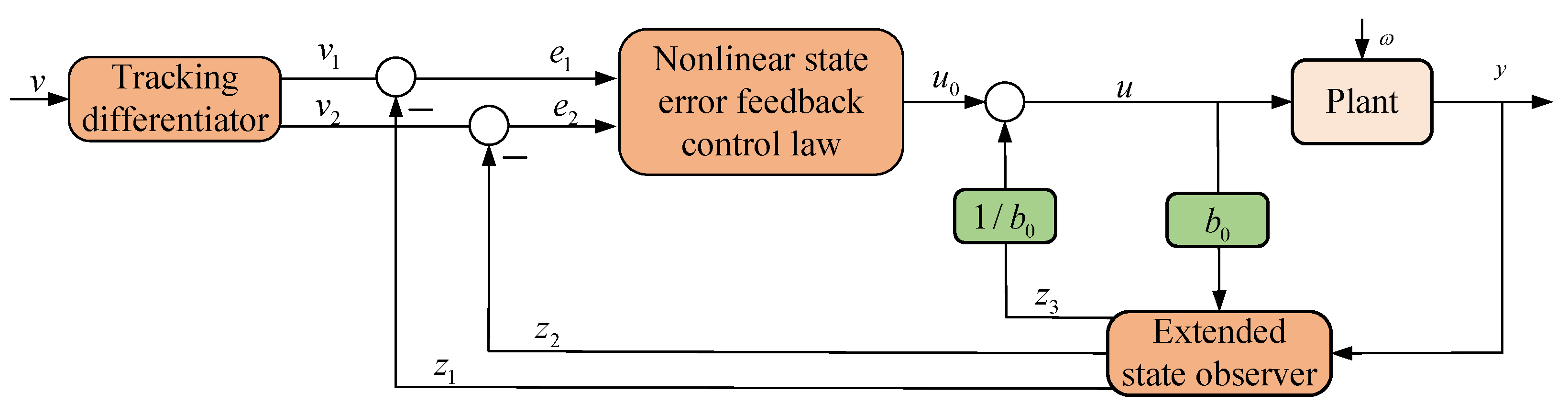
2.2. Traditional ADRC
3. ADRC-Based Secure Control of NIPVSSs
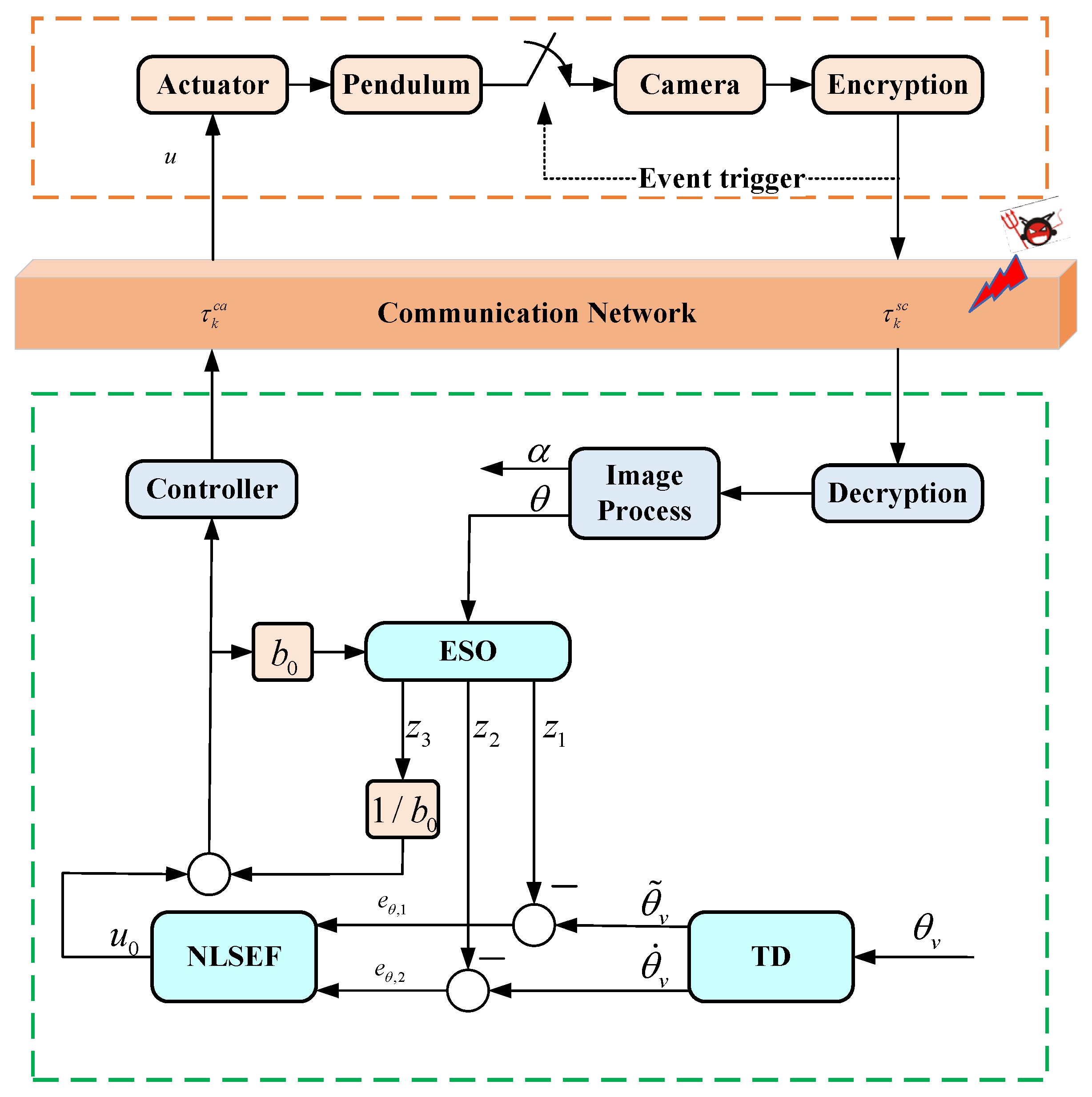
3.1. Traditional SISO ADRC-Based Secure Control of NIPVSSs
3.2. New SIMO ADRC-Based Secure Control of NIPVSSs
3.2.1. The New ESO
3.2.2. The New NLSEF
3.2.3. Stability of Closed-Loop System
4. Simulation and Real-Time Control Experiment
4.1. Parameter Tuning
4.2. Experiment Analysis
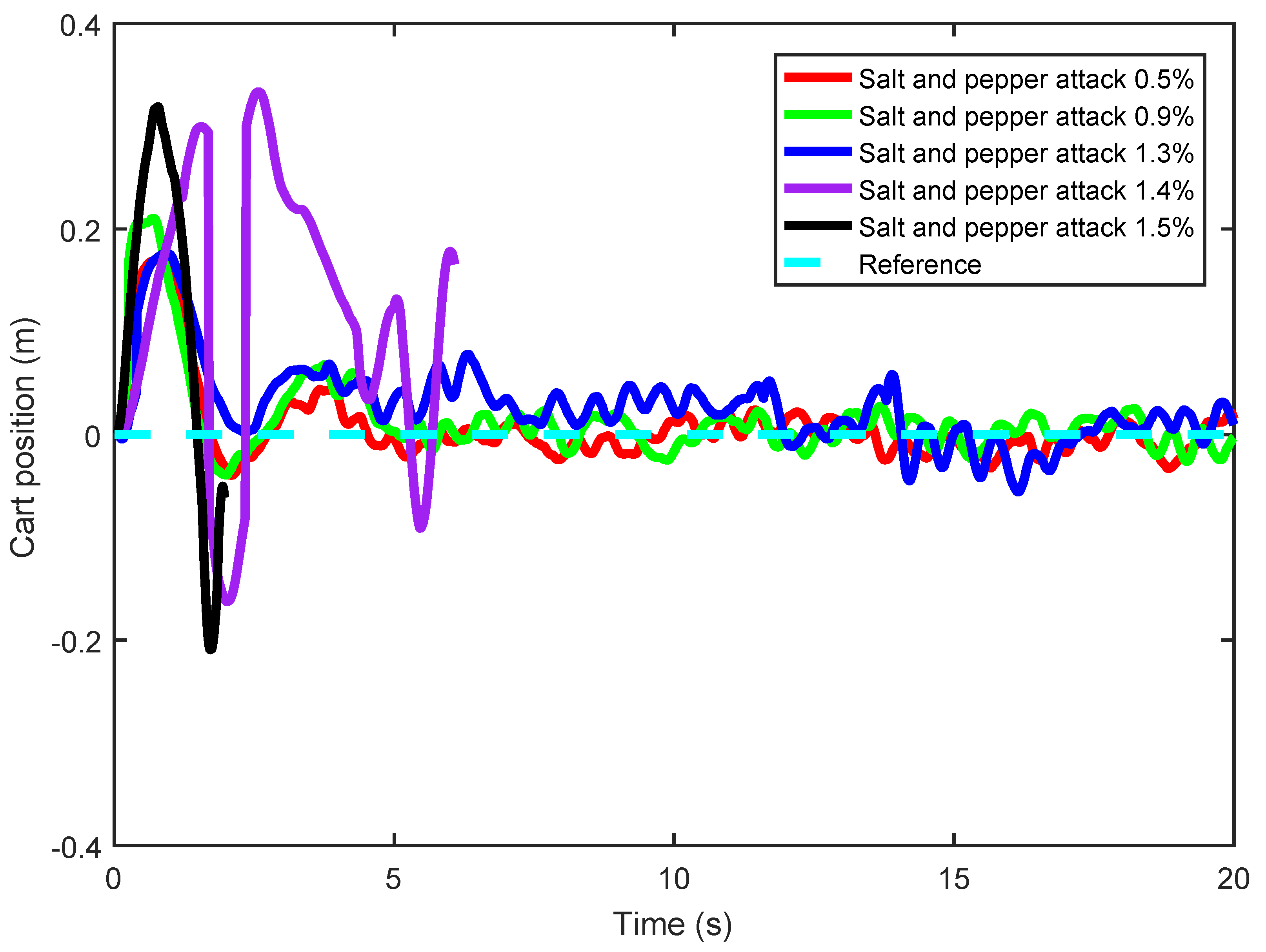
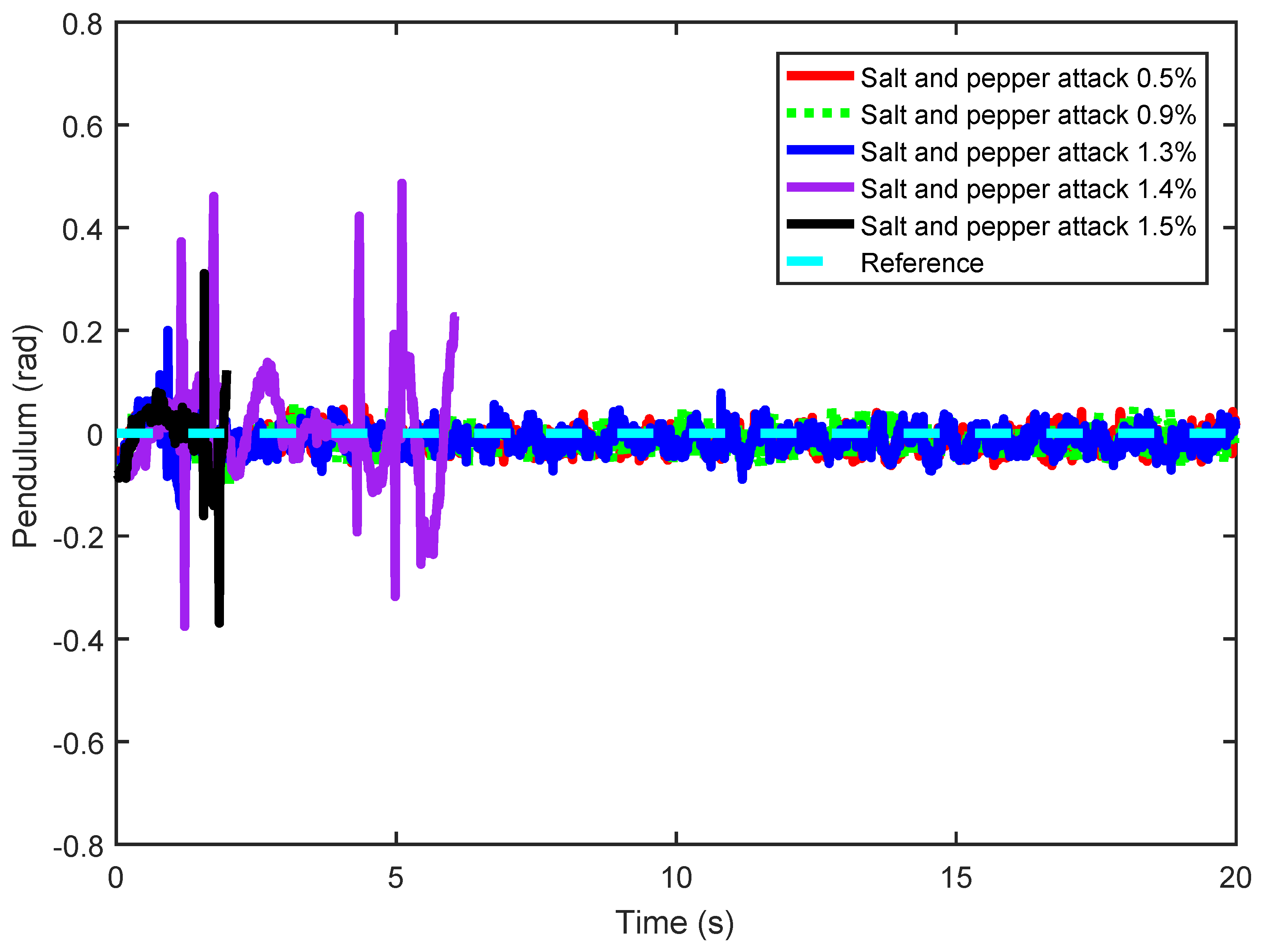
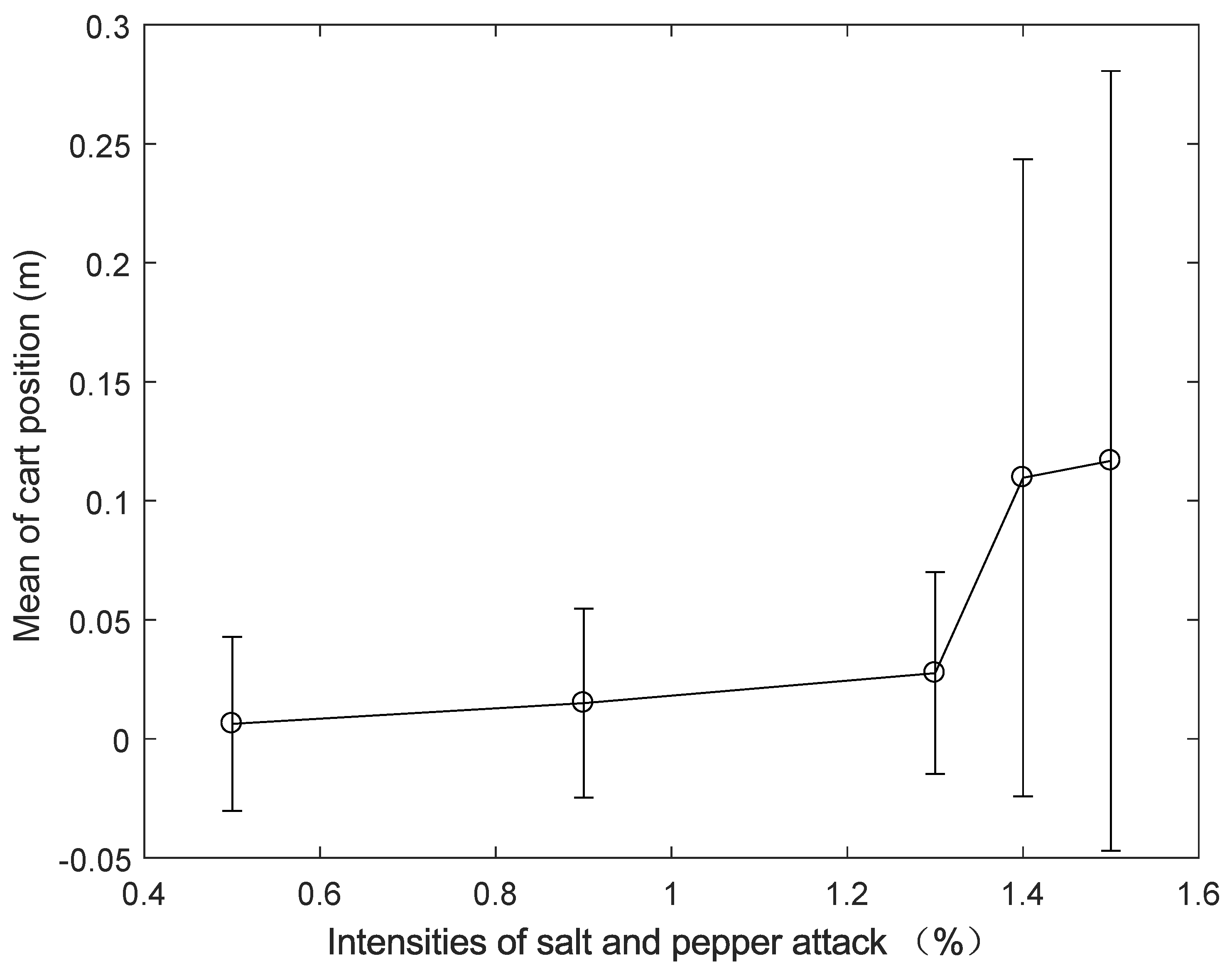
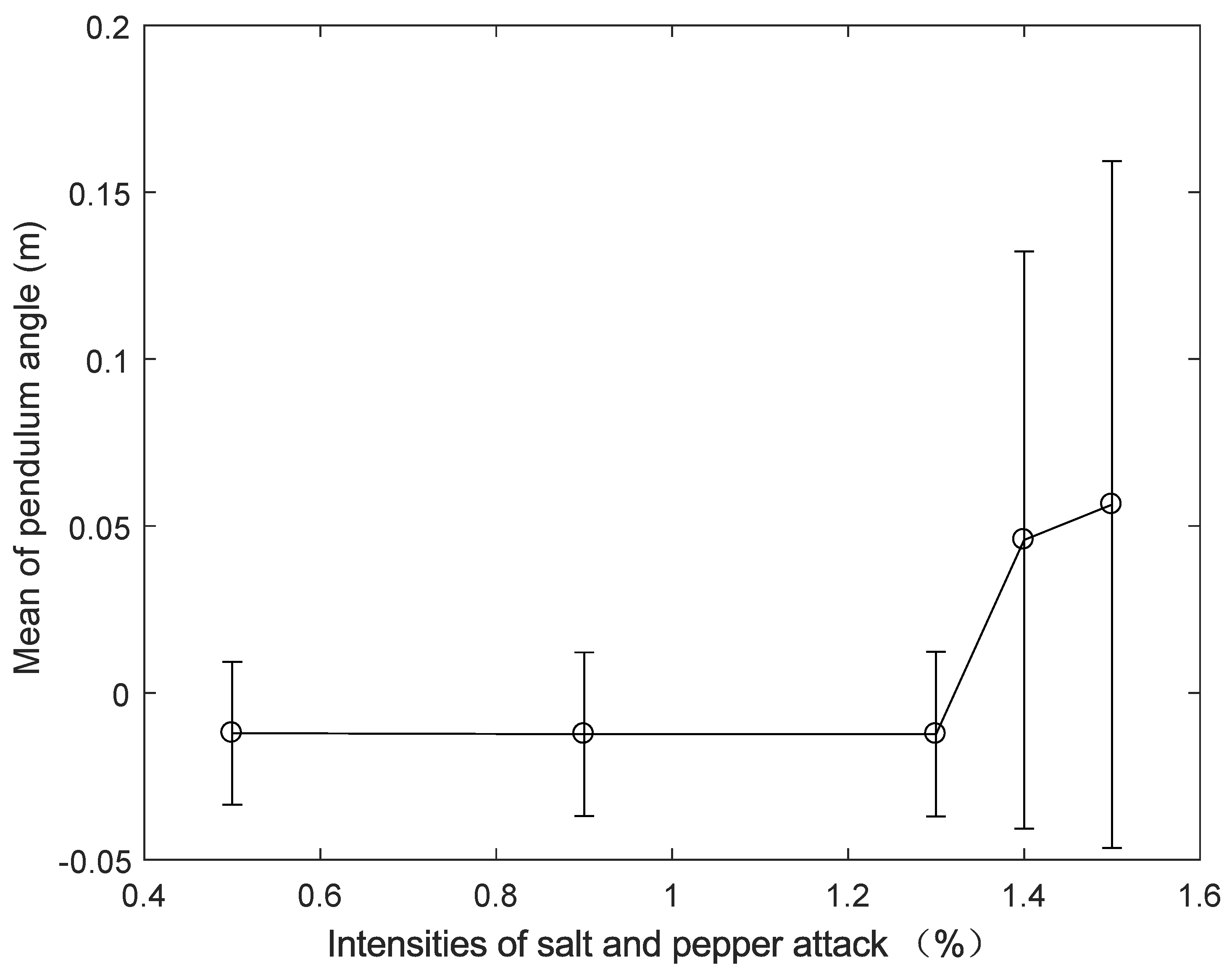
4.2.1. Analysis of the Influence of Salt and Pepper Attack on the Performance of NIPVSSs
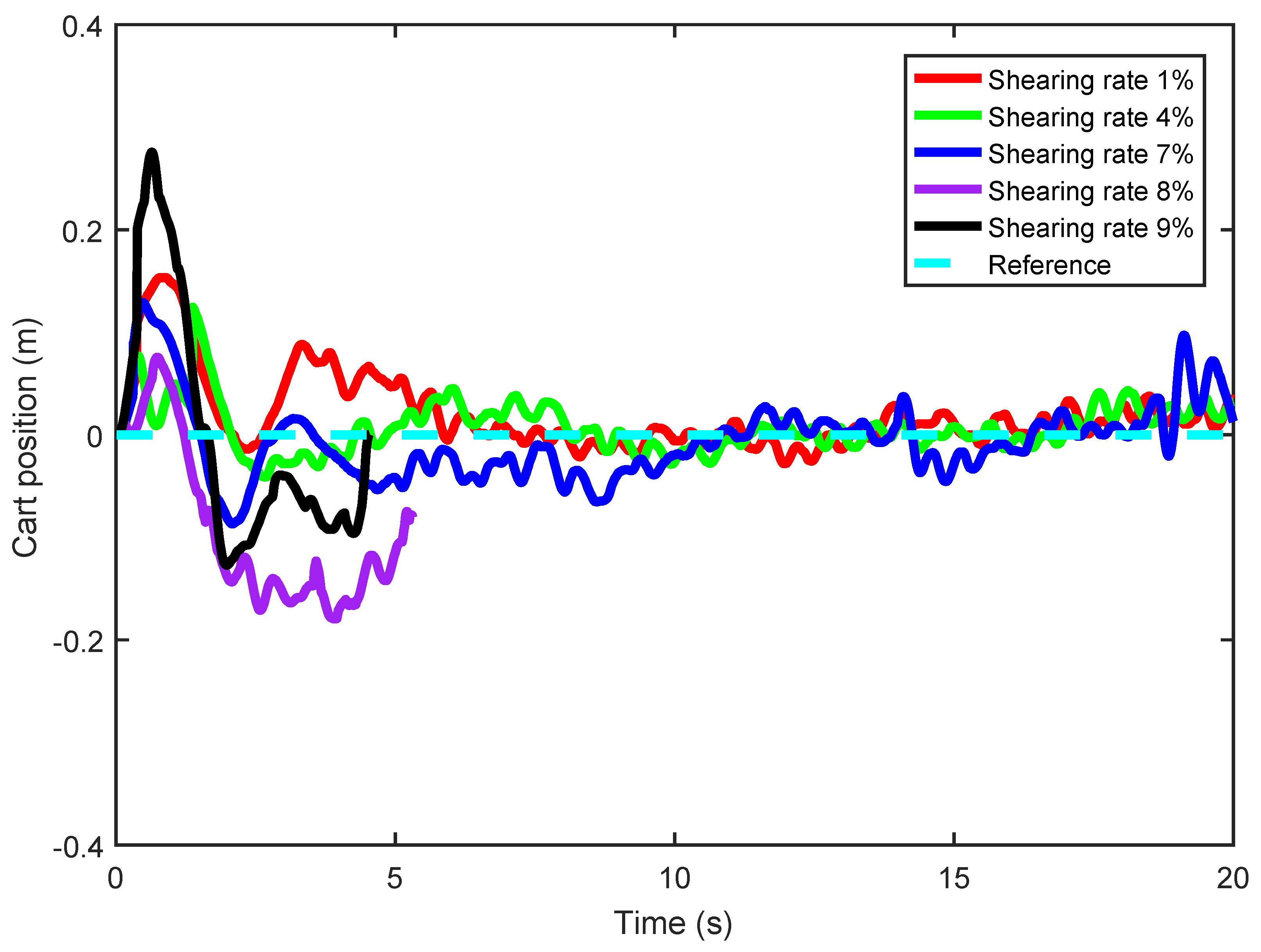
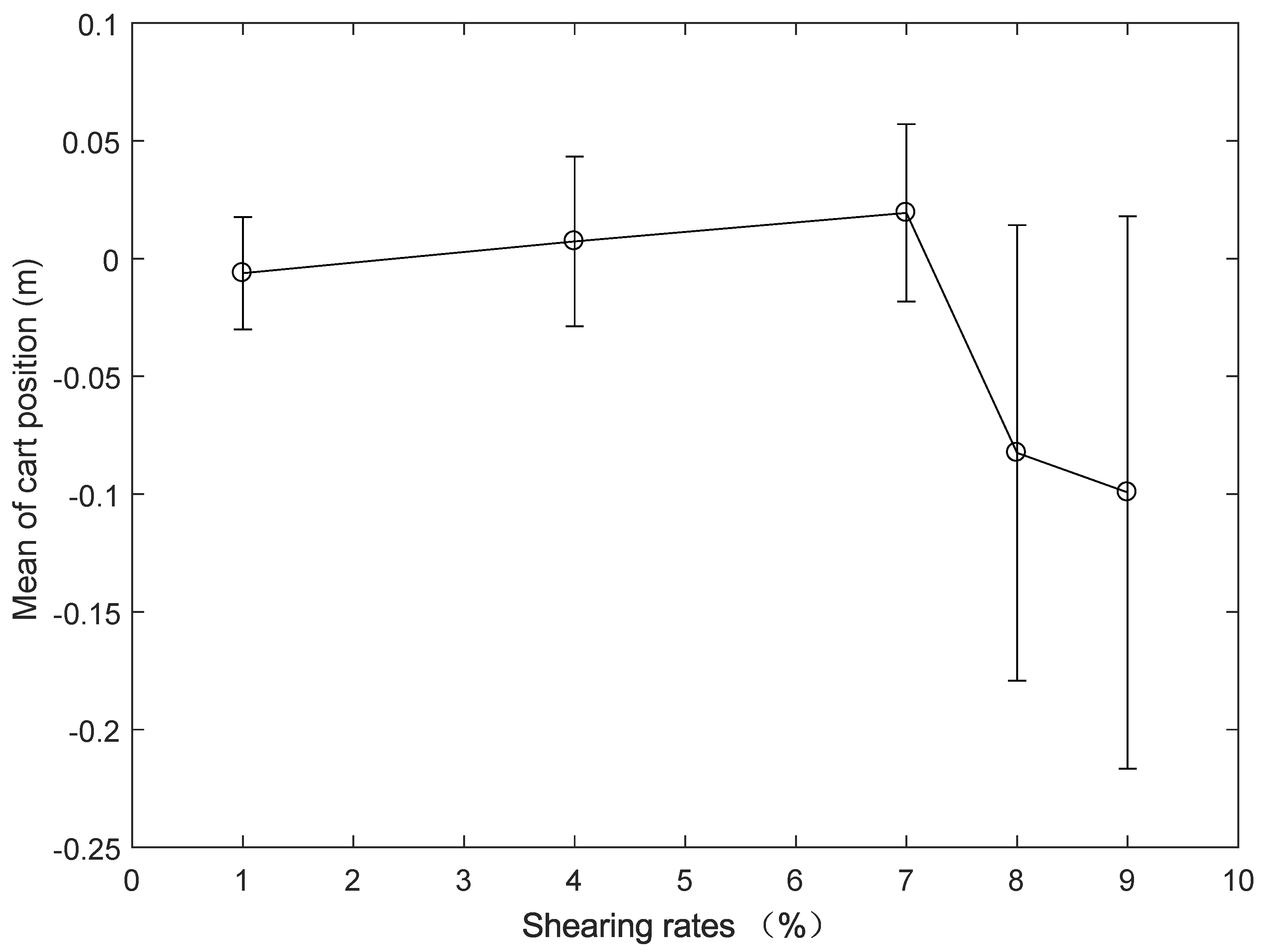
4.2.2. Analysis of the Influence of Shearing Attack on the Performance of NIPVSSs
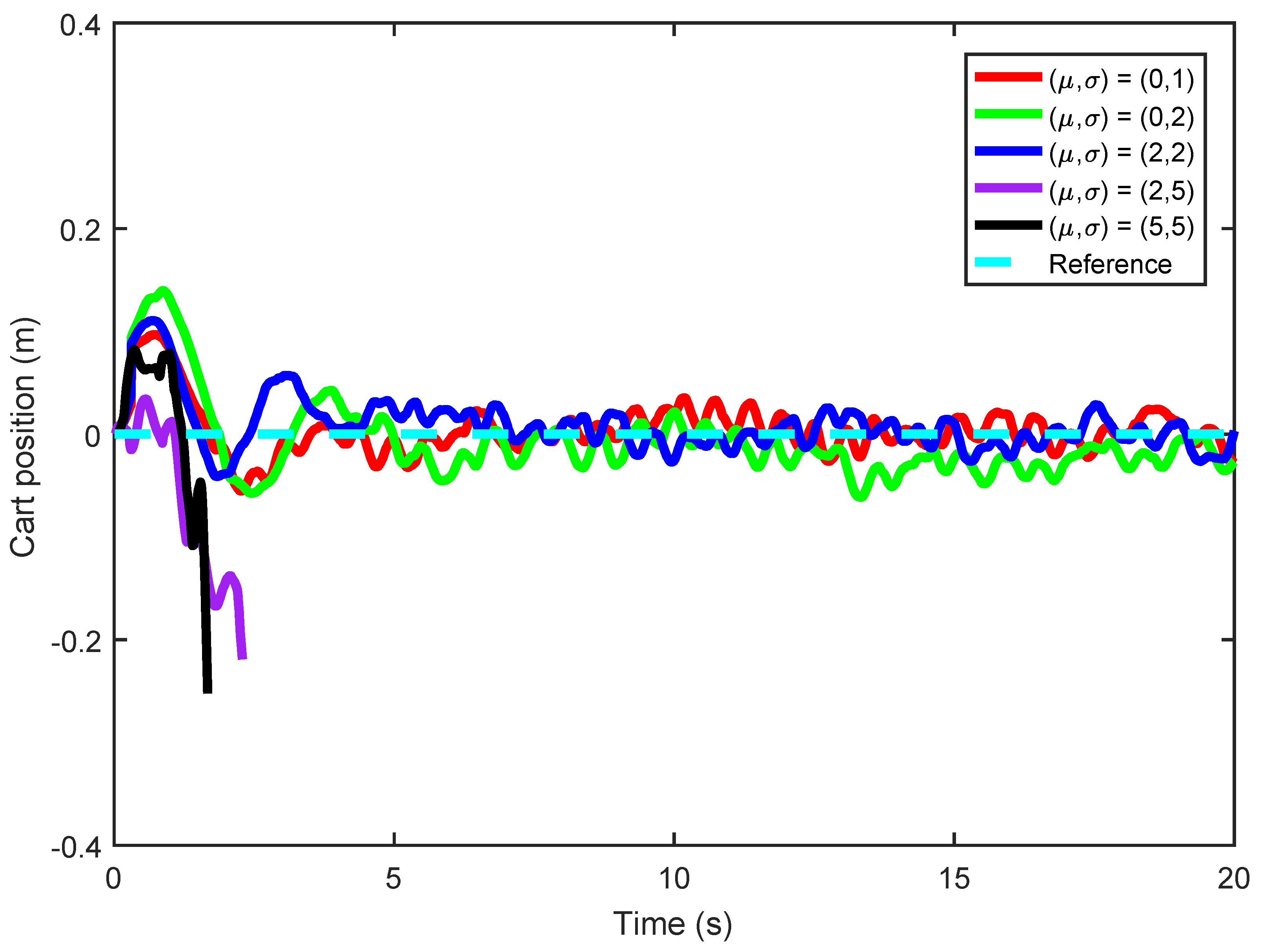
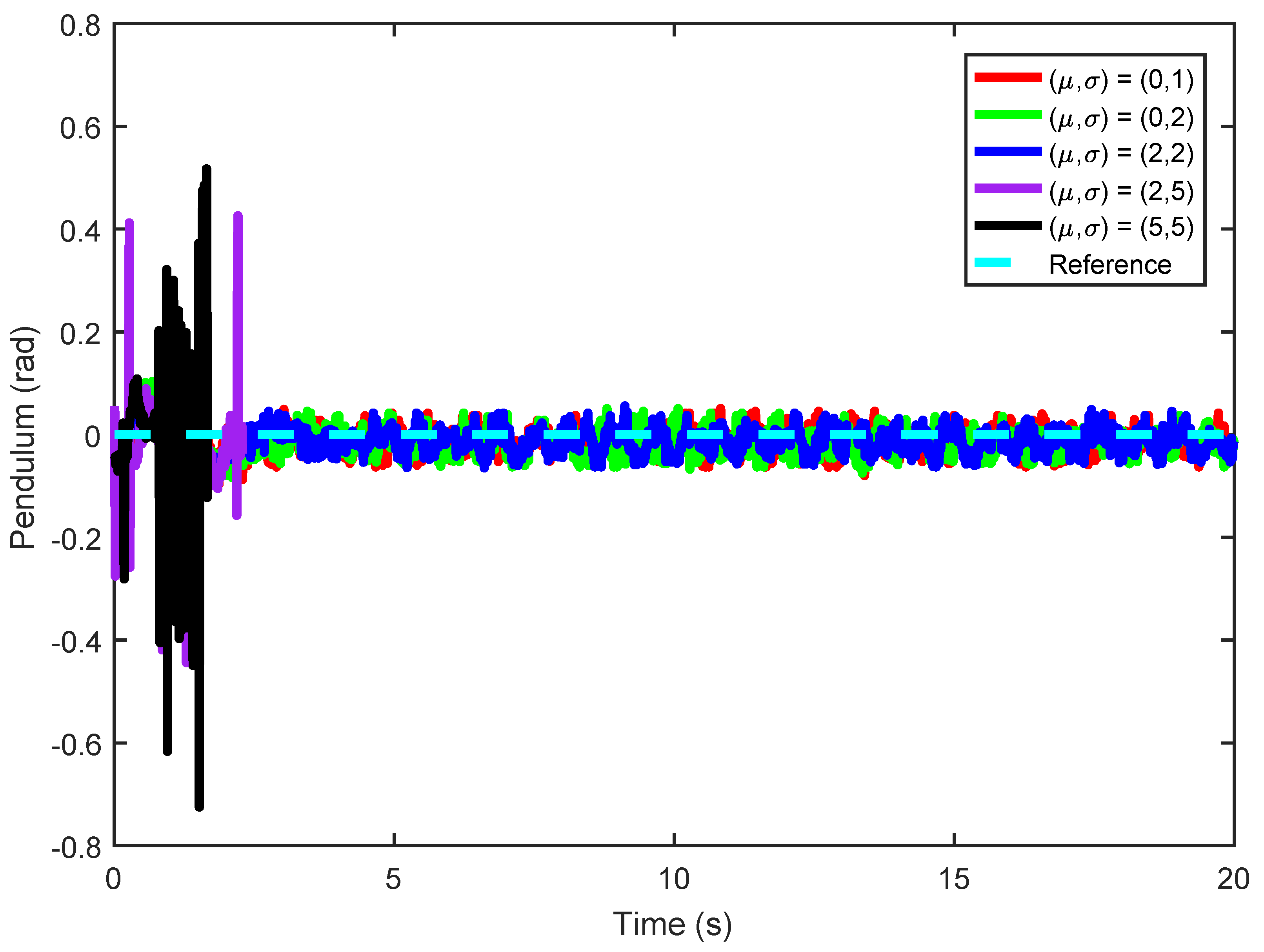
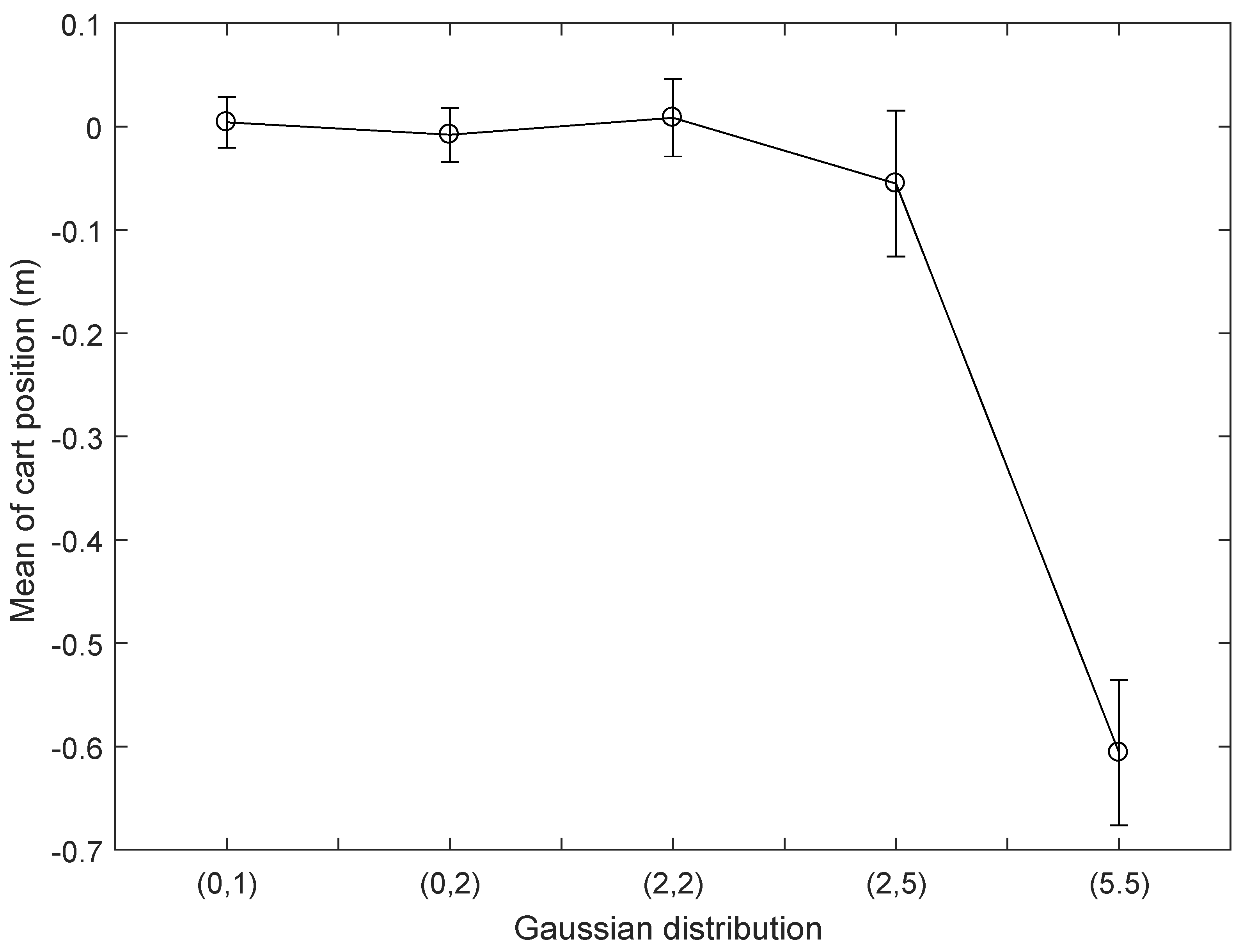
4.2.3. Analysis of the Influence of Gaussian Attack on the Performance of NIPVSSs
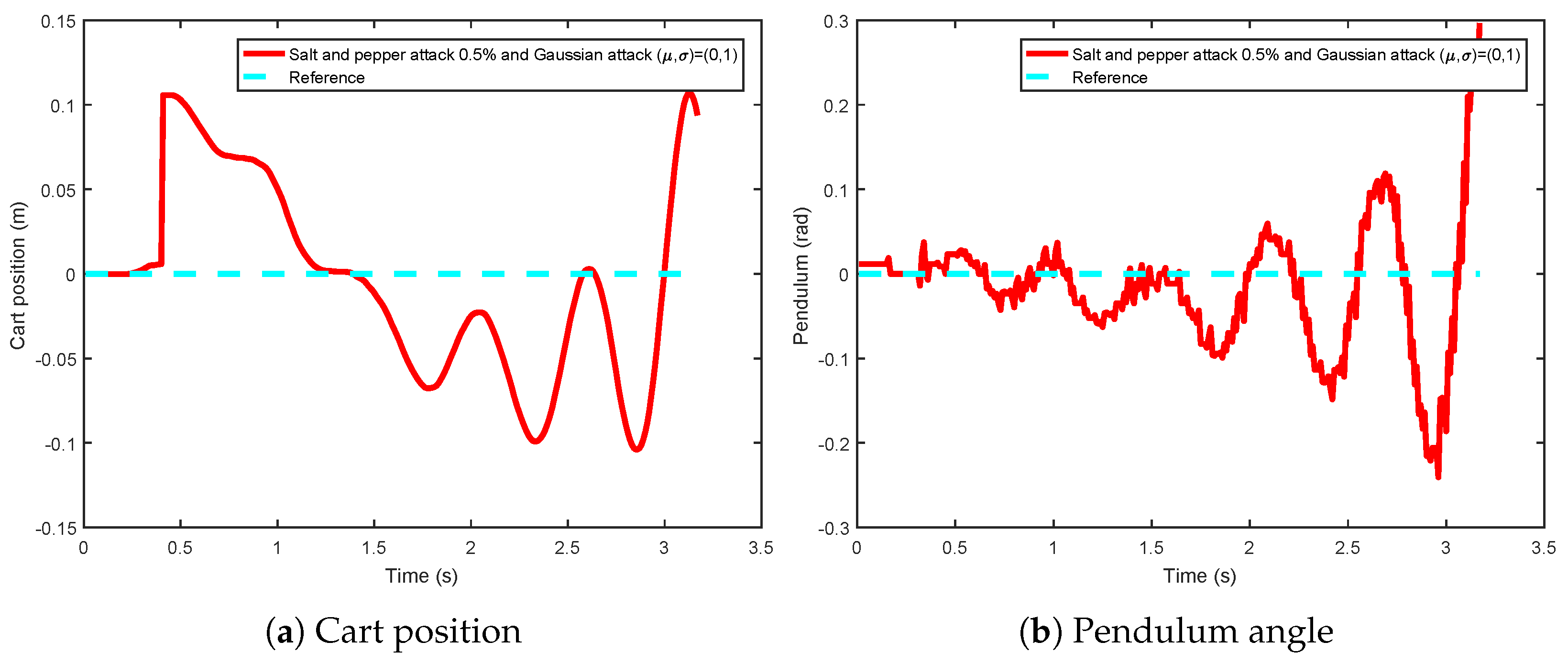
4.2.4. Analysis of the Influence of Salt and Pepper Attack and Gaussian Attack Simultaneously on the Performance of NIPVSSs
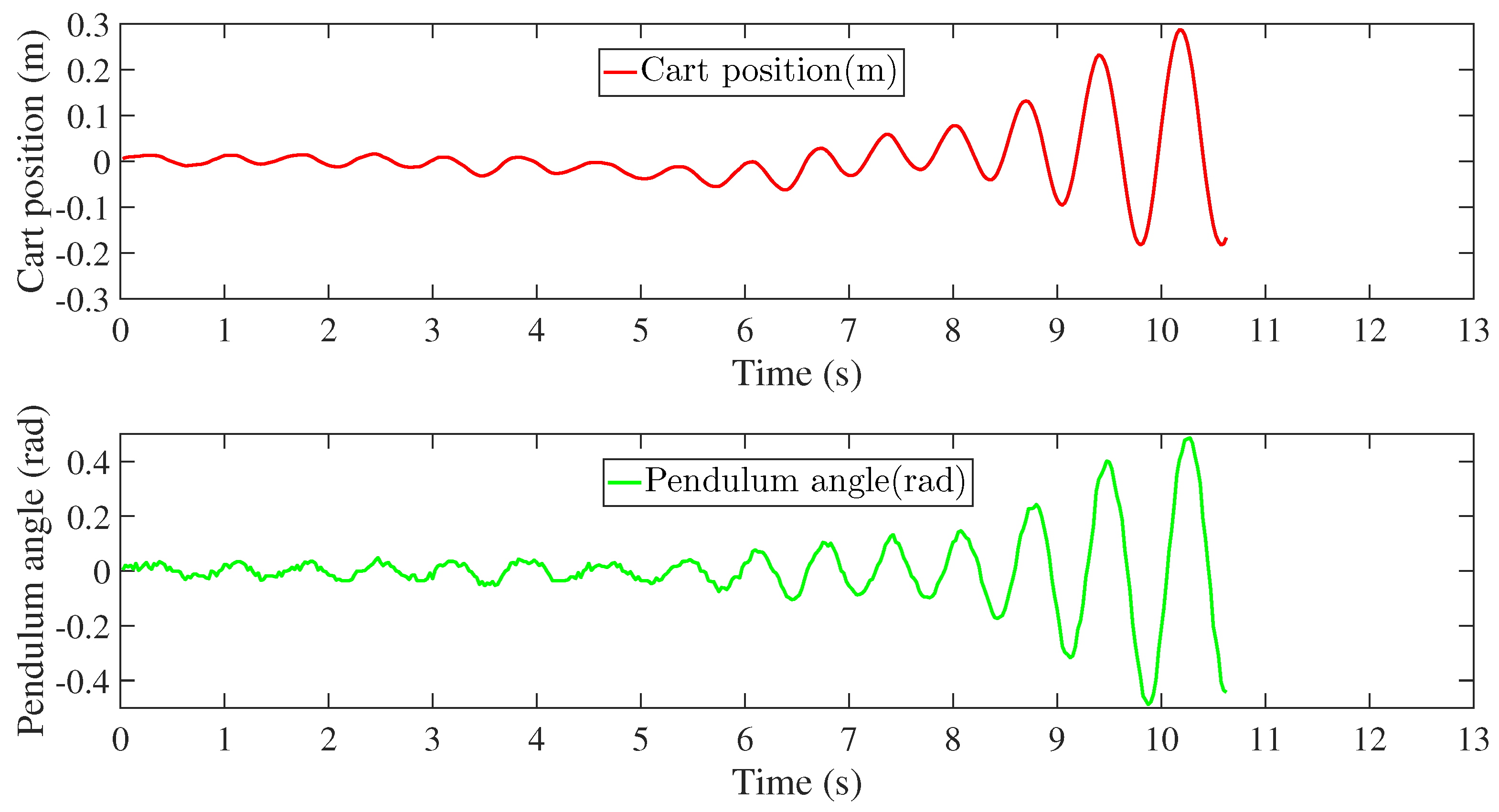
4.2.5. Comparison of Control [13], Sliding Mode Control [17] and the Proposed SIMO ADRC Control
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| NIPVSSs | Networked inverted pendulum visual servo systems |
| ADRC | Active Disturbance Rejection Control |
| ESO | Extended state observer |
| TD | Trace differentiator |
| NLSEF | Nonlinear state error feedback |
References
- Yang, X.; Zheng, X. Swing-Up and Stabilization Control Design for An Underactuated Rotary Inverted Pendulum System: Theory and Experiments. IEEE Trans. Ind. Electron. 2018, 65, 7229–7238. [Google Scholar] [CrossRef]
- Mondal, R.; Dey, J. Performance Analysis and Implementation of Fractional Order 2-DOF Control on Cart–Inverted Pendulum System. IEEE Trans. Ind. Appl. 2020, 56, 7055–7066. [Google Scholar] [CrossRef]
- Zhang, F.; Zhu, C.; Hou, X. Analysis of Swinging Method of Straight Inverted Pendulum. In Proceedings of the 2021 33rd Chinese Control and Decision Conference (CCDC), Kunming, China, 22–24 May 2021; pp. 4719–4723. [Google Scholar]
- Ashrafiuon, H.; Erwin, R. Sliding Mode Control of Underactuated Multibody Systems and Its Application to Shape Change Control. Int. J. Control 2008, 81, 1849–1858. [Google Scholar] [CrossRef]
- Kim, S.; Ryu, S.; Won, J.; Kim, H.S.; Seo, T. 2-Dimensional Dynamic Analysis of Inverted Pendulum Robot with Transformable Wheel for Overcoming Steps. IEEE Robot. Autom. Lett. 2022, 7, 921–927. [Google Scholar] [CrossRef]
- Chen, H.; Sun, N. Nonlinear Control of Underactuated Systems Subject to Both Actuated and Unactuated State Constraints with Experimental Verification. IEEE Trans. Ind. Electron. 2020, 67, 7702–7714. [Google Scholar] [CrossRef]
- Yang, X.; Wu, J.; Zhang, K.; Zhang, P.; Xie, C. Research on Machine Vision Based Networked Supervisory Control System. In Proceedings of the 2016 UKACC 11th International Conference on Control (CONTROL), Belfast, UK, 31 August–2 September 2016; pp. 1–6. [Google Scholar]
- Jun, Z.; Liu, G.P. Design and Implementation of Networked Real-time Control System with Image Processing Capability. In Proceedings of the 2014 UKACC International Conference on Control (CONTROL), Loughborough, UK, 9–11 July 2014; pp. 39–43. [Google Scholar]
- Shi, Y.; Shen, C.; Fang, H.; Li, H. Advanced Control in Marine Mechatronic Systems: A Survey. IEEE/ASM Trans. Mechatron. 2017, 22, 1121–1131. [Google Scholar] [CrossRef]
- Hill, J. Real Time Control of a Robot with a Mobile Camera. In Proceedings of the 9th International Symposium on Industrial Robots, Detroit, MI, USA, 13–15 March 1979; pp. 233–246. [Google Scholar]
- Zhang, J.; Fridman, E. Dynamic Event-Triggered Control of Networked Stochastic Systems with Scheduling Protocols. IEEE Trans. Autom. Control 2021, 66, 6139–6147. [Google Scholar] [CrossRef]
- Pang, Z.; Luo, W.; Liu, G.; Han, Q.-L. Observer-Based Incremental Predictive Control of Networked Multi-Agent Systems with Random Delays and Packet Dropouts. IEEE Trans. Circuits Syst. II Express Briefs 2021, 68, 426–430. [Google Scholar] [CrossRef]
- Du, D.; Zhang, C.; Song, Y.; Zhou, H.; Li, W. Real-Time H∞ Control of Networked Inverted Pendulum Visual Servo Systems. IEEE Trans. Cybern. 2020, 50, 5113–5126. [Google Scholar] [CrossRef]
- Du, D.; Wu, L.; Zhang, C.; Fei, Z.; Yang, L.; Fei, M.; Zhou, H. Co-Design Secure Control Based on Image Attack Detection and Data Compensation for Networked Visual Control Systems. IEEE Trans. Instrum. Meas. 2022, 71, 1–14. [Google Scholar] [CrossRef]
- Sun, W.; Su, S.; Xia, J.; Wu, Y. Adaptive Tracking Control of Wheeled Inverted Pendulums with Periodic Disturbances. IEEE Trans. Cybern. 2020, 50, 1867–1876. [Google Scholar] [CrossRef]
- Huang, J.; Ri, S.; Liu, L.; Wang, Y.; Kim, J.; Pak, G. Nonlinear Disturbance Observer-Based Dynamic Surface Control of Mobile Wheeled Inverted Pendulum. IEEE Trans. Control Syst. Technol. 2015, 23, 2400–2407. [Google Scholar] [CrossRef]
- Song, Y.; Du, D.; Zhou, H.; Fei, M. Sliding mode variable structure control for inverted pendulum visual servo systems. IFAC-PapersOnline 2019, 52, 262–267. [Google Scholar] [CrossRef]
- Wang, T.; Wu, J.; Wang, Y.; Ma, M. Adaptive Fuzzy Tracking Control for a Class of Strict-Feedback Nonlinear Systems with Time-Varying Input Delay and Full State Constraints. IEEE Trans. Fuzzy Syst. 2020, 28, 3432–3441. [Google Scholar] [CrossRef]
- Takahashi, N.; Sato, O.; Kono, M. Robust Control Method for the Inverted Pendulum System with Structured Uncertainty Caused by Measurement Error. Artif. Life Robot. 2009, 14, 574–577. [Google Scholar] [CrossRef]
- Li, J.; Qi, X.; Wan, H.; Xia, Y. Active Disturbance Rejection Control: Theoretical Results Summary and Future Researches. Control Theory Appl. 2017, 34, 281–295. [Google Scholar]
- Wang, H.; Lu, Q.; Tian, Y.; Christov, N. Fuzzy Sliding Mode Based Active Disturbance Rejection Control for Active Suspension System. Proc. Inst. Mech. Eng. Part D-J. Automob. Eng. 2020, 234, 449–457. [Google Scholar] [CrossRef]
- Tao, J.; Sun, Q.; Tan, P.; Chen, Z.; He, Y. Active Disturbance Rejection Control (ADRC)-Based Autonomous Homing Control of Powered Parafoils. Nonlinear Dyn. 2016, 86, 1461–1476. [Google Scholar] [CrossRef]
- Wang, C.; Quan, L.; Zhang, S.; Meng, H.; Lan, Y. Reduced-Order Model Based Active Disturbance Rejection Control of Hydraulic Servo System with Singular Value Perturbation Theory. ISA Trans. 2017, 67, 455–465. [Google Scholar] [CrossRef]
- Wang, Z.; Hu, C.; Zhu, Y.; He, S.; Yang, K.; Zhang, M. Neural Network Learning Adaptive Robust Control of An Industrial Linear Motor-Driven Stage with Disturbance Rejection Ability. IEEE Trans. Ind. Inf. 2017, 13, 2172–2183. [Google Scholar] [CrossRef]
- Xing, R.; Du, D.; Zhang, C. An Novel Selective Image Encryption Algorithm for Networked Visual Inverted Pendulum. IFAC-PapersOnLine 2020, 53, 379–384. [Google Scholar] [CrossRef]
- Lu, Q.; Du, D.; Zhang, C.; Fei, M.; Rakic, A. Guaranteed Cost Control of Networked Inverted Pendulum Visual Servo System with Computational Errors and Multiple Time-Varying Delays. Commun. Comput. Inf. Sci. 2021, 1469, 583–592. [Google Scholar]
- Han, J. From PID to Active Disturbance Rejection Control. IEEE Trans. Ind. Electron. 2009, 56, 900–906. [Google Scholar] [CrossRef]
- Jin, H.; Liu, L.; Lan, W. On Stability Condition of Linear Active Disturbance Rejection Control for Second-order Systems. Acta Autom. Sin. 2018, 44, 1725–1728. [Google Scholar]
- Li, J.; Qi, X.; Xia, Y.; Gao, Z. On Linear/Nonlinear Active Disturbance Rejection Switching Control. Acta Autom. Sin. 2016, 42, 202–212. [Google Scholar]
- Gao, Q.; Chen, S.; Li, Y. Application of LADRC on Inverted Pendulum System. Electri. Drive 2014, 44, 49–53. [Google Scholar]
- Zhou, R.; Han, W.; Tan, W. On Applicability and Tuning of Linear Active Disturbance Rejection Control. Control Theory Appl. 2018, 35, 1654–1662. [Google Scholar]
- Park, G.; Lee, C.; Shim, H.; Eun, Y.; Johansson, K. Stealthy Adversaries Against Uncertain Cyber-Physical Systems: Threat of Robust Zero-Dynamics Attack. IEEE Trans. Autom. Control 2019, 64, 4907–4919. [Google Scholar] [CrossRef]
- Shao, X.; Wang, H. Performance Analysis on Linear Extended State Observer and Its Extension Case with Higher Extended Order. Control Decis. 2015, 30, 815–822. [Google Scholar]
- Ji, P.; Ma, F.; Min, F. Terminal Traction Control of Teleoperation Manipulator with Random Jitter Disturbance Based on Active Disturbance Rejection Sliding Mode Control. IEEE Access 2020, 8, 220246–220262. [Google Scholar] [CrossRef]
- Du, B.; Wu, S.; Han, S.; Cui, S. Application of Linear Active Disturbance Rejection Controller for Sensorless Control of Internal Permanent-Magnet Synchronous Motor. IEEE Trans. Ind. Electron. 2016, 63, 3019–3027. [Google Scholar] [CrossRef]
- Han, J. Active Disturbance Rejection Control Technique—The Technique for Estimating and Compensating the Uncertainties, 1st ed.; National Defense Industry Press: Beijing, China, 2008. [Google Scholar]
- Yang, G.; Yao, J.; Dong, Z. Neuroadaptive learning algorithm for constrained nonlinear systems with disturbance rejection. Int. J. Robust Nonliear Control 2022, 32, 6127–6147. [Google Scholar] [CrossRef]
- Yang, G.; Zhu, T.; Yang, F.; Cui, L. Output feedback adaptive RISE control for uncertain nonlinear systems. Asian J. Control, 2022; early view. [Google Scholar] [CrossRef]
- Yang, G.; Yao, J. Multilayer neuroadaptive force control of electro-hydraulic load simulators with uncertainty rejection. Appl. Soft Comput. 2022, 130, 109672. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| New ESO | |||
| Traditional ESO |
| Links | ESO Link | NLSEF Link |
|---|---|---|
| Parameters | , , , | , , , , |
| Intensities of Salt and Pepper Attack | 0.5% | 0.9% | 1.3% | 1.4% | 1.5% |
|---|---|---|---|---|---|
| MCP (m) | 0.0036 | 0.0150 | 0.0276 | 0.1097 | 0.1168 |
| SCP (m) | 0.0366 | 0.0397 | 0.0424 | 0.1338 | 0.1638 |
| MPA (rad) | −0.0121 | −0.0124 | −0.0124 | 0.0458 | 0.0564 |
| MPA (rad) | 0.0214 | 0.0245 | 0.0247 | 0.0865 | 0.1029 |
| Shearing Rate | 1% | 4% | 7% | 8% | 9% |
|---|---|---|---|---|---|
| MCP (m) | −0.0062 | 0.0073 | 0.0194 | −0.0825 | −0.0993 |
| SCP (m) | 0.0239 | 0.0360 | 0.0377 | 0.0967 | 0.1173 |
| MPA (rad) | −0.0105 | −0.0127 | −0.0129 | 0.0424 | 0.0467 |
| MPA (rad) | 0.0257 | 0.0284 | 0.0366 | 0.0756 | 0.0790 |
| (0,1) | (0,2) | (2,2) | (2,5) | (5,5) | |
|---|---|---|---|---|---|
| MCP (m) | 0.0041 | -0.0079 | 0.0085 | −0.0552 | −0.0606 |
| SCP (m) | 0.0246 | 0.0260 | 0.0374 | 0.0707 | 0.0705 |
| MPA (rad) | −0.0126 | −0.0128 | −0.0145 | 0.0106 | 0.0162 |
| MPA (rad) | 0.0252 | 0.0256 | 0.0280 | 0.0811 | 0.1750 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, D.; Lu, Q. Secure Control of Networked Inverted Pendulum Visual Servo Systems Based on Active Disturbance Rejection Control. Actuators 2022, 11, 355. https://doi.org/10.3390/act11120355
Wu D, Lu Q. Secure Control of Networked Inverted Pendulum Visual Servo Systems Based on Active Disturbance Rejection Control. Actuators. 2022; 11(12):355. https://doi.org/10.3390/act11120355
Chicago/Turabian StyleWu, Dakui, and Qianjiang Lu. 2022. "Secure Control of Networked Inverted Pendulum Visual Servo Systems Based on Active Disturbance Rejection Control" Actuators 11, no. 12: 355. https://doi.org/10.3390/act11120355
APA StyleWu, D., & Lu, Q. (2022). Secure Control of Networked Inverted Pendulum Visual Servo Systems Based on Active Disturbance Rejection Control. Actuators, 11(12), 355. https://doi.org/10.3390/act11120355