Experimental and Analytical Study of Secondary Path Transfer Function in Active Hydraulic Mount with Solenoid Actuator


Abstract
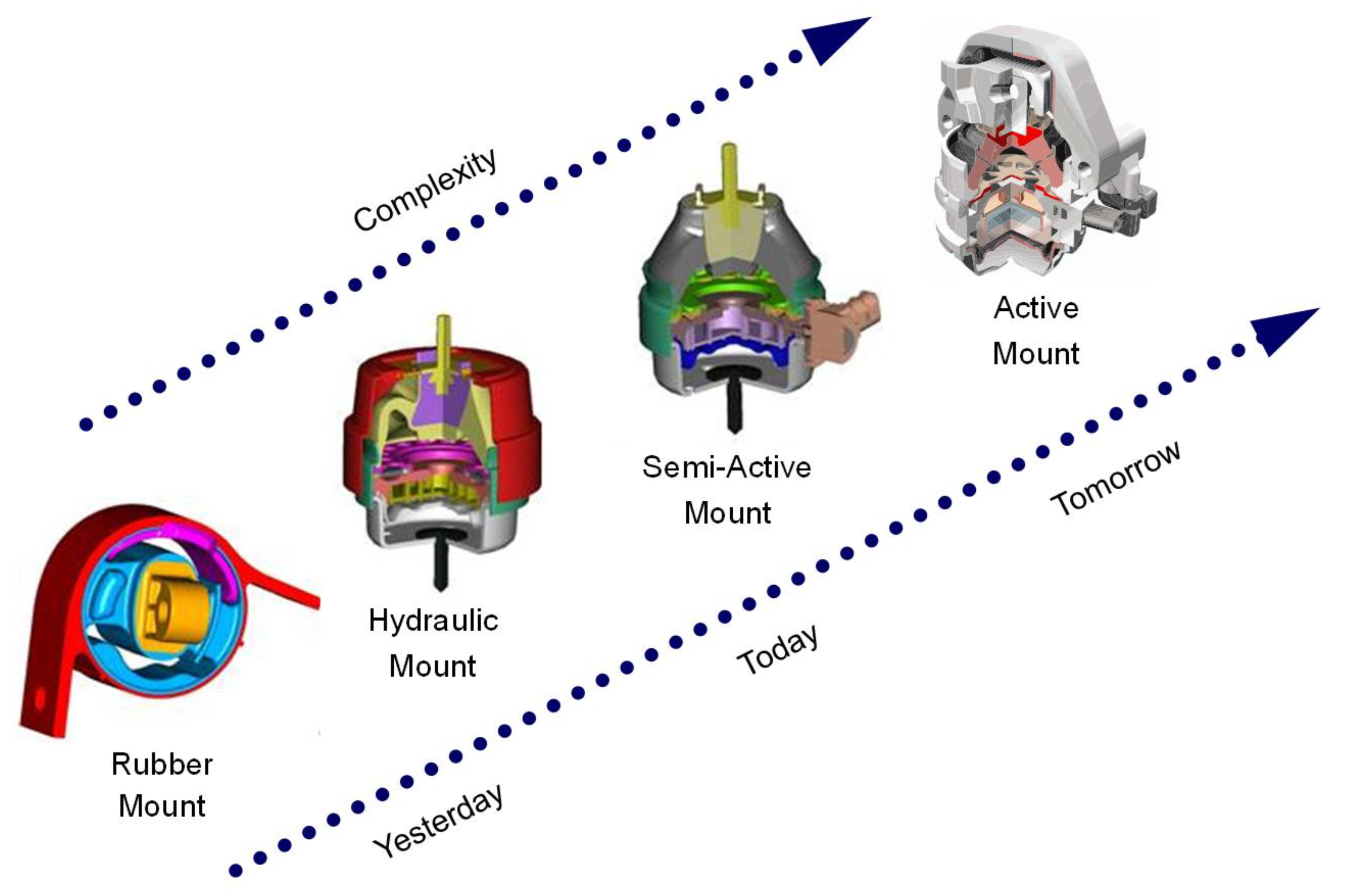
:1. Introduction
2. Working Mechanism of the Active Hydraulic Mount with Solenoid Actuator
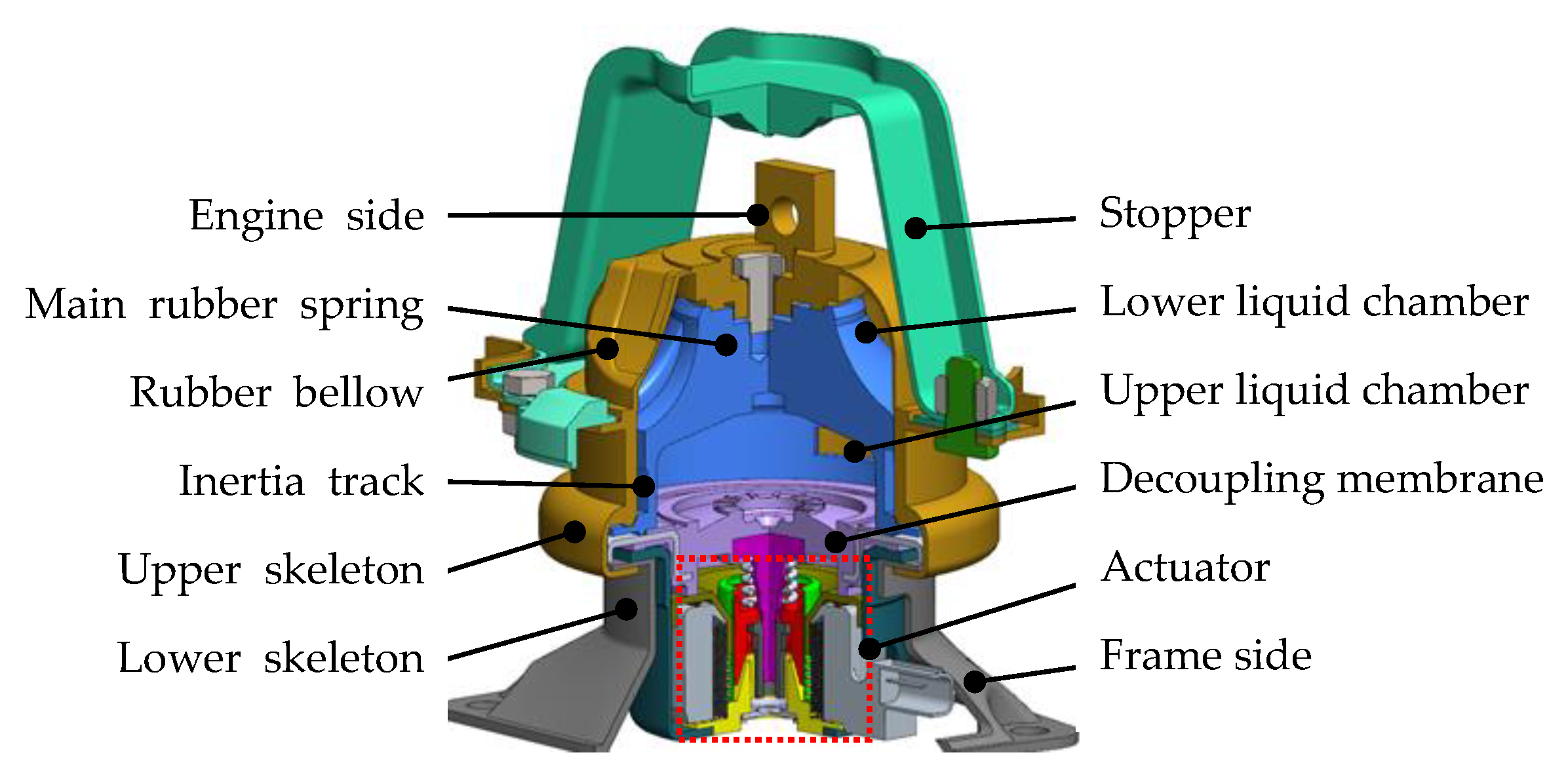
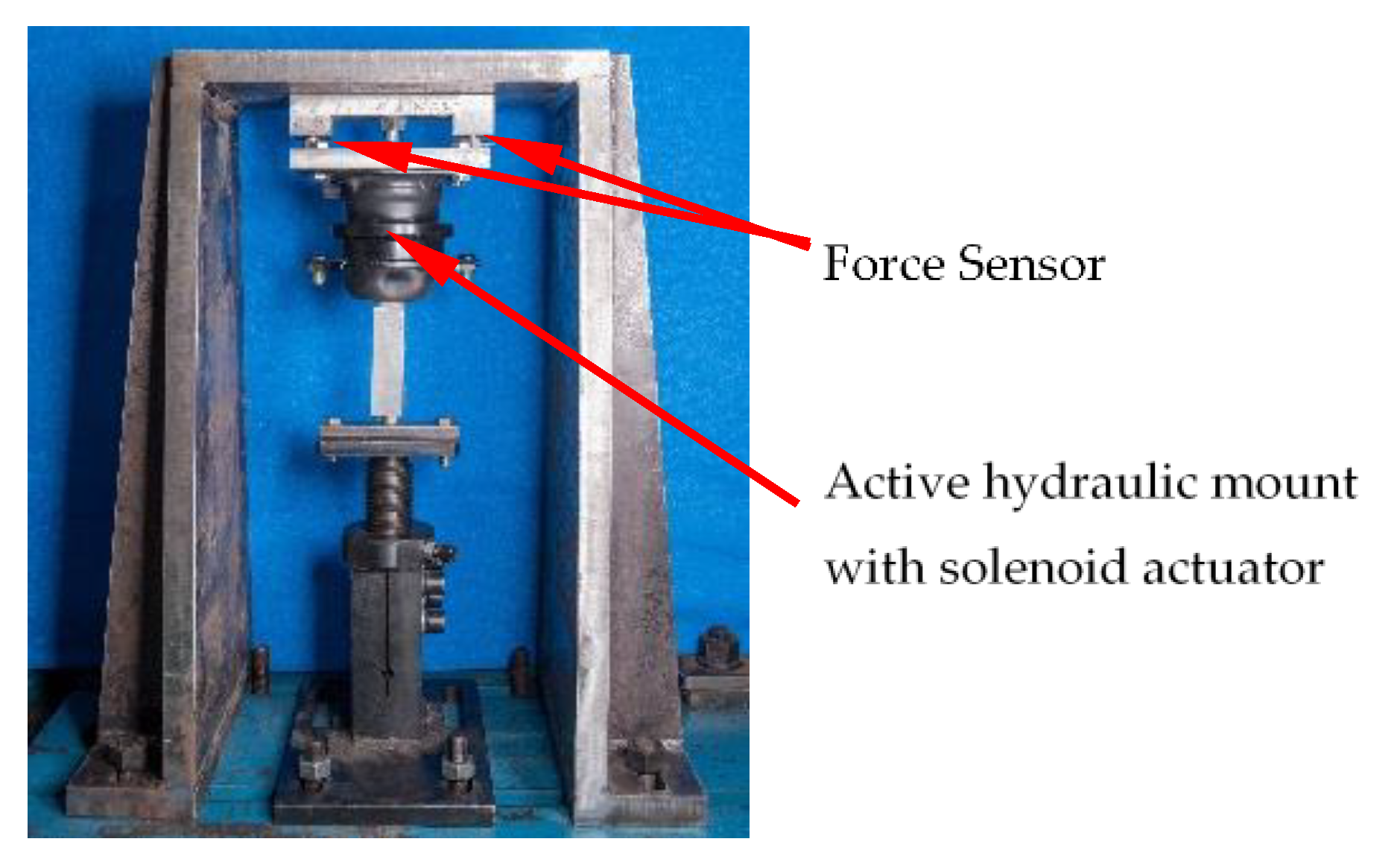
2.1. Structure of Active Hydraulic Mount
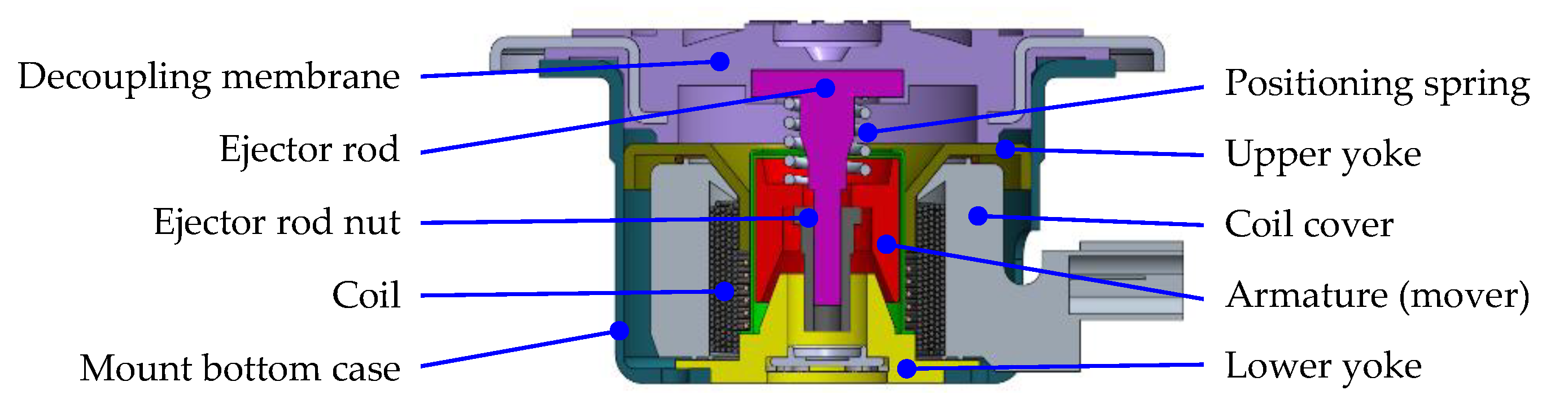
2.2. Structure and Working Principle of Solenoid Actuator
3. Active Characteristics of Active Hydraulic Mount
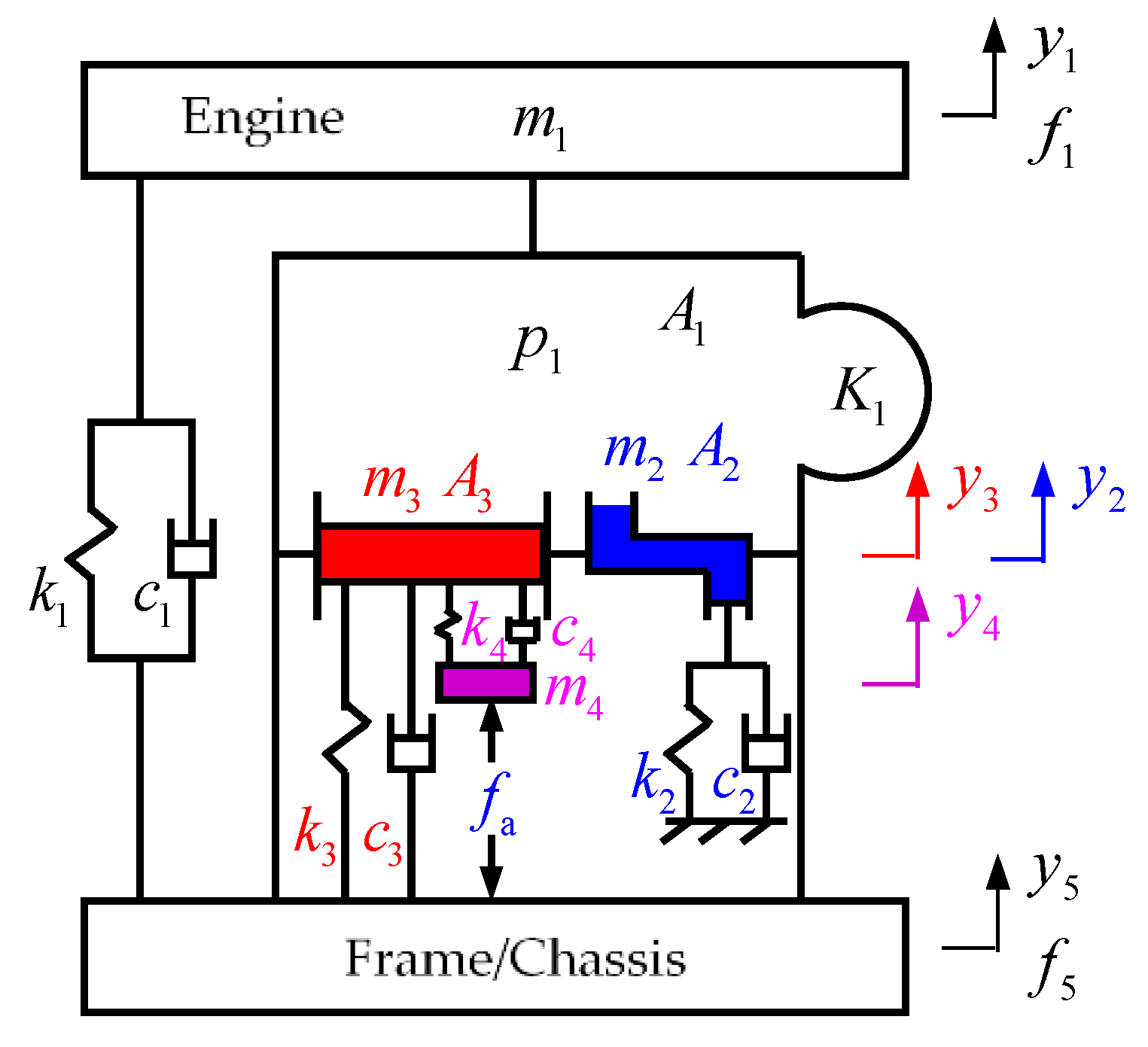
3.1. Model of Active Characteristic
3.2. Analysis of Active Characteristic
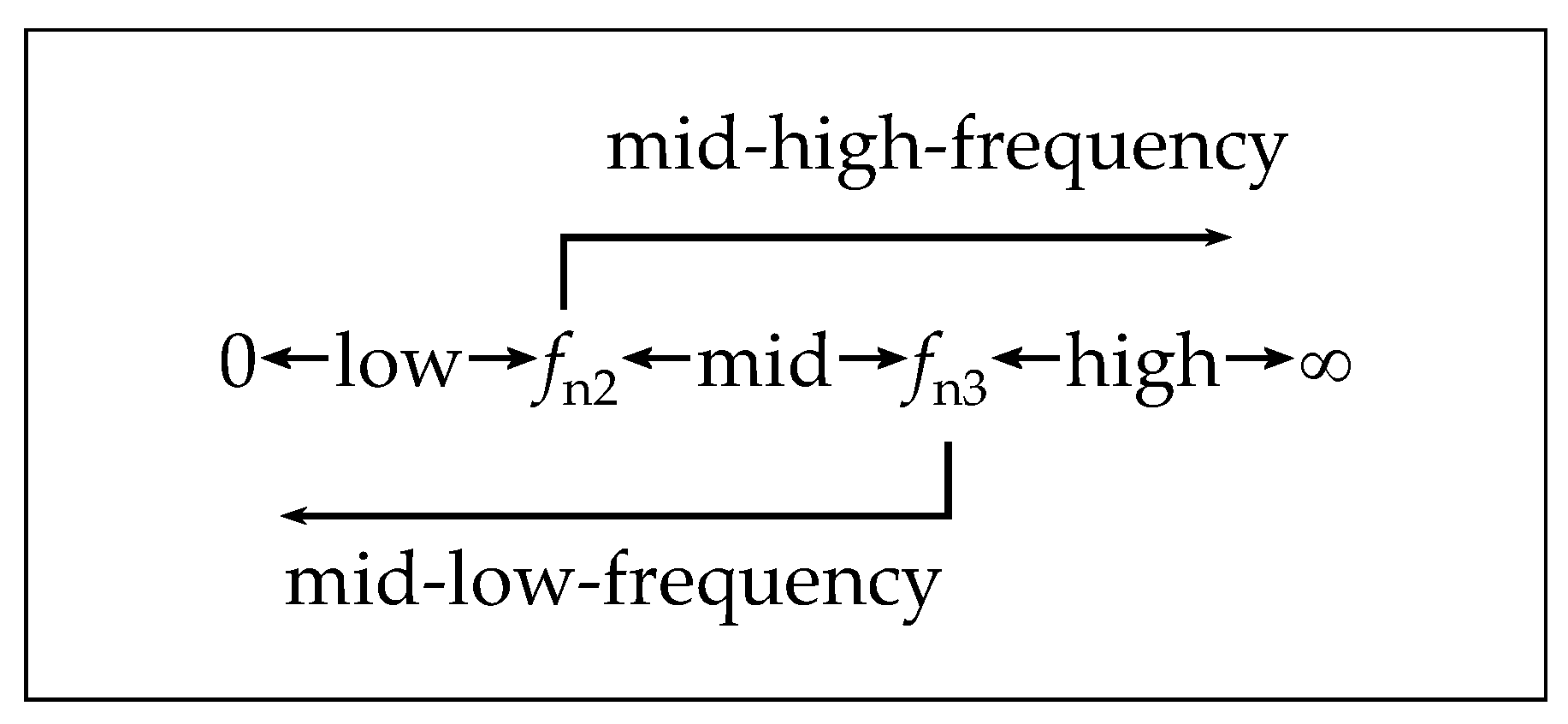
3.2.1. Frequency Response Characteristics of Engine Side Restraining Reaction Force f1 in the Mid-High-Frequency Band
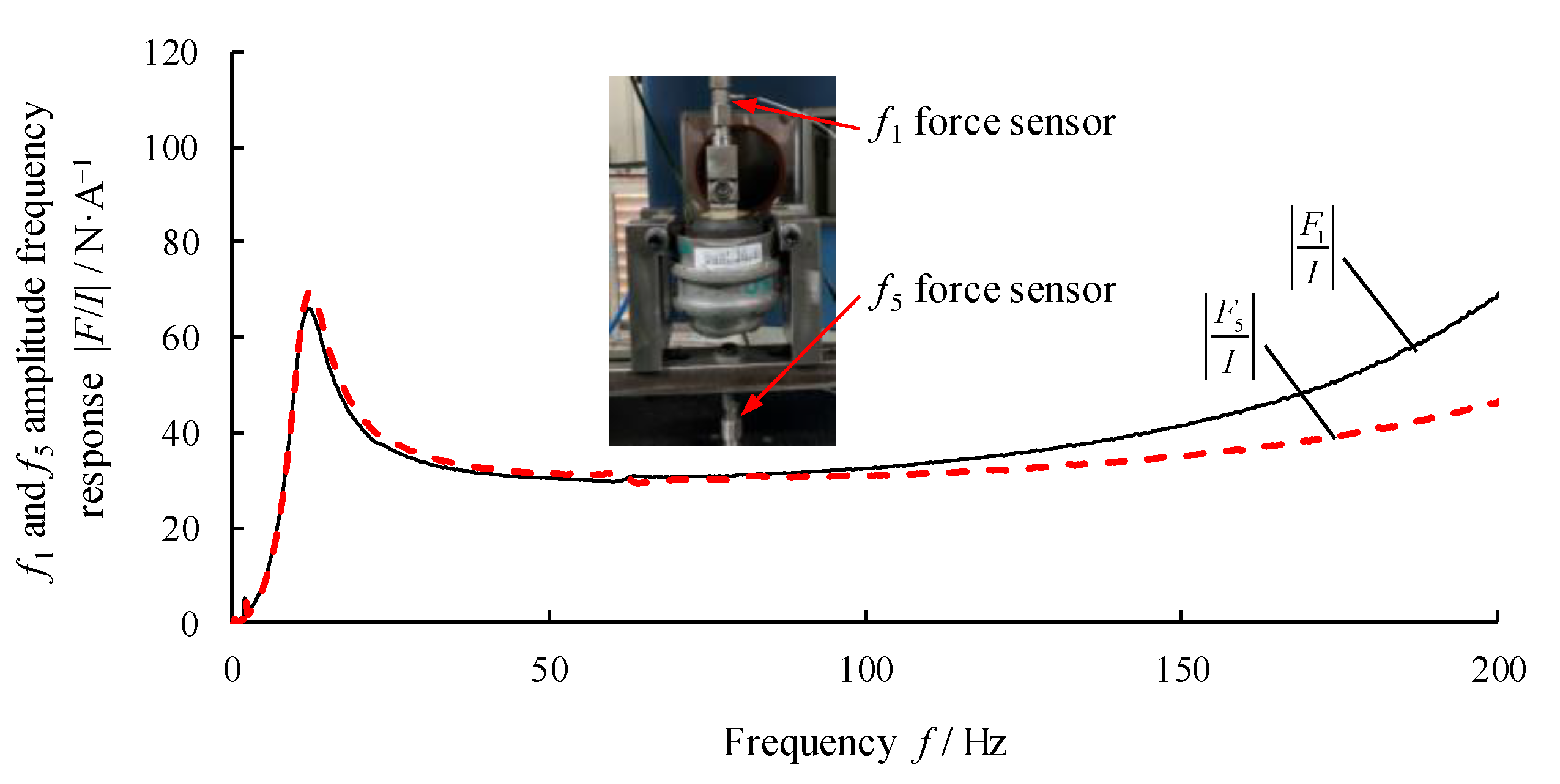
3.2.2. Frequency Response Characteristics of the Force f5 Transferred to the Frame Side in the Mid-High-Frequency Band
4. Actuating Force of Solenoid Actuator
4.1. Alternating Suction Force of Electromagnet
4.2. Alternating Suction Force of the Cone Air Gap Solenoid
4.3. Frequency Response Characteristics of Full-Wave-Rectified Current Excitation
5. Experimental of Secondary Path Transfer Function in Active Hydraulic Mount with Solenoid Actuator
6. Conclusions
- (1)
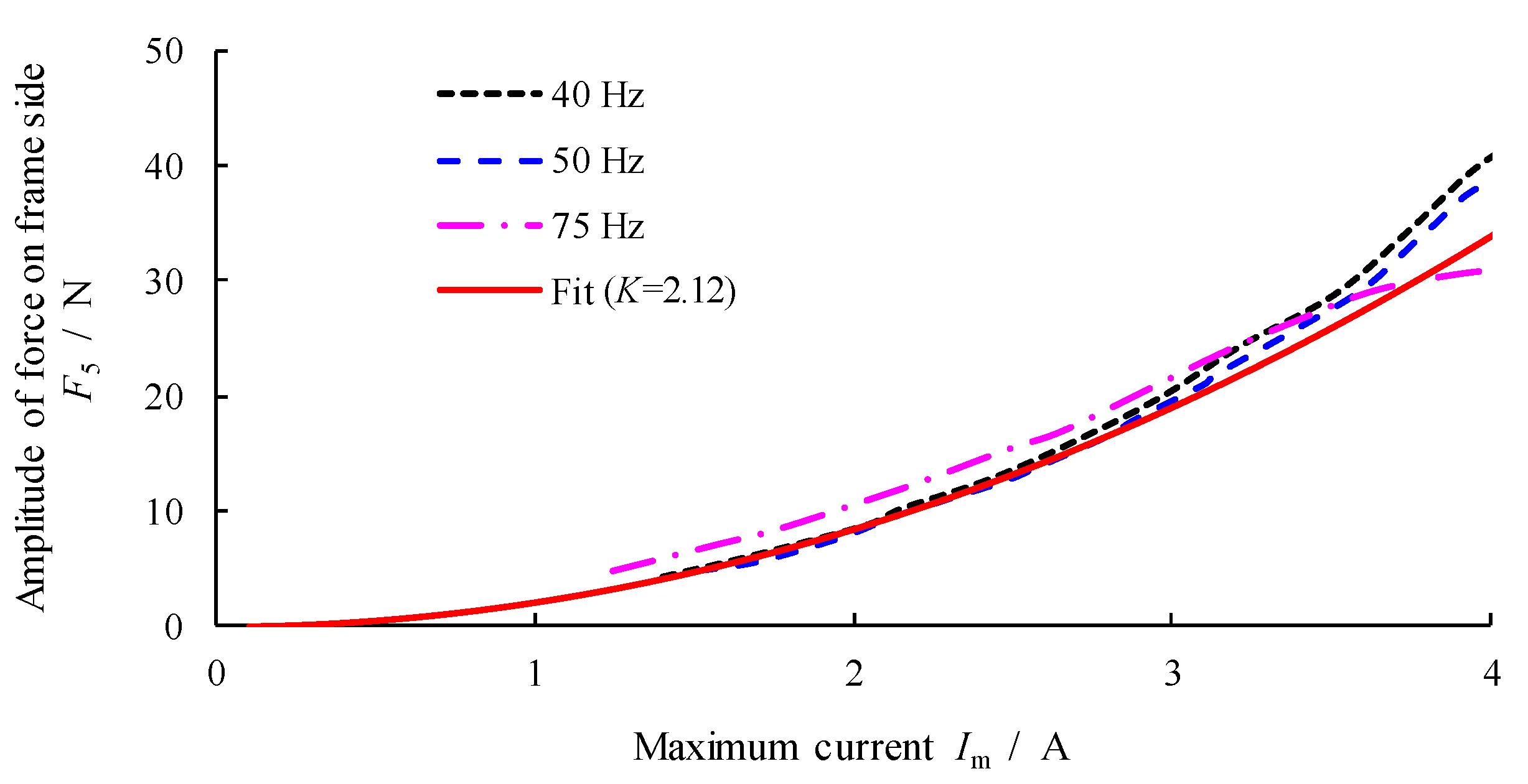
- In the active hydraulic mount with the inertial track-decoupling membrane hydraulic mount as the carrier, the transfer function of the active power of the actuator to the force on the frame side is constant in the mid-frequency band, which is equivalent to the proportional link.
- (2)
- Under the action of harmonic current of solenoid actuator, the frequency of its alternating suction force is twice the frequency of current, and the amplitude of alternating suction force is independent of frequency. Under the action of full-wave-rectified current, the frequency of the current is the same as the second harmonic component of the main component of the alternating suction force, which is convenient to calculate and test the frequency response function in the approximate sense.
- (3)
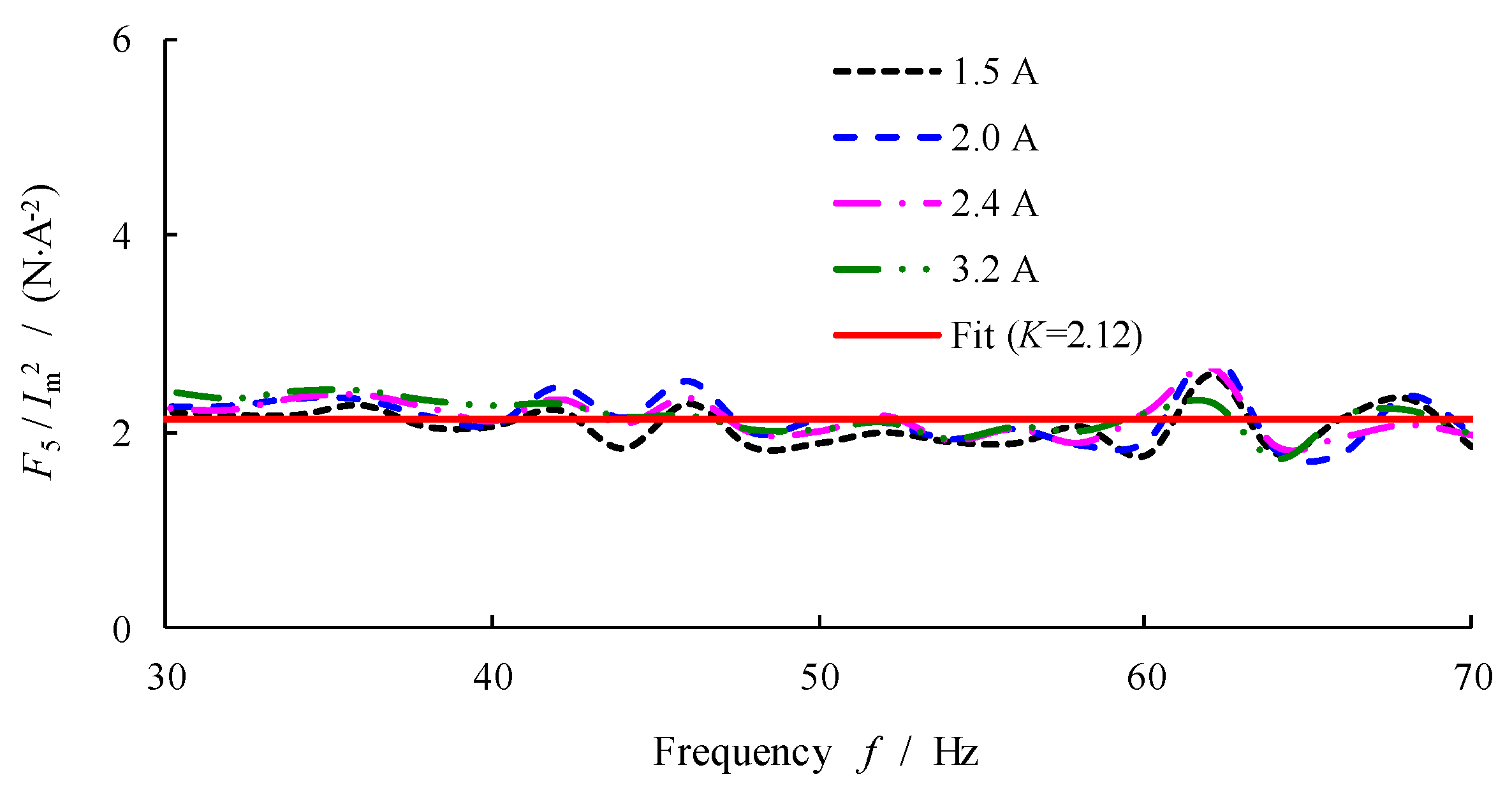
- The analysis and experiment verify that the transfer function of the solenoid actuator from the full-wave-rectified current to the force on the frame side is constant, which not only provides convenience for active control, but also eliminates the tedious testing of the parameters related to the traditional hydraulic mount, reduces the error links, and improves the accuracy of the transfer function.
- (4)
- The next step will be to study a full-wave-rectified current shaping technology to eliminate its high-order harmonic components, so as to obtain higher-precision transfer function, which is conducive to active control.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Fan, R.L.; Fei, Z.N.; Qu, S.J.; Shao, J.Y.; Song, P.J. Experimental study about the effect of powertrain mounting system on vehicle interior noise. Eng. Mech. 2019, 36, 205–212. (In Chinese) [Google Scholar]
- Sun, G.C. Study on the Key Technology in Active Vibration Control of Automobile Power-Train. Ph.D. Thesis, Jilin University, Changchun, China, 2007. (In Chinese). [Google Scholar]
- Min, H.T.; Shi, W.K.; Lin, Y.; Cheng, M. Dynamic characteristic simulation and experimental study on a semi-active powertrain mount. Automob. Technol. 2007, 2007, 34–38. (In Chinese) [Google Scholar]
- Cai, J. A Study of the Isolation Characteristics of the Active Control hydraulic Mount with Electromagnetic-Actuator. Master’s Thesis, Jilin University, Changchun, China, 2005. (In Chinese). [Google Scholar]
- Lee, Y.W.; Lee, C.W. Dynamic analysis and control of an active engine mount system. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2002, 216, 921–931. [Google Scholar] [CrossRef]
- Liang, T.Y.; Shi, W.K.; Tang, M.X. The summary of study in engine mount. Noise Vib. Control 2007, 27, 6–10. (In Chinese) [Google Scholar]
- Xiang, H.G.; Chen, D.G.; Li, X.W.; Wu, R.; Liu, H.; Geng, Y. Construction of equivalent magnetic circuit for electromagnet based on 3-d magnetic field. J. Xi’an Jiaotong Univ. 2003, 37, 808–811. (In Chinese) [Google Scholar]
- Mei, L.; Liu, J.L.; Fu, Z.Y. Calculation of electromagnet attractive force and simulation analysis. Micromotors 2012, 45, 6–9. (In Chinese) [Google Scholar]
- Lee, B.H.; Lee, C.W. Model based feed-forward control of electromagnetic type active control engine-mount system. J. Sound Vib. 2009, 323, 574–593. [Google Scholar] [CrossRef]
- Nakaji, Y.; Satoh, S.; Kimura, T.; Hamabe, T.; Akatsu, Y.; Kawazoe, H. Development of an active control engine mount system. Veh. Syst. Dyn. Int. J. Veh. Mech. Mobil. 1999, 32, 185–198. [Google Scholar] [CrossRef]
- Fan, R.L.; Lu, Z.H. Fixed points on the nonlinear dynamic properties of hydraulic engine mounts and parameter identification method: Experiment and theory. J. Sound Vib. 2007, 305, 703–727. [Google Scholar] [CrossRef]
- Fan, R.-L.; Fei, Z.-N.; Zhou, B.-Y.; Gong, H.-B.; Song, P.-J. Two-step dynamics of a semiactive hydraulic engine mount with four-chamber and three-fluid-channel. J. Sound Vib. 2020, 480, 1–17. [Google Scholar] [CrossRef]
- Hausberg, F.; Christian, S.; Peter, P.; Manfred, P.; Simon, H.; Markus, R. Experimental and analytical study of secondary path variations in active engine mounts. J. Sound Vib. 2015, 340, 22–38. [Google Scholar] [CrossRef]
- Fan, R.L.; Lu, Z.H.; Liu, L.; Zhu, M.-T. The working principle of the disturbing plate in hydraulic engine mount. Eng. Mech. 2009, 26, 229–234. (In Chinese) [Google Scholar]
- Qing, Z.H.; Jiang, S.Y. Electrotechnician, 7th ed.; Higher Education Press: Beijing, China, 2009. [Google Scholar]
- Wang, Z.W.; Ren, Z.B.; Chang, Z.P.; Liu, J.S.; Cui, P.F. Simulation of the solenoid force based on ANSYS and AMESim. Missiles Space Veh. 2017, 45, 93–97. (In Chinese) [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Name | Value |
|---|---|---|
| c1 | Viscous damping of main rubber spring in vertical direction/N·s·m−1 | N/A |
| c2 | Fluid damping/N·s·m−1 | N/A |
| c3 | Viscous damping of decoupling membrane/N·s·m−1 | 19.5 |
| c4 | Mover damping/N·s·m−1 | 16 |
| k1 | Dynamic stiffness in-phase of main rubber spring in vertical direction/N·m−1 | N/A |
| k2 | Fluid stiffness/N·m−1 | N/A |
| k3 | Dynamic stiffness of decoupling membrane/N·m−1 | 8.025 × 103 |
| k4 | Mover stiffness/N·m−1 | 1.547 × 106 |
| m1 | Mass at engine side/kg | N/A |
| m2 | Mass of fluid in inertia track/kg | N/A |
| m3 | Mass of ejector rod, decoupling membrane and attached liquid/kg | 0.266 |
| m4 | Mass of mover/kg | 7.1 × 10−2 |
| p1 | Pressure fluctuation of upper liquid chamber/Pa | N/A |
| p2 | Pressure fluctuation of lower liquid chamber/Pa | N/A |
| A1 | Equivalent piston area of main rubber spring/mm2 | N/A |
| A2 | Cross-sectional area of inertia track/mm2 | N/A |
| A3 | Decoupling membrane pump liquid piston area/mm2 | 1.3872 × 103 |
| K1 | Dynamic bulk stiffness of Main rubber spring/GN·m−5 | 22.67 |
| K2 | Dynamic bulk stiffness of lower liquid chamber/GN·m−5 | 0 |
| K3 | Dynamic bulk stiffness of decoupling membrane/GN·m−5 | N/A |
| A0 | Cross-sectional area of cone air gap/mm2 | 379.5 |
| N | Number of turns of the coil | 150 |
| R | Total reluctance of the magnetic flux loop/H−1 | N/A |
| Rm | Reluctance of core/H−1 | N/A |
| Rδ | Reluctance of air gap/H−1 | N/A |
| α | Cone angle/deg | 45 |
| dc | Outer diameter of mover/mm | 26.5 |
| di | Inner diameter of mover cone/mm | 14.5 |
| μ0 | Magnetic permeability of vacuum/H·m−1 | 4π × 10−7 |
| δ | Length of air gap/m | N/A |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fan, R.-L.; Dou, Y.-F.; Yao, F.-H.; Qi, S.-Q.; Han, C. Experimental and Analytical Study of Secondary Path Transfer Function in Active Hydraulic Mount with Solenoid Actuator. Actuators 2021, 10, 150. https://doi.org/10.3390/act10070150
Fan R-L, Dou Y-F, Yao F-H, Qi S-Q, Han C. Experimental and Analytical Study of Secondary Path Transfer Function in Active Hydraulic Mount with Solenoid Actuator. Actuators. 2021; 10(7):150. https://doi.org/10.3390/act10070150
Chicago/Turabian StyleFan, Rang-Lin, Yu-Fei Dou, Fang-Hua Yao, Song-Qiang Qi, and Chen Han. 2021. "Experimental and Analytical Study of Secondary Path Transfer Function in Active Hydraulic Mount with Solenoid Actuator" Actuators 10, no. 7: 150. https://doi.org/10.3390/act10070150
APA StyleFan, R.-L., Dou, Y.-F., Yao, F.-H., Qi, S.-Q., & Han, C. (2021). Experimental and Analytical Study of Secondary Path Transfer Function in Active Hydraulic Mount with Solenoid Actuator. Actuators, 10(7), 150. https://doi.org/10.3390/act10070150