1. Introduction
As human space activities increase, the condition of space debris gradually deteriorates, and the probability of collision with spacecrafts in orbit gradually increases [
1,
2,
3,
4]. Among them, large space debris such as rocket upper stages will create a large number of new fragments after the collisions and disintegration, which seriously threatens the safety of orbiting spacecraft. Therefore, the active debris removal (ADR) mission, which include de-tumbling and capture operation, is necessary to carry out. Large space debris is mostly more than 2 m in size [
5]. It is affected by the gravity of the earth, sunlight pressure, and residual angular momentum, and often presents the spin, nutation, and precession mixed motion at around 40 rpm [
6]. So, the knowledge of large debris’ dynamic parameters and inertial properties is crucial for ADR mission.
For the estimation of three-axis tumbling debris’ dynamic parameters, the stereo-vision methods have been widely used. Tweddle et al. [
7,
8] proposed a method to estimate the dynamic parameters of non-cooperative targets based on binocular vision. In this method, aiming at the space proximity operation [
9], the rotation of space debris was modeled by the Euler–Poinsot model, and the estimation of parameters was regarded as SLAM. The linear velocity, angular velocity, mass-center location, and normalized inertia tensor matrix were considered, and the factor graph method was used to establish the solution model. Finally, iSAM (incremental smoothing and mapping) system was used to acquire the corresponding motion and inertia parameters. The effectiveness of this method has been verified by space station experiments [
10]. At the same time, Tweddle analyzed the observability of the binocular vision measurement method and concluded that when measuring the inertia tensor matrix, the rank of the observation matrix is one less than the number of variables. So, normalization is used to quantify inertia tensor. This normalization was also used by many visual measurement methods [
11,
12,
13,
14]. Setterfield et al. [
11,
12] described a procedure of estimating the inertial properties based on stereo vision, and also used Euler–Poinsot to model the rotation of space debris. By considering the relative magnitude of angular momentum and angular kinetic energy, as well as the relative situation of the principal moment of inertia, the motion was divided into seven forms, and two most common cases were considered. By analyzing the geometric properties of the polhode, the optimization equation was established to solve the estimation of the principal axes. The dynamic equation of Euler–Poinsot motion was analyzed and deduced, and the optimization of inertia ratio estimation was solved. Vincenzo Pesce et al. [
13] regarded the relative position, attitude, velocity, angular velocity, and inertia ratio of space debris as state variables, and used a nonlinear state equation to model the dynamic characteristics of non-cooperative targets. He took the motion equation as a process model. The stereo-vision observation equation and Euler dynamic equation were regarded as the observation model. IEKF (iterated extended Kalman filter) was used for the above model. Numerical simulation showed that the method can quickly converge and showed good robustness. QIU et al. [
14] proposed a two-step method to estimate the inertia ratio, attitude, angular velocity and the direction of angular momentum. The EKF (Extended Kalman Filter) was used, and numerical simulations were performed, which showed the accurate estimate. Radar, LIDAR and TOF cameras are also used for the identification of space debris dynamics parameters [
15,
16,
17,
18,
19]. Bai et al. [
15] creates a data-recording model for radar’s two-dimensional (2D) ISAR imaging of rotating objects, and the effectiveness of the algorithms is demonstrated by simulations. For the pose determination of uncooperative targets, Opromolla et al. [
16] proposed a customized three dimensional template matching approach, which is used to obtain initial pose, and ICP algorithm is used for pose tracking. Numerical simulations verify the high accuracy and robustness of the method, but the real-time performance of the algorithm is not better than other algorithms and cannot meet the requirements of the ADR tasks. Based on radar data and time-frequency based signal processing, Ghio et al. [
17] proposed an method that is used to estimate the geometrical and motion parameters of resident space objects located in the LEO region. Furthermore, the high accuracy and high real time performance of the method is demonstrated by simulation. Using the a K-band frequency-modulated continuous-wave radar data, Ghio et al. [
18] identified the size and spin rate of the space objects, and the experimental results proved that the method can be effectively used for identifying spinning space debris characterization. In [
19], Ghio et al. compared the methods relying on inverse radon transform for the estimation of the object’s rotation period.
The above methods are used for Phase I of proximity operation (The phases of the proximity operation are: I—Observing and Planning; II—Final Approaching; III—Impact and Capture; IV—Post-capturing stabilization [
9]), that is, checking the target at a safe distance, obtaining information about the target, and planning the follow-up phase [
11]. In this phase, there is no need for high accuracy, the visual method can achieve good results. However, in the subsequent phases, especially in Phase 3, which include ADR mission, the error of the visual method is unbearable. For example, in Pesce’s work [
13], the convergence value of relative-position error is above 0.4 m. Therefore, the visual method is not suitable for the ADR mission. To solve the problem of Phase III, Qingliang Meng et al. [
20] used binocular vision and a flexible rod with a force–moment sensor to identify the dynamic parameters of non-cooperative targets. In this method, the flexible rod carried by the tracking satellite was used to change the motion of the target, and the force–moment sensor at the end of the flexible rod was used to identify the contact force. The binocular vision was used to identify the changes of the target pose. Using the data, all inertia parameters of space debris, including the mass of space debris that could not be recognized by vision, were estimated. However, this method has some risks: when the target is larger than the tracking satellite, if the flexible rod was exerted on the hole of the target and cannot be pulled out in time, the detection satellite might be temporarily attached to the target, which will cause satellite instability or even loss of control.
To solve the shortcomings of existing methods, an inertial parameter estimation method of non-cooperative targets based on binocular vision and inertial measurement unit (IMU) fusion is proposed in this paper. This method combines the visualization of the visual method and the accuracy of inertial sensors’ measurement, can quickly and accurately estimate dynamic parameters of targets, and convert the parameters to the ADR coordinate system, which is beneficial to calculate direction and magnitude of de-tumbling and capture’s torque. This method refers to I.V.Belokonov’s work [
21] in the use of IMU. I.V.Belokonov assumes that inertial units can be fixed on space debris using nanosatellites, regardless of how to launch and attach the nanosatellites to the debris surface, only the detection process is considered, and the following two hypotheses are made:
- (a)
The mechanical connection of IMU is rigid;
- (b)
Because the measurement time is very short, the perturbation moment has a minimal influence on the motion, and the influence is not considered.
In this paper, we also use the above assumption: the inertial unit can be attached to the surface of space debris using the space harpoon [
22], which has successfully done space experiments. Because the IMUs are generally light, it does not bring too much difficulty to the attachment. In the next section, we will discuss the feasibility of space harpoon attachment, but as this paper is mainly concerned with the subsequent identification of the dynamical parameters, the feasibility of spatial harpoon attachment will not be discussed much. Furthermore, to simplify the image matching, light markers are set on the surface of IMUs.
In this paper, a novel identification algorithm of large debris’ dynamic parameters is proposed. First, we introduce the dynamic model, including the coordinate systems, parameterizations of rotation and the form of space debris’ motion. Because the IMUs are interfered with by the space environment and produce large measurement noise, the denoising model based on linear least-squares manners is established, and the normalized inertia tensor is calculated in this process. Using the denoising data of IMU, supplementing with visual data, the mass-center location and normalized angular momentum are estimated based on the dynamic model of debris, and the ADR data set is established. The simulations and experiments of identifying dynamic parameters were carried out, and the results prove the real-time and high precision of our method.
4. Simulations of Dynamic Parameters’ Identification
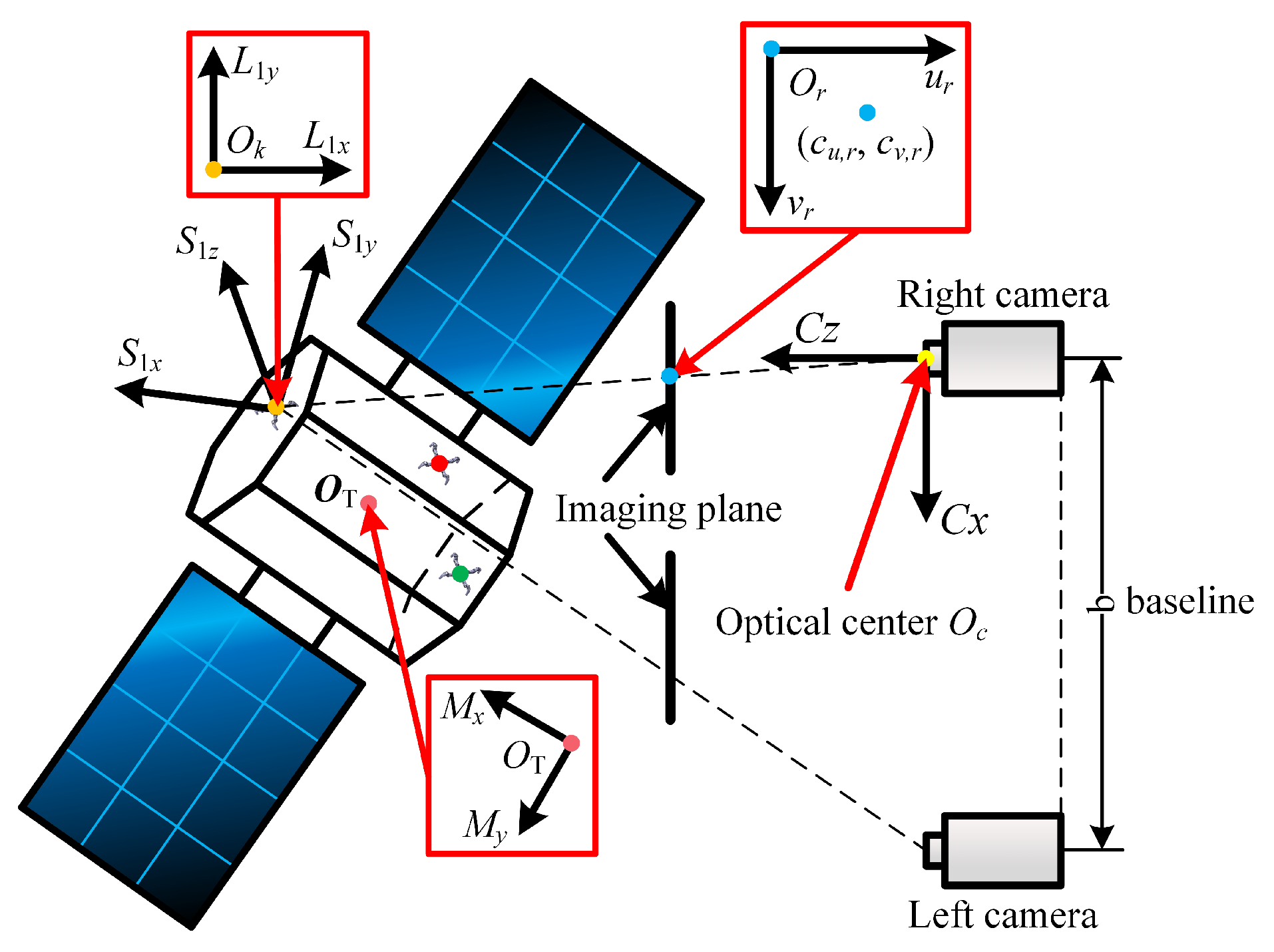
To reduce the processing difficulty of experimental equipment, realize the synchronization of simulations and experiments, we set a large space debris’ simulation model of 2 m × 2 m × 2 m, and attach masses to change the model’s mass distribution (the normalized principal moments of inertia are 2.6, 2, 1). The mass center of the debris is located at (−1, 1, 4) m in frame C. The initial poits are random from (0, 0, 0) m to (−0.9, 0.9, 2.9) m. In simulations and experiments, there are 3 inertial units attached to the space debris, the angle between and M is known, and the distances from IMUs to mass center are 1.5 m, 1.6 m, and 1.6 m, respectively. The luminous markers are attached to IMUs’ surface.
Refer to Pesce’s related work [
13], we set zero-mean Gaussian to measurement of vision and IMUs. Considering the extreme lighting environment, the visual noise is set as Gaussian distribution with a standard deviation of 2.2 pixels, its value is larger than 1 pixel in reference [
13]. Refer to the binocular camera and IMUs used in experiments, the sampling frequency of vision and IMUs are set to 20 Hz and 200 Hz, respectively. Considering the actual measured value and the influence of the space environment, the standard deviation of IMUs’ noise is tripled to factory calibration value. The variance of the angular velocity’s noise is 0.0087 rad/s, the angular acceleration’s noise is
, and the error variance of linear acceleration’s noise is
. The initial angular velocity is set to [1, 10, 2] r/min. Iteration is set at per 5 sample points, and the maximum number of iterations is set to 10. The simulation parameters are shown in
Table 1 and
Table 2.
In order to prove the validity and reliability of the L-M algorithm for the estimation in this paper, we used Monte Carlo analysis to compare the results of the L-M algorithm and the EKF (extended Kalman filter) algorithm on
. One hundred simulations were set, and the results are shown in
Table 3.
Shown as
Table 3, the L-M algorithm achieved all convergence, while the EKF only converged 87 times. This is due to the fact that the initial value of the 13 non-convergent iterations is far from the true value, and the error of the observation equation is large, which led to the non-convergence of the EKF. While the LM algorithm is less affected by the initial conditions, so full convergence was achieved. In the simulation of convergence, the accuracy of both algorithms could achieve about 0.025. However, the LM algorithm converged faster than EKF due to the good local convergence. Therefore, for the unconstrained optimization in this article, the L-M algorithm with better stability and faster convergence was selected.The simulation results are shown in the figures and tables below.
For the measurement of the moment of inertia, the conversion between the normalized 5-parameter inertia tensor and the normalized 2-parameter principal moment of inertia matrix is obtained by Equation (
6). Furthermore, the error of principal moment of inertia is positively related to
. To make the figures clearer, this section use the normalized 2-parameter principal moment of inertia to measure the model’s solution effect on the inertia tensor and direction cosine matrix. Two non-uniform normalized principal moments of inertia
and
are considered. As shown in
Figure 4, when the calculating to 2.09 s, the
and
converged to below 0.03 (dimensionless), which proves that the model has good computational efficiency and a good calculation accuracy. The accuracy meets the subsequent calculation requirements, which will significantly reduce the error of inertial data after denoising. Moreover, because the amount of data required is small, the calculation time is short, which can reduce the impact of random interference.
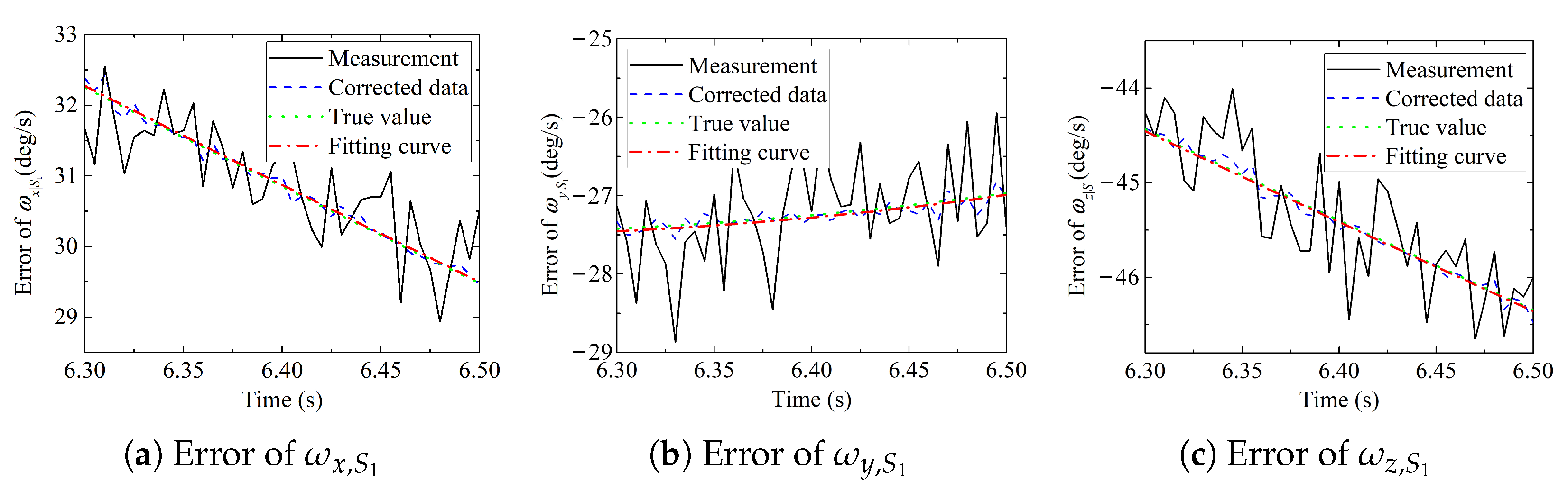
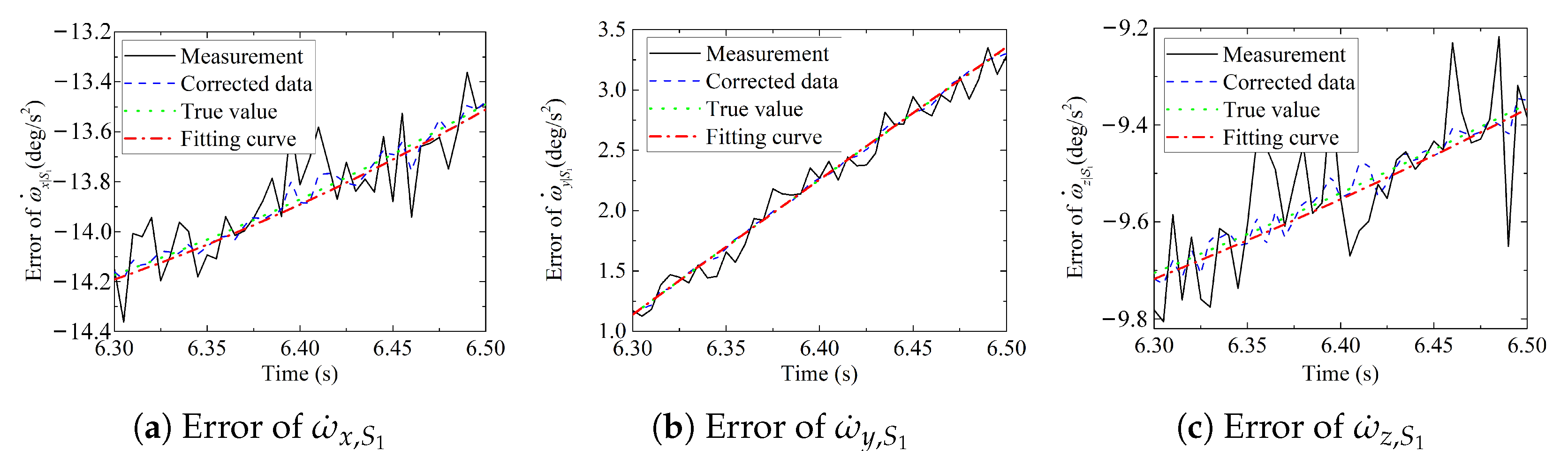
The real-time denoising results are shown in
Figure 5,
Figure 6 and
Figure 7, and
Table 4. The triaxial average relative errors of
were all less than 0.9008%, the triaxial average relative errors of
were less than 0.9641%, and the triaxial average relative errors of
were less than 0.9209%, it can be seen that the error was reduced to less than 1% after the denoising of the inertial data, which achieves a better real-time denoising effect and provides good data support for the subsequent calculation.
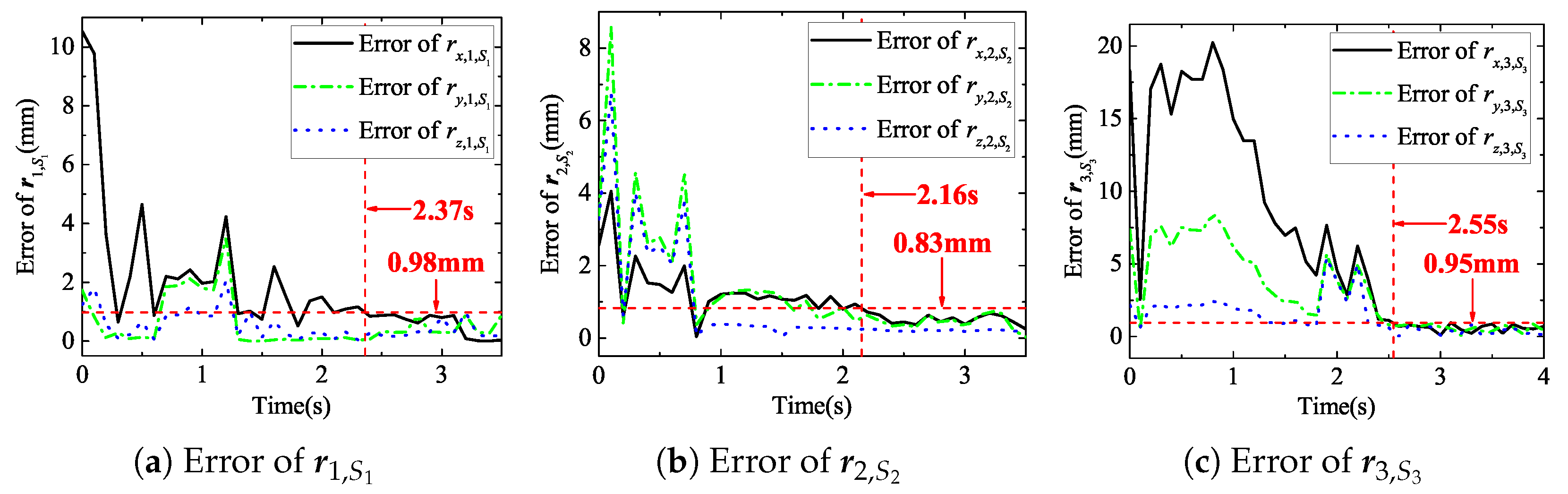
Figure 8 shows the simulation error of the vectors from the mass center
to the origin of
. It can be seen that the vectors’ triaxial average error converged below 0.98 mm after 2.55 s. As the process of our algorithm for identifying the mass center is different from existing methods, the comparison for this vector is not given in the paper. However, from the subsequent results of the mass center solution, the accuracy and real-time performance are also in line with the requirements of the de-tumbling and capture operations.
Figure 9 shows the mass-center identification error. When the calculation time reached 6.83 s, the triaxial errors of the mass center converged to less than 0.47 mm. This is an accurate estimation, which can provide a good data benchmark for normalized angular momentum orientation and de-tumbling force positioning.
The Average relative error of
is shown in
Table 5. The
(
= 1, 2, 3) are the elements in
, and the maximum error was 0.711%, which can provide the good basis for calculating normalized angular momentum.
As shown in
Figure 10 and
Table 6, the normalized angular momentums were estimated, and the relative error of solved
was less than 0.25%, and the convergence time was less than 7.53 s, which can guide the de-tumbling operation and Improve the efficiency and success rate of de-tumbling.
5. Experiments of Dynamic Parameters’ Identification
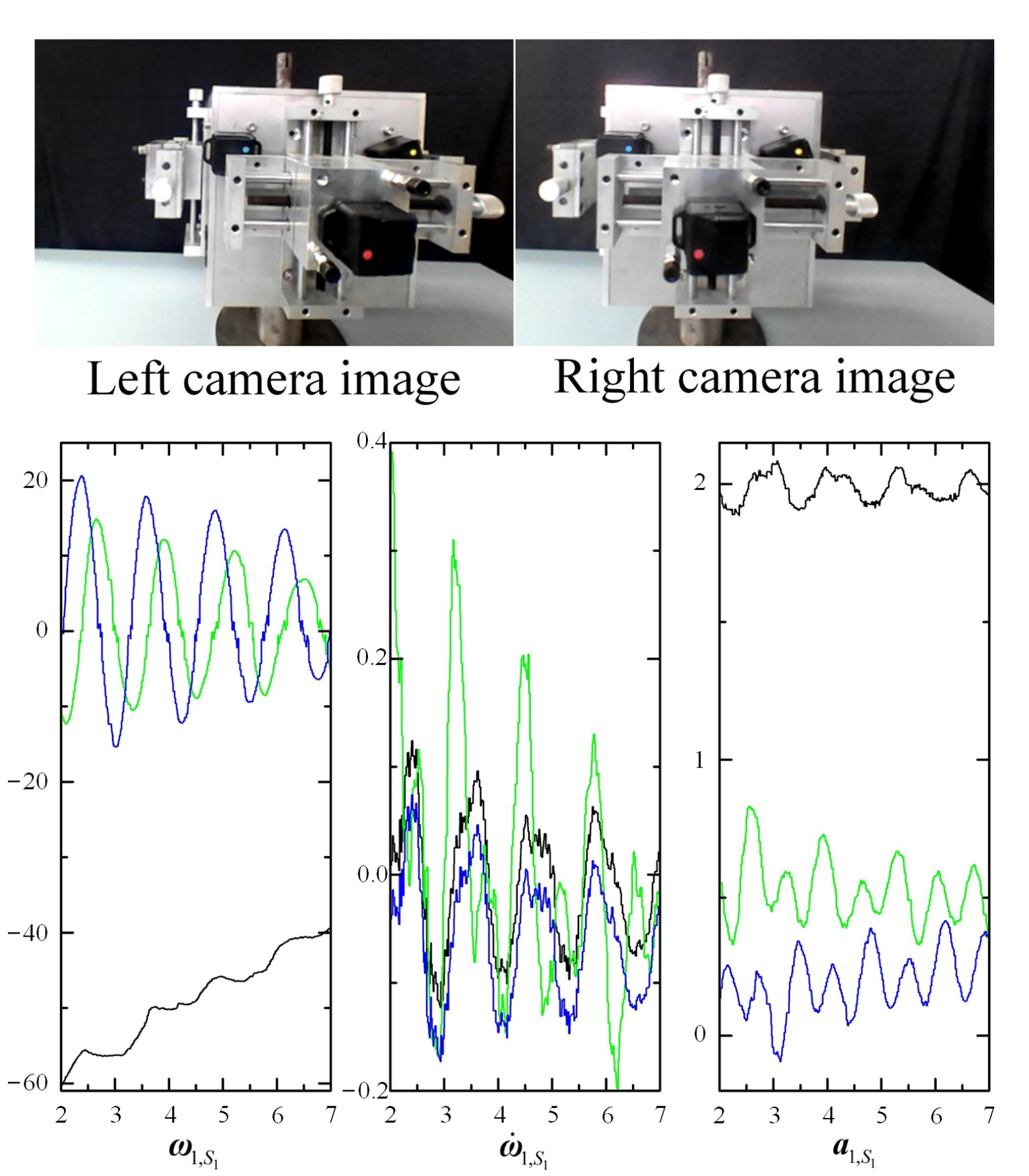
To verify the effectiveness and reliability of our method, experiments in the controlled laboratory scenario are carried out in this section. The designed experiment system is shown in
Figure 11, in which the three IMUs are WT-901, with a sampling frequency of 200 Hz and communicate with the host computer through CSMA/CA protocol, and the distance between IMUs and mass center is 0.3 m, 0.32 m, and 0.32 m, respectively. The surface of every IMU is pasted with different color markers to simulate the luminous marker points in the space environment; the binocular vision is MYNTAI-S2110 with a sampling frequency of 20 Hz and a resolution of 720 × 480. The ‘debris’ is a proportionally reduced size model relative to the simulation, with a size of 0.4 m × 0.4 m× 0.4 m, and the center of mass is located at (−0.2 m, 0.2 m, 0.8 m) in frame
C. The universal ball is selected as the rotating part to realize the triaxial rotation of the ‘debris’. According to the spacecraft mass adjustment mechanism described in [
30], a combined device of slide and metal block is designed as a mechanism for adjusting the mass center. The mass blocks are aluminum alloy block and stainless-steel block which are symmetrically fixed to equipment, and realize different principal moments of inertia in this way, the normalized principal moments of inertia are also 2.6, 2 and 1. The initial angular velocity of experiments is set to correspond to the simulation, and both are [1, 10, 2] r/min. The experimental parameters are shown in
Table 7,
Table 8 and
Table 9.
The experimental data are shown in
Figure 12. The periodicity decreasing of angular velocity is caused by gravity torque causing the error of mass adjustment, friction of the universal ball and air resistance. To eliminate the influence of the external moment, the influence of the gravitational moment is fitted by the change of the angle
between the IMU’s axis and the direction of gravity measured by the IMU. The friction and air resistance are, respectively, the constant unknown moment
and
. The distance between the mass center and the rotation center is set to constant unknown quantity
l, and the initial angle between the center of mass and the gravity axis is set to
. The mass
m of ‘debris’ is known, and the torque-free Euler equation is changed to the following form:
The
and
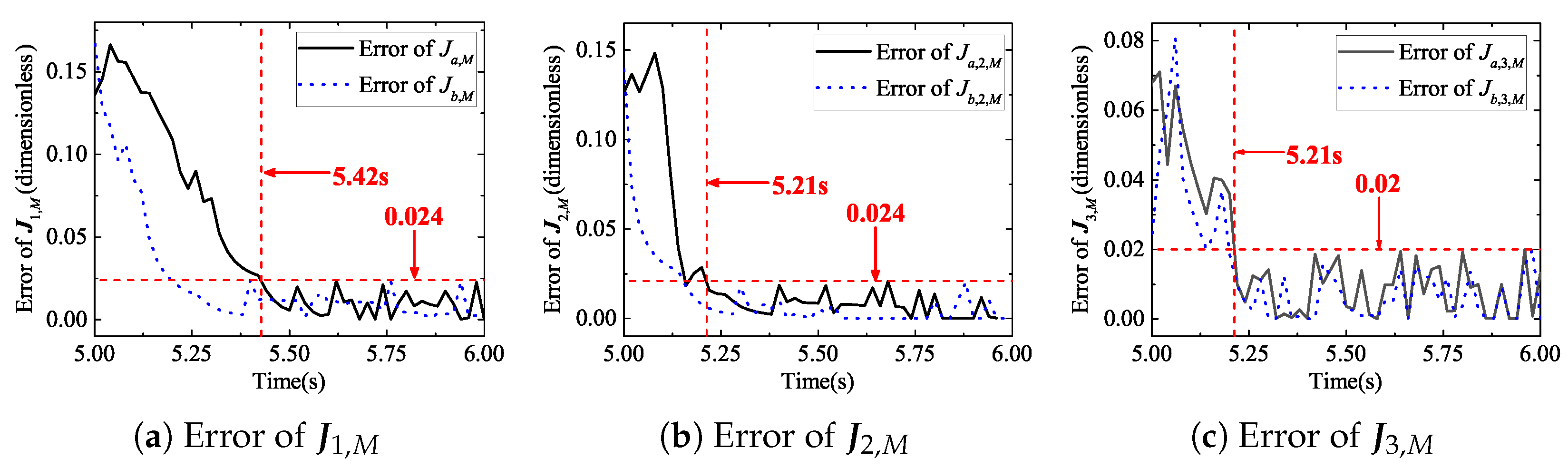
’s experimental results are shown as
Figure 13. When the calculation reaches 5.42 s,
converges to 0.027 (dimensionless). Compared with the simulation, the convergence time of the algorithm is longer, which is mainly affected by the added solution quantity in Equation (
40) and leads to the need for more data points for estimation.
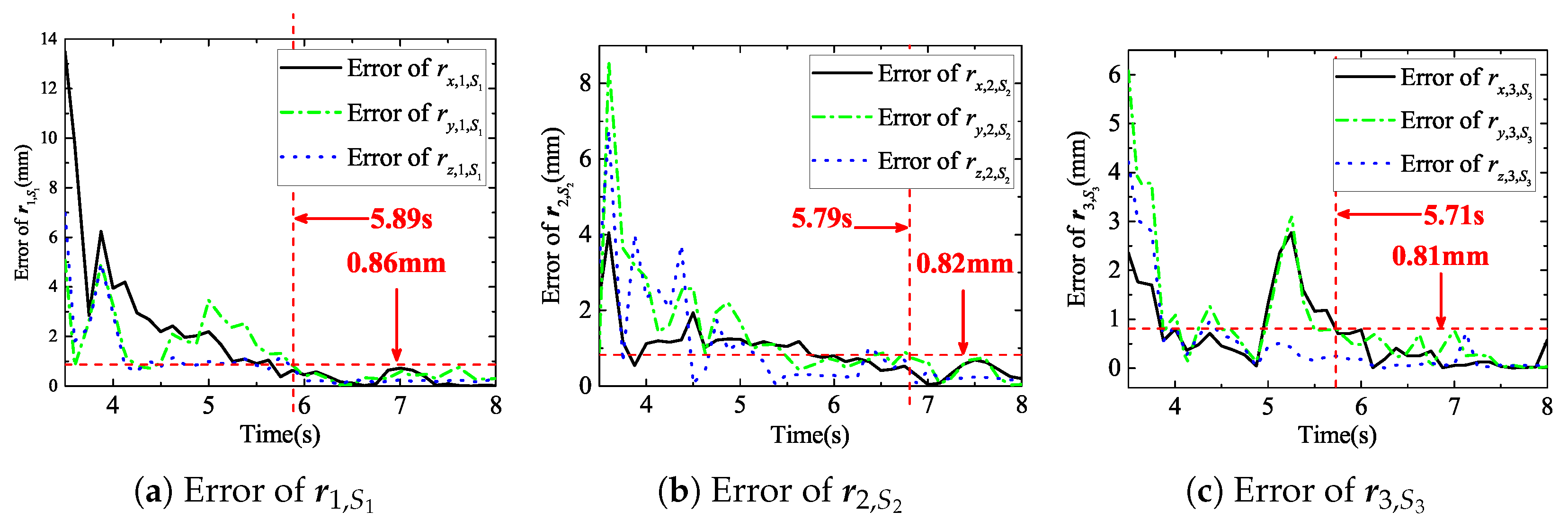
As shown in
Figure 14, when the calculation reaches 5.89 s, the triaxial error of the
decreased to 0.86 mm as reported in
Figure 14. Using this error to measure the denoising result, it is known that the average relative error of the measured data of the inertial unit after denoising is less than 1.1%, which proves that this method can achieve a better denoising effect under actual working conditions.
Since the motions of experimental equipment and the Euler–Poinsot motion are the same, they are both fixed-point motion, the identify mass center is replaced by identifying the rotation center. As shown in
Figure 15, at 9.21 s, the three-axis error of the mass center location converged below 0.49 mm. Compared with the simulation, the convergence time of the algorithm in the experiment is longer, which is mainly affected by the low resolution of binocular vision.
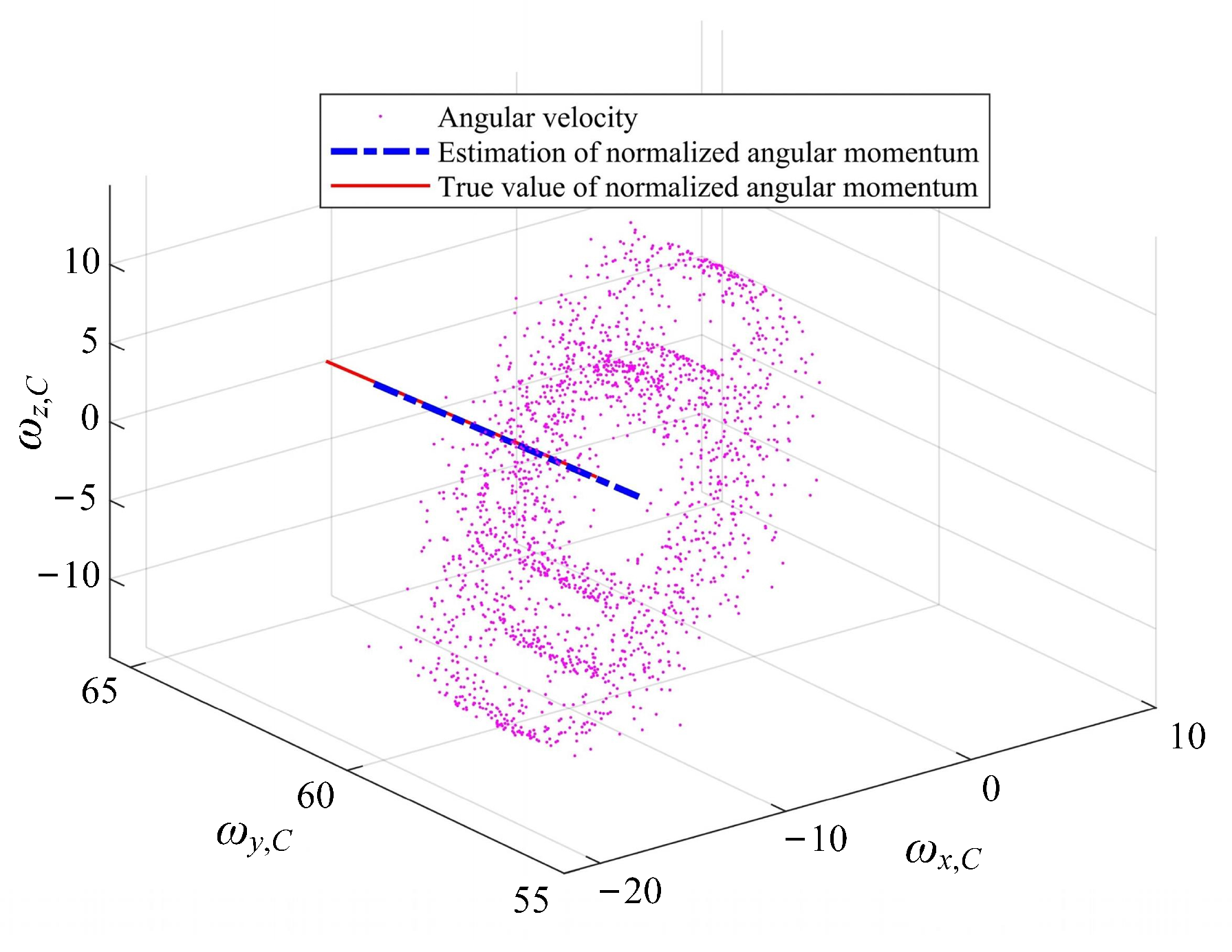
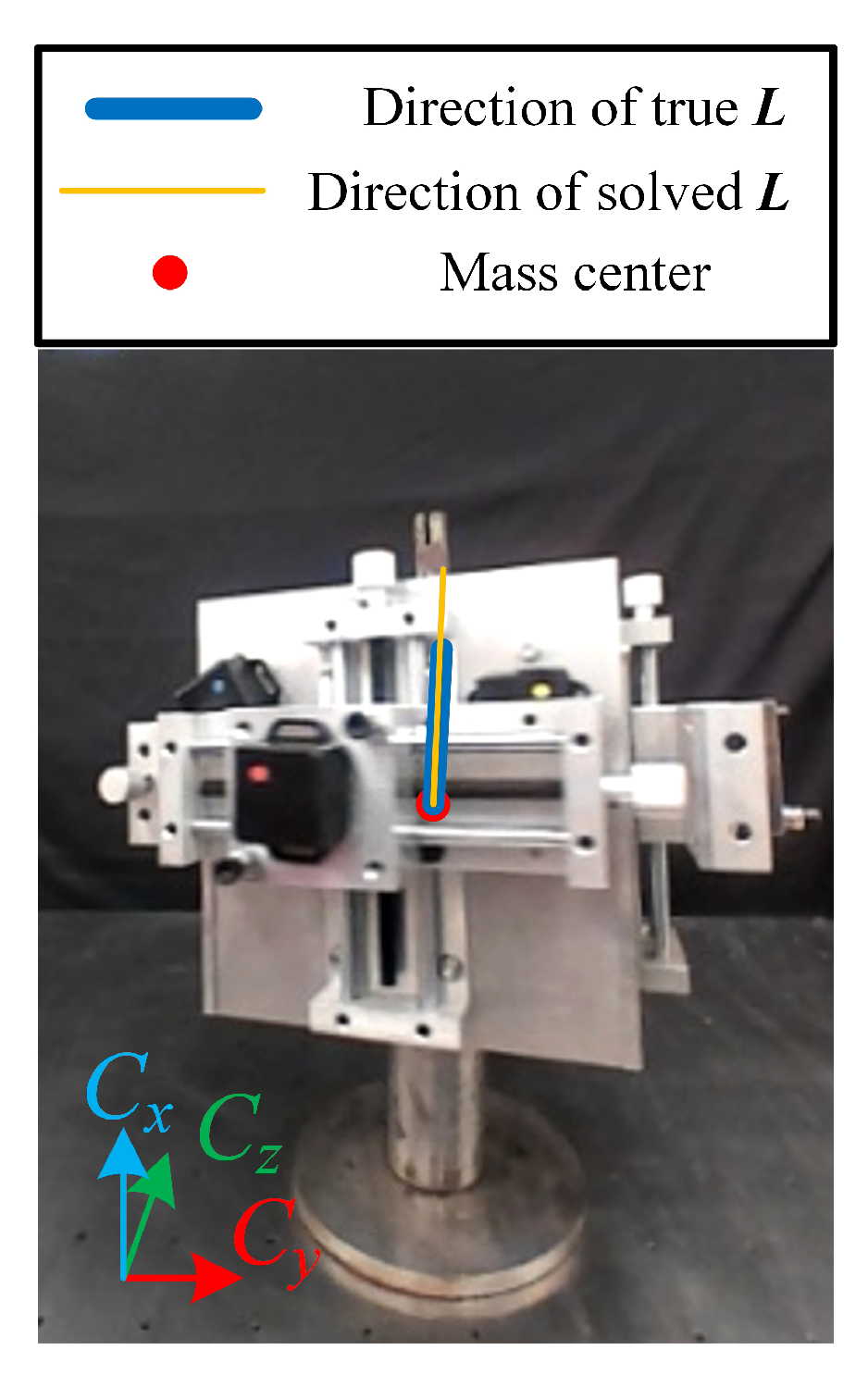
The experiments’ results of normalized angular moment are shown in
Figure 16 and
Table 10, Error of
is less than 0.0081 rad, and the convergence time is less than 10.31 s. Limited by the experimental conditions, the experimental error is slightly larger than the simulation error. However, our method can still provide better guidance for de-tumbling mission.
Table 11 shows the comparison of the simulation and experimental results of our method with the Pesce’s simulation results and the Tweddle’s experimental results (they are all binocular vision method). Because binocular vision is affected by complex spatial lighting conditions, so the convergence time of visial method is more than this method; Tweddle’s method identifies the object as a geometric symmetrical object, so it identifies the geometric center of the fragment feature point as the debris’ mass center, but it has a certain offset when it is used in normal debris, so our recognition error of this method is less than Tweddle’s algorithm. At the same time, this method increases the estimation of the angular momentum’s direction in the de-tumbling frame. The above comparison proves that our method is more in line with the actual needs of de-tumbling and capture mission.
6. Conclusions
In this paper, aiming at identifying dynamic parameters of large space debris such as final stage rockets and failed satellites, a method based on visual and inertial data fusion is proposed, and a binocular camera and IMUs are used to acquire data. The real-time performance of IMU and the positioning advantage of stereo vision is used to improve the identification accuracy of dynamic parameters. Using unconstrained optimization and space debris’ dynamic characteristics, this method reduces the noise of the IMU’s data, and on this basis, the normalized principal moment of inertia, the mass-center location in the ADR coordinate system and the normalized angular momentum of the space debris are better estimated, and a set of active-debris-removal parameters is established. Simulations are carried out with Gaussian white noise. The simulations showed that the normalized principal moment of inertia’s error converges below 0.03 (dimensionless) after 2.09 s. A laboratory experimental system was built. The experiment showed that the normalized principal moment of inertia’s error converged below 0.024 (dimensionless) when the calculation reached 5.42 s. In the simulation, the errors of angular velocity, angular acceleration and linear acceleration were all less than 1%, and the triaxial error of the distance from mass center to IMUs converged below 0.98 mm when the calculation reached 2.55 s. In the experiments, the triaxial errors of the distance from the center of mass to IMU were less than 0.86 mm after 5.89 s, and using this error, we can know the good effect of IMU data’s denoising. For the mass-center location estimations, when the simulation time was more than 6.83 s, the triaxial error of mass-center location converged below 0.47 m, and when the experimental time was more than 9.21 s, the triaxial error of centroid position converged below 0.49 m. In simulations, the transformation matrix from IMUs’ frame to ADR frame was calculated, and the maximum error of the elements in the matrix was 0.711%. The normalized angular moment’s relative error was less than 0.0025 rad after 7.53 s. In the experiments, the normalized angular moment’s relative error was less than 0.0081 rad after 10.31 s, which proves the great calculation effect of the transformation matrix from the IMUs’ frame to ADR frame. The simulations and experiments’ results prove the robustness, high precision and real-time of our method. This method is suitable for space debris de-tumbling and capture missions in LEO, and is also useful for real-time, high accuracy in-orbit missions.
An IMU is used in our method, which is essential to reduce spatial light interference and improve computational efficiency. In addition, the short calculation time proves that the amount of data required by this method is small, which is beneficial to reduce the calculation cost of the on-board computer. To calculate the optimization equation, the L-M algorithm is used. In fact, the L-M algorithm can be further improved to better adapt to this method and increase computational efficiency. In the future, we can use the inertia parameters obtained for 3D reconstruction of space debris, and find the optimal impact location. Moreover, in the next step, using the dynamic parameters estimated in this paper and the impact location, the ADR mission can be carried out.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}