
Fractional Control of a Lightweight Single Link Flexible Robot Robust to Strain Gauge Sensor Disturbances and Payload Changes



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- (1)
- Nonlinearities and time-varying parameters of the actuators reduce their performance: the discontinuous nonlinear Coulomb friction hinders the precise positioning of the robot tip, and the time-varying parameters as well as the actuator saturation produce overshoot and a slow response.
- (2)
- Strain gauges are often used as sensors in flexible link robots because they are cheap and measure both vibrations and deflections. However, strain gauges are prone to introduce two kinds of disturbances in the measurement: variations in temperature [4] produce a time-varying offset and electromagnetic interference produces high-frequency noise [12]. The first disturbance produces a steady-state error in the closed-loop position of the links [13]. The second disturbance may saturate the actuators, leading therefore to a bad dynamic behavior. Both disturbances dwindle the accuracy of the robot state observation (which is often needed for control) [14].
- (3)
- Robot tasks involve carrying variable payloads. Then, the control system has to be robust to these changes and must always preserve the stability, e.g., [15].
- (1)
- An inner loop was closed around the actuators which fed back the actuator position. In this manner, a servo-controlled actuator robust to the Coulomb friction nonlinearity and viscous friction variations was achieved.
- (2)
- An outer loop in charge of removing the link vibrations was achieved feeding back the measurements of some strain gauges placed at the base of the flexible link. This outer loop removed the strain gauge offset, reduced the effects of sensor high-frequency noise and allowed to perform fast trajectories of the tip of the antenna without vibrations.
- (1)
- Robotic sensing antennae are not aimed to carry payloads. Then robustness to changing payloads was not addressed in the design of these controllers. Variations in the payload of produce changes in their vibration frequencies which may prompt underdamped or unstable responses in the closed-loop control system.
- (2)
- The outer loop controller is designed using frequency techniques and, in particular, phase margin and gain crossover frequency specifications. We found that these two specifications have to be chosen carefully because they may lead to control systems with two problems: (1) closed-loop poles that are canceled by zeros, which implies that the robot is able to accurately track a trajectory without vibrating but, in turn, it is not able to damp the vibrations caused by external disturbances, even in the case that only small changes are produced in the robot state and (2) unfulfillment of the desired time specifications because direct correspondences between them and frequency specifications only exist in the case of low order simple systems.
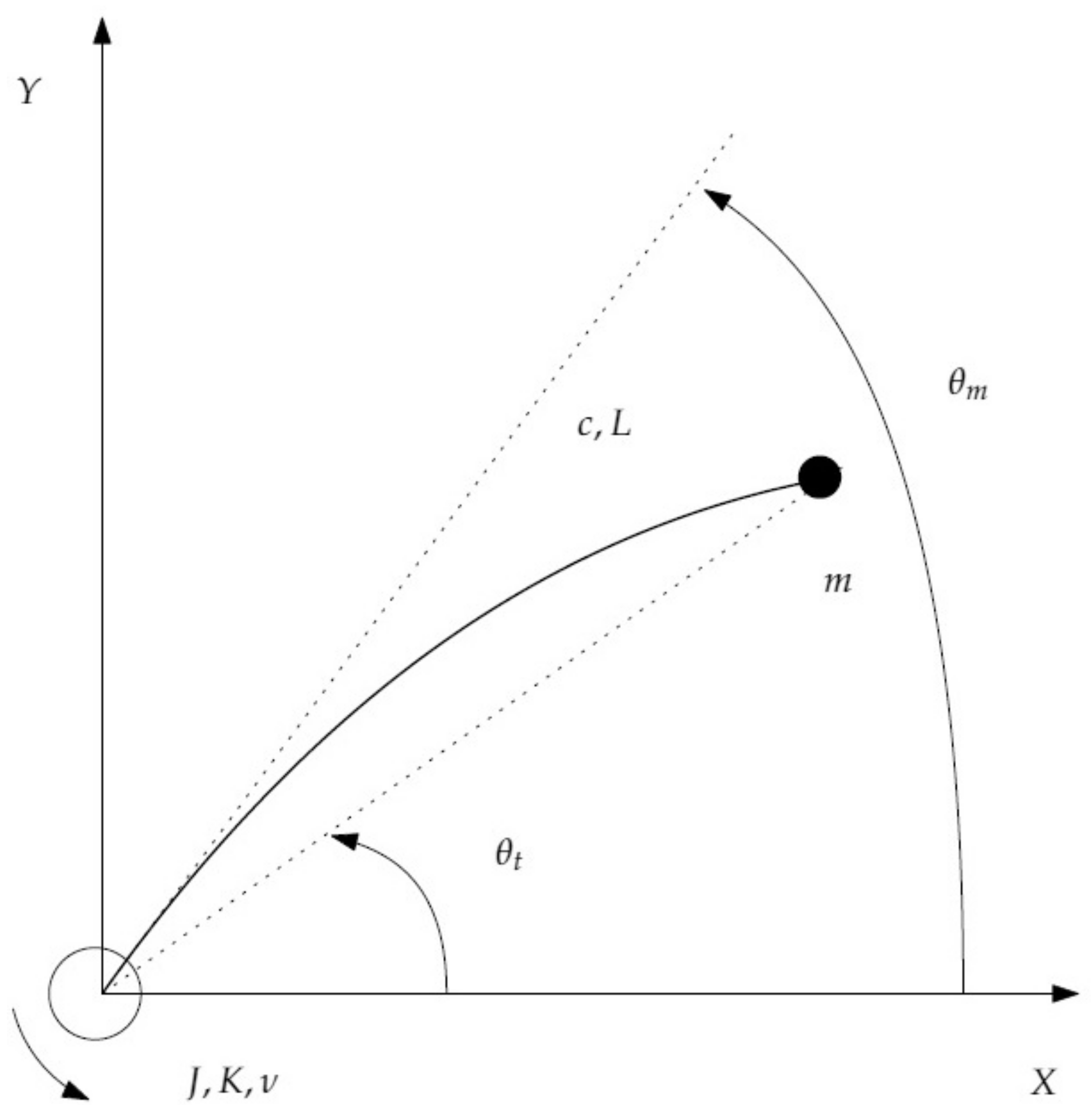
2. Robot Dynamics
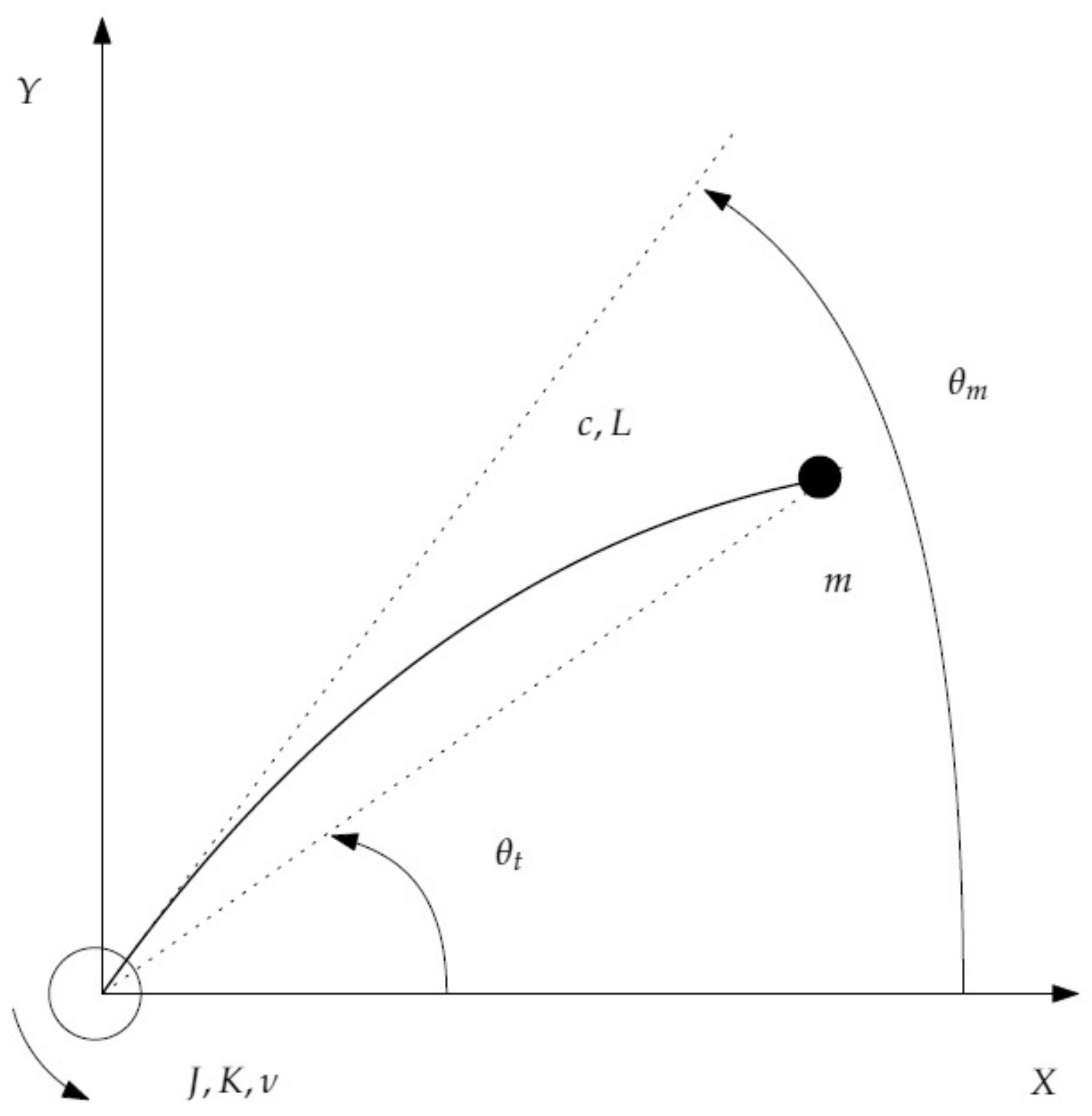
2.1. Flexible Link Dynamics
2.2. Rigid Dynamics
3. Control Scheme
3.1. General Description
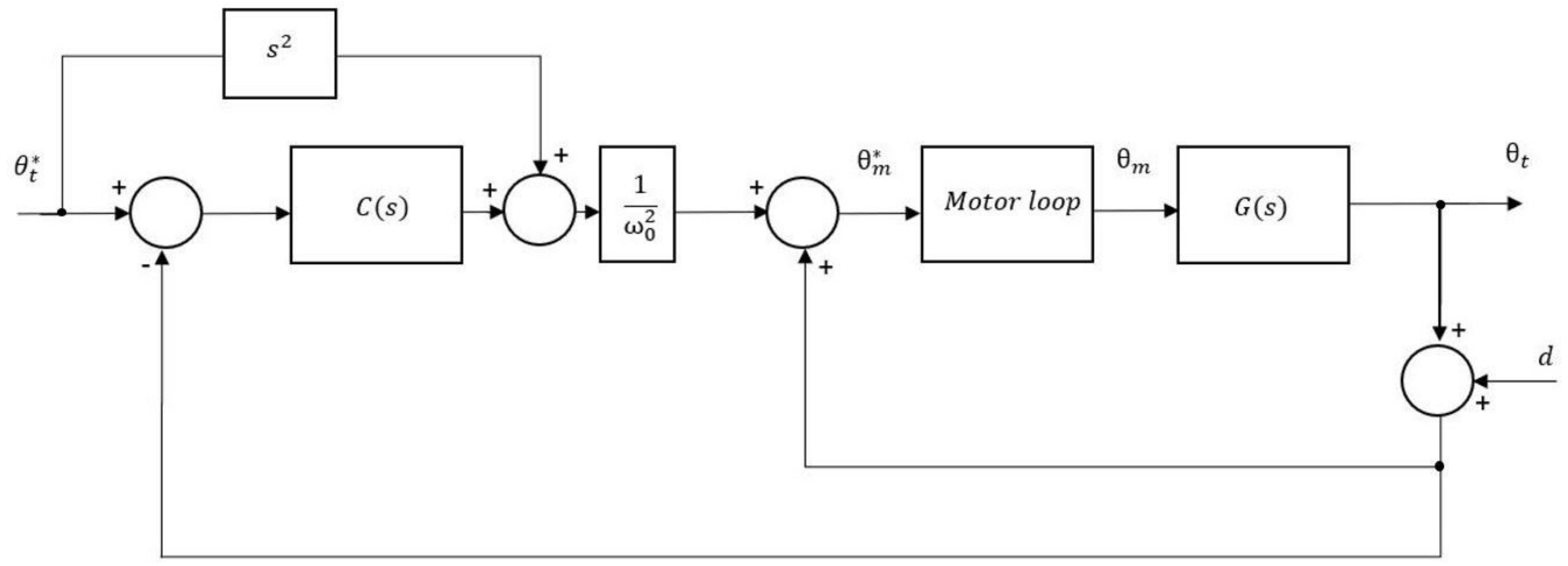
- (1)
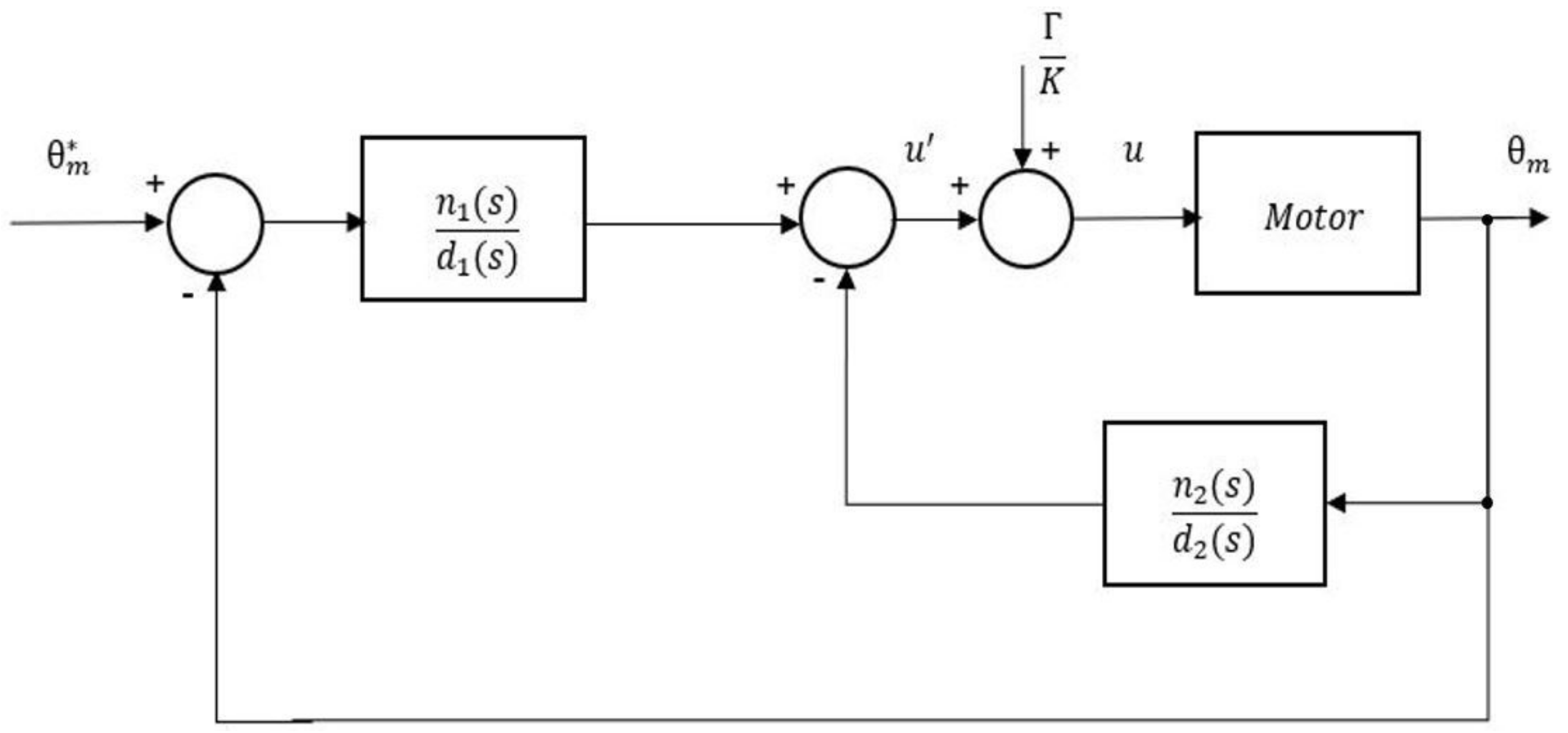
- An inner loop that feeds back the measurement of the angle of the motor. This loop almost removes the effects of the nonlinear Coulomb friction and the time-varying viscous friction. Moreover, this loop is closed using a controller with high gains so that the dynamics of the resulting servo-controlled motor is much faster than the dynamics of the flexible link.
- (2)
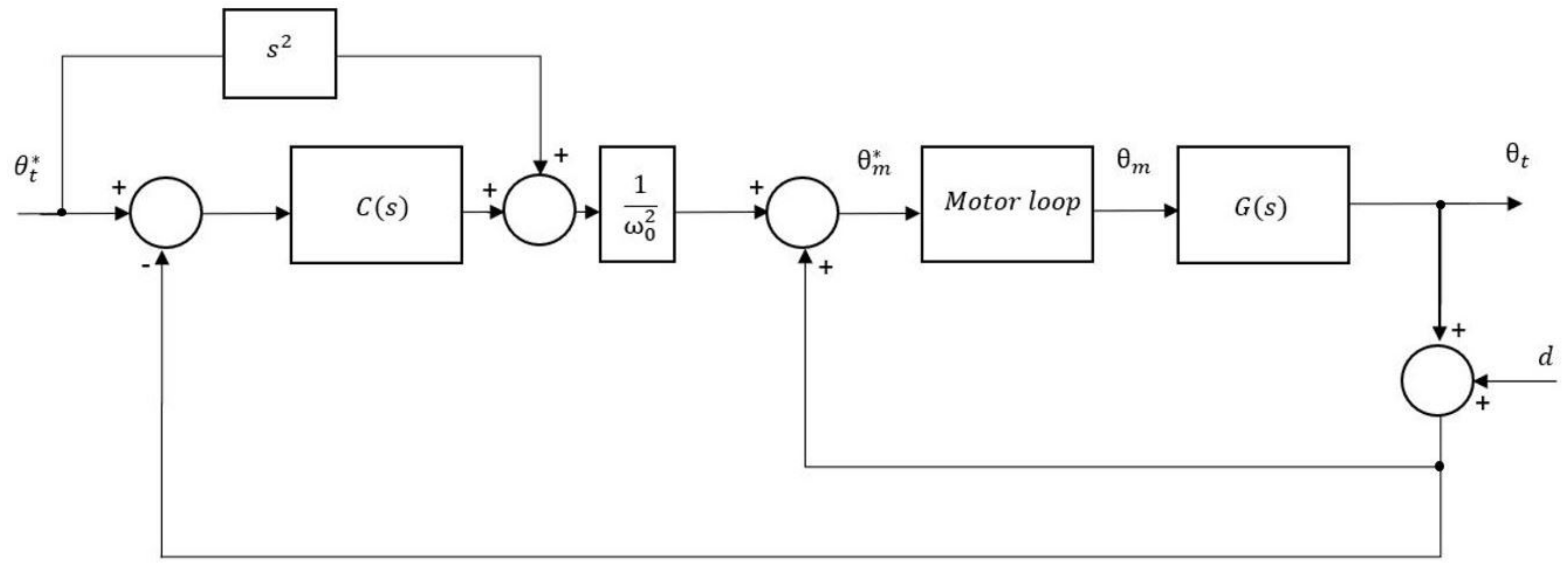
- An outer loop that is in charge of controlling the position of the payload and moving it preventing the appearance of mechanical vibrations.
3.2. Inner Loop Model
3.3. Outer Loop Model
3.4. Achieving Robustness to Strain Gauge Disturbances
3.4.1. Offset Elimination
3.4.2. Reduction of the Effect of the High Frequency Noise
4. Control Robust to Payload Changes
4.1. A Fractional-Order Controller
4.2. Dynamic Specifications
4.3. Tuning the Controller
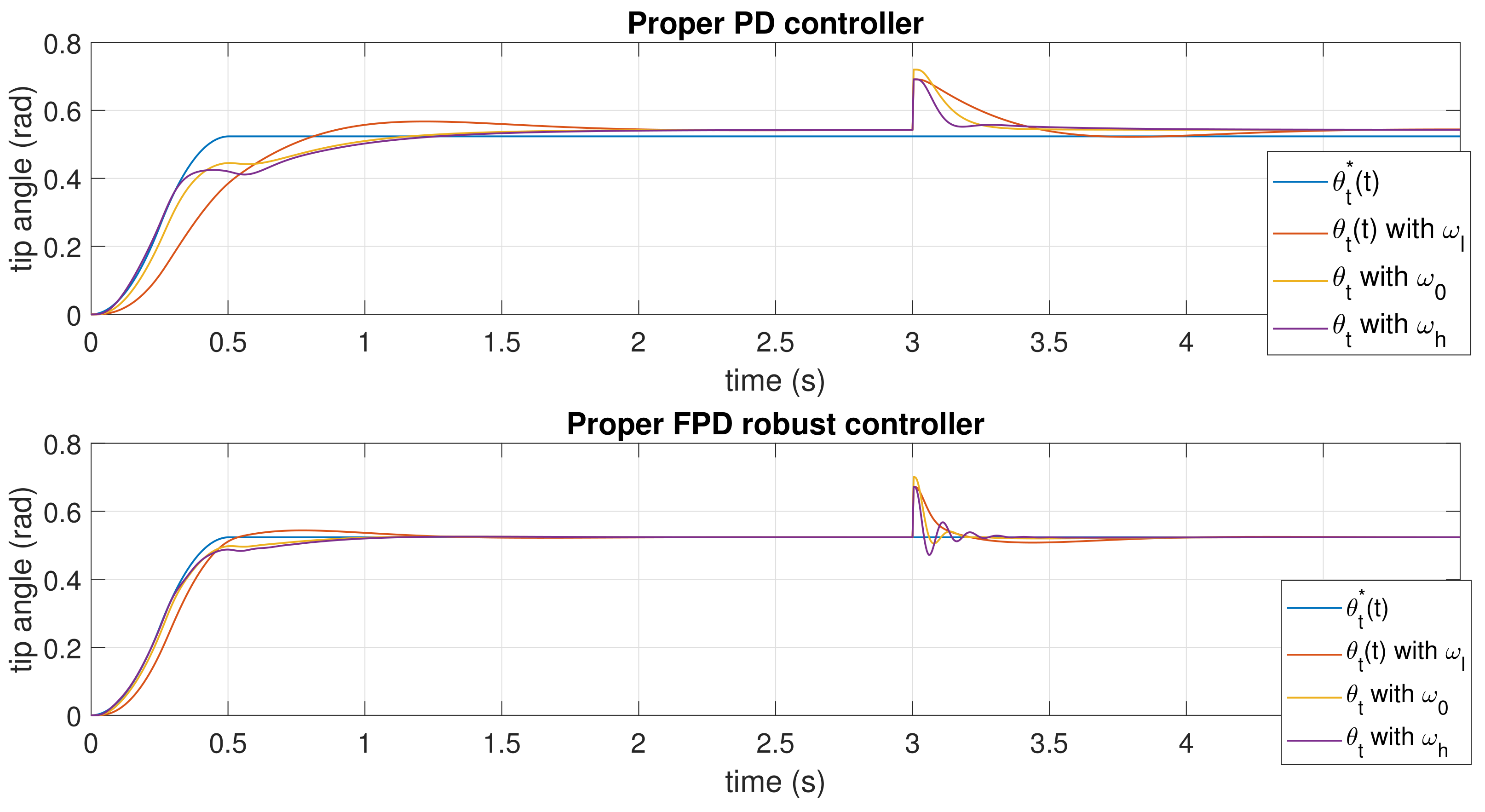
- (1)
- PD controller: . This controller has two parameters to be tuned. Then the dynamic specifications can be achieved but not the robustness to strain gauges offset nor the robustness to payload changes. In this case, (34) becomes , and substituting yields:
- (2)
- FPD controller: . This controller has three parameters to be tuned. Then the dynamic specifications can be achieved as well as the robustness to strain gauges offset. Moreover, the structure of this controller yields the iso phase margin property to changes in the payload. In this case, (34) becomes , and substituting yields:
- (3)
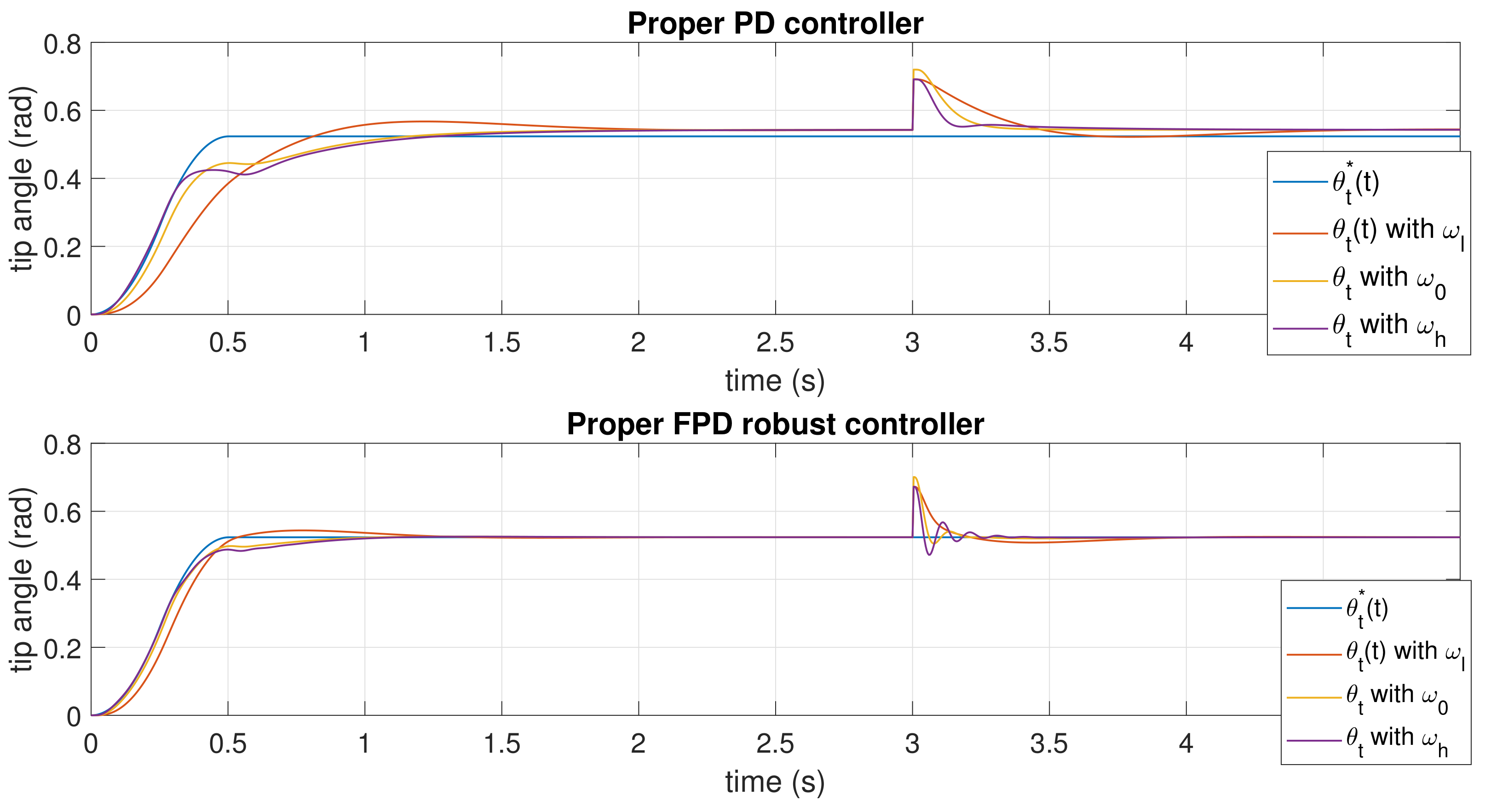
- Proper FPD controller: . This controller has four parameters to be tuned. In this case, the dynamic specifications can be achieved as well as the robustness to strain gauges offset. The structure of this controller yields an isophase margin property to payload changes which is not as good as that of the previous controller. In any case, if the gain crossover frequency of the system varies in the range as consequence of changes in the payload, choosing a value:and the same values of and as in assures that in the mentioned frequency range, and the isophase margin property becomes guaranteed for the range of variation of the payload. Since controller (30) is proper (always ), reduces the effect of the high frequency noise in the control signal . In this case, (34) becomes , and the tuning procedure is carried out in five steps:
- (a)
- Obtain controller from expression (36).
- (b)
- Calculate the range of gain crossover frequencies for the previous .
- (c)
- Choose a value of using condition (37).
- (d)
- Obtain controller using the previous value of . In this case, (34) becomes , and substituting yields:
- (e)
- Check that the gain crossover frequency range obtained with verifies condition (37). If not, a lower value of has to be chosen and the procedure has to be repeated until a satisfactory controller is found.
- (4)
- Proper PD controller: . This controller has three parameters to be tuned. It uses the same values and designed for but the derivative term is modified by adding the same filter as in the in order to attain a similar attenuation of the high-frequency noise. Since is low, the double pole introduced at has a small influence on the values of the two dominant poles and of the closed-loop system.
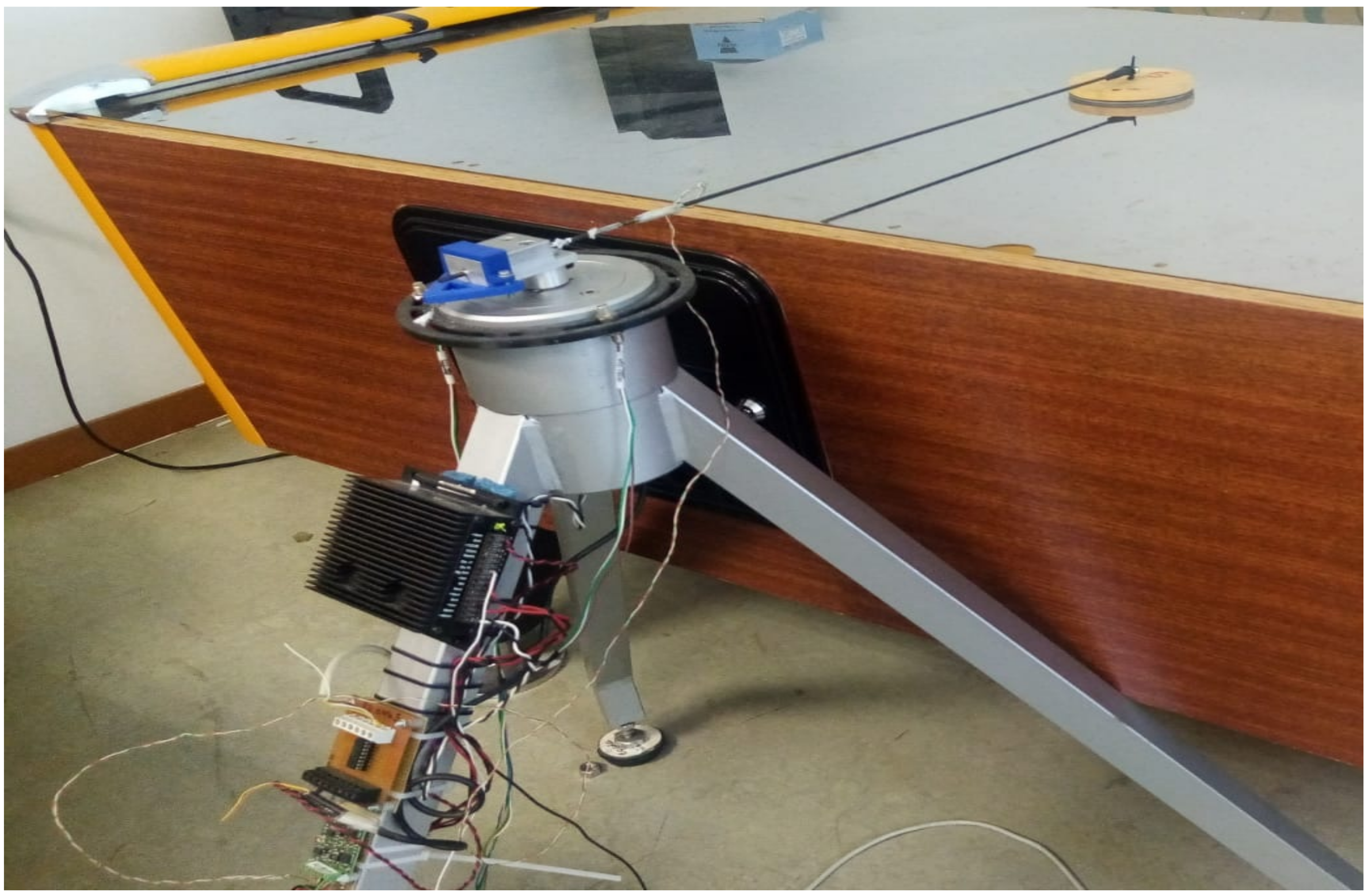
5. Experimental Platform
5.1. Setup Description
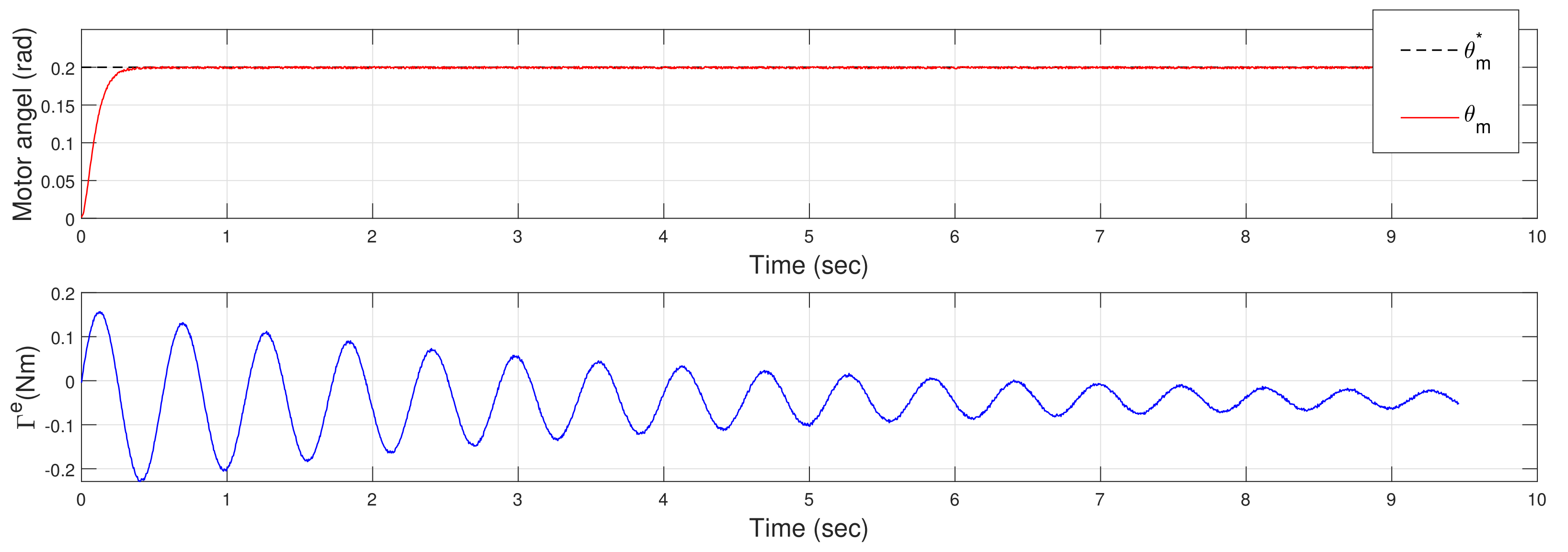
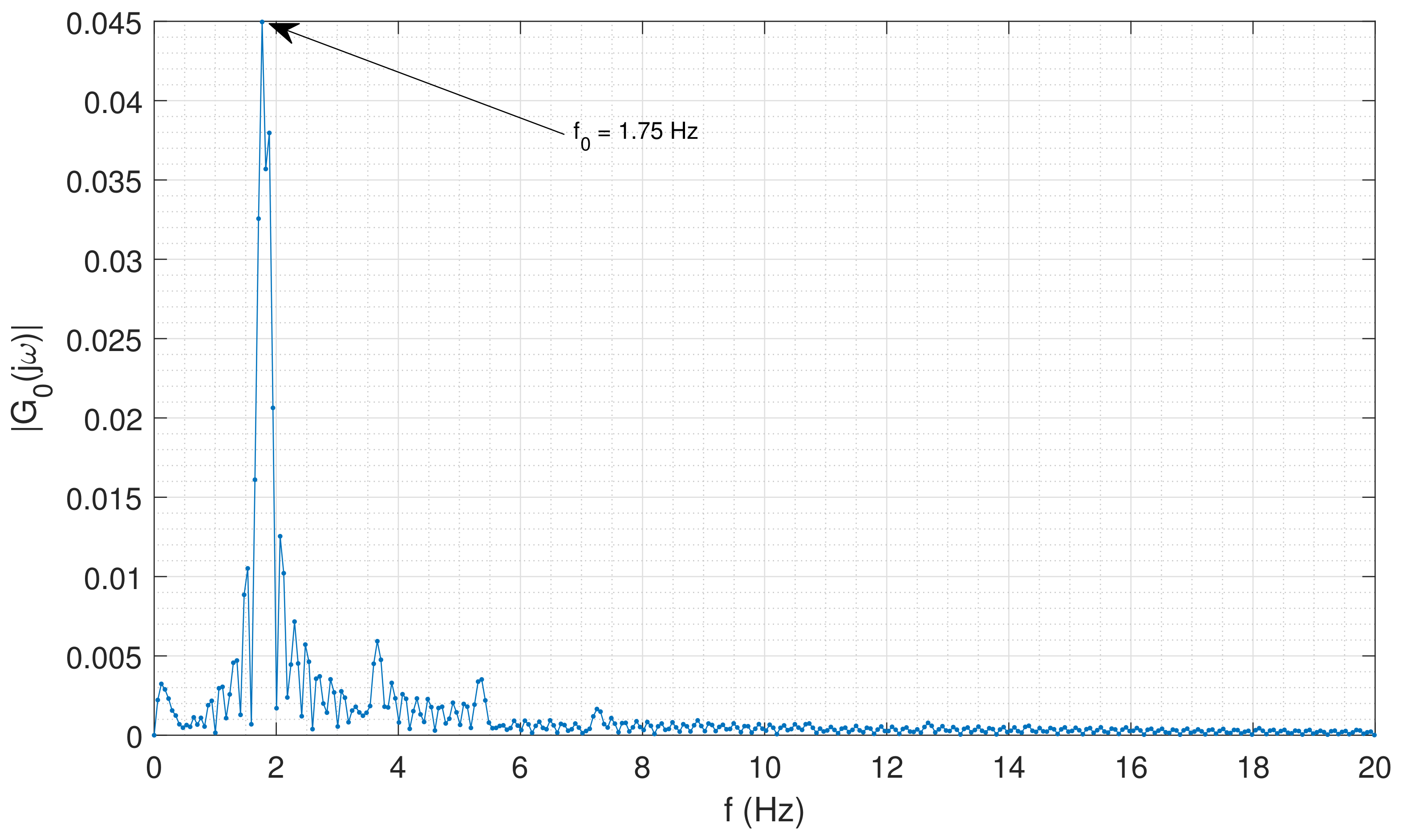
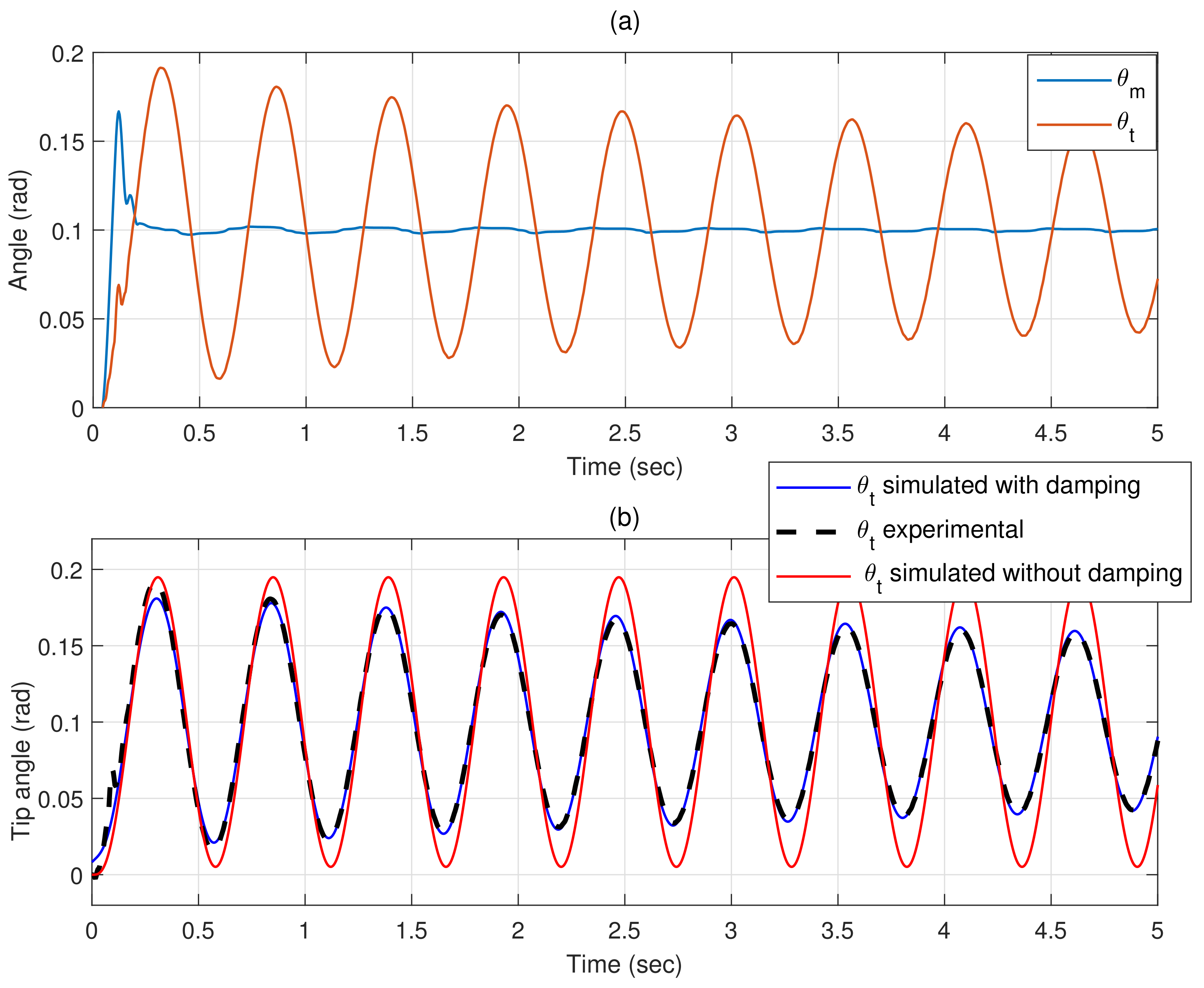
5.2. Setup Dynamics Validation
6. Control System Validation
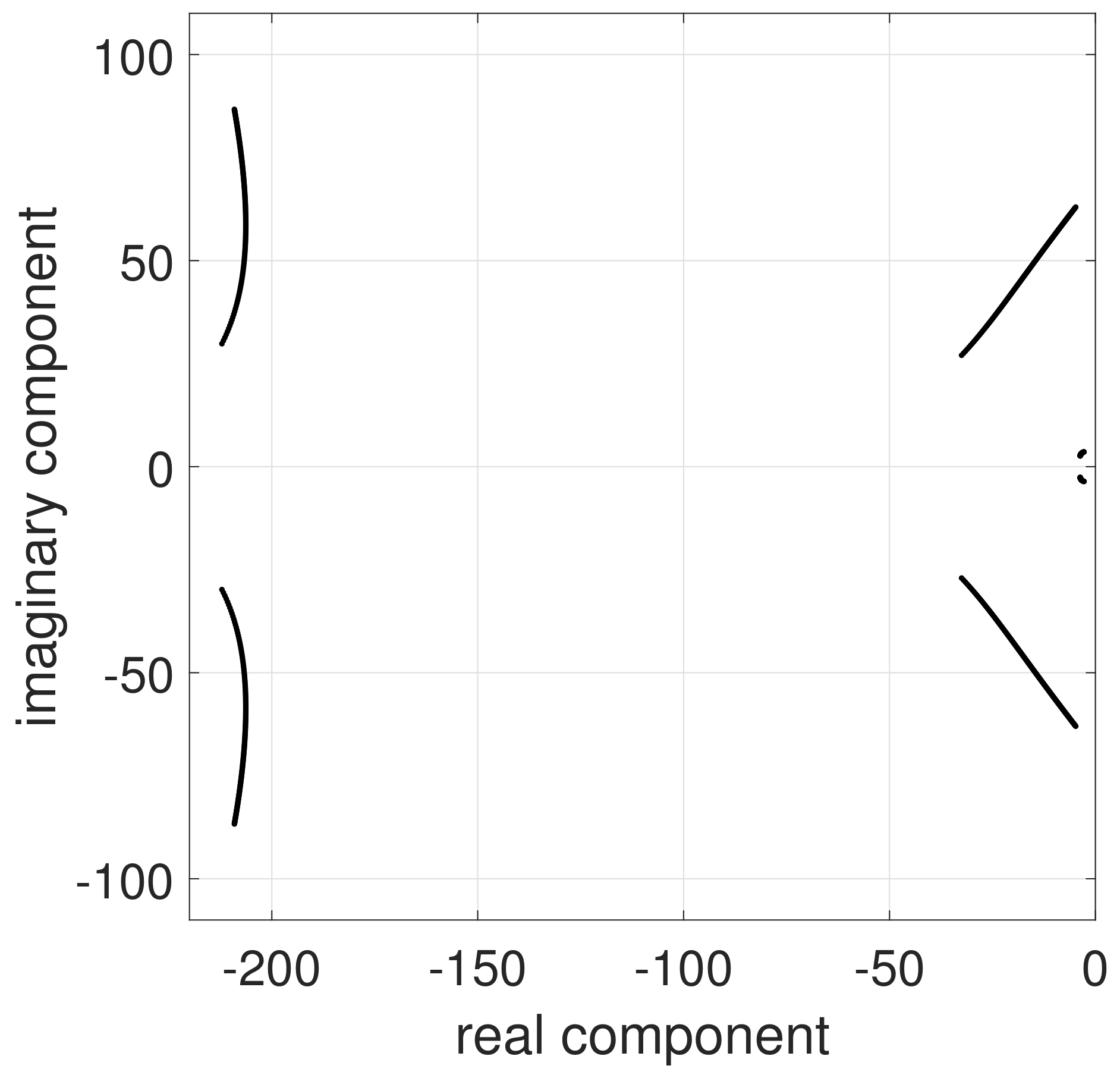
6.1. Design of the Control System
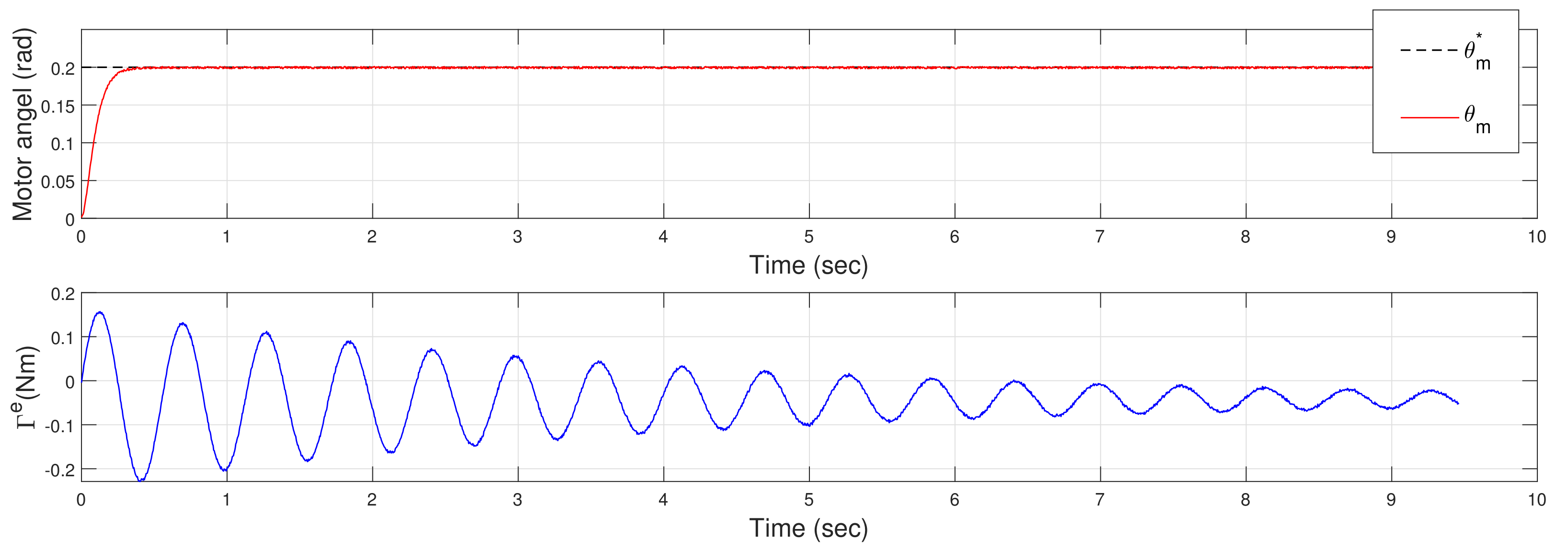
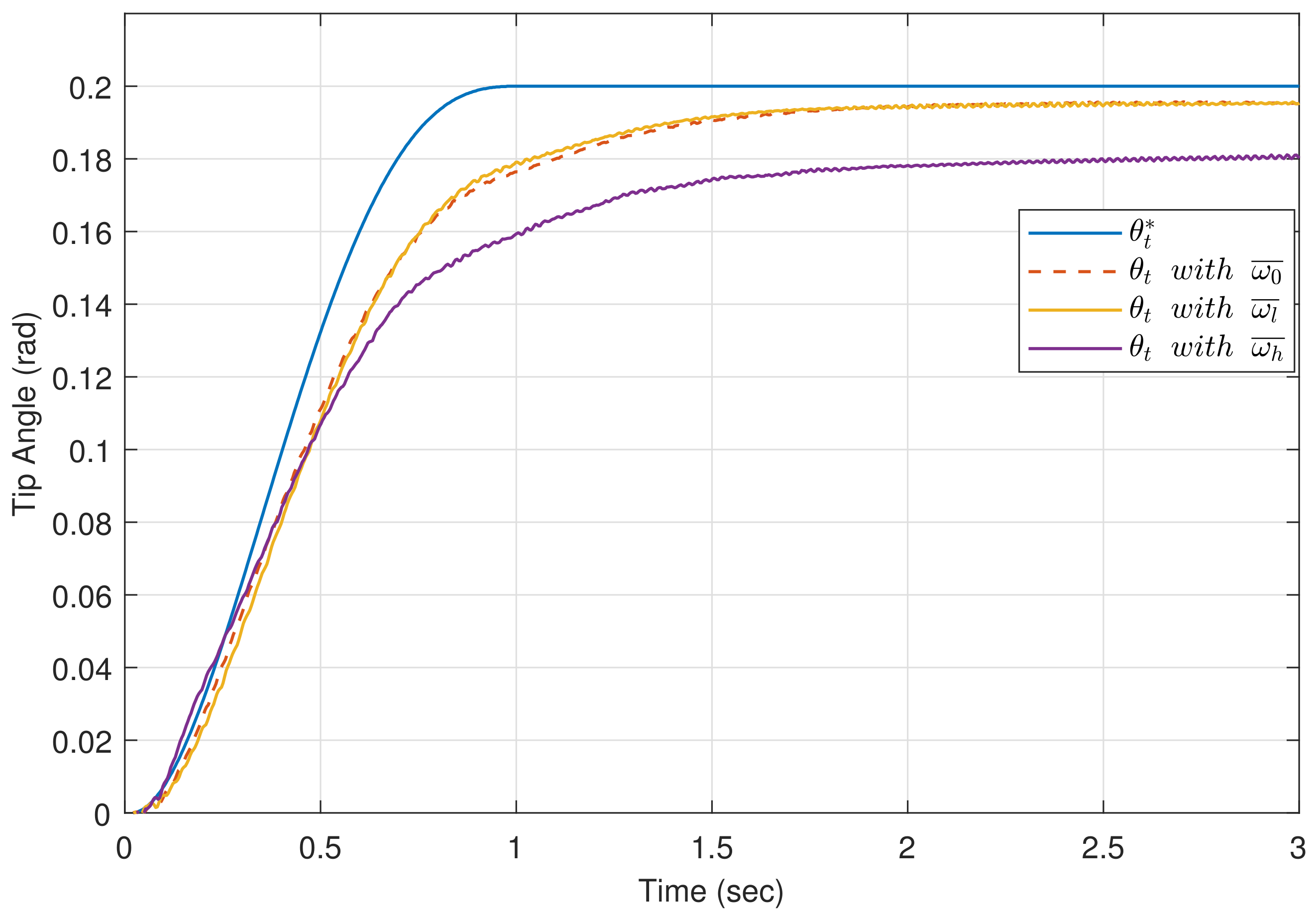
6.2. Experimental Validation of the Controller
7. Conclusions
- It is possible to remove the offset disturbance of the strain gauges of a without having to use controllers with an integral term—which would reduce the relative stability of the closed-loop system and the robustness to payload variations—nor differentiating the strain gauge signal, which would add noise to the closed-loop control and would compromise the compensation of some steady state tip position errors such as the errors brought about by the steady state deflections of multilink s caused by gravity.
- The designed controller is simpler than others and provides robustness to tip payload changes larger than other controllers. For example, our controller allows payload variations from to of its nominal value while the robust fractional controllers [25,26] cited in the Introduction allowed only changes of and , respectively, of their payload nominal values.
- Consequently, high speed motions can be achieved using a controller that can be easily designed and can be implemented in a low performance computer.
- This work prompts the design of new efficient controllers for multilink s that will show improved robustness to torque measurement offset and payload changes. These controllers will allow fast movements with enhanced tip position precision, and will be the object of our future research.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Siciliano, B.; Khatib, O. Handbook of Robotics; Springer: Berlin/Heidelberg, Germany, 2008; pp. 287–319. [Google Scholar]
- Blanc, L.; Delchambre, A.; Lambert, P. Flexible medical devices: Review of controllable stiffness solutions. Actuators 2017, 6, 23. [Google Scholar] [CrossRef] [Green Version]
- Dwivedy, S.; Eberhard, P. Dynamic analysis of flexible manipulators, a literature review. Mech. Mach. Theory 2006, 41, 749–777. [Google Scholar] [CrossRef]
- Kiang, C.T.; Spowage, A.; Yoong, C.K. Review of control and sensor system of flexible manipulator. J. Intell. Robot. Syst. 2015, 77, 187–213. [Google Scholar] [CrossRef]
- Zhou, W.; Wu, Y.; Hu, H.; Li, Y.; Wang, Y. Port-Hamiltonian modeling and IDA-PBC control of an IPMC-actuated flexible beam. Actuators 2021, 10, 236. [Google Scholar] [CrossRef]
- Ripamonti, F.; Orsini, L.; Resta, F. A nonlinear sliding surface in sliding mode control to reduce vibrations of a three-link flexible manipulator. J. Vib. Acoust. 2017, 139, 051005. [Google Scholar] [CrossRef]
- Shaheed, M.; Tokhi, O. Adaptive closed-loop control of a single-link flexible manipulator. J. Vib. Control 2013, 19, 2068–2080. [Google Scholar] [CrossRef]
- Ouyang, Y.; He, W.; Li, X. Reinforcement learning control of a single-link flexible robotic manipulator. IET Control Theory Appl. 2017, 11, 1426–1433. [Google Scholar] [CrossRef]
- Sun, C.; Gao, H.; He, W.; Yu, Y. Fuzzy neural network control of a flexible robotic manipulator using assumed mode method. IEEE Trans. Neural Netw. Learn. Syst. 2018, 29, 5214–5227. [Google Scholar] [CrossRef]
- Qiu, Z.; Zhao, Z. Vibration suppression of a pneumatic drive flexible manipulator using adaptive phase adjusting controller. J. Vib. Control 2015, 21, 2959–2980. [Google Scholar] [CrossRef]
- García-Pérez, O.; Silva-Navarro, G.P.S. Flexible-link robots with combined trajectory tracking and vibration control. Appl. Math. Model. 2019, 70, 285–298. [Google Scholar] [CrossRef]
- Dubus, G.; David, O.; Measson, Y. A vision-based method for estimating vibrations of a flexible arm using on-line sinusoidal regression. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 4068–4075. [Google Scholar]
- Dubus, G. On-line estimation of time varying capture delay for vision-based vibration control of flexible manipulators deployed in hostile environments. In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; pp. 3765–3770. [Google Scholar]
- Bascetta, L.; Rocco, P. End-point vibration sensing of planar flexible manipulators through visual servoing. Mechatronics 2006, 16, 221–232. [Google Scholar] [CrossRef]
- Feliu, V.; Castillo, F.J.; Ramos, F.; Somolinos, J.A. Robust tip trajectory tracking of a very lightweight single-link flexible arm in presence of large payload changes. Mechatronics 2012, 22, 594–613. [Google Scholar] [CrossRef]
- Feliu-Talegón, D.; Feliu-Batlle, V. A Fractional-Order Controller for Single-Link Flexible Robots Robust to Sensor Disturbances; IFAC-PapersOnLine; IFAC: New York, NY, USA, 2017; Volume 50, pp. 6043–6048. [Google Scholar]
- Feliu-Talegón, D.; Feliu-Batlle, V. Control of very lightweight 2-DOF single-link flexible robots robust to strain gauge sensor disturbances: A fractional-order approach. IEEE Trans. Control Syst. Technol. 2021, 1–16. [Google Scholar] [CrossRef]
- Khalil, H.K. Nonlinear Systems; Prentice-Hall: Upper Saddle River, NJ, USA, 2002. [Google Scholar]
- Podlubny, I. Fractional Differential Equations; Academic Press: Cambridge, MA, USA, 1999. [Google Scholar]
- Dastjerdi, A.A.; Vinagre, B.M.; Chen, Y.; HosseinNia, S.H. Linear fractional order controllers; A survey in the frequency domain. Annu. Rev. Control. 2019, 47, 51–70. [Google Scholar] [CrossRef]
- Tepljakov, A.; Alagoz, B.B.; Yeroglu, C.; Gonzalez, E.; HosseinNia, S.H.; Petlenkov, E. FOPID Controllers and Their Industrial Applications: A Survey of Recent Results; IFAC-PapersOnLine; IFAC: New York, NY, USA, 2018; Volume 51, pp. 25–30. [Google Scholar]
- Oustaloup, A.; Moreau, X.; Nouillant, M. The CRONE suspension. Control. Eng. Pract. 1996, 4, 1101–1108. [Google Scholar] [CrossRef]
- Sabatier, J.; Poullain, S.; Latteux, P.; Thomas, J.; Oustaloup, A. Robust speed control of a low damped electromechanical system based on CRONE control: Application to a four mass experimental test bench. Nonlinear Dyn. 2004, 38, 383–400. [Google Scholar] [CrossRef]
- Feliu-Batlle, V. Robust isophase margin control of oscillatory systems with large uncertainties in their parameters: A fractional-order control approach. Int. J. Robust Nonlinear Control. 2017, 27, 2145–2164. [Google Scholar] [CrossRef]
- Sharma, R.; Gaur, P.; Mittal, A. Design of two-layered fractional order fuzzy logic controllers applied to robotic manipulator with variable payload. Appl. Soft Comput. 2016, 47, 565–576. [Google Scholar] [CrossRef]
- Nejad, F.; Fayazi, A.; Zadeh, H.; Marj, H.; HosseinNia, S. Precise tip-positioning control of a single-link flexible arm using a fractional-order sliding mode controller. J. Vib. Control. 2020, 26, 1683–1696. [Google Scholar] [CrossRef]
- Feliu, V.; Rattan, K.S.; Brown, H.B. Control of flexible arms with friction in the joints. IEEE Trans. Robot. Autom. 1993, 9, 467–475. [Google Scholar] [CrossRef]
- Feliu, V.; Pereira, E.; Díaz, I.M. Passivity-based control of single-link flexible manipulators using a linear strain feedback. Mech. Mach. Theory 2014, 71, 191–208. [Google Scholar] [CrossRef]
- Feliu-Talegón, D.; Feliu-Batlle, V.; Castillo-Berrio, C. Motion control of a sensing antenna with a nonlinear input shaping technique. Rev. Iberoam. Autom. Inform. Ind. 2016, 13, 162–173. [Google Scholar] [CrossRef] [Green Version]
- Ogata, K. Modern Control Engineering; Prentice-Hall: Upper Saddle River, NJ, USA, 2010. [Google Scholar]
- Shah, P.; Agashe, S. Review of fractional PID controller. Mechatronics 2016, 38, 29–41. [Google Scholar] [CrossRef]
- Monje, C.; Calderón, A.; Vinagre, B.; Feliu, V. The fractional order lead compensator. In Proceedings of the Second IEEE International Conference on Computational Cybernetics, ICCC 2004, Vienna, Austria, 30 August–1 September 2004; pp. 347–352. [Google Scholar]
- Atangana, A. On the singular perturbations for fractional differential equation. Sci. World J. 2014, 2014, 752371. [Google Scholar] [CrossRef]
- Wardi, M.L.; Amairi, M.; Abdelkrim, M.N. Fractional PID controller design for nonlinear systems based on singular perturbation technique. Int. J. Digit. Signals Smart Syst. 2018, 2, 95–120. [Google Scholar]
- Abolvafaei1, M.; Ganjefar, S. Integer-fractional decomposition and stability analysis of fractional-order nonlinear dynamic systems using homotopy singular perturbation method. Math. Control. Signals Syst. 2020, 32, 517–542. [Google Scholar] [CrossRef]
- Erickson, R.W.; Maksimovic, D. Fundamentals of Power Electronics; Kluwer Academic: New York, NY, USA, 1956. [Google Scholar]
- Cheng, X.; Liu, H.; Lu, W. Chattering-suppressed sliding mode control for flexible-joint robot manipulators. Actuators 2021, 10, 288. [Google Scholar] [CrossRef]



Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gharab, S.; Benftima, S.; Batlle, V.F. Fractional Control of a Lightweight Single Link Flexible Robot Robust to Strain Gauge Sensor Disturbances and Payload Changes. Actuators 2021, 10, 317. https://doi.org/10.3390/act10120317
Gharab S, Benftima S, Batlle VF. Fractional Control of a Lightweight Single Link Flexible Robot Robust to Strain Gauge Sensor Disturbances and Payload Changes. Actuators. 2021; 10(12):317. https://doi.org/10.3390/act10120317
Chicago/Turabian StyleGharab, Saddam, Selma Benftima, and Vicente Feliu Batlle. 2021. "Fractional Control of a Lightweight Single Link Flexible Robot Robust to Strain Gauge Sensor Disturbances and Payload Changes" Actuators 10, no. 12: 317. https://doi.org/10.3390/act10120317
APA StyleGharab, S., Benftima, S., & Batlle, V. F. (2021). Fractional Control of a Lightweight Single Link Flexible Robot Robust to Strain Gauge Sensor Disturbances and Payload Changes. Actuators, 10(12), 317. https://doi.org/10.3390/act10120317