1. Introduction
Three-phase machines, such as motors and generators, are used extensively in industry and in civil engineering. Renewable energy sources, machine tools, servo drives, and robots are just a few examples. Because of its low cost, minimal maintenance, low moment of inertia, robust architecture, and operational reliability, IM has become widely employed in various applications as power electronics technology has advanced. In the last two decades, the FOC technique has been the most widely used method for regulating IM in high-performance applications, such as speed and position control of three-phase motors. The torque and flux control current commands for the IM are decoupled by using the FOC method. As a result, the machine is controlled as if it were an independent DC machine. However, uncertainties such as unexpected parameter variations, external load disturbances, and nonlinear dynamics continue to impact the IM’s control performance. The Proportional Integral (PI) regulator, due to its simplicity, clear functionality, and effectiveness, is one of the most popular control techniques which has been used in electrical machines [
1]. Nonetheless, because the IM is a nonlinear framework, a well-designed nonlinear regulator can improve action in the presence of disturbances and uncertainty [
2]. Many authors have taken use of different advanced control approaches to govern the power electronics and drives area in this regard. For instance, adaptive control method [
3], Backstepping algorithm [
4,
5], predictive control method [
6] and Sliding Mode Control (SMC) [
7,
8,
9]. Among the nonlinear control method, the SMC technique has become a fascinating nonlinear control method with a particular dynamic performance for IM, such as strong robustness, quick response, and simple software and hardware implementation [
10].
Almost ever since sliding mode ideas imply, the considerable noise which some of the sliding mode controllers expose is not pleasant for control engineers and sometimes has led to resentments and even rejection of the technique. The phenomenon is best known as chattering. Chattering is a high-frequency oscillation around the equilibrium point, which arises because of the discontinuous nature of the control action. Due to this, the well-designed control action stands unsuitable for many practical applications. This behavior creates a problem of wear and tear within the mechanical parts, vibrations within the machines, or flapping of wing vanes in aerospace and hitting effect. Hence, it is unwanted in light of implementation [
11]. Regarding chattering suppression, various types of chattering prevention schemes have been suggested [
12,
13,
14]. For instance, many authors have been designing regulators for IM based on combining SMC theory and other advanced control methods such as backstepping algorithm, adaptive method, and fuzzy technique [
15,
16,
17]. It should be noted that using SMC by employing other sorts of nonlinear control strategies increments the controller complexity and computational endeavors, which is incompatible with the ease of SMC. Another solution could be applying higher order sliding mode control to IM. For instance, in [
18], authors have taken advantage of the super-twisting sliding mode method to eliminate the chattering phenomenon. Furthermore, discrete-time sliding mode control has been applied to the machine in this regard [
19,
20].
Another way to reduce the chattering phenomenon is to apply some changes to the traditional sliding surface, which is basically based on error and its derivative signal [
21]. In [
21,
22,
23,
24], an integral sliding surface has been applied to the IM to eliminate steady-state error, which has been named ISMC. A sensorless adaptive ISMC for IM has been discussed in [
21]. In [
22], a speed estimator based on the ISMC method for IM has been designed where stator current controllers consist of a PI and an ISMC controller, which means more complexity. Besides, this speed estimator is not universal and can only be implemented in conjunction with the above current controller. Furthermore, the authors in [
23] designed an ISMC anti-windup in the speed control loop of the IM. Furthermore, an ISMC method has been proposed in [
24] to start the sensorless IM in the rotating condition.
In this paper, the considered IM is under load torque and it is perturbed by model uncertainties. The common objective in nearly all industrial control design procedures is to provide a fast and accurate response by employing a smooth and effective electromagnetic torque. This goal will be achieved by designing an efficient control law. The idea is to regulate the mechanical rotor speed of IM by using ISMC method to achieve asymptotic speed tracking and disturbance rejection. In the controller design process, the FOC theory has been applied to get fast dynamic performance. Furthermore, to tackle the chattering problem and to eliminate the steady-state error, the proposed robust controller is designed based on the ISMC while using a continuous switching function . Besides, the proposed controller has a faster speed convergence rate compared to the conventional ISMC method, due to the surface design difference. Compared with the conventional ISMC, in this paper, the function of the error of the mechanical speed has been considered in the surface design. By employing this function, the control action becomes smoother and provides a faster dynamics. Additionally, the presented proposal offers good robustness under parametric uncertainties. Then, by using a Lyapunov-based approach, robust output tracking of rotor speed is achieved. Since most of the electric drives in the industry are controlled by PI regulators, this proposal also has been compared with the PI controller to demonstrate the ability of the proposed controller in fast convergence of the speed of the IM. Furthermore, worth noting that, in this work, the experiments have been done by use of a kW commercial IM, which shows the applicability of the projected methodology for the real applications within the industry.
The paper has been organized as follows: the speed controller of IM is designed in
Section 2. In
Section 3, the experiment platform and the effectiveness of the proposed controller by employing several simulations and experimental tests are shown. Finally, in
Section 4, the conclusion has been presented.
3. Simulation and Experimental Design
In this section, the experimental platform and the performance of the proposed speed regulation has been verified by means of MatLab/Simulink simulation and real tests using a commercial induction motor.
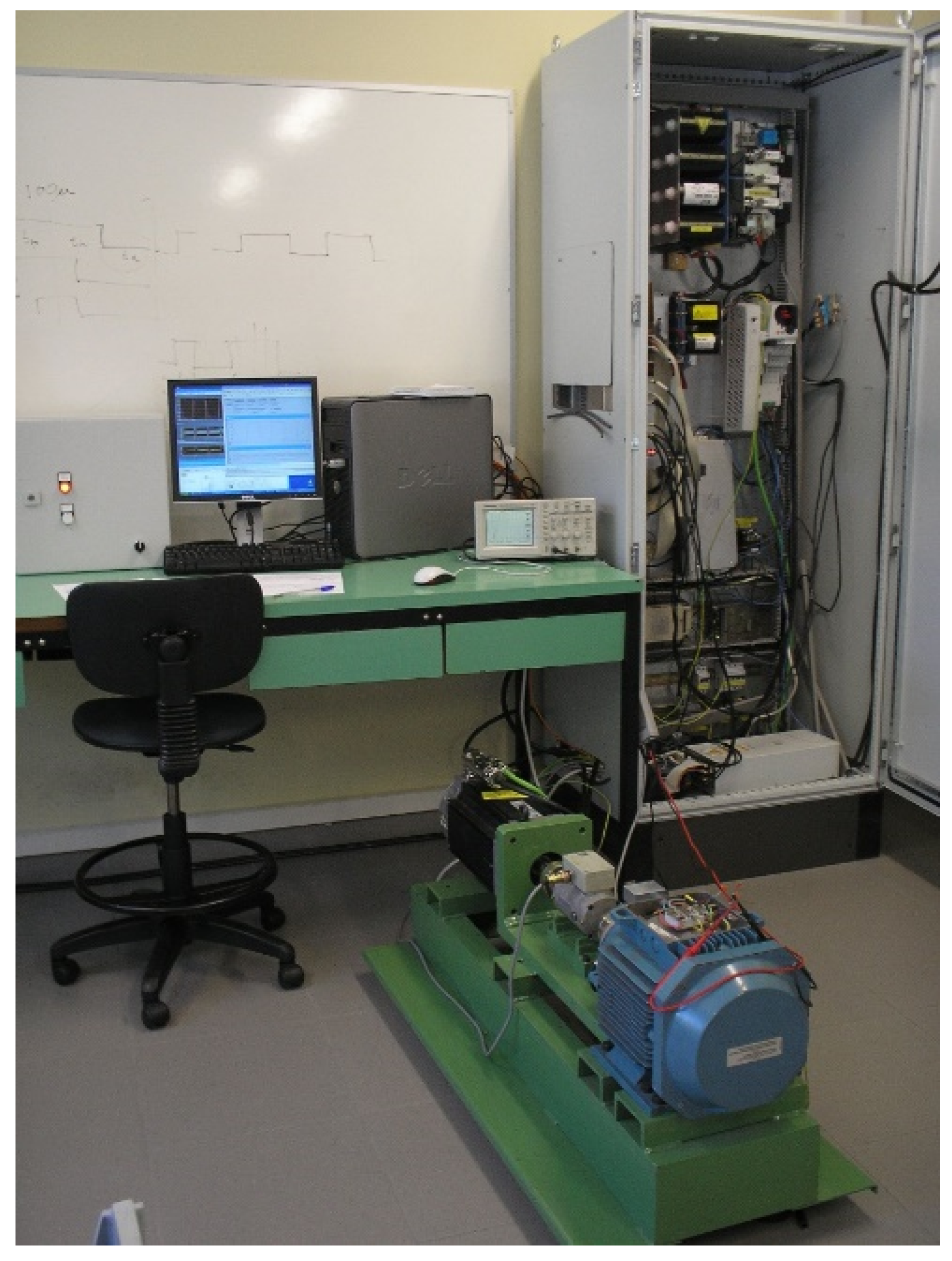
The experimental validation of proposed ISMC regulators has been carried out by means of the platform shown in
Figure 2. This platform is based on a commercial squirrel-cage IM of
kW (M2AA 132M4, ABB) which is connected mechanically to a synchronous AC servo motor of
kW (190U2, Unimotor) in its shaft, to implement the load torque (controlled by torque).
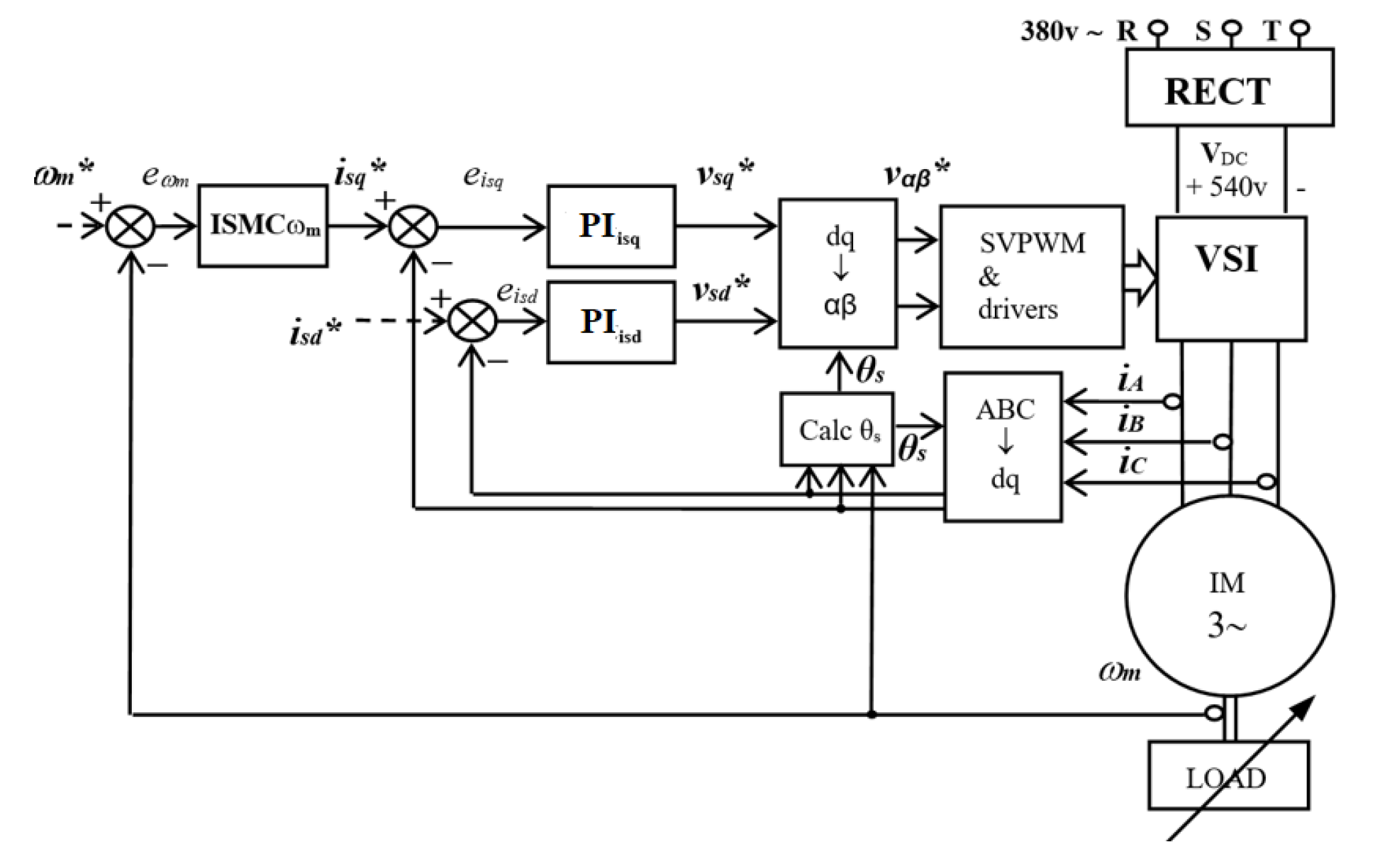
Table 1, shows the parameters of the IM installed in the experiment platform. Both machines are connected to a DC bus of 540 V by using their respective three-phase Voltage Source Inverters (VSI) with a switching frequency of 10 kHz (SVPWM modulator frequency). This way, the control and monitoring tasks are done from a Personal Computer, which contains the MatLab/Simulink software and dSControl application to control the DS1103 controller board real-time interface of dSpace. The mechanical speed of the machine is calculated by using a FPGA module and the measurements of an incremental encoder of 4096 impulses per revolution.
Three different design cases such as D1, D2 and PI have been applied to the same induction motor to validate the proposed enhanced regulator (D2 design). To run the experiments, the IM is using the values of the nominal parameters for the IM, which have been listed in
Table 1, and the IM has been tested at three different speeds. Furthermore, parameters values of the ISMC speed regulator are:
and
. On the other hand, the uncertainty test takes a moment of inertia which is
lower than the nominal value (J = 0.0201 kg·m
), while the rest of the machine parameters will be nominal values, then these parameters are
and
. Regarding the adjustment of the two PI current regulators, both have been tuned by using a bandwidth of 3000 rad/s and a phase margin of 90 (
) [
27]. The mechanical speed PI regulator which is employed to compare with the enhanced ISMC speed regulator (D2 design), have been tuned taking a bandwidth of 300 rad/s and a margin phase of 82 (
). This way as faster as possible dynamics have been obtained experimentally by using PI regulators.
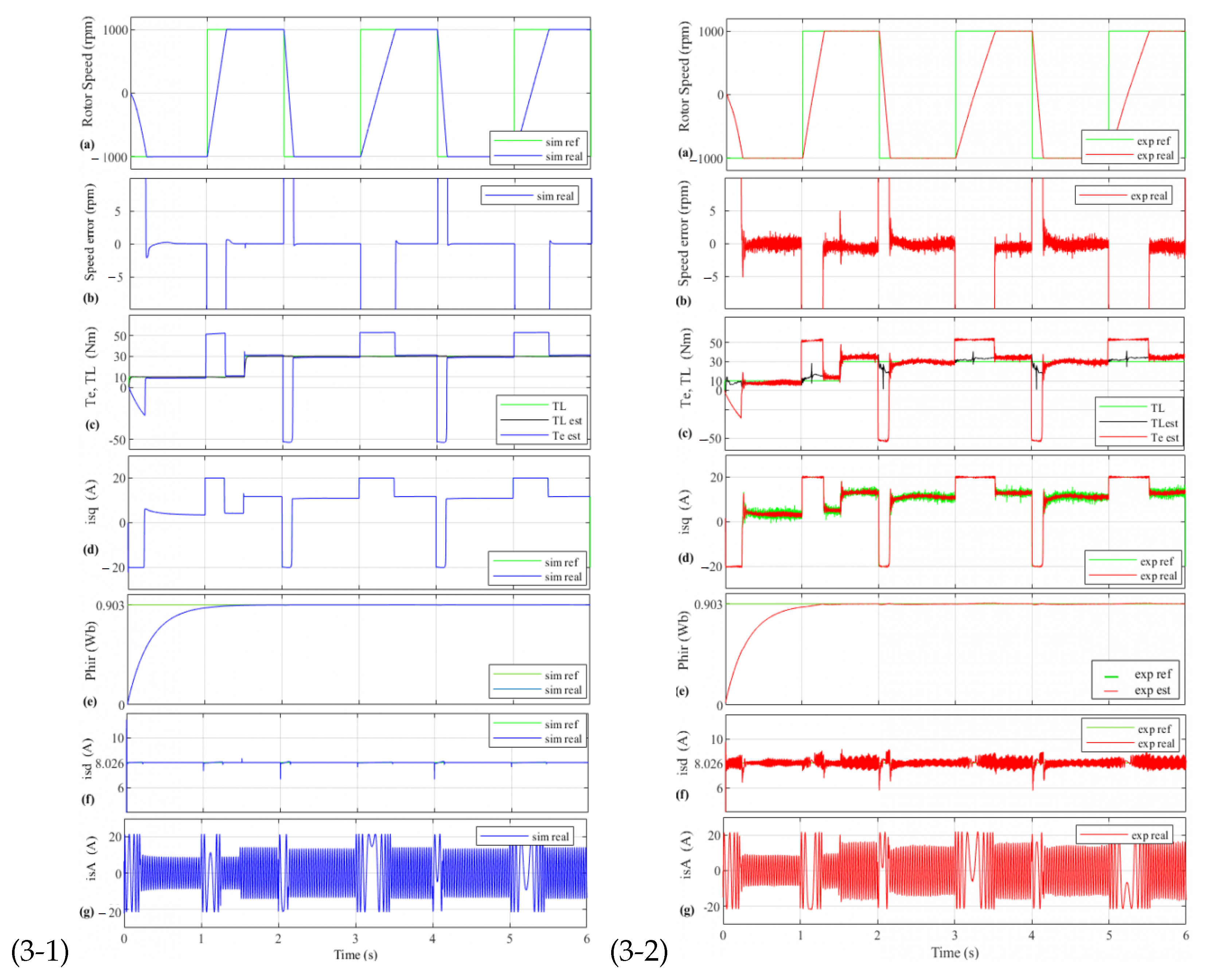
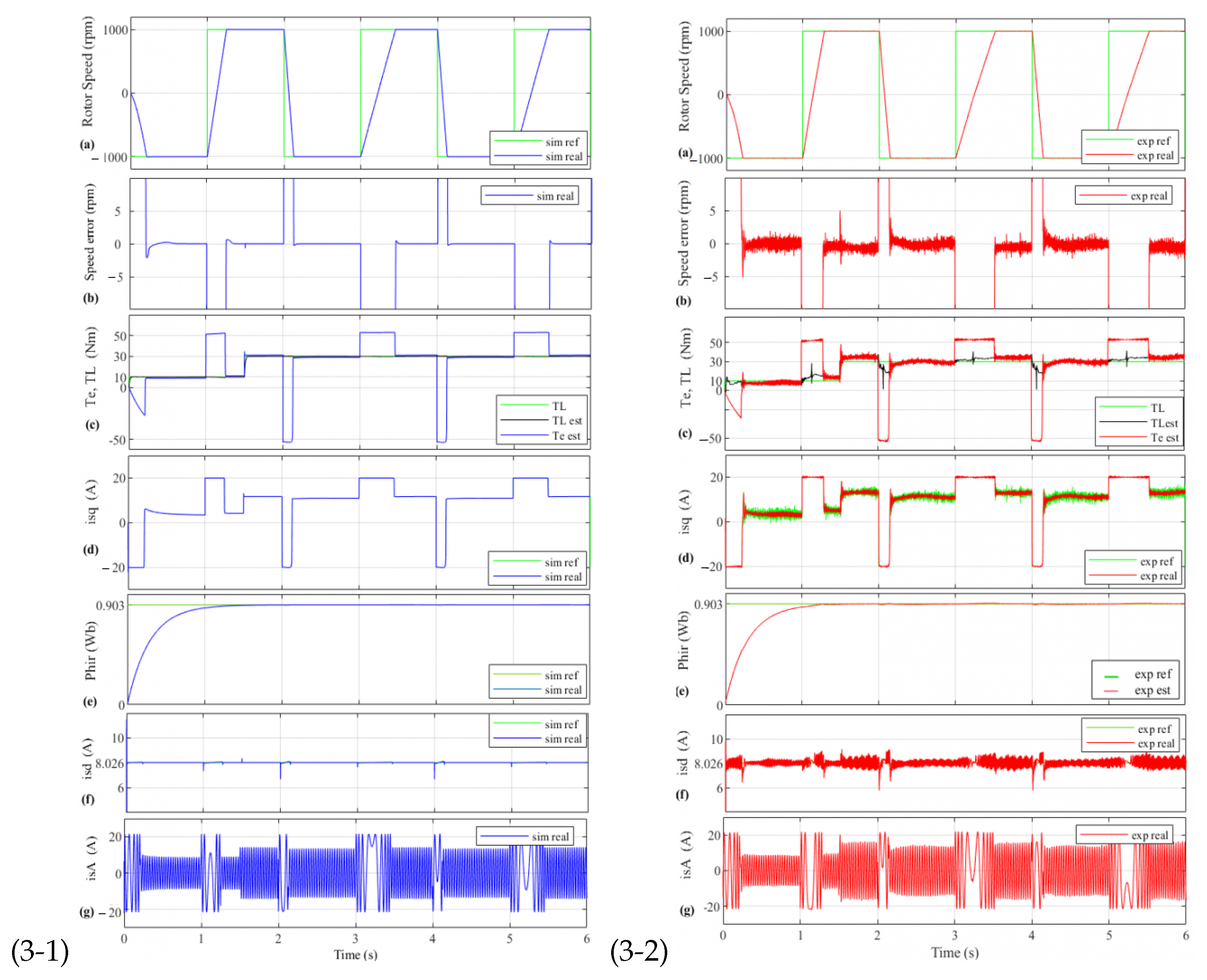
Figure 3(3-1) shows the performance of the machine by using a simulation test when the motor is working with a square speed reference of 1000 rpm with a period of 2 s, and the load torque is applied to the system in two steps: 10 Nm at the starting point and 30 nm at
s. In the first graph, (a), the reference and real rotor speed can be observed, and the second graph (b), shows the rotor speed error. As it can be seen, in the presence of a sudden change in the load torque the mechanical rotor speed tracks the desired speed properly with low error in steady-state (less than 1 rpm). The third graph, (c), shows the electromagnetic torque and load torque, where it can be appreciated that electromagnetic torque is smooth and consequently does not present any chattering. In (d) graph it can be seen that the stator torque current tracks the reference correctly. Moreover, this current is proportional to the electromagnetic torque which is also smooth and limited to its rated value (20 A). Graph (e) shows how the rotor flux tracks its reference adequately. Furthermore, the good response of the rotor flux current can be presented as graph (f). Finally, as the torque current is limited, the stator currents are also limited to a similar value that has been shown in the (g), keeping protected the stator windings against over-currents.
Figure 3(3-2) shows the performance of the machine by using the corresponding experimental test to the simulation test shown in
Figure 3(3-1). In the
Figure 3(3-2), the graphs (a) and (b) show that the speed tracking and the accuracy are very similar to the simulation case, getting fast dynamics and speed error in steady-state is less than 2 rpm. Regarding the electromagnetic torque (c), it can be compared with its simulation case, concluding that both are very similar, smooth, and efficient. Moreover, the estimated load torque is very similar to the load torque, which that demonstrates the estimator works properly. Graph (d) shows the reference and the real stator torque currents, which can be observed that the current tracking is very satisfactory and very similar to the simulation case (the form is proportional to the electromagnetic torque and limited to 20 A). In
Figure 3(3-2), e and f graphs show how the rotor flux and rotor flux current adequately track their references. It can be observed that the two stator currents,
and
are decoupled. Finally, due to the limited torque current, the stator currents are also limited to similar values (g). By comparing simulation and experimental case in
Figure 3, it can be seen that the simulation and the platform experiment have the same behavior, which is proof of the experimental validation of the presented ISMC speed controller (D2 design) and good system modeling.
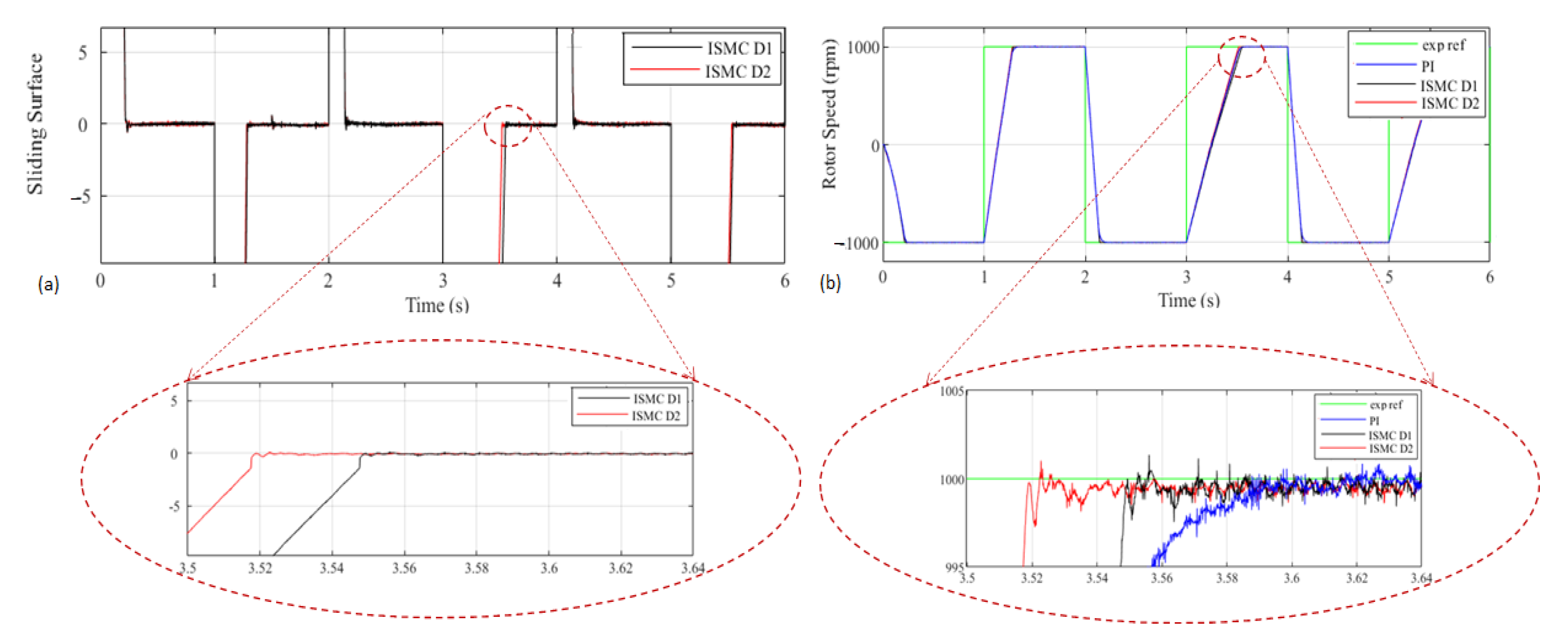
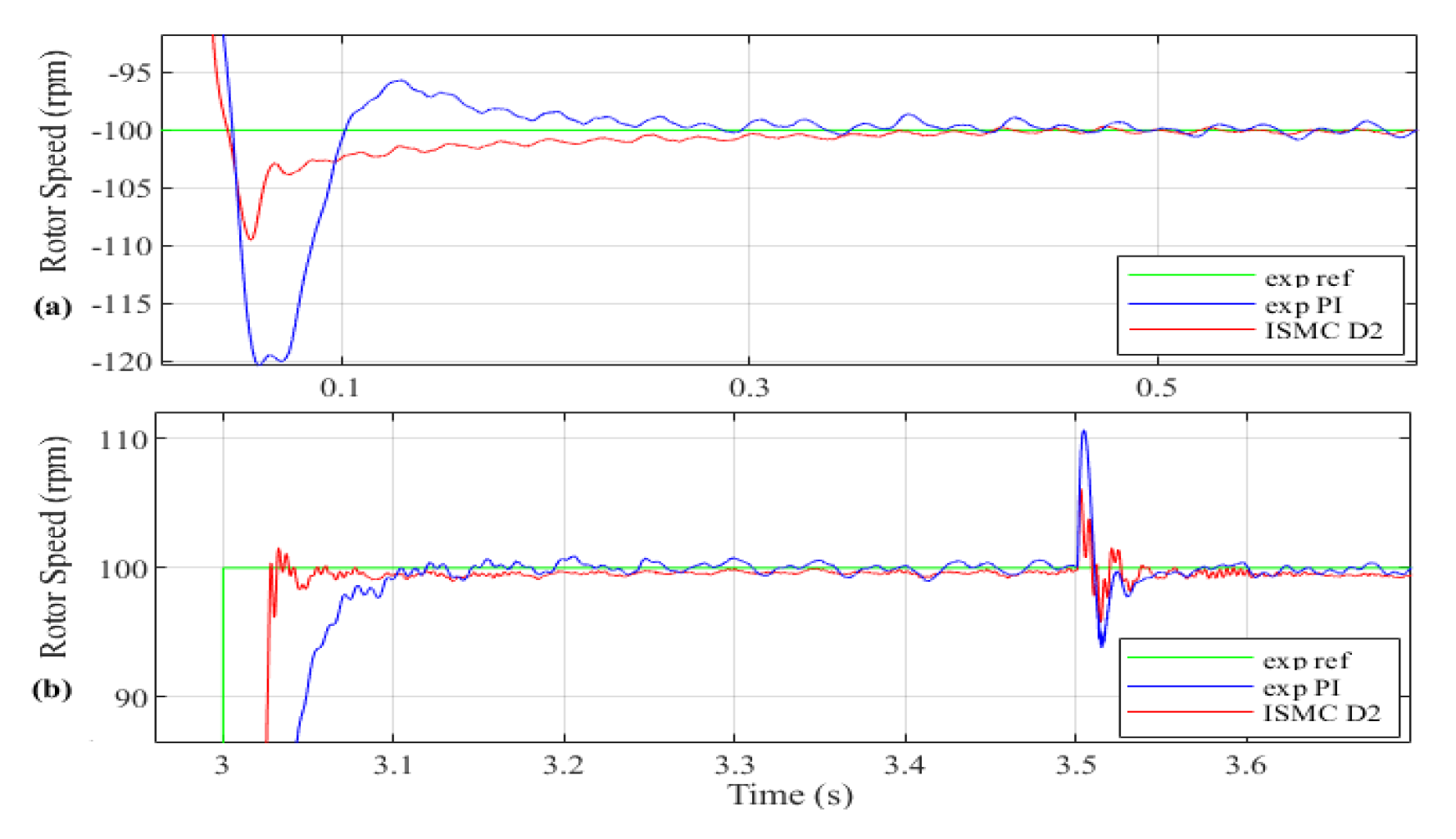
Figure 4 shows the experimental tests for performance comparison between the proposed ISMC speed controller (D2 design) and the conventional ISMC (D1 design) method by using the same speed and load conditions in the test of
Figure 3. This illustration provides the sliding surface convergence and tracking speed performance for both controllers. It is evident in the zoom mode graphs that using the
function of the speed error, instead of the
function, in the surface design, provides faster error convergence to zero. Moreover, the PI speed regulator performance is also added to show that despite its performance being good its response is slower than the other two ISMC (D1 and D2 designs).
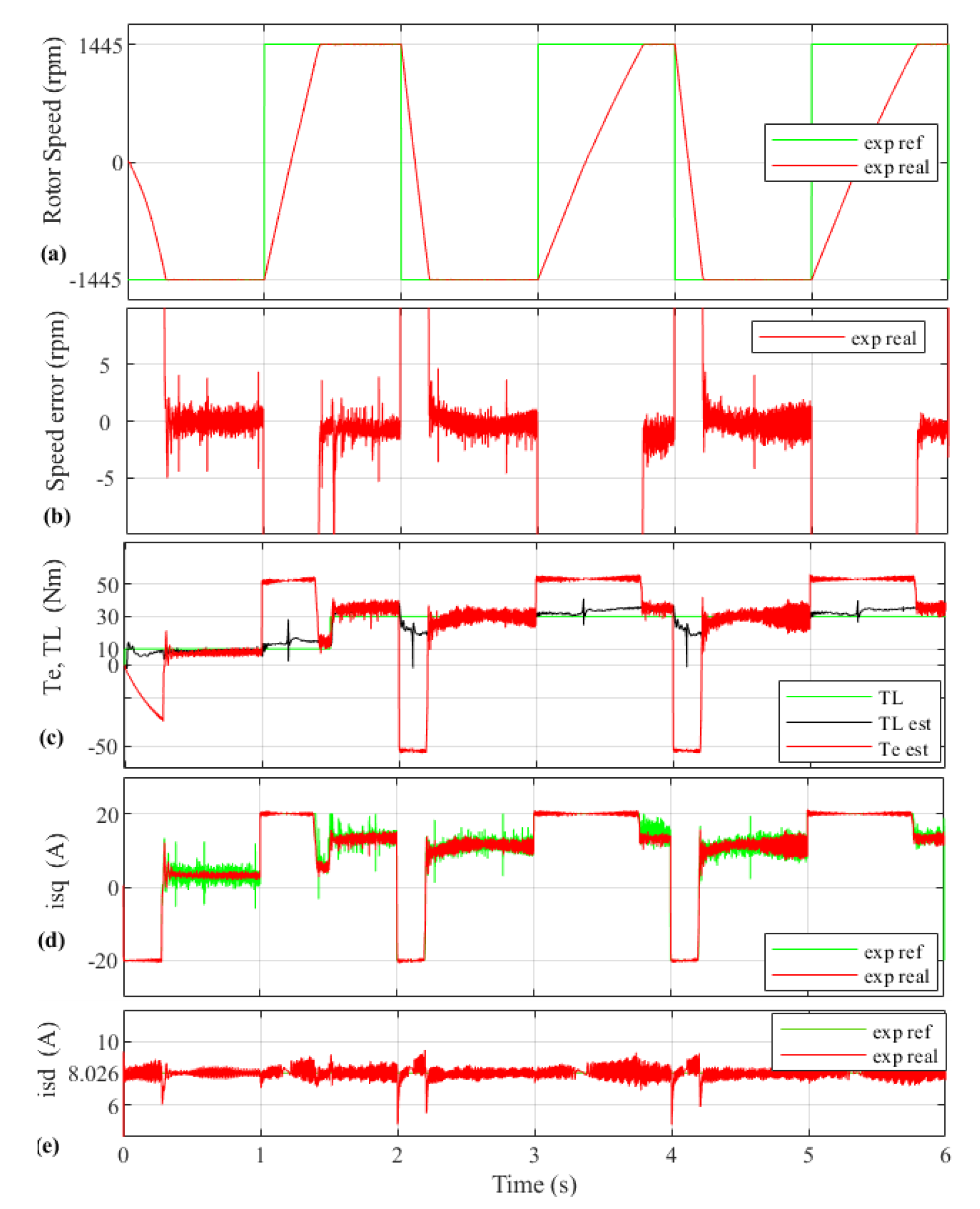
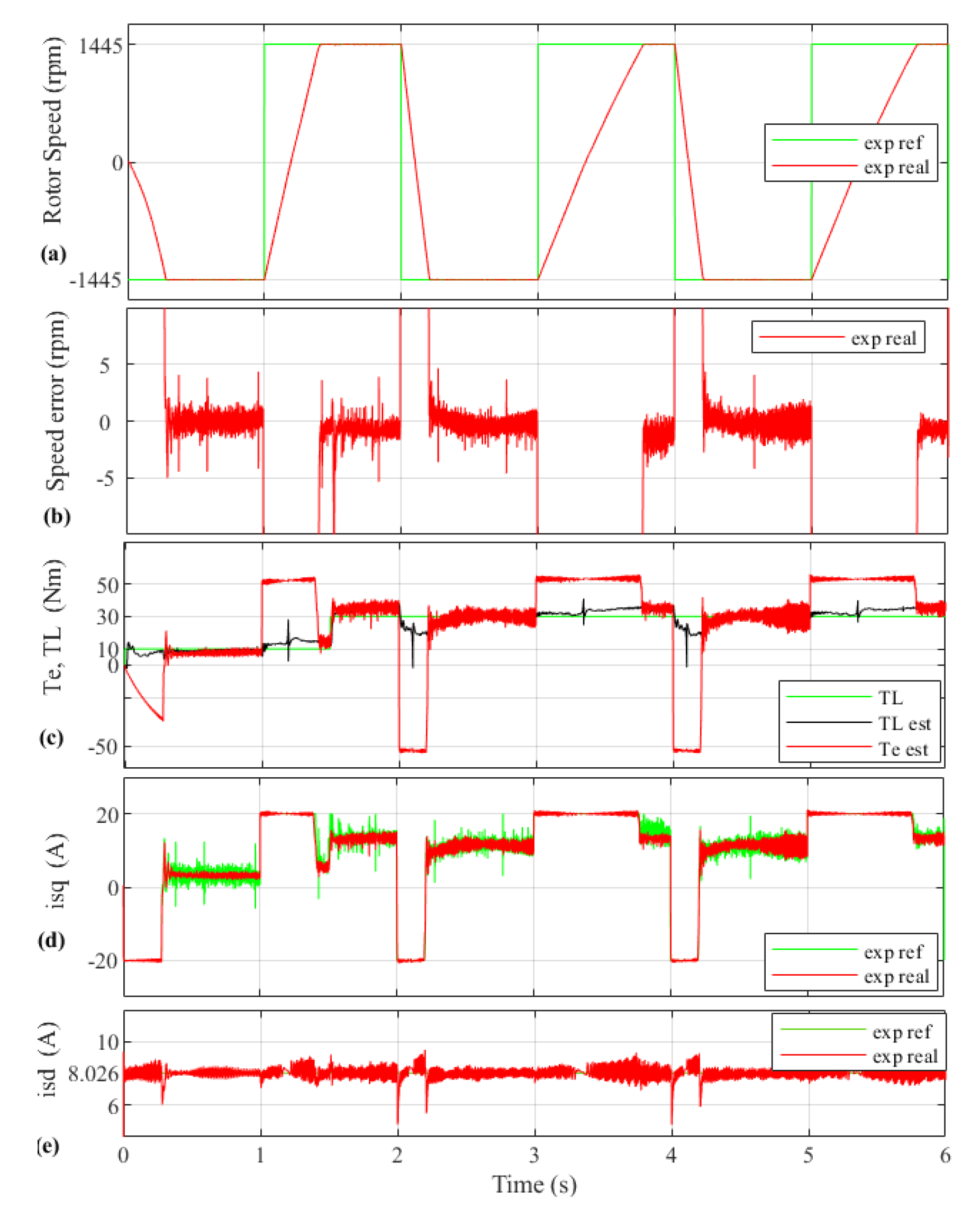
The performance of the motor when it is working at rated speed is shown in
Figure 5 by employing a square speed reference of 1445 rpm and two load torque steps, starting at 0 s (10 nm) and
s (plus 20 nm). Graph
Figure 5a shows how the actual speed tracks its reference accordingly, and graph
Figure 5b shows that the speed error is limited to 3–4 rpm (
), which means getting high accuracy in the presence of load disturbance. It can be observed in graph
Figure 5c that the electromagnetic torque is smooth and effective, and also the load torque is estimated suitably.
Figure 5d shows good tracking of the torque current. In
Figure 5e, the precise rotor flux current tracking can be seen.
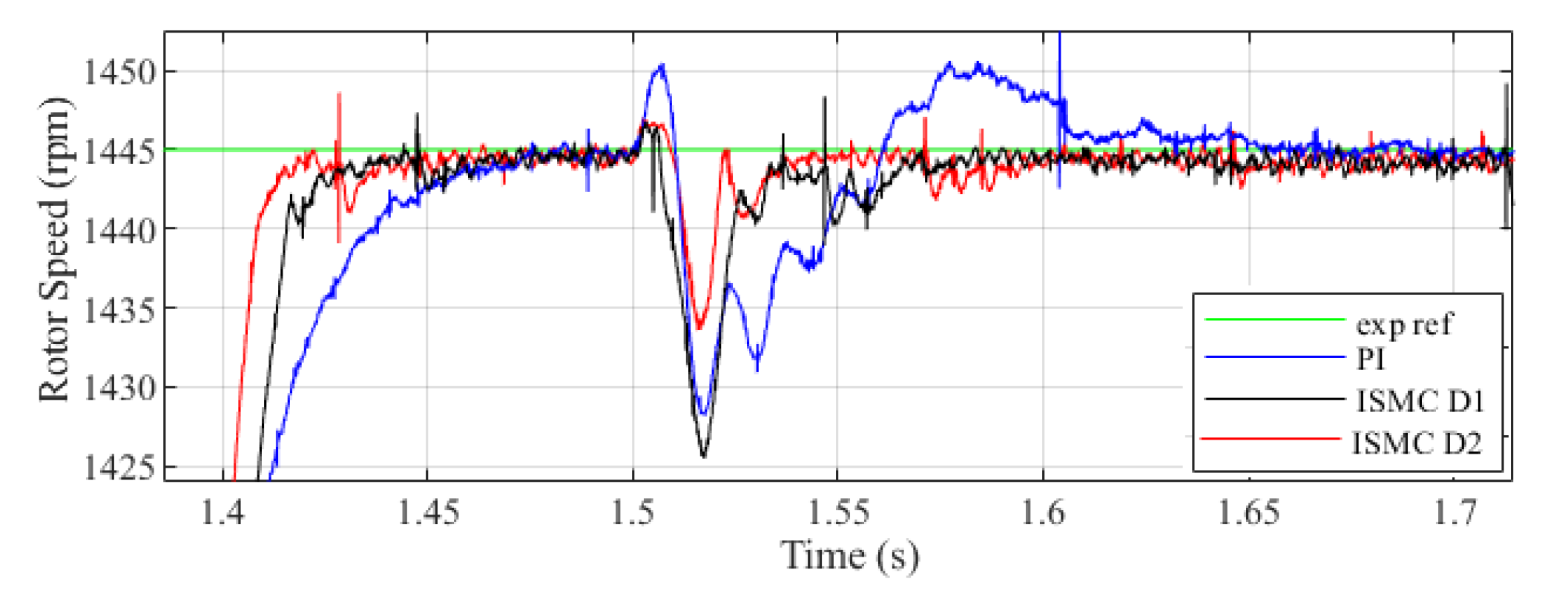
Figure 6 shows the experimental tests for performance comparison between the two ISMC and the PI speed regulators by using the same speed and load conditions as in the experiment of
Figure 5. Worth noting that, in the tuning process of the PI controller, experimentally maximum bandwidth has been assigned to the regulator to have the fastest possible response in the rotor speed convergence. As it can be seen, the ISMC is converging to a reference signal faster than the PI controller even when the motor is working at a high speed, such as in the same way as is shown in the previous graph of
Figure 5. Furthermore, at
s (when the second step of load torque is applied to the motor), the effect of the load torque is being rejected more efficiently employing the proposed ISMC (D2 design) compared with the conventional ISMC (D1 design) and the PI regulators: recovering period is faster, and the response presents less oscillation.
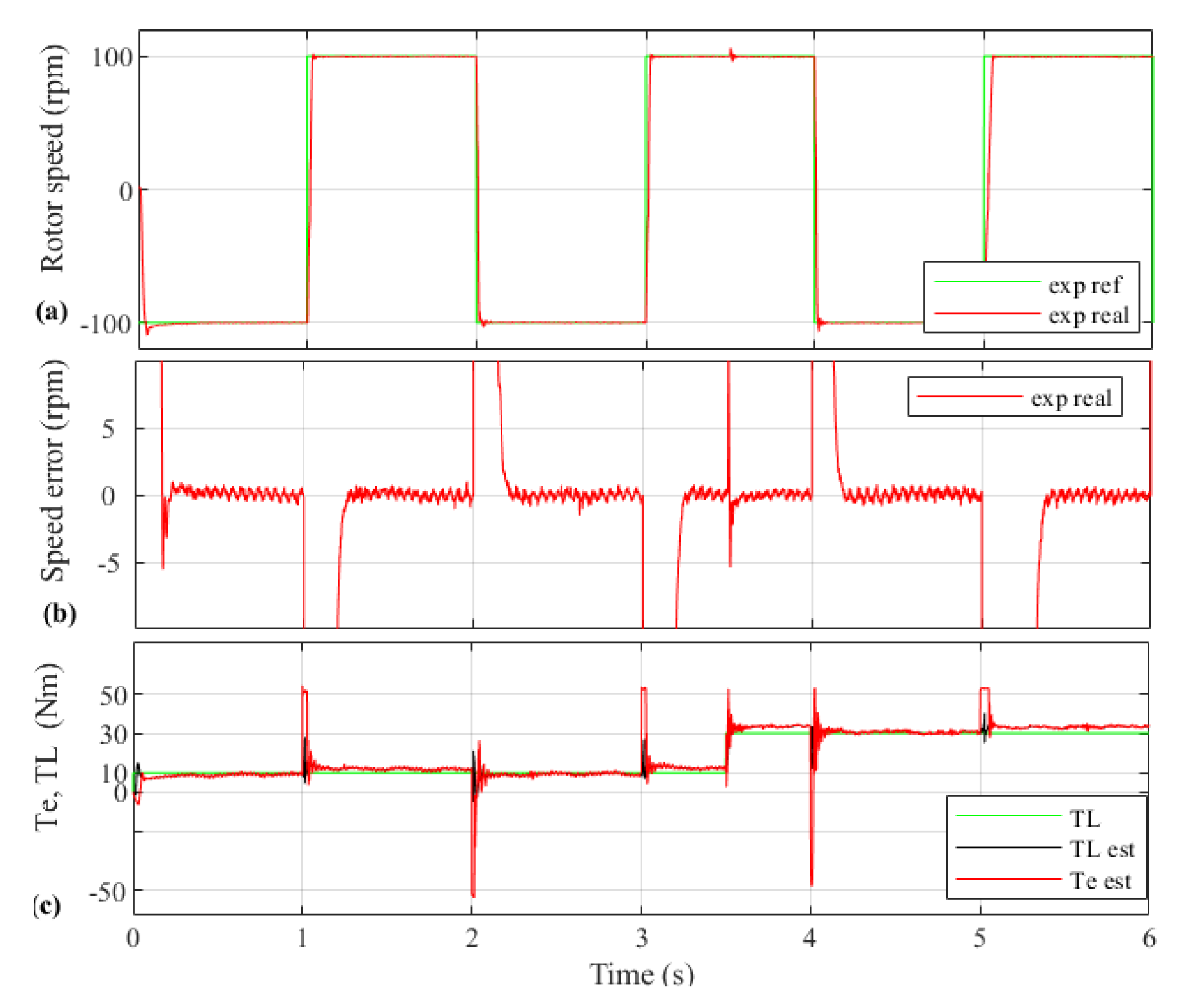
In
Figure 7, the performance of the motor when it is working at low speed (100 rpm) with load disturbance (
Nm at
s and
Nm at
s) can be seen. It can be observed that the speed tracking
Figure 7a is very satisfactory. Furthermore, the accuracy in
Figure 7b is excellent, getting an error of less than 2 rpm (0.16%). The electromagnetic torque necessary to get these good results is smooth, and consequently, it does not present the chattering phenomenon (
Figure 7c).
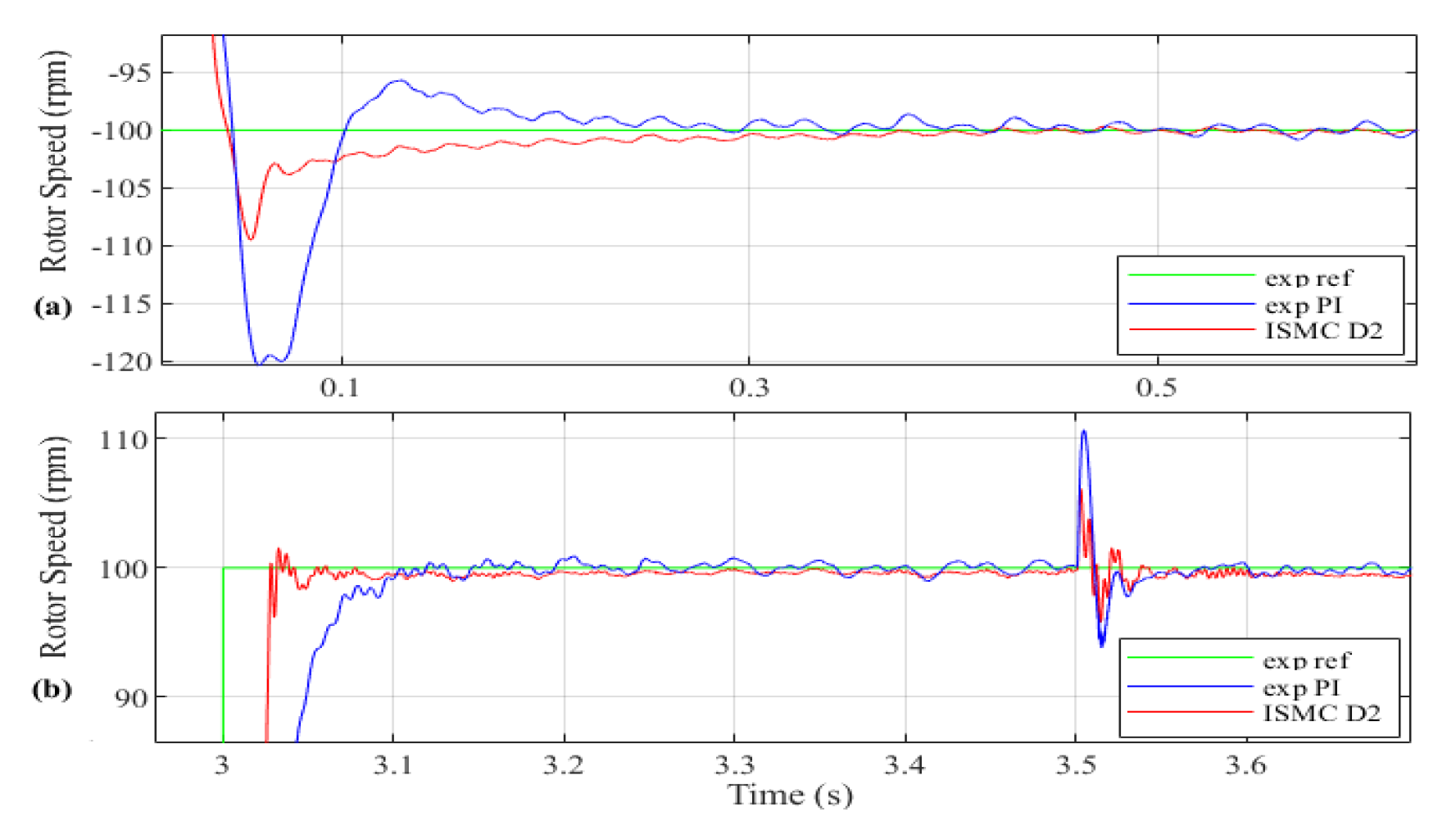
Figure 8 shows the experimental tests for performance comparison between the enhanced ISMC (D2 design) and the PI speed regulators while using the same speed and load conditions as in
Figure 8 test. The proposed ISMC is converging to a reference signal faster than the PI controller. Furthermore, at
s (after applying the second step of load torque) to the motor, the behavior of the enhanced ISMC is more robust due to the fast and more effective rejection of load torque.
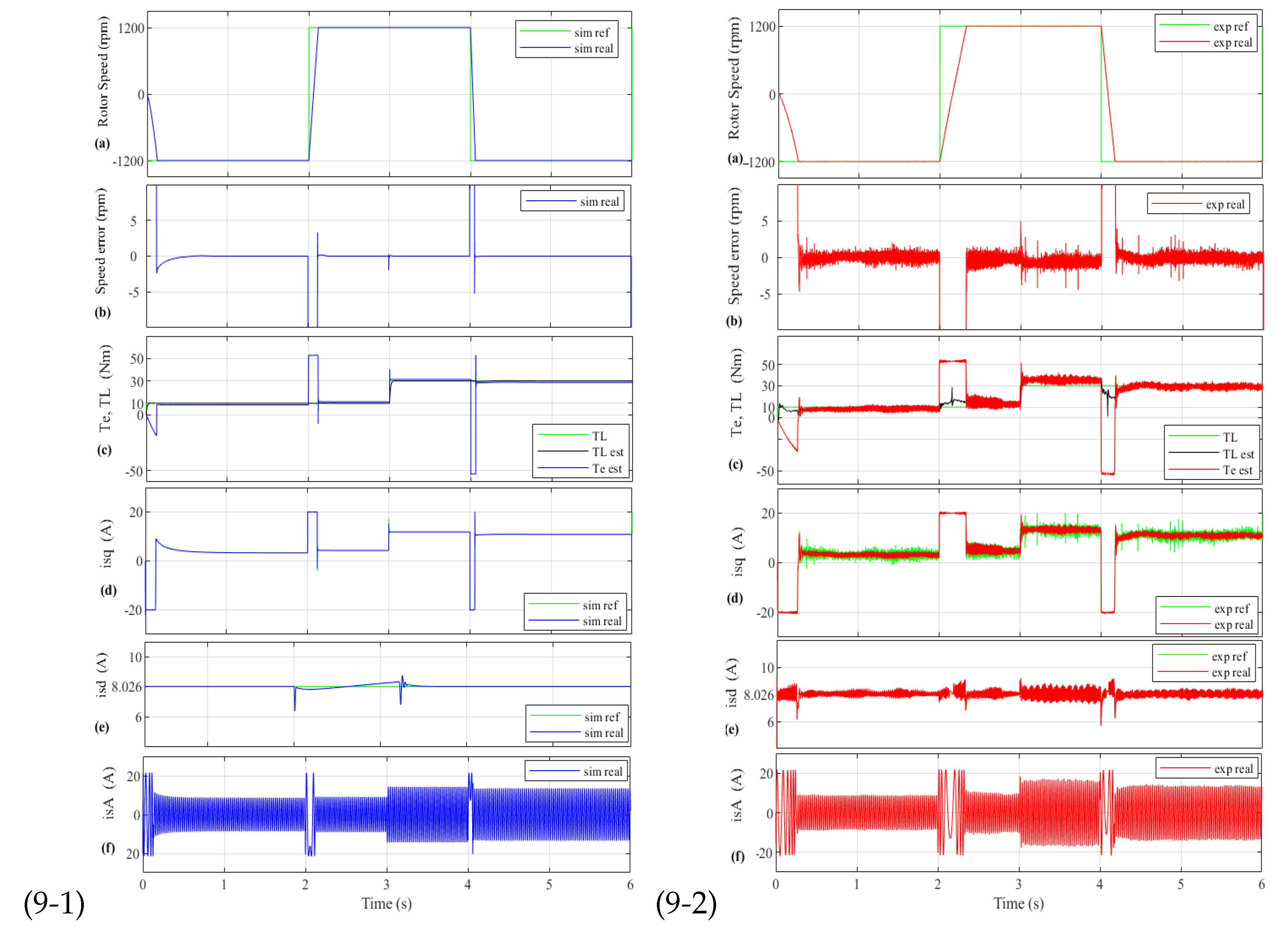
Figure 9(9-1) shows the simulation performance of the machine by using enhanced ISMC (D2 design), which takes a considerably minor
J parameter (
lower), as mentioned before. The IM has been tested by employing 1200 rpm reference speed. In
Figure 9(9-2), the result of experimental robustness performance corresponding to the provided simulation is demonstrated. Graph (a) shows the motor speed response. However, the speed tracking is good. Furthermore, the speed error (graph (b)) can be considered very satisfactory, which is around 2 rpm (0.16%). Finally, electromagnetic torque, stator torque current, rotor flux current, and three-phase of stator currents have been shown in graphs (c), (d), (e) and (f), respectively, and they can be considered very proper. Therefore, the robustness of the speed controller has been tested by changing an important parameter of the motor specification in the speed controller (
J).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}