
Direct Drive Servovalves Actuated by Amplified Piezo-Stacks: Assessment through a Detailed Numerical Analysis †


 ,
, 
 and
and 
Abstract
:1. Introduction
2. Materials and Methods
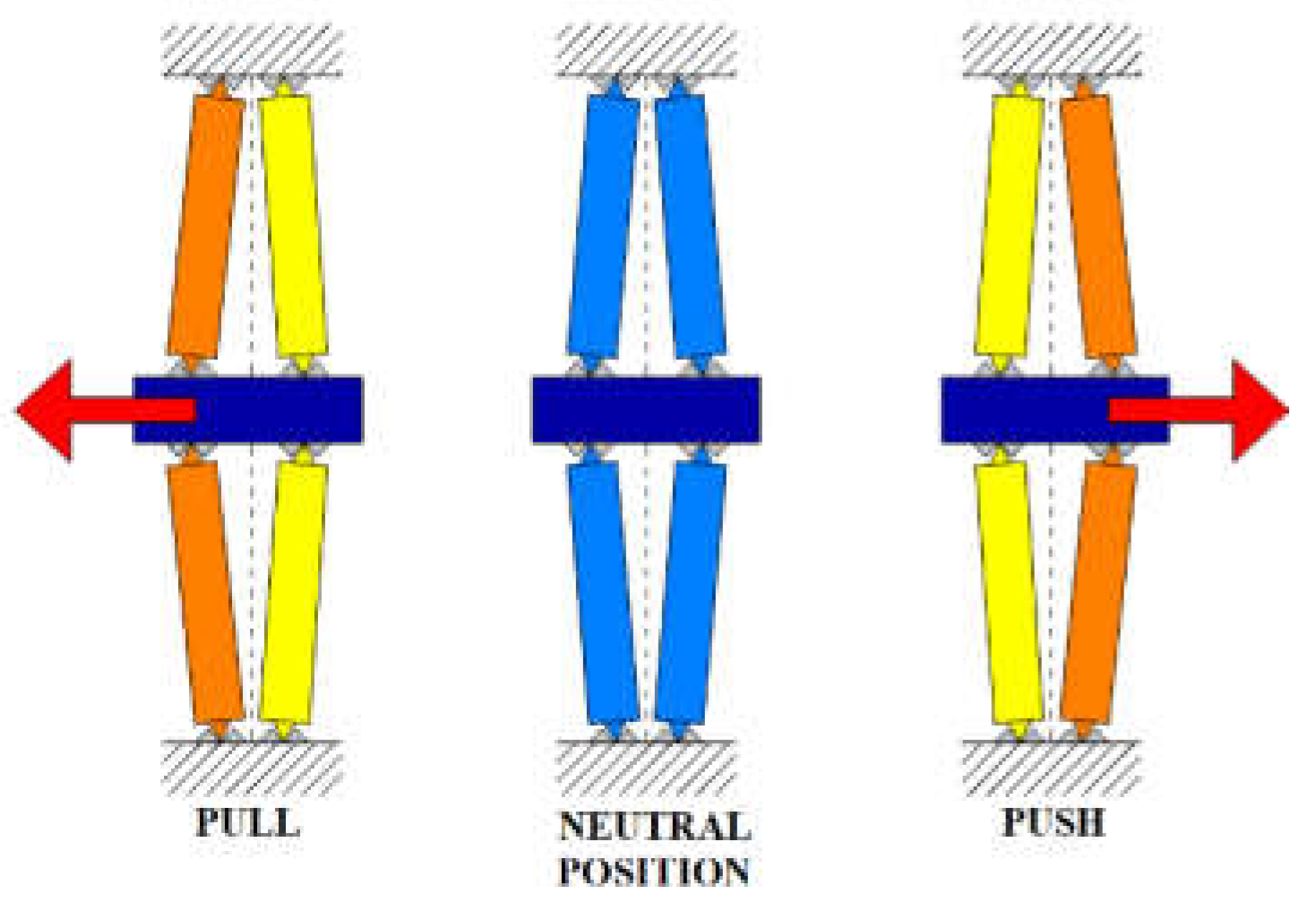
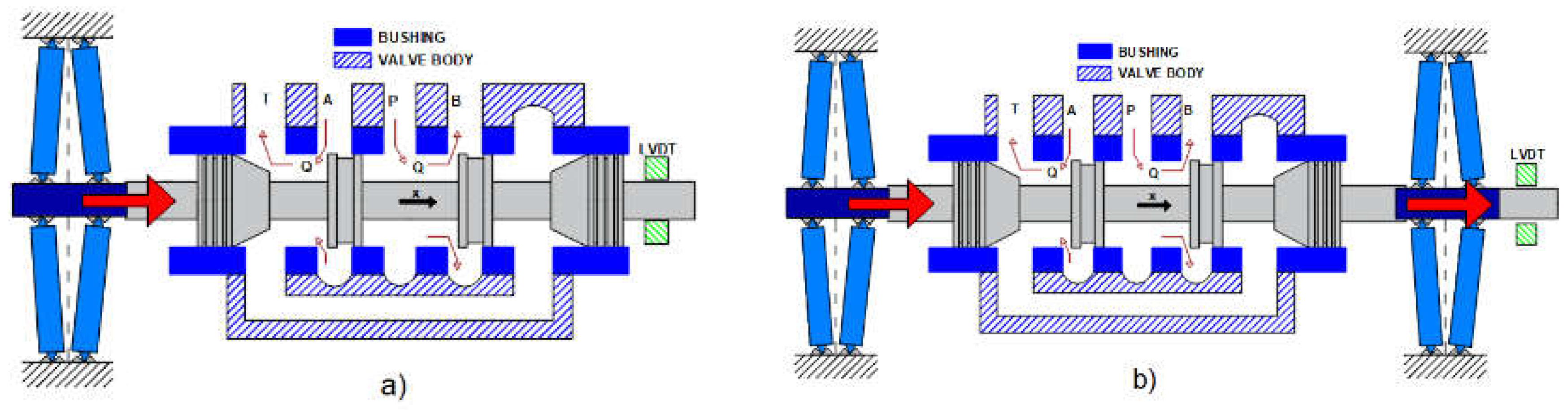
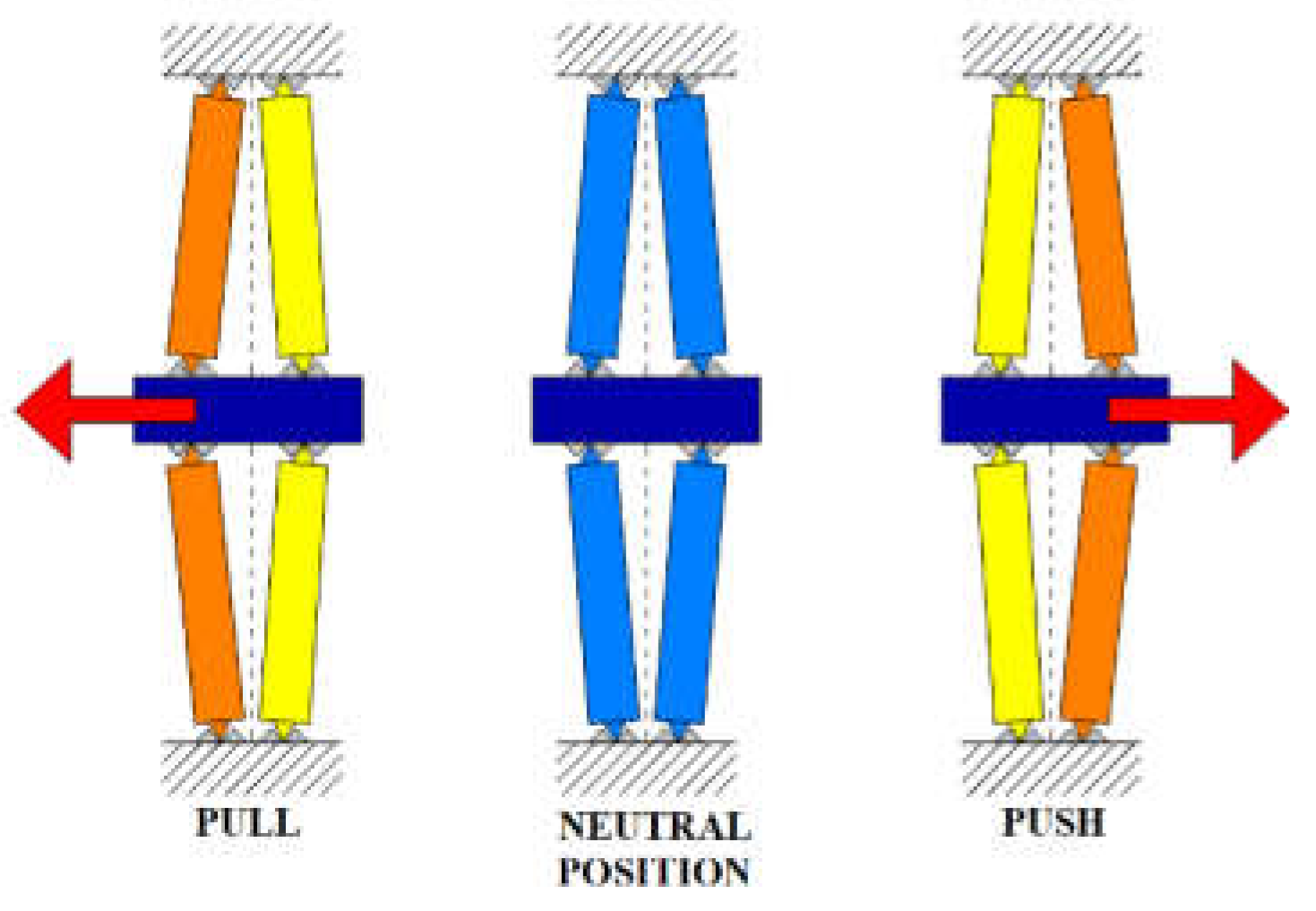
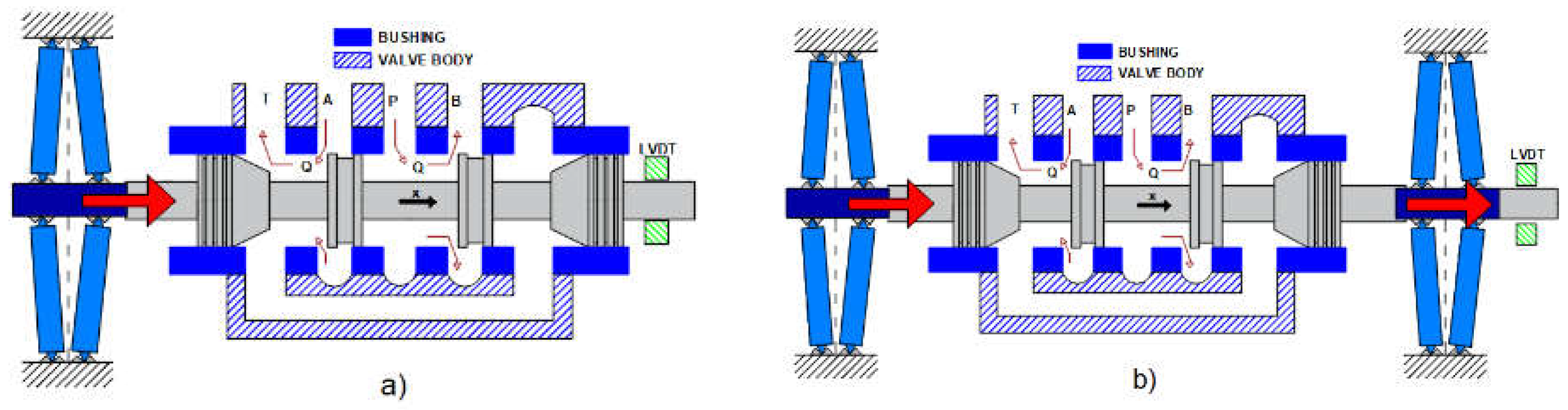
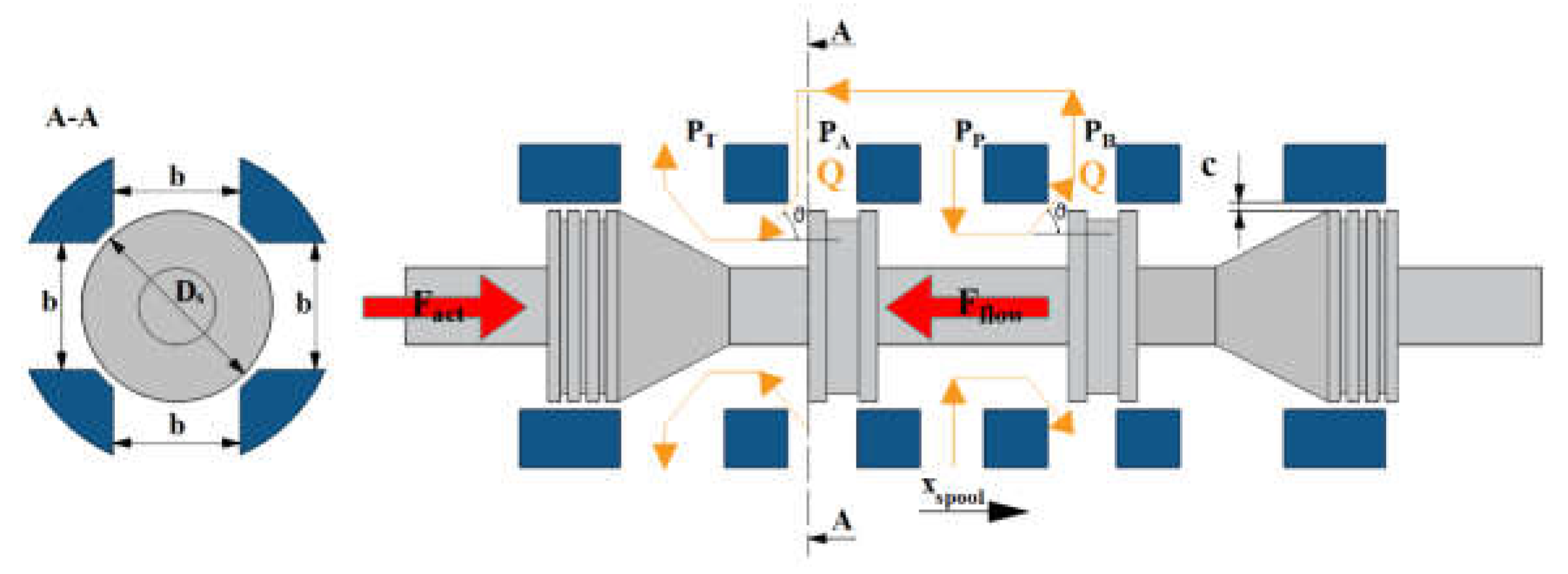
2.1. Direct Drive Servovalve Actuated by Amplified Piezo-Stacks
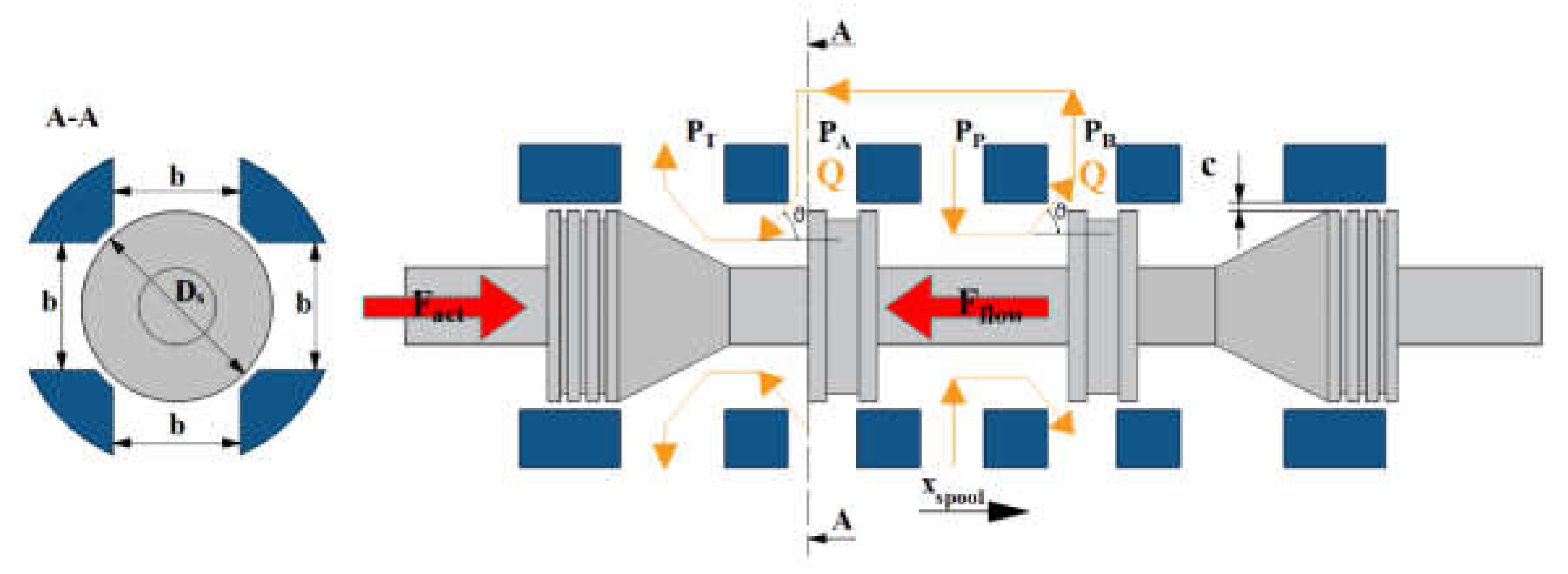
2.2. Numerical Model of the Direct Drive Servovalve Actuated by an Amplified Piezo-Stack
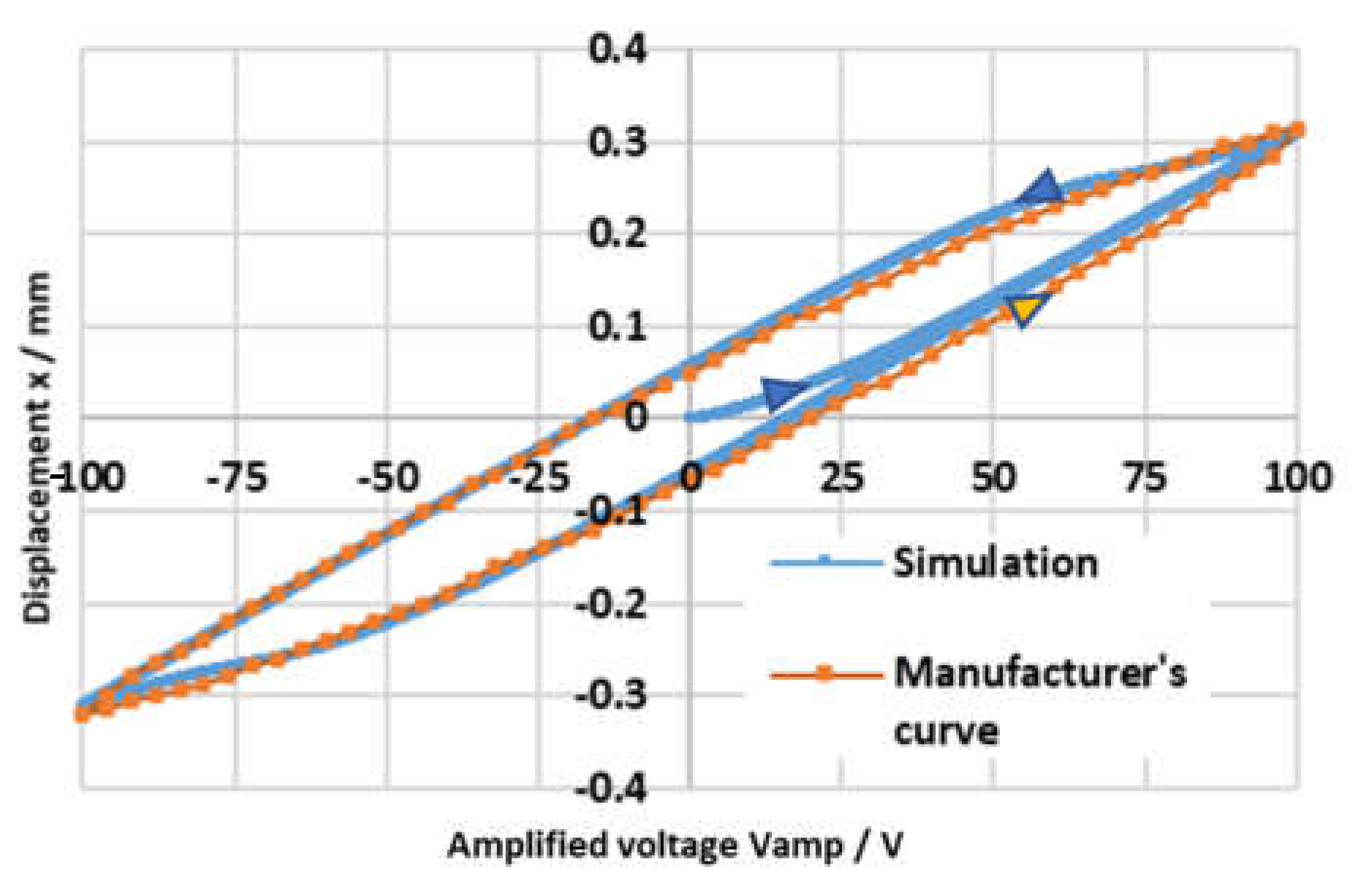
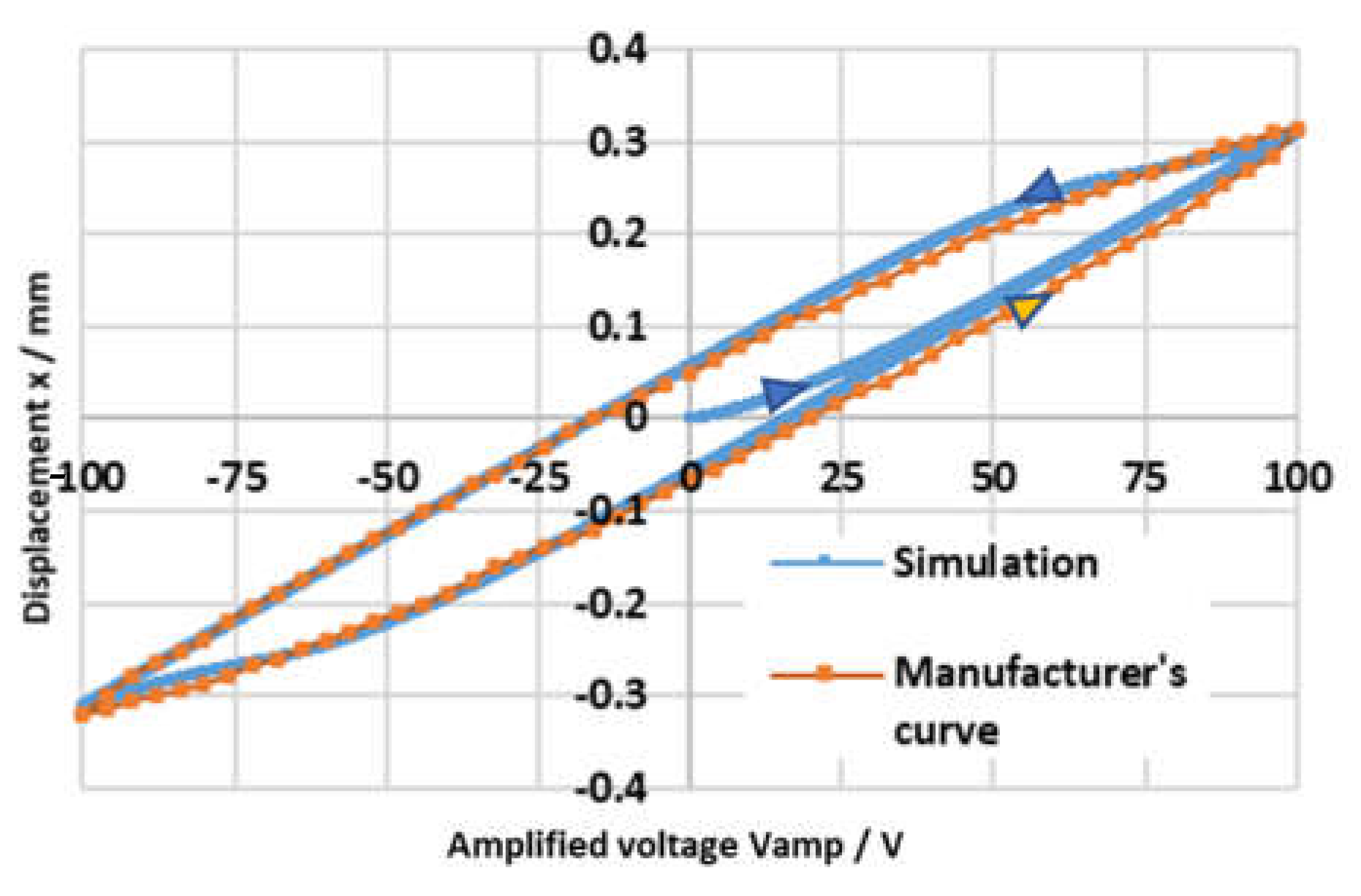
3. Results
4. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Tamburrano, P.; Plummer, A.R.; Distaso, E.; Amirante, R. A review of electro-hydraulic servovalve research and development. Int. J. Fluid Power 2018, 20, 1–23. [Google Scholar] [CrossRef]
- Plummer, A.R. Electrohydraulic servovalves—Past, present, and future. In Proceedings of the 10th International Fluid Power Conference, Dresden, Germany, 8–10 March 2016; pp. 405–424. [Google Scholar]
- Peng, J.; Li, S.; Han, H. Damping properties for vibration suppression in electrohydraulic servo-valve torque motor using magnetic fluid. Appl. Phys. Lett. 2014, 104, 171905. [Google Scholar] [CrossRef]
- Kang, J.; Yuan, Z.; Sadiq, M.T.T. Numerical Simulation and Experimental Research on Flow Force and Pressure Stability in a Nozzle-Flapper Servo Valve. Process 2020, 8, 1404. [Google Scholar] [CrossRef]
- Yang, H.; Xu, Y.; Chen, Z.; Wang, W.; Aung, N.Z.; Li, S. Cavitation suppression in the nozzle-flapper valves of the aircraft hydraulic system using triangular nozzle exits. Aerosp. Sci. Technol. 2021, 112, 106598. [Google Scholar] [CrossRef]
- Saha, B.K.; Peng, J.; Li, S. Numerical and Experimental Investigations of Cavitation Phenomena Inside the Pilot Stage of the Deflector Jet Servo-Valve. IEEE Access 2020, 8, 64238–64249. [Google Scholar] [CrossRef]
- Saha, B.K.; Wu, Y.; Li, S. Deflector Optimization in reducing cavitation intensity in the pilot stage of deflector jet servo-valve. In Proceedings of the 2019 IEEE 8th International Conference on Fluid Power and Mechatronics (FPM), Wuhan, China, 10–13 April 2019; pp. 1500–1507. [Google Scholar]
- Liu, C.; Wang, Y.; Pan, T.; Zheng, G. Fault diagnosis of electro-hydraulic servo valve using extreme learning machine. Int. Trans. Electr. Energy Syst. 2020, 30, 12419. [Google Scholar] [CrossRef]
- Available online: http://www.moog.com/products/servovalves-servo-proportional-valves.html (accessed on 1 September 2019).
- Available online: https://www.moog.com/literature/ICD/Moog-Valves-D633_D634-Catalog-en.pdf (accessed on 1 September 2019).
- Meng, B.; Xu, H.; Liu, B.; Dai, M.; Zhu, C.; Li, S. Novel Magnetic Circuit Topology of Linear Force Motor for High Energy Utilization of Permanent Magnet: Analytical Modelling and Experiment. Actuators 2021, 10, 32. [Google Scholar] [CrossRef]
- Sui, L.; Xiong, X.; Shi, G. Piezoelectric Actuator Design and Application on Active Vibration Control. Phys. Procedia 2012, 25, 1388–1396. [Google Scholar] [CrossRef] [Green Version]
- Rakotondrabe, M.; Ivan, I.; Stihi, V.; Noveanu, S.; Minca, E. Design and modeling of a piezoelectrically actuated microvalve. Rom. J. Phys. 2011, 56, 141–149. [Google Scholar]
- Noliac. Available online: http://www.noliac.com/products/actuators/platestacks/ (accessed on 1 September 2017).
- Najafabadi, H.H.; Rezaei, S.M.; Ghidary, S.S.; Zareinejad, M.; Razi, K.; Seifabadi, R. Hysteresis compensation of piezoelectric actuators under dynamic load condition. In Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Diego, CA, USA, 29 October–2 November 2007; pp. 1166–1171. [Google Scholar]
- Bertin, M.J.F.; Plummer, A.; Bowen, C.; Johnston, D.N. An Investigation of Piezoelectric Ring Benders and Their Potential for Actuating Servo Valves. In Proceedings of the ASME/BATH 2014 Symposium on Fluid Power and Motion Control, Bath, UK, 20 November 2014; Volume 6. [Google Scholar]
- Persson, L.J.; Plummer, A.R.; Bowen, C.R.; Brooks, I. Design and modelling of a novel servovalve actuated by a piezoelectric ring bender. In ASME/BATH 2015 Symposium on Fluid Power and Motion Control; American Society of Mechanical Engineers: New York, NY, USA, 2015; p. V001T01A043. [Google Scholar]
- Cheng, G.M.; Li, P.; Yang, Z.G.; Liu, J.F. Doublenozzle piezoelectric servovalve. Guangxue Jingmi Gong-cheng/Optics and Precision Engineering. Precis. Eng. 2005, 13, 276–282. [Google Scholar]
- Zhu, L.; Shiju, E.; Zhu, X.; Gao, C. Development of Hydroelectric Servo-Valve Based on Piezoelectric Elements. In Proceedings of the 2010 International Conference on Mechanic Automation and Control Engineering, Wuhan, China, 26–28 June 2010; pp. 3330–3333. [Google Scholar]
- Tamburrano, P.; Plummer, A.R.; De Palma, P.; Distaso, E.; Amirante, R. A Novel Servovalve Pilot Stage Actuated by a Piezo-electric Ring Bender: A Numerical and Experimental Analysis. Energies 2020, 13, 671. [Google Scholar] [CrossRef] [Green Version]
- Tamburrano, P.; Plummer, A.R.; De Palma, P.; Distaso, E.; Amirante, R. A Novel Servovalve Pilot Stage Actuated by a Piezo-Electric Ring Bender (Part II): Design Model and Full Simulation. Energies 2020, 13, 2267. [Google Scholar] [CrossRef]
- Zsurzsan, T.G.; Mangeot, C.; Andersen, M.A.; Zhang, Z.; Andersen, N.A. Piezoelectric stack actuator parameter extraction with hysteresis compensation. In Proceedings of the2014 16th European Conference on Power Electronics and Applications, Lappeenranta, Finland, 26–28 August 2014; pp. 1–7. [Google Scholar]
- Pluta, J.; Sibielak, M. Testing of Throttle Valve Prototype Controlled by Piezoelectric Stack. Solid State Phenom. 2011, 177, 47–64. [Google Scholar] [CrossRef]
- Branson, D.T.; Wang, F.C.; Johnston, D.N.; Tilley, D.G.; Bowen, C.R.; Keogh, P.S. Piezoelectrically actuated hydraulic valve design for high bandwidth and low performance. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2011, 225, 345–359. [Google Scholar]
- Lindler, J.E.; Anderson, E.H. Piezoelectric direct drive servovalve. In Smart Structures and Materials 2002: Industrial and Commercial Applications of Smart Structures Technologies; International Society for Optics and Photonics: Bellingham, WA, USA, 2002; Volume 4698, pp. 488–496. [Google Scholar] [CrossRef]
- Jeon, J.; Han, C.; Han, Y.-M.; Choi, S.-B. A new type of a direct-drive valve system driven by a piezostack actuator and sliding spool. Smart Mater. Struct. 2014, 23, 075002. [Google Scholar] [CrossRef]
- Tamburrano, P.; De Palma, P.; Plummer, A.R.; Distaso, E.; Amirante, R. Feasibility study of using amplified pie-zo-stack actuators for the actuation of direct drive servovalves. In E3S Web of Conferences; EDP Sciences: Les Ulis, France, 2020; Volume 197, p. 07004. [Google Scholar]
- Mathworks. Matlab & Simulink. In SimscapeTM User’s Guide R2018a; Mathworks: Natick, MA, USA, 2018. [Google Scholar]
- Merritt, H. Hydraulic Control System; John Wiley and Sons: Hoboken, NJ, USA, 1967. [Google Scholar]
- Stringer, J.D. Hydraulic Systems Analysis: An Introduction; Macmillan Publishers Limited Palgrave: London, UK, 1976. [Google Scholar]
- Tamburrano, P.; Plummer, A.R.; Elliott, P.; Morris, W.; Page, S.; Distaso, E.; Amirante, R.; De Palma, P. 2D CFD Analysis of Servovalve Main Stage Internal Leakage. In ASME/BATH 2019 Symposium on Fluid Power and Motion Control; ASME International: Geauga, OH, USA, 2019; Volume 59339, p. V001T01A051. [Google Scholar]
- Available online: https://politecnicobari-my.sharepoint.com/:u:/g/personal/paolo_tamburrano_poliba_it/EdcZKi4aDPJJptxQpoG88HoBWbv6NLEbBIy54wunDmHl-w?e=PZbgch (accessed on 28 June 2021).
- Di Rito, G. Experiments and CFD Simulations for the Characterisation of the Orifice Flow in a Four-Way Servovalve. Int. J. Fluid Power 2007, 8, 37–46. [Google Scholar] [CrossRef]
- Tamburrano, P.; Plummer, A.R.; Distaso, E.; Amirante, R. A Review of Direct Drive Proportional Electrohydraulic Spool Valves: Industrial State-of-the-Art and Research Advancements. J. Dyn. Syst. Meas. Control 2019, 141, 020801. [Google Scholar] [CrossRef]
- Henke, A.; Kümmel, M.; Wallaschek, J. A piezoelectrically driven wire feeding system for high performance wedge-wedge-bonding machines. Mechatronics 1999, 9, 757–767. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Unit | NAC2641 | NAC2643 | NAC2645 |
|---|---|---|---|---|
| Length × Width × Height | mm | 14 × 70.5 × 26.1 | 14 × 102.4 × 28 | 14 × 134.2 × 30.6 |
| Max. free stroke (working in one direction), | μm | 300 | 625 | 950 |
| Max. free stroke (working in two directions), | μm | ±150 | ±312.5 | ±475 |
| Stiffness, | N/μm | 1.3 | 0.9 | 0.7 |
| Max. blocking force, | N | 195 | 281 | 332 |
| Max. actuation force at 20 °C, | N | 250 | 250 | 250 |
| Max. actuation force at 50 °C, | N | 200 | 200 | 200 |
| Overall mass, | g | 84 | 122 | 160 |
| Capacitance, Cap | μF | 7.2 | 13 | 20 |
| Parameter | Symbol | Unit | Value |
|---|---|---|---|
| Spool diameter | mm | 15 | |
| Spool length | mm | 50 | |
| Width of the slots | b | mm | 31.42 |
| Spool mass | g | 30 | |
| Spool damping coefficient | Ns/m | 15 | |
| Clearance | c | μm | 3 |
| Leakage area | mm2 | 0.09425 | |
| Discharge coefficient | CD | - | 0.7 |
| Flow angle | θ | deg | 69 |
| Oil density (ISO VG 32 at 50 °C) | kg/m3 | 851 | |
| Max. blocking force | Fb,max | N | 332 |
| Stiffness of the piezo-actuator | kp | N/m | 700,000 |
| Capacitance | Cap | μF | 20 |
| Maximum current | Imax | A | 1 |
| Gain of the amplifier | Ka | - | 20 |
| Maximum amplified voltage | Vmax | V | 100 |
| Hysteresis parameter | - | 0.7 | |
| Hysteresis parameter | β | - | 0.013 |
| Hysteresis parameter | δ | - | 0.03 |
| Hysteresis parameter | Kb | - | 1.19 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tamburrano, P.; Distaso, E.; Plummer, A.R.; Sciatti, F.; De Palma, P.; Amirante, R. Direct Drive Servovalves Actuated by Amplified Piezo-Stacks: Assessment through a Detailed Numerical Analysis. Actuators 2021, 10, 156. https://doi.org/10.3390/act10070156
Tamburrano P, Distaso E, Plummer AR, Sciatti F, De Palma P, Amirante R. Direct Drive Servovalves Actuated by Amplified Piezo-Stacks: Assessment through a Detailed Numerical Analysis. Actuators. 2021; 10(7):156. https://doi.org/10.3390/act10070156
Chicago/Turabian StyleTamburrano, Paolo, Elia Distaso, Andrew R. Plummer, Francesco Sciatti, Pietro De Palma, and Riccardo Amirante. 2021. "Direct Drive Servovalves Actuated by Amplified Piezo-Stacks: Assessment through a Detailed Numerical Analysis" Actuators 10, no. 7: 156. https://doi.org/10.3390/act10070156
APA StyleTamburrano, P., Distaso, E., Plummer, A. R., Sciatti, F., De Palma, P., & Amirante, R. (2021). Direct Drive Servovalves Actuated by Amplified Piezo-Stacks: Assessment through a Detailed Numerical Analysis. Actuators, 10(7), 156. https://doi.org/10.3390/act10070156