4.1. Soil-Structure Interaction by Means of Elastic Concentrated Springs
The dynamic behaviour of a structure can be modified by the presence of a deformable soil. As well-known, a flexibly-supported structure has a fundamental period longer than the period T of the corresponding fixed-base structure, and a higher damping due to energy dissipated into the soil through wave radiation. This latter phenomenon is inhibited in rigidly-supported structures.
The influence of the subsoil on the main frequencies of the building depends on features of the soil, generally synthesized by the value of shear wave velocity,
Vs and of the structure, generally represented by its stiffness and height. In literatures [
29,
30,
31], several analyses evidenced that the influence of SSI on the dynamic behaviour of a structure essentially depends on the relative stiffness (and mass) of the superstructure compared to that of the soil interacting with the building. In short, the effects of SSI can be relevant for massive and stiff superstructures compared to the foundation soil and also for slender and tall buildings, like towers, in very soft soils [
32].
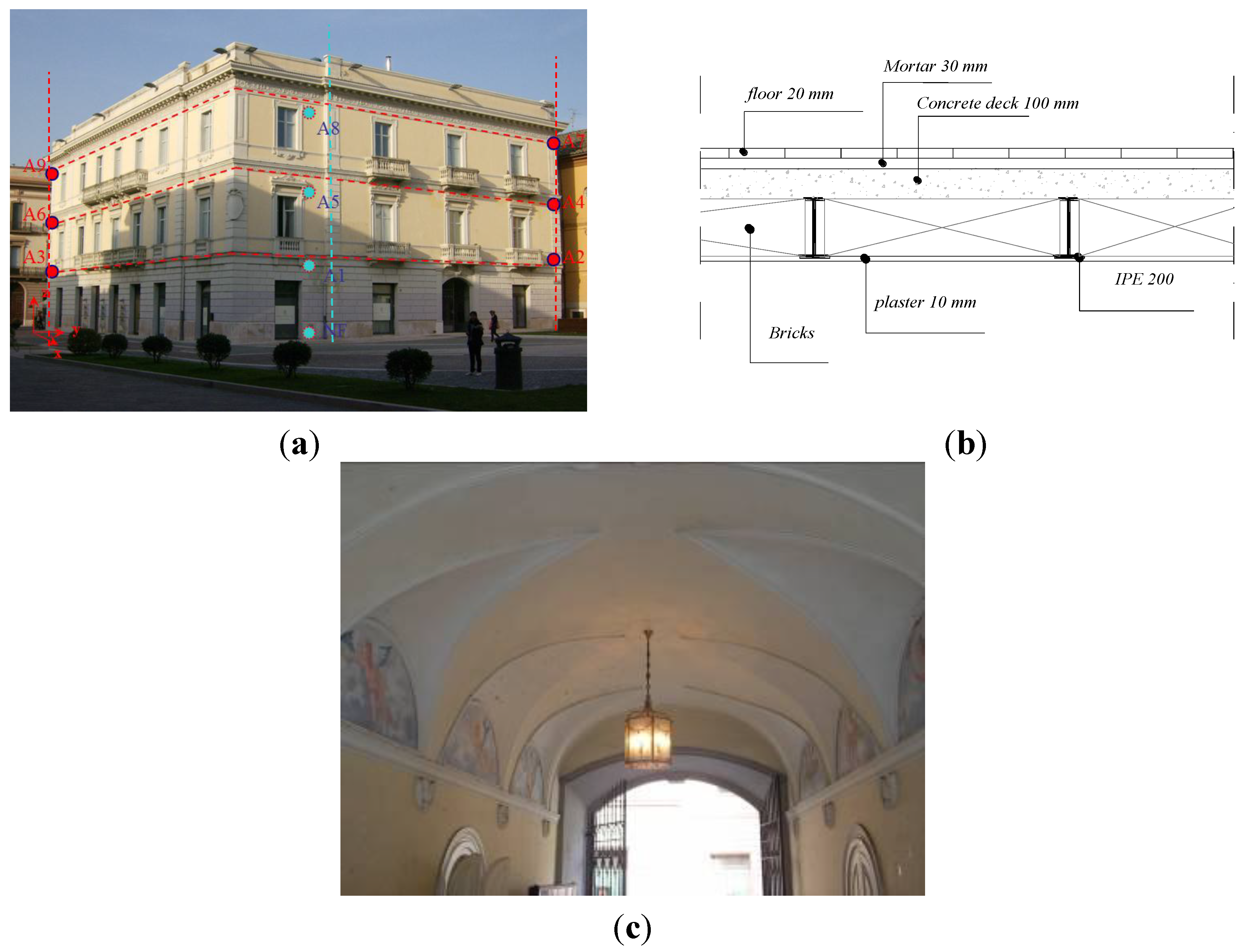
In the case of Palazzo Bosco, the subsoil interacting with the building is enough stiff but, in principle, not a rock (conventionally, in geotechnical earthquake engineering it is considered “rock” a material with
Vs > 800 m/s), as the first 12 m below the ground level have lower values of
Vs (in
Section 2 an average value of 600 m/s has been estimated).
A traditional approach for the assessment of SSI in the dynamic field consists in introducing to the structural model of the building the effect of both soil and foundation system by means of concentrated rotational and translational springs placed at the structure base, which becomes in this way no more fixed. These springs are complex functions (impedances) whose real part (stiffness) depends on soil shear stiffness,
G, and Poisson ratio, υ, foundation geometry, and frequency of excitation, ω [
30].
In general, the impedance functions
ki depend on frequency ω of the input motion and can be expressed multiplying the static stiffness,
Ki, by a frequency-dependent coefficient, α
i [
30]:
For the estimation of the foundation impedances, in [
30] different analytical expressions and/or charts are provided, depending on the shear stiffness,
G, and the Poisson coefficient,
ν, of the soil, the geometrical characteristics of the foundation (and the frequency, ω of the input motion. In [
31], a state-of-the-art about different formulas proposed in literature for the evaluation of SSI is reported, taking into account: (1) the shape of the foundation (circular, strip, rectangular/square foundation); (2) the soil model (homogeneous half-space, soil layer over rock); and (3) the foundation embedment (foundation placed on the limit surface of the half-space or embedded in it).
It is worth noting that the available closed-form solutions have been all obtained assuming a linear elastic response of the foundation soil. This assumption on soil behaviour is reliable when low levels of strain are involved, as in the case of vibrations due to low-amplitude excitations (environmental actions). For strong earthquakes, however, soil non-linearity should be accounted for, which induces a decrease in soil stiffness with respect to the initial value G0 (derived from the shear wave velocity Vs).
4.2. The Finite Element Models
The examined building has been numerically studied by a three-dimensional Finite Element model made of shell elements (software SAP2000, release 14, CSI, Berkeley, CA, USA). The three floors have been modelled by rigid connection between all the nodes belonging to each plane, which are constrained against in-plane deformations (hypothesis of rigid floor).
The vertical loads were defined with respect to the actual loading conditions of the building at the moment of the trial tests. For the permanent and variable load, respectively, the values Gk = 5.00 kN/m2 and Qk = 0.25 kN/m2 have been assumed. The low value of the considered variable load is due to suspension of teaching activities in the classrooms during the dynamic testing. The dead load of the steel roof has been estimated to be 1.75 kN/m2. All the vertical loads related to the floors have been directly applied on the top of the masonry walls supporting the floors.
Based on the values of unit weight of the single blocks and on the masonry texture and considering the presence of the reinforced plaster layer, for the first and second floors the unit weight of the masonry has been estimated to be about 20 kN/m
3. Analogously, for the irregular masonry of the ground and underground floor, the unit weight has been assumed as 24 kN/m
3. More details about the assessment of unit weight can be found in [
24].
As no experimental data are available to characterize the masonry Young’s moduli, the indications of the applicative Italian code [
33,
34] (Appendix 8, Table C8A.2.1) were firstly adopted in previous analyses [
24] and then modified. The estimation of the Young’s modulus is, indeed, an open problem since the uncertainty and variability of E, also within the same type of stone, can be usually very high (CoV can be also greater than 40% [
35]). Detailed sensitivity analyses about the effect of
E on the numerical frequencies of the examined building in the linear field have been already carried out in [
24] and evidenced that a variation of
E of 50% leads to a variation of frequencies of about 25%. Since in this paper, attention is mainly focused on the assessment of soil deformability on the dynamic behaviour of the examined building, in the analyses here reported the Young’s modulus of masonry has not been varied. In particular, the values already established in [
24] have been assumed:
EG = 1850 MPa and
E1-2 = 1550 MPa for the ground level and for the upper levels, respectively.
Three FE models have been considered as the base restraints change in order to compare the experimental vs. numerically predicted behaviour of the buildings both in terms of main frequencies and vibration modes and check the effect of SSI.
In the first model, the underground level of the building is neglected and the ground floor is considered completely restrained at the base (fixed-base model).
In the second model, the underground level of the building has been added in the model assuming for the masonry walls a material having the same characteristics of the walls of the ground floor; its base (placed 3 m under the ground level) has been fully constrained as in the first model. Moreover, in this model the effect of soil around the walls of the underground level was neglected.
The FE model without the underground level is made of 16,895 elements, while the model with the underground level is made of 20,477 elements. In both cases, the maximum area of the finite elements is 0.25 m2.
Finally, a third model has been considered, in which the underground level has been neglected and a set of six concentrated linear springs (three translational and three rotational) has been imposed at the base of the ground floor of the building for taking into account Soil Structure Interaction. In this case, the nodes of the FE model belonging to the base of the building have been constrained in order to reproduce the effect of a stiff plate with respect to the in-plane and out-of-plane differential deformations. The concentrated springs have been positioned at this level, in correspondence to the centre of mass of the building. The spring values (
i.e., the foundation impedances) have been computed according to the analytical expressions of [
30], considering the scheme of a rectangular foundation embedded in an elastic half-space. The following parameters have been adopted for the foundation soil: density ρ = 2000 kg/m
3, Poisson’s ratio
ν = 0.3, shear waves velocity
Vs = 600 m/s. This latter parameter—as stated above–represents the average value of
Vs in the significant soil volume interacting with the building. In the third model, the underground level of the building has not been modelled, but its presence has been however taken into account in the spring stiffness values, since the foundation depth,
D, below the ground level and the height,
d, of the sidewall in effective contact with the surrounding soil have been assumed both equal to 3 m, that is the height of the underground level.
The use of such a modelling approach has been found to be more suitable than modelling also the underground floor and applying at its base the springs. In fact, the effect of confinement due to the lateral soil is introduced in the model by taking into account the foundation embedment.
4.3. Numerical Dynamic Behaviour of the Building
The dynamic behaviour of the building in the elastic field has been numerically investigated by the 3D FE models described above by means of linear modal analyses.
In
Table 2 periods, frequencies, and modal participating mass ratios associated to the first seven (in order to achieve a total mass participant at least 75% in both directions
X and
Y) vibration modes of the building are reported.
Table 2.
Period, frequencies and modal participating mass ratios for the fixed-base Finite Element (FE) model of the building.
Table 2.
Period, frequencies and modal participating mass ratios for the fixed-base Finite Element (FE) model of the building.
| Mode | Period | Frequency | Translation (−) | Rotation (−) |
|---|
| T (s) | f (Hz) | X | Y | Z | RX | RY | RZ |
|---|
| 1 | 0.213 | 4.70 | 0.00 | 0.70 | 0.00 | 0.30 | 0.00 | 0.26 |
| 2 | 0.195 | 5.13 | 0.38 | 0.01 | 0.00 | 0.00 | 0.11 | 0.45 |
| 3 | 0.173 | 5.79 | 0.31 | 0.00 | 0.00 | 0.00 | 0.09 | 0.01 |
| 4 | 0.081 | 12.36 | 0.00 | 0.04 | 0.00 | 0.01 | 0.00 | 0.02 |
| 5 | 0.077 | 12.97 | 0.00 | 0.07 | 0.00 | 0.04 | 0.00 | 0.02 |
| 6 | 0.076 | 13.15 | 0.05 | 0.00 | 0.16 | 0.11 | 0.00 | 0.03 |
| 7 | 0.072 | 13.89 | 0.02 | 0.00 | 0.51 | 0.24 | 0.42 | 0.02 |
| Sum participating mass | 0.76 | 0.82 | 0.67 | - | - | - |
The first eigenfrequency of the building is related to a vibration mode with a participating mass ratio of 70% and is completely translational in
Y direction as it can be evidenced by the deformed shape depicted in
Figure 6a. The deformed shapes of the building corresponding to the second and third modes (see
Figure 6b,c) show a torsional shape of the building, with a prevalent translational component in
X direction as evidenced by the participating mass ratios of 38% and 31%, respectively.
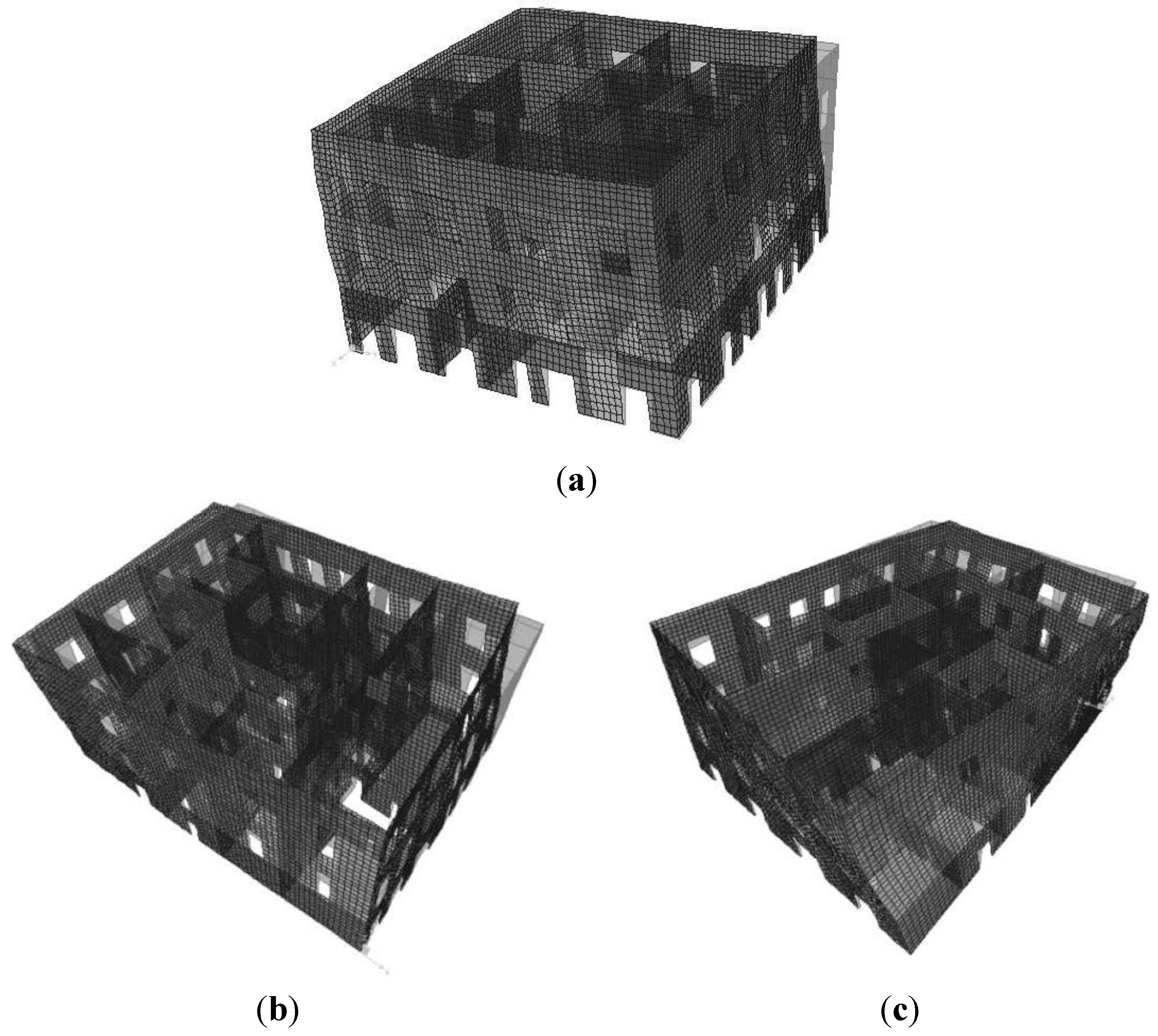
Figure 6.
Main vibration modes of the structure in the fixed-base FE model: (a) First mode; (b) Second mode; (c) Third mode.
Figure 6.
Main vibration modes of the structure in the fixed-base FE model: (a) First mode; (b) Second mode; (c) Third mode.
As highlighted by the experimental results too, the numerical frequency in
Y direction (4.7 Hz) is slightly lower (about −10%) than the second and third frequencies characteristic of the
X direction (5.13 and 5.79 Hz), that confirms the tendency of the building to be more deformable in the direction
Y parallel to the shorter side (see plan in
Figure 2a).
The higher numerical modes are characterized by very low participating mass ratios and the deformed shapes of the building show that they are local modes, since they regard single walls.
When the underground level is added to the fixed-base model, the deformability of the structure clearly increases, with an increment of about 16% and 12% in the first vibration period along the
Y and
X direction, respectively, as reported in
Table 3 for the second model.
The first three vibration modes are similar to the ones of the fixed-base model (model 1), even if some differences in the mass participating can be observed (i.e., the mass participating in X direction increases in the second mode and decreases in the third). Moreover, a fourth and a fifth mode in Y and X direction, respectively, are better identified in this model, but they are characterised by a low amount of mass participating (15% and 12%) and, thus, they can be considered as local modes.
Table 3.
Period, frequencies and modal participating mass ratios for the FE model of the building with the underground floor.
Table 3.
Period, frequencies and modal participating mass ratios for the FE model of the building with the underground floor.
| Mode | Period | Frequency | Translation (−) | Rotation (−) |
|---|
| T (s) | f (Hz) | X | Y | Z | RX | RY | RZ |
|---|
| 1 | 0.249 | 4.02 | 0.00 | 0.66 | 0.00 | 0.25 | 0.00 | 0.26 |
| 2 | 0.220 | 4.55 | 0.44 | 0.00 | 0.00 | 0.00 | 0.11 | 0.37 |
| 3 | 0.196 | 5.10 | 0.21 | 0.00 | 0.00 | 0.00 | 0.06 | 0.02 |
| 4 | 0.094 | 10.65 | 0.00 | 0.15 | 0.00 | 0.04 | 0.00 | 0.06 |
| 5 | 0.088 | 11.40 | 0.12 | 0.00 | 0.03 | 0.03 | 0.01 | 0.06 |
| 6 | 0.083 | 12.02 | 0.00 | 0.00 | 0.07 | 0.07 | 0.03 | 0.00 |
| 7 | 0.083 | 12.08 | 0.01 | 0.00 | 0.54 | 0.26 | 0.34 | 0.01 |
| Sum participating mass | 0.78 | 0.81 | 0.64 | - | - | - |
For the third model, characterized by the concentrated springs placed under the ground level, periods, frequencies, and modal participating mass ratios associated to the first seven vibration modes, are reported in
Table 4. The overall effect of the soil–foundation interaction can be assumed as comprehensive of the part of the building that interacts with the soil both laterally and under the structure.
Table 4.
Period, frequencies and modal participating mass ratios for the FE model with concentrated springs.
Table 4.
Period, frequencies and modal participating mass ratios for the FE model with concentrated springs.
| Mode | Period | Frequency | Translation (−) | Rotation (−) |
|---|
| T (s) | f (Hz) | X | Y | Z | RX | RY | RZ |
|---|
| 1 | 0.224 | 4.45 | 0.00 | 0.72 | 0.00 | 0.32 | 0.00 | 0.27 |
| 2 | 0.203 | 4.92 | 0.50 | 0.00 | 0.00 | 0.00 | 0.15 | 0.41 |
| 3 | 0.179 | 5.57 | 0.21 | 0.00 | 0.00 | 0.00 | 0.07 | 0.03 |
| 4 | 0.090 | 11.07 | 0.00 | 0.00 | 0.86 | 0.46 | 0.44 | 0.00 |
| 5 | 0.085 | 11.72 | 0.00 | 0.08 | 0.00 | 0.01 | 0.00 | 0.04 |
| 6 | 0.082 | 12.18 | 0.00 | 0.04 | 0.00 | 0.03 | 0.00 | 0.01 |
| 7 | 0.081 | 12.39 | 0.08 | 0.00 | 0.02 | 0.00 | 0.17 | 0.04 |
| Sum participating mass | 0.79 | 0.84 | 0.88 | - | - | - |
The first vibration mode shows again a well-defined translational modal shape in
Y direction (
Figure 7a) with a participating mass ratio (72%) lightly higher than the value achieved in the fixed-base scheme (70%, fixed-base Model 1). As in the previous models, the second and third modes evidence a slightly torsional shape of the building, with a prevalent translational component in
X direction (
Figure 7b,c), even if for the second mode the participating mass ratio in
X direction further increases (50%
vs. 38% of the fixed-base Model 1), while in the third mode it reduces (21%
vs. 30%).
The presence of springs leads to a reduction of the frequencies, i.e., an increase of the period of about 5% and 4% for the first and the second vibration mode, respectively, compared to the values predicted by fixed-base Model 1.
Figure 7.
Main vibration modes of the structure in the FE model with concentrated springs at the base: (a) First mode; (b) Second mode; (c) Third mode.
Figure 7.
Main vibration modes of the structure in the FE model with concentrated springs at the base: (a) First mode; (b) Second mode; (c) Third mode.
A singularity of the dynamic behaviour of the building modelled with springs is that the fourth mode is characterized by a vertical deformation along the Z direction with a high ratio of participating mass (86%); this mode is clearly caused by the presence of the springs that introduce the possibility of a translation in the Z direction.
The fifth and the sixth mode show again a very low participating mass along the Y direction and, thus, they can be considered as local.
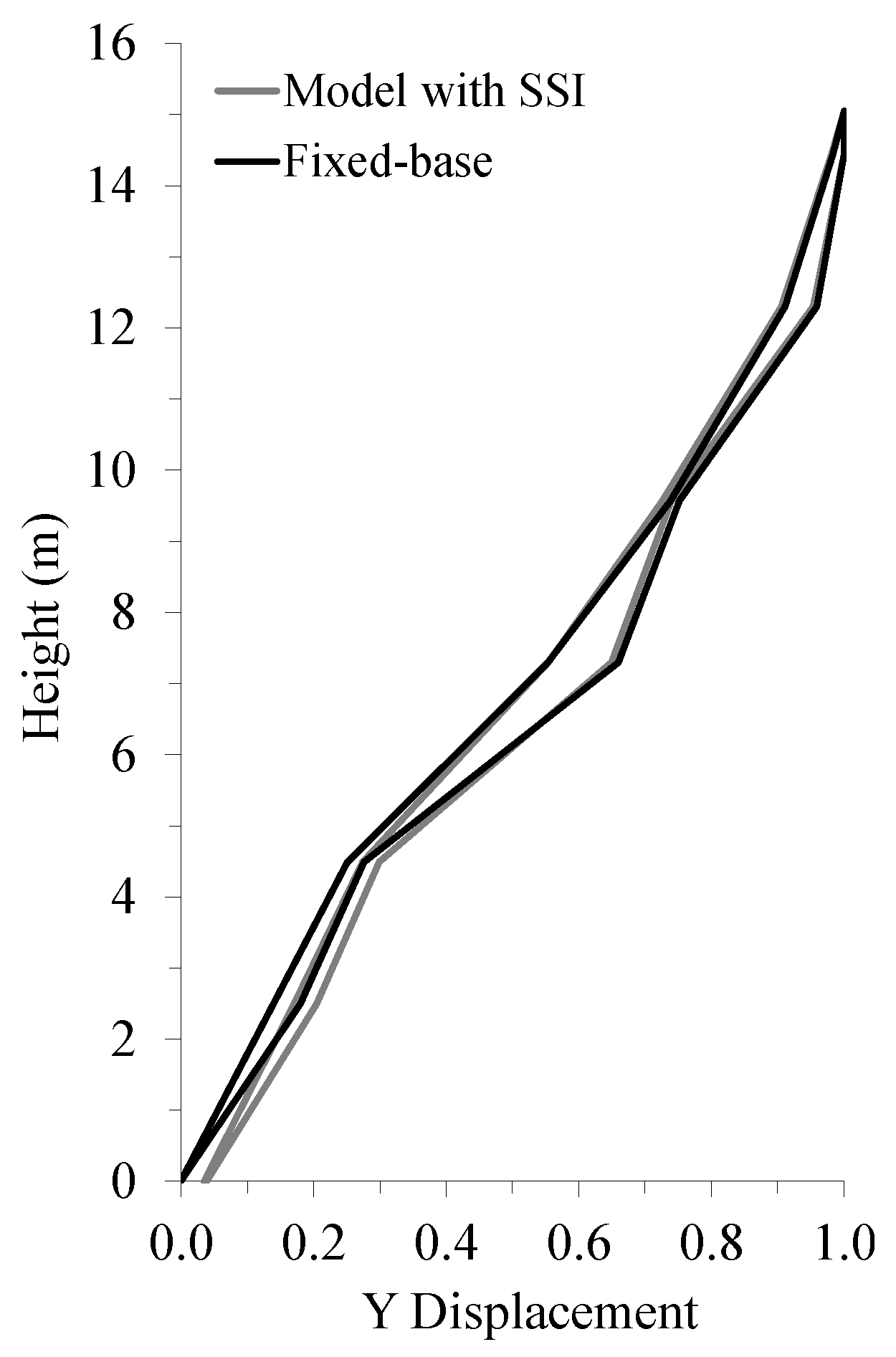
In
Figure 8, the first vibration modes in
Y direction given by the fixed-base model and the model with springs are compared considering the displacement along the
Y direction of the vertical lines at the corners. Since the building has a rectangular plan and is not very tall, the modal shapes cannot be represented by only one vertical and, thus, the deformations along the four corners of the building were plotted. In particular, in
Figure 8, the two lines for each model (black lines for the fixed-base and grey lines for the model with SSI) represent the envelope lines (minimum and maximum displacements) of the numerical modal shapes evaluated at each corner of the building. In the model with the springs, the displacements are not zero at the basement due to the presence of the springs; this initial offset dampens along the height and, however, the modal shapes furnished by the two models are quite similar.
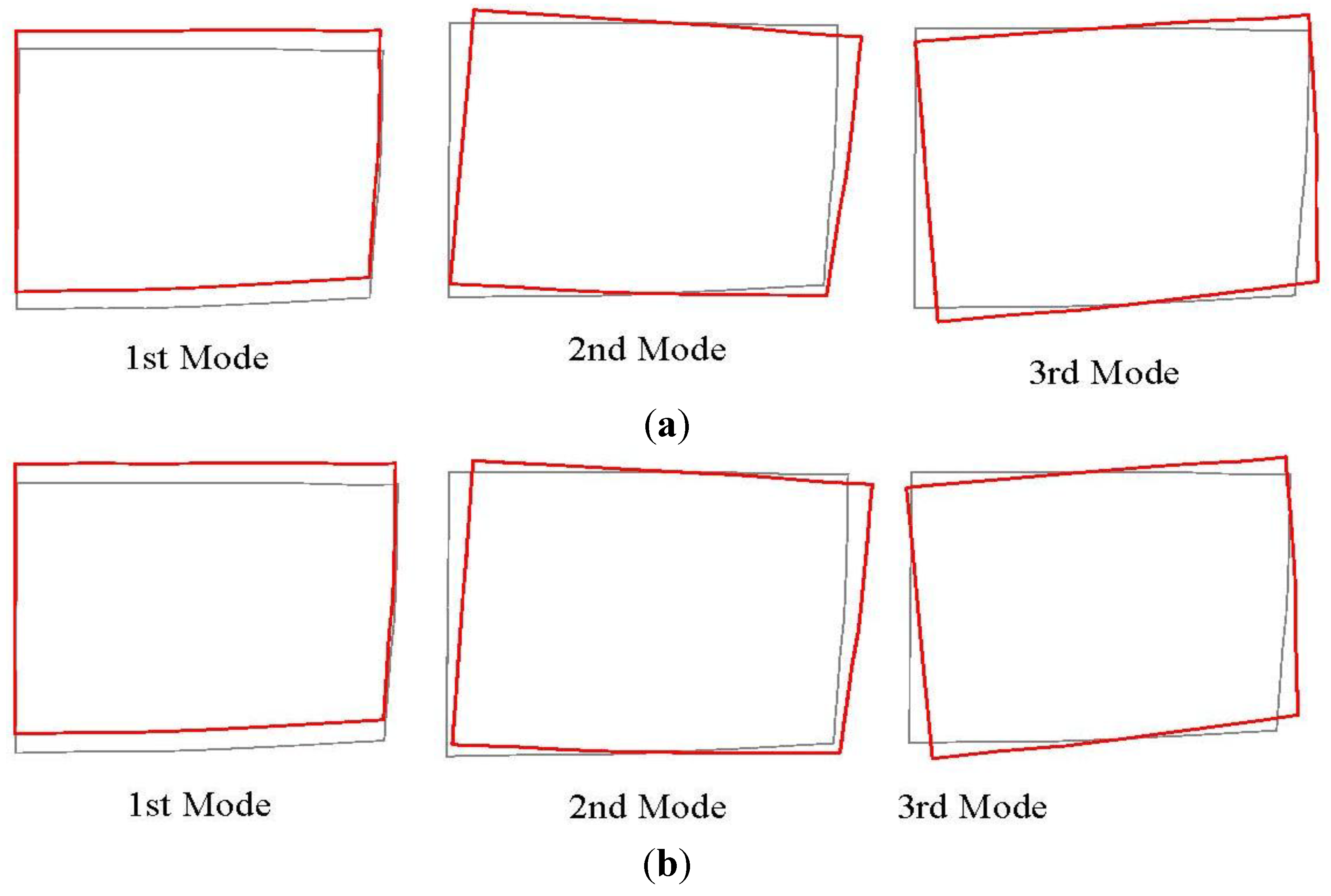
To have more exhaustive comparisons, the first three vibration modes of the fixed-base model and the model with springs have been compared with respect of the positions identified in the plan of the building by the four corners of the structure. In particular, the original and the deformed position of the top of the structure is represented in the pictures reported in
Figure 9.
Figure 9 shows again that the modes associated to the first two frequencies are translational in direction
Y for both models and that the second and the third modes are not only translational in direction
X.
Figure 8.
Comparison between the first modal shapes (Y direction) at the corners of the building given by the fixed-base model and the model with concentrated springs at the base.
Figure 8.
Comparison between the first modal shapes (Y direction) at the corners of the building given by the fixed-base model and the model with concentrated springs at the base.
Figure 9.
Comparison between the first three numerical vibration modes of the structure given by: (a) The fixed-base model; (b) The model with concentrated springs at the base.
Figure 9.
Comparison between the first three numerical vibration modes of the structure given by: (a) The fixed-base model; (b) The model with concentrated springs at the base.
4.4. Comparison of Linear Dynamic Analysis with Experimental Results
The comparison of the first experimental frequency (4.3 Hz in Y direction) with the first numerical one given by the fixed-base model (4.70 Hz) shows a difference of about 10%. This difference reduces to only 3% in the model with the springs (4.45 Hz) pointing out that there could be an effect of the SSI in making the building more deformable and, thus, more similar to the experimental behavior. Clearly, this is true, if the elastic properties and unit weight of the materials and geometry and loads acting on the structure have been correctly assessed.
About the
X direction, all the FE models have provided two frequencies (the second and the third) very close to each other (
i.e., 5.13 and 5.79 Hz for the fixed base model and 4.92 and 5.57 Hz in the FE model with springs) and characterized by different participating mass (38% and 31% for the Model 1 and 50% and 21% for Model 3 with springs). The second experimental frequency in
X direction (4.7 Hz) is comparable with the values of the second numerical frequency in
X direction and, as occurred for the
Y direction, is again closer to the value predicted by the model with springs (4.92 Hz). On the contrary, the third numerical frequency in
X direction does not correspond to any experimental values and could be related to type of finite element used in the modelling strategy. Similar linear dynamic analysis carried out by a different FE model made of brick elements instead of shell [
24] furnished, indeed, slightly different results, since only one frequency was individuated in
X direction corresponding to a pure translational vibration mode very similar to the one detected in
Y direction and with the same participating mass. This result, joined to the regularity of the building and to the results of the
in situ dynamic tests that allowed identifying only two clear uncoupled translational modes in direction
Y and
X (phase equal to 0), would confirm that the third numerical frequency is not realistic, but has to be attributed to the second mode. Moreover, a confirmation of this hypothesis is the fact that the sum of the participating mass for second and third modes in
X direction is comparable with the mass participating associated to the first frequency in
Y direction (71%
vs. 72% for the model with springs).
In
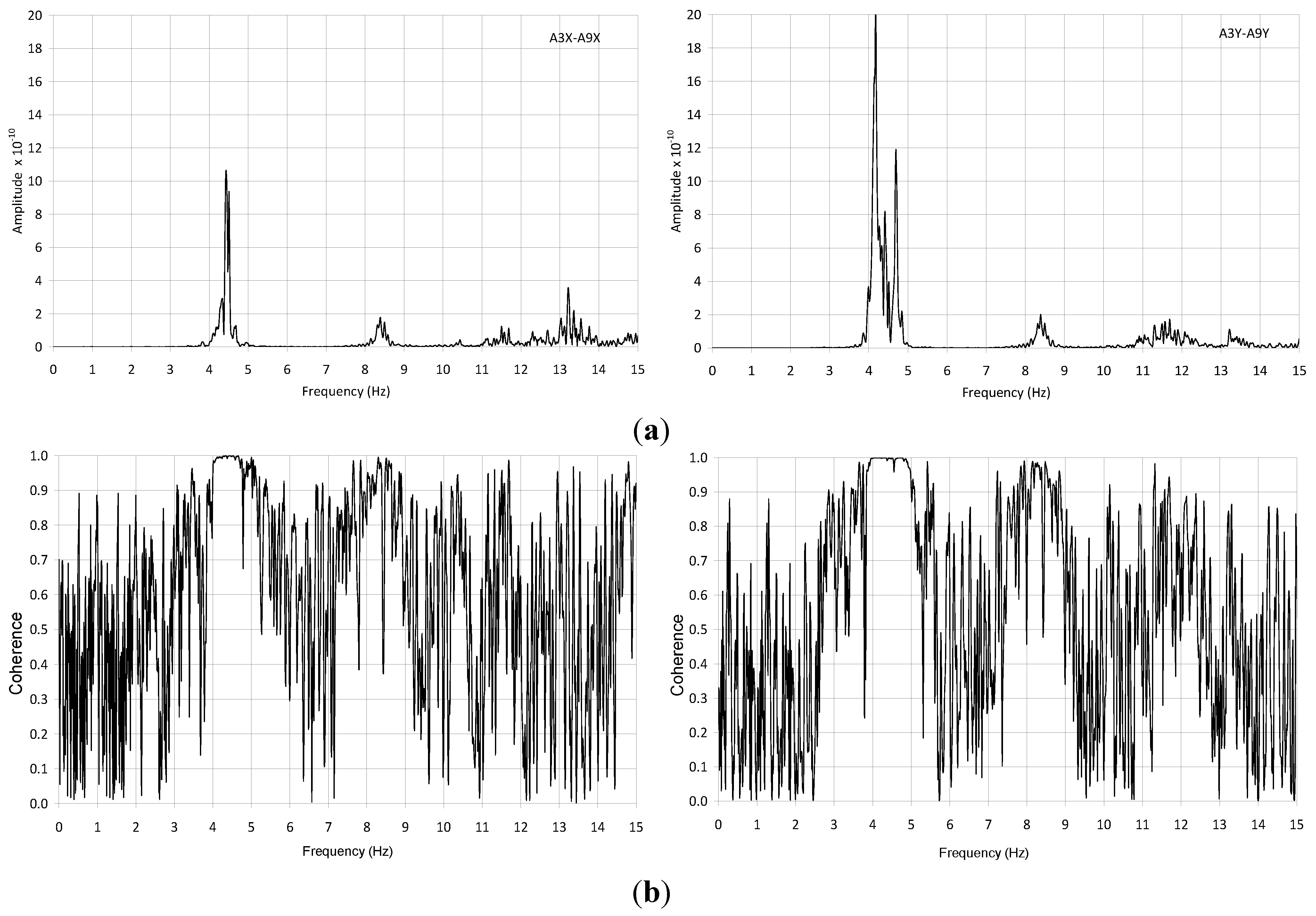
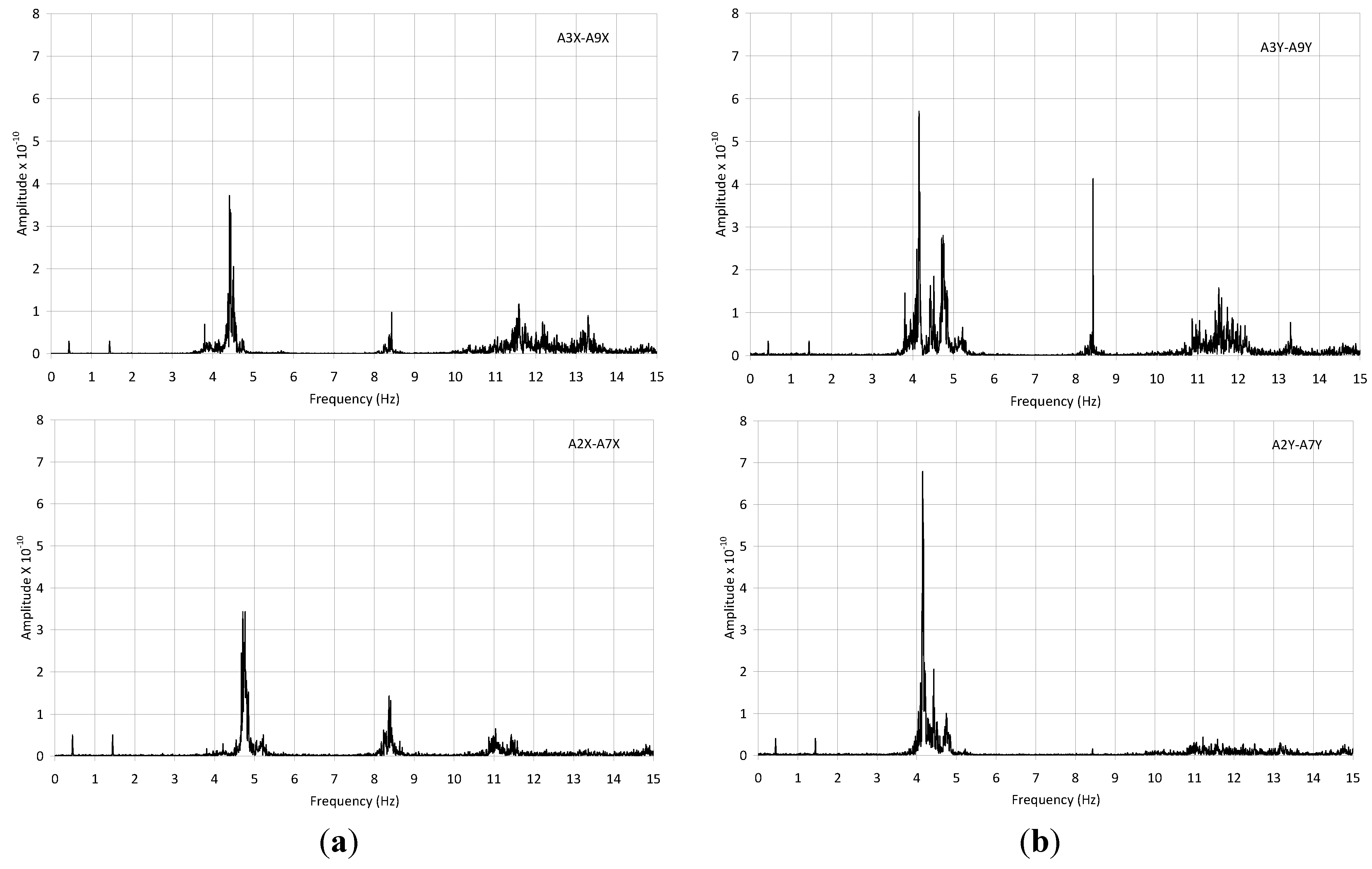
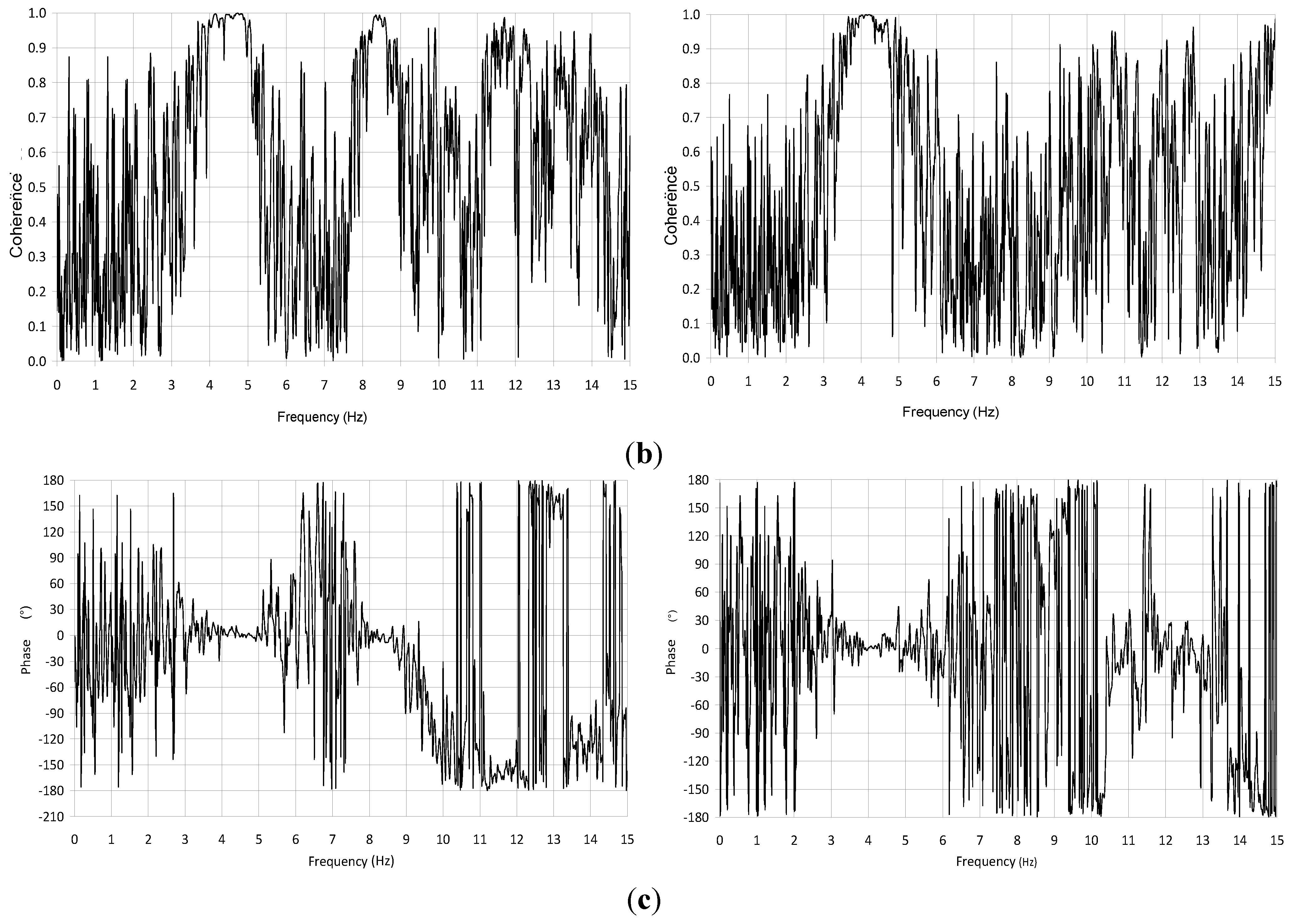
Section 3.3, it was observed that only the first two frequencies can be reliably identified by means of the experimental measures, since both in
X and
Y direction higher order frequencies individuated in the ranges 8.0–8.5 Hz were characterized by low amplitude of cross spectra and lower performing values of coherence and phase. This uncertainty about the effective existence of vibration modes of the building associated to higher order frequencies is also confirmed by the absence of a clear correspondence of such frequencies in the numerical results. However, if a third experimental mode really exists at a frequency ranging in 8.0–8.5 Hz, it could be significant of some local phenomena occurring in the real behaviour of the building which are not reproduced in the FE model. Such local phenomena, as for example the lack or the ineffectiveness of connections between walls and floors, could be detected, and thus reproduced in the model, if a detailed relief of the damage state of the building has been done, but for the current level of knowledge of the building none of these phenomena has been evidenced.
The experimental frequencies detected in X and Y directions in the ranges 11–14 Hz, especially in the measures acquired under environmental conditions, could be associated in the model with springs to the fifth mode associated to the frequency of 11.7 Hz and a mass participating in Y direction of about 8% and to the seventh mode associated to the frequency of 12.4 with a mass participating in X direction of about 8%. However, for such modes the reduced amplitude of the cross-spectra experimentally observed and the low amount of mass participating given by the models lead to considering both of them as negligible.
In conclusion, the comparison between the frequencies assessed experimentally with the numerical values predicted by the FE models has evidenced that only the first two modes can be reliably identified. Moreover, considering the experimental uncertainty and the influence of the FE model adopted, a good agreement between experimental and numerical results has been achieved for the chosen values of elastic properties of the materials and of mass acting on the structure and taking into account the SSI.
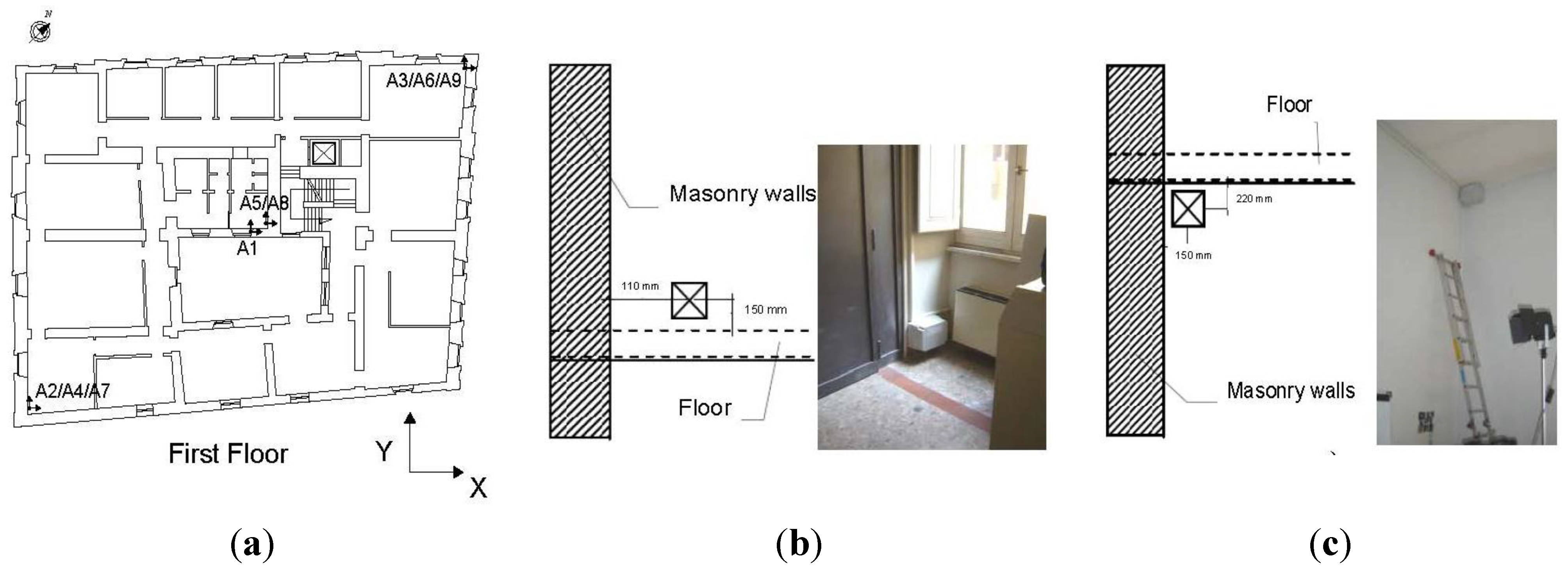
In
Figure 10 and
Figure 11, the first and the second experimental vibration modes of the structure are depicted, respectively, and compared with the numerical ones given by the fixed-base model and the model with springs. In particular, the normalized displacement of the three instrumented vertical lines have been considered, namely corresponding to the central position (sensors A1–A5–A8), the northern (sensors A3–A6–A9) and the southern (sensors A2–A4–A7) corners of the building. The experimental displacement measured in correspondence of the first and second experimental frequencies (4.3 Hz in
Y direction and 4.7 Hz in
X direction) have been normalized to the measure of the sensor placed at the top (A8, A9, and A7 for the three vertical lines, respectively). The experimental displacements of first vibration mode measured by the sensors of each vertical in Y direction have been directly compared in
Figure 10 with the theoretical ones given by the two FE models, since the first mode is completely translational in
Y direction. On the contrary, in
Figure 11, for the second mode, the experimental displacements measured in
X direction have been compared with the component in
X direction of the displacements given by the two FE models, since the numerical second mode was not completely translational in
X direction, as previously discussed.
Figure 10.
Experimental vs. numerical first vibration modes in Y direction for: (a) The central line (A1–A5–A8); (b) The northern corner (A3–A6–A9); and (c) The southern corner (A2–A4–A7).
Figure 10.
Experimental vs. numerical first vibration modes in Y direction for: (a) The central line (A1–A5–A8); (b) The northern corner (A3–A6–A9); and (c) The southern corner (A2–A4–A7).
Figure 11.
Experimental vs. numerical second vibration modes in X direction for: (a) The central line (A1–A5–A8); (b) The northern corner (A3–A6–A9); and (c) The southern corner (A2–A4–A7).
Figure 11.
Experimental vs. numerical second vibration modes in X direction for: (a) The central line (A1–A5–A8); (b) The northern corner (A3–A6–A9); and (c) The southern corner (A2–A4–A7).
The numerical vibration modes are somewhat more consistent than the experimental ones for both frequencies, especially for the displacement measured at the first floor. The larger deformability introduced by the springs placed at the ground floor only leads to a displacement shift at the basement in the model with SSI, while the shape for height is quite similar.
Notwithstanding the small difference in modal shape and frequencies (only 10%) obtained for the case at hand, the model with SSI is surely a better representation of the structure, since it allows considering the effect of the subsoil which contributes to the real dynamic behaviour of any building. The examined case study is, indeed, representative of a complete approach which accounts also for SSI in the modelling.
Other types of structure, such as tower or very deformable buildings, can be even more susceptible to SSI and it is important to model this phenomenon in evaluating their dynamic behaviour [
32,
36].
Finally, it is worth noting that further dynamic analyses carried out with the FE model with springs evidenced that as the stiffness of the springs reduces, the second vibration mode becomes more regular and shows a well-defined translational shape also in
X direction, similarly to the first vibration mode in
Y direction. In addition, the third torsional mode disappears and is substituted by the translational mode along the
Z direction which, for the adopted value of spring stiffness, is the fourth one (see
Table 4).
In conclusion, the analysis of the vibration modes confirms the necessity of introducing the SSI to have a more reliable model. Such a model may be later used for further dynamic and non-linear numerical analyses.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}