
A Novel Double Redundant Brake-by-Wire System for High Automation Driving Safety: Design, Optimization and Experimental Validation

Abstract
:1. Introduction
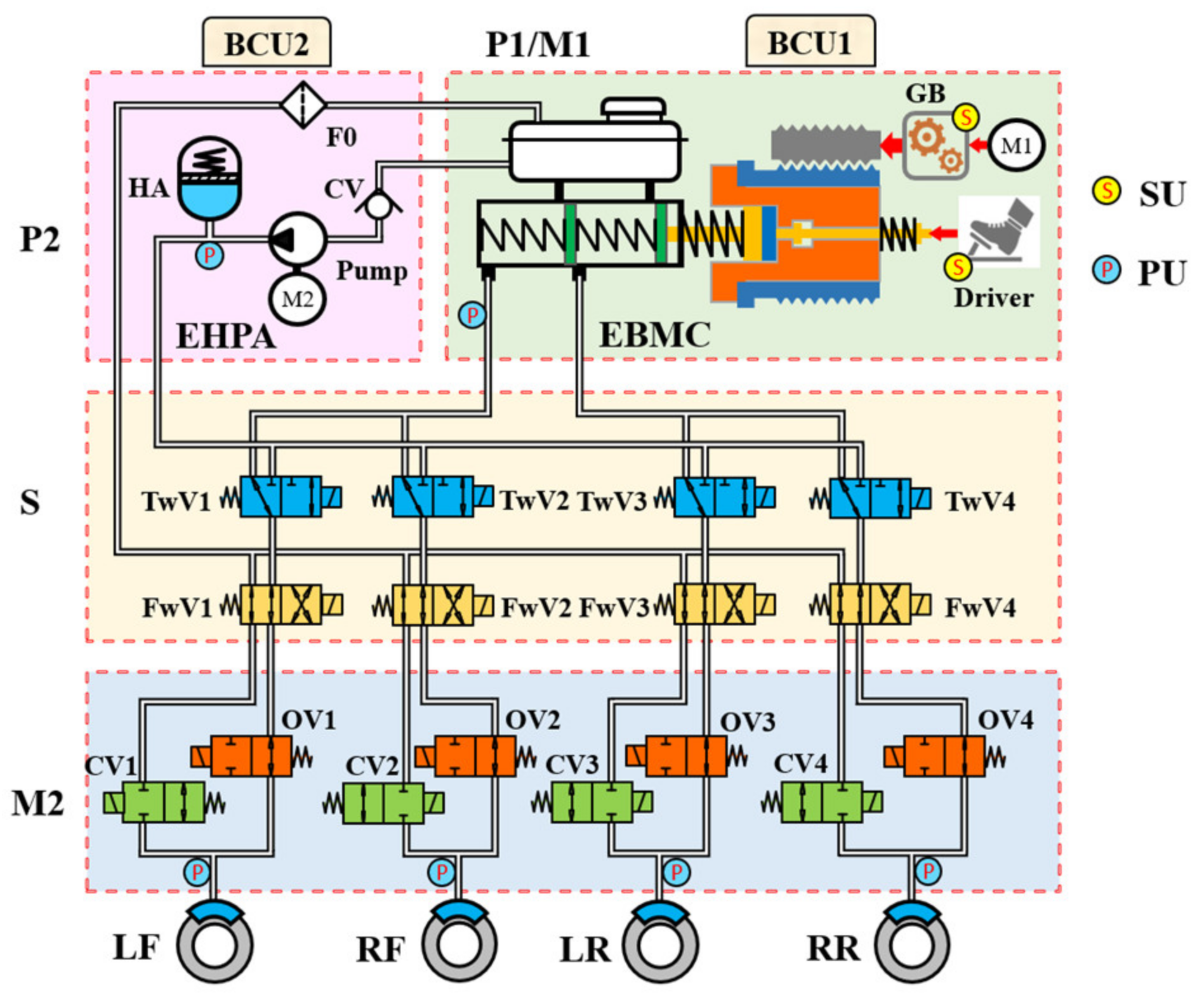
2. System Configuration Design
3. System Operation Principles
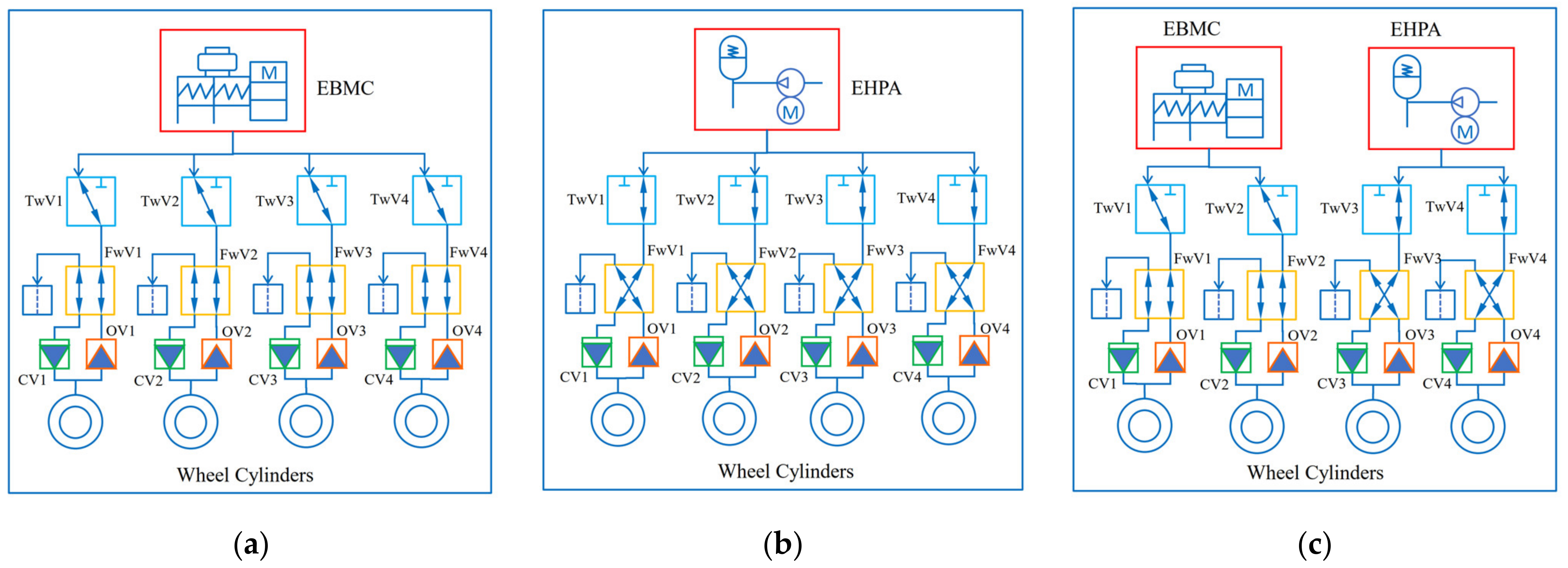
3.1. Normal Initiative Braking Modes
3.1.1. NIB A Mode
3.1.2. NIB B Mode
3.1.3. NIB C Mode
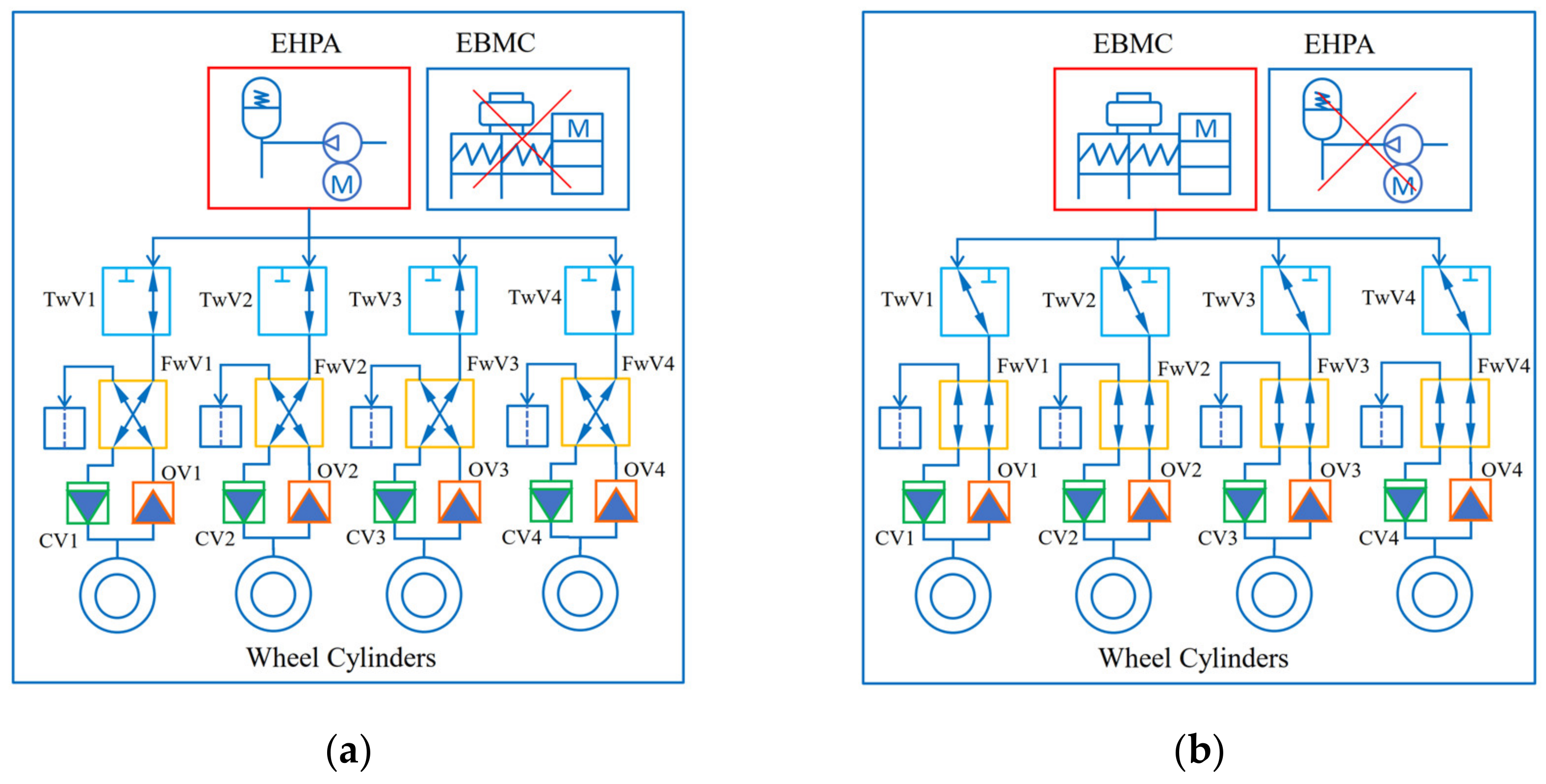
3.2. Degraded Initiative Braking Modes
3.2.1. DIB F1 Modes
3.2.2. DIB F2 Modes
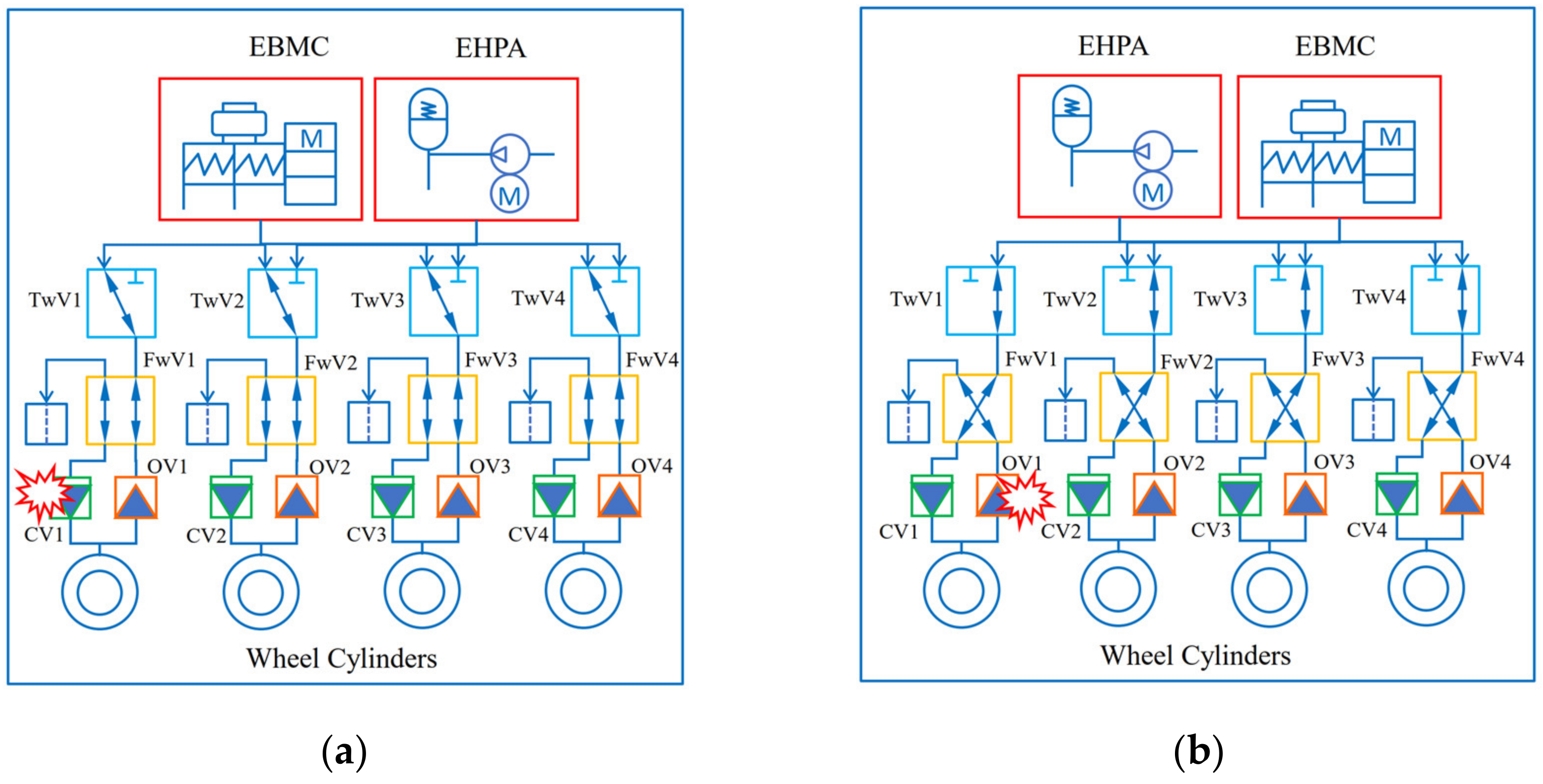
3.2.3. DIB F3 Modes
4. Parameter Matching and Optimization
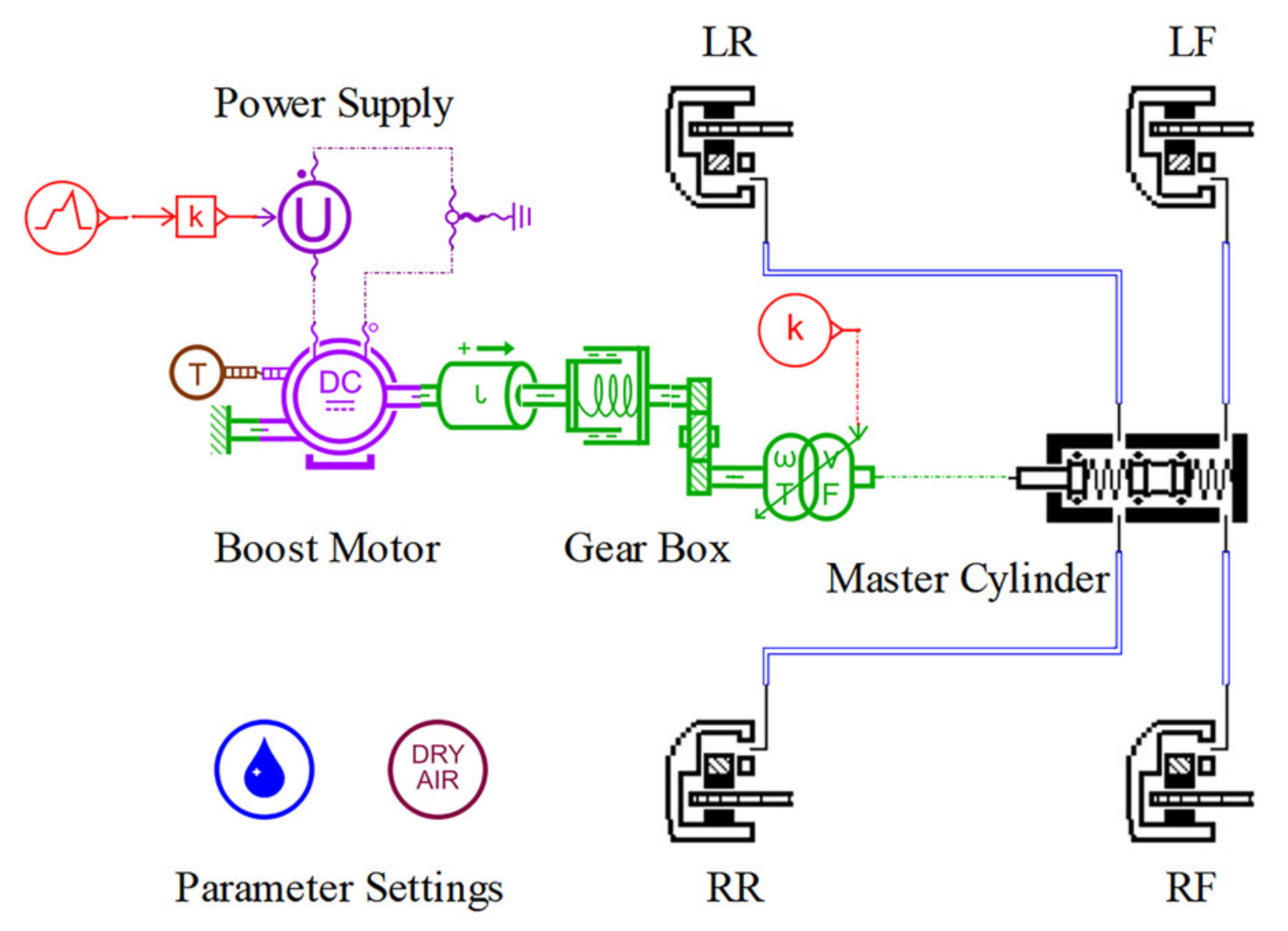
4.1. Electric Boost Master Cylinder
4.1.1. Static Performance with Primary Specification
- In the case of rotor locking, the motor speed is 0;
- Under a no-load condition, the zero-load current is ignored;
- Assume that the motor has no magnetic flux leakage.
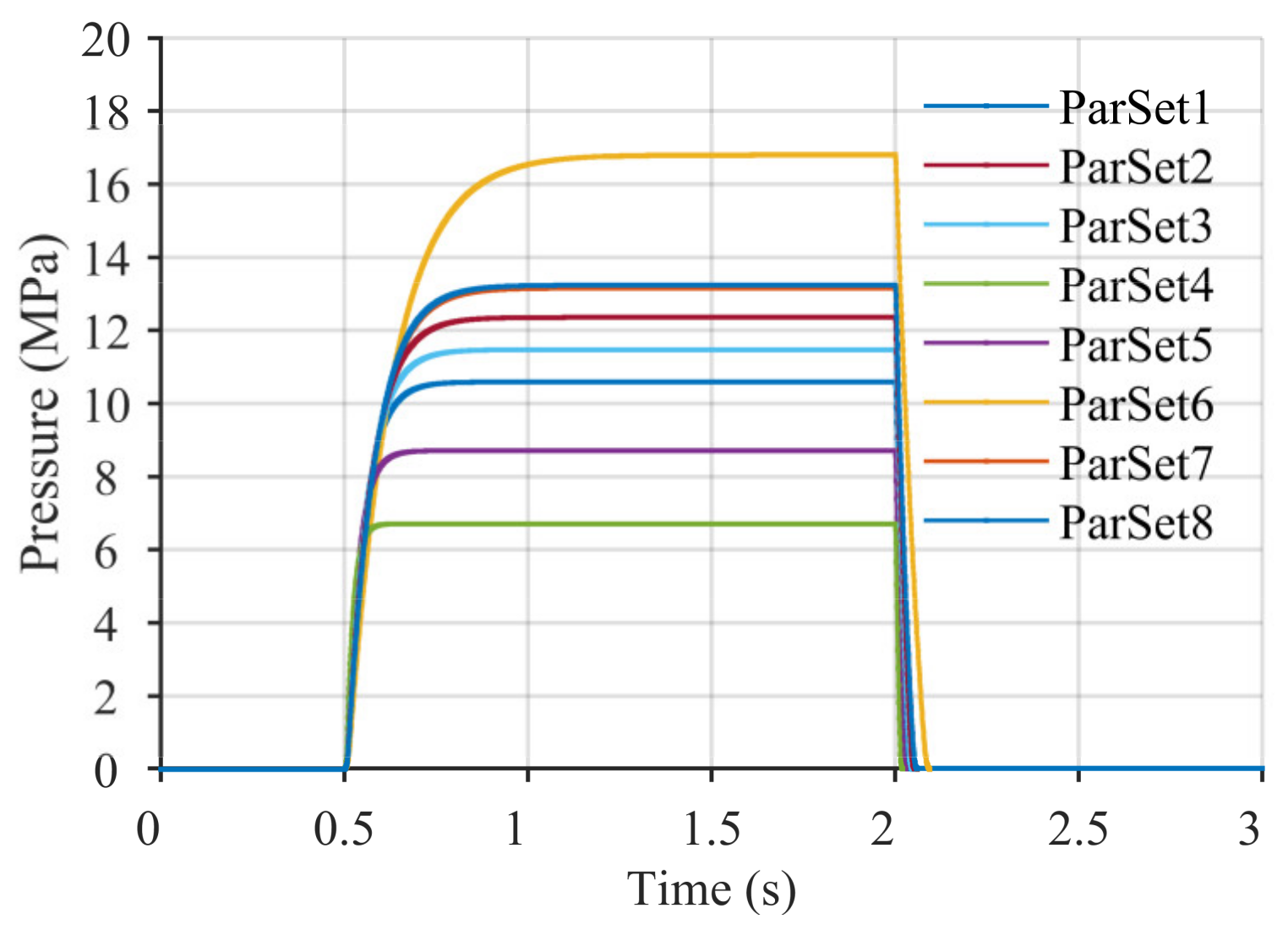
4.1.2. Dynamic Simulation and Parameter Matching
- Component selection, engineering drawing design, and strength check;
- Electronic control unit development;
- Digital simulation and development.
4.2. Linear Solenoid Valve
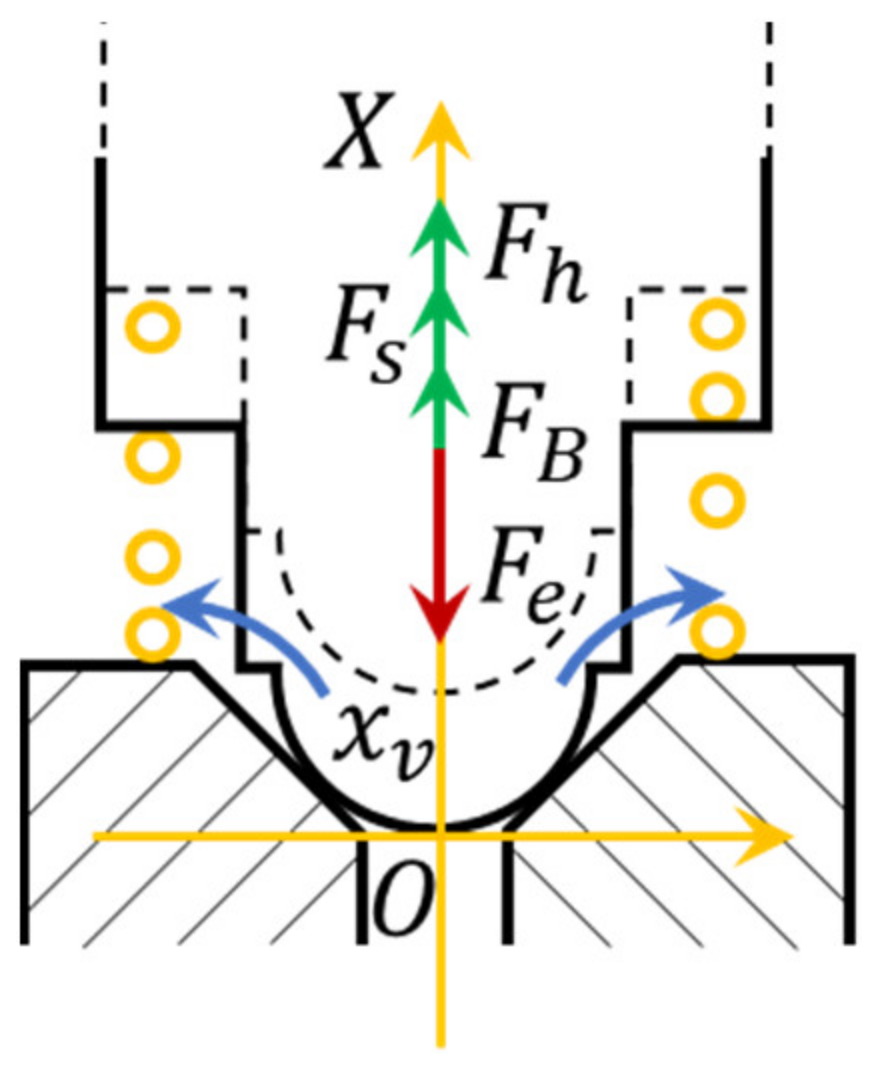
4.2.1. Parameter Optimization of Mechanical Valve
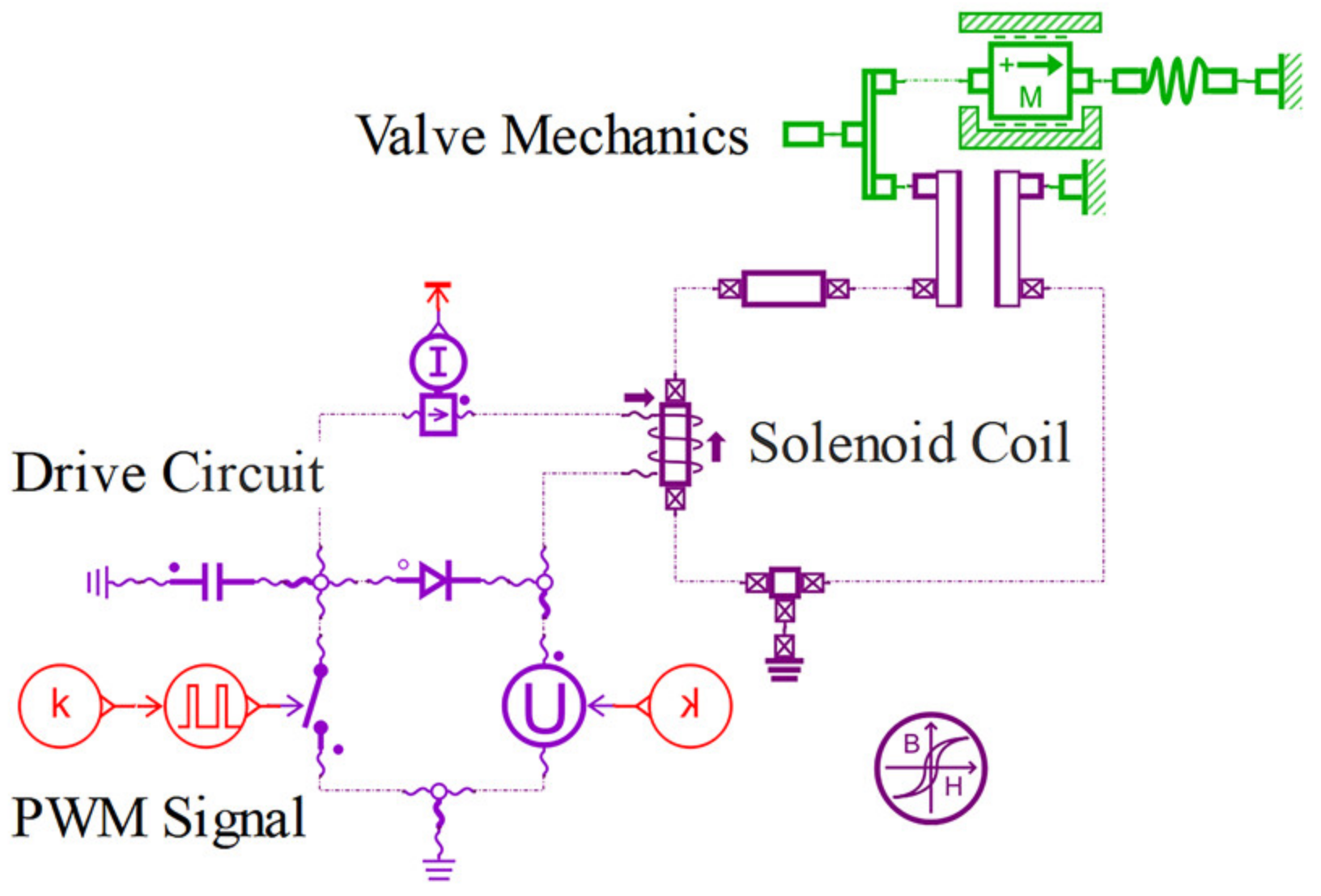
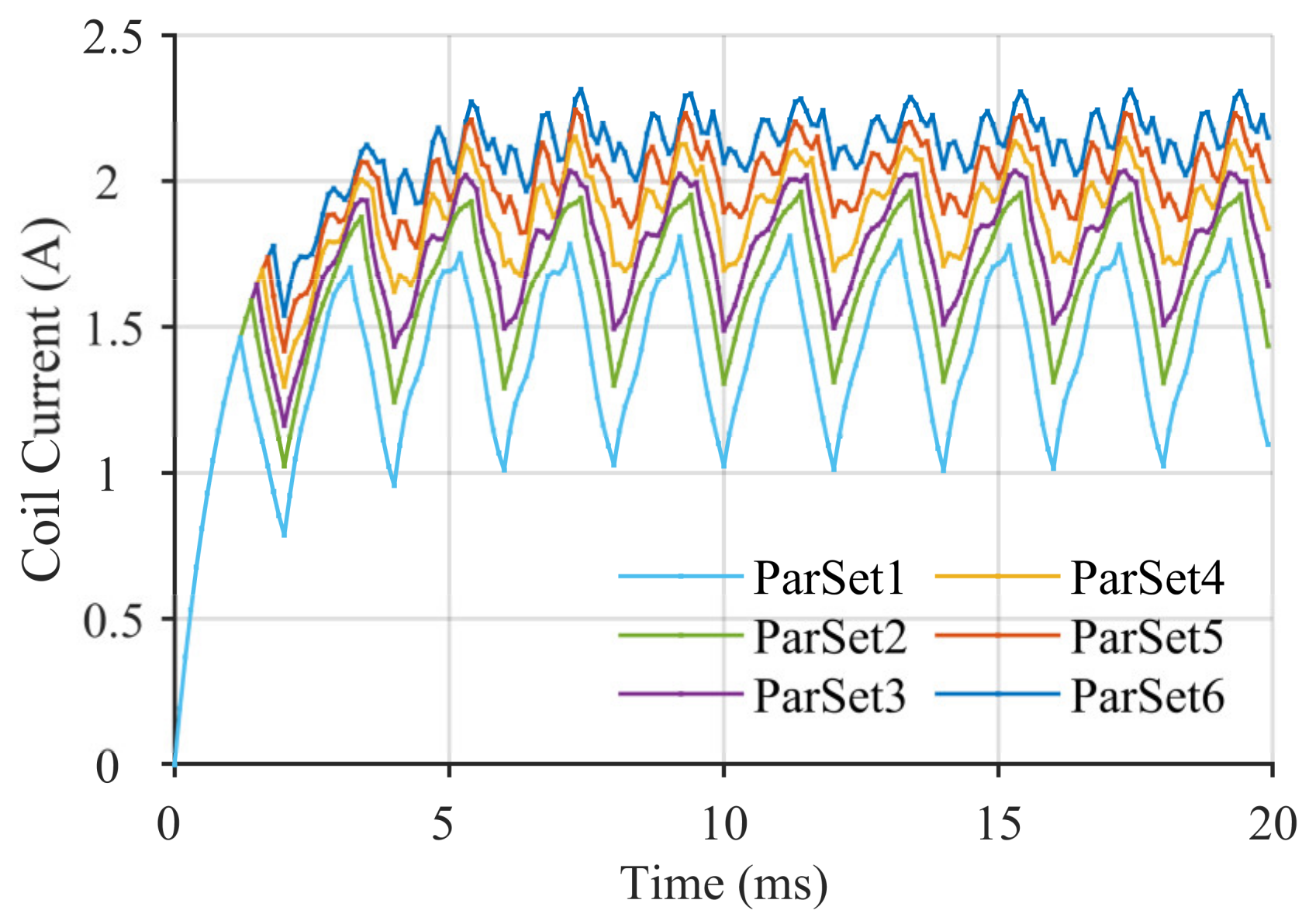
4.2.2. Parameter Optimization of Electrical Coil
5. Experimental Verification and Discussion
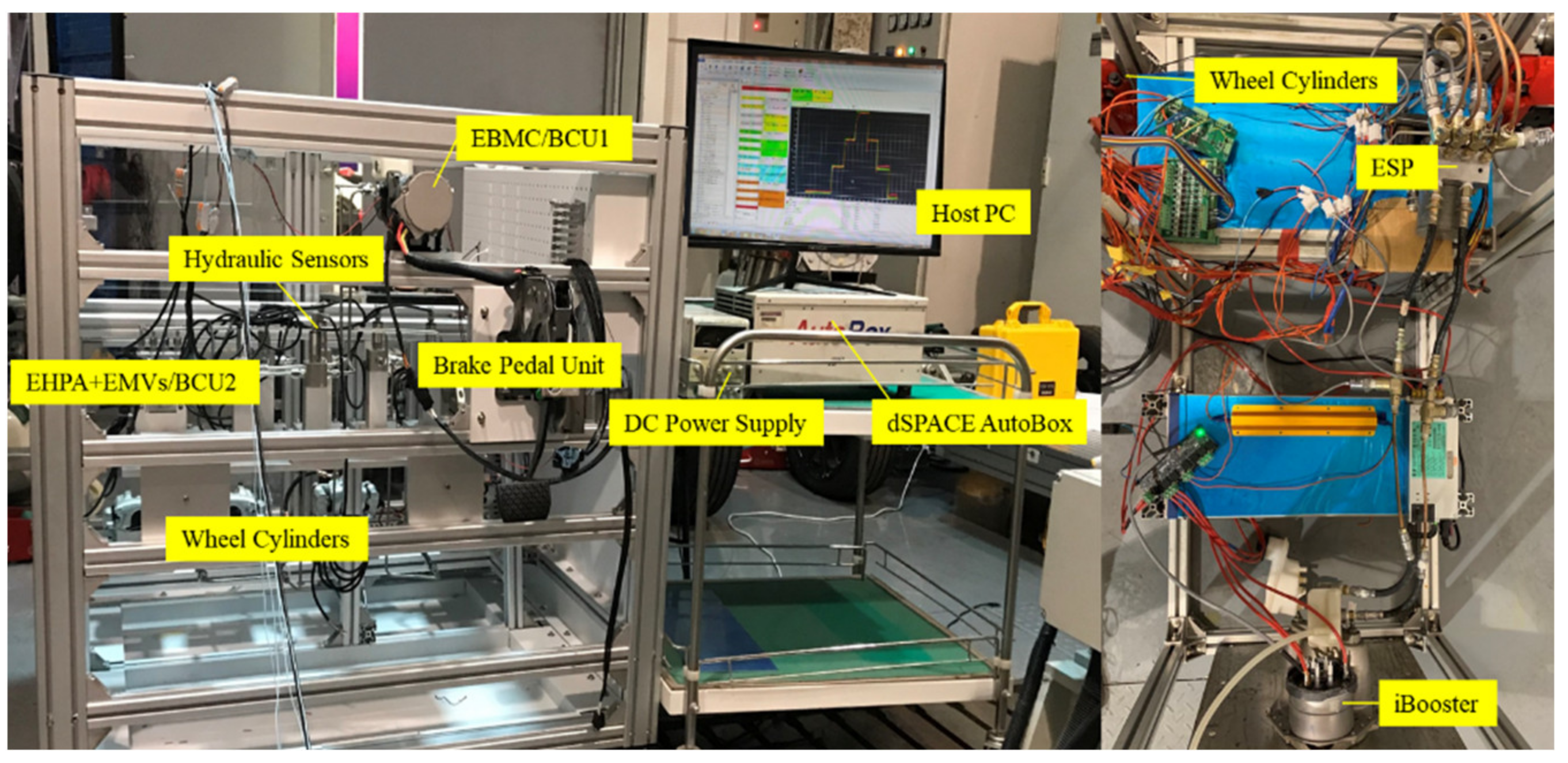
5.1. Prototype of the DREHB System
5.2. Experimental Tests in Typical Braking Scenarios
5.2.1. EBMC Braking Test
5.2.2. LSVs Braking Test
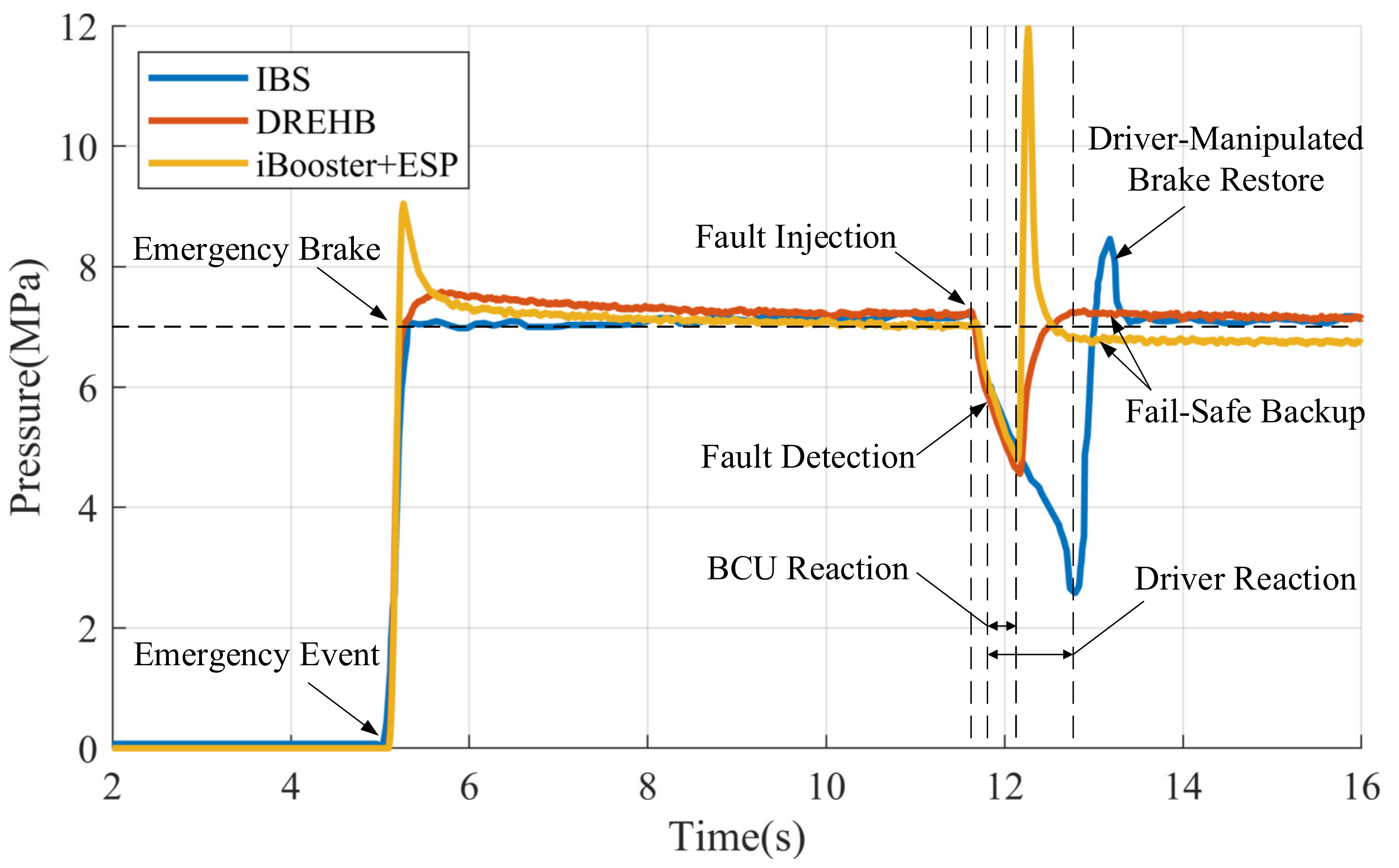
5.2.3. Fail-Safe Braking Test
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Dia, H. Rethinking urban mobility: Unlocking the benefits of vehicle electrification. In Decarbonising the Built Environment; Palgrave Macmillan: Singapore, 2019; pp. 83–98. [Google Scholar]
- Mohan, A.; Sripad, S.; Vaishnav, P.; Viswanathan, V. Trade-offs between automation and light vehicle electrification. Nat. Energy 2020, 5, 543–549. [Google Scholar] [CrossRef]
- Levinson, J.; Askeland, J.; Becker, J.; Dolson, J.; Held, D.; Kammel, S.; Kolter, J.Z.; Langer, D.; Pink, O.; Pratt, V. Towards fully autonomous driving: Systems and algorithms. In Proceedings of the 2011 IEEE Intelligent Vehicles Symposium (IV), Baden-Baden, Germany, 5–9 June 2011; pp. 163–168. [Google Scholar]
- Guo, J.; Li, W.; Wang, J.; Luo, Y.; Li, K. Safe and Energy-Efficient Car-Following Control Strategy for Intelligent Electric Vehicles Considering Regenerative Braking. IEEE Trans. Intell. Transp. Syst. 2021. Early Access. [Google Scholar] [CrossRef]
- Schram, R.; Williams, A.; van Ratingen, M. Implementation of Autonomous Emergency Braking (AEB), the next step in Euro NCAP’S safety assessment. ESV Seoul 2013, 13-0269. [Google Scholar]
- Han, K.; Lee, B.; Choi, S.B. Development of an antilock brake system for electric vehicles without wheel slip and road friction information. IEEE Trans. Veh. Technol. 2019, 68, 5506–5517. [Google Scholar] [CrossRef]
- Hasan, S.; Balador, A.; Girs, S.; Uhlemann, E. Towards emergency braking as a fail-safe state in platooning: A simulative approach. In Proceedings of the 2019 IEEE 90th Vehicular Technology Conference (VTC2019-Fall), Honolulu, HI, USA, 22–25 September 2019; pp. 1–5. [Google Scholar]
- Jonasson, M.; Thor, M. Steering redundancy for self-driving vehicles using differential braking. Veh. Syst. Dyn. 2018, 56, 791–809. [Google Scholar] [CrossRef]
- Kant, B. Sensotronic brake control (SBC). In Automotive Mechatronics: Automotive Networking, Driving Stability Systems, Electronics; Reif, K., Ed.; Springer Fachmedien Wiesbaden: Wiesbaden, Germany, 2015; pp. 412–415. [Google Scholar]
- Soga, M.; Shimada, M.; Sakamoto, J.-I.; Otomo, A. Development of vehicle dynamics management system for hybrid vehicles: ECB system for improved environmental and vehicle dynamic performance. JSAE Rev. 2002, 23, 459–464. [Google Scholar] [CrossRef]
- Lubischer, F.; Pickenhahn, J.; Gessat, J.; Gilles, L. Fuel savings through steering and braking technologies. ATZ Worldw. 2008, 110, 26–32. [Google Scholar] [CrossRef]
- Fausten, M.; Huck, T.; Rühle, A.; Baysal, T.; Kornhaas, R. Automated driving-Impacts on the vehicle architecture. In Proceedings of the 2015 Symposium on VLSI Technology (VLSI Technology), Kyoto, Japan, 16–18 June 2015; pp. C28–C31. [Google Scholar]
- Kunz, A.; Kunz, M.; Vollert, H.; Förster, M. Electromechanical brake booster for all drive concepts and automated driving. ATZ Worldw. 2018, 120, 58–61. [Google Scholar] [CrossRef]
- Ohtani, Y.; Innami, T.; Obata, T.; Yamaguchi, T.; Kimura, T.; Oshima, T. Development of an Electrically-Driven Intelligent Brake Unit; 0148–7191; SAE Technical Paper: Warrendale, PA, USA, 2011. [Google Scholar]
- Leiber, T.; Köglsperger, C.; Unterfrauner, V. Modular brake system with integrated functionalities. ATZ Worldw. eMagazine 2011, 113, 20–25. [Google Scholar] [CrossRef]
- Feigel, H.-J. Integrated brake system without compromises in functionality. ATZ Worldw. 2012, 114, 46–50. [Google Scholar] [CrossRef]
- Meyer, M.; Milot, D. Lightweight and compact braking system for fast deceleration. ATZ Worldw. 2017, 119, 26–29. [Google Scholar] [CrossRef]
- Ohkubo, N.; Matsushita, S.; Ueno, M.; Akamine, K.; Hatano, K. Application of electric servo brake system to plug-in hybrid vehicle. SAE Int. J. Passeng. Cars-Electron. Electr. Syst. 2013, 6, 255–260. [Google Scholar] [CrossRef]
- Vrábel, J.; Jagelčák, J.; Rievaj, V.; Caban, J. The quality of the brake components and its impact on the basic parameters of braking. Mach. Technol. Mater. 2014, 8, 6–8. [Google Scholar]
- Soltani, A.; Bagheri, A.; Azadi, S. Integrated vehicle dynamics control using semi-active suspension and active braking systems. Proc. Inst. Mech. Eng. Part K J. Multi-Body Dyn. 2018, 232, 314–329. [Google Scholar] [CrossRef]
- Samaranayake, L.; Longo, S. Degradation control for electric vehicle machines using nonlinear model predictive control. IEEE Trans. Control. Syst. Technol. 2017, 26, 89–101. [Google Scholar] [CrossRef]
- Wu, J.; Chen, P.; Zhao, J.; He, R. Active braking of an electronic brake booster facing intelligent automobile. Int. J. Perform. Eng. 2018, 14, 1735. [Google Scholar] [CrossRef] [Green Version]
- Mahrenholz, J.; Lumkes, J., Jr. Analytical coupled modeling and model validation of hydraulic on/off valves. J. Dyn. Syst. Meas. Control 2010, 132, 011005. [Google Scholar] [CrossRef]
- Passarini, L.; Nakajima, P. Development of a high-speed solenoid valve: An investigation of the importance of the armature mass on the dynamic response. J. Braz. Soc. Mech. Sci. Eng. 2003, 25, 329–335. [Google Scholar] [CrossRef]
- Khatir, S.; Wahab, M.A.; Boutchicha, D.; Khatir, T. Structural health monitoring using modal strain energy damage indicator coupled with teaching-learning-based optimization algorithm and isogoemetric analysis. J. Sound Vib. 2019, 448, 230–246. [Google Scholar] [CrossRef]
- Khatir, S.; Wahab, M.A. Fast simulations for solving fracture mechanics inverse problems using POD-RBF XIGA and Jaya algorithm. Eng. Fract. Mech. 2019, 205, 285–300. [Google Scholar] [CrossRef]
- Zhao, J.; Chen, Z.; Zhu, B.; Wu, J. Precise active brake-pressure control for a novel electro-booster brake system. IEEE Trans. Ind. Electron. 2019, 67, 4774–4784. [Google Scholar] [CrossRef]
- Ko, S.; Song, C.; Kim, H. Cooperative control of the motor and the electric booster brake to improve the stability of an in-wheel electric vehicle. Int. J. Automot. Technol. 2016, 17, 447–456. [Google Scholar] [CrossRef]
- Chen, J.-L.; Tseng, S.-K.; Liu, T.-H. Implementation of high-performance sensorless interior permanent-magnet synchronous motor control systems using a high-frequency injection technique. IET Electr. Power Appl. 2012, 6, 533–544. [Google Scholar] [CrossRef]
- Le-Huy, H.; Dessaint, L.A. An adaptive current control scheme for PWM synchronous motor drives: Analysis and simulation. IEEE Trans. Power Electron. 1989, 4, 486–495. [Google Scholar] [CrossRef]
- Li, C.; He, C.; Yuan, Y.; Zhang, J. Co-simulation on performance evaluation of a new electronic control hydraulic braking system. In Proceedings of the 2018 IEEE 3rd Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chongqing, China, 12–14 October 2018; pp. 2500–2504. [Google Scholar]
- Yuan, Y.; Zhang, J.; Li, Y.; Li, C. A novel regenerative electrohydraulic brake system: Development and hardware-in-loop tests. IEEE Trans. Veh. Technol. 2018, 67, 11440–11452. [Google Scholar] [CrossRef]
- Zhang, J.; Lv, C.; Yue, X.; Li, Y.; Yuan, Y. Study on a linear relationship between limited pressure difference and coil current of on/off valve and its influential factors. ISA Trans. 2014, 53, 150–161. [Google Scholar] [CrossRef] [PubMed]
- Li, J.; Ding, M.; Yong, W.; Li, C. Evaluation and optimization of the nonlinear flow controllability of switch valve in vehicle electro-hydraulic brake system. IEEE Access 2018, 6, 31281–31293. [Google Scholar] [CrossRef]
- Zhao, X.; Li, L.; Song, J.; Li, C.; Gao, X. Linear control of switching valve in vehicle hydraulic control unit based on sensorless solenoid position estimation. IEEE Trans. Ind. Electron. 2016, 63, 4073–4085. [Google Scholar] [CrossRef]
- Yuan, Y.; Zhang, J. A Novel Initiative Braking System With Nondegraded Fallback Level for ADAS and Autonomous Driving. IEEE Trans. Ind. Electron. 2019, 67, 4360–4370. [Google Scholar] [CrossRef]
- Yu, Z.; Xu, S.; Xiong, L.; Han, W. An Integrated-Electro-Hydraulic Brake System for Active Safety; 0148–7191; SAE Technical Paper: Warrendale, PA, USA, 2016. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Definition | Value |
|---|---|---|
| Maximum hydraulic pressure of master cylinder | 12.0 MPa | |
| Maximum hydraulic pressure increasing rate | 20.0 MPa | |
| Maximum hydraulic pressure decreasing rate | 25.0 MPa/s |
| Parameter Name | Value | Parameter Name | Value |
|---|---|---|---|
| Brake fluid density | 850 kg/m3 | Brake fluid viscosity | 42.5 mm2/s |
| Bulk modulus of fluid | 1700 MPa | Temperature of fluid | 40 °C |
| Piston diameter | 35 mm | Piston mass | 0.5 kg |
| Brake disc clearance | 0.25 mm | Spring stiffness | 2.5 × 106 N/m |
| Damping coefficient | 1.1 × 107 Ns/m | Max flow coefficient | 0.7 |
| Parameter Set | Values | Parameter Set | Values |
|---|---|---|---|
| ParSet1 | 22/26 mm/30 mm | ParSet5 | 15/22 mm/26 mm |
| ParSet2 | 20/24 mm/28 mm | ParSet6 | 25/28 mm/30 mm |
| ParSet3 | 18/22 mm/28 mm | ParSet7 | 22/24 mm/28 mm |
| ParSet4 | 14/22 mm/26 mm | ParSet8 | 16/24 mm/28 mm |
| Parameter Set | Values | Parameter Set | Values |
|---|---|---|---|
| ParSet1 | 2.4 mm/52°/0.89 A | ParSet5 | 2.0 mm/49°/0.89 A |
| ParSet2 | 2.4 mm/51°/0.89 A | ParSet6 | 1.8 mm/48°/0.89 A |
| ParSet3 | 2.2 mm/50°/0.89 A | ParSet7 | 1.8 mm/47°/0.89 A |
| ParSet4 | 2.0 mm/50°/0.89 A | ParSet8 | 1.5 mm/47°/0.89 A |
| Parameter Set | Values | Parameter Set | Values |
|---|---|---|---|
| ParSet1 | 420/60% | ParSet4 | 600/75% |
| ParSet2 | 500/60% | ParSet5 | 700/75% |
| ParSet3 | 500/70% | ParSet6 | 750/80% |
| Sine Test | RMSE | |
|---|---|---|
| 3.0 MPa | 12.6/0.08/0.002 | 0.27 MPa |
| 7.0 MPa | 15.2/0.11/0.001 | 0.21 MPa |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, C.; Zhang, J.; Hou, X.; Ji, Y.; Han, J.; He, C.; Hao, J. A Novel Double Redundant Brake-by-Wire System for High Automation Driving Safety: Design, Optimization and Experimental Validation. Actuators 2021, 10, 287. https://doi.org/10.3390/act10110287
Li C, Zhang J, Hou X, Ji Y, Han J, He C, Hao J. A Novel Double Redundant Brake-by-Wire System for High Automation Driving Safety: Design, Optimization and Experimental Validation. Actuators. 2021; 10(11):287. https://doi.org/10.3390/act10110287
Chicago/Turabian StyleLi, Chao, Junzhi Zhang, Xiaohui Hou, Yuan Ji, Jinheng Han, Chengkun He, and Jiangmai Hao. 2021. "A Novel Double Redundant Brake-by-Wire System for High Automation Driving Safety: Design, Optimization and Experimental Validation" Actuators 10, no. 11: 287. https://doi.org/10.3390/act10110287
APA StyleLi, C., Zhang, J., Hou, X., Ji, Y., Han, J., He, C., & Hao, J. (2021). A Novel Double Redundant Brake-by-Wire System for High Automation Driving Safety: Design, Optimization and Experimental Validation. Actuators, 10(11), 287. https://doi.org/10.3390/act10110287