
Vibration Control of a High-Rise Slender Structure with a Spring Pendulum Pounding Tuned Mass Damper




Abstract
1. Introduction
2. Mechanism of the SPPTMD
2.1. Mechanism of the SMP
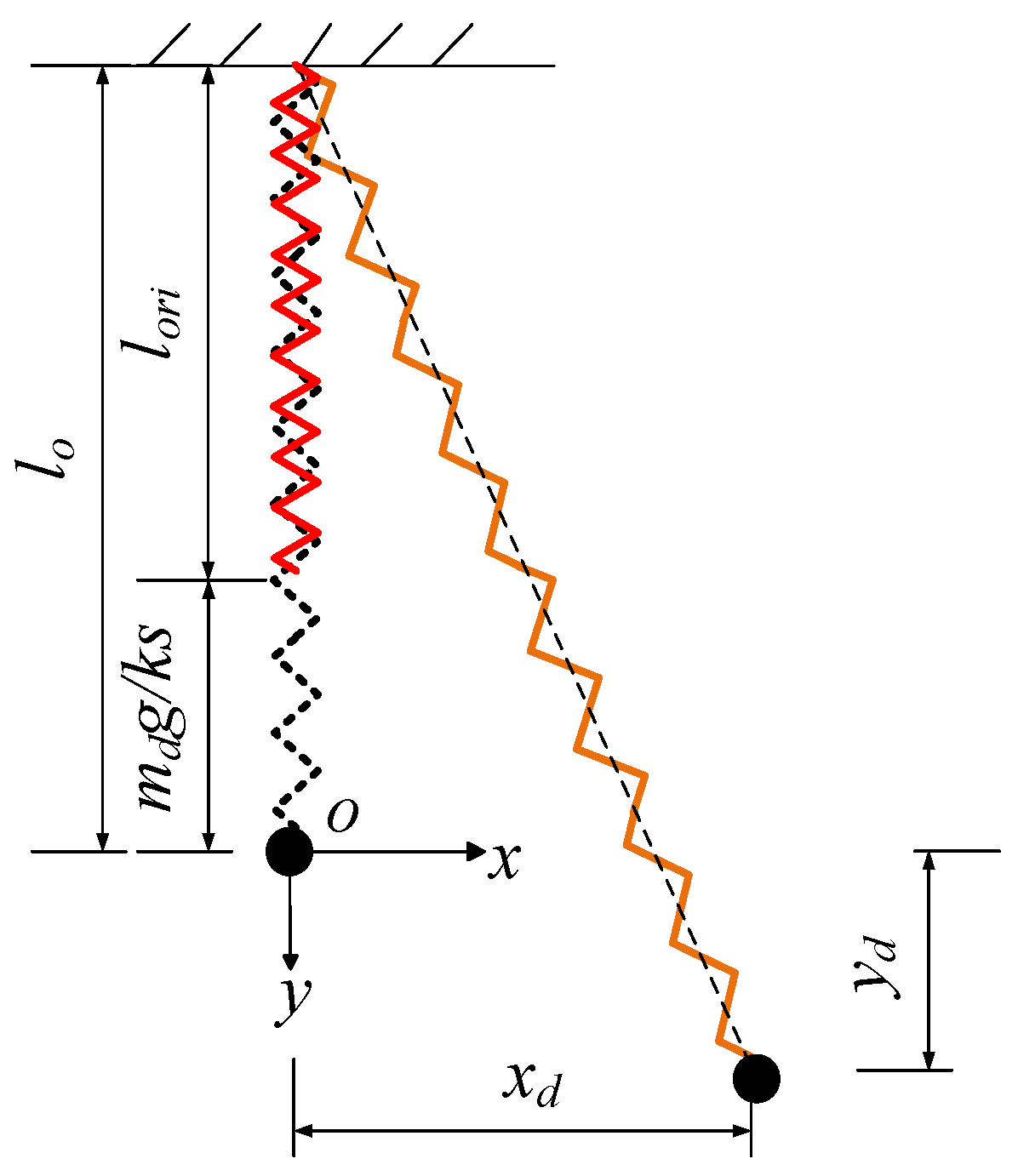
2.2. Mathematical Model of the SP
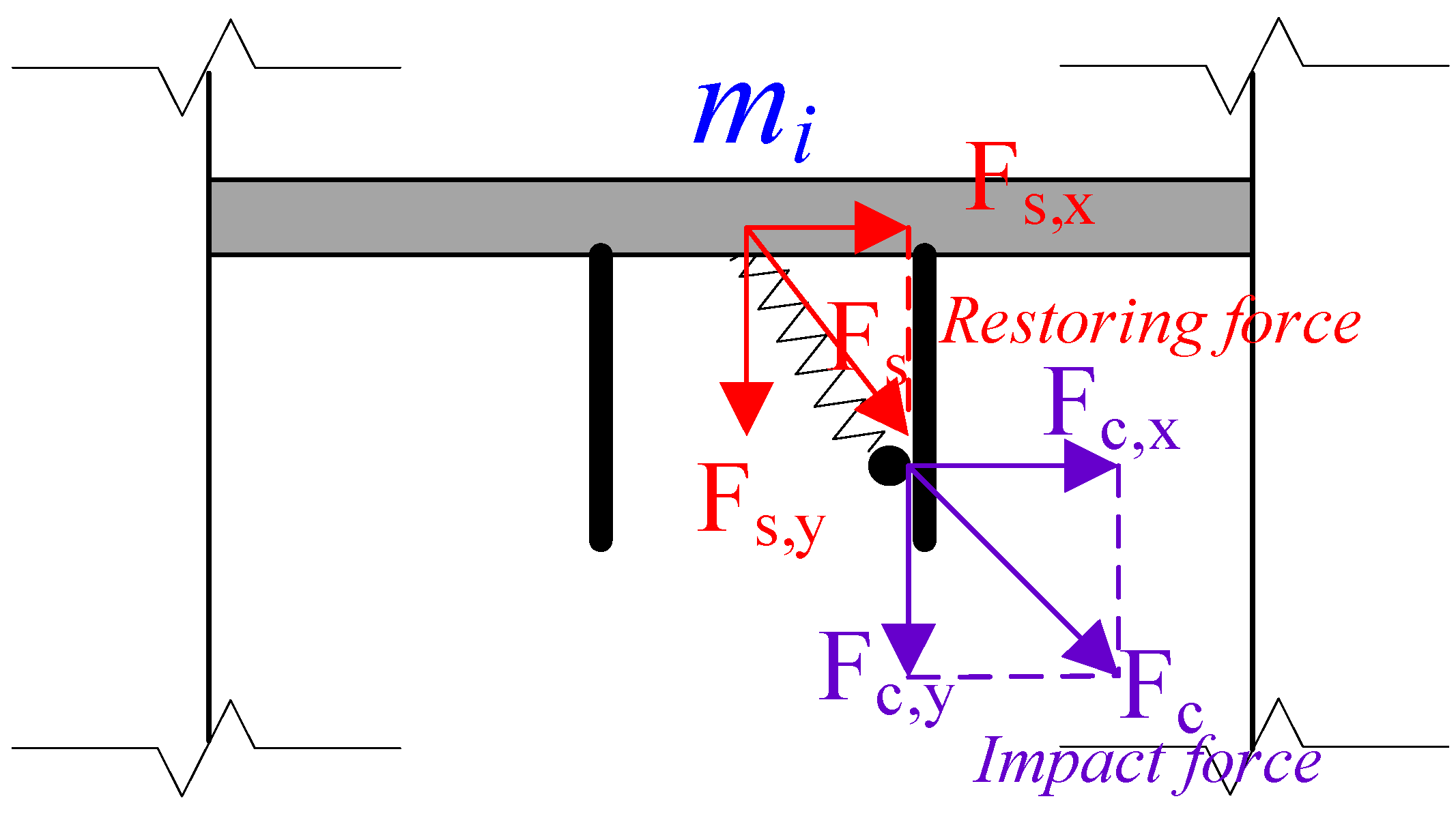
2.3. Mechanism of the SPPTMD
3. Numerical Model of the Structure-SPPTMD System
4. Case Study
5. Parametric Study
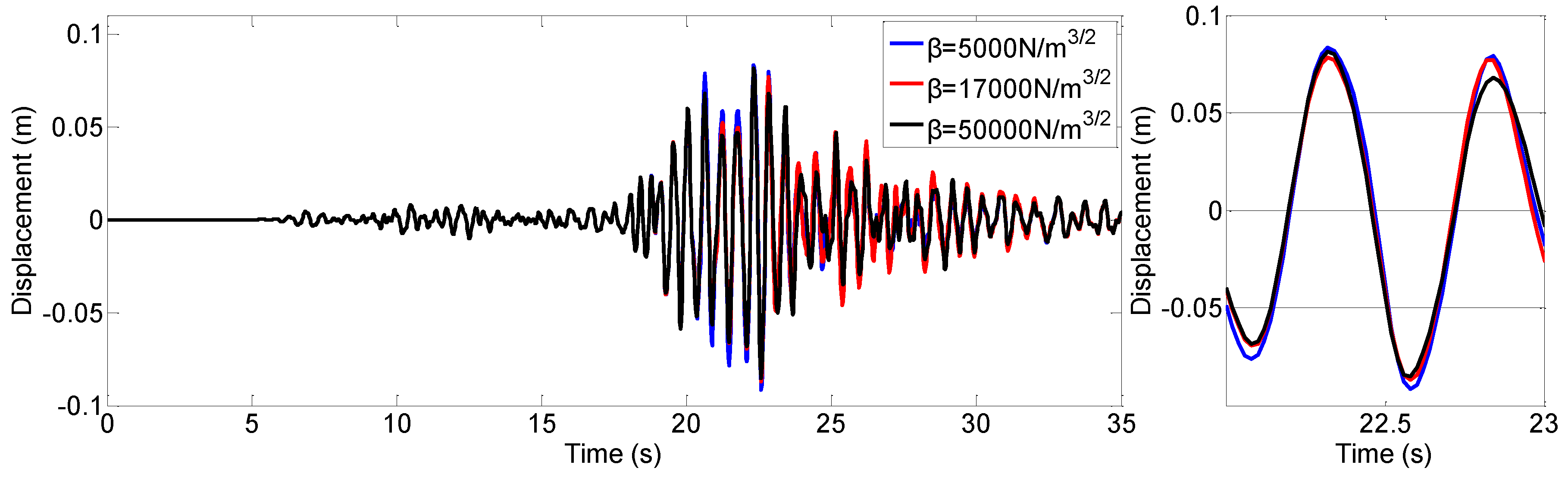
5.1. Pounding Stiffness
5.2. Mass Ratio
5.3. Gap
5.4. Damping Ratio of the Structure
6. Conclusions
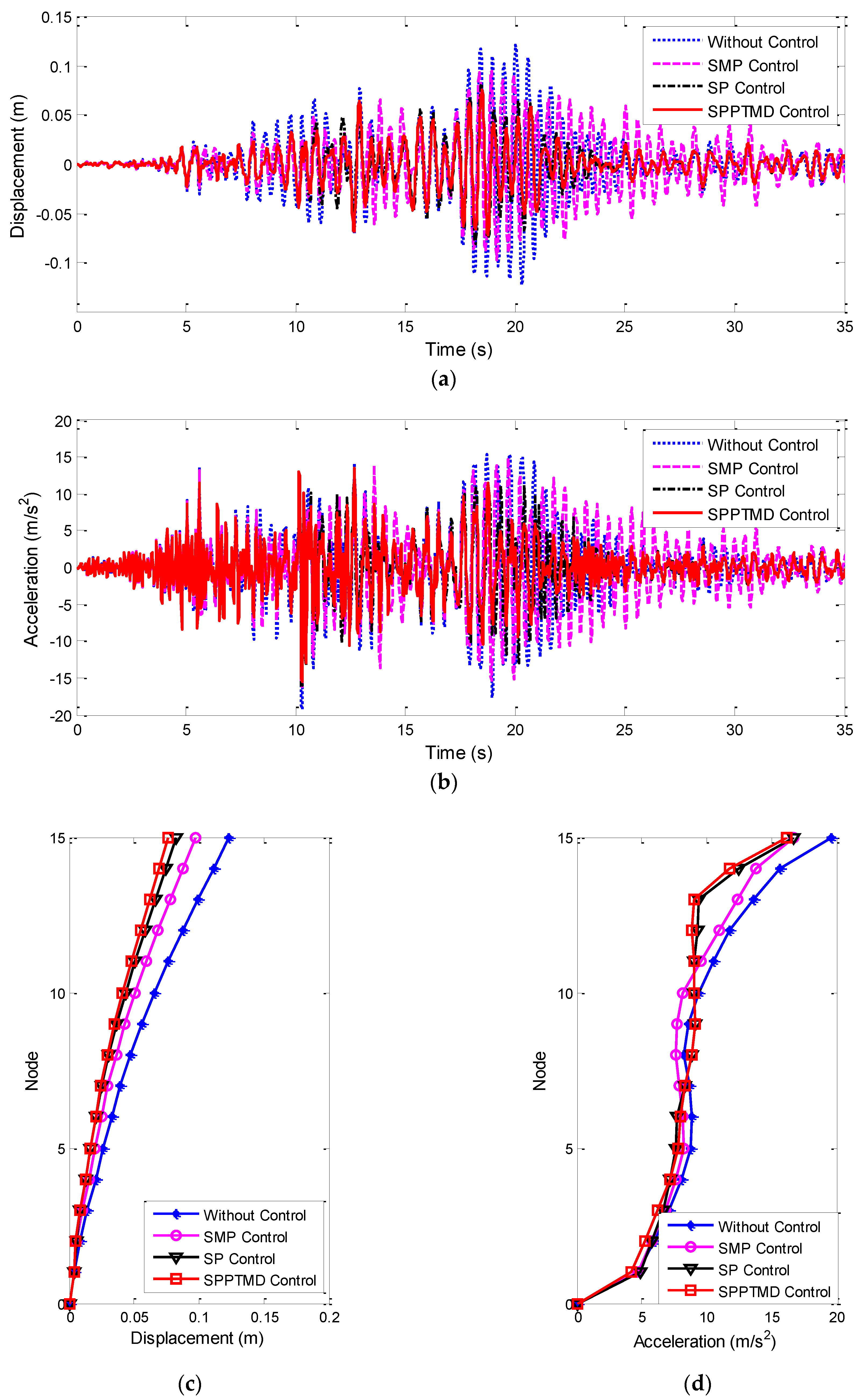
- Vibration control performance of the proposed SPPTMD is slightly improved compared with the SP and SMP. The maximum displacements of the tower are reduced by SMP, SP and SPPTMD by 19.5%, 27.9% and 37.5%, respectively. For the RMS value of the displacement, reduction ratios are 12.3%, 39.4% and 45.2%, also demonstrating the superiority of the SPPTMD.
- Vibration reduction ratio of the relative displacement is larger than that of the acceleration. The reduction ratio of the peak value and RMS value of the displacement is 37.5% and 45.2%, respectively. However, reduction ratio of the peak acceleration and RMS acceleration is only 22.8% and 41.3%.
- In the parametric study, the pounding stiffness has little influence on the damping effect. When the pounding stiffness is increased by 10 times, the displacement vibration reduction ratio at the maximum pounding stiffness is only 6.9% higher than that of the minimum pounding stiffness.
- Larger vibration reduction ratio can be achieved by increasing the mass ratio of the SPPTMD. This is similar to the classical TMD or PTMD.
- The damping effectiveness is influenced by the gap. The optimal gap is determined by the mass ratio. When the mass ratio increases from 1.5% to 3%, the maximum displacement reduction ratio increases from 31.88% to 60.57% and the optimal gap decreases from 8 cm to 4 cm.
- Damping ratio of the primary structure also influences the vibration reduction ratio of the SPPTMD. As the structural damping ratio increased from 0.5% to 5%, the reduction ratio of displacement drops from 51.7% to 32.4%.
Author Contributions
Funding
Conflicts of Interest
References
- Shinozuka, M. The Hanshin-Awaji earthquake of January 17, 1995 performance of lifelines. In Technical Report NCEER; US National Center for Earthquake Engineering Research (NCEER): Buffalo, NY, USA, 1995; Volume 95. [Google Scholar]
- Chou, J.-S.; Tu, W.-T. Failure analysis and risk management of a collapsed large wind turbine tower. Eng. Fail. Anal. 2011, 18, 295–313. [Google Scholar] [CrossRef]
- Repetto, M.P.; Solari, G. Wind-induced fatigue collapse of real slender structures. Eng. Struct. 2010, 32, 3888–3898. [Google Scholar] [CrossRef]
- Abdo, T.M.; Huzayyin, A.A.; Abdallah, A.A.; Adly, A.A. Characteristics and Analysis of an Eddy Current Shock Absorber Damper Using Finite Element Analysis. Actuators 2019, 8, 77. [Google Scholar] [CrossRef]
- Ao, W.K.; Reynolds, P. Evaluation of eddy current damper for vibration control of a frame structure. J. Phys. Commun. 2019, 3, 055013. [Google Scholar] [CrossRef]
- Ao, W.K.; Reynolds, P. Analytical and experimental study of eddy current damper for vibration suppression in a footbridge structure. In Dynamics of Civil Structures; Springer: Berlin/Heidelberg, Germany, 2017; Volume 2, pp. 131–138. [Google Scholar]
- Ao, W.K.; Reynolds, P. Optimal Analysis, Design and Testing of an Electromagnetic Damper with Resonantshunt Circuit for Vibration Control of a Civil Structure. In Proceedings of the 23rd International Congress of Sound and Vibration, Athens, Greece, 10–14 July 2016. [Google Scholar]
- Ao, W.K.; Reynolds, P. Analysis of H∞ and H2 Optimal Design Scheme for an Electromagnetic Damper with Shunt Resonant Circuit. In Shock & Vibration, Aircraft/Aerospace, and Energy Harvesting; Springer: Berlin/Heidelberg, Germany, 2015; Volume 9, pp. 201–212. [Google Scholar]
- Nyawako, D.S.; Reynolds, P. LQR controller for an in-service floor. In Dynamics of Civil Structures; Springer: Berlin/Heidelberg, Germany, 2011; Volume 4, pp. 227–237. [Google Scholar]
- Puma-Araujo, S.D.; Olvera-Trejo, D.; Martínez-Romero, O.; Urbikain, G.; Elías-Zúñiga, A.; Lacalle, L.N.L.D. Semi-Active Magnetorheological Damper Device for Chatter Mitigation during Milling of Thin-Floor Components. Appl. Sci. 2020, 10, 5313. [Google Scholar] [CrossRef]
- Kim, J.; Park, C.-S.; Min, K.-W. Fast vision-based wave height measurement for dynamic characterization of tuned liquid column dampers. Measurement 2016, 89, 189–196. [Google Scholar] [CrossRef]
- Gnanasambandham, C.; Fleissner, F.; Eberhard, P. Enhancing the dissipative properties of particle dampers using rigid obstacle-grids. J. Sound Vib. 2020, 484, 115522. [Google Scholar] [CrossRef]
- Lu, Z.; Liao, Y.; Huang, Z. Stochastic response control of particle dampers under random seismic excitation. J. Sound Vib. 2020, 481, 115439. [Google Scholar] [CrossRef]
- Tabatabai, H.; Mehrabi, A.B. TMD-Damped Stay Cable and Method and TMD. Google Patents US6292967B1, 25 September 2001. [Google Scholar]
- Battista, R.C.; Rodrigues, R.S.; Pfeil, M.S.; Aerodynamics, I. Dynamic behavior and stability of transmission line towers under wind forces. J. Wind Eng. 2003, 91, 1051–1067. [Google Scholar] [CrossRef]
- He, Y.; Lou, W.; Sun, B. Wind-induced vibration control of long span transmission tower with suspended mass pendulums. J. Zhejiang Univ. Eng. Sci. 2005, 39, 1891. [Google Scholar]
- Li, G.; Li, H.-N. Experimental study and application of metallic yielding–friction damper. J. Earthq. Tsunami 2013, 7, 1350012. [Google Scholar] [CrossRef]
- Batou, A.; Adhikari, S. Optimal parameters of viscoelastic tuned-mass dampers. J. Sound Vib. 2019, 445, 17–28. [Google Scholar] [CrossRef]
- Xu, Z.-S. Structure design, mathematical modeling and dynamical performance tests of a new viscoelastic elastomer damper. Measurement 2020, 108820. [Google Scholar] [CrossRef]
- Weber, F.; Boston, C.; Maślanka, M. An adaptive tuned mass damper based on the emulation of positive and negative stiffness with an MR damper. Smart Mater. Struct. 2010, 20, 015012. [Google Scholar] [CrossRef]
- Weber, F.; Maślanka, M. Frequency and damping adaptation of a TMD with controlled MR damper. Smart Mater. Struct. 2012, 21, 055011. [Google Scholar] [CrossRef]
- Bonello, P.; Brennan, M.J.; Elliott, S.J. Vibration control using an adaptive tuned vibration absorber with a variable curvature stiffness element. Smart Mater. Struct. 2005, 14, 1055. [Google Scholar] [CrossRef]
- Gsell, D.; Feltrin, G.; Motavalli, M. Adaptive tuned mass damper based on pre-stressable leaf-springs. J. Intell. Mater. Syst. Struct. 2007, 18, 845–851. [Google Scholar] [CrossRef]
- Heuss, O.; Salloum, R.; Mayer, D.; Melz, T. Tuning of a vibration absorber with shunted piezoelectric transducers. Arch. Appl. Mech. 2016, 86, 1715–1732. [Google Scholar] [CrossRef]
- Rustighi, E.; Brennan, M.; Mace, B. A shape memory alloy adaptive tuned vibration absorber: Design and implementation. Smart Mater. Struct. 2004, 14, 19. [Google Scholar] [CrossRef]
- Berardengo, M.; Della Porta, G.E.; Manzoni, S.; Vanali, M. A multi-modal adaptive tuned mass damper based on shape memory alloys. J. Intell. Mater. Syst. Struct. 2019, 30, 536–555. [Google Scholar] [CrossRef]
- Savi, M.A.; De Paula, A.S.; Lagoudas, D.C. Numerical investigation of an adaptive vibration absorber using shape memory alloys. J. Intell. Mater. Syst. Struct. 2011, 22, 67–80. [Google Scholar] [CrossRef]
- Tiwari, N.D.; Gogoi, A.; Hazra, B.; Wang, Q. A shape memory alloy-tuned mass damper inerter system for passive control of linked-SDOF structural systems under seismic excitation. J. Sound Vib. 2021, 494, 115893. [Google Scholar] [CrossRef]
- Tian, L.; Zhou, M.; Qiu, C.; Pan, H.; Rong, K. Seismic response control of transmission tower-line system using SMA-based TMD. Struct. Eng. Mech. 2020, 74, 129–143. [Google Scholar]
- Salvi, J.; Rizzi, E. Optimum tuning of Tuned Mass Dampers for frame structures under earthquake excitation. Struct. Control Health Monit. 2015, 22, 707–725. [Google Scholar] [CrossRef]
- Chen, J.; Lu, G.; Li, Y.; Wang, T.; Wang, W.; Song, G. Experimental study on robustness of an eddy current-tuned mass damper. Appl. Sci. 2017, 7, 895. [Google Scholar] [CrossRef]
- Elias, S.; Matsagar, V.; Datta, T.K. Along-wind response control of chimneys with distributed multiple tuned mass dampers. Struct. Control Health Monit. 2019, 26, e2275. [Google Scholar] [CrossRef]
- Zuo, L. Effective and robust vibration control using series multiple tuned-mass dampers. J. Vib. Acoust. 2009, 131, 031003. [Google Scholar] [CrossRef]
- Asami, T. Optimal design of double-mass dynamic vibration absorbers arranged in series or in parallel. J. Vib. Acoust. 2017, 139, 011015. [Google Scholar] [CrossRef]
- Asami, T.; Mizukawa, Y.; Ise, T. Optimal design of double-mass dynamic vibration absorbers minimizing the mobility transfer function. J. Vib. Acoust. 2018, 140, 061012. [Google Scholar] [CrossRef]
- Berardengo, M.; Høgsberg, J.; Manzoni, S.; Vanali, M.; Brandt, A.; Godi, T. LRLC-shunted piezoelectric vibration absorber. J. Sound Vib. 2020, 474, 115268. [Google Scholar] [CrossRef]
- Du, D.; Gu, X.; Chu, D.; Hua, H. Performance and parametric study of infinite-multiple TMDs for structures under ground acceleration by H∞ optimization. J. Sound Vib. 2007, 305, 843–853. [Google Scholar] [CrossRef]
- Li, H.-N.; Ni, X.-L. Optimization of non-uniformly distributed multiple tuned mass damper. J. Sound Vib. 2007, 308, 80–97. [Google Scholar] [CrossRef]
- Li, H.-N.; Liu, M.-M.; Fu, X. An innovative re-centering SMA-lead damper and its application to steel frame structures. Smart Mater. Struct. 2018, 27, 075029. [Google Scholar] [CrossRef]
- Li, K.; Darby, A.P. A buffered impact damper for multi-degree-of-freedom structural control. Earthq. Eng. Struct. Dyn. 2008, 37, 1491–1510. [Google Scholar] [CrossRef]
- Jiang, X.; McFarland, D.M.; Bergman, L.A.; Vakakis, A.F. Steady state passive nonlinear energy pumping in coupled oscillators: Theoretical and experimental results. Nonlinear Dyn. 2003, 33, 87–102. [Google Scholar] [CrossRef]
- Masri, S. Theory of the dynamic vibration neutralizer with motion-limiting stops. J. Appl. Mech. 1972, 39, 563–568. [Google Scholar] [CrossRef]
- Masri, S.F.; Caffrey, J.P. Response of Pounding Dynamic Vibration Neutralizer Under Harmonic and Random Excitation. J. Appl. Mech. 2019, 86, 021003. [Google Scholar] [CrossRef]
- Zhang, P.; Li, L.; Patil, D.; Singla, M.; Li, H.; Mo, Y.; Song, G. Parametric study of pounding tuned mass damper for subsea jumpers. Smart Mater. Struct. 2015, 25, 015028. [Google Scholar] [CrossRef]
- Zhang, P.; Ren, L.; Li, H.; Jia, Z.; Jiang, T. Control of wind-induced vibration of transmission tower-line system by using a spring pendulum. Math. Probl. Eng. 2015. [Google Scholar] [CrossRef]
- Carpineto, N.; Lacarbonara, W.; Vestroni, F. Hysteretic tuned mass dampers for structural vibration mitigation. J. Sound Vib. 2014, 333, 1302–1318. [Google Scholar] [CrossRef]
- Li, K.; Darby, A. An experimental investigation into the use of a buffered impact damper. J. Sound Vib. 2006, 291, 844–860. [Google Scholar] [CrossRef]
- Li, K.; Darby, A. Experiments on the effect of an impact damper on a multiple-degree-of-freedom system. J. Vib. Control 2006, 12, 445–464. [Google Scholar] [CrossRef]
- Li, H.; Zhang, P.; Song, G.; Patil, D.; Mo, Y. Robustness study of the pounding tuned mass damper for vibration control of subsea jumpers. Smart Mater. Struct. 2015, 24, 095001. [Google Scholar] [CrossRef]
- Zhang, P.; Song, G.; Li, H.-N.; Lin, Y.-X. Seismic control of power transmission tower using pounding TMD. J. Eng. Mech. 2012, 139, 1395–1406. [Google Scholar] [CrossRef]
- Lin, W.; Wang, Q.; Li, J.; Chen, S.; Qi, A. Shaking table test of pounding tuned mass damper (PTMD) on a frame structure under earthquake excitation. Comput. Concr. 2017, 20, 545–553. [Google Scholar]
- Zhao, N.; Lu, C.; Chen, M.; Luo, N.; Liu, C. Parametric Study of Pounding Tuned Mass Damper Based on Experiment of Vibration Control of a Traffic Signal Structure. J. Aerosp. Eng. 2018, 31, 04018108. [Google Scholar] [CrossRef]
- Yin, X.; Song, G.; Liu, Y. Vibration suppression of wind/traffic/bridge coupled system using multiple pounding tuned mass dampers (MPTMD). Sensors 2019, 19, 1133. [Google Scholar] [CrossRef]
- Yin, X.; Liu, Y.; Song, G.; Mo, Y. Suppression of bridge vibration induced by moving vehicles using pounding tuned mass dampers. J. Bridge Eng. 2018, 23, 04018047. [Google Scholar] [CrossRef]
- Wang, W.; Wang, X.; Hua, X.; Song, G.; Chen, Z. Vibration control of vortex-induced vibrations of a bridge deck by a single-side pounding tuned mass damper. Eng. Struct. 2018, 173, 61–75. [Google Scholar] [CrossRef]
- Song, G.; Zhang, P.; Li, L.; Singla, M.; Patil, D.; Li, H.; Mo, Y. Vibration control of a pipeline structure using pounding tuned mass damper. J. Eng. Mech. 2016, 142, 04016031. [Google Scholar] [CrossRef]
- Jiang, J.; Zhang, P.; Patil, D.; Li, H.N.; Song, G. Experimental studies on the effectiveness and robustness of a pounding tuned mass damper for vibration suppression of a submerged cylindrical pipe. Struct. Control Health Monit. 2017, 24, e2027. [Google Scholar] [CrossRef]
- Tan, J.; Ho, M.; Chun, S.; Zhang, P.; Jiang, J. Experimental Study on Vibration Control of Suspended Piping System by Single-Sided Pounding Tuned Mass Damper. Appl. Sci. 2019, 9, 285. [Google Scholar] [CrossRef]
- Li, S.; Sun, L.; Kong, F. Vibration Control Performance Analysis and Shake-Table Test of a Pounding Tuned Rotary Mass Damper under the Earthquake. Shock. Vib. 2019, 2019, 1–14. [Google Scholar] [CrossRef]
- Liu, M.; Yang, W.; Chen, W.; Li, H. Experimental investigation on multi-mode vortex-induced vibration control of stay cable installed with pounding tuned mass dampers. Smart Struct. Syst. 2019, 23, 579–587. [Google Scholar]
- Tan, J.; Jiang, J.; Liu, M.; Feng, Q.; Zhang, P.; Ho, S.C.M. Implementation of Shape Memory Alloy Sponge as Energy Dissipating Material on Pounding Tuned Mass Damper: An Experimental Investigation. Appl. Sci. 2019, 9, 1079. [Google Scholar] [CrossRef]
- Wang, W.; Hua, X.; Chen, Z.; Wang, X.; Song, G. Modeling, simulation, and validation of a pendulum-pounding tuned mass damper for vibration control. Struct. Control Health Monit. 2019, 26, e2326. [Google Scholar] [CrossRef]
- Collette, F.S. A combined tuned absorber and pendulum impact damper under random excitation. J. Sound Vib. 1998, 216, 199–213. [Google Scholar] [CrossRef]
- Wang, D. Analysis of vibration energy dissipation with vibro-impact absorber. J. Mech. Eng. 2014, 50, 87–92. [Google Scholar] [CrossRef]
- Lin, W.; Lin, Y.; Song, G.; Li, J. Multiple Pounding Tuned Mass Damper (MPTMD) control on benchmark tower subjected to earthquake excitations. Earthq. Struct. 2016, 11, 1123–1141. [Google Scholar] [CrossRef]
- Lin, W.; Song, G.; Chen, S. PTMD Control on a Benchmark TV Tower under Earthquake and Wind Load Excitations. Appl. Sci. 2017, 7, 425. [Google Scholar] [CrossRef]
- Fu, X.; Li, H.N.; Li, J.X.; Zhang, P. A pounding spacer damper and its application on transmission line subjected to fluctuating wind load. Struct. Control Health Monit. 2017, 24, e1950. [Google Scholar] [CrossRef]
- Tian, L.; Rong, K.; Bi, K.; Zhang, P. A Bidirectional Pounding Tuned Mass Damper and its Application to Transmission Tower-Line Systems under Seismic Excitations. Int. J. Struct. Stab. Dyn. 2019. [Google Scholar] [CrossRef]
- Wang, W.; Hua, X.; Wang, X.; Chen, Z.; Song, G. Numerical modeling and experimental study on a novel pounding tuned mass damper. J. Vib. Control 2018, 24, 4023–4036. [Google Scholar] [CrossRef]
- Ghasemi, M.R.; Shabakhty, N.; Enferadi, M.H. Vibration control of offshore jacket platforms through shape memory alloy pounding tuned mass damper (SMA-PTMD). Ocean Eng. 2019, 191, 106348. [Google Scholar] [CrossRef]
- Yang, Z.; Xia, Q.; Liu, S. The spring pendulum under different controlled parameters. Coll. Phys. 2011, 5, 23–26+42. [Google Scholar]
- Wang, J.; Liu, H.; Yuan, D.; Xu, Z. An improved state space model for parts of nonlinear oscillation systems and its numerical method. Chin. J. Appl. Mech. 2002, 112, 116–167. [Google Scholar] [CrossRef]
- Chandra, M. Spring Pendulum: A Nonlinear Paradigm. 2018. Available online: https://ssrn.com/abstract=3306010 or http://dx.doi.org/10.2139/ssrn.3306010 (accessed on 1 March 2019).
- DL/T. Technical Code for the Design of Tower and Pole Structures of Overhead Transmission Line; China Planning Press: Beijing, China, 2012. [Google Scholar]
- Saidi, I.; Gad, E.; Wilson, J.L.; Haritos, N. Development of passive viscoelastic damper to attenuate excessive floor vibrations. Eng. Struct. 2011, 33, 3317–3328. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ID | Earthquake | Event Date | Magnitude | Station |
|---|---|---|---|---|
| EQ1 | Kobe | 16 January 1995 | 6.9 | Oka |
| EQ2 | Northridge | 17 January 1994 | 6.6 | Villa Park-Scrrano Avc |
| EQ3 | Kobe | 16 January 1995 | 6.9 | Takatori |
| Earthquake | Damper | ||||
|---|---|---|---|---|---|
| Peak (%) | RMS (%) | Peak (%) | RMS (%) | ||
| EQ1 | With SPPTMD | 43.3 | 55.0 | 15.4 | 41.9 |
| With SP | 32.9 | 48.4 | 15.3 | 34.7 | |
| With SMP | 26.7 | 24.7 | 7.7 | 14.8 | |
| EQ2 | With SPPTMD | 37.3 | 30.8 | 18.0 | 32.5 |
| With SP | 29.8 | 27.4 | 15.3 | 29.9 | |
| With SMP | 21.3 | 7.0 | 15.7 | 0.8 | |
| EQ3 | With SPPTMD | 32.0 | 49.7 | 34.9 | 49.5 |
| With SP | 20.9 | 42.4 | 25.4 | 41.6 | |
| With SMP | 10.4 | 5.2 | 14.0 | 0.02 | |
| Average | With SPPTMD | 37.5 | 45.2 | 22.8 | 41.3 |
| With SP | 27.9 | 39.4 | 18.7 | 35.4 | |
| With SMP | 19.5 | 12.3 | 12.5 | 5.2 | |
| Damping Ratio (%) | Damper | ||||
|---|---|---|---|---|---|
| Peak (%) | RMS (%) | Peak (%) | RMS (%) | ||
| 0.5 | With SPPTMD control | 51.7 | 75.4 | 30.4 | 63.3 |
| With SP control | 42.0 | 71.6 | 27.8 | 59.2 | |
| 2 | With SPPTMD control | 43.3 | 55.0 | 15.4 | 41.9 |
| With SP control | 32.9 | 48.4 | 15.3 | 34.7 | |
| 5 | With SPPTMD control | 32.4 | 40.3 | 6.8 | 24.4 |
| With SP control | 27.3 | 34.3 | 7.8 | 18.8 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Q.; Li, H.-N.; Zhang, P. Vibration Control of a High-Rise Slender Structure with a Spring Pendulum Pounding Tuned Mass Damper. Actuators 2021, 10, 44. https://doi.org/10.3390/act10030044
Wang Q, Li H-N, Zhang P. Vibration Control of a High-Rise Slender Structure with a Spring Pendulum Pounding Tuned Mass Damper. Actuators. 2021; 10(3):44. https://doi.org/10.3390/act10030044
Chicago/Turabian StyleWang, Qi, Hong-Nan Li, and Peng Zhang. 2021. "Vibration Control of a High-Rise Slender Structure with a Spring Pendulum Pounding Tuned Mass Damper" Actuators 10, no. 3: 44. https://doi.org/10.3390/act10030044
APA StyleWang, Q., Li, H.-N., & Zhang, P. (2021). Vibration Control of a High-Rise Slender Structure with a Spring Pendulum Pounding Tuned Mass Damper. Actuators, 10(3), 44. https://doi.org/10.3390/act10030044