
An Optimization Design of Adaptive Cruise Control System Based on MPC and ADRC


Abstract
1. Introduction
2. Materials and Methods
2.1. Longitudinal Car-Following Model
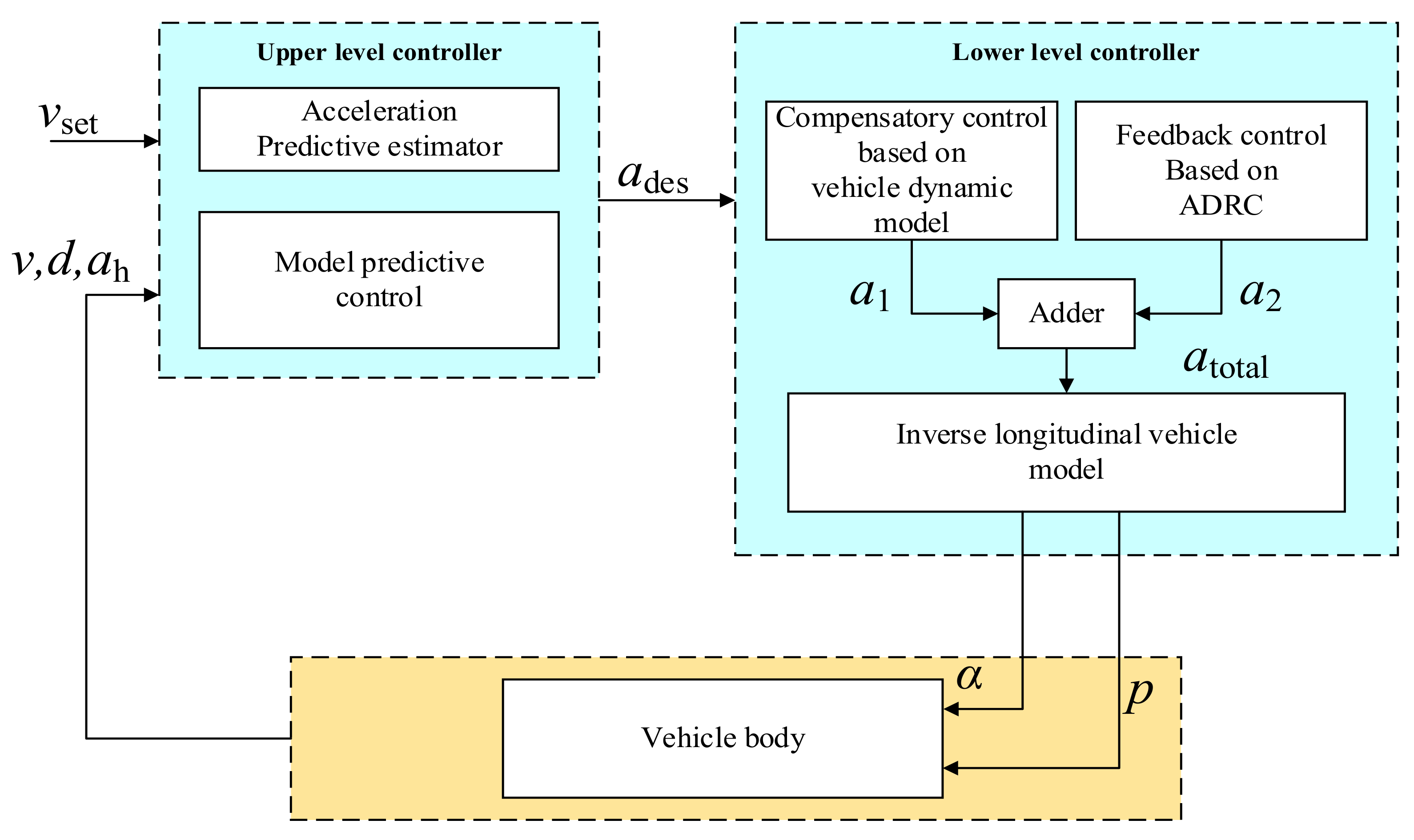
2.2. The Design of the Upper-Level Controller
2.2.1. The Design of the Acceleration Predictive Estimator
2.2.2. Design of the Model Predictive Control Controller
- The safety objective
- The tracking capability objective
- When the front target vehicle is driving in a stable state, the values of distance error and speed error should be controlled to zero, which can be expressed as follows:
- 2.
- When the front target vehicle is in the state of braking or accelerating, the distance between the two vehicles should be restricted to prevent a cut-in, which can be expressed as follows:
- The fuel economy objective
- The ride comfort objective
2.3. The Design of the Lower-Level Controller
2.3.1. Feed-Forward Control Based on the VDM
- Driving dynamic model
- Braking dynamic model
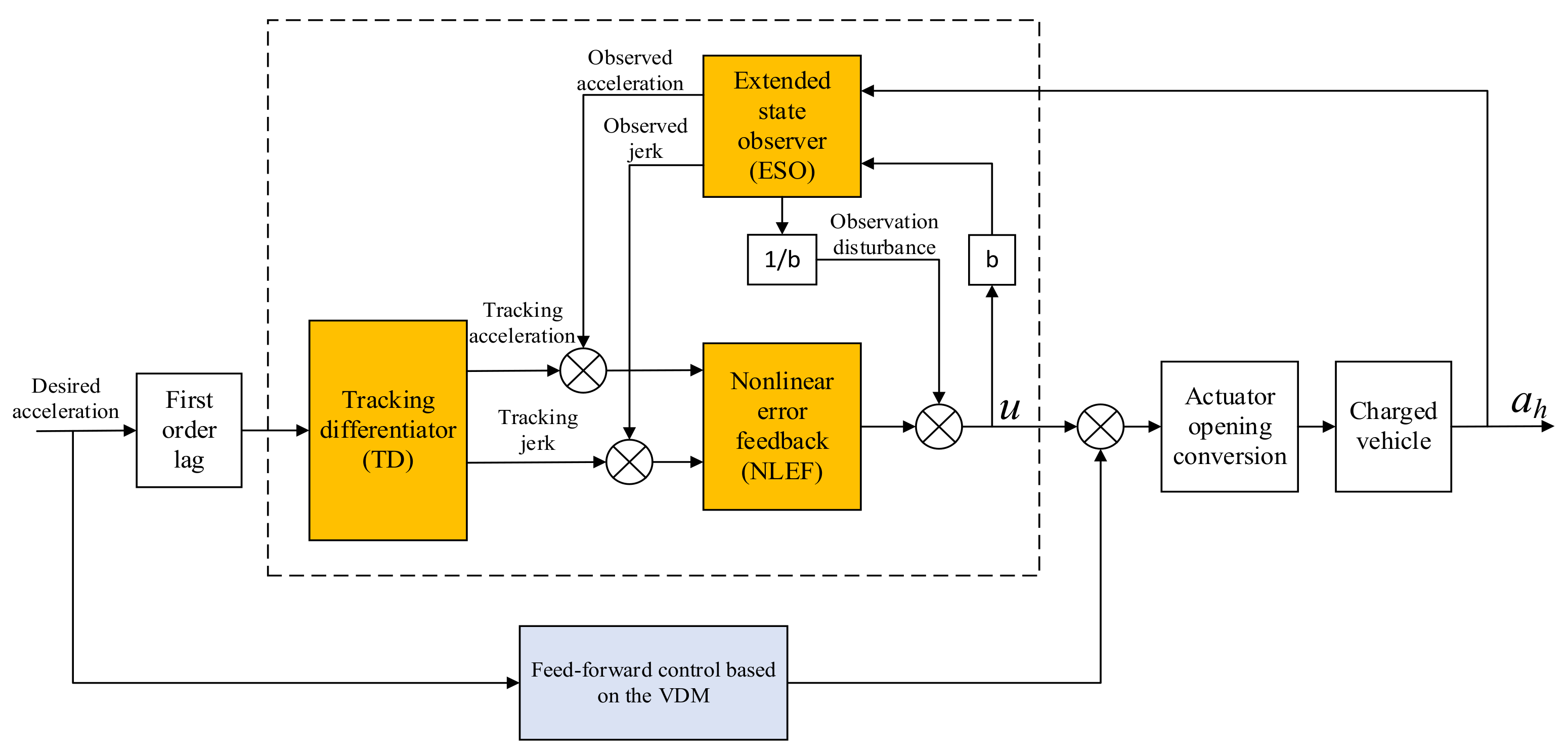
2.3.2. Compensatory Control Based on ADRC
2.3.3. Feed-Forward and ADRC Compensatory Control of the Lower Level
- Driving control:
- Braking control:
3. Road Testing Results and Discussion
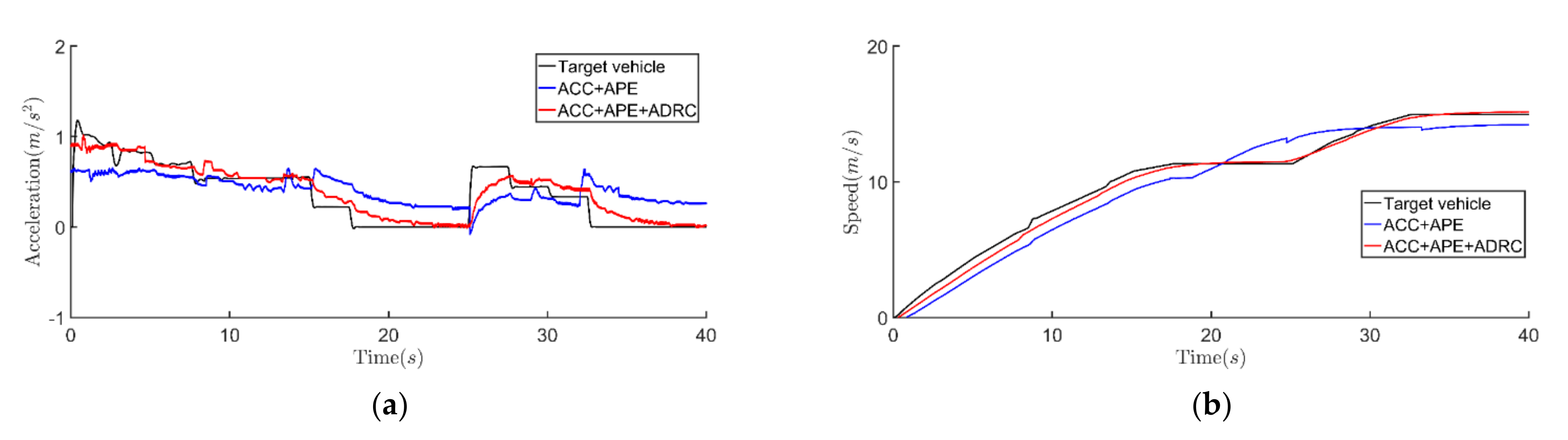
3.1. Testing Results of Case A
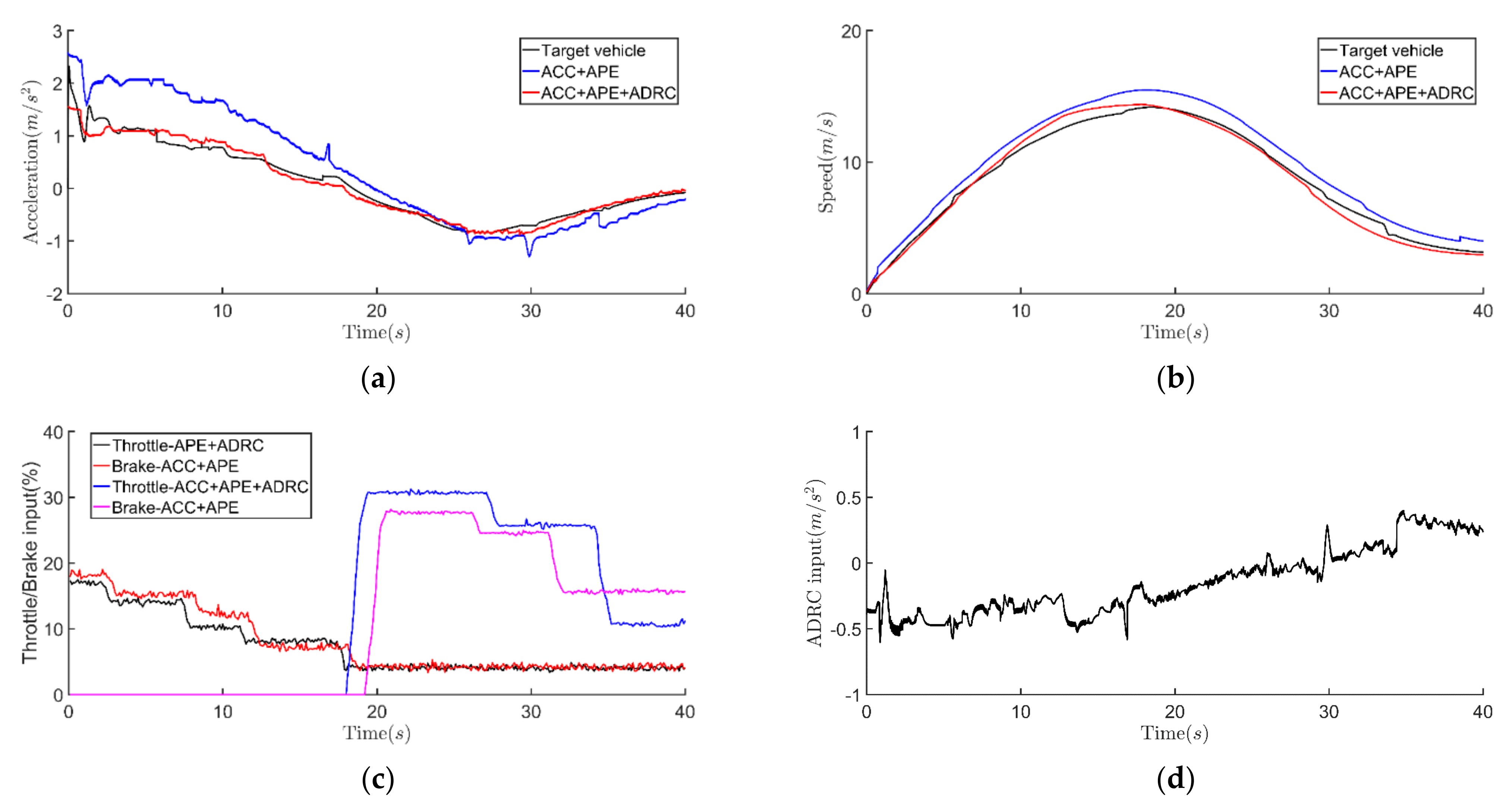
3.2. Testing Results of Case B
3.3. Testing Results of Case C
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Li, Y.; Li, Z.; Wang, H.; Wang, W.; Xing, L. Evaluating the safety impact of adaptive cruise control in traffic oscillations on freeways. Accid. Anal. Prev. 2017, 104, 137–145. [Google Scholar] [CrossRef] [PubMed]
- Lu, C.; Dong, J.; Hu, L.; Liu, C. An Ecological Adaptive Cruise Control for Mixed Traffic and Its Stabilization Effect. IEEE Access 2019, 7, 81246–81256. [Google Scholar] [CrossRef]
- James, R.M.; Melson, C.; Hu, J. Characterizing the impact of production adaptive cruise control on traffic flow: An investigation. Transp. B Transp. Dyn. 2019, 7, 992–1012. [Google Scholar] [CrossRef]
- Kim, H.; Min, K.; Sunwoo, M. Driver Characteristics Oriented Autonomous Longitudinal Driving System in Car-Following Situation. Sensors 2020, 20, 6376. [Google Scholar] [CrossRef] [PubMed]
- Bayuwindra, A.; Ploeg, J.; Lefeber, E.; Nijmeijer, H. Combined Longitudinal and Lateral Control of Car-Like Vehicle Platooning with Extended Look-Ahead. IEEE Trans. Control Syst. Technol. 2020, 28, 790–803. [Google Scholar] [CrossRef]
- Harfouch, Y.A.; Yuan, S.; Baldi, S. An Adaptive Switched Control Approach to Heterogeneous Platooning With Intervehicle Communication Losses. IEEE Trans. Control Netw. Syst. 2018, 5, 1434–1444. [Google Scholar] [CrossRef]
- Baldi, S.; Liu, D.; Jain, V.; Yu, W. Establishing Platoons of Bidirectional Cooperative Vehicles With Engine Limits and Uncertain Dynamics. IEEE Trans. Intell. Transp. Syst. 2020, 99, 1–13. [Google Scholar] [CrossRef]
- Zegers, J.C.; Semsar-Kazerooni, E.; Ploeg, J.; van de Wouw, N.; Nijmeijer, H. Consensus Control for Vehicular Platooning With Velocity Constraints. IEEE Trans. Control Syst. Technol. 2018, 26, 1592–1605. [Google Scholar] [CrossRef]
- Woo, H.; Madokoro, H.; Sato, K.; Tamura, Y.; Yamashita, A.; Asama, H. Advanced Adaptive Cruise Control Based on Operation Characteristic Estimation and Trajectory Prediction. Appl. Sci. 2019, 9, 4875. [Google Scholar] [CrossRef]
- Zhang, J.H.; Li, Q.; Chen, D.P. Integrated adaptive cruise control with weight coefficient self-tuning strategy. Appl. Sci. 2018, 8, 978. [Google Scholar] [CrossRef]
- Li, S.E.; Guo, Q.Q.; Xin, L.; Cheng, B.; Li, K.Q. Fuel-saving servo-loop control for an adaptive cruise control system of road vehicles with step-gear transmission. IEEE Trans. Veh. Technol. 2017, 66, 2033–2043. [Google Scholar] [CrossRef]
- Xiao, L.Y.; Gao, F. A comprehensive review of the development of adaptive cruise control systems. Veh. Syst. Dyn. 2010, 48, 1167–1192. [Google Scholar] [CrossRef]
- Zhang, J.L.; Loannou, P.A. Longitudinal control of heavy trucks in mixed traffic: Environmental and fuel economy considerations. IEEE Trans. Intell. Transp. Syst. 2006, 7, 92–104. [Google Scholar] [CrossRef]
- Yi, K.; Hong, J.; Kwon, Y.D. A vehicle control algorithm for stop-and-go cruise control. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2001, 215, 1099–1115. [Google Scholar] [CrossRef]
- Nie, Z.; Farzaneh, H. Adaptive Cruise Control for Eco-Driving Based on Model Predictive Control Algorithm. Appl. Sci. 2020, 10, 5271. [Google Scholar] [CrossRef]
- Li, S.E.; Deng, K.; Li, K.Q.; Ahn, C. Terminal sliding mode control of automated car-following system without reliance on longitudinal acceleration information. Mechatronics 2015, 30, 327–337. [Google Scholar] [CrossRef]
- Zhang, G.X.; Wang, Z.C.; Fan, B.W.; Zhao, L.; Qi, Y.Z. Adaptive cruise control system with traffic jam tracking function based on multi-sensors and the driving behavior of skilled drivers. Adv. Mech. Eng. 2018, 10, 1687814018795801. [Google Scholar] [CrossRef]
- Corona, D.B.; Schutter, D. Adaptive cruise control for a SMART car: A comparison benchmark for MPC-PWA control methods. IEEE Trans. Control Syst. Technol. 2008, 16, 365–372. [Google Scholar] [CrossRef]
- Luo, L.H.; Liu, H.; Li, P.; Wang, H. Model predictive control for adaptive cruise control with multi-objectives: Comfort, fuel-economy, safety and car-following. J. Zhejiang Univ. Sci. A 2010, 11, 191–201. [Google Scholar] [CrossRef]
- Zhao, R.C.; Wong, P.K.; Xie, Z.C.; Zhao, J. Real-time weighted multi-objective model predictive controller for adaptive cruise control systems. Int. J. Automot. Technol. 2017, 18, 279–292. [Google Scholar] [CrossRef]
- Zhu, M.; Chen, H.Y.; Xiong, G.M. A model predictive speed tracking control approach for autonomous ground vehicles. Mech. Syst. Signal Proc. 2017, 87, 138–152. [Google Scholar] [CrossRef]
- Guo, L.; Ge, P.; Sun, D.; Qiao, Y. Adaptive Cruise Control Based on Model Predictive Control with Constraints Softening. Appl. Sci. 2020, 10, 1635. [Google Scholar] [CrossRef]
- Luo, Y.G.; Chen, T.; Li, K.Q. Nonlinear model predictive cruise control of hybrid electric vehicle. Chin. J. Mech. Eng. 2015, 51, 11–21. [Google Scholar] [CrossRef]
- Plessen, M.G.; Bernardini, D.; Hasan, E.; Alberto, B. Spatial-based predictive control and geometric corridor planning for adaptive cruise control coupled with obstacle avoidance. IEEE Trans. Control Syst. Technol. 2018, 26, 38–50. [Google Scholar] [CrossRef]
- Naus, G.J.L.; Ploeg, J.; Van de Molengraft, M.J.G.; Heemels, W.P.M.H.; Steinbuch, M. Design and implementation of parameterized adaptive cruise control: An explicit model predictive control approach. Control Eng. Pract. 2010, 18, 882–892. [Google Scholar] [CrossRef]
- Dominik, M.; Roman, S.; Harald, W.; Luigi, R. Flexible spacing adaptive cruise control using stochastic model predictive control. IEEE Trans. Control Syst. Technol. 2018, 26, 114–127. [Google Scholar]
- Brugnolli, M.M.; Angelico, B.A.; Lagana, A.A.M. Predictive adaptive cruise control using a customized ECU. IEEE Access 2019, 7, 55305–55317. [Google Scholar] [CrossRef]
- Andreas, W.; Daniel, G.; Lin, X.H. Energy-optimal adaptive cruise control combining model predictive control and dynamic programming. Control Eng. Pract. 2018, 72, 125–137. [Google Scholar]
- Zhang, Z.T.; Luo, D.Y.; Yagubov, R.; Li, Y.J.; Meng, G.J.; Xu, J.; Wang, C.B. A vehicle active safety model: Vehicle speed control based on driver vigilance detection using wearable EEG and sparse representation. Sensors 2016, 16, 242. [Google Scholar] [CrossRef]
- Dileep, K.; Sreedeep, K.; Akhil, J. Vehicular adaptive cruise control using laguerre functions model predictive control. Int. J. Eng. Technol. 2018, 10, 1719–1730. [Google Scholar]
- Cheng, S.; Li, L.; Mei, M.M.; Nie, Y.L.; Zhao, L. Multiple-objective adaptive cruise control system integrated with DYC. IEEE Trans. Veh. Technol. 2019, 68, 4550–4559. [Google Scholar] [CrossRef]
- Lin, X.H.; Daniel, G.; Andreas, W. Simplified energy-efficient adaptive cruise control based on model predictive control. IFAC-PapersOnLine 2017, 50, 4794–4799. [Google Scholar] [CrossRef]
- Eleonora, V.; Vasiliki, A.; Lourenco, S.F.; Longo, M.R. Action ability modulates time-to-collision judgments. Exp. Brain Res. 2017, 235, 2729–2739. [Google Scholar]
- Moon, S.; Yi, K. Human driving data-based design of a vehicle adaptive cruise control algorithm. Veh. Syst. Dyn. 2008, 46, 661–690. [Google Scholar] [CrossRef]
- Jazar, R.N. Vehicle dynamics: Theory and application. J. Guid. Control Dyn. 2017, 33, 287–288. [Google Scholar]
- Xing, H.; Jeon, J.; Park, K.C.; Oh, I. Active Disturbance Rejection Control for Precise Position Tracking of Ionic Polymer–Metal Composite Actuators. IEEE/ASME Trans. Mechatron. 2013, 18, 86–95. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Control Method | Average (m/s2) | Standard Deviation (m/s2) | Range (m/s2) |
|---|---|---|---|
| ACC | 0.2408 | 0.5188 | 1.8557 |
| ACC + APE | 0.2148 | 0.4688 | 1.6371 |
| Control Method | Average (m/s2) | Standard Deviation (m/s2) | Range (m/s2) |
|---|---|---|---|
| Without ADRC | 0.5656 | 0.9557 | 1.7469 |
| With ADRC | 0.2303 | 0.2819 | 0.9414 |
| Control Method | Average (m/s2) | Standard Deviation (m/s2) | Range (m/s2) |
|---|---|---|---|
| Without ADRC | 1.0247 | 1.4372 | 2.2415 |
| With ADRC | 0.1639 | 0.4654 | 0.8344 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, Z.; Wang, Z.; Yan, M. An Optimization Design of Adaptive Cruise Control System Based on MPC and ADRC. Actuators 2021, 10, 110. https://doi.org/10.3390/act10060110
Yang Z, Wang Z, Yan M. An Optimization Design of Adaptive Cruise Control System Based on MPC and ADRC. Actuators. 2021; 10(6):110. https://doi.org/10.3390/act10060110
Chicago/Turabian StyleYang, Zengfu, Zengcai Wang, and Ming Yan. 2021. "An Optimization Design of Adaptive Cruise Control System Based on MPC and ADRC" Actuators 10, no. 6: 110. https://doi.org/10.3390/act10060110
APA StyleYang, Z., Wang, Z., & Yan, M. (2021). An Optimization Design of Adaptive Cruise Control System Based on MPC and ADRC. Actuators, 10(6), 110. https://doi.org/10.3390/act10060110