
Design and Analysis of Dual Mover Multi-Tooth Permanent Magnet Flux Switching Machine for Ropeless Elevator Applications

 ,
,  , , and
, , and
Abstract
1. Introduction
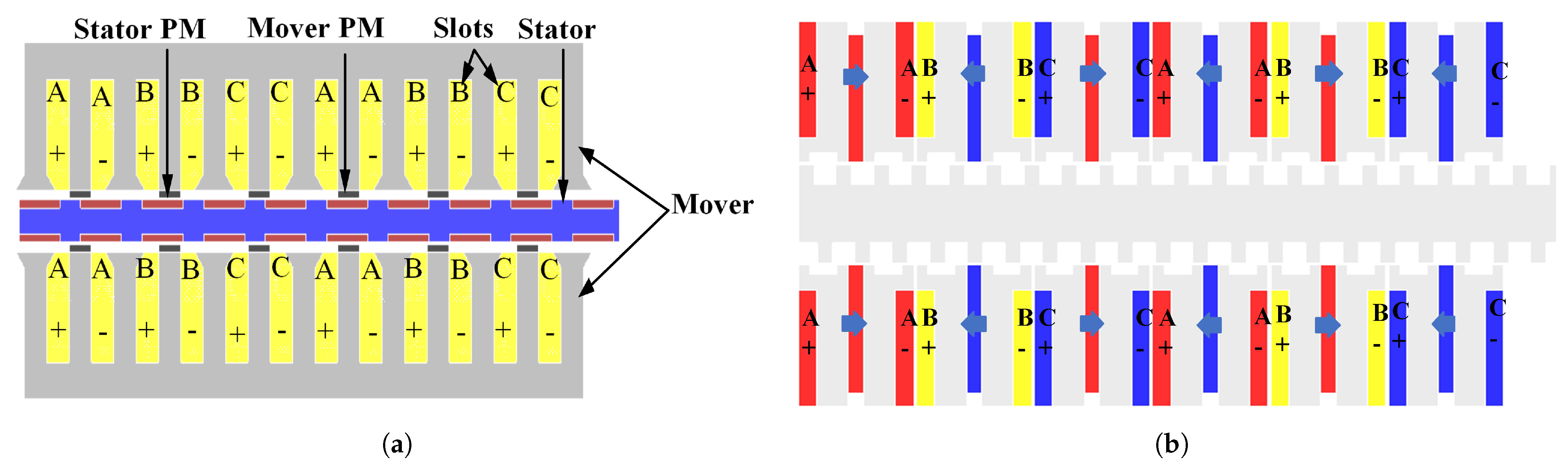
2. Topology and Operation Principle
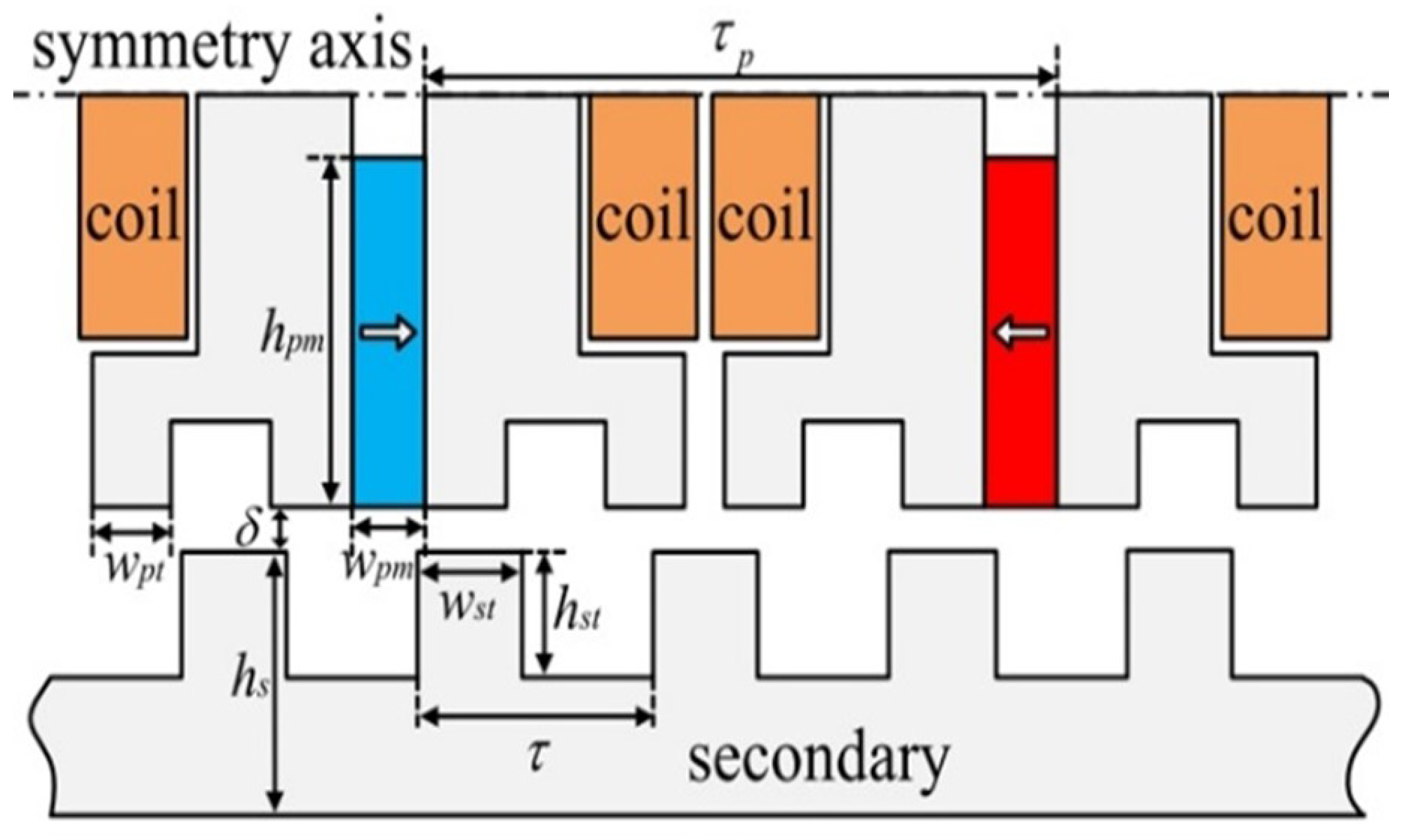
2.1. Configuration and Design Parameters
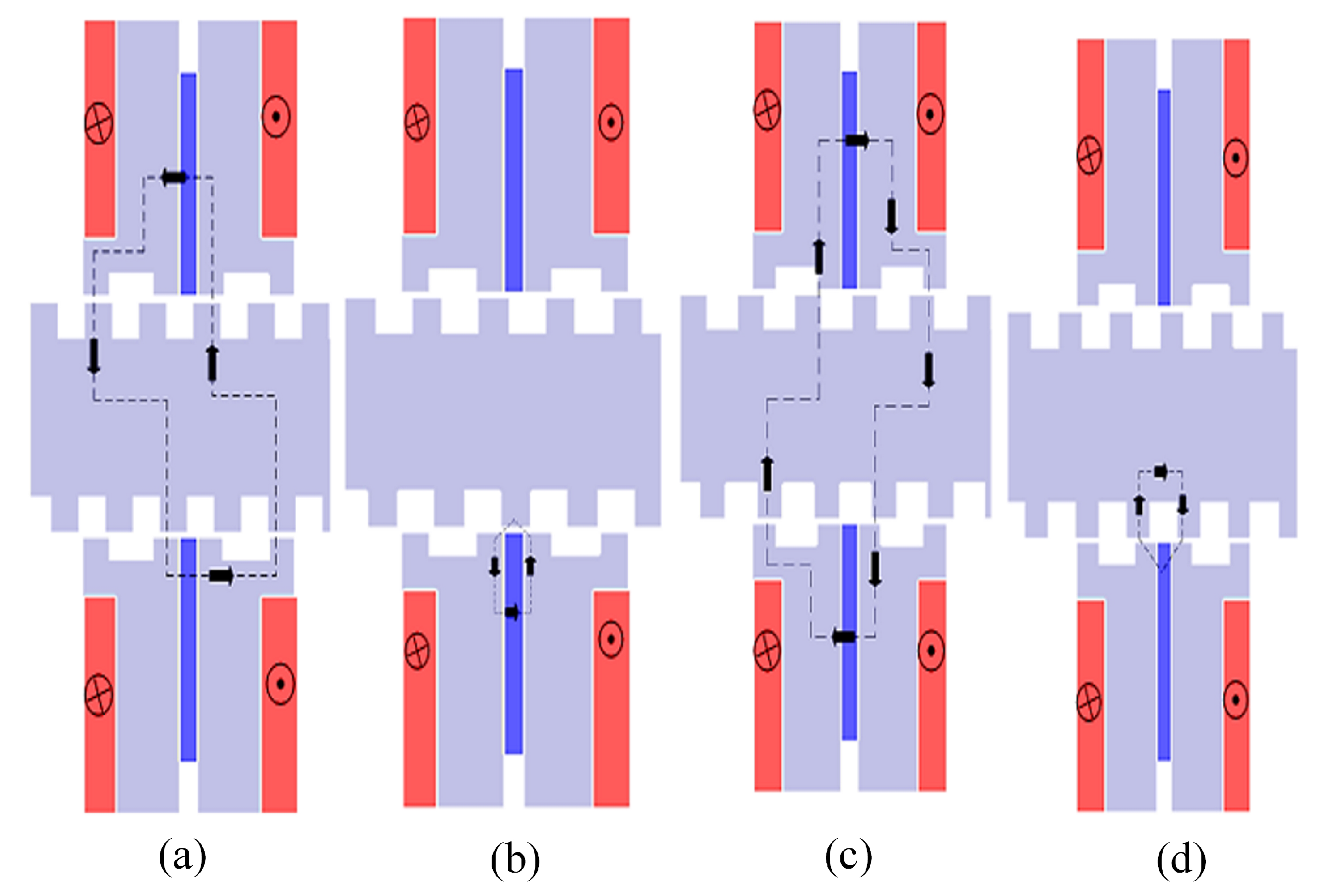
2.2. Operation Principle
3. Performance Analysis of Initial Design
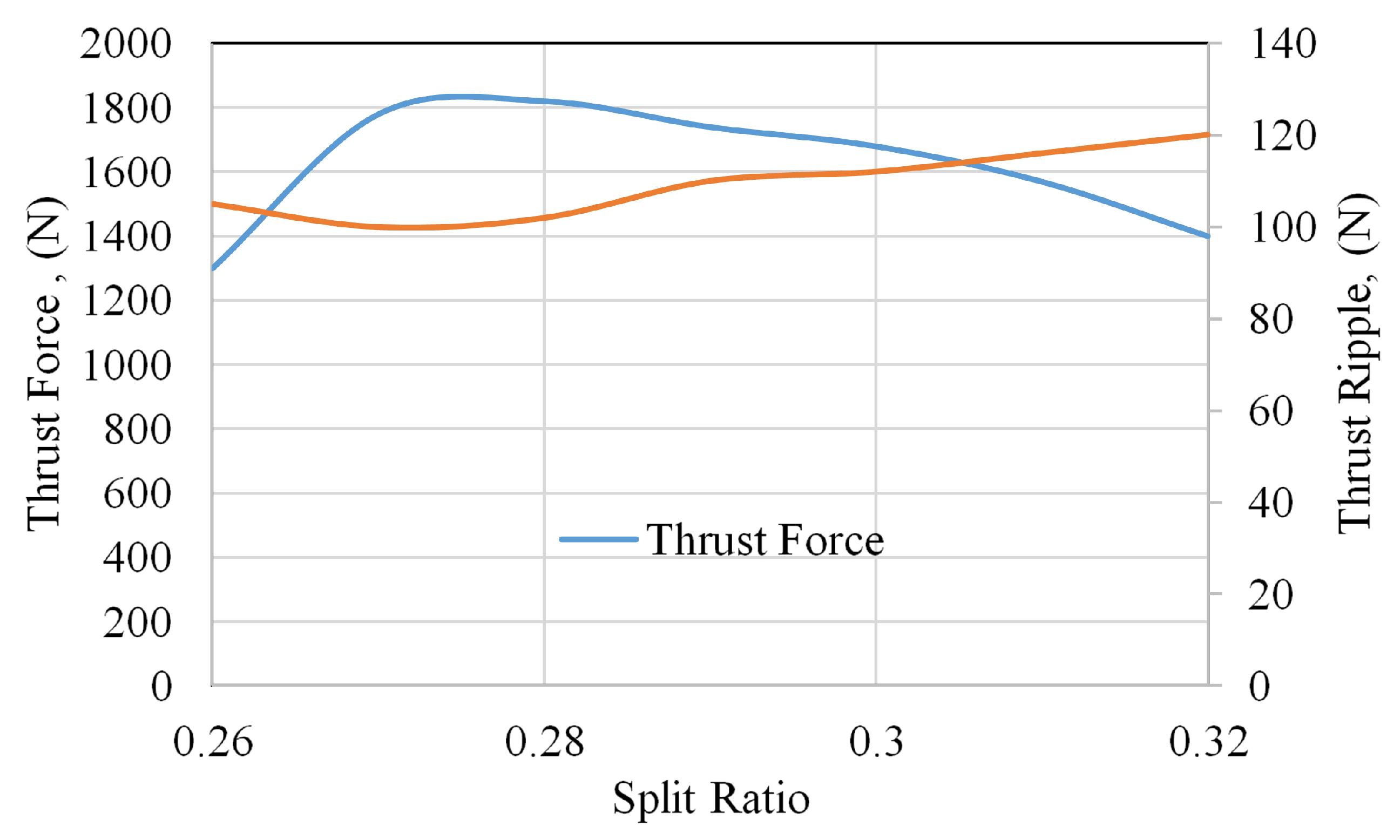
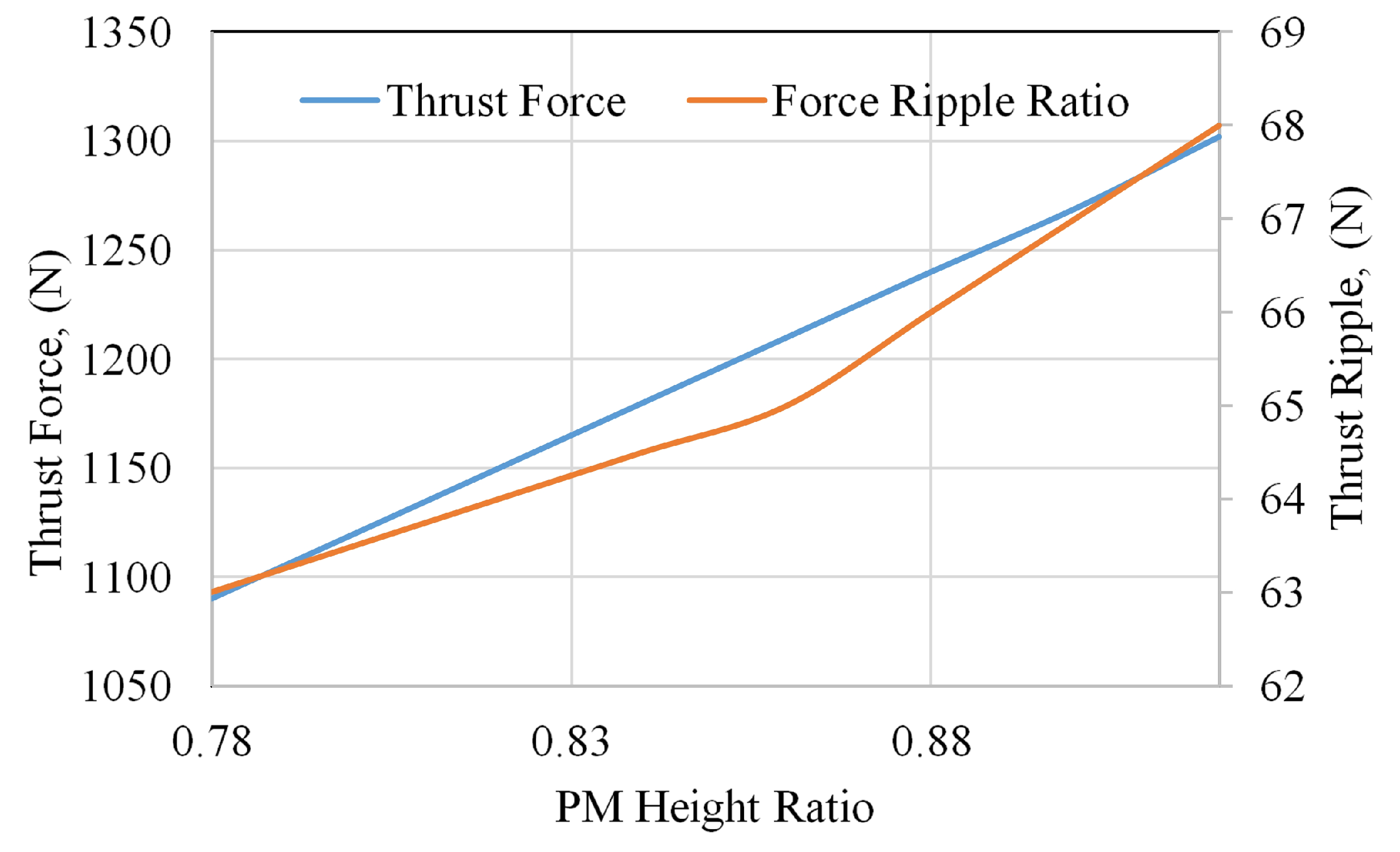
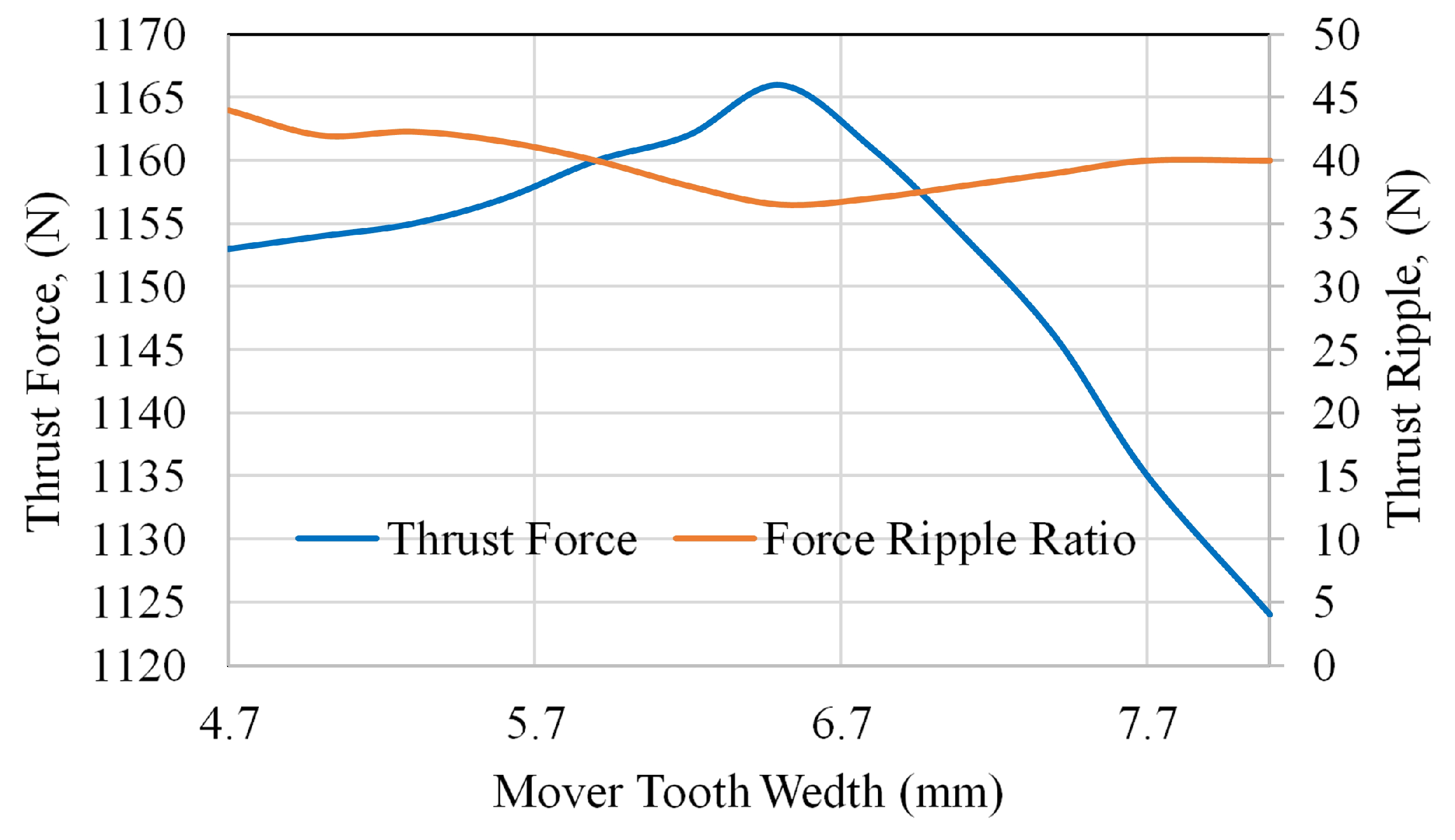
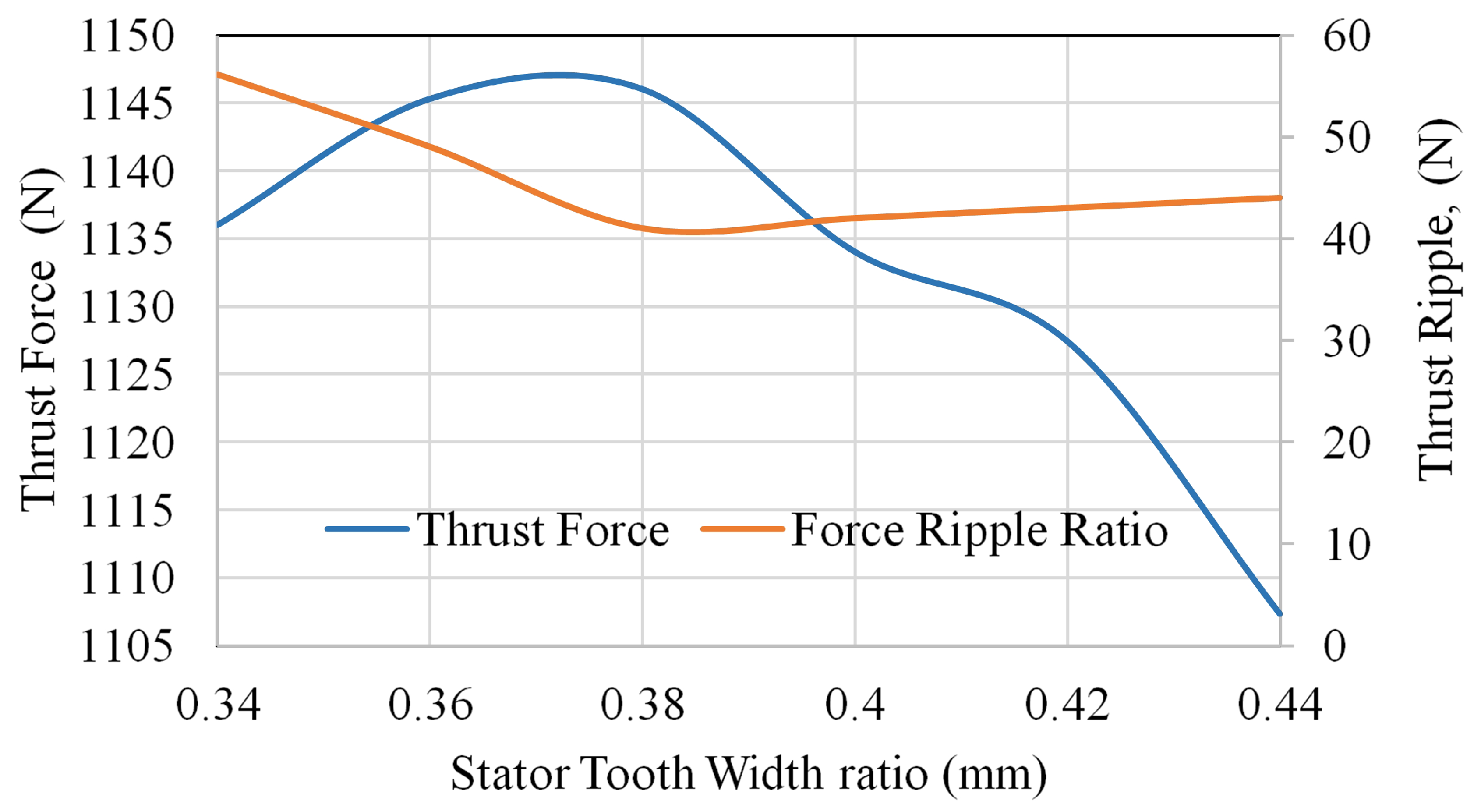
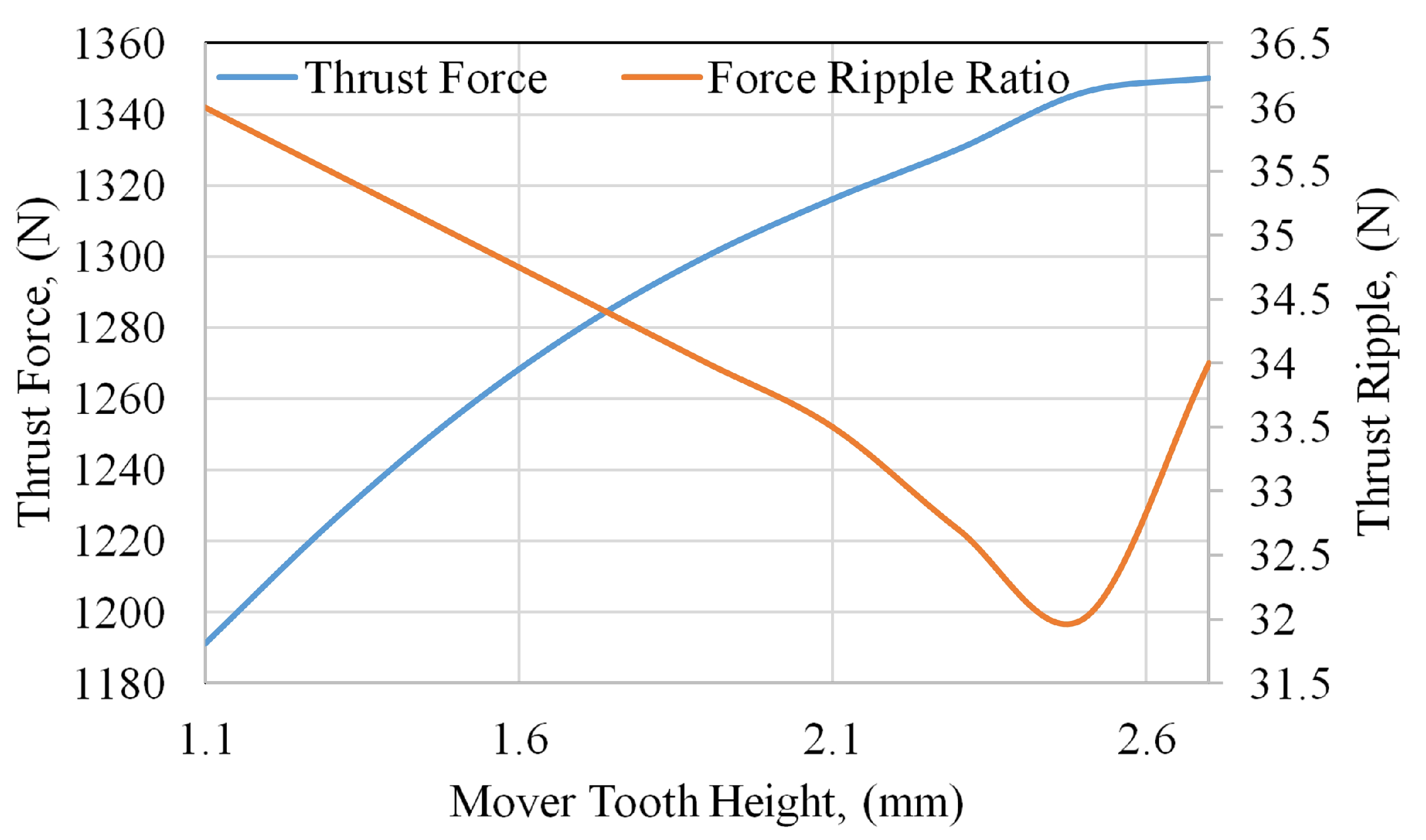
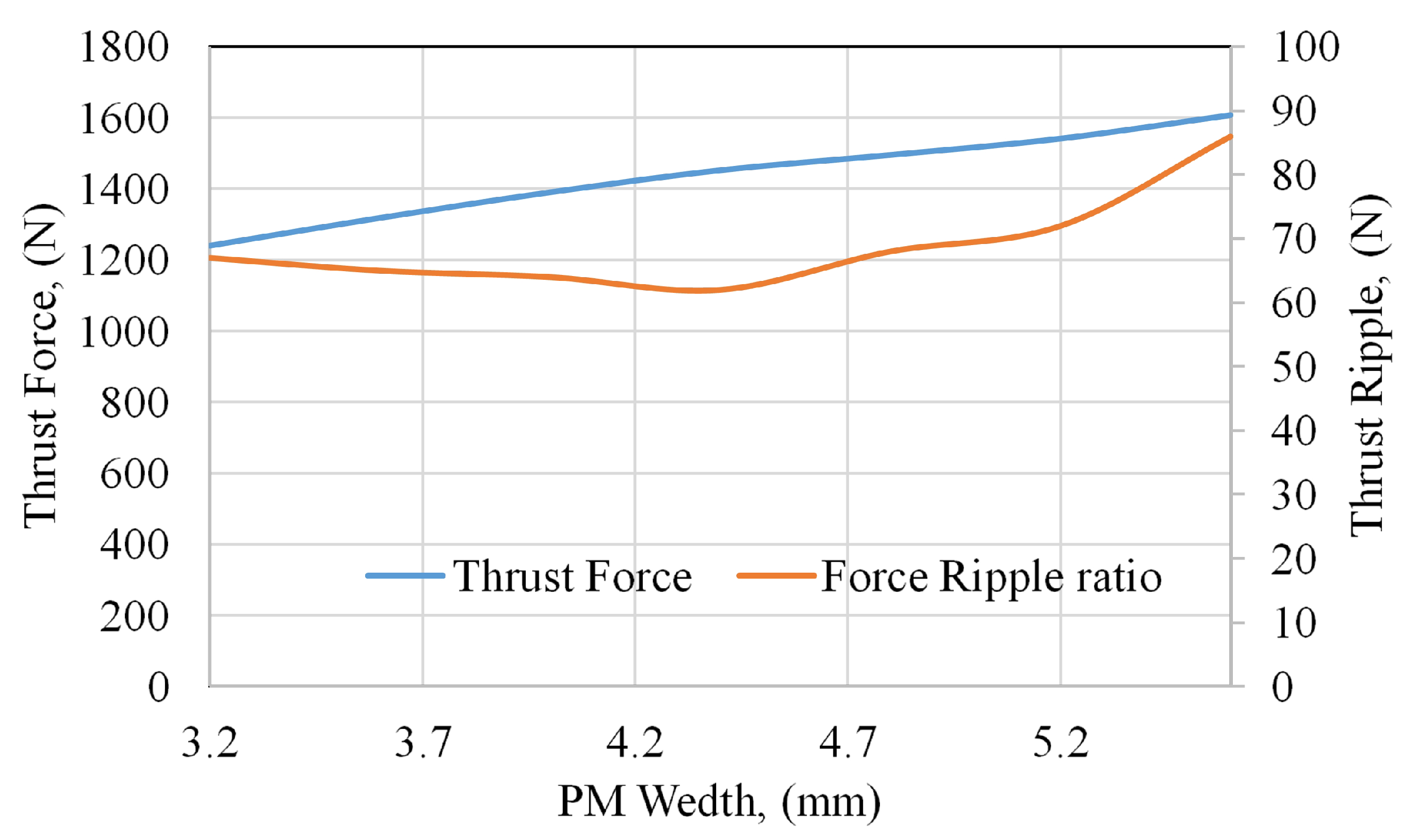
4. Single Variable Optimization for the Proposed Design
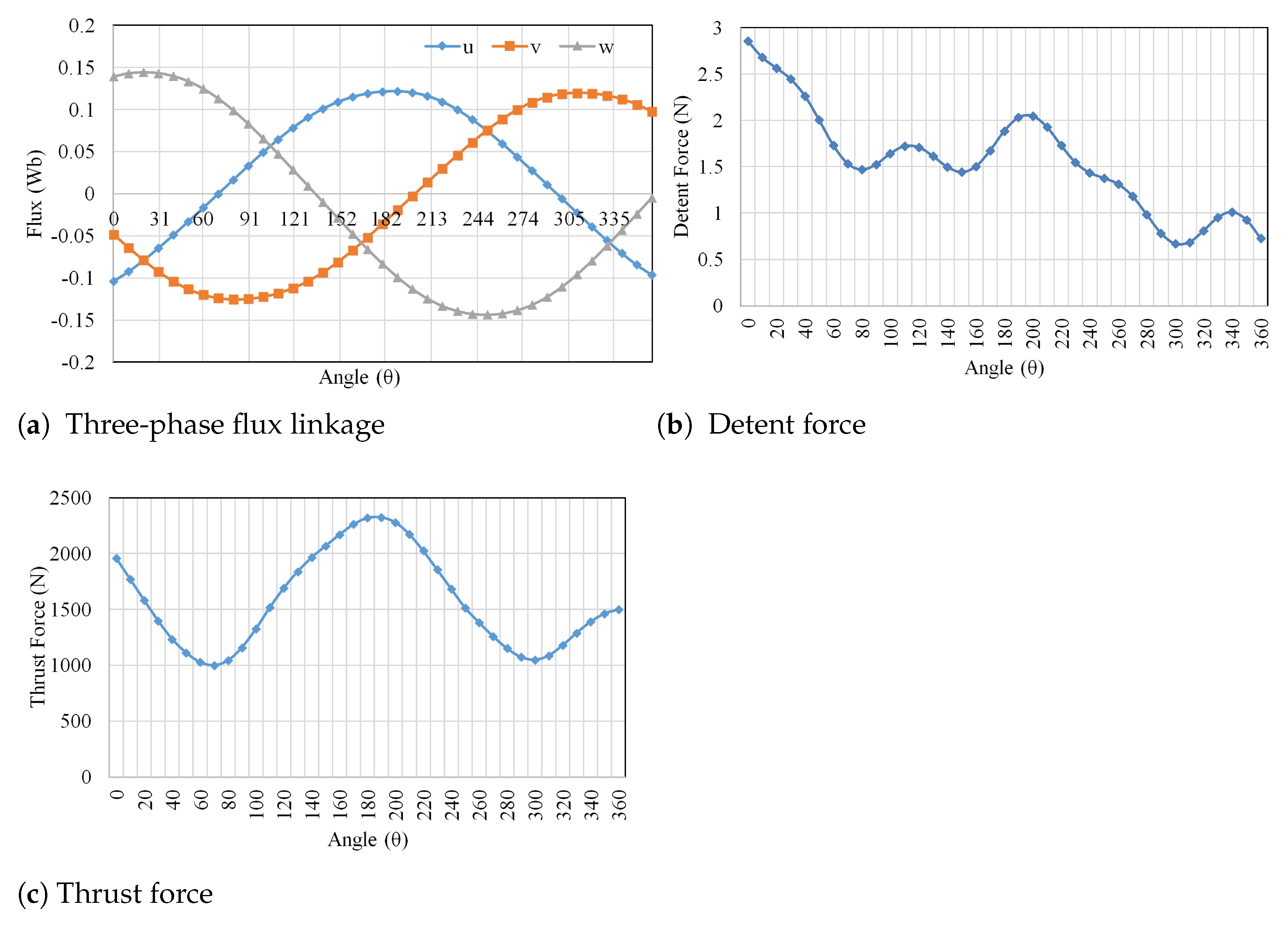
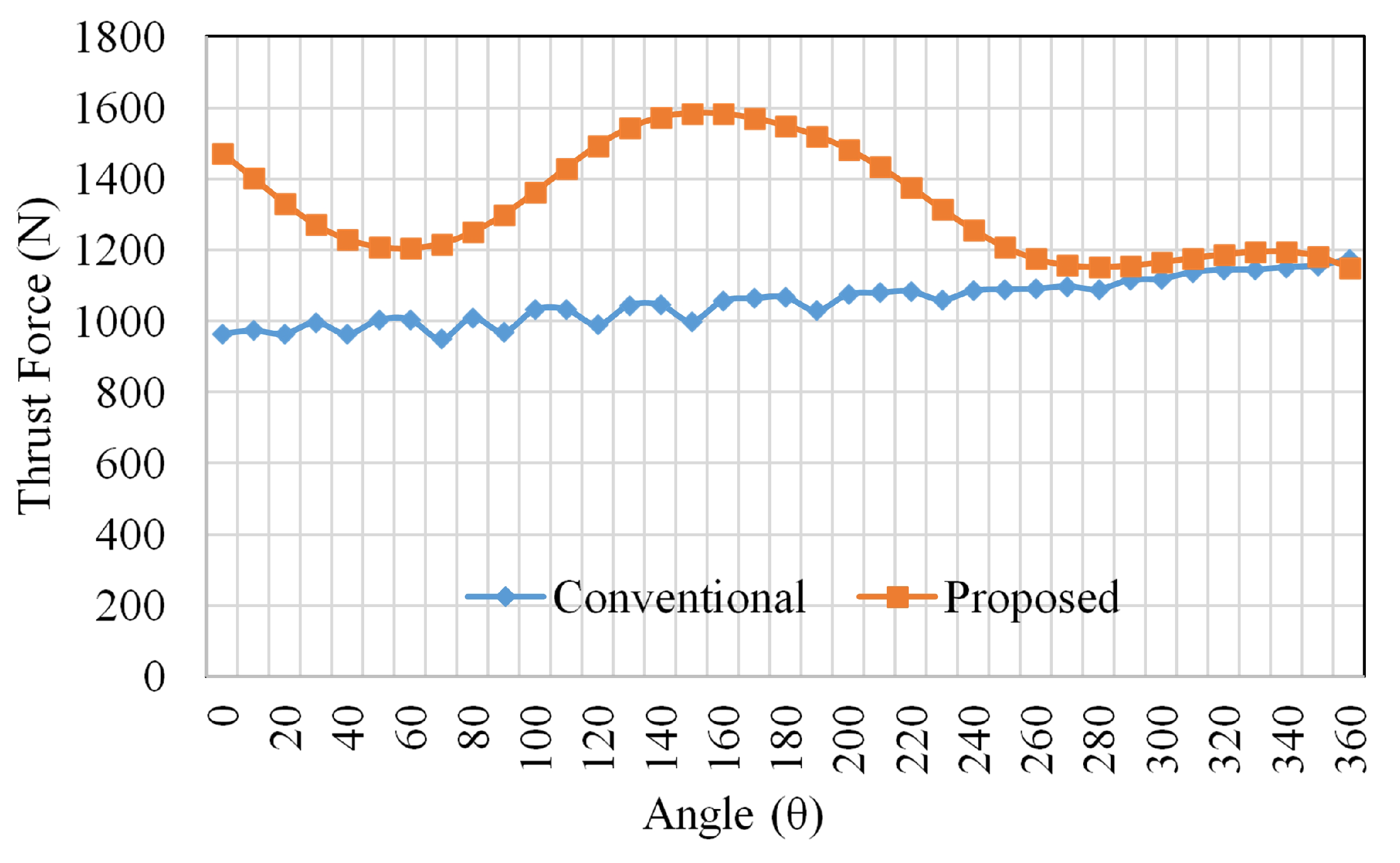
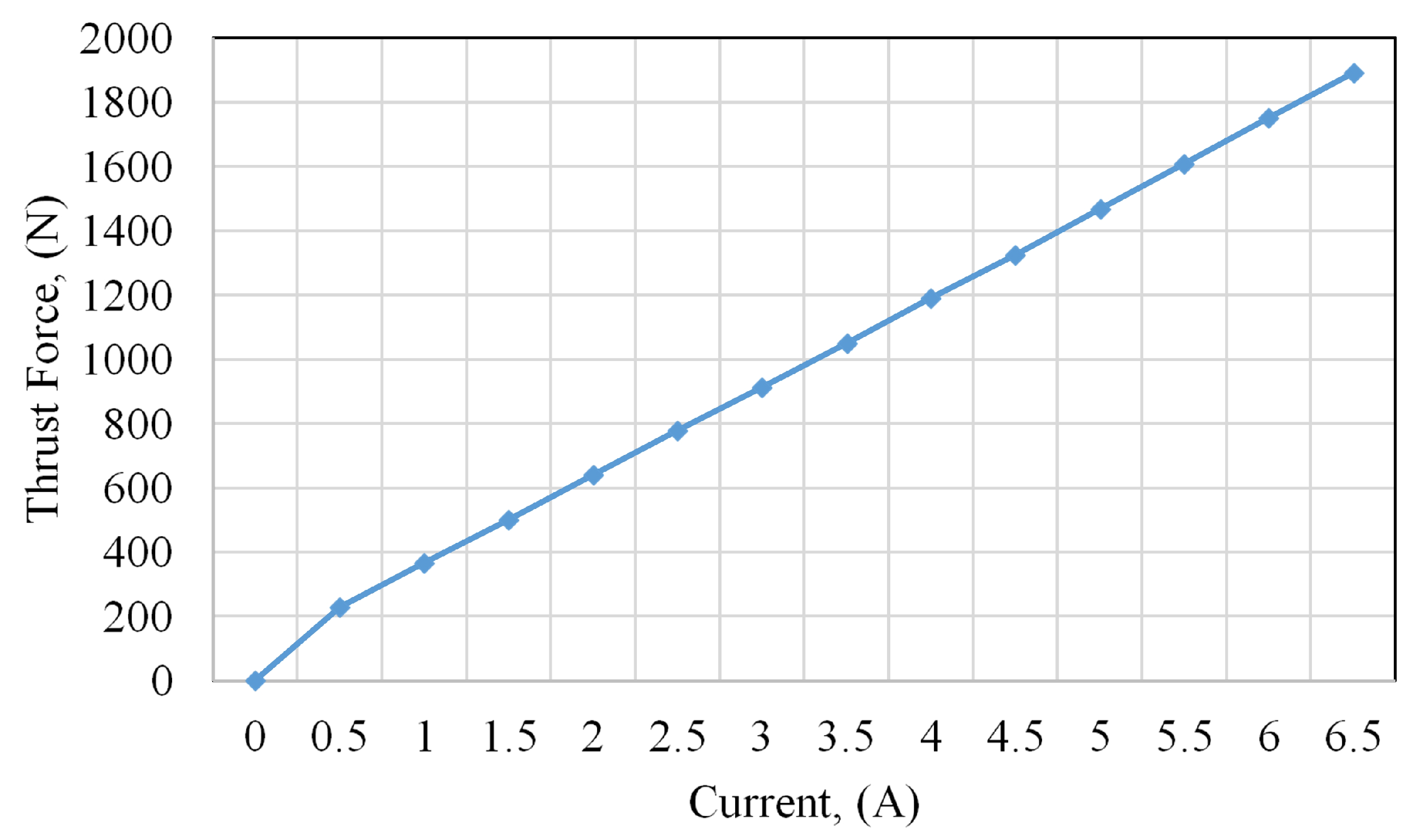
5. Electromagnetic Performance Analysis
6. Analytical Validation of Detent Force and Thrust Force
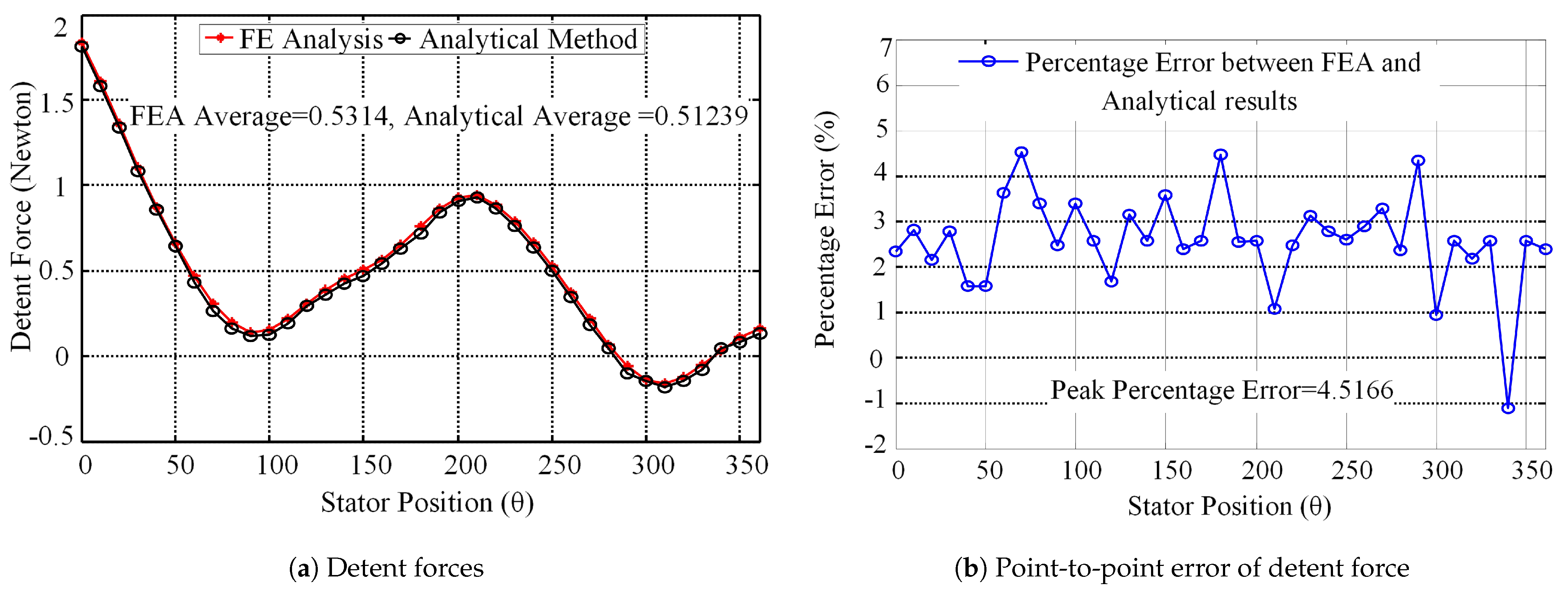
6.1. Analytical Validation of Detent Force
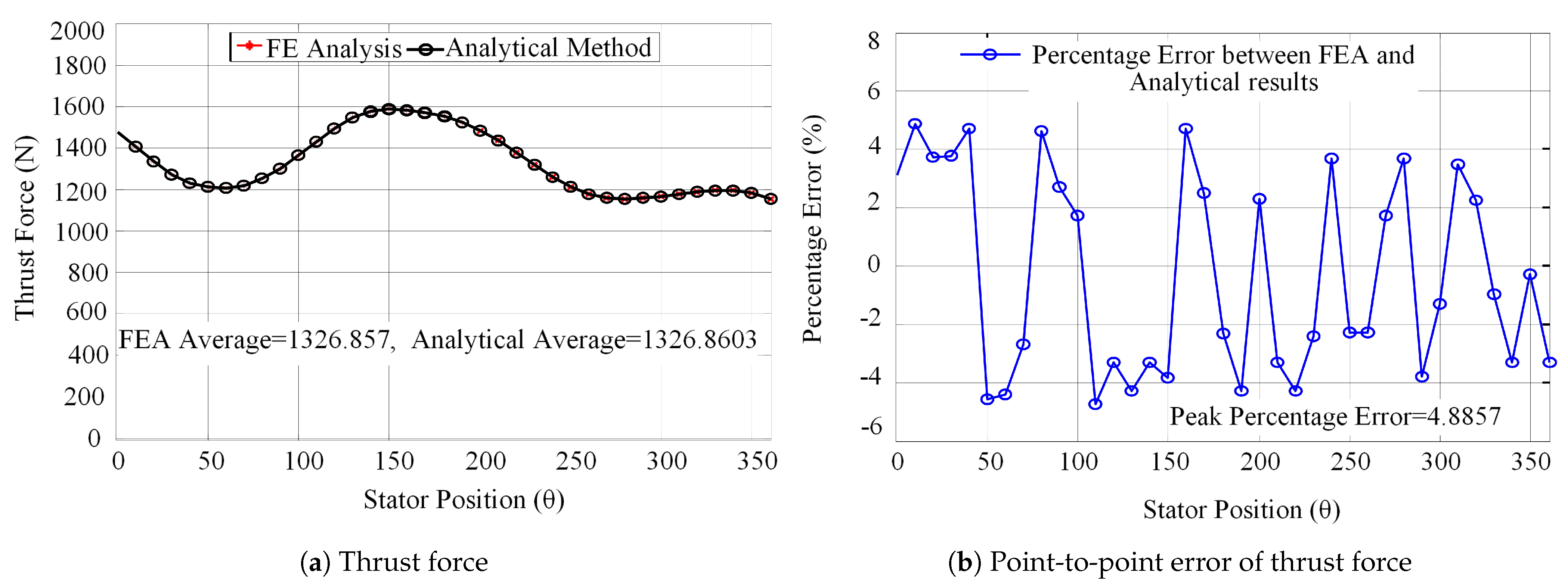
6.2. Analytical Validation of Average Thrust Force
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Amara, Y.; Barakat, G. Analytical modeling of magnetic field in surface mounted permanent-magnet tubular linear machines. IEEE Trans. Magn. 2010, 46, 38703884. [Google Scholar] [CrossRef]
- Chen, J.T.; Zhu, Z.Q.; Howe, D. Stator and rotor pole combinations for multi-tooth flux-switching permanent-magnet brushless AC machines. IEEE Trans. Magn. 2008, 44, 4659–4667. [Google Scholar] [CrossRef]
- Du, Y.; Ming, C.; Chau, K.T.; Xianxing, L.; Feng, X.; Wenxiang, Z.; Kai, S.; Lihong, M. Comparison of linear primary permanent magnet vernier machine and linear vernier hybrid machine. IEEE Trans. Magn. 2014, 50, 1–4. [Google Scholar] [CrossRef]
- Fan, H.; Chau, K.T.; Chunhua, L.; Libing, C.; Ching, T.W. Quantitative Comparison of Novel Dual-PM Linear Motors for Ropeless Elevator System. IEEE Trans. Magn. 2018, 99, 1–6. [Google Scholar] [CrossRef]
- Gandhi, A.; Parsa, L. Thrust optimization of a flux-switching linear synchronous machine with yokeless translator. IEEE Trans. Magn. 2013, 49, 1436–1443. [Google Scholar] [CrossRef]
- Lee, S.G.; Sung, A.K.; Subrat, S.; Yu, W.Z.; Yun, H.C. Optimal structure design for minimizing detent force of PMLSM for a ropeless elevator. IEEE Trans. Magn. 2014, 50, 1–4. [Google Scholar] [CrossRef]
- Lim, H.S.; Ramu, K.; Nimal, S.L. Design and control of a linear propulsion system for an elevator using linear switched reluctance motor drives. IEEE Trans. Ind. Elect. 2008, 55, 534–542. [Google Scholar] [CrossRef]
- Lim, H.S.; Ramu, K. Ropeless elevator with linear switched reluctance motor drive actuation systems. IEEE Trans. Ind. Elect. 2007, 54, 2209–2218. [Google Scholar] [CrossRef]
- Liu, Q.; Haitao, Y.; Minqiang, H.; Chunyuan, L.; Jing, Z.; Lei, H.; Shigui, Z. Cogging force reduction of double-sided linear flux-switching permanent magnet machine for direct drives. IEEE Trans. Magn. 2013, 49, 2275–2278. [Google Scholar] [CrossRef]
- Liu, C.; Chau, K.T.; Wenlong, L. Comparison of fault-tolerant operations for permanent-magnet hybrid brushless motor drive. IEEE Trans. Magn. 2010, 46, 1378–1381. [Google Scholar] [CrossRef]
- Lobo, N.S.; Hong, L.; Krishnan, R. Comparison of linear switched reluctance machines for vertical propulsion application: Analysis, design, and experimental correlation. IEEE Trans. Ind. Appl. 2008, 44, 1134–1142. [Google Scholar] [CrossRef]
- Lu, Q.; Li, H.; Huang, X.; Ye, Y. Research on yokeless double-sided multi-tooth flux-switching linear motor. Int. J. Comput. Math. Elect. Electron. Eng. COMPEL 2016, 35, 832–843. [Google Scholar] [CrossRef]
- Onat, A.; Kazan, E.; Takahashi, N.; Miyagi, D.; Komatsu, Y.; Markon, S. Design and implementation of a linear motor for multicar elevators. IEEE/ASME Trans. Mechatronics 2010, 15, 685–693. [Google Scholar] [CrossRef]
- Wang, C.F.; Jian, X.S.; Yu, W.; Li, L.W.; Meng, J.J. A new method for reduction of detent force in permanent magnet flux-switching linear motors. IEEE Trans. Magn. 2009, 45, 2843–2846. [Google Scholar] [CrossRef]
- Yiming, S.; Lu, Q.; Li, H.; Cai, J.; Huang, X.; Fang, Y. Analysis of a Novel Double-Sided Yokeless Multitooth Linear Switched-Flux PM Motor. IEEE Trans. Ind. Elect. 2018, 65, 1837–1845. [Google Scholar] [CrossRef]
- Zhang, B.; Ming, C.; Sa, Z.; Mingli, Z.; Wei, H.; Ruiwu, C. Investigation of linear flux-switching permanent magnet machine for ropeless elevator. In Proceedings of the IEEE 19th International Conference Electrical Machines and Systems (ICEMS), Chiba, Japan, 13–16 November 2016; pp. 1–5. [Google Scholar]
- Sami, I.; Ullah, S.; Ali, Z.; Ullah, N.; Ro, J.-S. A Super Twisting Fractional Order Terminal Sliding Mode Control for DFIG-Based Wind Energy Conversion System. Energies 2020, 13, 2158. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Conventional | Proposed |
|---|---|---|
| Np | 12 | 12 |
| Primary slot pitch, Tp (mm) | 26.2 | 50.4 |
| Motor Height, h | 93 | 93 |
| air gap length (mm) | 1.5 | 1.5 |
| Stack length, L (mm) | 200 | 200 |
| Wire size (mm) | 0.8 | 0.8 |
| Number of turns | 200 | 200 |
| PM Height | 3 | 37.5 |
| PM width, Wpm (mm) | 13.1 | 3.2 |
| Primary Tooth width, Wpt (mm) | 2.2 | 2.2 |
| Mover length, (mm) | 300 | 300 |
| Average Speed (m/s) | 1 | 1 |
| Current (A) | 4.5 | 4.5 |
| Parameters | Initial Values | Optimal Values |
|---|---|---|
| Split Ratio | 0.31 | 0.27 |
| PM Height ratio | 0.78 | 0.85 |
| Stator tooth width ratio | 0.34 | 0.375 |
| Mover tooth width (mm) | 4.7 | 6.5 |
| PM width (mm) | 5.6 | 4.3 |
| Mover tooth height (mm) | 1.7 | 2.5 |
| Performance Parameters | Initial Values | Optimal Values |
|---|---|---|
| Detent Force | 1.6 | 0.5 |
| Thrust Force | 1570 | 1326 |
| Thrust Ripple Ratio | 84.4 | 32.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zahid, A.; Khan, F.; Ahmad, N.; Sami, I.; Ullah, W.; Ullah, N.; Ullah, N.; Alkhammash, H.I. Design and Analysis of Dual Mover Multi-Tooth Permanent Magnet Flux Switching Machine for Ropeless Elevator Applications. Actuators 2021, 10, 81. https://doi.org/10.3390/act10040081
Zahid A, Khan F, Ahmad N, Sami I, Ullah W, Ullah N, Ullah N, Alkhammash HI. Design and Analysis of Dual Mover Multi-Tooth Permanent Magnet Flux Switching Machine for Ropeless Elevator Applications. Actuators. 2021; 10(4):81. https://doi.org/10.3390/act10040081
Chicago/Turabian StyleZahid, Atif, Faisal Khan, Naseer Ahmad, Irfan Sami, Wasiq Ullah, Nasim Ullah, Noman Ullah, and Hend I. Alkhammash. 2021. "Design and Analysis of Dual Mover Multi-Tooth Permanent Magnet Flux Switching Machine for Ropeless Elevator Applications" Actuators 10, no. 4: 81. https://doi.org/10.3390/act10040081
APA StyleZahid, A., Khan, F., Ahmad, N., Sami, I., Ullah, W., Ullah, N., Ullah, N., & Alkhammash, H. I. (2021). Design and Analysis of Dual Mover Multi-Tooth Permanent Magnet Flux Switching Machine for Ropeless Elevator Applications. Actuators, 10(4), 81. https://doi.org/10.3390/act10040081