1. Introduction
Robot manipulators with flexible joints are widely used in industrial applications due to their light weight, reduced inertia, high speed and compact structure. Joint flexibility generated from the elastic driving (by harmonic reducers, series elastic actuators or cables, etc.) always leads to vibration problem and is unavoidable in modeling, especially in applications with high-precision demands. The singularly perturbed approach has been extensively studied to model and control flexible-joint robot manipulators since it was first proven to be feasible in [
1]. By such a method, the controller can be easily implemented through developing sub-controllers for the two subsystems with precisely known system dynamics, and full-state feedback [
2]. Unfortunately, the actual situation is not so ideal.
It is always challenging to design controllers for robotic systems in the presence of uncertainties and/or disturbances, despite the extensive so-called robust control methods, such as robust adaptive control [
3], repetitive control [
4], back-stepping techniques [
5], iterative learning control [
6], etc. Among them, sliding mode control [
7], with its simplicity in application, insensitivity to parameter variations and disturbances implicit in the input channels and non-model based robustness, remains one of the most effective approaches in handling bounded uncertainties and/or disturbances [
8,
9]. However, the existence of high-frequency oscillations, like chattering, restrict the application of the traditional variable structure control schemes in practical situations and have a negative impact to all chains of the feedback control loops (sensors, actuators etc.), which creates high demands on smart system integration of mechatronic applications [
10,
11].
For chattering suppression, refs. [
12,
13] designed typical sliding mode controllers (SMCs) as a second auxiliary controller that has switching gains to suppress time-delay estimation errors to achieve robust tracking performance and to weaken the negative effects of chattering. A second-order integral SMC was provided to mitigate the chattering by ensuring finite time convergence in [
14,
15]. As an extension, a continuous sliding mode control design was introduced in [
16] to robotic systems with compliant actuators due to its advantages of strong robustness and chattering attenuation.
To a certain extent, the approaches listed above alleviate the chattering from the internal of SMC; whereas, regarding how to determinate the bounds of the unknown lumped uncertainties and avoid high switching gains that may amplify the chattering phenomenon, there are few general or effective solutions [
17,
18]. It was reported that the design of a controller involving a disturbance observer can balance the chattering and the switching gain. A novel integral sliding-mode-observer-based disturbance estimation scheme was designed in [
17] for Euler–Lagrangian systems, and a high-order disturbance observer based sliding mode control method was designed in [
18] to suppress both the mismatched and matched disturbances of system through feedforward compensation with disturbance estimation.
As an intelligent optimization mechanism, soft computing technologies include neural networks (NN), fuzzy logic, and probabilistic reasoning (evolutionary computation, chaos theory, etc.), and are preferentially considered to be integrated into the sliding mode control, to weaken the shortcomings of the classical sliding mode control strategy [
19]. Such works provide some inspiration to form the proposed solution in this paper for the flexible-joint robot manipulators.
The frequently used full-state feedback controller for flexible-joint robot manipulator requires state measurements (such as angular position or velocity) from the link side, but the corresponding sensors are sometimes absent for reasons including installation difficulty or hardware cost reduction. Similar conditions also occur in the position output feedback control of rigid robot manipulators, i.e., velocity or acceleration measurements by sensors are liable to be contaminated with external noise, and are always abandoned. To handle this issue, various estimation methods in terms of observation or filtering techniques [
20] are commonly incorporated to estimate the missing but required states in closed-loop control.
High-gain observers are frequently used in nonlinear feedback control, in particular in output feedback control situations [
20], for the reason that they are relatively simple to design, robust to modeling uncertainty and external disturbances, and can easily achieve global or semi-global stability results. However, they are sensitive to measurement noise, and suffer from the peaking phenomenon that could even destabilize a closed-loop system if the observer gain is driven sufficiently high [
21]. Sliding mode observers inherit the good robustness of the varied structure control, due to the insensitivity to uncertainties and the capability of reconstructing the uncertainties based on the equivalent injection input concept [
22]. However, it is difficult to choose a filter time to suppress the high-frequency noise of the system where the undesirable chattering will degrade the estimation performance.
As a nonlinear case of Kalman filter, extended Kalman filter (EKF), is typically adopted to achieve noise rejection in the measurement process and to enhance estimation accuracy through linearizing nonlinear systems (including robotic systems) [
23]. In comparison to the high-gain observer and sliding mode observer, EKF has neither peaking nor chattering phenomenon, and the ability to tolerate noise is embodied in the principle design of the EKF. However, the conventional use of EKF to observe the link states brings time-consuming computing of Jacobian matrix and worsens the implementation feasibility of EKF. Such issues are also discussed in this work.
NNs have excellent ability of nonlinear fitting and complex mapping, furthermore, their learning rules are simple and easy to implement on the digital controller [
24]. Radial basis function neural network (RBFNN), as a favorable forward-feedback NN, can approximate any continuous nonlinear function with arbitrary precision, and also features rapid convergence, good adaptation and strong self-learning [
25,
26]; thus, it is utilized in this paper as an external factor through feedforward compensation and a class of saturation functions is applied as an internal factor in the reaching law of SMC to help suppress the chattering phenomenon caused by SMC.
To the best of our knowledge, few works have attempted to integrate the NN-based soft computing technology and sliding mode theory to design composite controllers for singularly perturbed systems. Furthermore, this is the first time in such situations to address the chattering suppression problem in SMC from a combined respective via the internal and the external of SMC. The main contributions of our work are summarized as follows.
- (1)
A smooth saturation function that can obtain a sufficiently fast response characteristics near the origin to guarantee robustness through an adjustable saturation factor, is applied internally to replace the commonly used non-smooth switching function in the design of smooth-saturation-function-contained reaching law to alleviate the inherent chattering phenomenon of the sliding mode control. Simultaneously, NN-based soft computing is designed externally to run online to avoid chattering amplification caused by high value of switching gain required to cover the upper bound of the dynamics uncertainties and external disturbances. Thus, these two factors enable a chattering suppression strategy to work from both inside and outside the SMC and to help achieve superior dynamic performance of the proposed controller.
- (2)
Different from the conventional treatment, by applying the concept of integral manifold within the frame of singular perturbation theory, the fast subsystem of the robot dynamics is reshaped into a typical tracking system to ensure the fast variable converges to zero over time but without considering it in the system model, thus, providing more flexibility on controller design.
- (3)
An efficient EKF with a new state variable that simplifies computing the Jacobian matrix is applied to achieve closed-loop tracking control without angular position or velocity measurements of links.
- (4)
Strict stability analyses on the proposed closed-loop control system in terms of two singularly perturbed subsystems and the whole system with estimation error as well as EKF are given.
In the remainder of this paper,
Section 2 deals with the dynamics modeling of flexible-joint robot manipulator in framework of singular perturbation theory. In
Section 3, a singularly perturbed SMC is proposed. RBFNN-based soft computing to assist the SMC with handling the dynamics uncertainties and external disturbances of the system is designed in
Section 4, while
Section 5 presents an EKF with new state variable to observe the states of links.
Section 6 provides an overall stability analysis of the whole system, and validation examples are given in
Section 7. Finally, our conclusions are given in
Section 8.
2. Dynamics Model
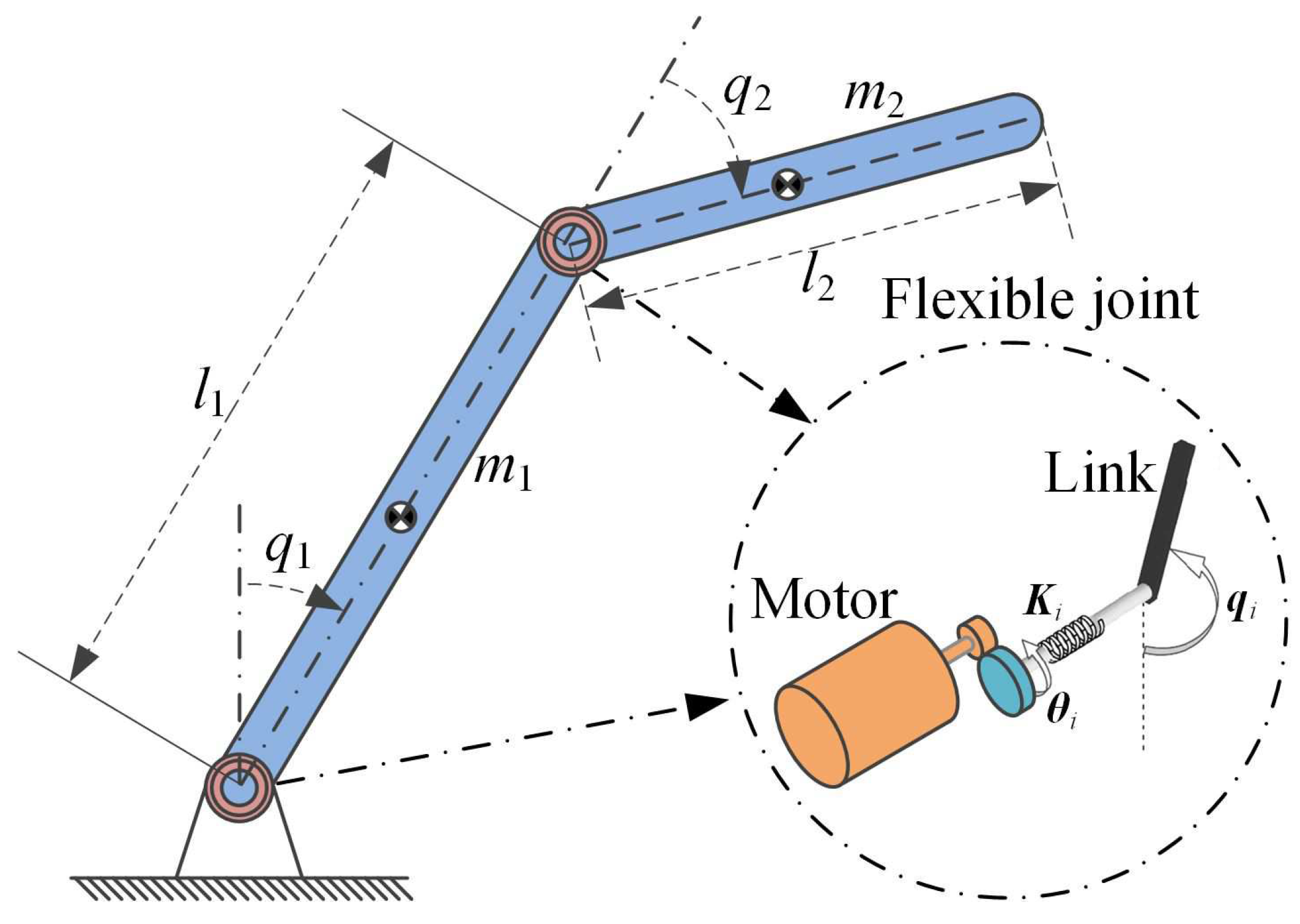
The dynamics of an
n-link flexible-joint robot manipulator can be written as [
1]
where
and
denote the angular position, velocity, and acceleration of the links and motors, respectively.
is the positive definite inertia matrix,
is the centripetal-Coriolis matrix,
is the gravitational of the link dynamics,
is the elastic torque at flexible joints, and
are positive definite constant diagonal matrices representing joint stiffness and motor inertia, respectively.
is the control input of motor torque. In brief, we use
,
,
and
, to represent
,
,
and
, respectively, in the text that follows.
To simplify the expressions, without loss of generality, order
(
is an identity matrix), and the perturbation coefficient
can be set as
, substitute (2) and (3) into (1); then, we obtain the whole system in original singularly perturbed form with reference to the standard expression [
27]
To facilitate the decoupling, the concept of an integral manifold [
27] is utilized to derive the slow subsystem and the fast subsystem.
We define the elastic torque
as an integral manifold
where
(written as
for short) is assumed to be a sufficiently smooth (continuously differentiable with sufficient times) function that depends on
and
.
The corresponding Taylor series expansions of
in (
6) in powers of
are given as
where
is the expansion with respect to
and can be calculated iteratively.
Let
and
be the control inputs for the slow subsystem and the fast subsystem, respectively, and the composite controller is given as follows:
2.1. Slow Subsystem
Define the slow variable as
(written as
for short) in slow-scaled time
t, when the joint stiffness coefficient
, i.e.,
, we find
,
turns into
, that is
and
reduces to
; then, from (
4) and (
5), we find
Substituting (
11) into (
10), the slow subsystem can be obtained as
Remark 1. The slow subsystem (12) can be recognized as the rigid part (which is essentially equivalent to the model of rigid robot manipulators) of the flexible-joint robot manipulator, and thus the existing control approaches based on the dynamics of rigid robot manipulators can be applied directly to the slow subsystem. Remark 2. The perturbation coefficient μ is related to the spring coefficient . The rule for selecting μ relies on the and the should be sufficiently large so that the fast variables can be fast
enough in fast-scaled time . However, in practical applications, cannot be close to infinity, and the order of its magnitude is often or so, i.e., the value of μ is on the order of . Though μ is small, it is not so close to zero that a fast sub-controller for the fast subsystem is required to constrain the error caused by ignoring higher-order terms of the expansion of in (7). 2.2. Fast Subsystem
Considering the high-order terms (which are generated by the joint flexibility and are neglected in slow subsystem) of the Taylor series expansions with respect to
in slow subsystem in (
7), we define the fast variable
as
Recalling (
5), when
turns into
and
turns into
, we find
From (
5), (
13) and (
14), we find the fast subsystem
Considering (
9) and (
13), (
15) can be rewritten as a reshaped fast subsystem
where
.
Remark 3. Recalling the most commonly used expression of fast subsystem (15) proposed by Spong [1], it is necessary to calculate and or apply optimal control techniques [28] to work out the . In contrast, the reshaped fast subsystem (16) in this paper is actually a fast subsystem with a new control aim (different from that in [1,28,29]), to enable to tend to , that is to make the fast variable converges to zero over time but without considering it in the system model, which makes the fast controller design flexible. Therefore, it is expected in the following part to design the control laws of
and
for the slow subsystem (
12) and the reshaped fast subsystem (
16), respectively, to make
track
(which is the desired link position) and
track
.
4. RBFNN-Based Soft Computing Strategy
Considering the uncertainties of the dynamics model and disturbances of the torque control input, the expressions (
12) and (
15) for flexible-joint robot manipulators can be rewritten as
where
,
,
,
and
denote the uncertainties of each term of the model,
and
are the disturbance terms of the control inputs to slow subsystem and fast subsystem, respectively.
From (
28) and (
29), we find
where
, and
are the uncertainties and disturbances of the slow subsystem and the fast subsystem, respectively.
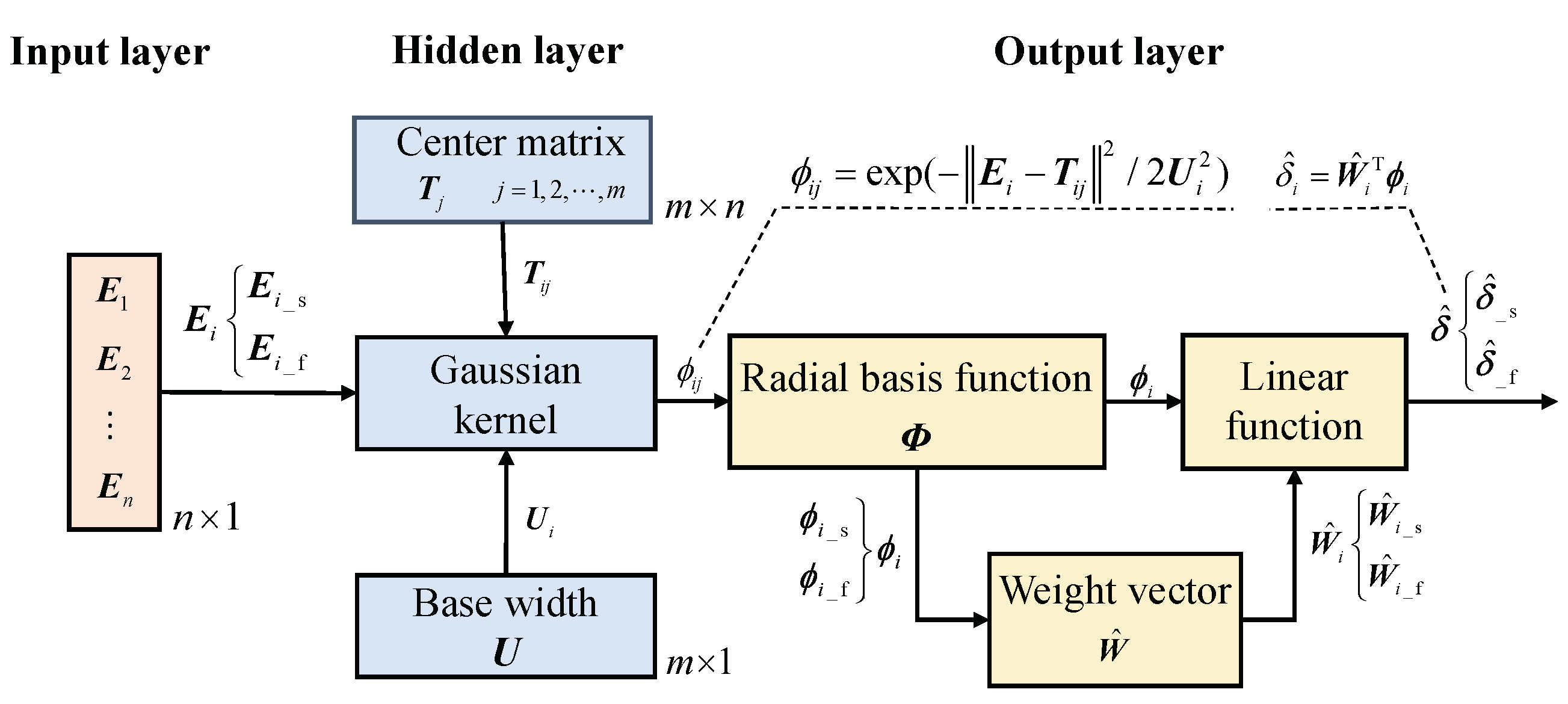
Remark 6. The robustness of sliding mode is closely related to its switching gain. When the model parameters are uncertain due to inaccuracy of parameter identification, and the switching gain needs to be adjusted in response. The gains (especially ) of the proposed SMC should be adjusted to be large enough to cover the bounds (which are susceptible to changes in model parameters) of the system uncertainties and external disturbances (in (30) and (31)) and to reject the resulted undesirable effects. Although the chattering phenomenon is reduced greatly by the reaching law involving smooth saturation function, such high coefficients in the switching control (by (21) and (25)) will still enlarge the influence of chattering. Meanwhile, the bounds of the system uncertainties and/or external disturbances are always unknown and difficult to determine. Hence, RBFNN-based soft computing strategy is applied subsequently to provide feedforward compensation to alleviate the pressure of SMC to process lumped uncertainties and to help enhance the overall performance of SMC, which will be verified in Section 7. RBF-based soft computing is designed for each subsystem individually, and is running online. According to [
25], we define the input layer of the RBFNN as error term
, where
is the error vector of either the slow subsystem
or the fast subsystem
of the
i-th joint:
and the hidden layer as the radial basis function
, where
is the radial basis function (Gaussian kernal) of either the slow subsystem
or the fast subsystem
of the
i-th joint, the
j-th activation function
(
or
) of
(
or
) is given as
where
,
m is the node number of the hidden layer.
and
are the center matrix and base width of the
i-th joint, respectively.
is the center vector corresponding to the
j-th weight value of the
i-th joint.
Suppose the fitting error is small enough, and the
i-th joint error
(
or
) of the (slow or fast) subsystem can be expanded into
, where
(
or
) is the ideal connecting weight value between the hidden layer and the output layer. Thus, the actual
i-th joint output layer
of the NN can be designed as
where
(
or
) is the approximate value of the ideal connecting weight matrix
.
The adaptive control law is designed as
where
(
or
) is a constant and
(
or
) is the sliding surface of the
i-th joint.
Remark 7. Unlike the traditional NNs [33,34,35] that have to rely on time-consuming off-line training to optimize the model, the RBFNN-based compensator designed in this paper is in online self-adjusting working mode with simple structure and small computing burden. It is a three-layer forward network. The mapping from input to output is nonlinear, while the mapping from hidden layer to output layer is linear. Importantly, the RBFNN is a local approximation NN that can greatly speed up the learning and is suitable for real-time control requirements. Its operational structure is sketched by Figure 1, where the in the input layer is the error term defined by (32), the Gaussian kernel by (33) is chosen in the hidden layer for the RBF, and the in the output layer is the approximation of the error of i-th joint caused by dynamics model uncertainties and joint torque disturbances and is updated by (34) with the adaptive control law (35). Finally, the control law (
22) and (
27) can be rewritten as
where
is the output layer of the RBFNN for the slow subsystem, and
is the compensation term of its control input, while for the fast subsystem,
is the output layer of its RBFNN and
is the compensation term of its control input.
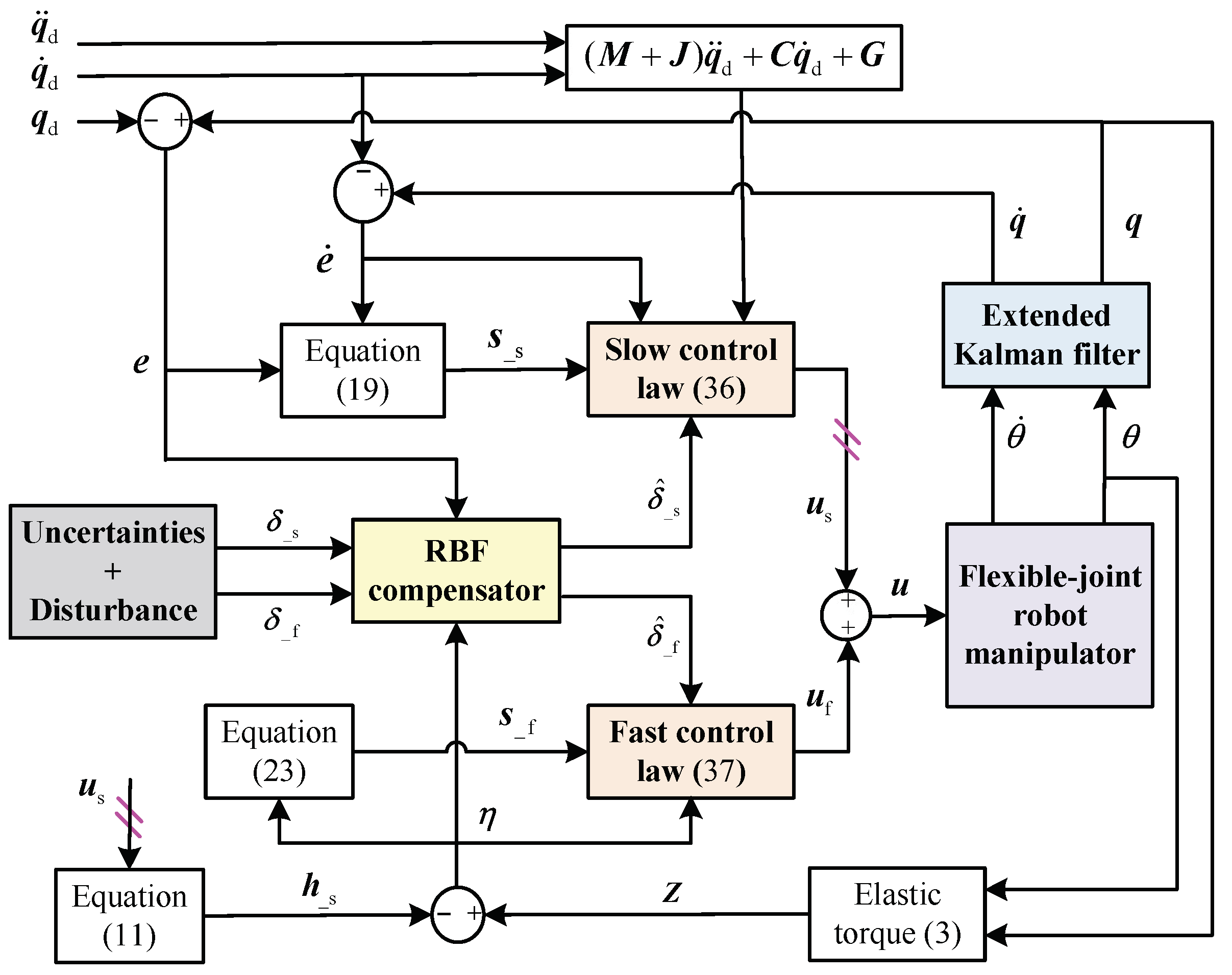
Remark 8. As presented by (8), (36), and (37), inheriting the idea of decomposing the whole dynamics of an n-degree-of-freedom flexible-joint robot manipulator by (1) and (2) into two subsystems in the framework of singular perturbation theory, acts on the slow subsystem (rigid part), while acts on the fast subsystem (flexible part) to depress the influence caused by the joint flexibility. Both sub-controllers are designed with the sliding mode control strategy, where the and involved are obtained from the EKF proposed in Section 5, making the closed-loop control without measuring link states. Moreover, an RBFNN-based error compensator is included in the proposed SMC. The block diagram of the proposed control approach is shown in Figure 2. 6. Stability Analysis
The overall stability of the closed-loop system in terms of two singularly perturbed subsystems and also whole system with the proposed EKF and RBFNN-based soft computing involved sliding mode control approach is analyzed by the following steps.
Step 1: The stability analysis of the slow subsystem.
Theorem 1. Consider the dynamics of the slow subsystem described by (30) with the proposed sub-controller (36), it results in asymptotic convergence of the state and output tracking errors in the sense that , , as . Proof. Considering the approximation error of the connecting weight value caused by RBF based soft computing in slow subsystem, a Lyapunov function candidate
is defined as
where the approximation error of connecting weight in slow subsystem is defined as
. Clearly,
is positive definite.
Take the derivative of
with respect to time
t, and substitute (
30) and (
36) into it, we find
Substitute (
35) into (
49)
By recalling the definitions of sliding surface (
19) and the reaching law (
21) for slow subsystems, as well as the monotonicity of saturation function
, we find that
is negative definite, and the slow subsystem is asymptotic stable in the sense that
,
as
, due to the positive definiteness of
and the negative definiteness of
. □
Step 2: The stability analysis of the fast subsystem.
Theorem 2. Consider the dynamics of the fast subsystem described by (31) with the proposed sub-controller (37): ifis satisfied, where and are the minimum eigenvalue and the maximum singular value of matrix, respectively, then it results in asymptotic convergence of the state and output tracking errors in the sense that , , as . Proof. Considering the approximation error of the connecting weight value caused by RBF based soft computing in fast subsystem, a Lyapunov function candidate
is defined as
where the approximation error of connecting weight in fast subsystem is defined
. Clearly,
is positive definite.
Substitute (
23) and (
31) into (
52), then take the derivative of
with respect to the fast-scaled time
, we find -4.6cm0cm
Substitute (
37) and (
35) into (
53) in sequence, and we have
where
To ensure
is negative definite, together with considering the monotonicity of saturation function
,
should be positive definite, i.e., inequality (
51) is to be satisfied by proper selection of positive definite constant diagonal matrices
and
. Thus the asymptotic stability of the fast subsystem is achieved if constraint condition (
51) is satisfied. □
Step 3: The stability analysis of the whole system.
Note that, the slow subsystem (
30) involved in
Step 1 is an approximate model based on (
12), which is derived by assuming the joint stiffness coefficient
, it is not qualified to present the complete dynamics by (
10). Thus, in the stability analysis of the whole system, we need an updated expression of (
30) from (
10) with considering uncertainties of dynamics model and disturbance of the torque control input:
where
.
Substitute (
11) and (
36) into (
55), we find
Theorem 3. Consider the dynamics of the whole system described by (55) and (31) with the proposed sub-controller (8), (36) and (37), if the following inequalitiesare satisfied, then it results in asymptotic convergence of the whole system and the control objective (17) is achieved. Proof. Consider a Lyapunov function candidate
V as
where
a and
b are both positive constant. Similar to [
29], we also select
. It is easy to find that
V is positive definite.
Substitute (
56), (
23), (
31), (
37) into
in sequence, we have
where
It can be found that,
will be negative definite if
and
are all positive definite, i.e., the inequalities (
57)–(
59) are to be satisfied by proper selection of positive definite constant diagonal matrices
,
and
.
Thus, the whole system yields asymptotic stability through the positive definitiveness of
V and the negative definitiveness of
, and the control goal (
17) is achieved. □
Step 4: The stability analysis of the EKF with new state variable.
For the proposed EKF, we first expand
and
by
where
and
are the terms of the second and higher orders in (
).
We define the observation error as
and then, from (
39), (
42), (
62) and (
63), we find
The proof of exponential stability of the proposed EKF is equivalent to certifying that the differential Equation (
65) for the observation error is exponentially stable at
0 [
36]. To facilitate the expressions,
,
,
,
and
are used to represent
,
,
,
and
, respectively.
Theorem 4. Consider the nonlinear system of flexible-joint robot manipulator by (55), (31) and the proposed EKF by (42)–(45), without loss of generality, let the following assumptions: , , , , and hold, where , , , , , and are all positive constants, is the identity matrix with the same dimensions as , and , then there are positive constants ε, α and β such that the proposed EKF is exponentially stable, i.e.,holds for every and for every solution of (
65)
with . Proof. Consider a Lyapunov function candidate as
where
is positive definite due to that
is positive definite; therefore, the positive definiteness of
is guaranteed.
After taking the time derivative of
, considering
,
, (
43), (
44) and (
65), we obtain
Note that the term
in (
69) is positive definite, then we have
Hence, for all
with
, where
is defined in (
66), we have
and the solution of (
71) is
From (
68) and (
72), it leads to
i.e., the inequality (
66) is achieved with
and
, and thus the exponential stability of the EKF with new state variable is guaranteed. □
Finally, the asymptotic stability of the whole system with the proposed EKF is achieved if (
51), (
57)–(
59), and the assumptions in
Theorem 4 hold.
8. Conclusions
This paper discusses sliding mode control and its chattering suppressing method for flexible-joint robot manipulators with neither position nor velocity measurements of links, within the frame of the singular perturbation theory. We have shown that, within the framework of singular perturbation theory, the slow and the fast subsystems are transformed into two typical tracking systems without calculating or . The slow subsystem is to make track , while the fast is to make track . This makes the controller design easy and flexible. Furthermore, asymptotic stability of the whole control system is proved by comprehensive and strict analysis.
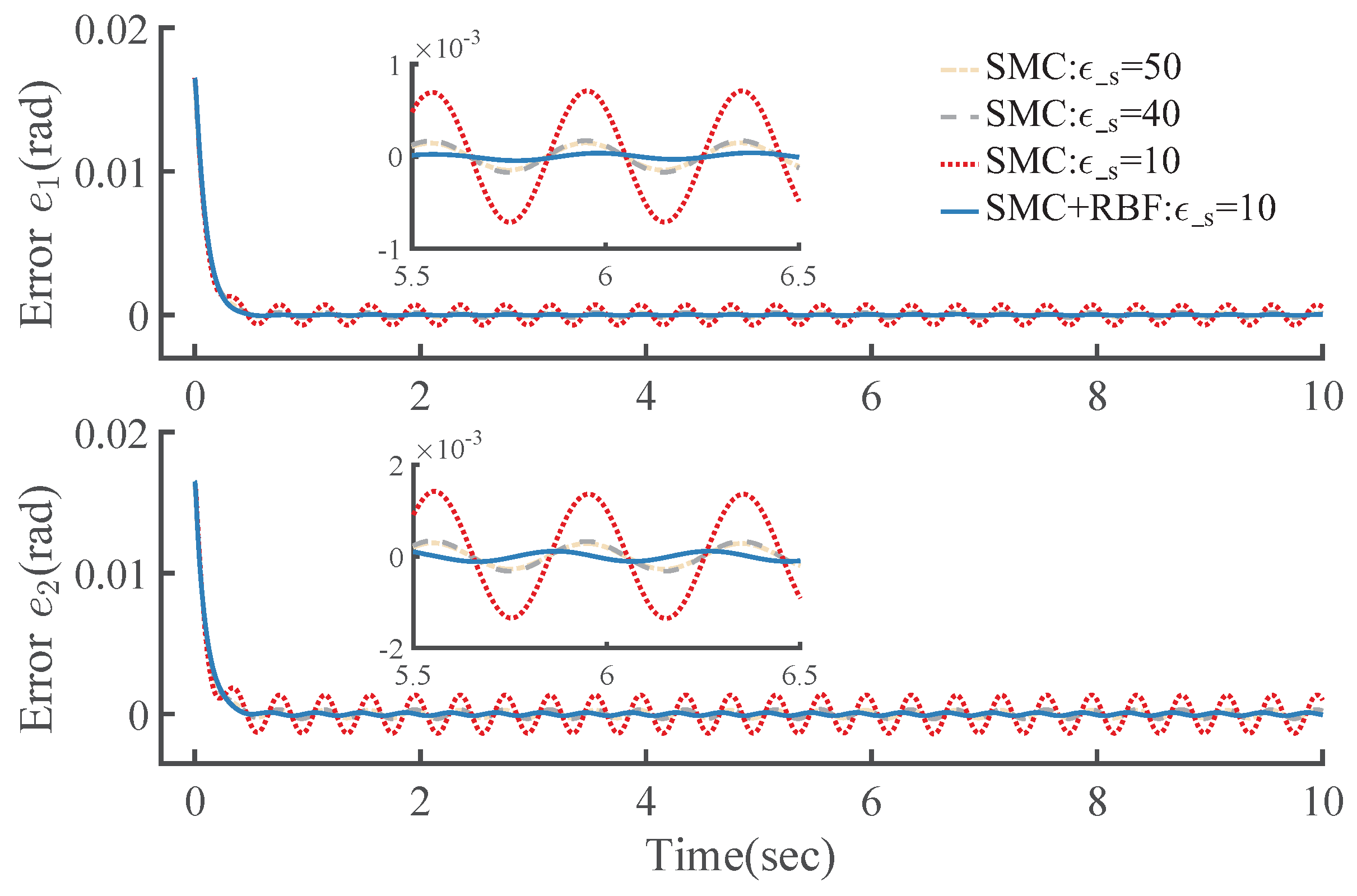
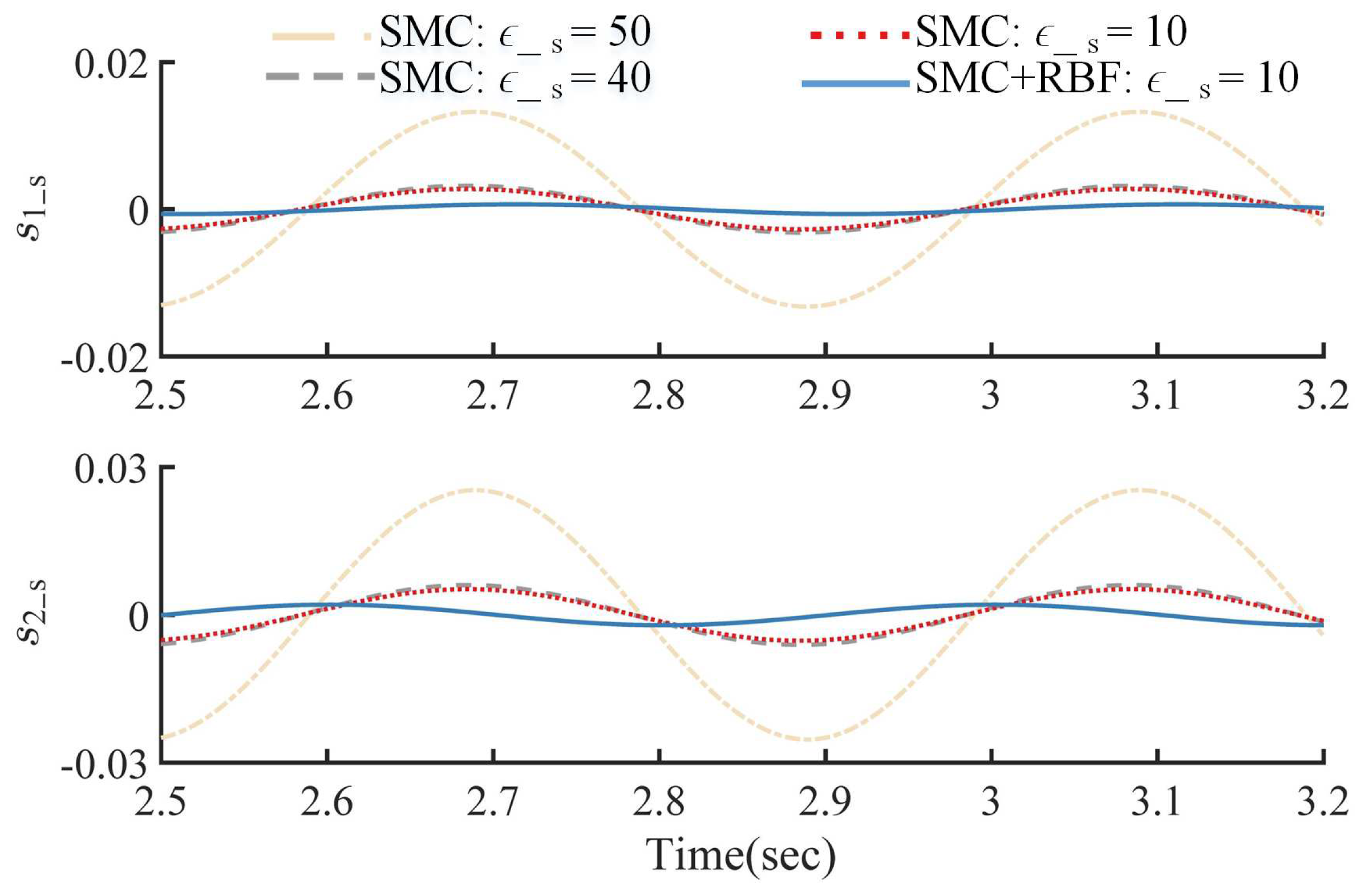
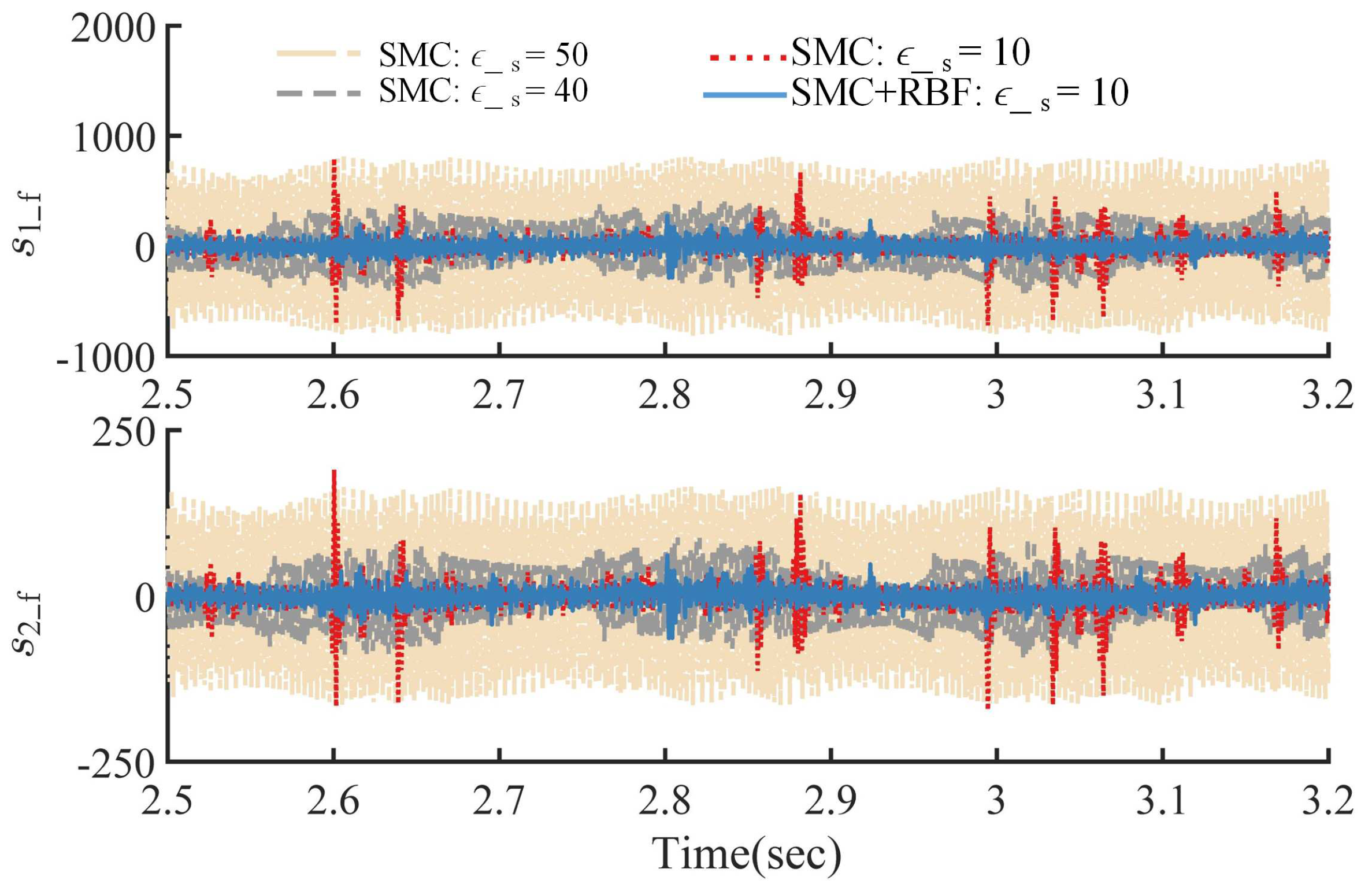
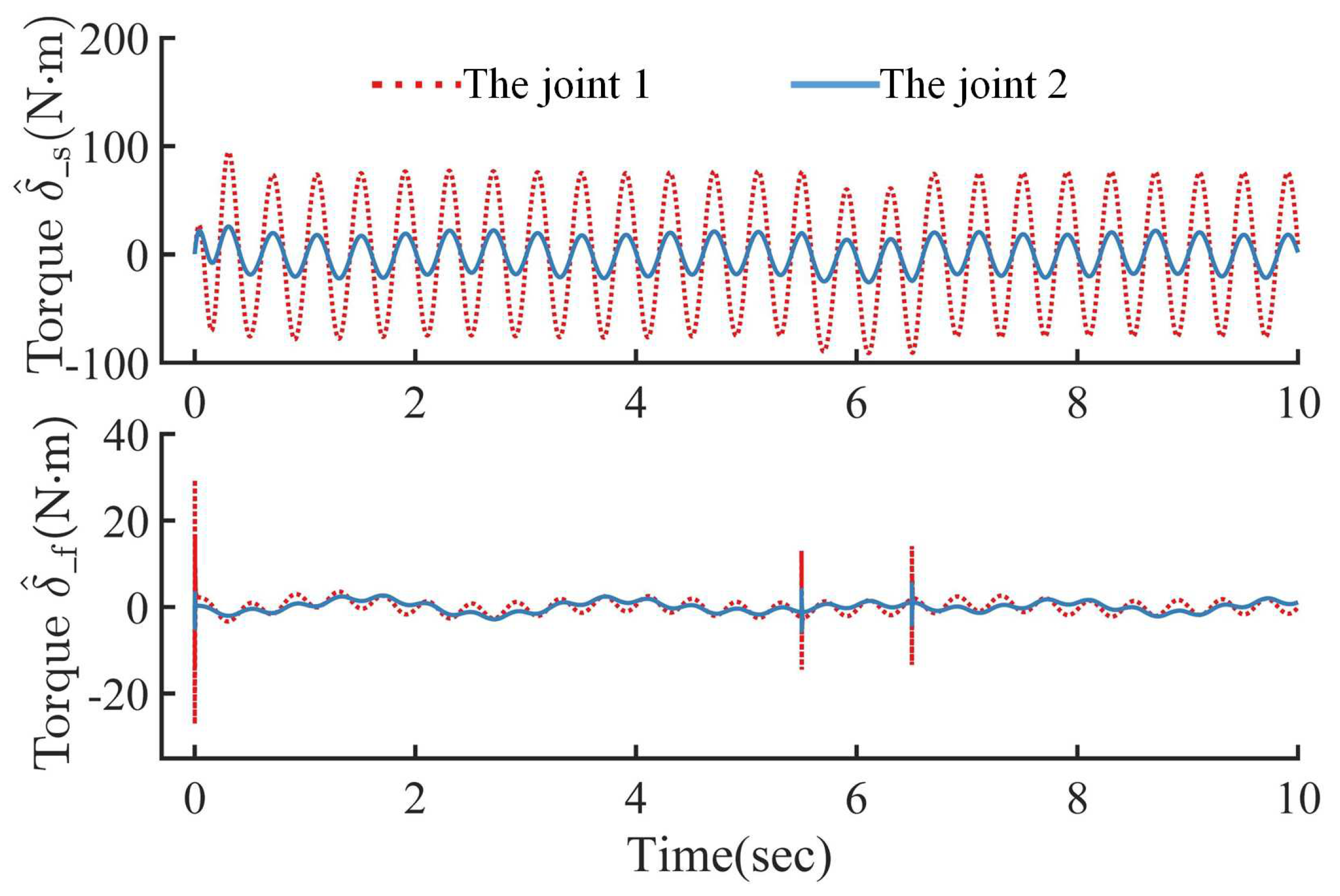
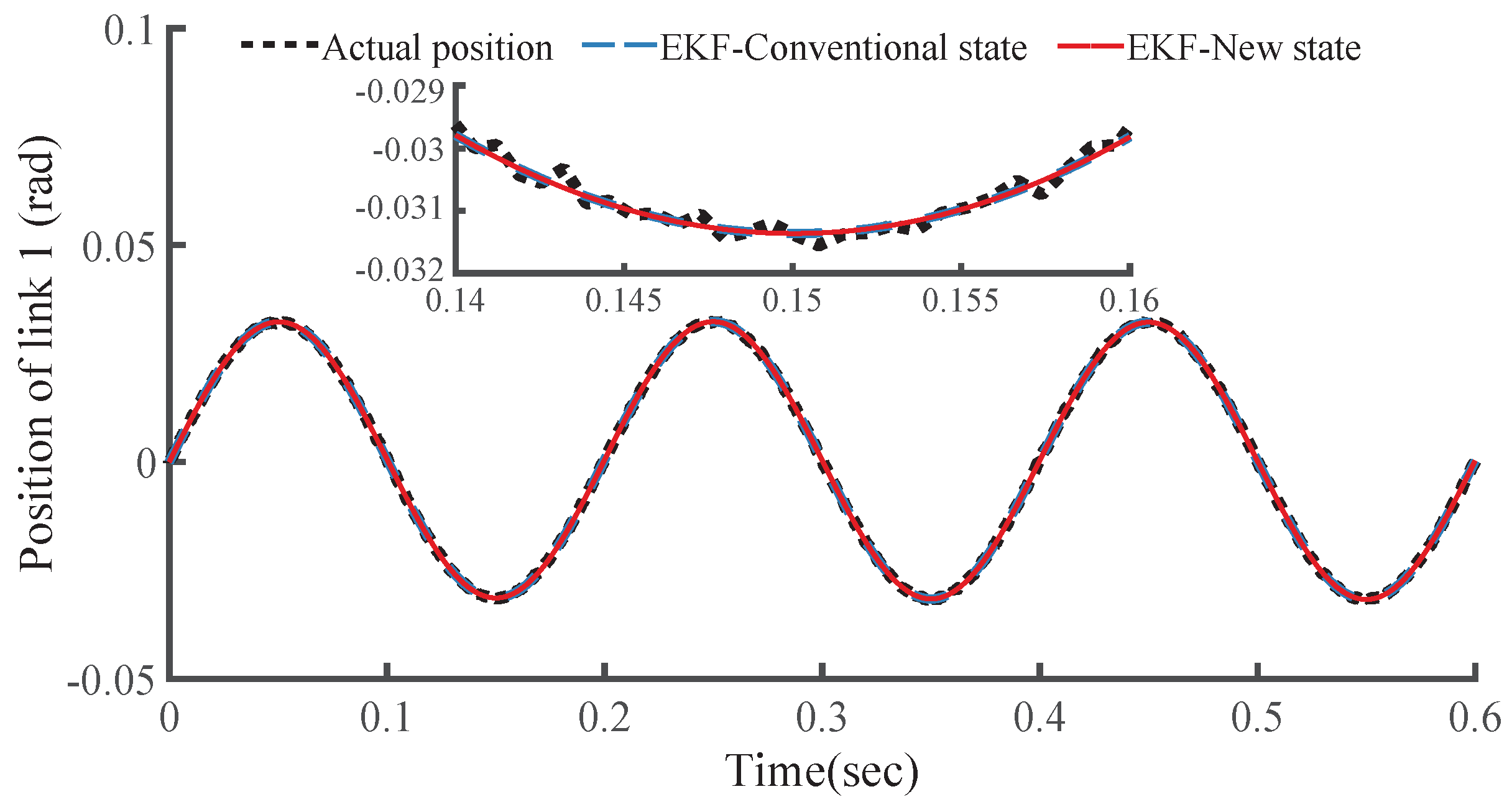
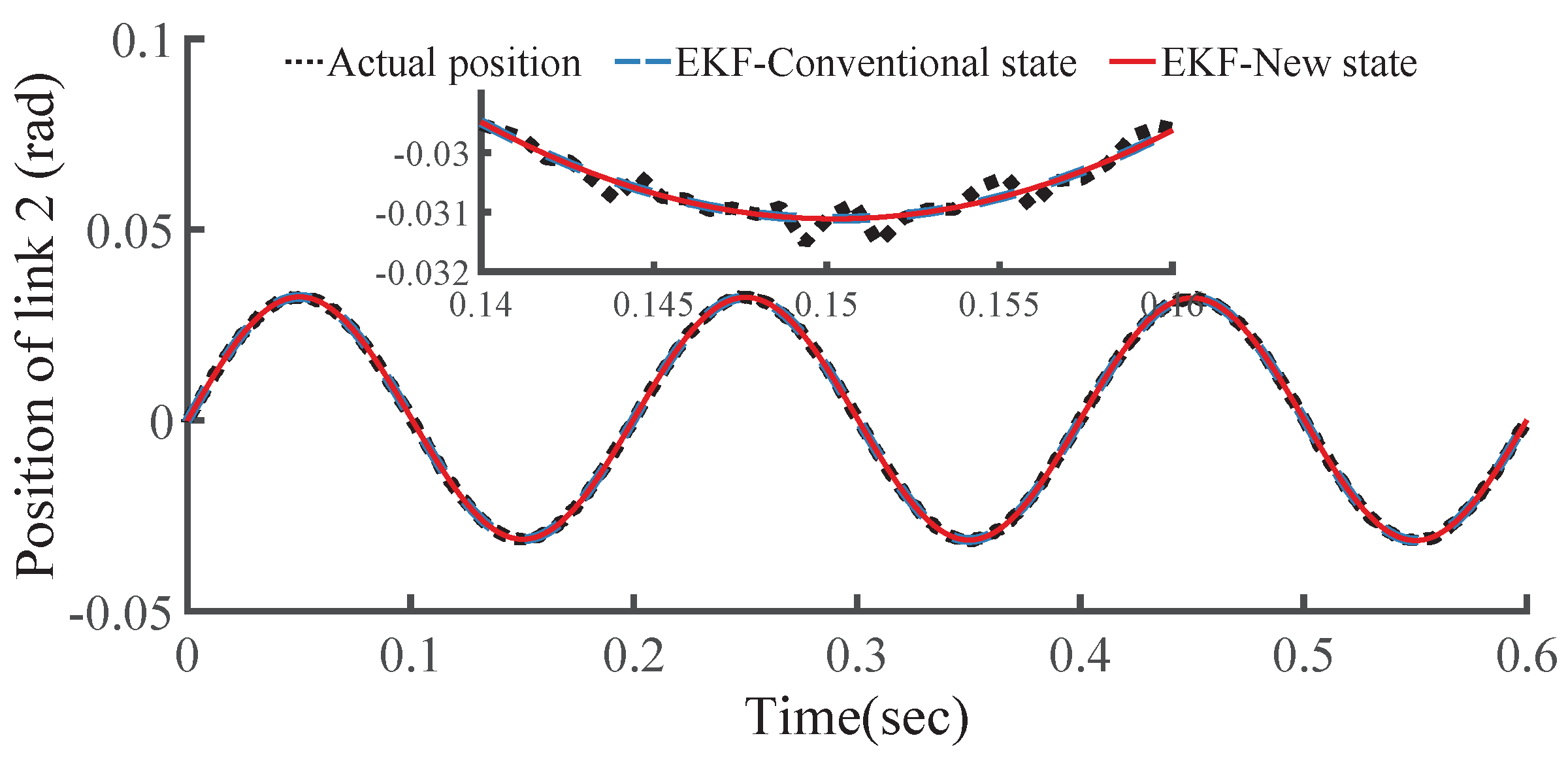
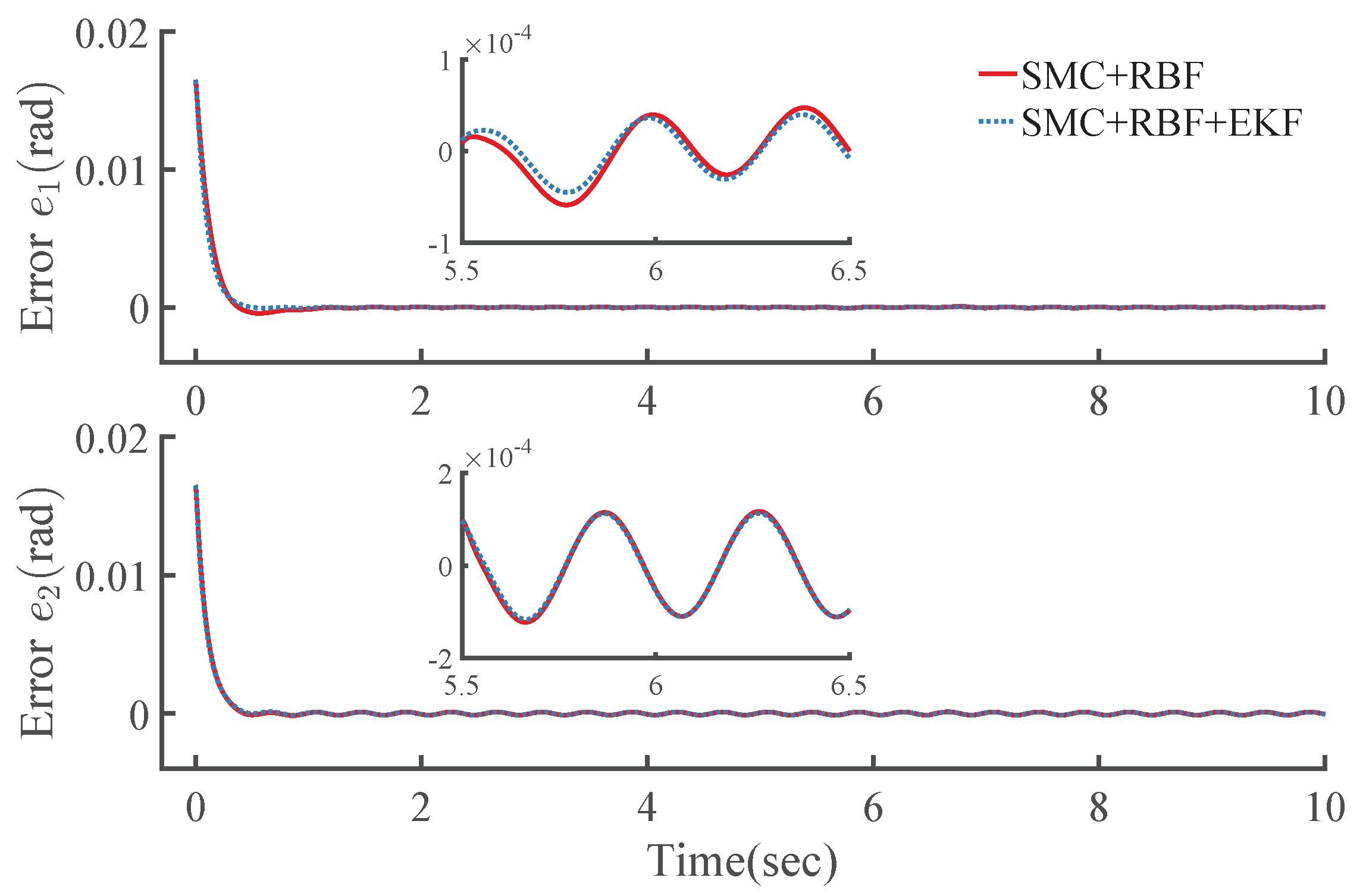
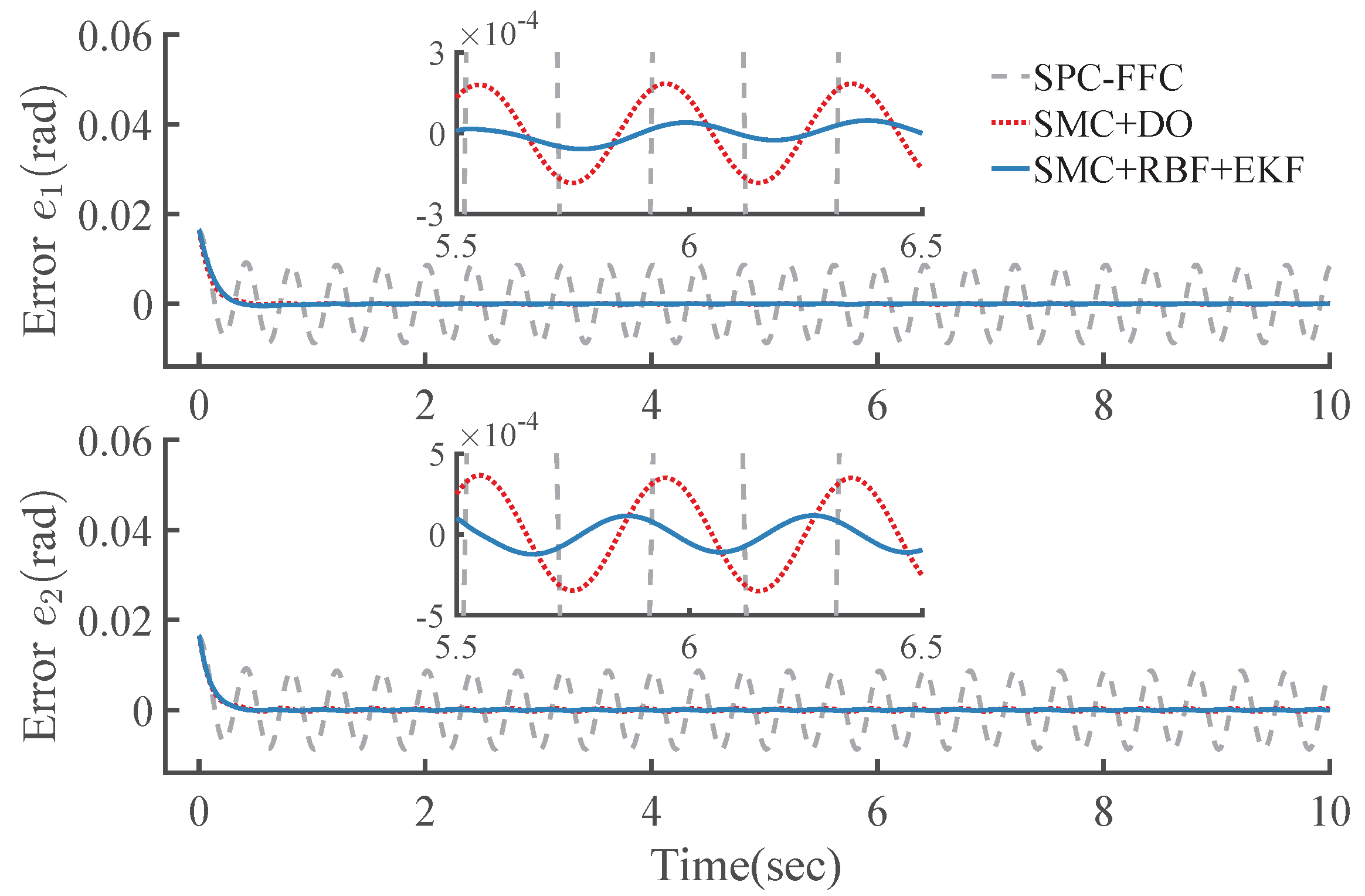
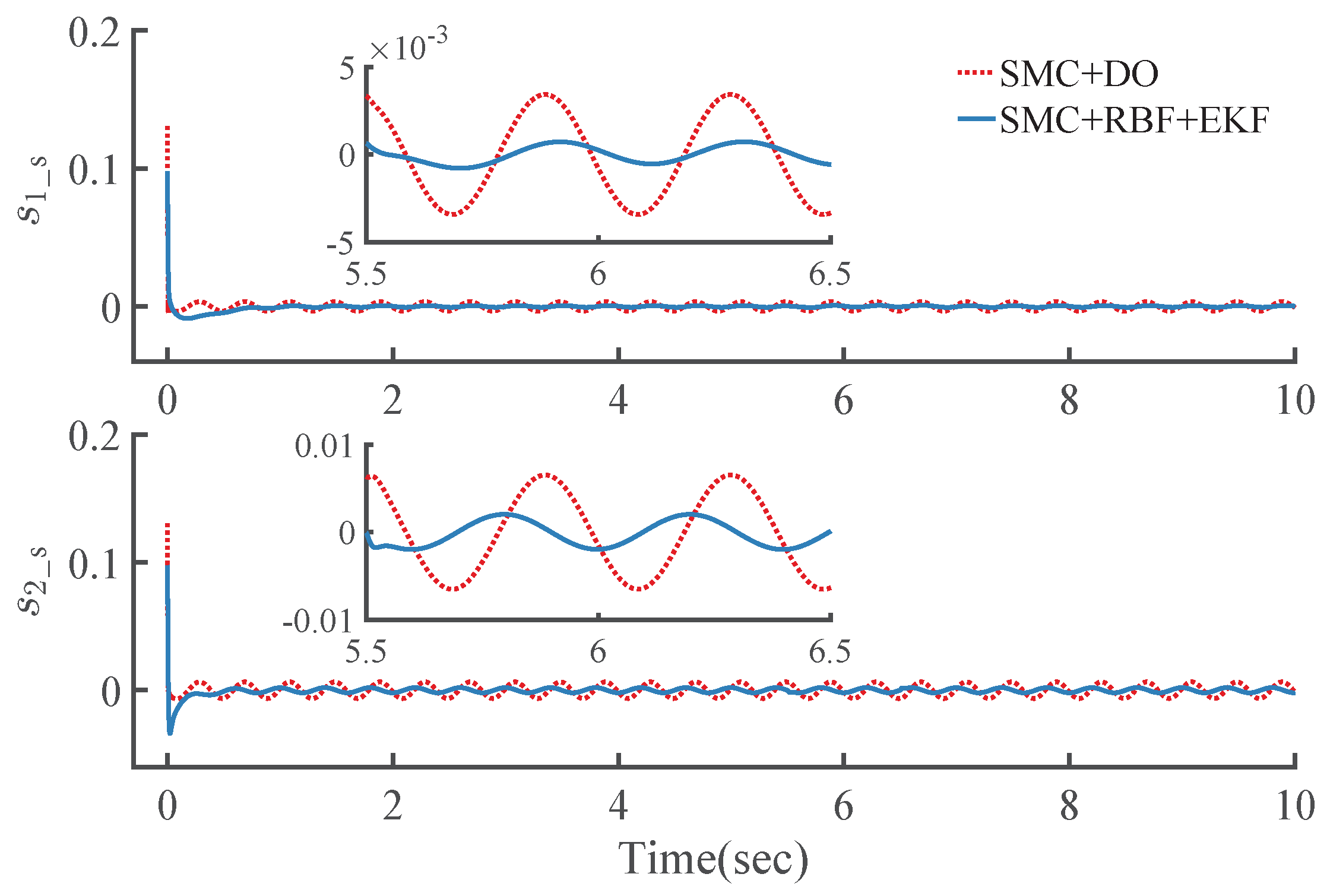
The EKF with respect to a new state variable simplifies calculating the Jacobian matrix, and is validated to be qualified to observe the position and velocity of links, with a nearly equal dynamic performance with higher computing efficiency, in comparison to the EKF with conventional state variable. After the smooth-saturation-function-contained reaching law is dedicated in a proactive way to alleviate the inherent chattering internally in the proposed SMC, online operational RBFNN-based soft computing as an external chattering-suppressed method is validated to be effective to avoid requiring large switching gain to cover the upper bound of the lumped uncertainties that may cause severe chattering. This enables a superior dynamic performance without state measurements of links for the proposed approach than the benchmark controllers with full-state feedback.
Experimental verification of the proposed SMC on physical platform will be pursued in future work. Furthermore, future researches can attempt to extend the proposed SMC with an NN-based soft computing strategy to robots via a data-driven way that is model-free to, thus, omit the complicated process of identification and verification of model parameters.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}