
Modular Capsules with Assembly and Separation Mechanism: Proof of Concept

 , ,
, , 
Abstract
:1. Introduction
2. Materials and Methods
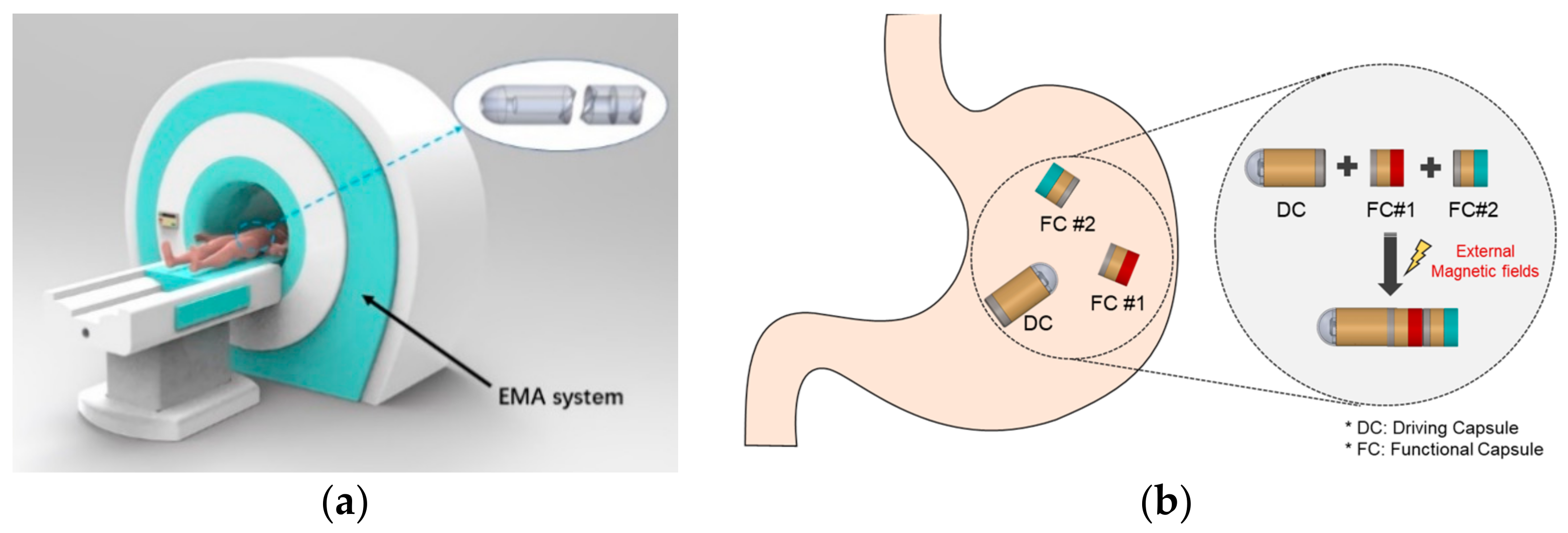
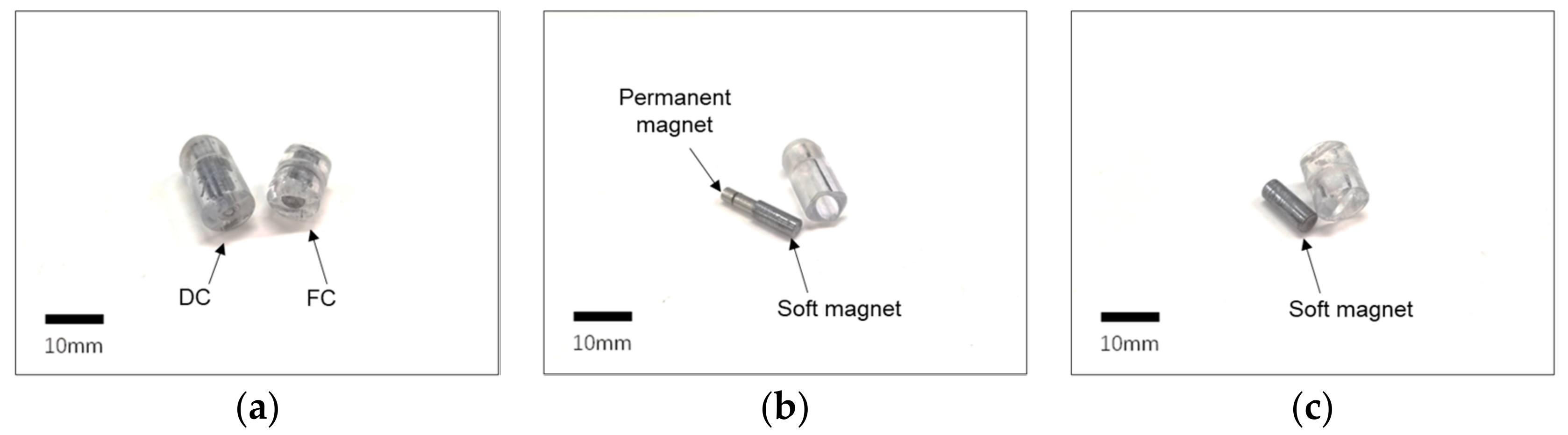
2.1. Modular Capsule Design
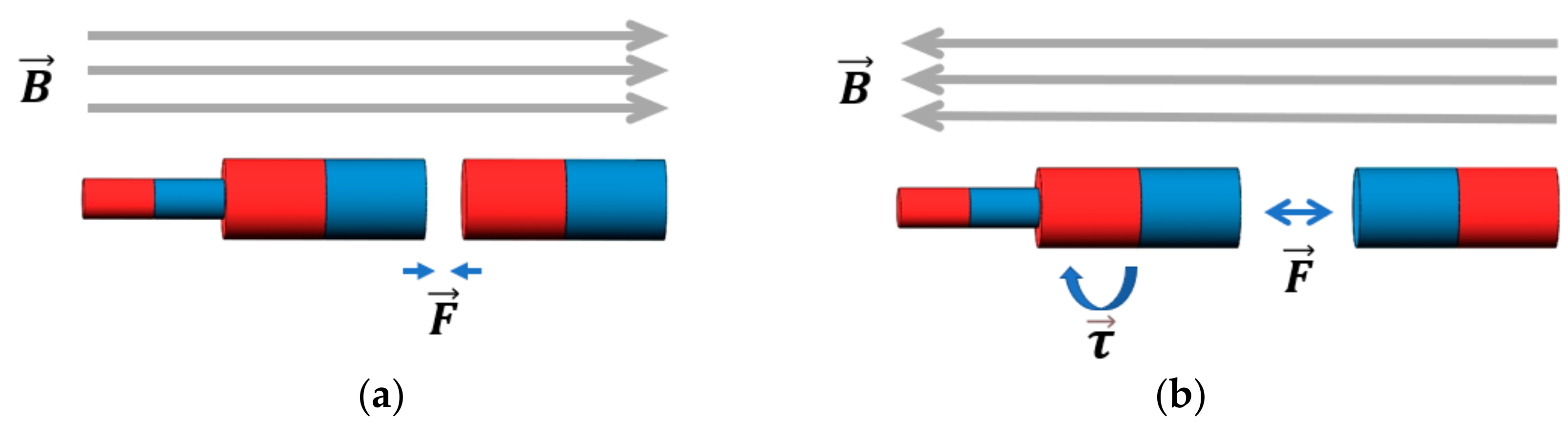
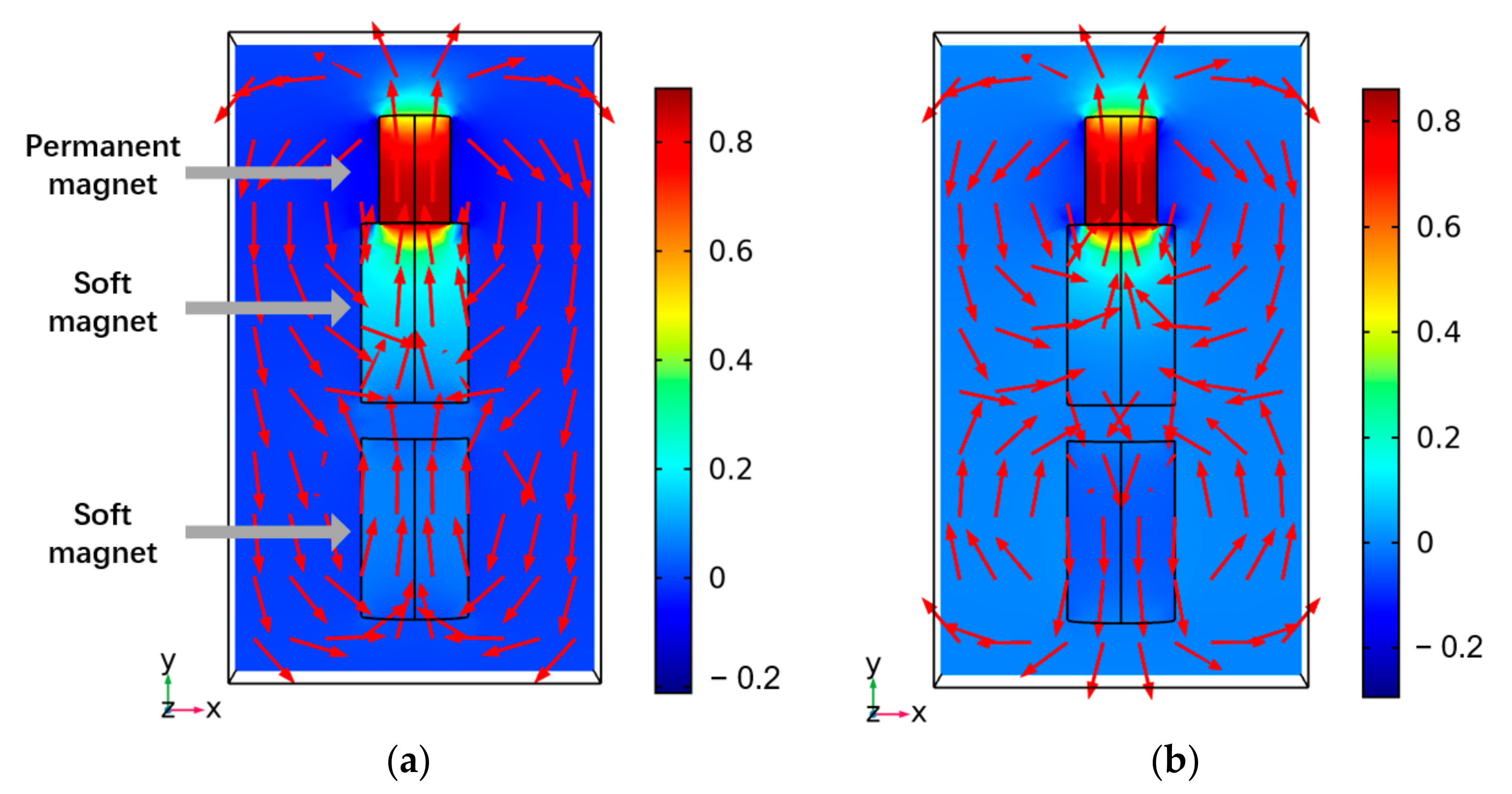
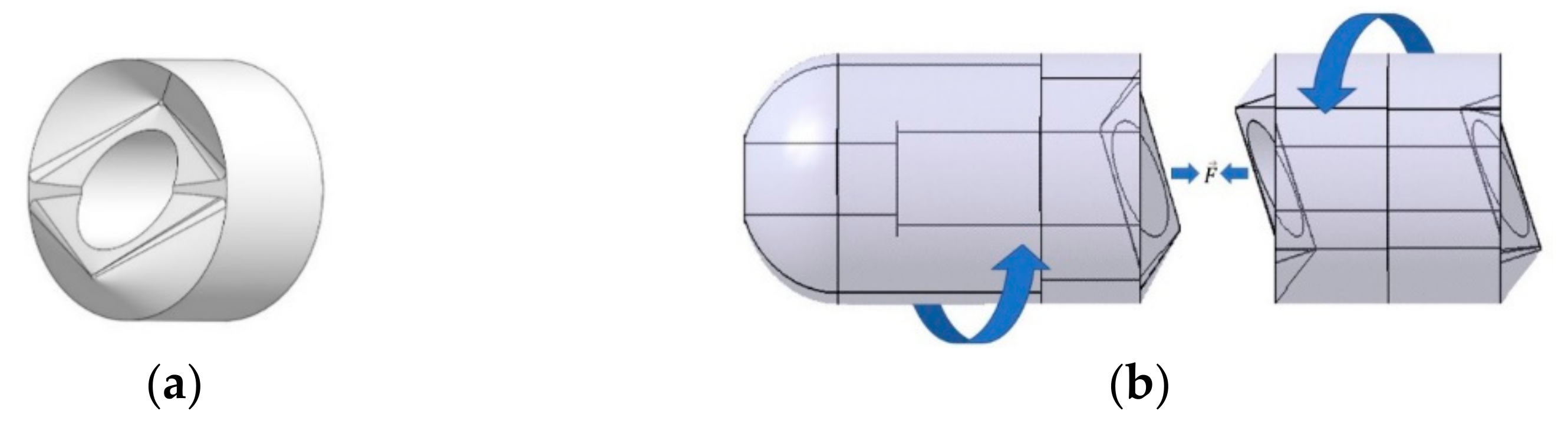
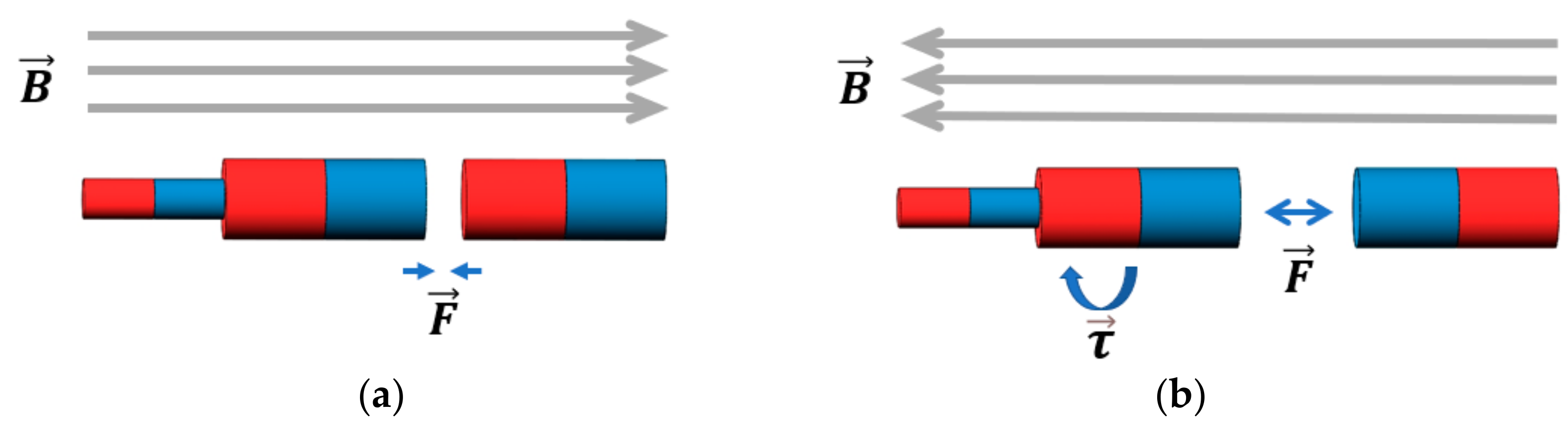
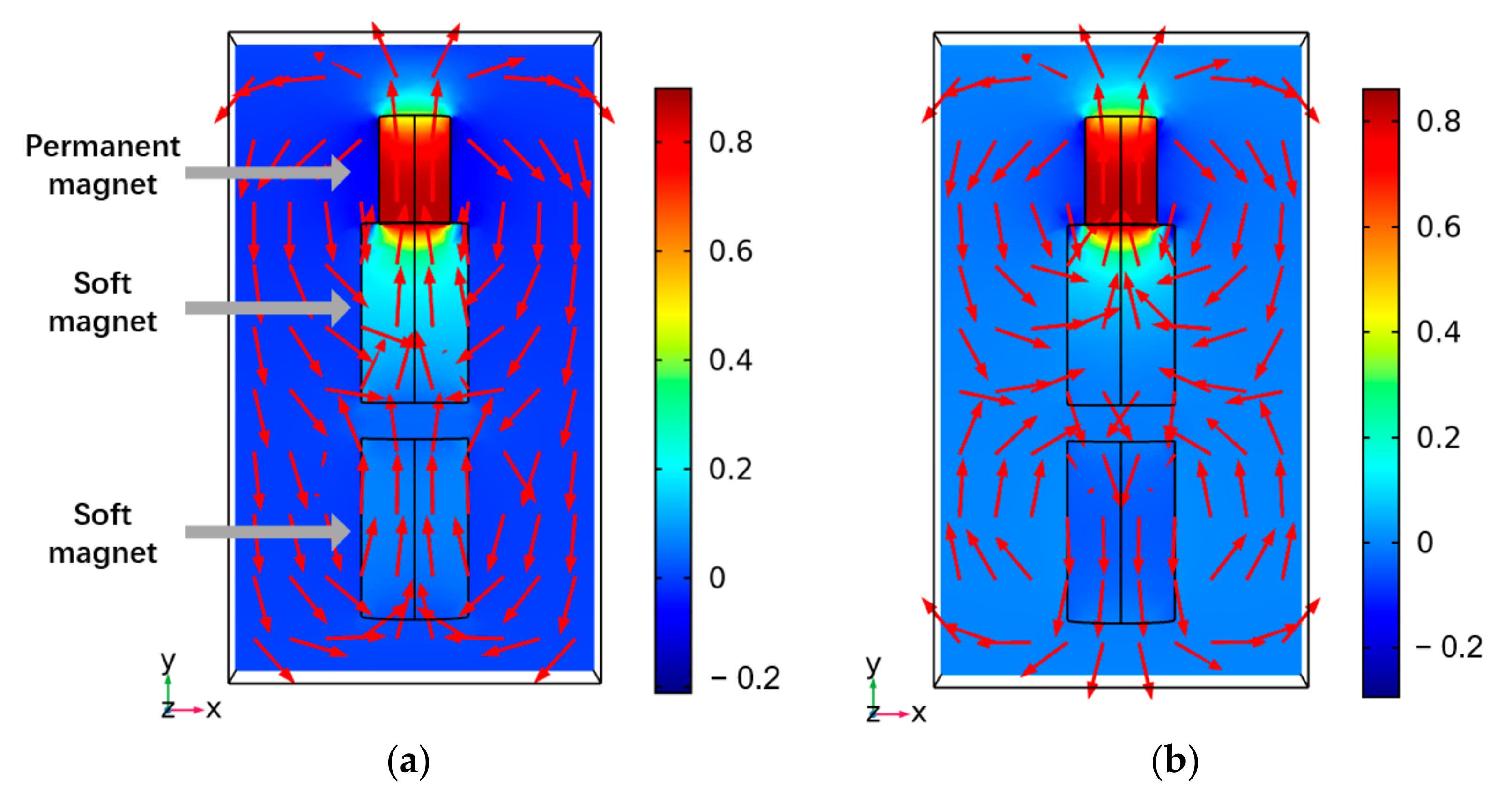
2.2. Assembly and Separation Mechanism of the Modular Capsule
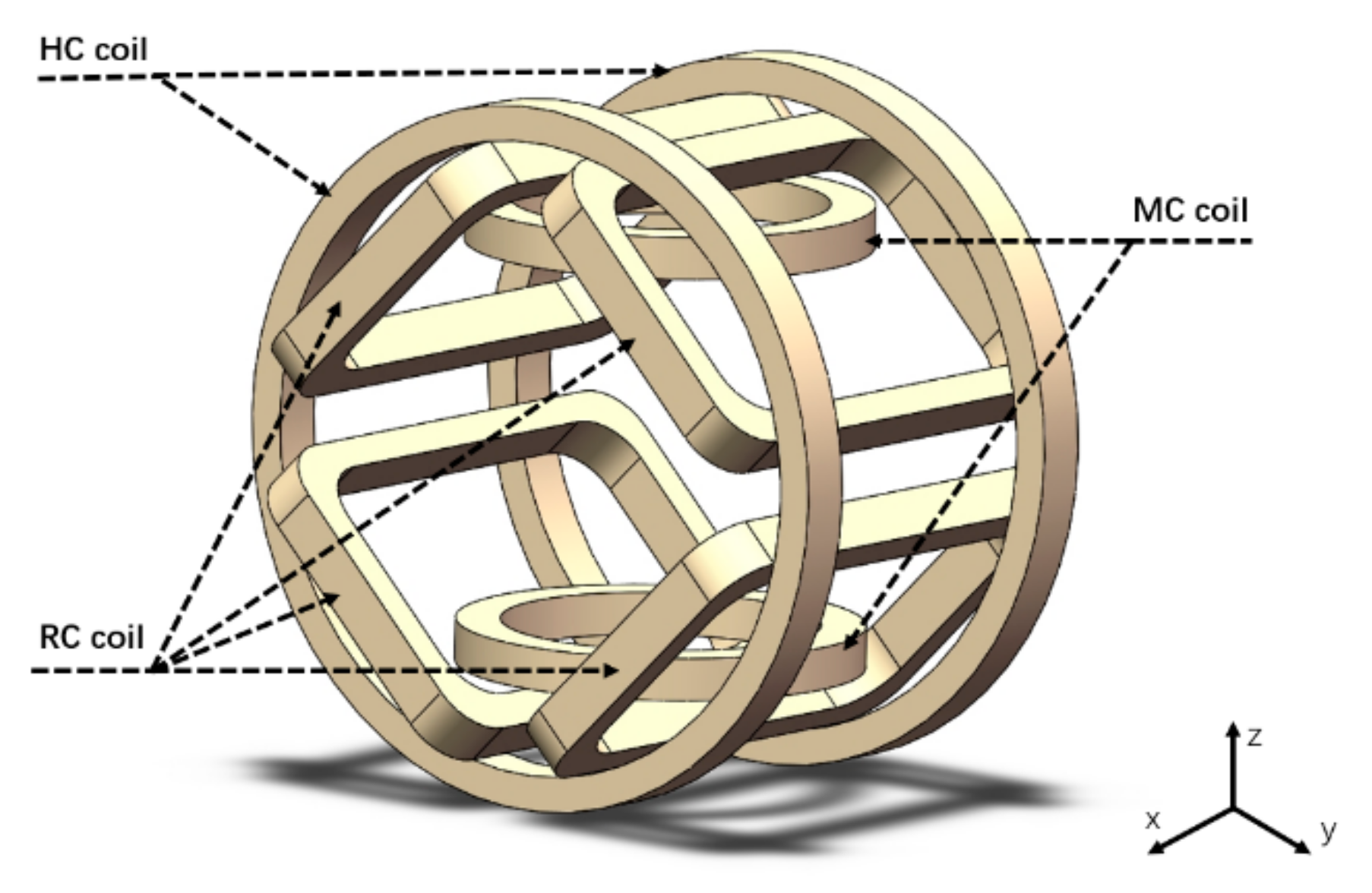
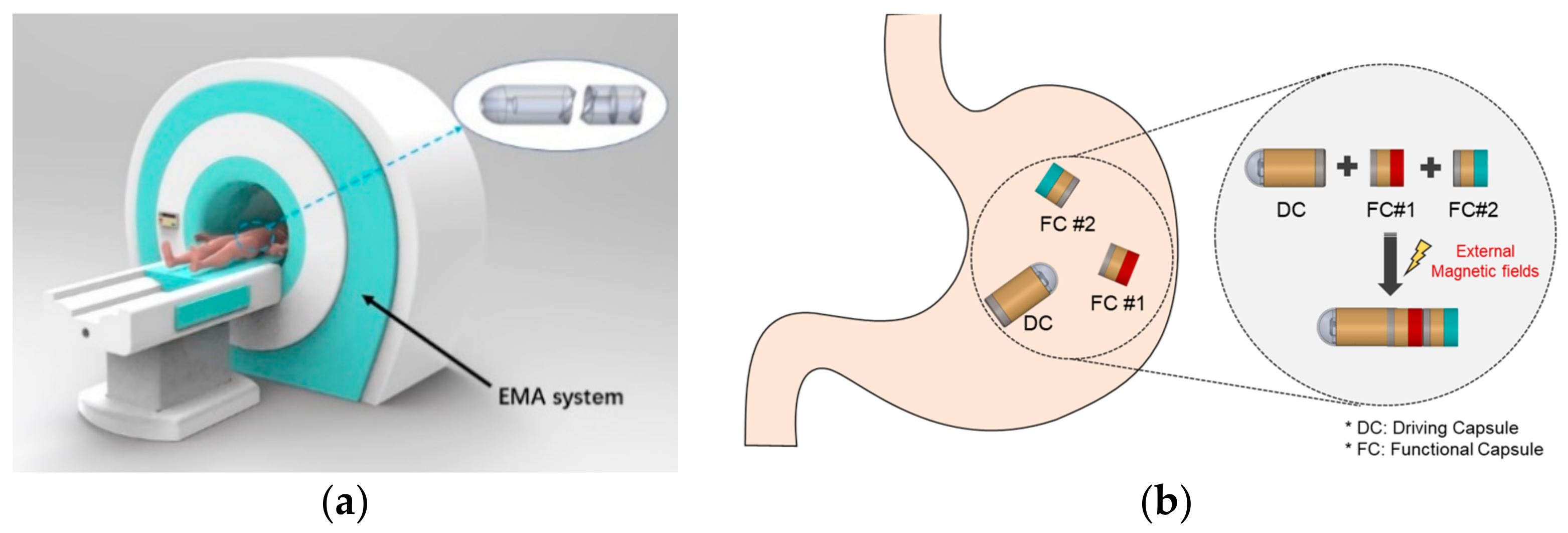
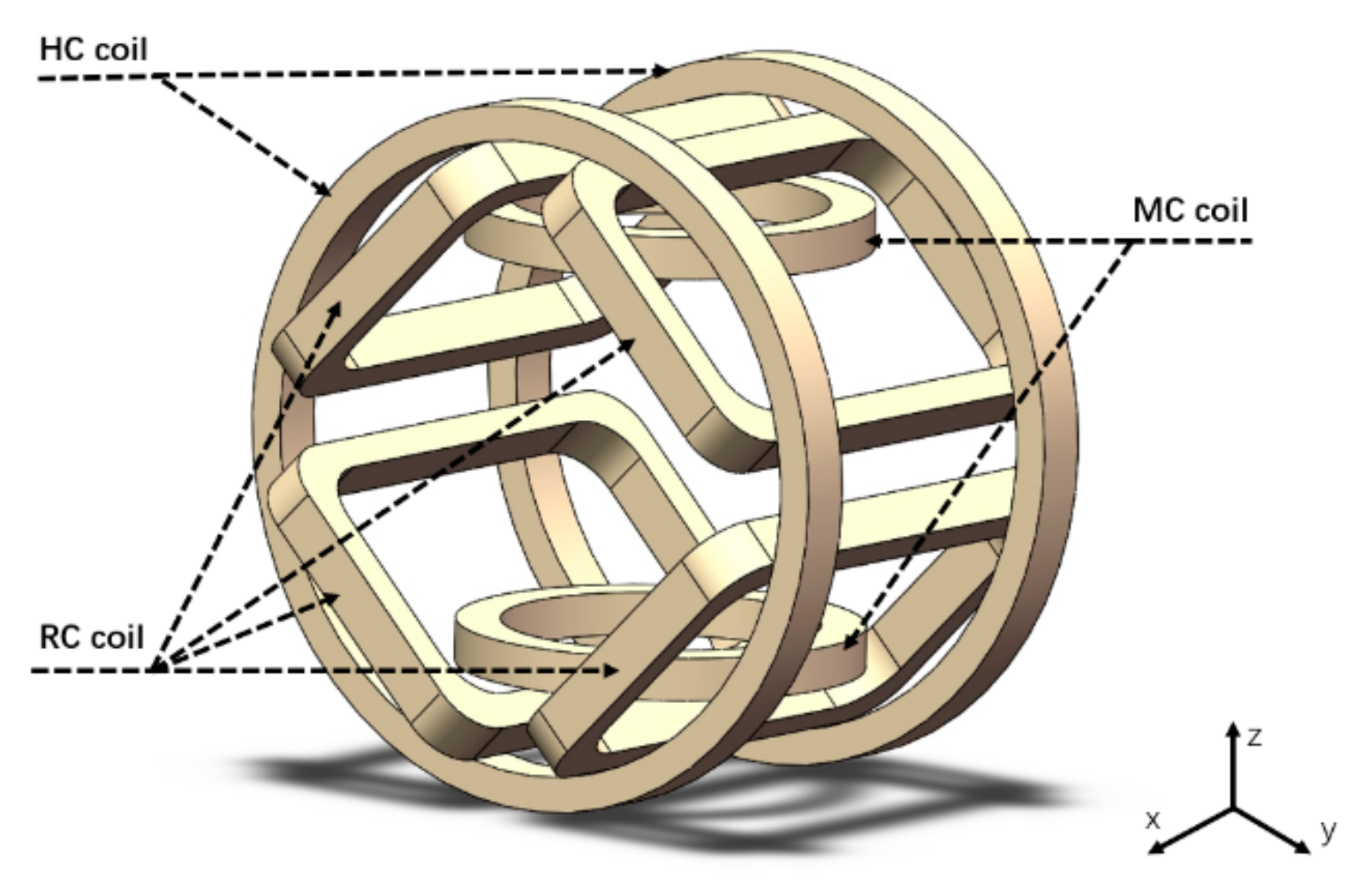
2.3. Control Methods of External Magnetic Fields
3. Experiments
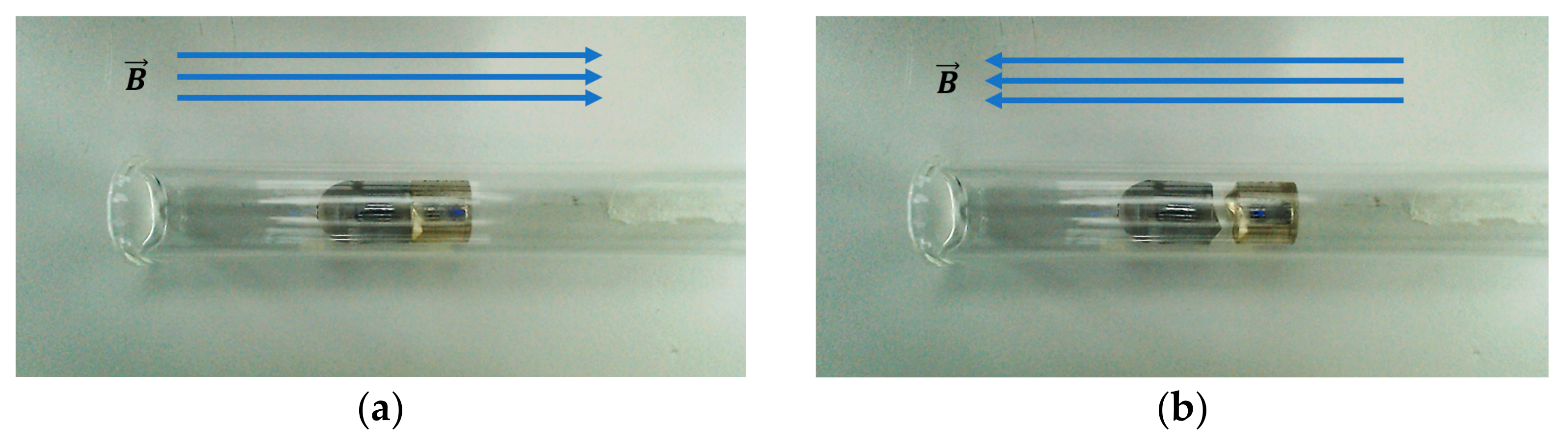
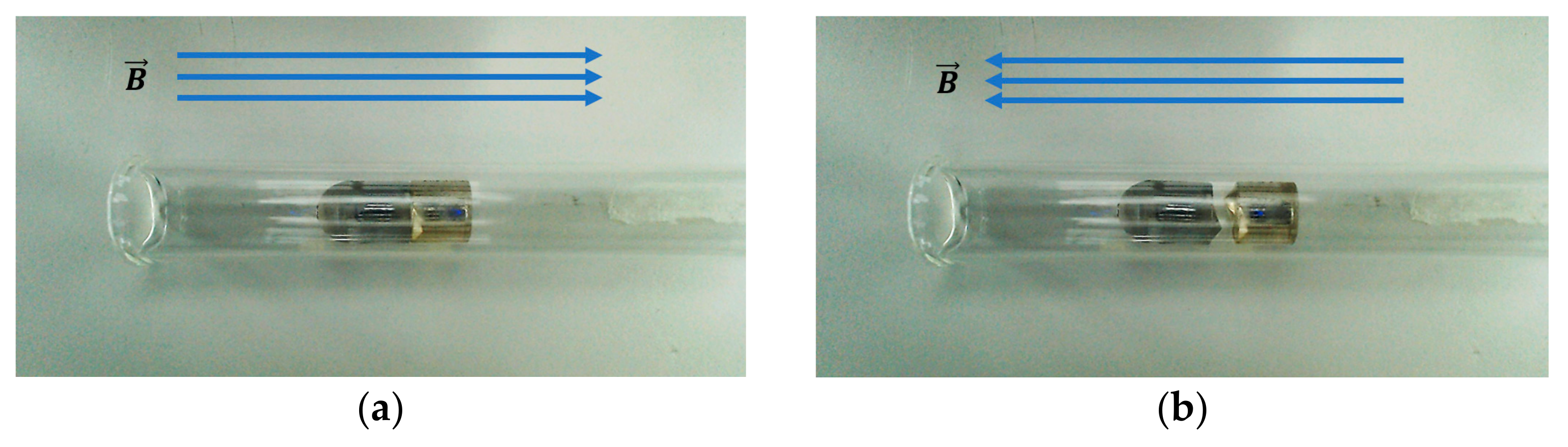
3.1. Verification of the Principle of Assembly and Separation Mechanism
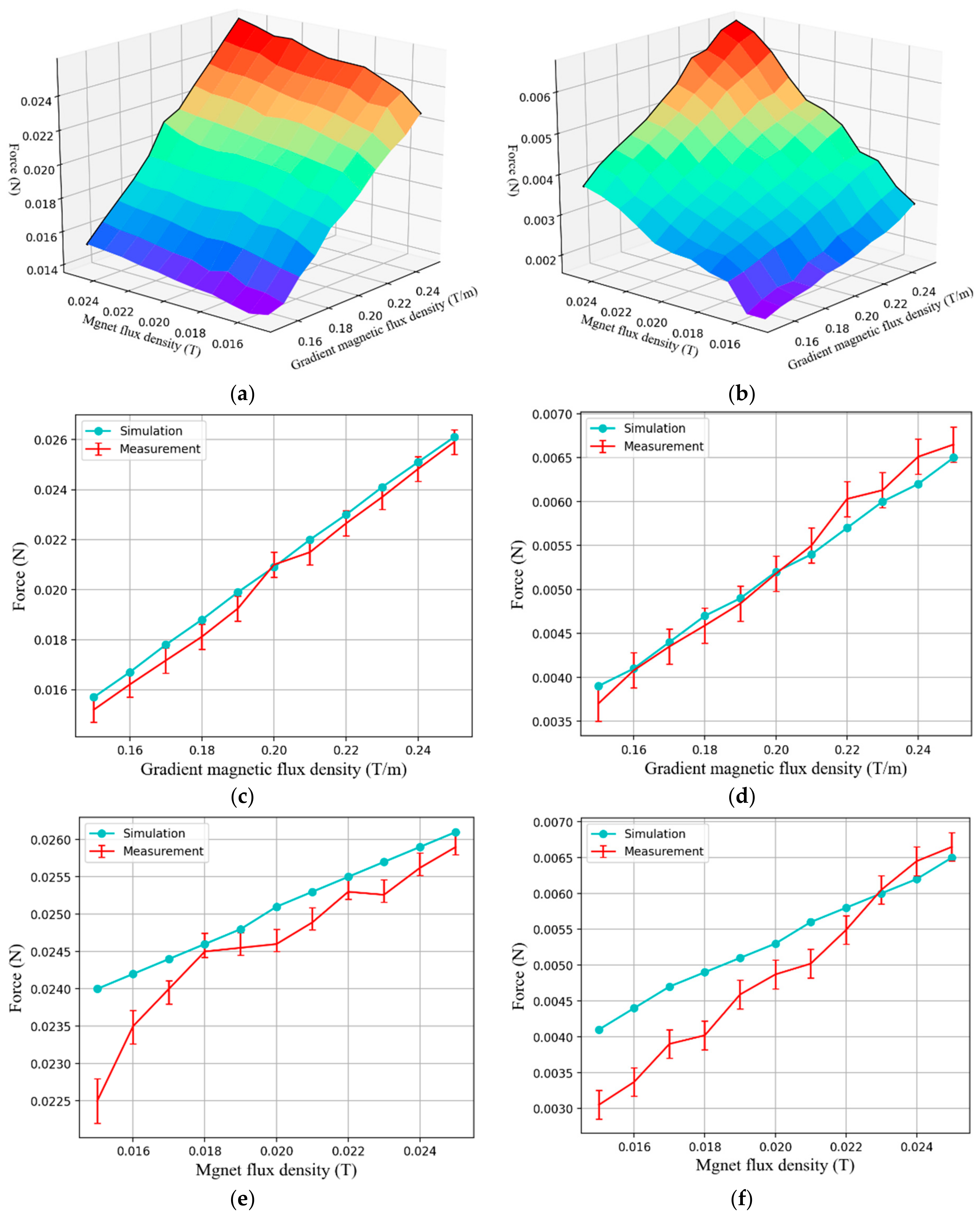
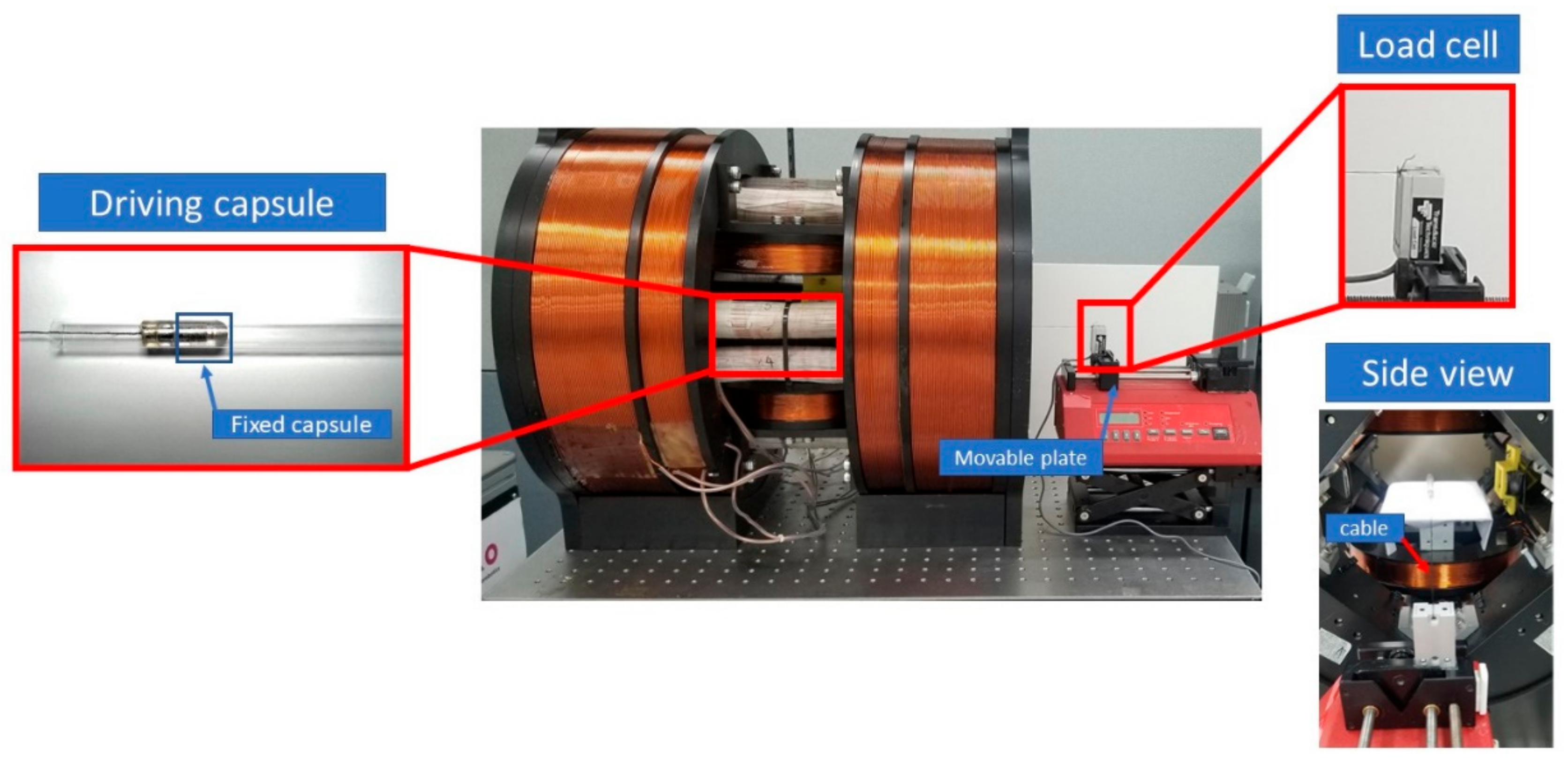
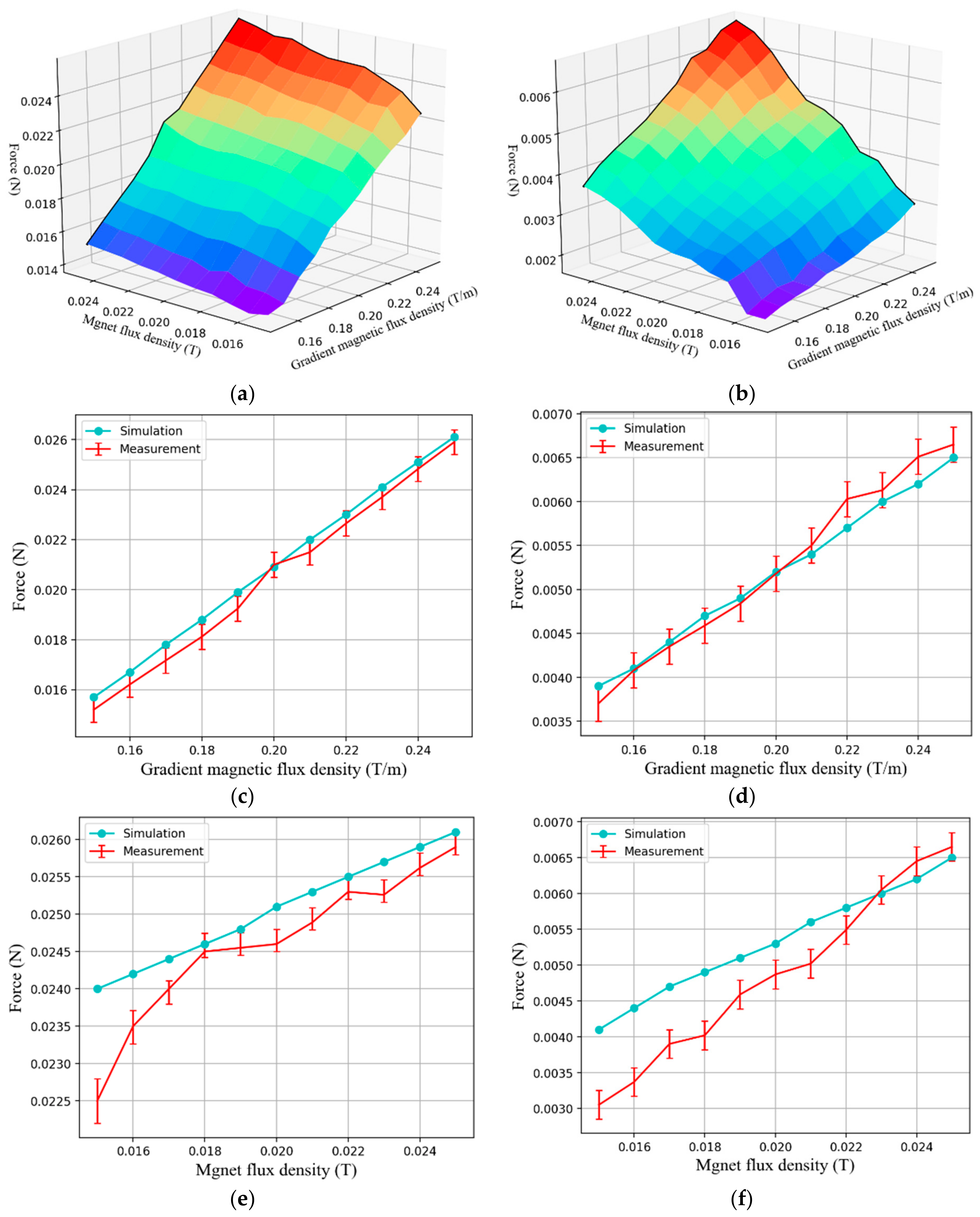
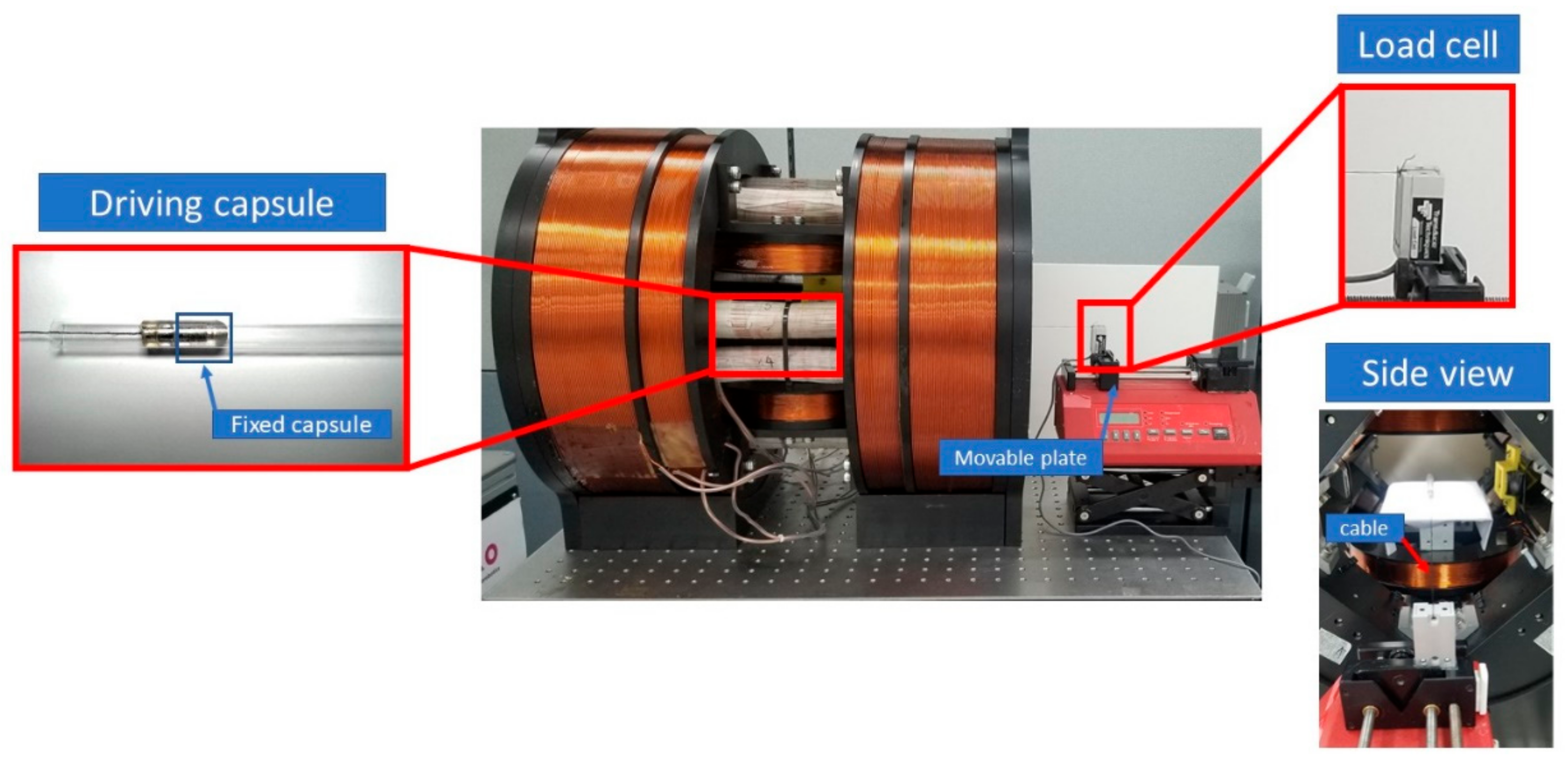
3.2. Propulsion Force Evaluation
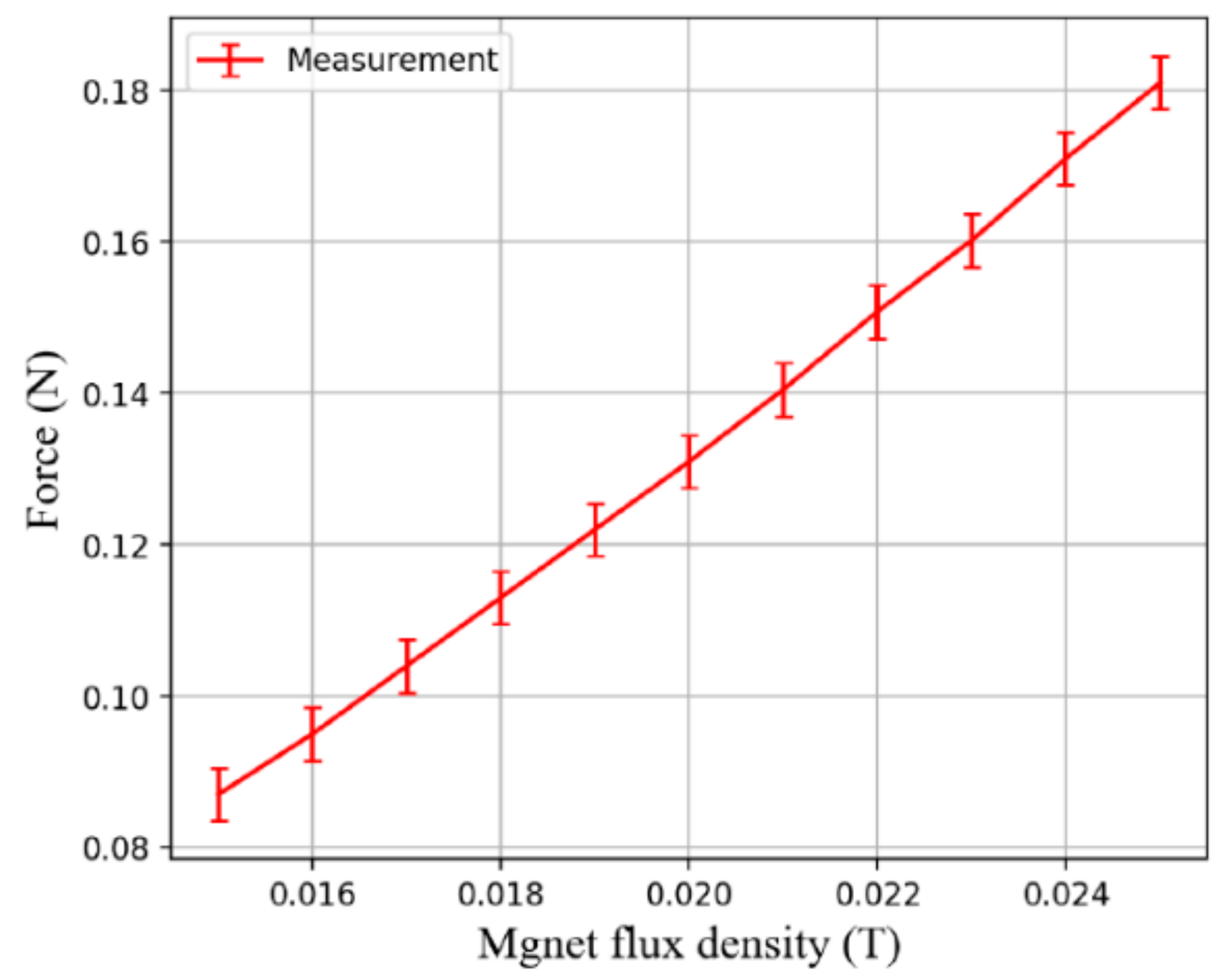
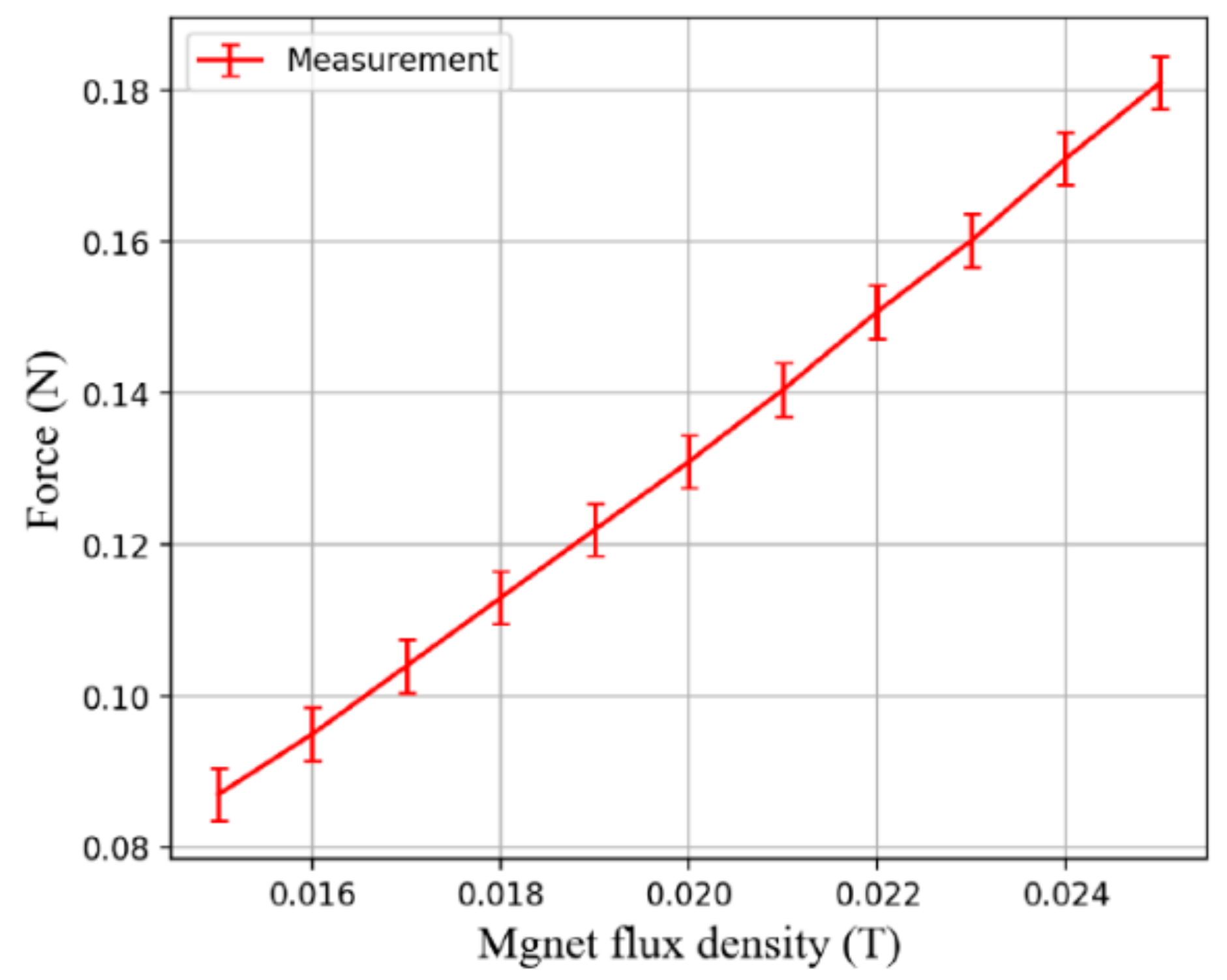
3.3. Attraction Force Evaluation
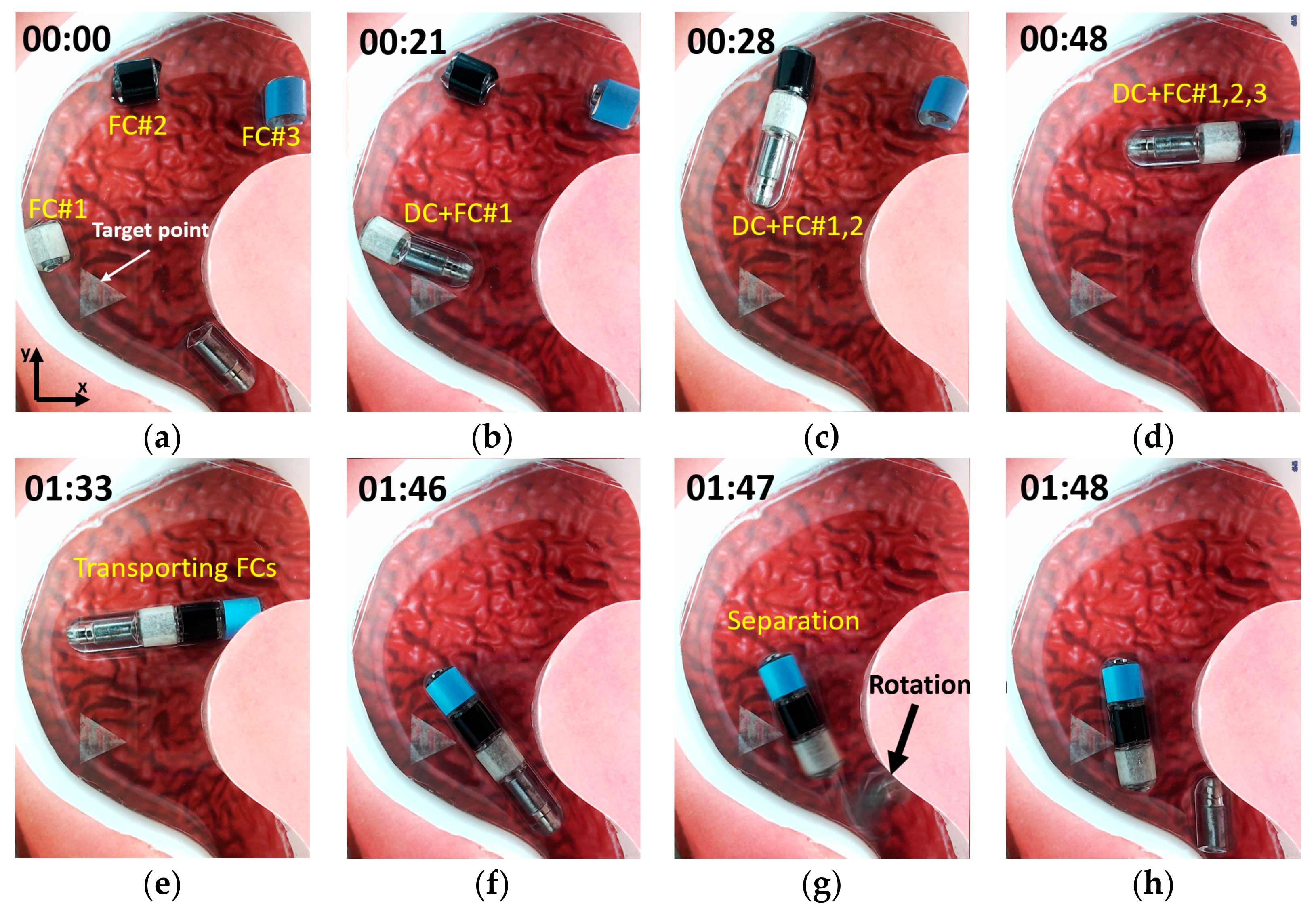
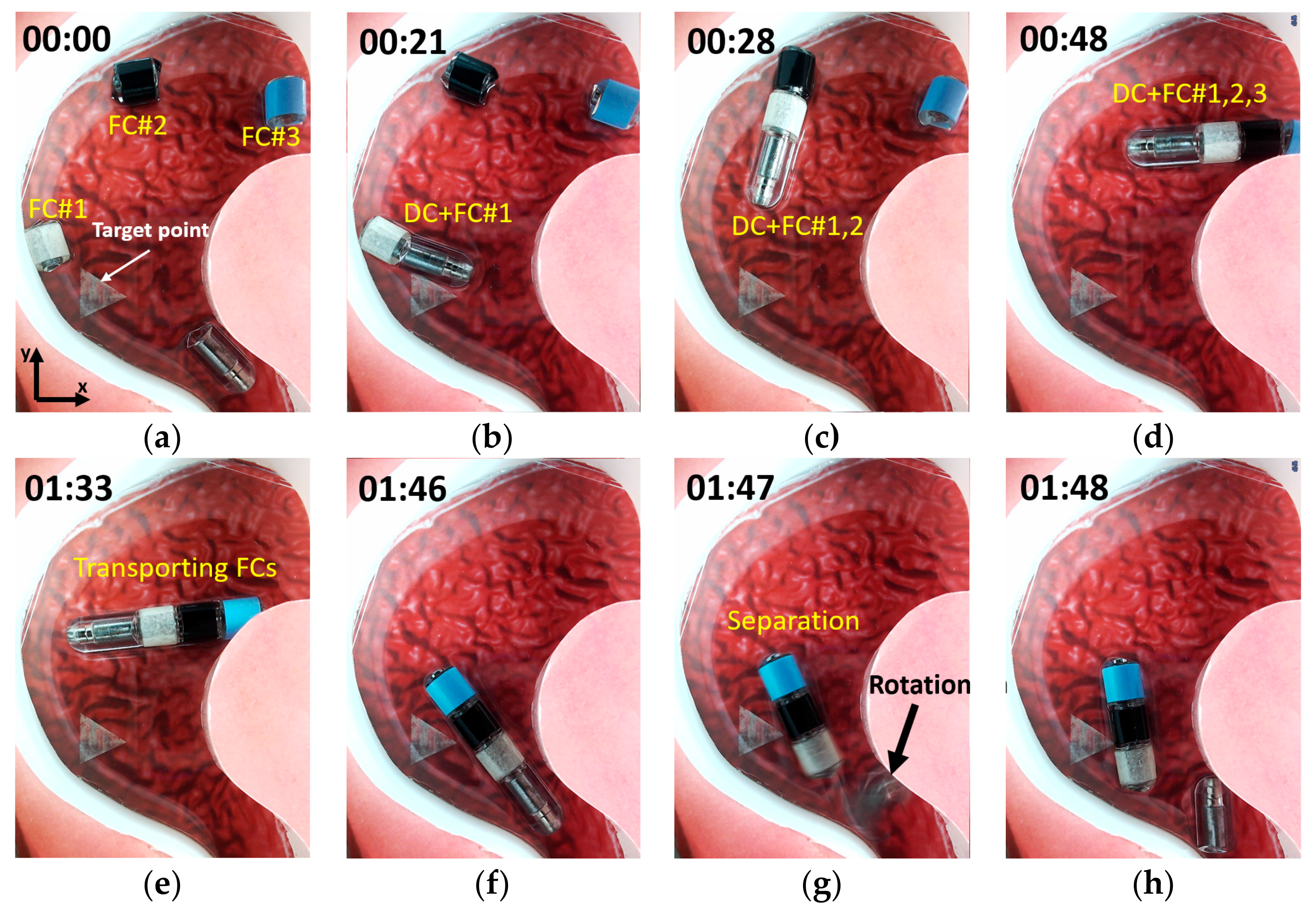
3.4. In Vitro Validation in a Stomach Phantom
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Iddan, G.; Meron, G.; Glukhovsky, A.; Swain, P. Wireless capsule endoscopy. Nature 2000, 405, 417. [Google Scholar] [CrossRef]
- Sendoh, M.; Ishiyama, K.; Arai, K.I. Fabrication of magnetic actuator for use in capsule endoscope. IEEE Trans. Magnetics 2003, 39, 3232–3234. [Google Scholar] [CrossRef]
- Chiba, A.; Sendoh, M.; Ishiyama, K.; Arai, K.I.; Kawano, H.; Uchiyama, A.; Takizawa, H. Magnetic Actuator for a Capsule Endoscope Navigation System. J. Magn. 2007, 12, 89–92. [Google Scholar] [CrossRef]
- Morita, E.; Ohtsuka, N.; Shindo, Y.; Nouda, S.; Kuramoto, T.; Inoue, T.; Murano, M.; Umegaki, E.; Higuchi, K. In vivo trial of a driving system for a self-propelling capsule endoscope using a magnetic field (with video). Gastrointest. Endosc. 2010, 72, 836–840. [Google Scholar] [CrossRef] [PubMed]
- Kósa, G.; Jakab, P.; Jolesz, F.; Hata, N. Swimming capsule endoscope using static and RF magnetic field of MRI for propulsion. In Proceedings of the 2008 IEEE International Conference on Robotics and Automation; Institute of Electrical and Electronics Engineers, Pasadena, CA, USA, 19–23 May 2008; pp. 2922–2927. [Google Scholar]
- Nam, S.-J.; Lee, H.S.; Lim, Y.J. Evaluation of Gastric Disease with Capsule Endoscopy. Clin. Endosc. 2018, 51, 323–328. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liao, Z.; Hou, X.; Lin-Hu, E.-Q.; Sheng, J.-Q.; Ge, Z.-Z.; Jiang, B.; Hou, X.-H.; Liu, J.-Y.; Li, Z.; Huang, Q.-Y.; et al. Accuracy of Magnetically Controlled Capsule Endoscopy, Compared With Conventional Gastroscopy, in Detection of Gastric Diseases. Clin. Gastroenterol. Hepatol. 2016, 14, 1266–1273. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Denzer, U.W.; Rösch, T.; Hoytat, B.; Abdel-Hamid, M.; Hebuterne, X.; Vanbiervielt, G.; Filippi, J.; Ogata, H.; Hosoe, N.; Ohtsuka, K.; et al. Magnetically Guided Capsule Versus Conventional Gastroscopy for Upper Abdominal Complaints. J. Clin. Gastroenterol. 2015, 49, 101–107. [Google Scholar] [CrossRef] [PubMed]
- Pandolfino, J.; Pandolfino, J.E.; Richter, J.E.; Ours, T.; Guardino, J.M.; Chapman, J.; Kahrilas, P.J. Ambulatory esophageal pH monitoring using a wireless system. Am. J. Gastroenterol. 2003, 98, 740–749. [Google Scholar] [CrossRef]
- Woods, S.P.; Constandinou, T.G. Wireless capsule endoscope for targeted drug delivery: Mechanics and design considerations. IEEE Trans. Biomed. Eng. 2013, 60, 945–953. [Google Scholar] [CrossRef] [Green Version]
- Hoang, M.C.; Le, V.H.; Kim, J.; Choi, E.; Kang, B.; Park, J.-O.; Kim, C.-S. A wireless tattooing capsule endoscope using external electromagnetic actuation and chemical reaction pressure. PLoS ONE 2019, 14, e0219740. [Google Scholar] [CrossRef] [Green Version]
- Hoang, M.C.; Le, V.H.; Kim, J.; Choi, E.; Kang, B.; Park, J.-O.; Kim, C.-S. Untethered Robotic Motion and Rotating Blade Mechanism for Actively Locomotive Biopsy Capsule Endoscope. IEEE Access 2019, 7, 93364–93374. [Google Scholar] [CrossRef]
- Hoang, M.C.; Le, V.H.; Nguyen, K.T.; Du Nguyen, V.; Kim, J.; Choi, E.; Bang, S.; Kang, B.; Park, J.-O.; Kim, C.-S. A Robotic Biopsy Endoscope with Magnetic 5-DOF Locomotion and a Retractable Biopsy Punch. Micromachines 2020, 11, 98. [Google Scholar] [CrossRef] [Green Version]
- Yim, S.; Gultepe, E.; Gracias, D.H.; Sitti, M. Biopsy using a Magnetic Capsule Endoscope Carrying, Releasing, and Retrieving Untethered Microgrippers. IEEE Trans. Biomed. Eng. 2014, 61, 513–521. [Google Scholar] [CrossRef] [Green Version]
- Do, T.N.; Seah, T.E.T.; Yu, H.K.; Phee, S.J. Development and Testing of a Magnetically Actuated Capsule Endoscopy for Obesity Treatment. PLoS ONE 2016, 11, e0148035. [Google Scholar] [CrossRef]
- Le, V.H.; Leon-Rodriguez, H.; Lee, C.; Go, G.; Zhen, J.; Du Nguyen, V.; Choi, H.; Ko, S.Y.; Park, J.-O.; Park, S. A soft-magnet-based drug-delivery module for active locomotive intestinal capsule endoscopy using an electromagnetic actuation system. Sensors Actuators A Phys. 2016, 243, 81–89. [Google Scholar] [CrossRef]
- Nguyen, K.T.; Hoang, M.C.; Choi, E.; Kang, B.; Park, J.-O.; Kim, C.-S. Medical Microrobot—A Drug Delivery Capsule Endoscope with Active Locomotion and Drug Release Mechanism: Proof of Concept. Int. J. Control. Autom. Syst. 2019, 18, 65–75. [Google Scholar] [CrossRef]
- Rondonotti, E.; Herrerias, J.M.; Pennazio, M.; Caunedo, A.; Mascarenhas-Saraiva, M.; de Franchis, R. Complications, limitations, and failures of capsule endoscopy: A review of 733 cases. Gastrointest. Endosc. 2005, 62, 712–716. [Google Scholar] [CrossRef]
- Guo, J.; Liu, P.; Guo, S.; Wang, L.; Sun, G. Development of a novel wireless spiral capsule robot with modular structure. In Proceedings of the 2017 IEEE International Conference on Mechatronics and Automation (ICMA), Takamatsu, Japan, 6–9 August 2017; pp. 439–444. [Google Scholar] [CrossRef]
- Kim, L.; Tang, S.C.; Yoo, S.-S. Prototype modular capsule robots for capsule endoscopies. In Proceedings of the 2013 13th International Conference on Control, Automation and Systems (ICCAS 2013), Gwangju, Korea, 20–23 October 2013; pp. 350–354. [Google Scholar] [CrossRef]
- Nagy, Z.; Fluckiger, M.; Oung, R.; Kaliakatsos, I.K.; Hawkes, E.W.; Nelson, B.J.; Harada, K.; Susilo, E.; Menciassi, A.; Dario, P.; et al. Assembling reconfigurable endoluminal surgical systems: Opportunities and challenges. Int. J. Biomechatronics Biomed. Robot. 2009, 1, 3. [Google Scholar] [CrossRef]
- Harada, K.; Oetomo, D.; Susilo, E.; Menciassi, A.; Daney, D.; Merlet, J.-P.; Dario, P. A reconfigurable modular robotic endoluminal surgical system: Vision and preliminary results. Robot. 2009, 28, 171–183. [Google Scholar] [CrossRef] [Green Version]
- Yoo, S.-S.; Rama, S.; Szewczyk, B.; Pui, J.W.; Lee, W.; Kim, L. Endoscopic capsule robots using reconfigurable modular assembly: A pilot study. Int. J. Imaging Syst. Technol. 2014, 24, 359–365. [Google Scholar] [CrossRef]
- Hoselitz, K. Modern Magnetic Materials. Phys. Bull. 1962, 13, 107–112. [Google Scholar] [CrossRef]
- Hoang, M.C.; Nguyen, K.T.; Le, V.H.; Kim, J.; Choi, E.; Kang, B.; Park, J.-O.; Kim, C.-S. Independent Electromagnetic Field Control for Practical Approach to Actively Locomotive Wireless Capsule Endoscope. IEEE Trans. Syst. Man. Cybern. Syst. 2019, 51, 3040–3052. [Google Scholar] [CrossRef]
- Kim, J.-S.; Sung, I.-H.; Kim, Y.-T.; Kwon, E.-Y.; Kim, D.-E.; Jang, Y.H. Experimental investigation of frictional and viscoelastic properties of intestine for microendoscope application. Tribol. Lett. 2006, 22, 143–149. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Year, [Ref.] | Assembly/Separation Method | Size (Diameter × Length) | Control/Actuation Method | Advantage | Limitation |
|---|---|---|---|---|---|
| 2009 [21] | Permanent magnets/Motor | 15.4 mm 36.5 mm | External remote control/Motor | High controllability and DOF | Energy consumption |
| 2010 [22] | Permanent magnets/Motor | 13 mm 23 mm | External remote control/Motor | High controllability and DOF | Energy consumption |
| 2013 [20] | Permanent magnets/Motor | 32 mm mm | External remote control/Motor | Wireless power transmission | Energy consumption, Large volume, Low DOF, |
| 2014 [23] | Permanent magnets/Motor | 32 mm 88 mm, 40 mm mm | External remote control/Motor | High controllability and DOF | Energy consumption Large volume |
| 2017 [19] | Permanent magnets/Magnetic field | 12.5 mm 39.4 mm 12.5 mm 33.8 mm | Magnet field control and Magnet field actuation | No energy consumption | Low DOF |
| Proposed | Soft magnets/Magnetic field | 10 mm 12~20 mm 10 mm 20 mm | Magnet field control and Magnet field actuation | No energy consumption, High controllability and DOF | Difficult to install the functional component |
| Parts | DC Shell | DC Magnets (Soft, Permanent) | FC Shell | FC Magnet |
|---|---|---|---|---|
| Radius (mm) | 5 | 2, 1.5 | 5 | 2 |
| Length (mm) | 20 | 10, 7 | 12 | 10 |
| Total weight (g) | 2.41 | 1.56 |
| Coils | HC-Coil | MC-Coil | RC-Coil |
|---|---|---|---|
| Radius (mm) | 195 | 100 | n/a |
| Width Length (mm) | n/a | n/a | 156 337 |
| Distance (mm) | 195 | 173.2 | 200 |
| Number of turns | 710 | 660 | 600 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Z.; Hoang, M.C.; Kim, C.-S.; Choi, E.; Bang, D.; Park, J.-O.; Kang, B. Modular Capsules with Assembly and Separation Mechanism: Proof of Concept. Actuators 2021, 10, 159. https://doi.org/10.3390/act10070159
Li Z, Hoang MC, Kim C-S, Choi E, Bang D, Park J-O, Kang B. Modular Capsules with Assembly and Separation Mechanism: Proof of Concept. Actuators. 2021; 10(7):159. https://doi.org/10.3390/act10070159
Chicago/Turabian StyleLi, Zhenyu, Manh Cuong Hoang, Chang-Sei Kim, Eunpyo Choi, Doyeon Bang, Jong-Oh Park, and Byungjeon Kang. 2021. "Modular Capsules with Assembly and Separation Mechanism: Proof of Concept" Actuators 10, no. 7: 159. https://doi.org/10.3390/act10070159
APA StyleLi, Z., Hoang, M. C., Kim, C.-S., Choi, E., Bang, D., Park, J.-O., & Kang, B. (2021). Modular Capsules with Assembly and Separation Mechanism: Proof of Concept. Actuators, 10(7), 159. https://doi.org/10.3390/act10070159