
Dynamic Modeling and Control of Antagonistic Variable Stiffness Joint Actuator

 ,
, 

Abstract
1. Introduction
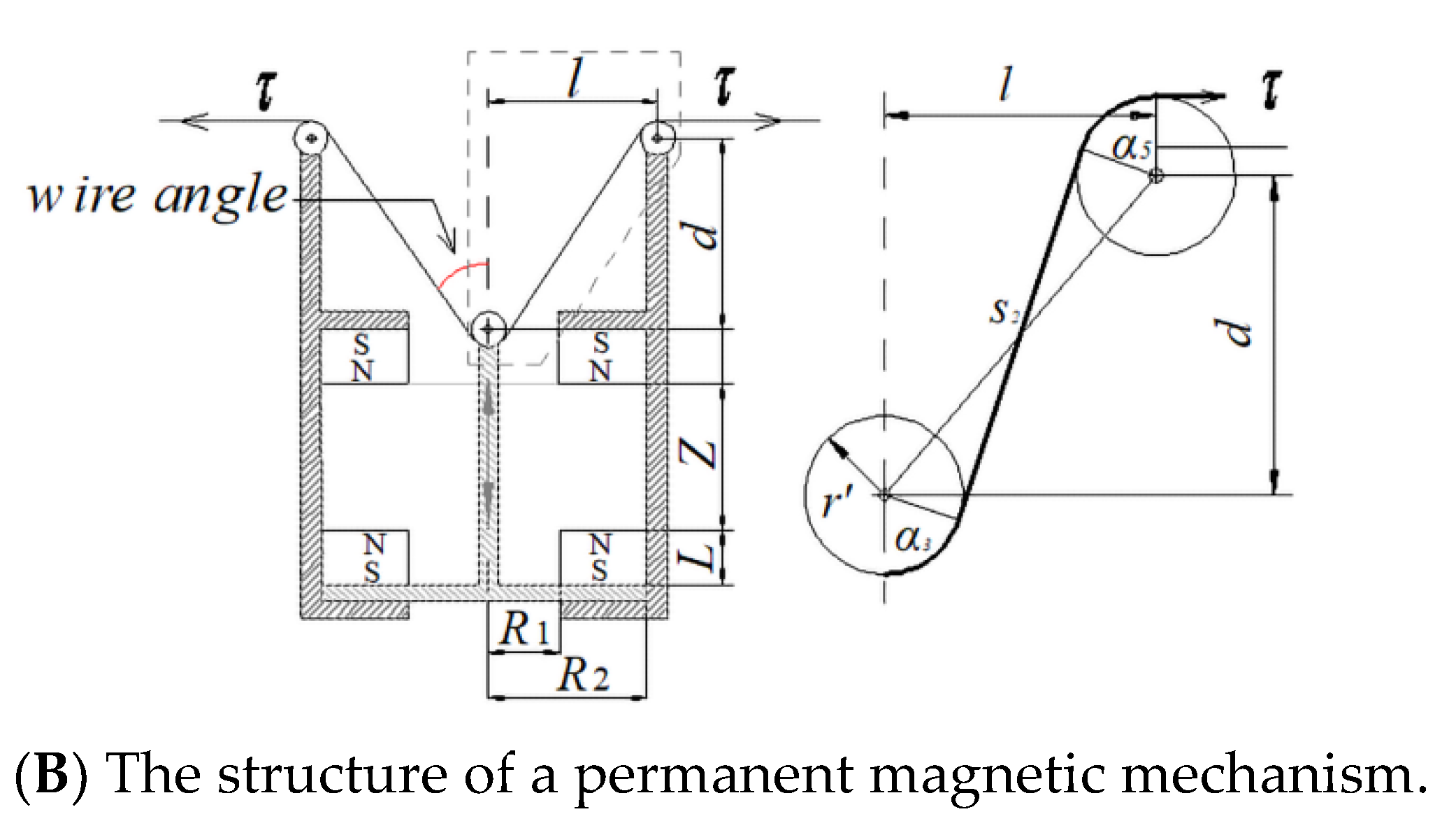
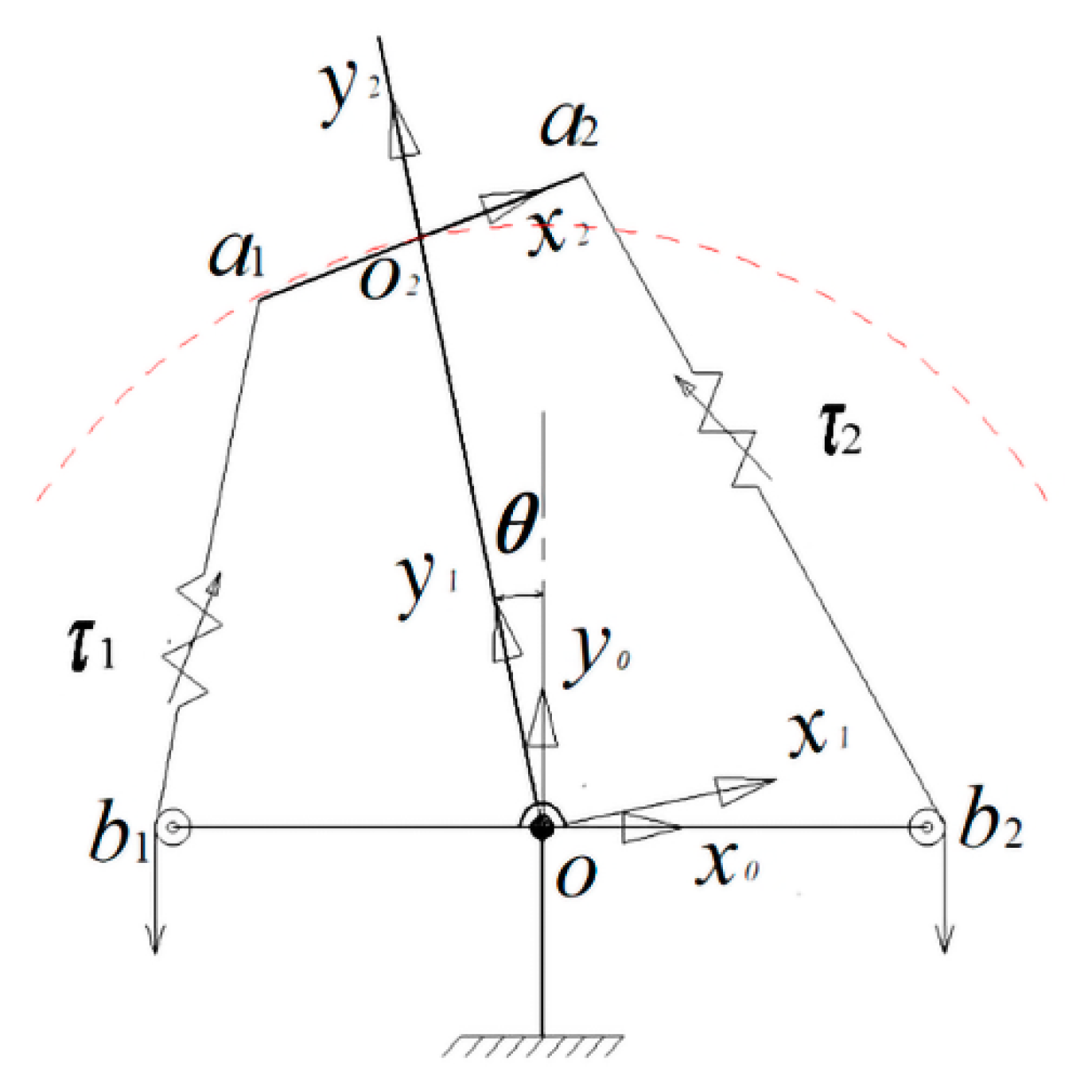
2. Working Principle and Stiffness Model
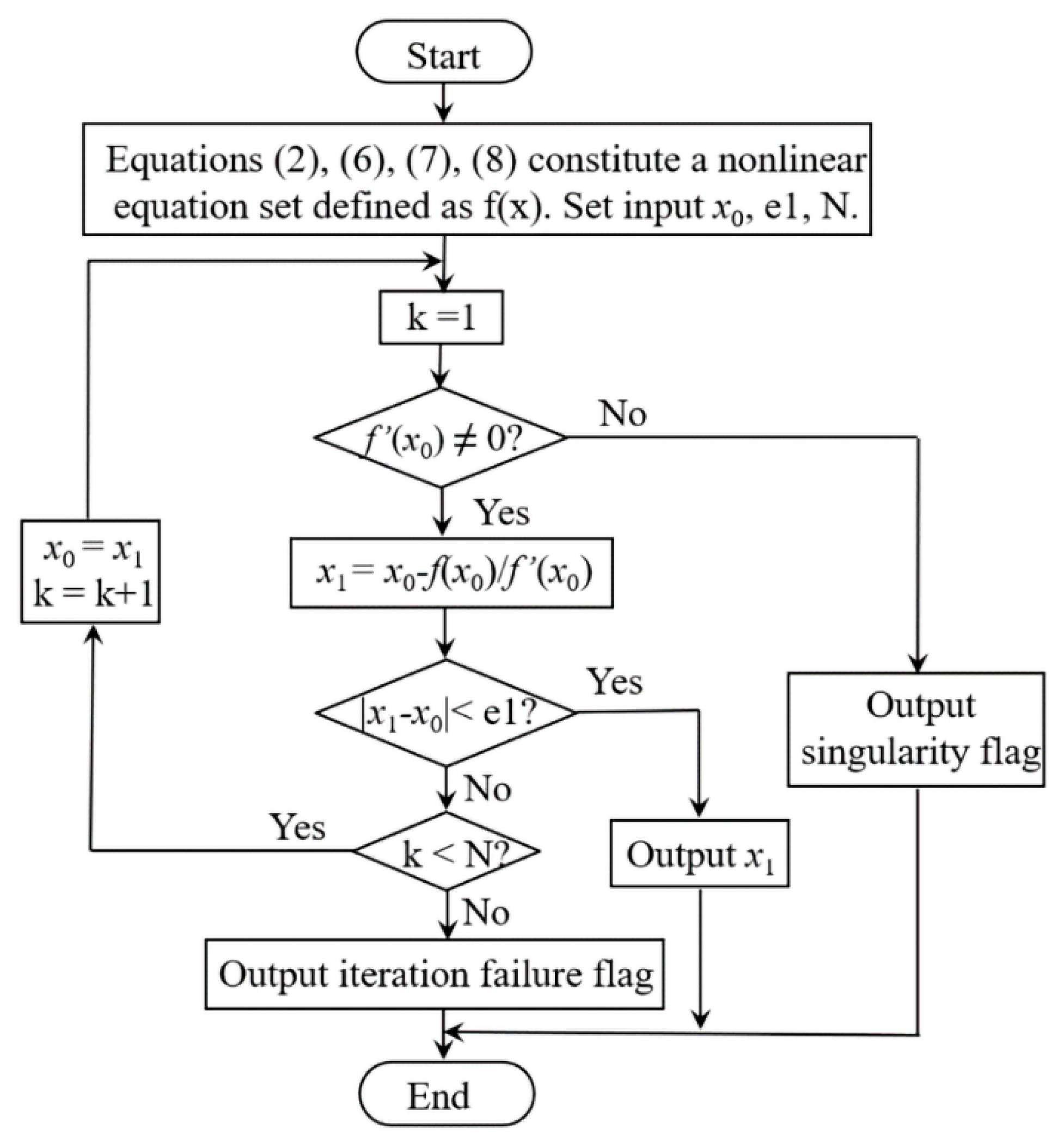
3. Joint Actuator Dynamic Model and Controller Design
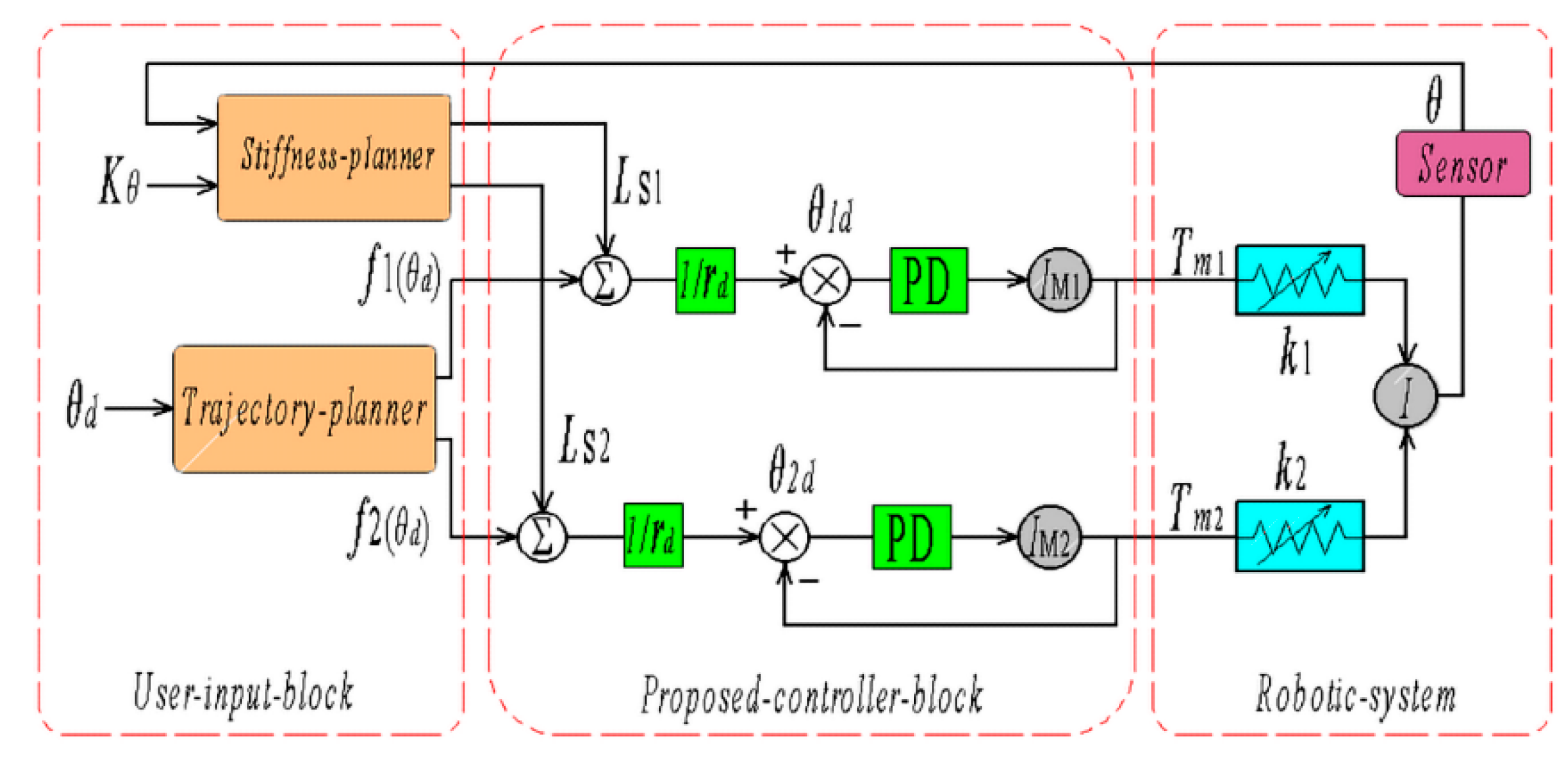
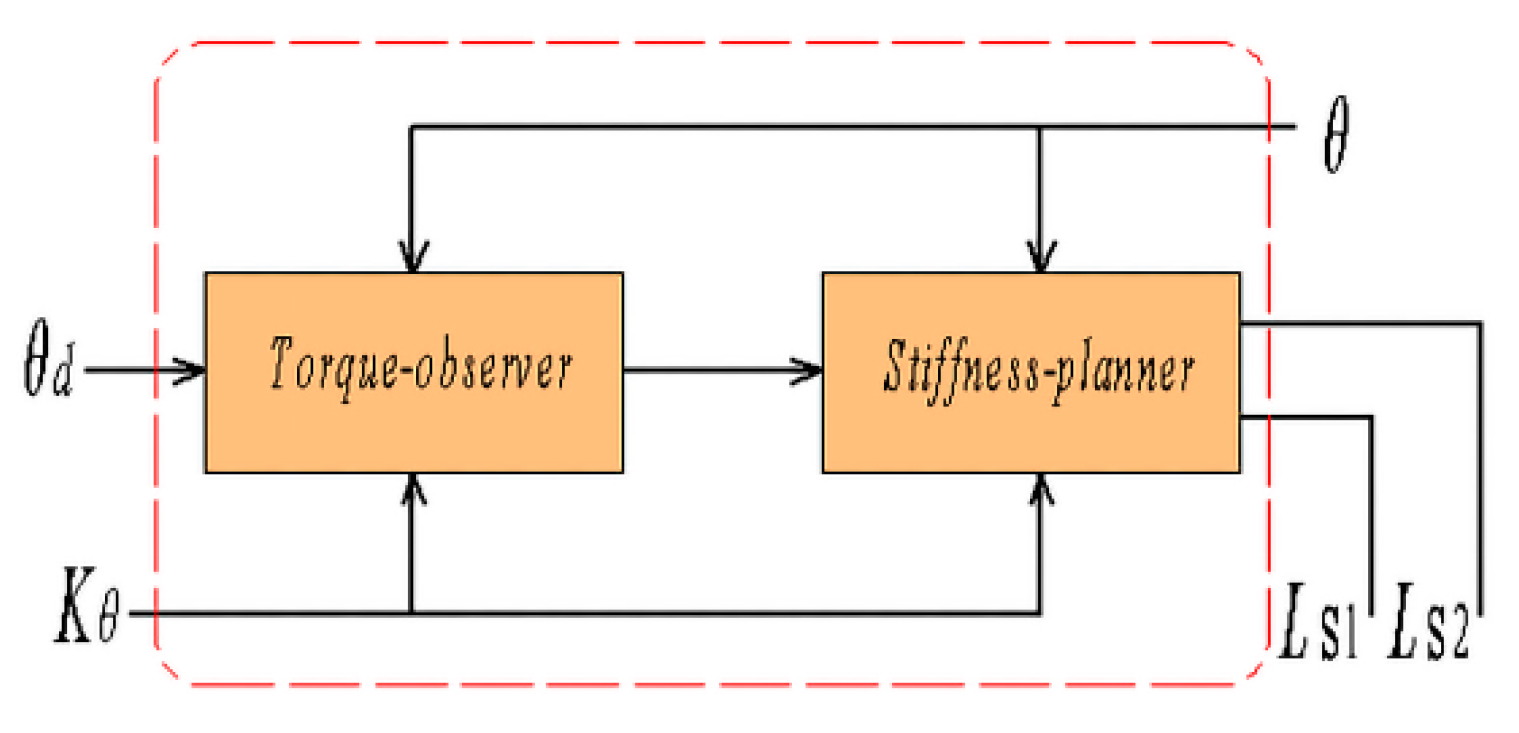
3.1. Controller Design
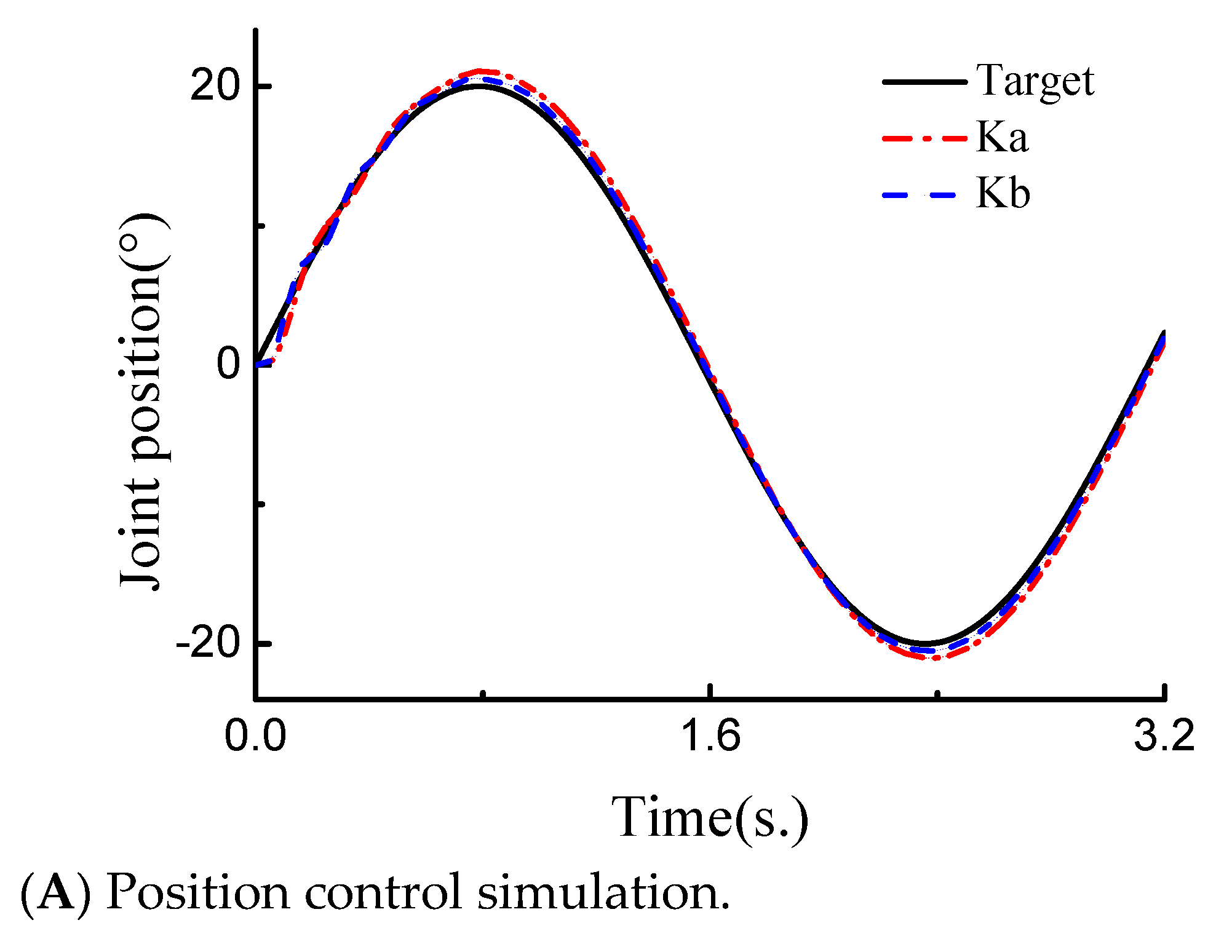
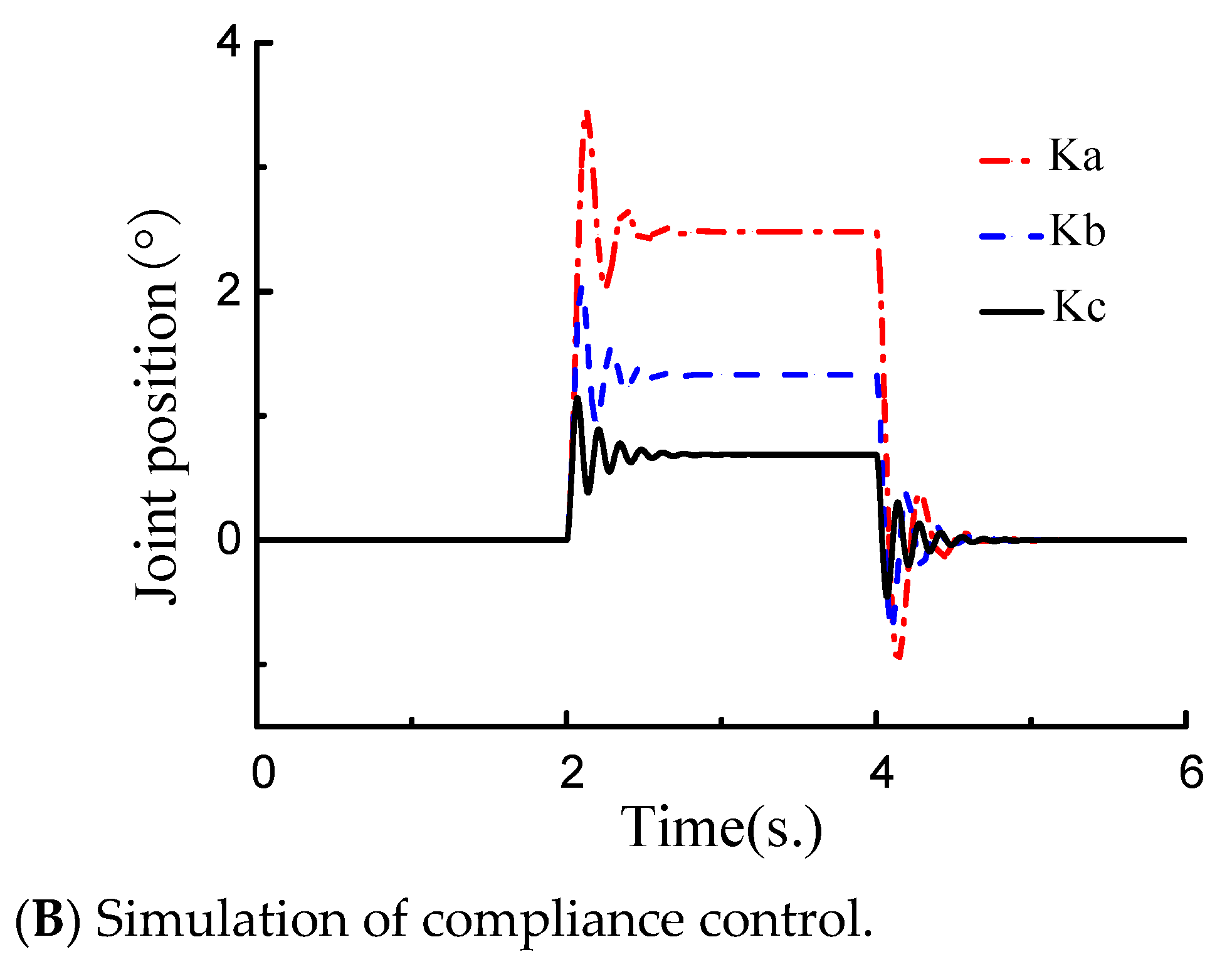
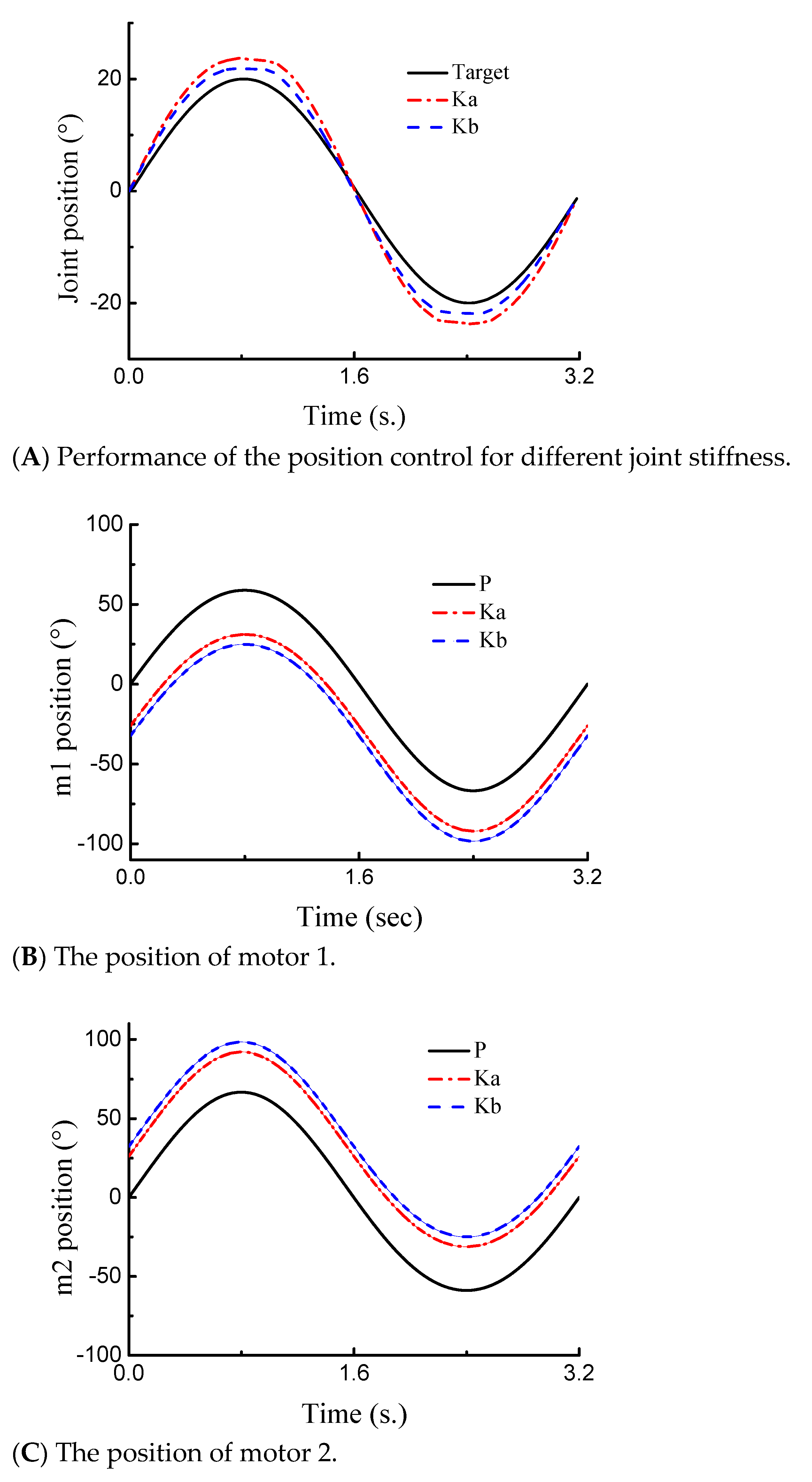
3.2. System Simulation Analysis
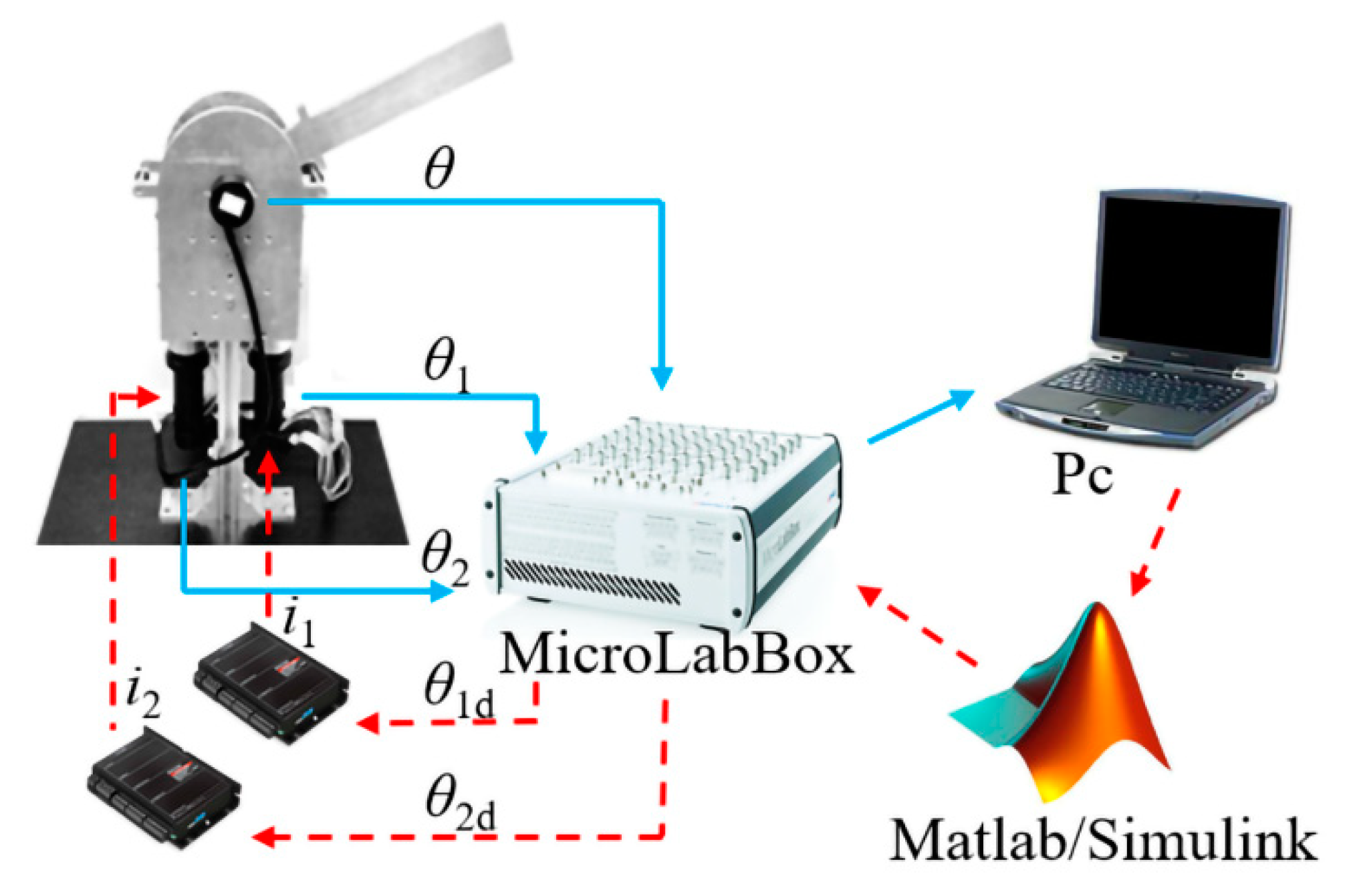
4. Experimental Analysis
4.1. Analysis of Position Control
4.2. Analysis of Compliance Control
4.3. Analysis of Force Compensation
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Vu, H.-Q.; Yu, X.; Lida, F.; Pfeifer, R. Improving energy efficiency of hopping locomotion by using a variable stiffness actuator. IEEE/ASME Trans. Mechatron. 2016, 21, 472–486. [Google Scholar] [CrossRef]
- Kim, B.-S.; Song, J.-B. Design and control of a variable stiffness actuator based on adjustable moment arm. IEEE Trans. Robot. 2012, 28, 1145–1151. [Google Scholar]
- Tao, Y.; Wang, T.-M.; Wang, Y.-Q.; Guo, L.; Xiong, H.-G.; Xu, D. A new variable stiffness robotic joint. Ind. Robot. Int. J. 2015, 42, 371–378. [Google Scholar] [CrossRef]
- Tsagarakis, N.-G.; Sardellitti, I.; Caldwell, D.-G. A new variable stiffness actuator (CompAct-VSA): Design and modelling. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), San Francisco, CA, USA, 25–30 September 2011. [Google Scholar]
- Park, J.; Song, J.-B. Safe joint mechanism using inclined link with springs for collision safety and position accuracy of a robot arm. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Anchorage, AK, USA, 3–7 May 2010; pp. 813–818. [Google Scholar]
- Fang, L.; Wang, Y. Study on the stiffness property of a variable stiffness joint using a leaf spring. Proc. Inst. Mech. Eng. Part C: J. Mech. Eng. Sci. 2018, 233, 1021–1031. [Google Scholar] [CrossRef]
- Shah, D.; Wu, Y.-Q.; Scalzo, A.; Metta, G.; Parmiggiani, A. A comparison of robot wrist implementations for the icub humanoid. Robotics 2019, 8, 11. [Google Scholar] [CrossRef]
- Zhang, M.; Fang, L.-J.; Sun, F.; Sun, X.-W.; Gao, Y.; Oka, K. Realization of flexible motion of robot joint with a novel permanent magnetic spring. In Proceedings of the IEEE International Conference on Intelligence and Safety for Robotics, Shenyang, China, 24–27 August 2018; pp. 331–336. [Google Scholar]
- Amir, J. Coupling between the output force and stiffness in different variable stiffness actuators. Actuators 2014, 3, 270–284. [Google Scholar]
- Wang, W.; Zhao, Y.-W.; Li, Y.-M. Design and dynamic modeling of variable stiffness joint actuator based on archimedes spiral. IEEE Access 2018, 4, 43798–43807. [Google Scholar] [CrossRef]
- Nakanishi, Y.; Ito, N.; Shirai, T.; Osada, M.; Izawa, T.; Ohta, S.; Urata, J.; Okada, K.; Inaba, M. Design and powerful and flexible musculoskeletal arm by using nonlinear spring unit and electromagnetic clutch opening mechanism. In Proceedings of the IEEE-RAS International Conference on Humanoid Robots, Bled, Slovenia, 26–28 October 2011; pp. 377–382. [Google Scholar]
- Bi, S.-S.; Liu, C.; Zhao, H.-Z.; Wang, Y.-L. Design and analysis of a novel variable stiffness actuator based on parallel-assembled-folded serial leaf springs. Adv. Robot. 2017, 31, 990–1001. [Google Scholar] [CrossRef]
- Wang, W.; Fu, X.-Y.; Li, Y.-M.; Yun, C. Design of variable stiffness actuator based on modified gear-rack mechanism. Mech. J. Mech. Robot. 2016, 8, 061008. [Google Scholar] [CrossRef]
- Osada, M.; Ito, N.; Nakanishi, Y.; Inaba, M. Realization of flexible motion by musculoskeletal humanoid “Kojiro” with add-on nonlinear spring units. In Proceedings of the IEEE-RAS International Conference on Humanoid Robots, Nashville, TN, USA, 6–8 December 2010; pp. 174–179. [Google Scholar]
- Alazmani, A.; Keeling, D.-G.; Walker, P.-G.; Abbas, S.-K.; Jaber, O.; Sivananthan, M.; Watterson, K.; Levesley, M.-C. Design and evaluation of a buckled strip compliant actuator. IEEE/ASME Trans. Mechatron. 2013, 18, 1819–1826. [Google Scholar] [CrossRef]
- Palli, G.; Melchiorri, C.-J.; Luca, A.-D. On the feedback linearization of robots with variable stiffness. In Proceedings of the IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008; pp. 1753–1759. [Google Scholar]
- Liu, L.; Leonhardt, S.; Misgeld, B.-J. Design and control of a mechanical rotary variable impedance actuator. Mechatronics 2016, 39, 226–236. [Google Scholar] [CrossRef]
- Wang, W.; Fu, X.-Y.; Li, Y.-M.; Yun, C. Design and implementation of a variable stiffness actuator based on flexible gear rack mechanism. Robotica 2018, 36, 448–462. [Google Scholar] [CrossRef]
- Zhou, X.-B.; Jun, S.-K.; Krovi, V. A cable based active variable stiffness module with decoupled tension. J. Mech. Robot. 2015, 7, 011005. [Google Scholar] [CrossRef]
- Groothuis, S.; Carloni, R.; Stramigioli, S. A novel variable stiffness mechanism capable of an infinite stiffness range and unlimited decoupled output motion. Actuators 2014, 3, 107–123. [Google Scholar] [CrossRef]
- Torrealba, R.-R.; Udelman, S.-B. Design of cam shape for maximum stiffness variability on a novel compliant actuator using differential evolution. Mech. Mach. Theory 2016, 95, 114–124. [Google Scholar] [CrossRef]
- Zhakatayev, A.; Rubagotti, M.; Varol, H.-A. Closed-loop control of variable stiffness actuated robots via nonlinear model predictive control. IEEE Access 2015, 3, 235–248. [Google Scholar] [CrossRef]
- Yu, J.; Zhao, Y.; Wang, H.; Chen, G.; Lai, X. The best-approximate realization of a spatial stiffness matrix with simple springs connected in parallel. Mech. Mach. Theory 2016, 103, 236–249. [Google Scholar] [CrossRef]
- Chen, P.; Li, H.-Y. A decoupled control method based on MIMO system for flexible manipulators with FS-SEA. In Proceedings of the IEEE Conference on Robotics and Biomimetics, Zhuhai, China, 6–27 December 2015; pp. 662–667. [Google Scholar]
- Florian, P.; Andreas, D.; Alin, A.-S. Backstepping control of variable stiffness robots. IEEE Trans. Control Syst. Technol. 2015, 23, 2195–2201. [Google Scholar]
- Zhao, Y.; Yu, J.; Wang, H.; Chen, G.; Lai, X. Design of an electromagnetic prismatic joint with variable stiffness. Ind. Robot. Int. J. 2017, 44, 173–181. [Google Scholar] [CrossRef]
- Jafari, A.; Tsagarakis, N.-G.; Caldwell, D.-G. A novel intrinsically energy efficient actuator with adjustable stiffness. IEEE/ASME Trans. Mechatron. 2013, 18, 355–365. [Google Scholar] [CrossRef]
- Braun, D.-J.; Petit, F.; Huber, F.; Haddadin, S. Robots driven by compliant actuators: Optimal control under actuation constraints. IEEE Trans. Robot. 2013, 29, 1085–1101. [Google Scholar] [CrossRef]
- Xie, H.-L.; Zhao, X.-F.; Sun, Q.-C.; Yang, K.; Li, F. A new virtual-real gravity compensated inverted pendulum model and adams simulation for biped robot with heterogeneous legs. J. Mech. Sci. Technol. 2020, 34, 401–412. [Google Scholar] [CrossRef]
- Kim, Y.-J.; Kim, J.-I.; Jang, W. Quaternion joint: Dexterous 3-DOF joint representing quaternion motion for high-speed safe interaction. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 935–942. [Google Scholar]
- Refour, E.-M.; Sebastin, B.; Chauhan, R.-J.; Tzvi, P.-B. A general purpose robotic hand exoskeleton with series elastic actuation. J. Mech. Robot. 2019, 11, 060902. [Google Scholar] [CrossRef] [PubMed]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mechanical Specification | Value | Unit |
|---|---|---|
| Stiffness range | 0~∞ | [N·m/rad] |
| Time for stiffness change | 0.4 | [s] |
| Range of joint rotation | 140 | [°] |
| Dimensions o2a1 = o2a2 | 0.024 | [m] |
| oo2 | 0.072 | [m] |
| ob1 = ob2 | 0.08 | [m] |
| Winch radius rd | 0.02 | [m] |
| Winch inertia IM | 0.0002 | [kg·m2] |
| Output link inertia IL | 1.2 | [kg·m2] |
| Output link weight m | 0.3 | [kg] |
| Output link length L | 0.25 | [m] |
| Weight (kg) | Stiffness (Nm/rad) | Compensation | Average Deflection Angle (°) | Each Deflection Angle (°) |
|---|---|---|---|---|
| 0.5 | 30 | No | 3.32 | 3.4 3.2 3.3 3.4 3.3 |
| 0.5 | 30 | Yes | 0.32 | 0.3 0.4 0.3 0.2 0.4 |
| 0.5 | 60 | No | 1.58 | 1.7 1.6 1.6 1.5 1.5 |
| 0.5 | 60 | Yes | 0.28 | 0.4 0.3 0.3 0.2 0.2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, M.; Ma, P.; Sun, F.; Sun, X.; Xu, F.; Jin, J.; Fang, L. Dynamic Modeling and Control of Antagonistic Variable Stiffness Joint Actuator. Actuators 2021, 10, 116. https://doi.org/10.3390/act10060116
Zhang M, Ma P, Sun F, Sun X, Xu F, Jin J, Fang L. Dynamic Modeling and Control of Antagonistic Variable Stiffness Joint Actuator. Actuators. 2021; 10(6):116. https://doi.org/10.3390/act10060116
Chicago/Turabian StyleZhang, Ming, Pengfei Ma, Feng Sun, Xingwei Sun, Fangchao Xu, Junjie Jin, and Lijin Fang. 2021. "Dynamic Modeling and Control of Antagonistic Variable Stiffness Joint Actuator" Actuators 10, no. 6: 116. https://doi.org/10.3390/act10060116
APA StyleZhang, M., Ma, P., Sun, F., Sun, X., Xu, F., Jin, J., & Fang, L. (2021). Dynamic Modeling and Control of Antagonistic Variable Stiffness Joint Actuator. Actuators, 10(6), 116. https://doi.org/10.3390/act10060116