

Effects of Flexural Rigidity on Soft Actuators via Adhering to Large Cylinders



Abstract
1. Introduction
2. Design and FEMs of the SPAA
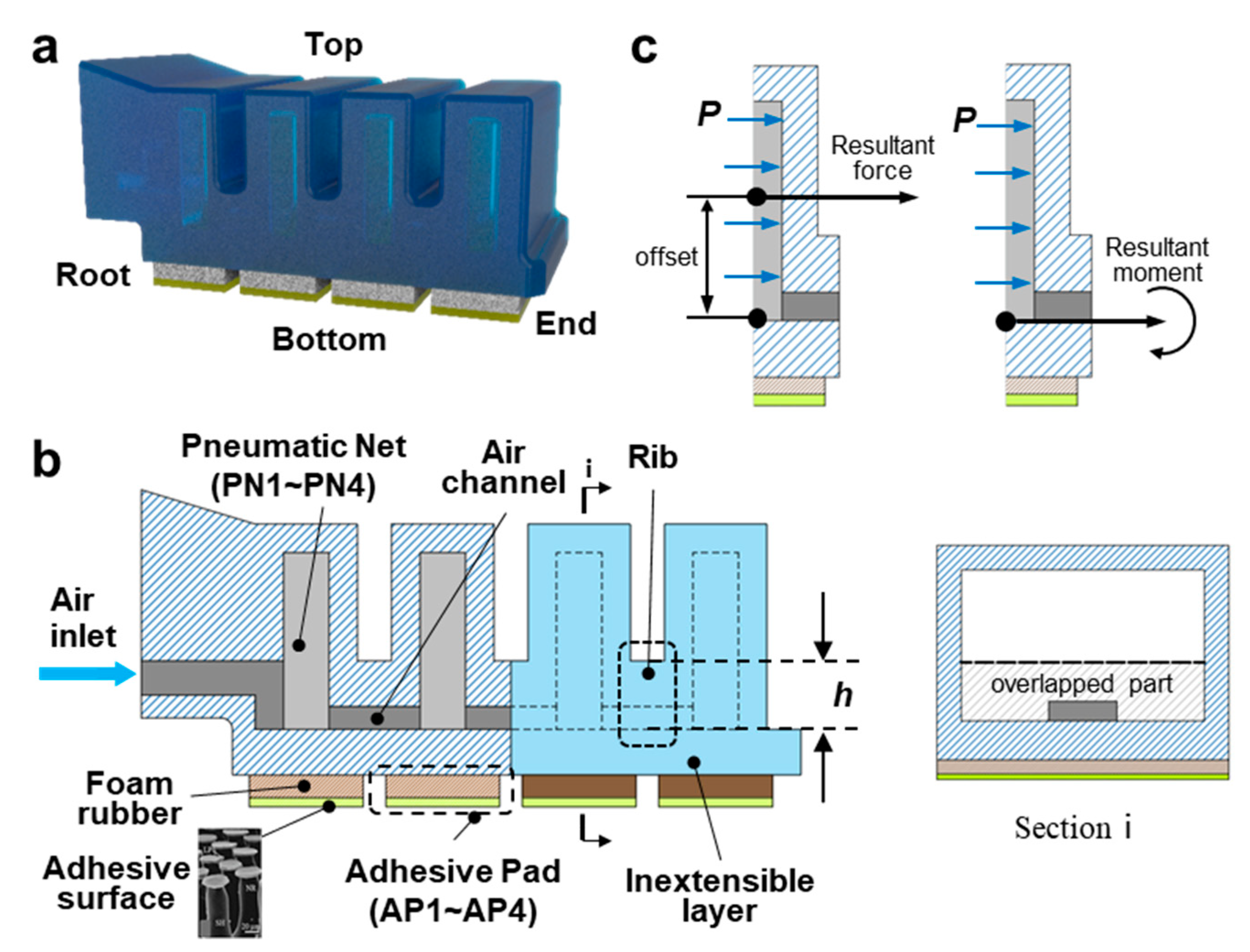
2.1. Design of the SPAA
2.2. FEMs of the Bending Curvature and Flexural Rigidity
3. Experimental Setup for Characterizing the Performance of the SPAA
3.1. Fabrication of the SPAA
3.2. Setup of the Synchronous Testing Platform
4. Results
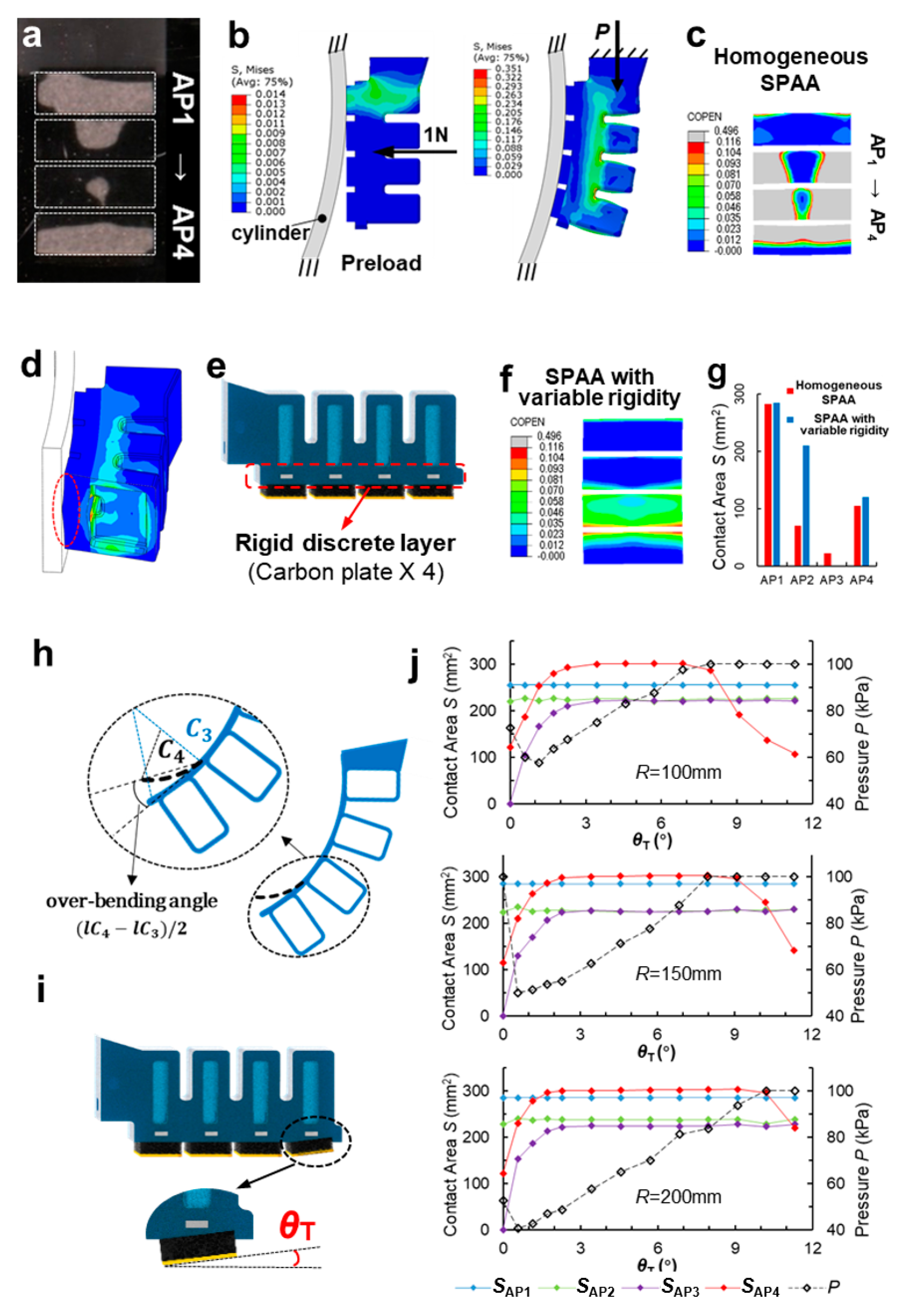
4.1. Bending Curvature and Flexural Rigidity
4.2. Contact State and Mechanical Properties
4.3. Adhesion-Peeling Performance on Large Cylinders
5. Discussion
5.1. Comparison between the SPAA and Other Adhesive Units
5.2. Optimization for High Contact Ratio
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Laschi, C.; Mazzolai, B.; Cianchetti, M. Soft robotics: Technologies and systems pushing the boundaries of robot abilities. Sci. Robot. 2016, 1, eaah3690. [Google Scholar] [CrossRef]
- Shintake, J.; Cacucciolo, V.; Floreano, D.; Shea, H. Soft robotic grippers. Adv. Mater. 2018, 30, e1707035. [Google Scholar] [CrossRef]
- Hawkes, E.W.; Jiang, H.; Christensen, D.L.; Han, A.K.; Cutkosky, M.R. Grasping without squeezing: Design and modeling of shear-activated grippers. IEEE Trans. Robot. 2017, 34, 303–316. [Google Scholar] [CrossRef]
- Brown, E.; Rodenberg, N.; Amend, J.; Mozeika, A.; Steltz, E.; Zakin, M.R.; Lipson, H.; Jaeger, H.M. Universal robotic gripper based on the jamming of granular material. Proc. Natl. Acad. Sci. USA 2010, 107, 18809–18814. [Google Scholar] [CrossRef]
- Alizadehyazdi, V.; Bonthron, M.; Spenko, M. An electrostatic/gecko-inspired adhesives soft robotic gripper. IEEE Robot. Autom. Lett. 2020, 5, 4679–4686. [Google Scholar] [CrossRef]
- Tao, D.; Gao, X.; Lu, H.; Liu, Z.; Li, Y.; Tong, H.; Pesika, N.; Meng, Y.; Tian, Y. Controllable anisotropic dry adhesion in vacuum: Gecko inspired wedged surface fabricated with ultraprecision diamond cutting. Adv. Funct. Mater. 2017, 27, 1606576. [Google Scholar] [CrossRef]
- Modabberifar, M.; Spenko, M. A shape memory alloy-actuated gecko-inspired robotic gripper. Sens. Actuators A Phys. 2018, 276, 76–82. [Google Scholar] [CrossRef]
- Modabberifar, M.; Spenko, M. Development of a gecko-like robotic gripper using Scott–Russell mechanisms. Robotica 2020, 38, 541–549. [Google Scholar] [CrossRef]
- Dadkhah, M.; Zhao, Z.; Wettels, N.; Spenko, M. A self-aligning gripper using an electrostatic/gecko-like adhesive. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016. [Google Scholar]
- Ruotolo, W.; Brouwer, D.; Cutkosky, M.R. From grasping to manipulation with gecko-inspired adhesives on a multifinger gripper. Sci. Robot. 2021, 6, eabi9773. [Google Scholar] [CrossRef]
- Hashizume, J.; Huh, T.M.; Suresh, S.A.; Cutkosky, M.R. Capacitive sensing for a gripper with gecko-inspired adhesive film. IEEE Robot. Autom. Lett. 2019, 4, 677–683. [Google Scholar] [CrossRef]
- Hawkes, E.W.; Christensen, D.L.; Han, A.K.; Jiang, H.; Cutkosky, M.R. Grasping without squeezing: Shear adhesion gripper with fibrillar thin film. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015. [Google Scholar]
- Glick, P.; Suresh, S.A.; Ruffatto, D.; Cutkosky, M.; Tolley, M.T.; Parness, A. A soft robotic gripper with gecko-inspired adhesive. IEEE Robot. Autom. Lett. 2018, 3, 903–910. [Google Scholar] [CrossRef]
- Hoang, T.T.; Quek, J.J.S.; Thai, M.T.; Phan, P.T.; Lovell, N.H.; Do, T.N. Soft robotic fabric gripper with gecko adhesion and variable stiffness. Sens. Actuators A Phys. 2021, 323, 112673. [Google Scholar] [CrossRef]
- Li, L.; Liu, Z.; Zhou, M.; Li, X.; Meng, Y.; Tian, Y. Structures. Flexible adhesion control by modulating backing stiffness based on jamming of granular materials. Smart Mater. Struct. 2019, 28, 115023. [Google Scholar] [CrossRef]
- Song, S.; Sitti, M. Soft grippers using micro-fibrillar adhesives for transfer printing. Adv. Mater. 2014, 26, 4901–4906. [Google Scholar] [CrossRef]
- Song, S.; Majidi, C.; Sitti, M. Geckogripper: A soft, inflatable robotic gripper using gecko-inspired elastomer micro-fiber adhesives. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014. [Google Scholar]
- Minsky, H.K.; Turner, K.T. Achieving enhanced and tunable adhesion via composite posts. Appl. Phys. Lett. 2015, 106, 201604. [Google Scholar] [CrossRef]
- Jiang, Q.; Wang, L.; Weng, Z.; Wang, Z.; Dai, Z.; Chen, W. Effect of the structural characteristics on attachment-detachment mechanics of a rigid-flexible coupling adhesive unit. Biomimetics 2022, 7, 119. [Google Scholar] [CrossRef]
- Hao, Y.; Gong, Z.; Xie, Z.; Guan, S.; Yang, X.; Wang, T.; Wen, L. A soft bionic gripper with variable effective length. J. Bionic Eng. 2018, 15, 220–235. [Google Scholar] [CrossRef]
- Alici, G.; Canty, T.; Mutlu, R.; Hu, W.; Sencadas, V. Modeling and experimental evaluation of bending behavior of soft pneumatic actuators made of discrete actuation chambers. Soft Robot. 2018, 5, 24–35. [Google Scholar] [CrossRef]
- Mosadegh, B.; Polygerinos, P.; Keplinger, C.; Wennstedt, S.; Shepherd, R.F.; Gupta, U.; Shim, J.; Bertoldi, K.; Walsh, C.J.; Whitesides, G.M. Pneumatic Networks for Soft Robotics that Actuate Rapidly. Adv. Funct. Mater. 2014, 24, 2163–2170. [Google Scholar] [CrossRef]
- Carbone, G.; Pierro, E.; Gorb, S.N. Origin of the superior adhesive performance of mushroom-shaped microstructured surfaces. Soft Matter 2011, 7, 5545–5552. [Google Scholar] [CrossRef]
- Zhang, L.; Wang, L.; Weng, Z.; Yuan, Q.; Ji, K.; Wang, Z. Fabrication of flexible multi-cavity bio-inspired adhesive unit using laminated mold pouring. Machines 2022, 10, 184. [Google Scholar] [CrossRef]
- Wang, H.; Zhao, F.; Hu, W. Numerical simulation of quasi-static compression on a complex rubber foam. Acta Mech. Solida Sin. 2017, 30, 285–290. [Google Scholar] [CrossRef]
- Yap, Y.L.; Sing, S.L.; Yeong, W.Y. A review of 3D printing processes and materials for soft robotics. Rapid Prototyp. J. 2020, 26, 1345–1361. [Google Scholar] [CrossRef]
- Eason, E.V.; Hawkes, E.W.; Windheim, M.; Christensen, D.L.; Libby, T.; Cutkosky, M.R. Biomimetics. Stress distribution and contact area measurements of a gecko toe using a high-resolution tactile sensor. Bioinspir. Biomim. 2015, 10, 016013. [Google Scholar] [CrossRef]
- Chu, Z.; Deng, J.; Su, L.; Cui, J.; Sun, F. A gecko-inspired adhesive robotic end effector for critical-contact manipulation. Sci. China Inf. Sci. 2022, 65, 182203. [Google Scholar] [CrossRef]
- Marchese, A.D.; Katzschmann, R.; Rus, D.L. A recipe for soft fluidic elastomer robots. Soft Robot. 2015, 2, 7–25. [Google Scholar] [CrossRef]
- Acome, E.; Mitchell, S.K.; Morrissey, T.G.; Emmett, M.B.; Benjamin, C.; King, M.; Radakovitz, M.; Keplinger, C. Hydraulically amplified self-healing electrostatic actuators with muscle-like performance. Science 2018, 359, 61–65. [Google Scholar] [CrossRef]
- Wehner, M.; Truby, R.L.; Fitzgerald, D.J.; Mosadegh, B.; Whitesides, G.M.; Lewis, J.A.; Wood, R.J. An integrated design and fabrication strategy for entirely soft, autonomous robots. Nature 2016, 536, 451–455. [Google Scholar] [CrossRef]
- Kim, Y.; Yuk, H.; Zhao, R.; Chester, S.A.; Zhao, X. Printing ferromagnetic domains for untethered fast-transforming soft materials. Nature 2018, 558, 274–279. [Google Scholar] [CrossRef]
- Park, S.-J.; Gazzola, M.; Park, K.S.; Park, S.; Di Santo, V.; Blevins, E.L.; Lind, J.U.; Campbell, P.H.; Dauth, S.; Capulli, A.K.; et al. Phototactic guidance of a tissue-engineered soft-robotic ray. Science 2016, 353, 158–162. [Google Scholar] [CrossRef]
- Hirano, D.; Tanishima, N.; Bylard, A.; Chen, T.G. Underactuated gecko adhesive gripper for simple and versatile grasp. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020. [Google Scholar]
- Hu, Q.; Dong, E.; Sun, D. Soft gripper design based on the integration of flat dry adhesive, soft actuator, and microspine. IEEE Trans. Robot. 2021, 37, 1065–1080. [Google Scholar] [CrossRef]
- Tvergaard, V.; Hutchinson, J.W. Effect of strain dependent cohesive zone model on predictions of interface crack growth. J. Phys. Colloq. 1996, 6, C6-165–C6-172. [Google Scholar] [CrossRef]
- Tian, Y.; Wan, J.; Pesika, N.; Zhou, M. Bridging nanocontacts to macroscale gecko adhesion by sliding soft lamellar skin supported setal array. Sci. Rep. 2013, 3, 1382. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Soft Adhesive Gripper | Actuating Technology | Single Unit Size (mm) | Detach Force (N)/ Detach Angle (°)/ Radium (mm) |
|---|---|---|---|
| [13] | Fluidic–elastic actuator (rubber) | 60 ∗ 20 | 18/≈60/75 9.5/≈75/101.5 |
| [14] | Fluidic–elastic actuator (fabric) | 35 ∗ 24 | 4.3/90/14 |
| [5] | Under-actuated | ≈35 ∗ 100 | 5.5/≈45/100 12/≈55/150 |
| [34] | Under-actuated | 50 ∗ 32 | 5.5/≈45/100 3.5/≈60/200 1.8/≈80/400 |
| [35] | Shape memory alloy-actuated | 100 ∗ 15 | 10/0/62.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, L.; Jiang, Q.; Weng, Z.; Yuan, Q.; Wang, Z. Effects of Flexural Rigidity on Soft Actuators via Adhering to Large Cylinders. Actuators 2022, 11, 286. https://doi.org/10.3390/act11100286
Wang L, Jiang Q, Weng Z, Yuan Q, Wang Z. Effects of Flexural Rigidity on Soft Actuators via Adhering to Large Cylinders. Actuators. 2022; 11(10):286. https://doi.org/10.3390/act11100286
Chicago/Turabian StyleWang, Liuwei, Qijun Jiang, Zhiyuan Weng, Qingsong Yuan, and Zhouyi Wang. 2022. "Effects of Flexural Rigidity on Soft Actuators via Adhering to Large Cylinders" Actuators 11, no. 10: 286. https://doi.org/10.3390/act11100286
APA StyleWang, L., Jiang, Q., Weng, Z., Yuan, Q., & Wang, Z. (2022). Effects of Flexural Rigidity on Soft Actuators via Adhering to Large Cylinders. Actuators, 11(10), 286. https://doi.org/10.3390/act11100286